北京天文台施密特望远镜驱动系统的改进设计
2《心有一团火,温暖众人心》练习 (含答案)统编版高中语文必修上册
2《心有一团火,温暖众人心》练习(含答案)统编版高中语文必修上册4.2《心有一团火,温暖众人心》练习一、实用类文本阅读阅读下面的文字,完成下列小题。
踏过平庸,一生为中国“天眼"燃尽陈芳董瑞丰刘宏宇“天眼”之父南仁东,17日被追授“时代楷模"荣誉称号24年,8000多个日夜,500米口径球面射电望远镜首席科学家、总工程师南仁东心无旁骛,为崇山峻岭间的中国“天眼”燃尽生命,在世界天文史上镌刻下新的高度。
调试期的“天眼"已经一口气发现多颗脉冲星,成为国际瞩目的宇宙观测“利器”。
在党的十九大报告中,“天眼"与“天宫”“蛟龙"、大飞机等一起,被列为创新型国家建设的丰硕成果……南仁东来不及目睹。
但他执着追求科学梦想的精神,将激励一代又一代科技工作者接续奋斗,勇攀世界科技高峰。
“天眼”:一个国家的骄傲看似一口“大锅",“天眼”是世界上最大、最灵敏的单口径射电望远镜,可以接收到百亿光年外的电磁信号。
它有着超高的灵敏度和巡天速度。
与美国寻找地外文明研究所的“凤凰"计划相比,“天眼”可将类太阳星巡视目标扩大至少5倍。
随着“天眼"的落成,中国射电天文学“黄金期”正在开启,越来越多国际天文学专家加入中国主导的科研项目。
20多年前,这是一个异常大胆的计划。
20世纪90年代初,中国最大的射电望远镜口径不到30米。
1993年,日本东京,国际无线电科学联盟大会在此召开。
科学家们提出倡议:在全球电波环境继续恶化之前,建造新一代射电望远镜,接收更多来自外太空的讯息。
会后,南仁东极力主张中国科学家启动“天眼"项目。
“天眼”到底是一个多大的工程?在“天眼"馈源支撑系统高级工程师杨清阁的印象里,这个工程大到“漫山遍野”。
这又是一个多细的工程?“600多米尺度的结构,馈源接收机在天空中跟踪反射面焦点的位置度误差不能超过10毫米。
"杨清阁说,“南老师做的事,就是带领我们用漫山遍野的设备和零件建起这口精密的‘大锅’。
施密特望远镜

施密特望远镜科技名词定义中文名称:施密特望远镜英文名称:Schmidt telescope定义:由一块凹球面镜和一块置于球面镜曲率中心处的薄板状非球面改正透镜所组成的一种折反射望远镜。
因发明者而得名。
所属学科:天文学(一级学科) ;天文仪器(二级学科)本内容由全国科学技术名词审定委员会审定公布百科名片施密特望远镜(Schmidt telescope)是一种由折射和反射元件组成的天文望远镜。
1931年为德国光学家施密特﹐B.V.所发明﹐因此得名。
这种望远镜由一块接近平行平板的非球面改正透镜和一个凹球面反射镜组成,星光在望远镜里先通过折射,再经过反射,然后才成像。
施密特望远镜光力强,可见范围大,成像的质量也比较好,因而特别适用于进行流星,慧星,人造卫星等的巡视观测,也常用于大面积造相和天文科普活动。
改进组成原理优点缺点历史LAMOST改进对某些工作,施密特望远镜可作不同的改变,如增加平场透镜把焦面改成平面;增加一个凸面副镜把焦点引到主镜的背面或附近,形成卡塞格林系统(见卡塞格林望远镜)。
贝克-施密特望远镜光路图美国光学家贝克首先对这种系统进行了研究,经他改进的这种望远镜,称为贝克-施密特望远镜。
组成施密特望远镜由一块接近平行平板的非球面改正透镜和一个凹球面反射镜组成。
原理虽然凹球面反射镜具有球差,但它有一个重要特性──镜面对于球心是对称的。
如果在球心处设置一个限制光束的光阑,那么对于不同倾角入射的光束,除了光阑在斜光束方向的投影与正方向不同外,成像条件都完全相同,不存在光轴上和光轴外的差异。
因而,在球面镜的焦面上各处的像点都是对称的,具有相同球差造成的小圆斑。
施密特望远镜光学系统在这种情况下,除了球差和场曲外,不存在其他像差。
