列控车载设备知识串讲汇总资料
第四章 列控车载设备控车原理(电务维护)

第四章车载设备控车原理第一节地面配置条件列控车载设备需要地面设备发送的正确信息,才能正常控车,因此要确保车载设备正常工作,地面设备必需具备一定的技术条件。
这里介绍地面的配置条件。
一 轨道电路㈠区间轨道电路根据CTCS有关技术规范,不同级别的线路其轨道电路制式有所不同,主要包括以下制式:CTCS-0级:国产4信息、8信息、18信息移频CTCS-1级:UM-71、ZPW-2000CTCS-2级:UM-71、ZPW-2000当CTCS-2级列控车载设备运行于CTCS-0级和CTCS-1级线路时,列控车载设备采集轨道电路的信号,但不输出制动。
国产移频载频:550Hz、650Hz、750Hz、850Hz;下行线使用载频:550Hz、750Hz上行线使用载频:650Hz、850Hz;低频信息18个:7 Hz、8 Hz、8.5 Hz、9 Hz、9.5 Hz、11 Hz、12.5 Hz、13.5 Hz、15 Hz、16.5 Hz、17.5 Hz、18.5 Hz、20 Hz、21.5 Hz、22.5 Hz、23.5 Hz、24.5 Hz、26HzUM-71载频:1700Hz、2000Hz、2300Hz、2600Hz;下行线使用载频:1700Hz、2300Hz 上行线使用载频:2000Hz、2600Hz;低频信息18个:10.3 Hz、11.4 Hz、12.5 Hz、13.6 Hz、14.7 Hz、15.8 Hz、16.9 Hz、18 Hz、19.1 Hz、20.2 Hz、21.3 Hz、22.4 Hz、23.5 Hz、24.6 Hz、25.7 Hz、26.8 Hz、27.9 Hz、29HzZPW-2000载频:载频共8种如下表4-1:表4-1 ZPW-2000轨道电路载频信息名称1700-1 1700-22000-12000-22300-12300-22600-1 2600-2频率Hz2598.7 1701.4 1698.72001.41998.72301.42298.72601.4下行线使用载频:1700-1、1700-2、2300-1、2300-2;上行线使用载频:2000-1、2000-2、2600-1、2600-2;低频信息18个:10.3 Hz、11.4 Hz、12.5 Hz、13.6 Hz、14.7 Hz、15.8 Hz、16.9 Hz、18 Hz、19.1 Hz、20.2 Hz、21.3 Hz、22.4 Hz、23.5 Hz、24.6 Hz、25.7 Hz、26.8 Hz、27.9 Hz、29Hz。
CTCS-3列控系统及车载设备介绍~资料
图例 停车标志牌 无源应答器 有源应答器
CTCS-3级列控系统总体结构包括:地面设备、车载设备、GSM-R无线 通信网络、信号数据传输网络四部分。
CTCS-3列控系统介绍—主要技术原则
(1)CTCS-3级列控系统满足运营速度 350km/h、最小
追踪间隔3分钟的要求。
(2)CTCS-3级列控系统满足正向按自动闭塞追踪运行,
GSM-R 无线网络
调度中心 CTC
无线闭塞中心 RBC
列控中心
车站联锁
ZPW 2000 轨道电路 轨道电路
LEU LEU
地面应答器
CTCS-3列控系统介绍—系统总体结构
车 载 设 备
司机操纵台及常用制动接口 输入 接口 输出 接口 车载安全计算机 C3 控制单元 C2 控制单元 MVB 车载安全计算机 C2 控制单元 C3 控制单元 测速 单元 轨道电路信 息接收单元 应答器信息 接收模块
CTC车站 自律分机
车站 列控中心
微机 监测
中继站 列控中心
微机 监测 信号集中监测数据通信以太网
微机 监测
车站 列控中心
CTC车站 自律分机
车站 联锁
列控中心安全数据通信局域网 信号安全数据通信以太网 调度集中数据通信以太网
CTC
行调台 维修 中心 其他 调度台 综合 维修台
