基于Simulink的坡道起步辅助装置设计及仿真
MATLAB的仿真工具箱Simulink模型的建立与仿真学习教程优秀PPT课件(基本库原件、搭建

•
Ignore limit and reset when linearizing:若勾选此选项,则表示当系统为线性化系统时,前
面的积分上下线限制和触发事件无效,默认缺省值为不勾选;
•
Enable zero-crossing detection:使系统通过零点检验,默认勾选。
• 搭建Integrator模块如图3-35所示。
•
Pulse Generator其模块属性如图3-19所示。
• 如图3-19所示Pulse Generator模块,对于其属性窗口:
• Amplitude:脉冲信号的振幅,指定为标量或矢量,默认值为1。
• Period(secs):脉冲数字采样周期,默认值为10。
• Pulse width:脉冲宽度,输入为矢量或标量,默认值为5。
• External reset:设置信号的触发事件(rising, falling, either, level, level hold, none),默认设置为 none,保持系统原态。
• Initial condition source:参数输入的状态,分为外部输入external和内部输入internal,通常默认设 置为internal。
3.3.3 Transfer Fcn模块
• Transfer Fcn其模块属性如图3-37所示。
• 如图3-37所示Transfer Fcn模块,对于其属性窗口:
• Numerator coefficients:传递函数分子系数,系统默认值为[1];
• Denominator coefficients:传递函数分母系数,系统默认值为[1,1];
• Derivative模块,表示微分环节,Derivative其模块属性如图3-31所示。 • 如图3-31所示Derivative模块,对于其属性窗口: • 搭建Derivative模块如图3-32所示。
基于simulink的车辆行驶控制系统建模与仿真

基于simulink的车辆行驶控制系统建模与仿真基于Simulink的车辆行驶控制系统建模与仿真汽车行驶控制系统是应用非常广泛的控制系统之一,其主要的目的是对汽车的速度进行合理的控制。
系统的工作原理如下:经过速度操纵机构的位置发生改变以设置汽车的速度,再测量汽车当前的速度,并求取它与指定速度的差值,最后由速度差值信号驱动汽车产生相应的牵引力,并由此牵引力改变汽车的速度直到其速度稳定在指定的速度为止。
本文采用Simulink建模,对行驶控制系统进行仿真,并采用Simulink自带的signal constraint模块对PID参数进行优化,仿真结果表明,该系统能在短时间内平稳的达到指定的速度,提高了汽车的操纵性。
1.汽车行驶控制系统的物理模型与数学描述1)速度操纵机构的位置变换器位置变换器是汽车行驶控制系统的输入部分,其目的是将速度操纵机构的位置转换为相应的速度,二者之间的数学关系如下所示:其中x速度操纵机构的位置,v为与之相应的速度。
2)离散行驶控制器行驶控制器是整个汽车行驶控制系统的核心部分。
简单来说,其功能是根据汽车当前的速度与指定速度的差值,产生相应的牵引力。
行驶控制器为一典型的PID控制器,其数学描述为:积分环节:微分环节:系统输出:其中u(n)为系统的输入,相当于汽车当前速度与指定速度的差值。
y(n)为系统输出,相当于汽车牵引力,x(n)为系统的状态。
Kp,Ki,Kd为PID控制器的比例、积分与微分控制参数。
3)汽车动力机构汽车动力机构是行驶控制系统的执行机构。
其功能是在牵引力的作用下改变汽车的速度,使其达到指定的速度。
牵引力与速度之间的关系为:其中v为汽车的速度,F为汽车的牵引力,m=1000kg为汽车的质量,b=20为阻力因子。
2.系统Simulink模型与参数设置行驶控制系统仿真模型如图1所示:图1 行驶控制系统仿真模型Set speed子系统模型如图2所示:图2 Set speed子系统模型Discrete cruise controller子系统模型如图3所示:图3 Discrete cruise controller子系统模型Car dynamics子系统模型如图4所示:图4 Car dynamics子系统模型我们预设Kp=1,Ki=0.01,Kd=0.3.系统仿真与分析当Kp=1,Ki=0.01,Kd=0时仿真结果如图5所示:图5 预设参数的仿真速度曲线这时我们运行signal constraint模块对PID参数进行优化,优化结果如图6所示:图6 优化后仿真速度曲线优化后的Kd=-5.64×10-4,Ki=0.0089,Kp=10.我们把仿真数据输出到Workspace,程序和对比图如下:>>plot(ScopeData(:,1),ScopeData(:,2),'LineWidth',1.5);>>hold on;>>plot(ScopeData1(:,1),ScopeData1(:,2),'r:','LineWidth',1.5); >>hold off;>>grid;图6经过对比能够发现优化后的参数能够更好的使汽车在较短的时间内平稳的达到指定的速度。