为改正球差,施密特,B.V.不是象过去人们所做的那样,破坏这一对称成像条件,把镜面形状改成抛物面,而是在光阑处放置一块与平行平板差别不大的、非球面的改正透镜(常称施密特改正透镜)。
施密特-卡塞格林系统的优化设计

施密特-卡塞格林系统的优化设计本次实验将使用到:polynomial aspheric surface, obscurations,apertures, solves, optimization, layouts, MTF plots。
本次实验是完成Schmidt-Cassegrain 及polynomial aspheric corrector plate。
这个设计是要在可见光谱中使用,需要一个10 inches的aperture 和10 inches 的back focus。
开始,先把primary corrector, System, General, 在aperture value 中键入10。
同在一个screen 把unit “Millimeters”改为“Inches”。
再把Wavelength 设为3个,分别为0.486,0.587,0.656,且0.587定为主波长。
也可以在wavelength 的screen 中按底部的select 键,选默认波长。
默认的field angle value,其值为0。
依序键入如下LED 表的相关数据,此时the primary corrector为MIRROR 球镜片。
2D图如下:现在加入第二个corrector,并且决定imagine plane 的位置。
输入如下的LDE,注意到primary corrector 的thickness 变为-18,比原先的-30小,这是因为要放second corrector 并考虑到其size 大小的因素。
在surface4 的radius 设定为variable,通过optimization, Zemax可以定下他的值。
先看看他的layout,应如下图所示。
调出merit function, reset 后,改变“Rings” option 到5。
The rings option 决定光线的sampling density(采样密度), default value 为3,此实验要求为5。
天文望远镜基础知识-天文知识

天⽂望远镜基础知识-天⽂知识天⽂望远镜基础知识-天⽂知识天⽂望远镜是现在天⽂学最基本的仪器,也是⼴⼤天⽂普及⼯作者和天⽂爱好者必备的观测⼯具。
天⽂望远镜的光学系统 根据物镜的结构不同,天⽂望远镜⼤致可以分为三⼤类:以透镜作为物镜的,称为折射望远镜;⽤反射镜作为物镜的,称为反射望远镜;既包含透镜,⼜有反射镜的,称为折反射望远镜。
往往有的天⽂爱好者买了⼀块透镜,以为这就解决了望远镜的物镜问题。
其实,⼀块透镜成像会产⽣象差,现在,正规的折射天⽂望远镜的物镜⼤都由2~4块透镜组成。
相⽐之下,折射天⽂望远镜⽤途较⼴,使⽤⽅便,⽐较适合做天⽂普及⼯作。
反射望远镜的光路可分为⽜顿系统和卡塞格林系统等。
⼀般说来,对天⽂普及⼯作,特别是对观测经验不⾜的爱好者来说,⽜顿式反射望远镜使⽤起来不太⽅便,其物镜⼜需经常镀膜,维护起来也⿇烦。
折反射望远镜是由透镜和反射镜组成。
天体的光线要受到折射和反射。
这类望远镜具有光⼒强,视场⼤和能消除⼏种主要像差的优点。
这类望远镜⼜分施密特系统、马克苏托夫系统和施密特卡塞格林系统等。
根据我们多年实践的经验,中国科学院南京天⽂仪器⼚⽣产的120折射天⽂望远镜对于天⽂普及⼯作和⼴⼤天⽂爱好者来说,是⼀种既⽅便⼜实⽤的仪器。
望远镜的光学性能 在天⽂观测的对象中,有的天体有视⾯,有的没有可分辨的视⾯;有的天体光极强,有的⼜特微弱;有的是⾃⼰发光,有的是反射光。