TSR
临时限速服 务器
PG
GSM-R 电台
DMI
DMI MVB 列车转换网关
测速模块 测速 单元
紧急制动接口
无线通信模块 通信 接口 单元 通用 加密 单元
Profibus RS-485
记录器 应答器信息 接收模块 CAU 轨道电路信 息接收单元
4.3 CTCS-2列控车载设备

待机模式SB
投入电源后,系统就直接转入本模式。在 本模式下,ATP车载装置的接收轨道电路信息、 接收应答器信息等功能有效,但不进行速度比 较等控制,同时无条件输出制动。
完全监控模式FS
当车载设备具备列控所需的全部基本数据 (轨道电路信息、应答器信息、列车数据)时, 列控车载设备生成目标距离模式曲线,并能通 过DMI显示列车运行速度、允许速度、目标速 度和目标距离等,控制列车安全运行 。
部分监控模式(PS)
列控车载设备可接收到轨道电路允许行车信 息,但线路数据缺损时,列控车载设备产生固定 限制速度,控制列车运行 。股道出发、得不到应 答器线路数据、缺省线路数据时的模式。
引导模式CO
用于车站信号设备故障时。车站办理引导接 车,地面信号设备对轨道电路传输HB码。车载 ATP装置接收接近区段轨道电路信息HB码转入本 模式,产生固定限制速度(25km/h),只有超 过其速度时才输出制动。
1.利用应答器信息锁定载频 根据应答器信息中的【CTCS-1】信息包锁定轨 道电路载频。 2.利用DMI的选择 根据DMI上下行载频按键选择锁定载频。 3.利用轨道电路信息锁定载频 符合《主体化机车信号系统技术条件(暂行)》 (科技运函[2004]114号)中有关载频锁定 的要求。
4.各种载频锁定方法的相互关系 在CTCS-1/0级区段,按上述DMI选择和轨道 电路信息锁定载频的方法中最新接收的指令锁定 载频。 在CTCS-2级区段,优先采用应答器信息锁定载 频。如果未收到应答器信息,也可通过DMI选择 或轨道电路信息锁定载频。 (十二)两种车载工作方式可选择 (十三)与LKJ接口
(十五)与动车组(EMU)接口 列控车载设备接收EMU输入的牵引位置、制动位置、 零位位置、向前位置、向后位置等信息,向EMU输 出紧急制动、最大常用制动、中等常用制动、弱常 用制动、切除牵引等指令。
第七章 列控车载设备20120424
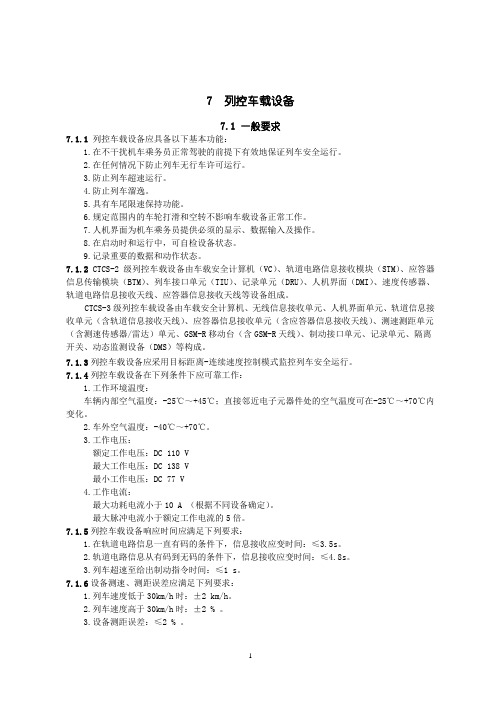
7 列控车载设备7.1 一般要求7.1.1 列控车载设备应具备以下基本功能:1.在不干扰机车乘务员正常驾驶的前提下有效地保证列车安全运行。
2.在任何情况下防止列车无行车许可运行。
3.防止列车超速运行。
4.防止列车溜逸。
5.具有车尾限速保持功能。
6.规定范围内的车轮打滑和空转不影响车载设备正常工作。
7.人机界面为机车乘务员提供必须的显示、数据输入及操作。
8.在启动时和运行中,可自检设备状态。
9.记录重要的数据和动作状态。
7.1.2 CTCS-2级列控车载设备由车载安全计算机(VC)、轨道电路信息接收模块(STM)、应答器信息传输模块(BTM)、列车接口单元(TIU)、记录单元(DRU)、人机界面(DMI)、速度传感器、轨道电路信息接收天线、应答器信息接收天线等设备组成。
CTCS-3级列控车载设备由车载安全计算机、无线信息接收单元、人机界面单元、轨道信息接收单元(含轨道信息接收天线)、应答器信息接收单元(含应答器信息接收天线)、测速测距单元(含测速传感器/雷达)单元、GSM-R移动台(含GSM-R天线)、制动接口单元、记录单元、隔离开关、动态监测设备(DMS)等构成。
7.1.3列控车载设备应采用目标距离-连续速度控制模式监控列车安全运行。
7.1.4列控车载设备在下列条件下应可靠工作:1.工作环境温度:车辆内部空气温度:-25℃~+45℃;直接邻近电子元器件处的空气温度可在-25℃~+70℃内变化。
