遥测遥控实验报告4
简易红外遥控系统实验报告
简易红外遥控系统实验报告2008211208班08211106号史永涛班内序号:01指导教师:***本次课程设计在实验室度过了两周时间,但接到实验任务却是暑假前的事了,由于已经有别班同学事先做过了相同的实验,所以我在暑假期间已经询问了一些实验中的注意事项和核心内容,为开学后的实验做好了充分的准备。
本次实验可分为三个步骤:1、实验前的准备工作,画出电路图,列出自己实验中需要用到的各个芯片,并得到各芯片的管脚图和功能表,对各个芯片应有自己的一定程度的理解。
2、搭建电路,电路分为发射和接收两部分,搭建的时候应有一定的整体意识,同时应注意好细节问题,比如各模块间应隔开一定的距离,方便后期的调试,使各模块间相互独立,而搭线时应注意VCC和地线的连接,有时前期细节的不注意需要后期调试花费大量的时间去弥补。
3、电路调试与改进。
这是本次实验中的核心问题,因为实验要求中要求发射与接收的距离大于两米,而发射端和接收端的调试对于接收距离的影响十分关键,尤其是接收端,由于使用的是CX20106芯片,必须较为全面的理解了CX20106的功能,才能正确调配CX20106周围的电阻、电容的值,从而使实验最终成功。
一、实验要求1、遥控对象8个,被控制设备用LED分别代替,LED发光表示工作。
接收机与发射机的距离不小于2米。
2、8 路设备中的一路为 LED 灯,用指令遥控 LED 灯亮度,亮度分为 8 级并用数码管显示级数。
在一定的发射功率下,尽量增大接收距离。
增加信道干扰措施。
二、选择芯片74ls147、MC145026、MC145027、按键开关、拨码开关、红外发射管、红外接收管、NE555、CD4069、LED灯、7段数码管、电阻、电容、CX20106、CD4514。
三、具体电路图1、发射部分(1)调制放大首先使用74ls147进行编码,八路开关控制高低电平接入74LS147优先编码,转换成三路信号,连接MC145026的数据端(D6~D8)。
遥感应用上机实验报告
2010 12《遥感应用》实验报告1实验一 数据输入一、 实习目的掌握TM 图像数据输入的主要方法。
二、 实习内容主要包括单波段TM 图像数据输入、多波段组合文件的生成。
三、 实习过程1、单波段二进制图像数据输入1) 打开ERDAS ,在ERDAS 图标面板工具条中,点击打开输入输出对话框,如图所示。
并做如下图的选择点击OK 弹出Import Generic Binary Data 对话框,如下图所示在Data Format下拉框中选择BSQ,在Data Type下拉框中选择Unsigned 8 Bit,文件行列数的输入:在实验一TM数据中右击header.dat文件,点击用记事本打开,找到相关的行列数据,在Row中填入5733,在Cols填入6773,在Bands中选择1,然后点击Save Option,最后点击OK 执行数据输入,完成后关闭窗口。
用viewer打开转换后的band1.img文件,如图2重复上述过程,依此将七个波段的数据全部输入,完成了7个波段的输入。
2、组合波段数据:为了图像处理与分析,需要将上述转换的单波段文件组合为一个多波段图像文件。
步骤:在ERDAS图标面板工具条中,点击Interpreter--Utilities--Layer Stack打开Layer Selection and Stacking的对话框。
在input file中选择输入文件路径,将转换后的img图像文件逐一选入layer框,勾选ignore zero instats选项点击ok完成波段组合。
合成后的图像如图所示。
3四、实验小结:在此次实验的过程中遇到了很多问题,由于是初次接触遥感图像处理的软件,刚开始软件的安装就出现了很多问题,没有认真的阅读实验安装过程,造成软件证书无效,不能正常运行。
在今后的学习过程中要更加踏实,努力按照老师的要求去做,做实验的时候多思考,勤尝试。
实验二遥感图像几何纠正一、实验目的掌握遥感图像的纠正过程二、实验内容根据实验的数据,对两张图片进行几何纠正4三、 实验流程显示图像模型→调用几何纠正模型→启动控制点工具→采集地面控制点和地面检查点→计算变换参数→灰度重采样→纠正精度评定四、 实验步骤1、在开始---程序菜单中打开ERDAS ,点击Viewer 菜单,则出现了Viewer2。
四遥实验报告

遥测(遥测信息):远程测量。
采集并传送运行参数,包括各种电气量(线路上的电压、电流、功率等量值)和负荷潮流等。
遥信(遥信信息):远程信号。
采集并传送各种保护和开关量信息。
遥控(遥控信息):远程控制。
接受并执行遥控命令,主要是分合闸,对远程的一些开关控制设备进行远程控制。
遥调(遥调信息):远程调节。
接受并执行遥调命令,对远程的控制量设备进行远程调试,如调节发电机输出功率。
放射功能:遥测(遥测信息):远程测量。
采集并传送运行参数,包括各种电气量(线路上的电压、电流、功率等量值)和负荷潮流等。
遥信(遥信信息):远程信号。
采集并传送各种保护和开关量信息。
遥控(遥控信息):远程控制。
接受并执行遥控命令,主要是分合闸,对远程的一些开关控制设备进行远程控制。
遥调(遥调信息):远程调节。
接受并执行遥调命令,对远程的控制量设备进行远程调试,如调节发电机输出功率。
// 远动终端(RTU)与主站配合可以实现四遥功能:1)遥测:采集并传送电力系统运行的实时参数2)遥信:采集并传送电力系统中继电保护的动作信息、断路器的状态信息等3)遥控:从调度中心发出改变运行设备状况的命令4)遥调:从调度中心发出命令实现远方调整发电厂或变电站的运行参数// 含义作用遥信遥测遥控遥调四大概念介绍关于四遥功能即遥信( YX) , 遥测( YC) , 遥控( YK) 和遥调( YT) 的概念四遥功能:四遥功能即遥信( YX) , 遥测( YC) , 遥控( YK) 和遥调( YT) .遥信:要求采用无源接点方式,即某一路遥信量的输入应是一对继电器的触点,或者是闭合,或者是断开。
通过遥信端子板将继电器触点的闭合或断开转换成为低电平或高电平信号送入RTU 的YX 模块。
遥信功能通常用于测量下列信号,开关的位置信号、变压器内部故障综合信号、保护装置的动作信号、通信设备运行状况信号、调压变压器抽头位置信号。
自动调节装置的运行状态信号和其它可提供继电器方式输出的信号;事故总信号及装置主电源停电信号等。
实验一 遥控与遥测实验原理
二、超短波数据传输
• 工作频率为30~300MHz(波长为10~1米,也称 为米波)的无线电通信设备。严格地说,凡在此波 段内工作的接力机、散射机和流星余迹通信设备 等,也属于超短波电台。但通常指的是以地波或 空间波视距传输的步谈机、便携式、车载(或机载、 舰载)式电台。它主要由收发信机、天线和电源等 部分组成。超短波电台可采用调幅、调频、单边 带等调制制度,通常以调频制为主,其抗干扰性 能优于调幅制和单边带制
余 氯 传 感 器
排 水 管
配水干管 水厂蓄水池的浊度监测站 管网末梢的余氯监测站
五、WiFi WiFi(Wireless Fidelity,Wi-Fi): •标准: 802.11b •频段:2.4G •带宽:11M •距离:75米
六、Bluetooth • 标准:IEEE802.15.1 • 频段:2.4G • 带宽:1.3M(V1.2) • 距离:100米(CLASS1),10米 (CLASS2)
1.GSM/GPRS/CDMA网络 ⑴GSM网络
无人值守数据采集站
智能传感器1 Internet 敏 感 元 件 信 号 调 理 A/D 转 换 微 处 理 器
RS-485/RS-422
GSM短信息中心
GSM收发器
智能传感器N