Simulink汽车仿真实例教学课件(一)
Simulink汽车仿真实例教学课件(一)
Simulink汽车仿真实例教学课件是一份简单易懂的教学材料,它着重
介绍汽车仿真技术以及如何使用Simulink软件进行汽车仿真。
本课件
具有如下特点:
一、逻辑清晰
课件内容涵盖汽车仿真中各个重要的方面,包括车身模型、驱动系统
模型以及车辆控制系统模型等。
每个章节都有明确的主题,结构清晰,内容简洁易懂。
二、条理分明
课件中各个模块之间有着明确的衔接关系,它们的安排与组织旨在方
便学生理解和掌握。
同一模块中,不同的部分按照相关性进行划分,
使得各个部分会呼应而不会重复。
三、结构合理
课件结构合理,采用多样化的布局设计,既方便学生浏览,又方便学
生记忆,更易于复习和总结。
每个章节的内容都旨在让学生理解到汽
车的各个方面应用,并从中发现问题与解决问题的方法。
四、分点分布排序
课件中的内容被细分为了许多分点,各个分点旨在包含一个相同主题
的相关内容,使得学生能够将多个相关的分点组合在一起,形成整个
方案。
学生可以善用这些分点,在不同的场合进行汇总与推荐。
总之,Simulink汽车仿真实例教学课件是一份非常实用的教学材料。
它涵盖了众多重要的主题,结构合理,条理分明,重点突出。
学生只
需要花费相对较短的时间,就能学会许多与汽车仿真技术相关的知识,
并能够熟练地使用Simulink软件进行汽车仿真。
如果你是汽车工程、机械制造或者自动化相关专业的学生,我强烈建议你利用这份Simulink汽车仿真实例教学课件,提升你的实践技能,也可以促进你的学习进程。
simulink_matlab仿真教程
simulink matlab仿真环境教程Simulink是面向框图的仿真软件。
演示一个Simulink的简单程序【例1.1】创建一个正弦信号的仿真模型。
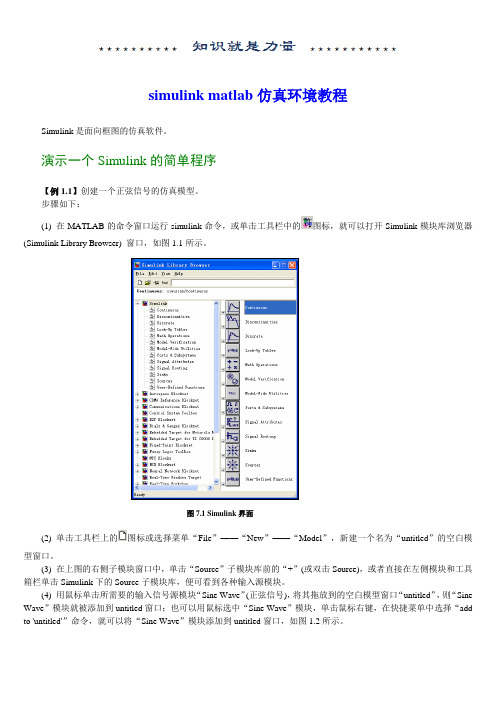
步骤如下:(1) 在MATLAB的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5)用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
基于MATLAB-SIMULINK三相感应电机软启动器的设计与仿真论文
三相异步电动机运转中电源的一相断线,使电动机在严重不对称电压下运行,称为断相运行。断相后其气隙磁场由原来的圆形旋转磁场变为幅值变动的非恒速旋转椭圆形磁场,在噪声很大的车间或井下难以辨别电动机是否正常运转,由于没有足够的重视,常常使电动机烧毁。因此,有必要设置断相保护装置。
由于是交流供电系统,不能通过检测电流是否为零来检测是否断相。对于三相对称电源,相位互差120度,输出定子三相电流之间也存在相位差。所以可以检测是否有两相电流同时为零来检测是否断相。
7.2仿真结果16
7.3结果分析20
八、结语20
九、参考文献22
一、项目背景
感应电动机以其结构简单、运行可靠、维护方便、效率较高、价格低廉等优势得以在工业生产中广泛应用。但是感应电动机的启动性能较差,启动瞬时电流冲击很大,可高达额定电流的10倍以上,且启动冲击转矩也很大,加速了电机的老化及机械损坏,对电机本身及其拖动设备的使用寿命有很严重的影响。同时也会对电网造成冲击,使供电电网产生较大的波动,从而影响同一电网中其他设备的正常工作。除此之外,如果发生缺相或欠压,则极易造成电动机烧毁。
图4-3同步信号提取电路
4.3、电流采样电路的设计
由于主要采用限流与斜坡升压软启动相结合的控制方案,软启动器工作时的主要任务是控制主回路的电流,因此要对电路进行监控控制。电路中须有电流检测电路实现电流反馈控制。这部分电路主要由电流传感器电路、绝对值电路、电压比较电路组成。
4.3.1电流传感器电路
输入主电路
电机启动的主电路采用有三组反并联晶闸管构成的三相交—交变频电路,采用同步电压检测环节来检测相电压的过零点,检测结果作用于单片机,以实现对加在感应电机上的电压进行控制。利用电流反馈检测环节,将启动电流反馈给单片机,单片机通过一定的算法改变输出电压的数字量,从而改变作用于驱动电路的模拟信号电压值,达到改变晶闸管触发角,实现调节作用于电机定子的电压,当反馈电流大于电流限定值时,触发角维持原值,不再改变直至电流减小到限定值后,继续升压直至全压。
基于Simulink的车辆起步加速过程仿真
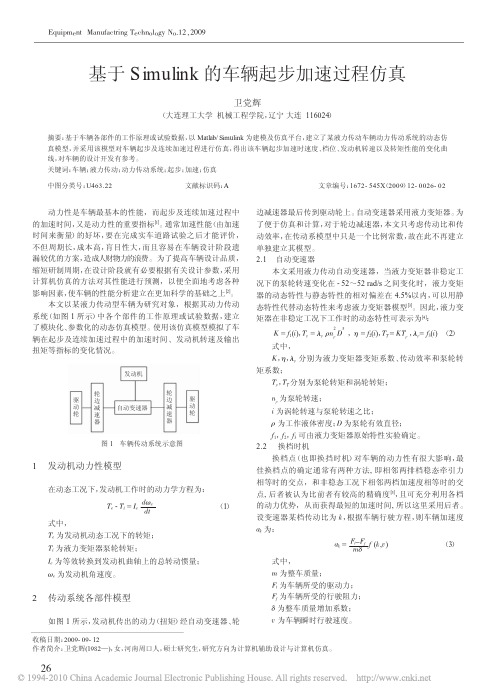
发动机