2.车外空气温度:-40℃~+70℃。
3.工作电压:额定工作电压:DC 110 V最大工作电压:DC 138 V最小工作电压:DC 77 V4.工作电流:最大功耗电流小于10 A (根据不同设备确定)。
最大脉冲电流小于额定工作电流的5倍。
7.1.5列控车载设备响应时间应满足下列要求:1.在轨道电路信息一直有码的条件下,信息接收应变时间:≤3.5s。
2.轨道电路信息从有码到无码的条件下,信息接收应变时间:≤4.8s。
21-CTCS-3级列控车载设备
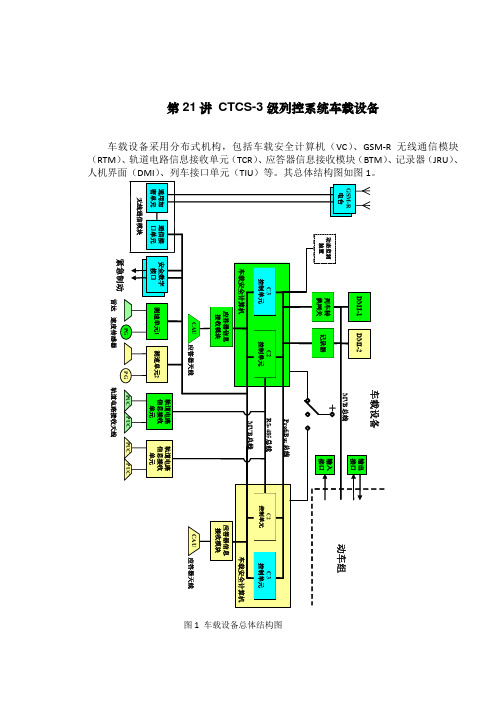
第21讲 CTCS-3级列控系统车载设备车载设备采用分布式机构,包括车载安全计算机(VC )、GSM-R 无线通信模块(RTM )、轨道电路信息接收单元(TCR )、应答器信息接收模块(BTM )、记录器(JRU )、人机界面(DMI )、列车接口单元(TIU )等。
其总体结构图如图1。
图1 车载设备总体结构图 雷达轨道电路接收天线速度传感器一、设备配置车载设备采用分布式结构。
设备包括车载安全计算机(VC)、应答器信息接收模块(BTM)、轨道电路信息接收单元(TCR)、测速测距单元(SDU)、人机界面(DMI)、列车接口(TIU)、司法记录单元(JRU)、GSM-R无线通信单元(RTU)、动态监测接口等。
车载设备与动车组的接口采用继电器或MVB总线方式。
车载设备中的车载安全计算机(VC)、应答器信息接收模块(BTM)、安全输入输出接口(VDX)、轨道电路信息接收单元(TCR)、测速测距单元(SDU)、人机界面(DMI)等关键设备均采用冗余配置。
车载安全计算机中的CTCS-3控制单元和CTCS-2控制单元独立设置,CTCS-3控制单元负责在CTCS-3线路正常运行时的核心控制功能,CTCS-2控制单元负责后备系统的核心控制功能。
300km/h动车组不装设列车运行监控装置(LKJ)。
二、设备功能CTCS-3级列控车载设备负责接收地面数据命令信息,生成速度模式曲线,监控列车运行,保证列车运行安全。
CTCS-3级列控车载设备应具有以下基本功能:1)自检功能车载设备启动时首先要进行系统自检以确认设备是否有效,自检包括:测试常用制动、紧急制动命令能否正确输出,测试TCR完好,测试DMI显示等。
车载设备的自检完成后能够在DMI上显示自检结果。
2)数据输入和存储车载设备能够记录外部输入的列车参数以及发生变化的时间,记录存储的列车参数包括:车次号,由司机手动输入并存储。
司机ID号,由司机手动输入并存储。
列车长度,由司机手动输入并存储。
列控车载设备概述
第一章概述1第一章概述本书介绍的是基于轨道进行信息传输的点连式列控车载设备CTCS2-200H型,主要针对CTCS-2级列控系统,并适用于控制动车组的运行。
第一节车载设备的系统构成一、列车运行控制系统与CTCS-2列车运行控制系统(train control system )是以技术手段对列车运行方向、运行间隔和运行速度进行控制,使列车能够安全运行并且提高运行效率的系统,简称列控系统。
(一)、列车运行控制系统背景列车运行控制系统是随着列车技术的发展以及列车与地面信息传输系统发展而发展的轨道交通信号系统,将先进的控制技术、通信技术、计算机技术与铁路信号技术溶为一体的行车指挥、控制、管理自动化系统,是保证行车安全、提高运输效率的核心。
高速铁路信号设备的发展离不开列车运行控制系统的发展。
列控系统作为一种铁路行车安全控制设备,车载信号属于主体信号,即做为行车凭证,直接给司机指示列车应遵守的安全速度,自动监控列车运行速度,可靠地防止由于司机失去警惕或错误操作可能酿成超速运行、列车颠覆、冒进信号或列车追尾等事故。
高速铁路的信号与控制设备,是以电子器件或微电子器件为主的集中管理、分散控制为主的所谓集散式控制方式,分为行车指挥自动化与列车运行自动化两大部分。