敏 感 元 件
信 号 调 理
A/D 转 换
微 处 理 器
GSM收发器
GSM收发器
RS-485/RS-422总线电气特性 工作模式 允许的收发器数目 最大电缆长度 最高数据速率 最小驱动输出电压范围 最大驱动输出电压范围 最大输出短路电流 最大输入电流 驱动器输出阻抗 输入端电容 差分传输(平衡传输) 32(受芯片驱动能力限制) 4000英尺(1219米) 10Mbps ±1.5V ±5V 250mA 1.0mA/12Vin~0.8mA/-7Vin 54欧 ≤50pF
电力系统自动化-实验三 遥控、遥测、遥信、遥调四遥实验
实验三遥控、遥测、遥信、遥调四遥实验1.本次实验的目的和要求1)、熟悉远动技术在电力系统中的应用。
2)、理解遥控、遥测、遥信、遥调的具体意义,及实现方法。
2.实践内容或原理早期的电力系统调度,主要依靠调度中心和各厂站之间的联系电话,这种调度手段,信息传递的速度慢,且调度员对信息的汇总、分析、费时、费工,它与电力系统中正常工作的快速性和出现故障的瞬时性相比,调度实时性差。
电力系统采用远动技术后,厂站端的远动装置实时地向调度中心的装置传送遥测和遥信信息,这些信息能直观地显示在调度中心的屏幕显示器上和调度模拟屏上,使调度员随时看到系统的实时运行参数和系统运行方式,实现对系统运行状态的有效监视。
在需要的时候,调度员可以在调度中心操作,完成向厂站中的装置传送遥控或遥调命令。
由于远动装置中信息的生成,传输和处理速度非常快,适应了电力系统对调度工作的实时性要求,使电力系统的调度管理工作进入了自动化阶段。
调度自动化系统中的远动系统由远动主站、远方终端RTU和通道组成。
远动终端(RTU)与主站配合可以实现四遥功能:1)遥测:采集并传送电力系统运行的实时参数2)遥信:采集并传送电力系统中继电保护的动作信息、断路器的状态信息等3)遥控:从调度中心发出改变运行设备状况的命令4)遥调:从调度中心发出命令实现远方调整发电厂或变电站的运行参数本实验平台上,可完成的四遥功能见表6。
1)、遥信、遥测与电力系统远程监视电力系统的遥信遥测是由安装在发电厂和变电站的远动终端(RTU)负责采集电力系统运行的实时参数,并借助远动信道将其传送到调度中心的。
电力系统运行的实时参数有:发电机出力,母线电压,线路有功和无功负荷,断路器的状态信息等。
在本实验中,RTU的信息采集功能由微机励磁调节器、微机调速器和智能电力监测仪承担远动信道用有线通信信道来模拟,通信方式采用问答式(Polling)方式,调度中心的计算机负责管理调度自动化功能。
采用面向对象的人机交互界面,通过鼠标点击查询远方厂站实时参数并自动检测和报告断路器变位和模拟量越限。
遥感原理与应用实验报告
遥感原理与应⽤实验报告《遥感原理与应⽤》课程Remote Sensing Principle and Application实验报告适⽤专业:遥感科学与技术、测绘⼯程、地理信息系统学期:2016-2017(1)专业班级:测绘⼯程13-4班学⽣姓名:盼学号: 20137018指导教师:⽥静⿊龙江⼯程学院·测绘⼯程学院2016年10⽉⽬录实验⼀ENVI软件安装与基本功能操作 (2)实验⼆影像的地理坐标定位和校正 (18)实验三图像融合、镶嵌、裁减 (28)实验四遥感图像分类 (35)实验项⽬实验⼀ENVI软件安装与基本功能操作实验⽇期2016年10⽉19⽇实验地点实验楼612同组⼈数1⼈实验类型□传统实验现代实验□其他□验证性综合性□设计性□其他⾃⽴式□合作式□研究式□其他⼀、实验⽬的熟悉遥感数据图像处理软件ENVI的安装过程,了解ENVI基本信息、基本概念及其主要特性。
对ENVI操作界⾯有⼀个基本的熟悉,对各菜单功能有⼀个初步了解,为后⾯的实验作好准备。
⼆、实验仪器设备1.硬件环境:计算机⼀台;2.软件环境:WindowsXP操作系统、ENVI4.7软件等。
三、实验原理、内容及步骤实验原理、内容:(1)遥感图像处理软件ENVI界⾯总体介绍;(2)ENVI软件能识别的图像类型介绍;(3)各种图像⽂件的打开。
实验步骤:1. ENVI的安装。
2. 遥感图像处理软件ENVI界⾯介绍。
启动ENVI后,出现主菜单条,⼀共12项:File:⽂件操作。
⽀持众多的卫星和航空传感器。
⽀持80多种图像以及⽮量数据格式的输⼊,⽀持多种格式图像⽂件的直接输⼊。
可输出的格式包括:栅格格式和⽮量格式。
Basic Tools:基本图像⼯具。
提供了多种ENVI功能的⼊⼝。
这些功能对于处理各种数据类型都是很有⽤的。
主要包括数据的调整、图像统计/分析、变化检测、波段运算、图像分割、图像掩膜。
Classification:图像分类⼯具。
遥感实习报告 小实验
实验一、典型地物的光谱反射特征一、实验目的熟悉ENVI软件提供的各种光谱库,针对五种典型地物:雪、植被、水体、土壤、矿物岩石,通过绘制地物的反射光谱特性曲线,说明典型地物的反射光谱特性,并分别比较属于同一大类但处于在不同状态下的地物反射光谱特性。
二、实验数据与原理数据:ENVI自带的波谱库。
原理:入射到物体表面的电磁波与物体发生三中作用:反射、吸收和投射。
不同地物的反射、投射和吸收能力不同,既地物的波普特性。
遥感传感器能够记录地物本身发射的电磁波信息和地物反射太阳光的电磁波信息。
三、实验过程与结果启动ENVI软件,拷贝实验所需原始数据并修改文件名。
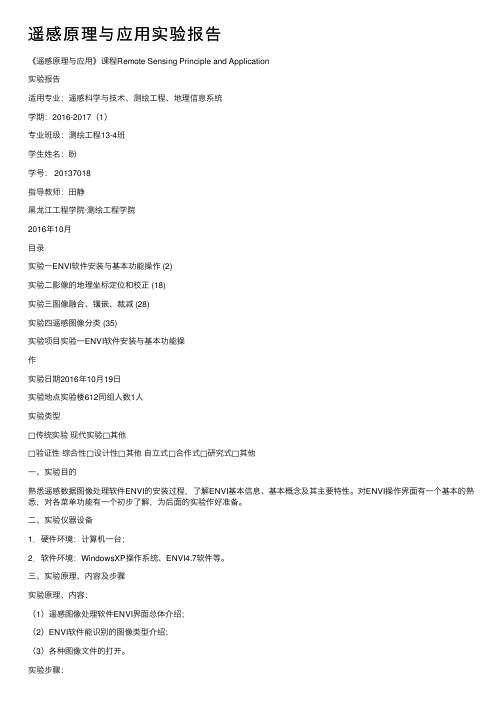
在主菜单中打开Spectral--->Spectral Libraries--->Spectral Library Viewer;打开Spectral Library Input File对话框,点击open--->new file;打开原始文件夹,然后分别选择雪、植被、水体、土壤、矿物岩石的波普图文件,得到五种物质在不同状态下的波普曲线图图1为雪在五种不同状态下的波普图,观察图可得,不同状态的雪在波长0.5微米附近有个波峰,随着波长增加反射率逐渐降低,在可见光波段基本上是非选择性吸收体,既高反射体,但在近红外波段吸收很强。
图2为三种植物的波普反射曲线,三种植物分别为confier(针叶树)、decidous(落叶植物)、grass(草)。
观察图可看出在可见光波段0.55微米(绿光)附近的反射率较低,10%~20%左右,两侧0.45微米(蓝光)和0.67微米(红光)则有两个吸收带。
在近红外波段1.2~1.5微米件有一个反射的陡坡,至1.6微米附近有一峰值在2~3微米件吸收率大增,反射率大大下降图(3)绘出了纯净水、海水的波普曲线,观察图可得出水在波长1微米左右的反射率较高,近红外波段的反射率很低。
四、实验体会不同的地物一般有不同的反射率,根据此原理可以区分不同的地物。
遥测实验内容

实验3 MDS2710电台通信实验实验一、实验目的(1)了解WINDOWS超级终端的使用方法;(2)了解串口调试助手的使用方法;(3)掌握MDS2710 数字电台的应用方法。
二、实验设备及仪器(1)MDS2710 数字电台(一套);(2)计算机(二台);(3)实验软件。
三、实验原理与说明(1)MDS2710数字电台介绍MDS数字电台的性能价格比在常规电台中独占鳌头,覆盖频率为220-240MHz他的数据吞吐量大,传输距离远,全透明异步实时传输,使用标准的异步通讯协议,无需特别设置及编程,并提供一路通用的数字输出。
MDS数字电台可在现场设置为主站或子站,可以半双工或单工运行。
支持各种收发频率间隔,主站电台可以做网管。
单工运行模式允许所有电台之间的通信。
本产品使用于UL标准一级二类,A、B、C、D各种恶劣危险的环境使用。
电台性能优异,数据可靠,坚固耐用。