轮 驱边 动减 轮速
器
自动变速器
轮
边
驱
减
动
速
轮
器
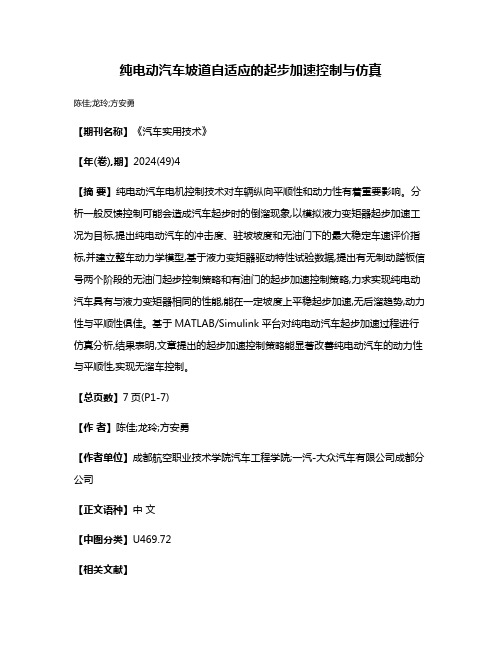
图 1 车辆传动系统示意图
针对间歇性数据传输特征和多路数据并行存储的要求,设 计了利用 FPGA 内部 FIFO 做数据过渡,多路数据统一编码处 理的数据存储方案。利用 FPGA 强大的内部资源,集成了 FPGA 内部 FIFO。提高了系统的集成度,实现了存储设备微型化。
图 4 一路数据写入的系统调试图 3.2 多路数据采集调试
Throttle 节气门开度
Ti throttle Ne
发动机
Throttle gear
Speed
换档逻辑
Ne Ti gear Nout Tout
变速器
v Tout Nout
车辆模块
图 2 动力传动系统模型
车速 (km/h)
档位
图 2 中,换档模块是由一个换档逻辑判断模块和一个换 档查询表模块所组成。其具体工作过程为:将油门开度和自动 变速器当前所处的档位送入查表子系统,然后由查表子系统 根据当前的档位和油门开度,计算出在当前档位下升档和降 档的车速,然后,查表子系统将当前档位下的升档和降档的车 速送入换档逻辑判断模块。
150
4
档位
车速(km/h)
100
3
发动机输出转矩(N.m)
50
2
车速
档位
00
10
基于Simulink的某越野车整车起步加速性能仿真
第 7期
军 事
交 通 学 院 学 报
V0 1 . 1 6 No . 7
2 0 1 4年 7月
J o u r n l a o f Mi l i t a r y T r a n s p o r t a t i o n U n i v e r s i t y
J u l y 2 01 4
T r a n s p o t r a t i o n U n i v e s r i t y , T i a n j i n 3 0 0 1 6 1 , C h i n a)
Ab s t r a c t : Us i n g Ma t l a b / S i mu l i n k s o f t w a r e ,a d y n a mi c s i mu l a t i o n mo d e l o f t h e p o w e r t r a i n s y s t e m o f a v e h i c l e e q u i p p e d wi t h
机模型、 液力变矩器模型、 机械 变速器模型以及整车行驶 动力学模型 , 并对整车加速性能进行仿真 ,
得 出车辆 在 9 0 % 油 门开度起 步加 速 时车速 、 挡位 变化 曲线 , 并 与试 验 结果 进 行对 比。结 果表 明 , 仿 真 结果 与试 验结果 基本 一致 , 该 整车 动力传 动 系统模 型的 建模 方法 是正确 的 。
Z h a n J u n q i n g ,L i Yu n b i n g ,Z h u Xi a n mi n
( 1 . N a t i o n a l E m e r g e n c y T r a n s p o r t a t i o n E q u i p m e n t E n g i n e e i r n g R e s e a r c h C e n t e r , Mi l i t a y r
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
基于Matlab_Simulink的车辆起步过程的仿真
-
结论
基于 8:0>:? + @-,A>-.( 仿真环境 " 采用 模 块 化
的建模方法建立了车辆起步过程的动态模型 # 并 对该模型进行封装 " 形成了一个车辆起步过程的 仿真软件 # (/) 此仿真模型可以用于研究离合器充油特 性对车辆起步性能的影响 " 并可以进一步与离合 器充油缓冲特性的控制系统相结合 " 形成完整的 仿真系统 " 可用于测试控制算法 # (!) 此仿真模型采用模块化的建模方法 " 具 有很好的可移植性 " 可作为车辆系统动态仿真的 子系统 # 参考文献
/" $摩擦片间隙"34,, $系统操作油压 /3489:$ 给定 发动机转速/!""* + ,-.&
仿真模型中假设充油过程是瞬间完成的 " 即 不考虑阀的动态性能对充油压力的影响 & 给定缓 冲曲线 ( 图 ’)" 得出的离合器结合过程的时间位 移曲线 ( 图 # )# 图 4 为车辆起步过程的冲击度变 化曲线图 #
式中 ! 为活塞的质量 # !! 为变动部分的质量 # ) 为活塞 " 主动片和被动片的总质量 # & 为回位弹 簧的刚度 # #"为弹簧的初始压缩量 # # 为活塞的位 移 # %为阻尼系数 # ( 为油压的作用力 # 分为静油 压和旋转油压 ! 离合器结合传递扭矩计算公式如下 $
般该值不超过*"9 : ;(!