观测者应根据观测⽬的,选⽤不同的望远镜,或采⽤不同的⽅法进⾏观测;⼀般说来,普及性的天⽂观测多属于综合性的,要考虑“⼀镜多⽤”。
选择天⽂望远镜时,⼀定要充分了解它的基本光学性能。
⼝径--指物镜的有效直径,常⽤D来表⽰; 相对⼝径--指物镜的有效⼝径和它的焦距之⽐,也称为焦⽐,常⽤A表⽰;即A=D/F。
⼀般说来,折射望远镜的相对⼝径都⽐较⼩,通常在1/15~1/20,⽽反射望远镜的相对⼝径都⽐较⼤,通常在1/3.5~1/5。
观测有⼀定视⾯的天体时,其视⾯的线⼤⼩和F成正⽐,其⾯积与F2成正⽐。
太空望远镜的光学系统优化与设计

太空望远镜的光学系统优化与设计随着科学技术的不断进步,太空望远镜已成为现代天文学和宇宙研究中不可或缺的工具。
太空望远镜能够避免地球大气的干扰,提供更高分辨率和更清晰的图像,为我们揭示了宇宙的奥秘。
然而,为了获得最佳的观测效果,太空望远镜的光学系统优化和设计变得至关重要。
第一节光学系统的优化需求在设计太空望远镜的光学系统时,我们面对着多种优化需求。
首先,望远镜的分辨率决定了其观测能力。
因此,我们需要通过优化光学系统的设计,提高分辨率,以更清晰地观测到目标天体。
其次,望远镜需要具备较大的光学灵敏度,以便捕捉到微弱的光信号。
在光学系统的设计中,优化灵敏度是提高观测效果的关键。
此外,望远镜的成像质量和色差控制也是光学系统优化的重要因素。
第二节光学系统的设计原理太空望远镜的光学系统设计原理包括光路设计、光学元件选择和光学参数优化等方面。
光路设计涉及光线的传播路径和反射/折射等过程。
这要求在设计过程中,必须合理安排光学元件的位置和数量,以确保光线的传播和收集效果。
光学元件的选择则涉及到材料、曲率、直径和表面质量等参数的综合考虑。
最后,光学参数的优化是通过调整光学系统的参数来最大化望远镜的性能。
这包括调整焦距、视场、F数等参数,以达到最佳的观测效果。
第三节光学系统的优化方法光学系统的优化方法有多种途径。
首先,通过使用先进的光学设计软件,可以实现对光学系统进行精确的模拟和分析。
这些软件能够模拟光线传播、成像和色差等过程,并提供优化参数的建议。
其次,可以通过光学元件的选择和镀膜技术的改进来优化光学系统的性能。
合适的光学元件可以提高光学系统的分辨率和灵敏度,而高效的镀膜技术可以减小光学元件表面的反射和散射。
此外,光学系统的机械稳定性和准直精度也对观测效果影响较大,因此需要在设计过程中予以重视。
第四节光学系统的未来发展方向随着科学技术的不断发展,太空望远镜的光学系统也在不断演进。
未来,我们可以预见以下一些发展方向。
首先,随着光学技术的突破,激光干涉仪和自适应光学系统等新技术将应用于太空望远镜,提高其分辨率和灵敏度。
中国反射施密特式郭守敬望远镜

天文动手做/天文望远镜系列科迷街20世纪80年代前,中国几乎没有自主知识产权的大型专业天文望远镜。
改革开放以来,我国国力日渐增强,也陆续自主研制了一些1-2米级的望远镜,但与世界水平相比还有很大差距。
20世纪90年代,以王授琯院士、苏定强院士为首的科学家提出了“反射施密特式望远镜”方案。
该方案瞄准国际天文届亟待解决的大口径与大视场的矛盾,希望开辟中国自主研制大口径望远镜的发展道路。
后来,在崔向群院士带领下,中国建设者于2008年建成大口径望远镜并安装在国家天文台兴隆观测基地,成为中国首个具有完全自主知识产权、同类设备国际领先的大型光学天文仪器。
该望远镜于2010年经征集命名为“郭守敬望远镜”,2011年对外开放使用。
中国赶超世界的大口径望远镜计划中国科学院LAMOST天文望远镜◎文图 中国科学院国家天文台郭红锋. All Rights Reserved.郭守敬望远镜,全称“大天区面积、多目标、光纤、光谱天文望远镜”,英文名为“Large Sky Area Multi-Object Fibre Spectroscopic Telescope (缩写LAMOST)”。