信号显示应以机车自动信号为主,车站与区间的地面信号为辅。
由于列车行车速度高,列车密度大,因此区间行车采用四显示——红、黄、绿黄、绿。
各国铁路对列车运行控制系统发展理由看法都比较一致。
各国都认为:在最高运营速度为160km/h以下的铁路采用列车自动停车装置或有简单速度检查功能的列车自动停车装置。
在提速线路(如最高运营速度提高到200km/h的线路)列车速度自动监督系统是必须装备的安全设备。
在高速铁路则必须安装列车自动控制系统,一些国家的铁路部门(如日本和德国的铁路)也在提速线路和繁忙的普通线路上安装列车自动控制系统。
这是与人的视距小于列车制动距离和操作所需要的时间(司机视觉能力对信号作出判断最少时间为3秒到5秒)有关。
CTCS列控车载设备介绍(二)硬件结构及组成
CTCS列控车载设备介绍(二)硬件及结构2009.8.10目录CTCS3列控车载设备结构CTCS3列控车载设备组成CTCS 车载设备和列车接口C3/C2车载模式及与既有C2差别1234列控车载设备C2/C3一体化设计原则当前300公里动车上安装的车载设备采用C3/C2一体化设计原则。
C3车载设备同时兼容具备C2车载功能。
实现无线信息的加密和解密ZPW2000轨道电路信息读取记录单元,记录系统C a b l e 10目录CTCS3列控车载设备结构CTCS3列控车载设备组成CTCS 车载设备和列车接口C3/C2车载模式及与既有C2差别1234CTCS-3列控车载设备介绍—300T 车载主机柜图片设备单元基本功能描述(主机柜内)•车载安全计算机单元(ATPCU)–ATP CU是CTCS-3主机控制核心单元,接收RBC传来的数据,结合BTM传来的数据和当前列车速度计算速度曲线,监控列车运行。
•CTCS-2专用传输模块(C2CU)–C2CU是CTCS-2主机控制核心单元,接收BTM传来的数据,结合TCR传来的数据和当前列车速度计算速度曲线,监控列车运行。
设备单元基本功能描述(主机柜内•列车网关(TSG)–TSG列车总线转换网关,用于连接车载设备Profibus总线和车辆MVB总线。
在CRH2型车上主要是用于DMI数据与ATPCU和C2CU之间数据交互。
•速度距离处理单元(SDP)–SDP单元接收从SDU传来的原始脉冲记数,经过运算处理得到当前列车运行的速度和距离数据,再通过通信总线发送给CTCS-3主机控制单元和CTCS-2主机控制单元。
注:以上四个单元在硬件上是完全一样的,通过烧写不同软件实现不同的功能。
设备单元基本功能描述(主机柜内)•测速测距单元(SDU)–SDU单元为速度传感器和测速雷达信号部分提供电源,当列车运行时,SDU模块能够接收速度传感器和测速雷达发出的脉冲信号,并将脉冲信号转换成数字数据通过MVB总线发送给速度距离处理模块SDP。
列控车载设备概述

第一章概述1第一章概述本书介绍的是基于轨道进行信息传输的点连式列控车载设备CTCS2-200H型,主要针对CTCS-2级列控系统,并适用于控制动车组的运行。
第一节车载设备的系统构成一、列车运行控制系统与CTCS-2列车运行控制系统(train control system )是以技术手段对列车运行方向、运行间隔和运行速度进行控制,使列车能够安全运行并且提高运行效率的系统,简称列控系统。
(一)、列车运行控制系统背景列车运行控制系统是随着列车技术的发展以及列车与地面信息传输系统发展而发展的轨道交通信号系统,将先进的控制技术、通信技术、计算机技术与铁路信号技术溶为一体的行车指挥、控制、管理自动化系统,是保证行车安全、提高运输效率的核心。
高速铁路信号设备的发展离不开列车运行控制系统的发展。
列控系统作为一种铁路行车安全控制设备,车载信号属于主体信号,即做为行车凭证,直接给司机指示列车应遵守的安全速度,自动监控列车运行速度,可靠地防止由于司机失去警惕或错误操作可能酿成超速运行、列车颠覆、冒进信号或列车追尾等事故。