一个合理回收期的范围 " 近几年 ! 我国的国民经 济 整 体 的 增 长 速 度 为 () ! 汽 车 消 费 平 均 每 年 的 增长率为 *+) ! 参照国家建设项目投资回收期的 有关规定 ! 假设在其他条件不变的情况下 ! 业内 人士普遍认为 ! 汽车品牌专卖店建设的合理回收 期的范围应为 , 年左右 " 我们不考虑维修保养及 买配件等的收益 ! 忽略货币的时间价值等因素 " 合理的建店数量为 %
基于simulink的车辆行驶控制系统建模与仿真
基于simulink的车辆行驶控制系统建模与仿真第一篇:基于simulink的车辆行驶控制系统建模与仿真基于Simulink的车辆行驶控制系统建模与仿真汽车行驶控制系统是应用非常广泛的控制系统之一,其主要的目的是对汽车的速度进行合理的控制。
系统的工作原理如下:通过速度操纵机构的位置发生改变以设置汽车的速度,再测量汽车当前的速度,并求取它与指定速度的差值,最后由速度差值信号驱动汽车产生相应的牵引力,并由此牵引力改变汽车的速度直到其速度稳定在指定的速度为止。
本文采用Simulink建模,对行驶控制系统进行仿真,并采用Simulink自带的signal constraint模块对PID参数进行优化,仿真结果表明,该系统能在短时间内平稳的达到指定的速度,提高了汽车的操纵性。
1.汽车行驶控制系统的物理模型与数学描述1)速度操纵机构的位置变换器位置变换器是汽车行驶控制系统的输入部分,其目的是将速度操纵机构的位置转换为相应的速度,二者之间的数学关系如下所示:其中x速度操纵机构的位置,v为与之相应的速度。
2)离散行驶控制器行驶控制器是整个汽车行驶控制系统的核心部分。
简单来说,其功能是根据汽车当前的速度与指定速度的差值,产生相应的牵引力。
行驶控制器为一典型的PID控制器,其数学描述为:积分环节:微分环节:系统输出:其中u(n)为系统的输入,相当于汽车当前速度与指定速度的差值。
y(n)为系统输出,相当于汽车牵引力,x(n)为系统的状态。
Kp,Ki,Kd为PID控制器的比例、积分与微分控制参数。
3)汽车动力机构汽车动力机构是行驶控制系统的执行机构。
其功能是在牵引力的作用下改变汽车的速度,使其达到指定的速度。
牵引力与速度之间的关系为:其中v为汽车的速度,F为汽车的牵引力,m=1000kg为汽车的质量,b=20为阻力因子。
2.系统Simulink模型与参数设置行驶控制系统仿真模型如图1所示:图1 行驶控制系统仿真模型 Set speed子系统模型如图2所示:图2 Set speed子系统模型Discrete cruise controller子系统模型如图3所示:图3 Discrete cruise controller子系统模型Car dynamics子系统模型如图4所示:图4 Car dynamics子系统模型我们预设Kp=1,Ki=0.01,Kd=0.3.系统仿真与分析当Kp=1,Ki=0.01,Kd=0时仿真结果如图5所示:图5 预设参数的仿真速度曲线这时我们运行signal constraint模块对PID参数进行优化,优化结果如图6所示:图6 优化后仿真速度曲线优化后的Kd=-5.64×10-4,Ki=0.0089,Kp=10.我们把仿真数据输出到Workspace,程序和对比图如下: >>plot(ScopeData(:,1),ScopeData(:,2),'LineWidth',1.5);>>ho ldon;>>plot(ScopeData1(:,1),ScopeData1(:,2),'r:','LineWidth',1.5);> >hold off;>>grid;图6 通过对比可以发现优化后的参数可以更好的使汽车在较短的时间内平稳的达到指定的速度。
基于matlab,simulink汽车三自由度模型仿真
作业任务包括:一、建立前轮角阶跃输入的汽车三自由度操控模型,并且参数可调。
二、绘制六面体并实现对六面体的三维操作,包括平移、旋转、缩放等。
三、动画:本文动画的实现是在对六面体的具体操作过程(平移、旋转、缩放)中表现。
四、GUI与simulink的联合仿真,并将所有作业内容集成到GUI界面,将程序进行编译,打包生exe的成可执行文件。
汽车三自由度操控模型1.1建模假设:•1、汽车车速不变。
•2、不考虑切向力对轮胎特性的影响。
•3、侧向加速度不大于0.3-0.4g 。
•4、前轮转角不大,不考虑前轮左右的区别。
•5、不考虑非悬架质量的倾角。
•6、不考虑空气动力作用。
•7、侧倾中心与非悬架质心等高,前后一样。
•8、左右对称。
假设汽车的结构:•前面是独立悬架。
•后面是纵置半椭圆板簧。
•车厢侧倾引起:前轮外倾角变化;后轴发生轴转向;左右侧车轮载荷重新分配引起滚动阻力不相等而产生绕Z轴的力矩。
1.2汽车模型受力分析车辆坐标系如图1所示图1 车辆坐标系M、Ms、Mu分别是整车、悬挂和非悬挂质量,M=Ms、Mu其质心分别是c.g. 、s和u。
如图二所示图2 车辆质量分布示意图汽车三自由度模型的三个自由度指:汽车沿y 轴平动的自由度、汽车绕z 轴的转动自由度、汽车绕x 轴的转动自由度。
一般分别用横向速度v 、横摆角速度r 、侧倾角φ来表征。
汽车三自由度模型的微分方程为:()()s r z xz r p s x xz s p M v rV M h Y Y r Y Y I r I N N r N N N p I I r M h v rV L L βφδβφδφφβφδφβφδφφφ⎫++=+++⎪-=++++⎬⎪-++=+⎭(1-1)其中各个参数的意义如下:算子说明:21k k Y +=β ()211bk ak VY r -=122Y Y Y k φαφφ∂∂=-∂∂ 其中:11YY γ∂∂前轮外倾刚度;1γφ∂∂侧倾外倾角系数;2αφ∂∂后轴侧倾转向系数。
实验四-SIMULINK仿真模型建立及仿真
实验四 SIMULINK仿真模型的建立及仿真(一)一、实验目的:1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。
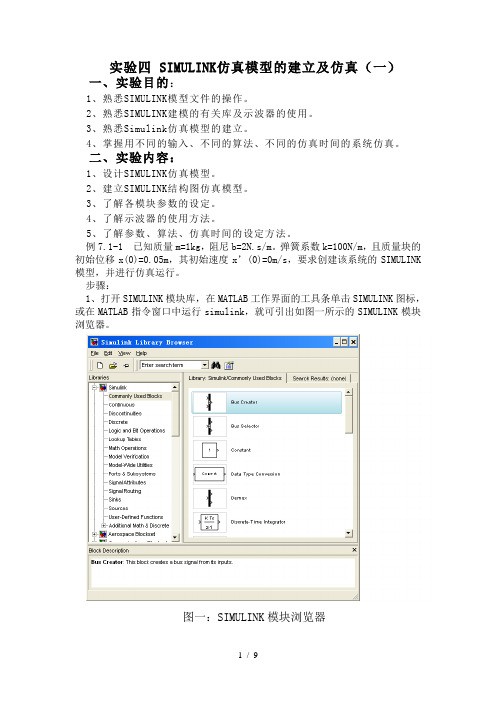