这个名称很长,代表很多意思。
第一,它具有一次观测“大天区面积”的能力,就是说它的视场很大,是同等口径常规望远镜的5倍以上,达到20多平方度;第二,这么大的视场,适合于一次观测多个目标(设计达到4000个之多),大大提高了观测效率;第三,采用先进的光纤传输光路,保证多目标光线的精确收集和传输;第四,它观测的是天体目标的光谱信息,内含比简单测光更加丰富的天体物理数据。
可以说,这些优点都得益于郭守敬望远镜巧妙创新的光学结构设计和新技术的应用。
截至目前,它是我国最大的光学望远镜,也是世界上最大口径的大视场望远镜和光谱获取率最高的望远镜,使中国进入了世界上少数几个具备自主研制巨型望远镜能力的国家。
前面我们已经讲过,施密特望远镜光路的巧妙之处在于用一块波浪形的折射改正镜放在球面反射主镜的前面,改正球差,并使望远镜有较大的视场。
彗星发现与命名

彗星发现与命名
1682年,为了纪念英国人哈雷的伟大发现,人们将他发现的那颗彗星命名为哈雷彗星。
其实中国也有不少发现彗星并以自己的姓氏来命名的天文学家。
1965年,我国首次发现彗星,中科院紫金山天文台的天文学家使用该台口径40厘米的双筒天文望远镜发现两颗新周期彗星,分别被命名为紫金山1号彗星和紫金山2号彗星。
这是我国最早获命名的两颗彗星。
1977年,紫金山天文台又发现一颗非周期的彗星,被命名为紫金山彗星。
1988年,我国有了第一颗以中国人姓名来命名的彗星。
紫金山天文台两位天文学家葛永良和汪琦用北京天文台兴隆观测站的60厘米口径施密特望远镜发现了一颗新的周期彗星,被命名为葛-汪彗星。
1997年6月,中科院北京天文台天文学家朱进用同一架60厘米口径施密特望远镜发现一颗新天体,随后由加拿大天文学家巴拉姆观测并证实这是一颗彗星,所以该彗星被命名为朱-巴拉姆彗星,这是我国首次与外国合名的彗星。
1998年12月和1999年3月,当时在美国留学的中国天文学家李卫东用美国天文台的天文望远镜又分别发现了2颗彗星,随后均被命名为李彗星。
2002年2月1日,我国有了第一个由天文爱好者发现的彗星,
这是由中日两国天文爱好者共同发现的一颗新的长周期彗星,2月3日被命名为池谷—张彗星,这是第一颗由中国天文爱好者发现并获得命名的彗星。
施密特棱镜偏振像差矫正特性分析程序设计毕业论文
西安工业大学北方信息工程学院本科毕业设计(论文)题目:施密特棱镜偏振像差矫正特性分析程序设计系别:光电系专业:光电信息工程班级:B120108学生:学号:B12010826指导教师:2016年4月14日毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
关于大望远镜卡焦R_C系统视场改正镜设计的研究
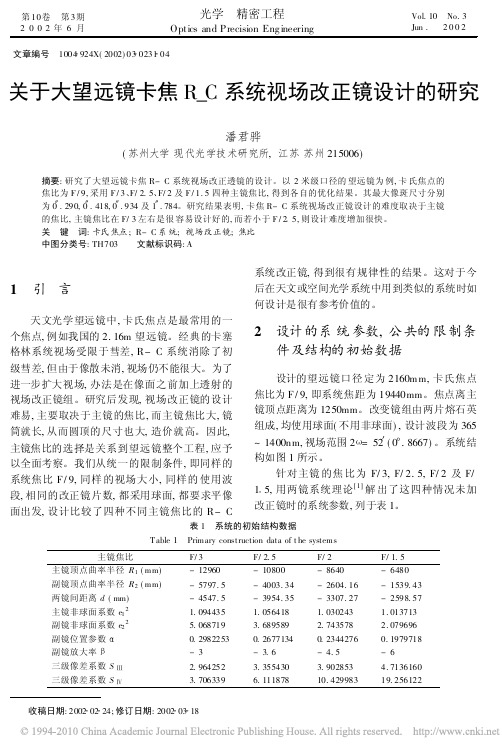
表 1 系统的初始结构数据
T able 1 Primary construction data of t he systems
主镜焦比 主镜顶点曲率半径 R1 ( mm) 副镜顶点曲率半径 R2 ( mm) 两镜间距离 d ( mm) 主镜非球面系数 e1 2 副镜非球面系数 e2 2 副镜位置参数 副镜放大率 三级像差系数 S ∀ 三级像差系数 S #
( c) 主镜焦比 F/ 2 ( c) Pr imary F/ 2
( a) 主镜焦比 F/ 3 ( a) P rimary F/ 3
( b) 主镜 焦比 F/ 2. 5 ( b) Pr imar y F/ 2. 5
( d) 主镜焦比 F/ 1. 5 ( d) Pr imary F/ 1. 5 图 2 各种焦比的像斑点列图 F ig. 2 Spot diag rams for various primary F/ # .