采用了DSP技术,自适应均衡,前向纠错技术,速率达到19200bps。
电台安装简便易行。
无线系统的安装实施快,投资见效快。
电台无须特别编程设置,任何常见异步通信协议都可以使用。
电台在最恶劣的环境下使用,电台设计出色,在干扰严重,传输路径阻挡的环境下表现优异。
网管软件:InSite网管软件简化了维护的工作,减少了管理费用,可在不中断数据传输的情况下,监测维护电台网络性能优异:DSP电台,信道编码,前向纠错,相干解调;设置灵活:可设置为主站或子站,软件设置频率;兼容性好:与过去的MDS2000系列,MDS4000系列产品后向兼容电台应用:石油天然气生产,调配输送;自来水,废水,煤气工程;电力调度,配网自动化,负荷控制;GPS定位系统;移动数据传输;铁路通信系统,交通控制系统;工业自动化过程控制;彩票系统技术参数:工作频点:220-240MHz ;运行方式: 异步,单工,半双工;数据端口: RS-232 。
发射机:频率稳定性:+/-1.5ppm ;载波功率:0.1 至5 瓦可调;载波功率精度:+/- 1.5 dB ;占空率:100%,连续;输出阻抗:50欧姆接收机:类型——双超外差式;频率稳定性——+/-1.5 ppm ;邻道选择——60 dB电源:供电——13.8Vdc (10.5 至16 Vdc范围) ;发射电流——最大2 安培,(发射功率5W 时);接收电流——< 125 毫安;休眠状态——15 毫安调制解调器:调制类型——数字/ CPFSK;CTS时延——0-255毫秒可调;1毫秒为步进;PTT时研——0-255毫秒可调,1毫秒为步进。
红外遥感实验报告

红外遥感实验报告一、实验目的本实验旨在通过红外遥感技术,实现对地面目标的探测和识别,探究红外遥感在军事、环境监测、地质勘探等领域的应用潜力,提高学生对红外遥感技术的理解和实践能力。
二、实验原理红外遥感是利用红外辐射信息来获取地物或目标参数的技术手段。
地面目标在太阳照射下吸收热量,再以辐射方式向四周散发出去,散发的热量包括可见光和红外光。
而地球大气层对红外辐射有较高的透过率,因此可以通过红外探测器接收地面目标散发的红外辐射,实现对地面目标的探测和识别。
三、实验步骤1. 准备红外遥感仪器和设备,包括红外探测器、计算机、遥感软件等;2. 在实验区域内设置不同的地面目标,如建筑物、绿化植被、水体等;3. 使用红外探测器对各地面目标进行红外遥感图像获取;4. 利用遥感软件进行图像处理和分析,获取地面目标的红外辐射信息;5. 对比不同地面目标的红外图像,分析地面目标的特征和识别方法。
四、实验结果与分析通过实验,我们成功获取了不同地面目标的红外遥感图像,并进行了分析。
从实验结果中我们可以看出,建筑物、绿化植被和水体在红外图像中呈现出不同的特征和亮度。
建筑物在红外图像中通常表现为高亮度区域,绿化植被则显示较暗的颜色,而水体则呈现出较为平滑的特征。
通过对红外图像的比对和分析,我们可以实现对不同地面目标的识别和分类。
红外遥感技术在城市规划、农业监测、环境保护等领域有着广泛的应用前景,为促进社会发展和科学研究提供了重要支持。
五、实验总结本次红外遥感实验使我们深入了解了红外遥感技术的原理和应用,提高了我们对遥感技术的认识和实践能力。
通过实验,我们不仅学到了红外遥感技术的基本知识,还理解了红外图像处理和分析的方法,为今后的科研工作和学习提供了重要的支持和指导。
通过实验,我们对红外遥感技术有了更深入的了解,为今后在遥感技术领域的学习和研究打下了良好的基础。
希望通过本次实验,能够进一步拓展红外遥感技术的应用领域,为未来的科学研究和社会发展做出更大的贡献。
遥控遥测 实验

实验一闪烁指示器一、功能介绍:闪烁指示器白天自动熄灭,天黑以后自动闪烁,可以为楼梯或走廊内电灯开关位置的指示器,也可以作为灯塔模型中的自动闪烁导航灯。
优点:方便实用,成本低。
二、电路原理闪烁指示器电路如图所示:电路工作原理电路采用四与非门集成电路CD4011的其中两个与非门,组成可控多谐振荡器,用一只发光二极管(VD)作为闪烁指示灯,以光敏电阻RG为光控器件,整个电路结构比较简单。
在白天时,光敏电阻RG受到自然光线的照射(不必阳光直射),其阻值接近亮阻(≤2K),要比预期串联的电阻阻值小的多,因此与非门G1的○1脚输入电压≤0.1V为低电平,与非门G1关闭,即G1输出○3始终为高电平。
G2的○6,○5脚也是高电平,于是G2的输出始终为低电平。
振荡器停止振荡,VD不发光。
天黑时,光敏电阻RG只受到极其微弱的光线照射,此时它的阻值接近暗阻(≥600K~2M),要比与其串联的电阻阻值大很多,所以与非门G1的○1脚输入电压≥5V,为高电平,这时G1的输出状态就取决于○2脚的状态了。
设刚开始时○4脚为低电平,则这时○3,○6,○5脚均为高电平了,○2脚为低电平。
○3脚高电平经R1,C1,○4脚对C1充电,使C1两端电压升高,同时通过R2使○2脚电压也升高。
当C1的○2脚电平超过门限电平时,○2脚改变为高电平,于是○1,○2脚改变均为高电平。
则经过G2门输出端○3脚为低电平。
此时○6,○5脚也为低电平,于是经G2门输出端○4脚为高电平。
○4脚高电平通过R1和C1的输出端○3脚使C1放电,从而C1两端电压下降,即○2脚电压也下降。
当○2脚电压下降至门限电压以下时,○2脚重新恢复成低电平,于是○2脚为低电平,○3脚为高电平,○6脚和○5脚也为高电平,○4脚为低电平,从而又开始了往复循环的过程,形成振荡。
如果振荡频率足够低,则发光二级管将闪闪发光。
电阻R4对通过VD的电流期限制作用,可以针对不同的VD发光亮度作适当调整。
红外遥控测试实验报告(3篇)

第1篇一、实验目的1. 了解红外遥控的基本原理和组成。
2. 掌握红外遥控信号的发射和接收技术。
3. 评估红外遥控系统的性能,包括遥控距离、角度和抗干扰能力。
4. 分析实验过程中遇到的问题,并提出相应的解决方案。
二、实验原理红外遥控技术是一种无线通信技术,通过发射端发送红外信号,接收端接收并解析红外信号,从而实现对设备的控制。
红外遥控系统主要由发射端、传输介质和接收端组成。
三、实验器材1. 红外遥控器2. 红外接收模块3. 逻辑分析仪4. 万用表5. 电源6. 调试工具四、实验步骤1. 搭建实验平台:将红外遥控器和红外接收模块连接到逻辑分析仪,并将逻辑分析仪与电脑连接,以便实时观察和分析信号。
2. 测试遥控距离:在实验室内,保持红外遥控器和红外接收模块之间距离不变,逐步增加距离,记录不同距离下的遥控效果。
3. 测试遥控角度:在实验室内,保持红外遥控器和红外接收模块之间距离不变,改变红外遥控器与红外接收模块之间的角度,记录不同角度下的遥控效果。
4. 测试抗干扰能力:在实验室内,向红外遥控器和红外接收模块之间添加干扰信号,观察红外遥控系统的抗干扰能力。
五、实验结果与分析1. 遥控距离测试:在实验过程中,当红外遥控器和红外接收模块之间距离为5米时,遥控效果良好;当距离增加到10米时,遥控效果有所下降;当距离增加到15米时,遥控效果基本失效。
这表明红外遥控系统的遥控距离与发射端和接收端之间的距离有关,距离越远,遥控效果越差。
2. 遥控角度测试:在实验过程中,当红外遥控器和红外接收模块之间距离为5米时,在正前方角度范围内,遥控效果良好;当角度增加到45度时,遥控效果有所下降;当角度增加到90度时,遥控效果基本失效。
这表明红外遥控系统的遥控角度与发射端和接收端之间的角度有关,角度越大,遥控效果越差。
3. 抗干扰能力测试:在实验过程中,向红外遥控器和红外接收模块之间添加干扰信号,发现当干扰信号强度较高时,红外遥控系统的抗干扰能力较差,容易导致遥控失效。
《遥感技术》实验报告