步骤:1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:图三:已构建完成的新模型窗6、根据理论数学模型设置模块参数:①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;图四:参数已经修改为2的<Gain>增益模块设置窗②参照以上方法把<Gain1>增益模块的增益系数改为100;③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;图五:改变输入口符号的求和模块参数设置窗④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件Initial condition 栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。
基于Simulink的坡道起步辅助装置设计及仿真
1
基于 Simulink 的车辆坡道起步控 制策略设计及仿真
1 汽车坡道起步的受力分析 1.汽车停在坡道上时的受力情况 如图 3.1 所示,一辆前轮驱动的汽车稳定地停在坡度角为α 的上 坡道上。此时,汽车所售的状态为:手刹处于拉起状态,变速杆处于 空挡位置。
图 3.1 停驻在上坡道上的汽车受力分析
4 仿真所需数据 本文进行仿真计算时所用数据,采用 Santana2000 型轿车的有关数 据。 Santana2000 型轿车采用的是 MF210 型推式膜片弹簧离合器。该 离合器的基本参数如下:
7
基于 Simulink 的车辆坡道起步控 制策略设计及仿真
表 4.1 MF210 型推式膜片弹簧离合器基本参数 R(mm) 97.0 r(mm) 77.0 L(mm) 94.25 l(mm) 77.0
n
α
12% 50.0 28.4
表 4.3 Santana2000 发动机稳态特性试验数据 22% 29% 38% 47% 57% 67% 76.7 57.1 38.7 26.7 93.6 84.9 67.6 51.1 40.0 28.4 20.2 99.8 102.9 94.4 81.1 70.0 57.3 47.8 37.3 35.1 23.3 104.4 111.6 108.9 100.4 91.1 82.7 72.2 61.1 58.9 47.8 40.4 108.9 120.4 122.4 120.0 115.8 110.0 101.1 92.9 91.6 79.9.1 131.3 131.1 128.9 124.4 124.4 118.9 108.4
rF(mm)
22.0
R—膜片弹簧外半径;r—膜片弹簧内半径;L—外支承半径;l—内支 承半径;rF —小端加载半径
基于PID控制的坡道起步控制仿真与试验研究
基于PID控制的坡道起步控制仿真与试验研究王洪亮;张庆渴;谷文豪;黄涤【摘要】针对汽车坡道起步过程中的驻车制动力释放滞后问题,提出了坡道起步过程中气压式电子驻车系统的PID控制方法.首先,在AMEsim中建立了简化的气压式电子驻车系统模型,进行驻车制动释放过程的仿真,并通过实车试验,验证了模型的正确性.接着提出了坡道起步过程中气压式电子驻车制动系统的PID控制方法,根据坡道阻力和发动机驱动力算得目标气压,搭建了气压式电子驻车系统的PID控制模型,并进行了坡道起步过程的仿真和实车试验验证.结果表明,所提出的电子驻车制动系统的PID控制方法能准确控制驻车制动气压值随目标气压的变化,驻车制动释放及时,有效解决了驻车制动力释放滞后的问题,达到良好的坡道起步效果.%Aiming at the delay of parking braking force release in hill start process, a PID control scheme for a pneumatic electronic parking brake ( PEPB) system in hill-start process is proposed. Firstly, a simplified mod-el for PEPB system is build with AMEsim and a simulation on hill-start process is conducted with its results and hence the correctness of model built verified by real vehicle tests. Then, a PID control method for PEPB system in hill start process is put forward and the desired air pressure is calculated based on slope resistance and engine driv-ing force. A PID control model for PEPB system is constructed and both simulation and real vehicle verification test are performed. The results show that the PID control scheme proposed for PEPB system can accurately control the air pressure for parking brake changing with desired one and timely release parking brake, so effectivelysolving the problem of parking braking force release delay and achieving a good result of hill start.【期刊名称】《汽车工程》【年(卷),期】2017(039)004【总页数】6页(P480-485)【关键词】驻车制动;坡道起步;PID控制;仿真;试验【作者】王洪亮;张庆渴;谷文豪;黄涤【作者单位】南京理工大学机械工程学院,南京 210000;南京理工大学机械工程学院,南京 210000;南京理工大学机械工程学院,南京 210000;南京理工大学机械工程学院,南京 210000【正文语种】中文车辆坡道起步是车辆行驶过程中出现频率较高、事故率较高的复杂工况,对驾驶员的操控技术提出很高要求,坡道起步辅助技术一直是国内外的研究热点[1-3]。
adas simulink实例