高速铁路的信号与控制设备,是以电子器件或微电子器件为主的集中管理、分散控制为主的所谓集散式控制方式,分为行车指挥自动化与列车运行自动化两大部分。
信号显示应以机车自动信号为主,车站与区间的地面信号为辅。
由于列车行车速度高,列车密度大,因此区间行车采用四显示——红、黄、绿黄、绿。
各国铁路对列车运行控制系统发展理由看法都比较一致。
各国都认为:在最高运营速度为160km/h以下的铁路采用列车自动停车装置或有简单速度检查功能的列车自动停车装置。
在提速线路(如最高运营速度提高到200km/h的线路)列车速度自动监督系统是必须装备的安全设备。
在高速铁路则必须安装列车自动控制系统,一些国家的铁路部门(如日本和德国的铁路)也在提速线路和繁忙的普通线路上安装列车自动控制系统。
这是与人的视距小于列车制动距离和操作所需要的时间(司机视觉能力对信号作出判断最少时间为3秒到5秒)有关。
第十六讲CTCS-2级列控车载设备

6 . 3 . 5 工作模式 在 CTCS-2 级工作状态下,列控车载设备主要有以 下六种工作模式。 1. 待机模式( SB ) 在列控车载设备默认等级设置为 CTCS-2 级的情况 下,上电后,列控车载设备应自动进入待机模式。 在待机模式下,列控车载设备应保持接收轨道电路 信息、接收应答器信息功能有效,不进行速度比较控制。 处于本模式时,应自动启动防溜逸控制功能。
屏幕显示器上车次输入方法
6 . 3 . 4 车载设备的主要功能 1. 载频锁定功能
STM 应具有接收多个载频的能力。
采用以下三种方法锁定载频: ⑪利用应答器信息锁定载频:根据应答器信息中的
【CTCS】包锁定轨道电路载频。
⑫利用 DMI 的选择:根据 DMI 上下行载频按键选 择锁定载频。
⑬利用轨道电路的载频锁定逻辑。
②TSM (目标速度监控区)区间 在设备制动优先情况下的 TSM 区间的速度控制: 运行速度达到应实施弱常用制动速度、中等常用制 动速度时,列控车载设备对应输出弱常用制动、中等常 用制动,运行速度达到常用制动模式曲线时,输出最大 常用制动。 运行速度低于常用制动模式曲线时,可输出中等常 用制动,低于中等常用制动速度时,输出弱常用制动。 如图 6-22 所示。
当运行速度达到紧急制动模式曲线时,输出紧急制动, 运行速度降到 0 km/h 司机按压缓解按键后,缓解制动。
⑫模式曲线与制动指令之间的关系(司机制动优先)
①CSM 区间 在司机制动优先情况下的 CSM 区间的速度控制: 当运行速度达到报警速度时,输出制动预警音,运行 速度低于报警速度 2s 后制动预警音停止。 运行速度达到常用制动模式曲线时,输出最大常用制 动速度低于缓解速度时向司机提示允许缓解,司机按压缓 解按键后,缓解制动。 运行速度达到,紧急制动模式曲线时,输出紧急制动, 运行速度降到 0 km/h 司机按压缓解按键后,缓解制动。 如图 6-23 所示,左图为常用制动,右图为紧急制动。
第七章列控车载设备的使用(电务维护)

第七章列控车载设备的使用(电务维护)第七章列控车载设备的使用设备的良好率和较高的使用率,与设备的正确操作有很大的关系。
列控车载设备分别安装在动车组的两端,在司机室的人机界面DMI装置上有操作按键,在机械室内的主机有拨码操作开关和隔离开关等。
按不同的使用目的,列控车载设备可进行以下操作:司机主要完成:开机操作、设备工作中DMI使用操作、应急情况隔离开关操作等。
维护人员主要完成出入库检测开机操作、参数设定操作、隔离开关和DMI检查操作、数据文件转储操作等。
第一节设备参数设定针对不同的列车、不同的区段,列控车载设备的运用是不同的,并且也与车辆的轮径有很大的关系。
所以车载设备在运行时或进行检测维护时,要进行设备参数的设定。
CTCS2-200H型列控车载设备需要对隔离开关、车种、轮径、机控/人控、CTCS-0/CTCS-2等设定。