郑州大学水利与环境学院遥感技术实验报告(适用于地理信息系统专业)专业班级: ***********学生姓名: *******学生学号: ***********指导教师: ******实验成绩:***年***月实验一、遥感图像认知与输入/输出的基本操作一、实验要求1.了解遥感卫星数字影像的差异。
2.掌握查看遥感影像相关信息的基本方法。
3.掌握遥感图像处理软件ERDAS的基本视窗操作及各个图标面板的功能。
4.了解遥感图像的格式,学习将不同格式的遥感图像转换为ERDASimg格式,以及将ERDASimg 格式转换为多种指定的格式图像。
5.学习如何输入单波段数据以及如何将多波段遥感图像进行波段组合。
6.掌握在ERDAS系统中显示单波段和多波段遥感图像的方法。
二、实验内容1.遥感图像文件的信息查询。
2.空间分辨率。
3.遥感影像纹理结构认知。
4.色调信息认知。
5.遥感影像特征空间分析。
6.矢量化。
7.遥感图像的格式。
8.数据输入/输出。
9.波段组合。
10.遥感图像显示。
三、实验结果及分析:简述矢量功能在ERDAS中的意义。
矢量功能可以将栅格数据转化为矢量数据。
矢量数据有很多优点:1.矢量数据由简单的几何图元组成,表示紧凑,所占存储空间小。
2.矢量图像易于进行编辑。
3.用矢量表示的对象易于缩放或压缩,且不会降低其在计算机中的显示质量。
四、实验结果及分析:简述不同传感器的卫星影像的特点和目视效果。
SPOT卫星最大的优势是最高空间分辨率达10m,并且SPOT卫星的传感器带有可以定向的发射镜,使仪器具有偏离天底点(倾斜)观察的能力,可获得垂直和倾斜的图像。
因而其重复观察能力由26天提高到1~5天,并在不同的轨道扫面重叠产生立体像对,可以提供立体观测地面、描绘等高线,进行立体绘图的和立体显示的可能性。
CBRES的轨道是太阳同步近极地轨道,轨道高度是778km,卫星的重访周期是26天,其携带的传感器的最高空间分辨率是19.5m。
北京航空航天大学遥感技术实验报告
北京航空航天大学遥感技术基础实验院校:宇航学院专业:探测制导与控制技术学号:姓名:任课老师:尹继豪2012年10月22日目录一、实验结果 (3)1、累加求和后的光谱曲线 (3)2、各累加光谱曲线的反射率 (7)二、实验分析 (10)三、实验感想 (10)一、实验结果1、累加求和之后的光谱曲线大理石草地树叶鹅卵石花参考板2、各累加光谱曲线的反射率大理石草地树叶鹅卵石二、实验分析通过实验观察和分析,我们可以得到地物的反射光谱有如下特征:(1)从大理石、树叶、草地、鹅卵石、花的反射率可以看出,不同的地物在不同波段反射率存在差异,这样可以用于鉴别各个物种,目标识别。
(2)相同地物光谱曲线有相似性,但是也存在差异性(如大理石与鹅卵石的光谱曲线)虽然草地和枫叶的光谱放射率曲线非常相似但仔细观察也略有不同,这说明利用光谱反射率的知识不仅可以区分物体类别,还具有识别的功能,只要有足够的信息作为支持,就有可能通过光谱放射率的不同得到所拍摄地物的具体类别。
比如具体是由什么树种构成的树林等等。
(3)地物光谱特征具有事件性和空间性(不同时间与空间光谱特征不同)。
(4)不同地物对于光波的吸收程度不同,因此高光谱可以用在材料领域,通过实验可以找出吸收特定频率光波的材料。
三、实验感想本次实验是我们的第一次遥感实验,了解了很多有关地物光谱仪的知识,了解了地物光谱仪的操作,以及地物光谱仪所得数据到底是个什么样子。
虽然只是演示实验,没能够亲自动手操作。
但对于地物光谱仪已经有了一个大致的了解。
明白了其作用。
通过对实验数据的分析,知道了高光谱遥感所能获取的信息量是十分丰富的,这使得通过高光谱遥感可以得到地物的类别信息,从而对地物进行分类。
这样在一些一般遥感手段无法解决问题的领域,诸如寻找矿藏等,高光谱遥感就会大有作为。
电力系统自动化-实验三 遥控、遥测、遥信、遥调四遥实验
实验三遥控、遥测、遥信、遥调四遥实验1.本次实验的目的和要求1)、熟悉远动技术在电力系统中的应用。
2)、理解遥控、遥测、遥信、遥调的具体意义,及实现方法。
2.实践内容或原理早期的电力系统调度,主要依靠调度中心和各厂站之间的联系电话,这种调度手段,信息传递的速度慢,且调度员对信息的汇总、分析、费时、费工,它与电力系统中正常工作的快速性和出现故障的瞬时性相比,调度实时性差。
电力系统采用远动技术后,厂站端的远动装置实时地向调度中心的装置传送遥测和遥信信息,这些信息能直观地显示在调度中心的屏幕显示器上和调度模拟屏上,使调度员随时看到系统的实时运行参数和系统运行方式,实现对系统运行状态的有效监视。
在需要的时候,调度员可以在调度中心操作,完成向厂站中的装置传送遥控或遥调命令。
由于远动装置中信息的生成,传输和处理速度非常快,适应了电力系统对调度工作的实时性要求,使电力系统的调度管理工作进入了自动化阶段。
调度自动化系统中的远动系统由远动主站、远方终端RTU和通道组成。
远动终端(RTU)与主站配合可以实现四遥功能:1)遥测:采集并传送电力系统运行的实时参数2)遥信:采集并传送电力系统中继电保护的动作信息、断路器的状态信息等3)遥控:从调度中心发出改变运行设备状况的命令4)遥调:从调度中心发出命令实现远方调整发电厂或变电站的运行参数本实验平台上,可完成的四遥功能见表6。
1)、遥信、遥测与电力系统远程监视电力系统的遥信遥测是由安装在发电厂和变电站的远动终端(RTU)负责采集电力系统运行的实时参数,并借助远动信道将其传送到调度中心的。
电力系统运行的实时参数有:发电机出力,母线电压,线路有功和无功负荷,断路器的状态信息等。
在本实验中,RTU的信息采集功能由微机励磁调节器、微机调速器和智能电力监测仪承担远动信道用有线通信信道来模拟,通信方式采用问答式(Polling)方式,调度中心的计算机负责管理调度自动化功能。
采用面向对象的人机交互界面,通过鼠标点击查询远方厂站实时参数并自动检测和报告断路器变位和模拟量越限。
遥控小车实验报告

一、实验目的1. 了解遥控小车的构造和工作原理。
2. 掌握遥控小车的基本操作方法。
3. 通过实验,提高动手能力和创新意识。
二、实验原理遥控小车是一种利用无线电波进行遥控的玩具,主要由电源、电机、遥控器、接收器、驱动电路等组成。
当遥控器发出指令时,接收器接收指令,通过驱动电路控制电机转动,从而实现小车的行走、转向等功能。
三、实验器材1. 遥控小车1台2. 电源1块3. 遥控器1个4. 万用表1个5. 钳子、螺丝刀等工具四、实验步骤1. 检查遥控小车各部件是否完好,包括电源、电机、遥控器、接收器等。
2. 连接电源,打开遥控器,确保遥控器与接收器通信正常。
3. 检查电机转动是否顺畅,有无异常噪音。
4. 学习遥控器的基本操作,包括前进、后退、转向等。
5. 进行遥控小车的基本操作实验,观察小车运行状态,分析问题。
6. 对遥控小车进行改装,提高其性能。
五、实验内容1. 遥控小车的基本操作(1)打开电源,确保遥控器与接收器通信正常。
(2)使用遥控器控制小车前进、后退、转向等。
(3)观察小车运行状态,确保小车在操作过程中稳定、可靠。
2. 遥控小车改装实验(1)改装小车底盘,提高小车通过性。
(2)更换高性能电机,提高小车速度。
(3)增加电池容量,延长小车续航时间。
(4)优化遥控器接收范围,提高遥控距离。
六、实验结果与分析1. 实验结果通过实验,我们掌握了遥控小车的基本操作方法,了解了遥控小车的构造和工作原理。
在改装实验中,我们对小车进行了以下改进:(1)更换高性能电机,提高小车速度。
(2)增加电池容量,延长小车续航时间。
(3)优化遥控器接收范围,提高遥控距离。
2. 实验分析(1)遥控小车的基本操作实验结果表明,小车在操作过程中稳定、可靠,达到了预期效果。