ADAS(Advanced Driver Assistance Systems,高级驾驶辅助系统)是一种利用传感器和计算机技术来辅助驾驶员进行车辆控制和安全驾驶的系统。
Simulink是一种广泛使用的模型设计和仿真工具,可以用于开发和测试ADAS系统。
以下是一个简单的ADAS Simulink示例,展示了如何使用Simulink设计一个车道保持辅助系统:1. 打开Simulink,创建一个新的模型。
2. 在Simulink库浏览器中,选择"Sources"(信号源)选项,并将"Constant"(常数)块拖放到模型中。
这个块将充当车辆的传感器,提供车辆当前位置的信息。
3. 从"Continuous"(连续)选项中选择"Step"(阶跃)块,并将其拖放到模型中。
这个块将模拟控制指令,决定车辆是否需要调整方向。
4. 从"Discrete"(离散)选项中选择"Transfer Fcn"(传递函数)块,并将其拖放到模型中。
这个块将代表车辆的动力学行为,根据输入的控制指令改变车辆的方向。
5. 从"Commonly Used Blocks"(常用块)选项中选择"Sum"(求和)块,并将其拖放到模型中。
这个块将用于将车辆的当前位置和控制指令进行求和运算。
6. 从"Continuous"(连续)选项中选择"Transfer Fcn"(传递函数)块,并将其拖放到模型中。
这个块将代表车辆的轨迹控制器,计算出调整车辆方向的控制信号。
7. 连接这些块,确保信号流按照设计的逻辑正确传递。
例如,将Constant块的输出连接到Sum块的一个输入,将Step块的输出连接到Sum块的另一个输入,将Sum块的输出连接到Transfer Fcn块的输入,最后将Transfer Fcn块的输出连接到Scope块,以便可视化结果。
汽车级Simulink建模与仿真

MinMax
9. 判正负
Sign
10. 汇总器
Mux
11. 开关
Switch
Sources Sources Sinks Sinks Math Operations Math Operations Math Operations Math Operations Math Operations Signal Routing Signal Routing
根据下列数学模型,用 Simulink 建模仿真。
1. 节气门开度(输入):
2. 负载扭矩(输入):
6
实战1:一个发动机模型
3. 进入进气歧管的空气质量速度:
7
实战1:一个发动机模型
4. 进气歧管的压力变化速度:
8
实战1:一个发动机模型
5. 离开进气歧管的空气质量速度(即进入气缸的空 气质量速度):
Combinatorial Logic:组合逻辑模块;
27
实战2:离合器接合 /分离模型
Simulink模型:
Tin
slipping
Tfmaxk
wv
Tin
we
NOT
Fn
回调函数 的使用
Tfmaxk Fn
Tfmaxs
part6 1
Gain1
Scope2
1 Gain
Tin
w
locked
locked Tin
Continuous
2. 查找表
Lookup TableLoopup Tables
3. 积分器(限幅)Integrator
Continuous
4. 终止仿真
Stop
Sinks
防止“ 除零 ”而采取的措施: 1.0 – u(1) / (u(2) + (u(2) == 0) * eps)
(有具体仿真,有各种图)(基于SIMULINK异步电动机软起动控制系统的仿真
第26卷第3期 辽 宁 工 学 院 学 报 V ol.26,No.3 2 0 0 6 年6月 Journal of Liaoning Institute of Technology Jun. 2006收稿日期:2005-03-14作者简介:耿大勇(1971-),男(满族),辽宁兴城人,副教授,硕士。
基于SIMULINK 异步电动机软起动控制系统的仿真耿大勇1,贾 丹2,李振刚1(1.辽宁工学院 信息科学与工程学院,辽宁 锦州 121001; 2.辽宁工学院 计算机科学与工程学院,辽宁 锦州121001)摘 要:异步电动机的软起动可控制电动机的起动电压和电流,减少电动机起动过程对电网和负载的冲击,同时保证电动机运行平稳。
利用MATLAB 软件中的动态仿真工具Simulink 对采用PI 电流闭环控制的异步电动机软起动系统建模并进行了实例仿真。
仿真结果和实验结果吻合较好,证明仿真方法是正确、有效的。
关键词:异步电动机;软起动;仿真;Simulink中图分类号:TP391.9 文献标识码:A 文章编号:1005-1090(2006)03-0141-04Simulation of Soft Starting Control System forAsynchronous Motor Based on SIMULINKGENG Da-yong 1, JIA Dan 2, LI Zhen-gang 1(rmation Science & Engineering College, Liaoning Institute of Technology, Jinzhou 121001, China puter Science & Engineering College, Liaoning Institute of Technology, Jinzhou 121001, China)Key words: asynchronous motor; soft starting; simulation; SimulinkAbstract: By using soft starting , the starting voltage and starting current of asynchronous motor can be controlled, the impact on electric power system and load during the startup can be reduced, and also enables asynchronous motor to rotate steadily. The simulation model of soft starting system by using PI current closed loop control for asynchronous motor was established based on MATLAB/Simulink and simulation was carried out through actual example. The simulation results were close to the experimental ones, which verified the correctness and validity of the simulation method.近年来,随着电力电子技术和计算机控制技术的飞速发展,国内外都十分重视三相异步电动机软起动控制系统的研究和开发[1,2]。