18 - 1598. 012
86. 2145
F/ 2 4 19 0 848. 3936
30 1147. 871 252. 1052 - 615. 3328
18 4749. 44 62. 2171
F/ 1. 5 3 47 0 767. 7021
30 1130. 619 267. 9355 - 440. 7116
级彗差, 但由于像散未消, 视场仍不能很大。为了 进一步扩大视场, 办法是在像面之前加上透射的 视场改正镜组。研究后发现, 视场改正镜的设计 难易, 主要取决于主镜的焦比, 而主镜焦比大, 镜 筒就长, 从而圆顶的尺寸也大, 造价就高。因此, 主镜焦比的选择是关系到望远镜整个工程, 应予 以全面考察。我们从统一的限制条件, 即同样的 系统焦比 F / 9, 同样 的视场大小, 同样的 使用波 段, 相同的改正镜片数, 都采用球面, 都要求平像 面出发, 设计比较了四种不同主镜焦比的 R- C
施密特-卡塞格林望远镜的设计(一)

施密特-卡塞格林望远镜的设计(一)摘要 ZEMAX光学设计程序是一个完整的光学设计软件,包括光学设计需要的所有功能,可以在实践中对所有光学系统进行设计,优化,分析,并具有容差能力,所有这些强大的功能都直观的呈现于用户界面中。
ZEMAX功能强大,速度快,灵活方便,是一个很好的综合性程序。
ZEMAX能够模拟连续和非连续成像系统及非成像系统。
关键字:光学,模拟1.Zmax软件的介绍 ZEMAX 是一套综合性的光学设计仿真软件,它将实际光学系统的设计概念、优化、分析、公差以及报表集成在一起。
ZEMAX 不只是透镜设计软件而已,更是全功能的光学设计分析软件,具有直观、功能强大、灵活、快速、容易使用等优点,与其他软件不同的是 ZEMAX 的 CAD 转档程序都是双向的,如 IGES 、 STEP 、 SAT 等格式都可转入及转出。
而且 ZEMAX可仿真 Sequential 和 Non-Sequential 的成像系统和非成像系统, ZEMAX 当前有: SE 及 EE 两种版本。
序列性( Sequential )光线追迹大多数的成像系统都可由一组的光学表面来描述,光线按照表面的顺序进行追迹。
如相机镜头、望远镜镜头、显微镜镜头等。
ZEMAX 拥有很多优点,如光线追迹速度快、可以直接优化并进行公差计算。
ZEMAX 中的光学表面可以是反射面、折射面或绕射面,也可以创建因光学薄膜造成不同穿透率的光学面特性;表面之间的介质可以是等向性的,如玻璃或空气,也可以是任意的渐变折射率分布,折射率可以是位置、波长、温度或其它特性参数的函数。
同时也支持双折射材料,其折射率是偏振态和光线角度的函数。
在 ZEMAX 中所有描述表面的特性参数包括形状、折射、反射、折射率、渐变折射率、温度系数、穿透率和绕射阶数都可以自行定义。
非序列性( Non-Sequential )光线追迹很多重要的光学系统不能用 Sequential 光线追迹的模式描述,例如复杂的棱镜、光机、照明系统、微表面反射镜、非成像系统或任意形状的对象等,此外散射和杂散光也不能用序列性分析模式。
FAST望远镜两轴转向机构结构方案优化
FAST望远镜两轴转向机构结构方案优化张新宇;李辉;杨世模【摘要】FAST馈源支撑系统承载和驱动馈源运动,进行对天体的高精度跟踪观测.在实时的定位调整中,两轴转向机构起着辅助调整接收机姿态角的作用.为满足FAST两轴转向机构的重量及刚度要求,选择了一种空间刚架式的结构构型.提出了反映结构柔顺度及重量约束的目标函数,以各类杆件的截面面积以及整个结构的高度、半径等几何参数作为优化变量,采用以无量纲的参数灵敏度为基础,通过一维搜索实现的最速下降法作为优化算法,对不同初始条件下的优化参数进行了优化设计.优化结果偏离度较小,可以认为在一定优化变量范围内达到了目标函数最优解.