(2)通过改装实验,我们对遥控小车进行了优化,提高了其性能,使其在实际应用中更加出色。
七、实验总结1. 通过本次实验,我们了解了遥控小车的构造和工作原理,掌握了遥控小车的基本操作方法。
四路红外遥控装置实训报告

四路红外遥控装置一、设计要求:具备发射装置和接受装置。
本接受装置有4路信号输出,每路输出可以独立控制一个用电设备的通、断两种状态,实验中以LED灯模拟受控对象,在发射装置中,设有4各按钮开关,分别用于操纵接受装置中的4个受控对象。
二、设计方案及分析:方案一利用PT2262和PT2272设计电路PT2262/2272是一对带地址、数据编码功能的红外遥控发射/接收芯片。
其中发射芯片PT2262-IR将载波振荡器、编码器和发射单元集成于一身,使发射电路变得非常简洁。
接收芯片PT2272的数据输出位根据其后缀不同而不同,数据输出具有“暂存”和“锁存”两种方式,方便用户使用。
后缀为“M”为“暂存型”,后缀为“L”为“锁存型”,其数据输出又分为0、2、4、6不同的输出,例如:PT2272-M4则表示数据输出为4位的暂存型红外遥控接收芯片。
PT2262/PT2272工作原理:PT2262-IR发射芯片地址编码输入有“1”、“0”和“开路”三种状态,数据输入有“1”和“0”两种状态。
由各地址、数据的不同接脚状态决定,编码从输出端Dout输出,通过红外发射管发射出去。
其编码时序波形如图2所示。
Dout输出的编码信号是调制在38kHz载波上的,OSC1、OSC2外接的电阻决定载频频率,一般电阻可在430k—470k之间选择即可。
PT2272的暂存功能是指当发射信号消失时,PT2272的对应数据输出位即变为低电平。
而锁存功能是指,当发射信号消失时,PT2272的数据输出端仍保持原来的状态,直到下次接收到新的信号输入。
图3是红外发射和接收的典型应用原理图,为了能正确解调出调制的编码信号,接收端需加一级前置放大级,保证输入PT2272的信号幅度足够大。
PT2272各输出端通过各种接口即可控制相应的负载。
方案二利用VD5026和VD5027设计电路VD5026,VD5027是CMOS大规模数字集成电路(见图1)。
前者是编码器,后者是译码器。
遥感综合性实验报告
本科学生综合性实验报告姓名学号专业_城规11 班级城规11 _实验课程名称遥感原理与运用实验名称遥感综合性实验指导教师及职称付磊开课学期2012 _至_2013 _学年_下学期云南师范大学旅游与地理科学学院编印一、实验准备实验名称:遥感课程综合性实验实验时间:2013.6实验类型:□验证实验□综合实验□设计实验1、实验目的和要求:①数据输入和输出:通过数据的输出和输入联系,掌握卫星遥感数据的存储方式;二进制图像数据输入、单波段数据组合成多波段数据;HDF图像数据的输入输出;输出JPG图像数据。
②遥感图像的几何校正:学习掌握遥感数据的几何校正的原理方法以及几何校正的意义。
遥感影像相对于地图投影坐标系统进行配准校正,即要找到遥感影像与地图投影坐标系统之间的数学函数关系,通过这种函数关系可计算出原遥感影像中每个像元在地图投影坐标系统上的位置从而得到校正后的图像。
③遥感图像剪裁处理和遥感图像镶嵌处理:通过上机操作,了解图像镶嵌的方法及基本处理过程,学会镶嵌是色彩平衡处理方法,学会使用规则剪裁、不规则剪裁及利用行政区剪裁遥感影像的方法。
④遥感图像投影变换:将图形文件从一种地图投影类型变为另一种地图投影类型,同时可以进行单幅图的投影变换又可以进行多附图的投影变换。
⑥图像解译辐射增强处理:其中包含查找表拉伸、直方图均衡化、直方图匹配、亮度反转处理、去霾处理、降噪处理、去条带处理。
查找表拉伸是遥感图像对比度拉伸的总和,通过修改图像查找表使输出的图像值发生变化。
直方图均衡化对图像进行非线性拉伸,重新分配图像像元值,使一定灰度范围内像元的数量大致相当,从而原来直方图输出后变为一个较平的分段直方图。
直方图匹配对图像查找进行数学变换,使一幅图像某个波段得直方图与另一幅图像对应波段类似。
亮度反转处理对图像亮度范围进行线性或非线性取反,产生一副与输入亮度相反的图像,原来亮的地方变暗,暗的地方变亮。
去霾处理目的是降低多波段图像或全色图像的模糊度。
四遥实验报告
遥测(遥测信息):远程测量。
采集并传送运行参数,包括各种电气量(线路上的电压、电流、功率等量值)和负荷潮流等。
遥信(遥信信息):远程信号。
采集并传送各种保护和开关量信息。
遥控(遥控信息):远程控制。
接受并执行遥控命令,主要是分合闸,对远程的一些开关控制设备进行远程控制。
遥调(遥调信息):远程调节。
接受并执行遥调命令,对远程的控制量设备进行远程调试,如调节发电机输出功率。
放射功能:遥测(遥测信息):远程测量。
采集并传送运行参数,包括各种电气量(线路上的电压、电流、功率等量值)和负荷潮流等。
遥信(遥信信息):远程信号。
采集并传送各种保护和开关量信息。
遥控(遥控信息):远程控制。
接受并执行遥控命令,主要是分合闸,对远程的一些开关控制设备进行远程控制。
遥调(遥调信息):远程调节。
接受并执行遥调命令,对远程的控制量设备进行远程调试,如调节发电机输出功率。
// 远动终端(RTU)与主站配合可以实现四遥功能:1)遥测:采集并传送电力系统运行的实时参数2)遥信:采集并传送电力系统中继电保护的动作信息、断路器的状态信息等3)遥控:从调度中心发出改变运行设备状况的命令4)遥调:从调度中心发出命令实现远方调整发电厂或变电站的运行参数// 含义作用遥信遥测遥控遥调四大概念介绍关于四遥功能即遥信( YX) , 遥测( YC) , 遥控( YK) 和遥调( YT) 的概念四遥功能:四遥功能即遥信( YX) , 遥测( YC) , 遥控( YK) 和遥调( YT) .遥信:要求采用无源接点方式,即某一路遥信量的输入应是一对继电器的触点,或者是闭合,或者是断开。
通过遥信端子板将继电器触点的闭合或断开转换成为低电平或高电平信号送入RTU 的YX 模块。
遥信功能通常用于测量下列信号,开关的位置信号、变压器内部故障综合信号、保护装置的动作信号、通信设备运行状况信号、调压变压器抽头位置信号。
自动调节装置的运行状态信号和其它可提供继电器方式输出的信号;事故总信号及装置主电源停电信号等。
遥感实验报告

重庆交通大学学生实验报告实验课程名称遥感原理与应用开课实验室测量与空间信息处理实验室学院 2013 年级测绘工程专业 1班学生姓名刘文洋学号 631301040126 开课时间 2015 至 2016 学年第 1 学期目录实验一 ENVI 视窗的基本操作 (2)实验二遥感图像的几何校正 (4)实验三遥感图像的增强处理 (8)实验四遥感图像的变换 (12)实验五遥感信息的融合 (15)实验六遥感图像分类 --- 监督分类 (17)实验七遥感图像分类 --- 非监督分类 (19)实验八遥感图像分类后处理 (22)实验一ENVI 视窗的基本操作一、实验目的初步了解目前主流的遥感图象处理软件 ENVI 的主要功能模块,在此基础上,掌握视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。
二、实验内容视窗功能介绍;文件菜单操作;显示数据;裁剪数据;合并波段三、实验步骤1、首先打开ENVI4.7软件,看见的只有菜单栏,如图所示:2、打开每个下拉菜单浏览其下拉栏中都有哪些功能,比如:我们如果需要打开遥感文件,则可以选择File下的打开功能open image file,打开遥感图像如下图:裁剪数据打开basic tools的resize data功能,如果需要对图像进行一系列处理,可以利用Transform,Classification等功能进行操作,在后续实验中我们也会用到其中的一些功能进行图像的一系列操作,到时候在详细叙述。