纯电动汽车坡道自适应的起步加速控制与仿真
纯电动汽车坡道自适应的起步加速控制与仿真
陈佳;龙玲;方安勇
【期刊名称】《汽车实用技术》
【年(卷),期】2024(49)4
【摘要】纯电动汽车电机控制技术对车辆纵向平顺性和动力性有着重要影响。
分析一般反馈控制可能会造成汽车起步时的倒溜现象,以模拟液力变矩器起步加速工况为目标,提出纯电动汽车的冲击度、驻坡坡度和无油门下的最大稳定车速评价指标,并建立整车动力学模型,基于液力变矩器驱动特性试验数据,提出有无制动踏板信号两个阶段的无油门起步控制策略和有油门的起步加速控制策略,力求实现纯电动汽车具有与液力变矩器相同的性能,能在一定坡度上平稳起步加速,无后溜趋势,动力性与平顺性俱佳。
基于MATLAB/Simulink平台对纯电动汽车起步加速过程进行仿真分析,结果表明,文章提出的起步加速控制策略能显著改善纯电动汽车的动力性与平顺性,实现无溜车控制。
【总页数】7页(P1-7)
【作者】陈佳;龙玲;方安勇
【作者单位】成都航空职业技术学院汽车工程学院;一汽-大众汽车有限公司成都分公司
【正文语种】中文
【中图分类】U469.72
【相关文献】
1.基于纯电动汽车的坡道起步控制策略研究
2.基于纯电动汽车的坡道起步控制策略研究
3.纯电动汽车坡道起步防溜系统及控制策略的研究
4.纯电动汽车坡道起步辅助控制策略研究
5.纯电动汽车坡道自适应起步控制策略
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Simulink的车辆坡道起步控制策略设计及仿真摘要汽车电子技术是汽车技术与电子技术相结合的产物。
随着汽车工业与电子工业的不断发展,在现代汽车上,电子技术的应用越来越广泛,汽车电子化的程度也越来越高。
它大大提高了汽车使用的方便性,降低了驾驶员的劳动强度,进一步满足了人们对汽车的使用要求。
HAS是一种主动控制功能,驾驶员可通过HAS开关选择是否启用这一功能。
HAS可有效避免车辆坡道起步时,驾驶员松开制动踏板到踩下加速踏板过程中的后溜。
典型的HAS主要通过控制位于制动主缸和车轮轮缸之间的隔离阀通断实现坡道起步辅助功能。
当车辆在坡道起步时,未利用驻车制动防止后溜,驾驶员踩下制动踏板触发隔离阀通电,关闭轮缸至主缸方向的油路,保持轮缸压力,给驾驶员足够的时间换挡和踩下油门踏板。
当离合器结合到一定程度时,其传递的扭矩刚好能克服起步阻力时隔离阀断电,迅速解除制动,实现平稳起步。
本文首先分析了AMT坡道起步的控制难点,并且对AMT的结构和控制原理及主控程序进行了研究,提出了对主控程序中起步控制部分的改进,提出了AMT的坡道起步辅助系统的自动控制问题,即去除驾驶员的坡度判断环节,建立了以离合器主、从动盘为核心的坡道起步动力学模型,对模型的分析,得出离合器的控制规律。
通过仿真验证了HAS系统自动控制方法的可行性和有效性。
1 汽车坡道起步的受力分析1.汽车停在坡道上时的受力情况如图3.1所示,一辆前轮驱动的汽车稳定地停在坡度角为α的上坡道上。
此时,汽车所售的状态为:手刹处于拉起状态,变速杆处于空挡位置。
图3.1 停驻在上坡道上的汽车受力分析此时,驻车制动器会对车轮产生相应的制动力,称为制动器制动力Fu=Tu/r,其中Tu为制动器的摩擦力矩,r为车轮半径。
汽车会再重力和坡度的综合作用下,产生沿坡道与汽车前进方向相反的坡道阻力F i=Gsinα,其中G为汽车的重量。
同事,汽车被制动的车轮会再地面的作用下,收到一个附着力的阻滞作用,该力即地面制动力Fxb,它是使汽车安全地停驻在坡道上的主要依据。
另外,在垂直于坡道的方向上,在前后车轮接地点会产生法向反作用力Fz1和Fz2,重力在此方向上产生一个分力Gsinα。
汽车所受到的外力满足下列基本关系式:Gsinα=F xb………………………………………………………………(3.1)Gcosα=F z1+F z2……………………………………………………(3.2)其中,3.1式表明地面制动力与坡道阻力的平衡;3.2式表明在垂直于坡道方向上的受力平衡,同事,这些力也是形成附着力的基础,为汽车形式提供驱动条件。
2坡道起步时的车辆动力学模型车辆动力传动系统工作机理较为复杂,从发动机的动力输出端至车轮的动力传递过程中,要经过众多环节,各环节对动力传递过程的影响不尽相同,为分析车辆起步过程中最主要的影响因素,对动力传动系模型作一下基本假设:1)忽略发动机扭振、轴的扭振和离合器减震器对系统的影响;2)忽略轴的横向振动;3)将各元件视为完全刚性无阻尼的惯性元件,并以集中质量的形式表示;4)忽略系统其它运动副的间隙;5)除离合器和同步器的摩擦力外,忽略轴承和轴承座的摩擦阻力、搅油阻力等系统其它运动副的摩擦阻力;6)假定车轮与地面间无滑转和滑移。
通过3.1节中对车辆在坡道起步过程中的受力分析:车辆平稳起步的关键是对离合器的接合控制。
因此本文建立以离合器主动盘和从动盘为核心的车辆坡道起步动力学模型,如图3.4所示。
图3.4 汽车传动系统等效模型3坡道起步的控制方法由3.2.1的坡道起步动力学模型分析,汽车AMT系统实现坡道顺利起步的关键在于离合器、发动机和制动器释放的协调控制。
尤其通过对离合器的接合过程的控制,让发动机输出扭矩接替克服坡道下滑力的制动器制动力矩的时刻恰到好处,才能使车辆不发生后滑,同时,根据道路阻力确定离合器的接合的程度,根据发动机转速的变化控制节气门开度,以保证车辆在坡道上无后滑地平稳起步。
故选取的控制参数有:1)离合器的半接合点位置;2)离合器接合过程中的接合速度;3)油门开度。
1.控制策略由上一节的分析,不难得出可将离合器的接合过程分为4个阶段,即消除离合器间隙阶段(OA)、克服起步阻力阶段(AB)、起步加速阶段(BC)和同步接合阶段(CD),如图3.5所示,T c为摩擦力矩,n e为发动机转速(即离合器输入轴转速),n c为离合器输出轴转速。