利用同样的方法,以各个高度控制点高度为优化参数,通过改变控制点高度沿圆环的高度分布得到一种变高度形式的结构方案,经验证变高度结构方案优于等高度结构方案.【期刊名称】《天文研究与技术-国家天文台台刊》【年(卷),期】2011(008)003【总页数】9页(P220-228)【关键词】结构优化;大射电望远镜;馈源支撑;有限元;形状优化【作者】张新宇;李辉;杨世模【作者单位】中国科学院国家天文台,北京,100012;中国科学院研究生院,北京,100049;中国科学院国家天文台,北京,100012;中国科学院国家天文台,北京,100012【正文语种】中文【中图分类】O342为满足射电天文的发展需求,同时得益于贵州独一无二的喀斯特地形,我国拟在贵州省平塘县大窝凼洼地区建设500 m口径球面射电望远镜[1](Five-hundred-meter Aperture Spherical Telescope,FAST)。
FAST立项建议书于2007年7月10日得到国家发展改革委员会批准,建成后将成为世界上最大的单天线射电望远镜,并将对我国及世界天文学的发展做出巨大贡献。
作为FAST 6个子系统之一的馈源支撑系统包括了一次索支撑、两轴转向机构和精调并联机器人(Stewart平台),望远镜的接收机安装在精调平台上[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北京天文台施密特望远镜驱动系统的改进设计Ξ周志中(中国科学院北京天文台,北京100012)摘 要 介绍了北京天文台600/900mm 施密特望远镜驱动系统的改进设计,即用2只步进电机,取代了原望远镜由4只变速箱、7只电机驱动的复杂的赤经,赤纬驱动系统,最终实现了计算机控制。
关键词:施密特望远镜;驱动系统;技术改进中图分类号:P111.23 文献标识码:A 文章编号:1001-7526(2000)03-0042-051 目 的北京天文台的施密特望远镜是60年代由东德蔡氏厂生产的赤道式望远镜,主镜口径900mm ,改正镜口径600mm ,焦距1800mm [1]。
望远镜赤经、赤纬驱动系统,采用了当时赤道式装置典型的驱动方案。
即末级采用高精度的大蜗轮副,快、慢、微动及恒动分别由各自不同的电机驱动一系列复杂的传动箱来实现的[2]。
该驱动系统经长期的运行及设计时代的局限性,使用中发现:(1)传动系统的刚度与效率较低;(2)跟踪精度较低;(3)传动链长,磨损严重,导致时滞变大,特别是赤纬方向时滞可达25s ;(4)无法实现宽广的调速;(5)结构复杂,故障率高;(6)零配件及易损件无法买到,维修困难。
上述问题已严重影响了观测工作的顺利进行;特别是近年来由于大面积CCD 成像技术的应用,对望远镜驱动与控制系统提出了更高的要求。
因此,有必要对望远镜的赤经、赤纬驱动系统进行改进,以满足现代天文观测的需求。
2 改进方案望远镜的驱动系统是望远镜的关键部位之一,一般由机械传动装置,信号装置,拖动电机及一些附属机构等组成[2]。
改进方案设计时,在保持原有驱动系统完整性(注1)的基础上,从提高望远镜的传动精度,缩短传动链,减少时滞等方面考虑,采用了2000No 13 云 南 天 文 台 台 刊Publications of Yunnan Observatory 2000年第3期Ξ收稿日期:2000-02-23;修订日期:2000-04-17作者简介:周志中,男,高级工程师,研究方向:天文仪器步进电机驱动,计算机控制的方案(图1)。
图1 新驱动系统Fig.1 New drive system2.1 赤经驱动原有望远镜的赤经驱动,是通过4只电机、2只变速箱与刹车等复杂装置,驱动末级双蜗杆机构(注2)来实现赤经的快、慢、微与恒动。
双蜗杆机构的优点是可用来消除蜗轮制造时所产生的累积误差与安装所产生的偏心误差[1,2],因此,改造时保留了这一部分。