3、再熟悉了ENVI4.7的一些基本知识后我们可以简单地操作下,比如对一组数据分别用Gray Scale和Load RGB导入,看看两幅图的区别以及各自的优缺点。
四、实验结果分析在这次的实验中,我们简单的熟悉了下ENVI4.7的一些功能,发现它是可以对遥感图像进行图像几何纠正,直方图均衡,监督分类,非监督分类等一系列操作,为我们后续利用软件对遥感图像处理打下了基础。
实验二遥感图像的几何校正一、实验目的通过实习操作,掌握遥感图像几何校正的基本方法和步骤,深刻理解遥感图像几何校正的意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥测遥控技术实验四学院电子工程学生姓名:严丰班级学号:2902107014 指导老师:李晋一、实验名称:GPS信号跟踪原理与仿真二、实验程序:主程序:function[diata_dll,diata_fll]=tracksignal(iniphcode,inifd,iniph,snr,Code_Method_flag,Carrier_Meth od_flag,codew,codeb,carrierw,carrierfllb,carrierpllb)svnum = 10; %卫星号iniphcode = 500; %生成信号源的码相位inifd = 3000; %生成信号源的载波多普勒频率iniph = 5; %生成信号源的载波初相位snr = 0; %生成信号源的信噪比global time_unit; % 数据跳变时间单位global time; % 数据发送时间global time_cyc;% 一个完整扩频码周期global fs; % 采样率global nn; % 一个完整扩频周期采样点数global kk; % 数据总采样点global F_if; % 载波中频global CA_freq; % PN码速率global tc;global CA ; % 扩频码基玛global F_Carrier; % L1波段载波频率%%%%%%%%%%%%%%%%%%%%%%%%参数设置%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%time = 100*(10^(-3));time_unit = 20*(10^(-3));time_cyc = 1*(10^(-3));fs = 5*(10^6);nn = time_cyc*fs;kk = (time/time_cyc)*nn;F_if = 1.25*(10^6);F_Carrier = 1575.42*(10^6);CA_freq = 1.023*(10^6);%%%%%%%%%%%生成C/A以供使用%%%%%%%%%%PN = codegen(svnum);CA = [];k = 5;for n = 1:length(PN)CA((1+k*(n-1)):k*n) = PN(n)*ones(1,k);endtc = 1/(k*CA_freq);loop_time = time/time_cyc; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%生成信号源 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Signal_Source是生成的信号源, buffer_bit_data是随机生成的数据位,用于与最后解调的数据进行比对[Signal_Source,Phase_signal,buffer_bit_data]=CreateSource(iniphcode,inifd,iniph,snr); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%捕获%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%[fd_ac,f_ac_code] = acqu(Signal_Source); %%%%%%%%%%%%%%%%%%%%%%%%%%%%定义跟踪中用到的参数%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%IPSum_old = 0.01;QPSum_old = 0.01;%%%%%%%%%%码跟踪环滤波器参数设置%%%%%%%%%%%%%%Code_Method_flag=2; %码跟踪环鉴相法选择标志diffoffside = 0.5; %码鉴相时,正负偏移半个码片k0 =10^(-6); %码跟踪环鉴相器增益k1=10^(-3); %码跟踪环NCO增益%k1 = 50/k0; %码跟踪环NCO增益codew = 20 %自然圆频率codeb = 2 %阻尼系数offside = f_ac_code;theta_code_old = 0;offside_old = f_ac_code;CodeErr_old = 0;Bk_DLL = [];Track_Code_Buffer =[];%%%%%%%%%%%载波跟踪环滤波器参数设置%%%%%%%%%%Last_Phase = 0;Control_Buffer = [];ts = 1/fs; %采样时间间隔Carrier_Method_flag =3; %fll,pll,fll->pll的方法选择标志dem_flag = 0; %fll->pll的切换标志add = 0; %fll->pll的切换过程中用到的变量carrierw = 20 %自然圆频率carrierfllb = 0.707 %阻尼系数carrierpllb = 0.706Track_Freq_Buffer = [];track_dopplar_old = 0;%FLL环参数FLLinput_old=0;FLLoutput_old=0;track_freq_fll = 0;Sita_fll = 0;Bk_FLL = [];%PLL环参数PLLinput_old=0;PLLoutput_old=0;track_freq_pll = 0;Sita_pll = 0;Bk_PLL = [];Buffer_Data =[];adj_buffer = [];ALL_Buffer_Data = [];count_buffer = [];Demodulate_I = [];Local_Ph_Buffer = []; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%跟踪循环%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%for i = 1:1:loop_time% =================part signal source========= %Signal = Signal_Source((i-1)*nn+1:i*nn);% Signalph= Phase_signal((i-1)*nn+1:i*nn);%==============Local carrier===================%t = [0:nn-1]*ts;track_dopplar = fd_ac+track_freq_fll+track_freq_pll;Track_Freq_Buffer = [Track_Freq_Buffer track_dopplar];Local_I = cos(2*pi*(F_if+track_dopplar)*t + Last_Phase);Local_Q = sin(2*pi*(F_if+track_dopplar)*t + Last_Phase);Iph = 2*pi*(F_if+track_dopplar)*t + Last_Phase;Local_Ph_Buffer = [Local_Ph_Buffer Iph];Last_Phase = Last_Phase + 2*pi*(F_if+track_dopplar)*time_cyc; %%上一次积分结束点的相位Carrier_I = Local_I;Carrier_Q = Local_Q;% =================Create Localcode============== %ph_code_p = offside;fd_code_p = track_dopplar;CA_Code_p = CAcode(ph_code_p,fd_code_p,i);lc_p = CA_Code_p.