图3.5 起步时离合器接合过程示意图(1)离合器接合过程控制品质的评价离合器接合控制的品质是以平稳性和使用寿命来评价的,并采用冲嫉妒j 和滑磨功W 来度量。
1)冲击度j冲季度j 为汽车纵向加速度的变化率,即j (t )=d 2u dt由汽车理论知,汽车的行驶方程为 F t =F f +F w +F i +F j 也即T c i g i 0ηTr=Gfcosα+C D A 21.15(3.6u )2+Gsinα+δmdu dt当汽车坡道起步时F ω≈0,而F i 和F f 近似不变。
所以加速度为:du dt=1δm(T c i g i 0ηTr−F f −F i )故,j (t )=d 2u dt =1δm i g i 0ηT r dT cdt…………………………………(3.20)2)滑磨功W W =∫T c(t )ωe (t )dt t 2t 1+∫T C(t)[ωe (t )−ωc (t )]dt t 3t 2…(3.21)式中t 1、t 2、t 3的含义见图3.5所示。
(2)控制策略在实际控制过程中,由于只能通过检测离合器的半接合点来判断车辆车辆是否已经起步;而由式(3.21)知,为了缩短离合器的接合时间和减少[t1,t2]时间段的滑磨功,应将消除离合器空行程的快速接合阶段后延至离合器的半接合点处,以便加快[t1,t2]时间段的接合速度。
因此将坡道起步时离合器的接合过程分为三个阶段控制,采用快-慢-快三阶段控制策略:1)起步前地快速接合阶段(OB):此阶段主要是消除离合器空行程和克服起步阻力,因此应快速接合离合器。
控制目标是准确地寻找到半接合点x0,并且反应驾驶员的起步意图及根据起步意图确定可接受的最大冲季度。
2)起步加速阶段(BC):此阶段的初期既要防止由于起步过猛而产生过大的冲击,又要防止发动机熄火。
因此控制目标是使n c平稳上升,以减小起步的冲击。
3)同步接合阶段(CD):因离合器主、从动摩擦片已经同步,因此快速接合离合器也不会引起冲击,从而完成离合器的整个接合过程。
2.控制方法1)起步前地快速接合阶段(OB):由(3-20)式可得,j(t)=1δm i g i0ηTrdT cdt=1δmi g i0ηTrdT c(X)dxdxdt一般j的允许值为10m s3⁄,若要保证j(t)<m s3⁄,只需对于任意xdx dt <101δmg0TrdT c(X)dx………………………………………………………(3.22)把v max(x)称为最大允许接合速度。
则在[0,t2]时间段(离合器接合至半接合点之前过程)选取离合器接合速度v max=min{v max(x),v max(x0)}=min{v max(x),v max(x0)},此时离合器将允许冲击度地条件下快速的接合。
对于坡上起步,在这一离合器接合阶段过程中,如果油门开度小时,起步是不安全的此时离合器应禁止接合。
于一定值βSantana2000型轿车的车辆总质量为1460Kg,最大爬坡度为30%,即α=17°。
2)起步加速阶段(BC):该阶段是离合器控制的关键阶段。
如果离合器接合速度过快,将会造成冲击,起步过猛;而如果接合速度过慢,离合器摩擦片处于滑动摩擦状态的时间过长,滑磨功过大。
故应该使n c平缓上升,又要减少滑磨时间。
3)同步接合阶段(CD):改阶段以主动盘和从动盘的转速达到同步为起点直到离合器行程结束。
此阶段以快速接合为目的,因为两盘转速已达同步,滑动摩擦基本降为零,快速接合不会导致冲击。
4 仿真所需数据本文进行仿真计算时所用数据,采用Santana2000型轿车的有关数据。
Santana2000型轿车采用的是MF210型推式膜片弹簧离合器。
该离合器的基本参数如下:F(mm)97.0 77.0 94.25 77.0 22.0R—膜片弹簧外半径;r—膜片弹簧内半径;L—外支承半径;l—内支承半径;r F—小端加载半径表4.2 Santana2000整车的一些基本参数r(m)M(kg)A()3.4554.111 0.92 0.288 1460 0.37 2.018 1.5175i1-变速器I档传动比;i0-主减速器的传动比;ηT-传动系的机械效率;r-车轮半径;M-整车总质量;C D-空气阻力系数;A-迎风面积;δ-汽车旋转质量换算系数表4.3 Santana2000发动机稳态特性试验数据n α12% 22% 29% 38% 47% 57% 67% 80% 100%1200160020002400280032003600400044004800520050.028.476.757.138.726.793.684.967.651.140.028.420.299.8102.994.481.170.057.347.837.335.123.3104.4111.6108.9100.491.182.772.261.158.947.840.4108.9120.4122.4120.0115.8110.0101.192.991.679.669.6108.9125.6129.3129.1131.3131.1128.9124.4124.4118.9108.4108.9125.6131.1131.1138.7137.8135.6133.1132.2128.9121.3118.7131.6137.8142.4148.9150.7145.6137.8140.0140.4130.0 (根据1996/10/21吉林工业大学液力机械研究所的试验报告)5 AMT车辆坡道行驶状态识别仿真分析1.坡道行驶状态识别模型图4.4 装有坡道行驶状态识别模块的AMT车辆仿真模型6 AMT车辆HAS系统的坡道起步仿真分析本文利用MATLAB/Simulink软件建立发动机模型、离合器模型、变速器模型、车体模型以及HAS控制器和离合器控制器,所建立的整车模型如图4.8所示。
图4.8 整车仿真模型1)10%破路起步仿真结果(f=0.016)(a)离合器分离轴承位移变化曲线(b)离合器主从动片转速变化曲线由仿真结果曲线分析得到的结果数据如表4.4所示表4.4 仿真参数及结果道路状况平路起步10%坡道起步油门开度(%)15 30滑磨时间(s) 1.6 1.0 半接合点时刻(s)0.49 0.38由表4.4可以看出,基于起步阻力辨识和坡道行驶状态辨识的HAS 系统能够依据HAS自动控制逻辑与方法对HAS阀进行正确的通断控制,使制动力释放时刻合理准确。