新方案是在小蜗杆的输入轴,即双蜗杆的中间轴上,直接引入步进电机来实现赤经的驱动(图2)。
考虑到步进电机安装空间位置的大小及驱动精度等因素。
又在双蜗杆的中间轴与步进电机之间,设计了一只速比为45∶28的精密齿轮变速箱,使得电机输出轴至赤经轴的总速比:i =360×1×35/3×45/28=6750图2 赤经驱动Fig.2 Drive system of right ascension34第3期 周志中:北京天文台施密特望远镜驱动系统的改进设计 所选步进电机采用日本东方公司生产的U K599H -NBC 型及配套控制器(注3),该电机性能好,出力大,步距角为0.36°/Step ,即电机每转一圈走了n s α=360/0.36=1000Step 。
驱动精度:从图2可知,当赤经轴n α转一圈时,则电机轴转:n =n α×i =1×6750=6750(圈)电机共走n ×n s α=6750×1000=6.75×106Step ,折合到赤经轴上,则步进电机的脉冲当量[3]:△S α=360°/6.750×106=5.333°×10-5/Step =0.192″/Step即电机每走一步,赤经轴转动0.″192。
驱动力矩与驱动速度:由于步进电机的输出力矩是随着控制频率的增大而减小,而控制频率的高低又决定了步进电机速度的大小。
所以,在选择望远镜快动速度时,不能盲目的提高步进电机的控制频率,应在步进电机输出力矩允许的前提下,选择一个恰当的控制频率[3]。
根据上述原则,选取了频率f c α=1.6×104Step/s 作为步进电机的最高运行频率,这时步进电机输出力矩仍达0.35kg ・m [1]。
如赤经传动部分的总效率按50%计,则赤经轴上最终的输出力矩为:0.35×6750×50%=1181.25kg ・m快动速度:V α=f c α×△S α=1.600×104×0.192=3072″/s =51.2°/min 2.2 赤纬驱动原望远镜的赤纬驱动与赤经驱动类似,其快、慢、微动是由安放在叉臂下方的2只变速箱,3只电机,通过一根1.8m 长的万向联轴节与伞齿轮,带动末级蜗轮副实现赤纬方向的驱动。
所不同的是其末级蜗杆采用了浮动蜗杆架,用来保证末级蜗轮副之间相对位置的高精度[1,2]。
改造时去掉了传动链长,时滞大,效率低的传动变速箱、电机等复杂机构。
采用在末级蜗轮副蜗杆输入端直接耦合步进电机的方案(图3)。
考虑到安装空间位置的大小(所选电机的直径不得大于100mm ,否则将与镜筒发生碰撞),其出力还要大。
因此,选用了日本东方公司生产的U PH566HG 1—B 2型步进电机及其配套的控制器(注3)。
该电机体积小(直径为Φ60mm ,自带1∶50的减速器),步距角为0.72°/Step ,即电机每转一圈走n s δ=360/0.72=500Step驱动精度:由图3可知,电机轴至赤纬轴的速比为:i =1×360×1×50=18000当赤纬轴n δ转一圈,电机轴转:n =n δ×i =1×18000=18000(圈)相当于电机共走了n ×n s δ=18000×500=9.000×106Step 。
则步进电机的脉冲当量[3]:44 云 南 天 文 台 台 刊 2000年图3 赤纬驱动Fig.3 Drive system of declination△S δ=360°/9.000×106=4.000°×10-5/Step =0.144″/Step,赤纬轴转动0.144″。
驱动力矩与驱动速度:与赤经相似,选取频率f c δ=2.500×104Step/s 作为步进电机的最高运行频率,这时步进电机的输出力矩仍达0.55kg ・m 。