*Signal;ph_code_e = offside+diffoffside;fd_code_e = track_dopplar;CA_Code_e = CAcode(ph_code_e,fd_code_e,i);lc_e = CA_Code_e.*Signal;ph_code_l = offside-diffoffside;fd_code_l = track_dopplar;CA_Code_l = CAcode(ph_code_l,fd_code_l,i);lc_l = CA_Code_l.*Signal;% ==========================multiply================================ %Local_P_I = lc_p.*Carrier_I;Local_P_Q = lc_p.*Carrier_Q;Local_E_I = lc_e.*Carrier_I;Local_E_Q = lc_e.*Carrier_Q;Local_L_I = lc_l.*Carrier_I;Local_L_Q = lc_l.*Carrier_Q;% ========================integration============================= %IPSum = sum(Local_P_I);QPSum = sum(Local_P_Q);IESum = sum(Local_E_I);QESum = sum(Local_E_Q);ILSum = sum(Local_L_I);QLSum = sum(Local_L_Q);% =======================Code Control==================================if Code_Method_flag==1%鉴想器theta_code = k0*((IESum.^2+QESum.^2)-(ILSum.^2+QLSum.^2));%码环路滤波器[CodeErr] = CodeLoopFilter(codew,codeb,theta_code,theta_code_old,CodeErr_old); %CodeErr是经过滤波器输出的码相位误差的估计值%码环NCOoffside=offside_old+60*k1*CodeErr; %码NCO的输出theta_code_old = theta_code; %将当前结果保存,用于下一个循环的码跟踪CodeErr_old = CodeErr; %将当前结果保存,用于下一个循环的码跟踪offside_old = offside; %将当前结果保存,用于下一个循环的码跟踪Bk_DLL = [Bk_DLL theta_code]; %记录跟踪过程中的码环鉴想器的输出Track_Code_Buffer = [Track_Code_Buffer offside]; %记录跟踪过程中的码环NCO的数出elseif Code_Method_flag==2%鉴想器theta_code = ((IESum.^2+QESum.^2)-(ILSum.^2+QLSum.^2))/((IESum.^2+QESum.^2)+(ILSum.^2+QLSum.^2));theta_code =10.^(-3)*(1-sqrt(1-theta_code.^2))/(2*theta_code);%码环路滤波器[CodeErr] = CodeLoopFilter(codew,codeb,theta_code,theta_code_old,CodeErr_old); %CodeErr是经过滤波器输出的码相位误差的估计值%码环NCOoffside=offside_old+500*CodeErr; %码NCO的输出theta_code_old = theta_code; %将当前结果保存,用于下一个循环的码跟踪CodeErr_old = CodeErr; %将当前结果保存,用于下一个循环的码跟踪offside_old = offside; %将当前结果保存,用于下一个循环的码跟踪Bk_DLL = [Bk_DLL theta_code]; %记录跟踪过程中的码环鉴想器的输出Track_Code_Buffer = [Track_Code_Buffer offside]; %记录跟踪过程中的码环NCO的数出end% ====================Carrier control=============================%if Carrier_Method_flag == 1 %%%%%%%%%%%%%%% fll跟踪环路%鉴想器real_Q = IPSum_old*QPSum-QPSum_old*IPSum;real_I = IPSum_old*IPSum+QPSum_old*QPSum;a=real_Q/real_I;theta_fll = atan(real_Q/real_I);Bk_FLL = [Bk_FLL theta_fll];FLLinput = theta_fll/(2*pi*time_cyc);%环路滤波器FLLoutput = CarrierLoopFilter(carrierw,carrierfllb/2,FLLinput,FLLinput_old,FLLoutput_old);%FLL环NCOSita_fll = Sita_fll+FLLoutput;track_freq_fll = -Sita_fll; %FLL环跟踪到的多普勒频率 (由于反正切主值区间造成的)FLLinput_old=FLLinput; %将当前结果保存,用于下一个循环的载波跟踪FLLoutput_old=FLLoutput; %将当前结果保存,用于下一个循环的载波跟踪IPSum_old = IPSum; %将当前结果保存,用于下一个循环的载波跟踪QPSum_old = QPSum; %将当前结果保存,用于下一个循环的载波跟踪elseif Carrier_Method_flag == 2 %%%%%%%%%%%%%%%%%%%%%%%costa跟踪环路theta_pll = atan(QPSum/IPSum);PLLinput = theta_pll/(2*pi*time_cyc);Bk_PLL = [Bk_PLL theta_pll];%LoopFilterPLLoutput = CarrierLoopFilter(carrierw,carrierpllb/2,PLLinput,PLLinput_old,PLLoutput_old);track_freq_pll = -PLLoutput;PLLinput_old=PLLinput; %将当前结果保存,用于下一个循环的载波跟踪PLLoutput_old=PLLoutput; %将当前结果保存,用于下一个循环的载波跟踪elseif Carrier_Method_flag == 3 %%%%%%%%%%%%%%%%%%%%fll跟踪环路->costaif dem_flag == 0real_Q = IPSum_old*QPSum-QPSum_old*IPSum;real_I = IPSum_old*IPSum+QPSum_old*QPSum;theta_fll = atan(real_Q/real_I);FLLinput = theta_fll/(2*pi*time_cyc);Bk_FLL = [Bk_FLL theta_fll];%LoopFilterFLLoutput = CarrierLoopFilter(carrierw,carrierfllb/2,FLLinput,FLLinput_old,FLLoutput_old);;%NCOSita_fll = Sita_fll+FLLoutput;track_freq_fll = -Sita_fll;FLLinput_old=FLLinput; %将当前结果保存,用于下一个循环的载波跟踪FLLoutput_old=FLLoutput; %将当前结果保存,用于下一个循环的载波跟踪IPSum_old = IPSum; %将当前结果保存,用于下一个循环的载波跟踪QPSum_old = QPSum; %将当前结果保存,用于下一个循环的载波跟踪elseif dem_flag == 1theta_pll = atan(QPSum/IPSum);PLLinput = theta_pll/(2*pi*time_cyc);Bk_PLL = [Bk_PLL theta_pll];%LoopFilterPLLoutput = CarrierLoopFilter(carrierw,carrierpllb/2,PLLinput,PLLinput_old,PLLoutput_old);track_freq_pll = -PLLoutput;PLLinput_old=PLLinput; %将当前结果保存,用于下一个循环的载波跟踪PLLoutput_old=PLLoutput; %将当前结果保存,用于下一个循环的载波跟踪endendadj_flag = track_dopplar - track_dopplar_old; %相邻两次跟踪到的多普勒频率值之差,用以判断是否FLL跟踪的频率已经足够精确,从而转入PLLtrack_dopplar_old = track_dopplar;adj_buffer = [adj_buffer adj_flag];outdata = sign(real(IPSum));ALL_Buffer_Data = [ALL_Buffer_Data outdata];if adj_flag < 1 %看相邻两次跟踪到的多普勒频率之差是否小于1Hzadd = add+1;elseadd = 0;endif add >= 2 %看是否有连续两次跟踪到的多普勒频率之差小于1Hz,若有,则认为频率跟踪已很稳定而精确,可以转入PLLdem_flag = 1;endif dem_flag == 1count_time = i;count_buffer = [count_buffer count_time];Buffer_Data = [Buffer_Data outdata]endend%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%位同步与数据解调%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Buffer_Data_out = framecheck2(Buffer_Data,count_buffer); %位同步l_i_d = time/time_unit;l_o_d = length(Buffer_Data_out);l_zeros = l_i_d - l_o_d;Buffer_Data_out = [zeros(1,l_zeros) Buffer_Data_out]; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算跟踪精度%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Track_Code_Buffer;Track_Freq_Buffer;l_dll = length(Track_Code_Buffer);l_fll = length(Track_Freq_Buffer);diata_dll = sqrt(sum((Track_Code_Buffer(40:l_dll)-iniphcode).^2)/length(Track_Code_Buffer(40:l_dll))); %码跟踪环跟踪精度diata_fll = sqrt(sum((Track_Freq_Buffer(40:l_fll)-inifd).^2)/length(Track_Freq_Buffer(40:l_fll)));%载波跟踪环的跟踪精度%Track_Ph_Buffer = Local_Ph_Buffer-Phase_signal; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%画图显示跟踪结果%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%subplot(1,2,1);plot(Track_Code_Buffer);xlabel('时间(ms)');ylabel('码相位跟踪值');title('码跟踪结果');grid onsubplot(1,2,2);plot(Track_Freq_Buffer);xlabel('时间(ms)');ylabel('多普勒频率跟踪结果(Hz)')title('载波跟踪结果');grid on% figure;%plot([1:length(buffer_bit_data)],buffer_bit_data,'b*',[1:length(Buffer_Data_out)],Buffer_Dat a_out,'ro');% set(gca,'xtick',[1:1:5]);% set(gca,'xticklabel',{'1','2','3','4','5'});% set(gca,'ytick',[-1:1:1]);% set(gca,'yticklabel',{'-1','0','1'});% xlabel('数据位');% ylabel('解调结果')% title('数据解调输出结果');% legend('数据','解调输出数据');% grid on% figure;% plot(Bk_DLL);% title('Track Code 输入控制')% grid on%% figure;% plot(Track_Ph_Buffer);% title('Track differ Phase')% grid on三、实验结果:数据修改:svnum = 10; %卫星号iniphcode = 300; %生成信号源的码相位inifd = 4000; %生成信号源的载波多普勒频率iniph = 5; %生成信号源的载波初相位snr = 0; %生成信号源的信噪比实验运行结果:a.输出结果截图:b.程序输出结果:ans =21.5481c.码相位跟踪结果及载波跟踪结果matlab波形图:。