如总的传动效率按50%计,则最终赤纬轴的输出力矩为:0.55×18000×50%=4950kg ・m快动速度:V δ=f c δ×△S δ=2.500×104×0.144=3600″/s =60°/min 上述结果证明,新系统的各项性能指标明显优于改造前的系统,无论是输出力矩,还是驱动精度与速度均能满足使用要求。
3 结 论施密特望远镜赤经与赤纬驱动系统的改进,仅用2只步进电机就实现了原来由4只变速箱,7只电机驱动的复杂的赤经赤纬驱动,缩短了传动链,提高了系统刚度。
步进电机与数字调速系统配合以及计算机控制,实现了望远镜的自动指向,并得到了宽广的调速范围,宽广的驱动速率的动力范围[2,3],同时也得到了高精度的恒动与微动。
使这台故障率高、时滞大、效率低的望远镜,变成了一台自动化程度高、时滞小(赤纬时滞减少到2s )、故障率低的现代化望远镜。
目前,赤经、赤纬共有9种驱动速度,赤经快54第3期 周志中:北京天文台施密特望远镜驱动系统的改进设计 动速度最高可达51.2°/min ,赤纬可达60°/min ,跟踪精度±1″/30min [3,4]。
改进后望远镜的驱动系统,自1996年运行至今,望远镜的传动精度,跟踪精度与观测效率,均得到了显著的提高,维修保养也很方便。
由此可见,施密特望远镜赤经赤纬驱动系统的改进不仅是成功的,还为今后其它同类型望远镜的设计与改造提供了好的经验,在天文观测中所发挥的作用更是显而易见的。
注1:考虑驱动系统改进的成功性与望远镜实际使用情况,保留了原有驱动系统中需要的部分,不需要的部分只是拆去并未破坏,一旦需要仍可恢复使用。
注2:指在大蜗轮180°的位置,相对放置两根蜗杆,每根蜗杆轴上又各连接一小蜗轮,而与小蜗轮啮合的两小蜗杆,螺旋方向相反,并通过一中间轴相连接,从而形成一个差动机构。
注3:步进电机及配套的控制器由台湾中央大学提供。
参 考 文 献[1] 北京天文台档案室.北京天文台60/90cm 施密特望远镜图纸资料汇编.1996.[2] 龚祖同主编.60cm 试验天文反射望远镜专集[M ].北京:科学出版社,1980.114~161.[3] 哈尔滨工业大学.成都电机厂步进电机[M ].北京:科学出版社,19791~15;166~174.[4] 南京天文仪器研制中心.SNO1.5m 和0.9m 望远镜专集[J ].天文仪器与技术,1994,70~74.Improvement of the Dirve System of the Schmidt T elescopeat Beijing Astronomical ObservatoryZHOU Zhi -zhong(Beijing Astronomical Observatory ,The Chinese Academy of Sciences ,Beijing 100012,China )AbstractThe improved drive system of the 600/900mm Schmidt telescope of Beijing Astronomi 2cal Observatory is introduced in this paper.The Modification driving system includes two step motors replaced the old one which included four gearboxes and seven drive motors.The new drive system has higher precision and lower failure rate ,and has performed with com 2puter control.K ey w ords :Schmidt telescope ;drive system ;technology improvement64 云 南 天 文 台 台 刊 2000年。