在运行开始之前先确认数据记录单元的基板是否已经插入了PC卡、连续信息接收单元的基板是否已经插入了CF卡,然后对设备的拨码开关进行设定。
一、隔离开关隔离开关在正常时处于正常位置。
在列控车载设备发生故障时,使用隔离开关,将切除车载设备输出到车体的制动指令。
在CTCS2-200H型车载设备中输出到车体的制动指令是由ATP/LKJ 、ATP 和LKJ 隔离开关的组合形成的(LKJ有自己的隔离开关)。
列控车载设备隔离开关和制动指令输出的关系如下表7-1所示。
表7-1 车载设备隔离开关和制动指令输出的关系序号 ATP/LKJ模式 ATP隔离开关LKJ隔离开关制动指令输出源1ATP模式正常正常ATPATP模式正常隔离ATP2ATP模式隔离正常LKJ34ATP模式隔离隔离车体LKJ模式正常正常LKJ5LKJ模式正常隔离车体6LKJ模式隔离正常LKJ7LKJ模式隔离隔离车体8隔离开关的操作在停车或是列控车载设备电源切断的时候进行操作。
对于CTCS2-200H型车载设备操作方法如下图7-1所示。
图7-1 隔离开关的操作“隔离”设定流程:①将防止误操作的盖子放下。
CTCSC列控车载设备介绍专题培训课件
3
目标距离
列车前端至运行前方目标点的距离。
4
目标-距离模式曲 线
以目标速度、目标距离、线路条件、列 车特性为基础生成的保证列车安全运行的 制动模式曲线。
2023/12/30
12
运行速度 目标速度 允许速度
运行速度 目标速度 干预速度
100 150 200 250
50 0
200
300
350 400
100 150 200 250
〔2014〕30号) • 《动车组列控车载设备和CIR设备应急操作指南》(运电高信函
〔 2014〕102号) • 《铁路电务安全规则》 (铁总运〔2015〕26号)
2023/12/30
4
理论考试
• 技术资料
• 《CTCS-2级列车运行控制系统》 • 《CTCS-3级列车运行控制系统》 • 《动车组列控车载设备维修岗位》 • 《列控车载设备典型故障案例》
人控 16辆
12:35:28 进入CTCS-2级 12:35:20 进入待机模式
K553+867
车次号
D26
+
缓解
时间日期
13:26:48 14-03-20
警惕
注意:当列车处于目标速度监视区时,目标距离区进行显示, 当列车处于顶棚速度监视区时目标距离区无显示。
2023/12/30
14
中国列车控制系统(CTCS)
离连续速度控制模式监控列车运行(技规92条)。 • CTCS-3级:等同 ETCS 2级,基于无线信息传输 (GSM-R)+轨道电路。 • CTCS-4级:等同 ETCS 3级,基于无线信息传输 (GSM-R)+列车完整性
检查。
2023/12/30
第八讲 列控车载设备(1)
主要内容
车载设备基本组成
列 控 系 统 车 载 设 备
测速与定位
速度监控基本原理
人机界面
2010/10/27 2
轨道交通控制与安全
国家重点实验室(北京交通大学)
STATE KEY LAB OF RAIL TRAFFIC CONTROL & SAFETY
列控系统关键功能模块
列车占用检查 行车许可生成 地车信息传输
tk ve (tk ) ve (t0 ) ae dt t0 tk vn (tk ) vn (t0 ) an dt t0 tk v (t ) v (t ) a dt u 0 u u k t0
tk ve dt 0 ( h N ) cos t0 tk vn dt 0 M h t0 tk h h v dt 0 u t 0
国家重点实验室(北京交通大学)
STATE KEY LAB OF RAIL TRAFFIC CONTROL & SAFETY
二、列车测速与定位
列车位置描述:列车方向对应的机车前端位置距LRBG的距离。
列车经过LRBG后,进行定位
列车估计前端位置至LRBG的距离 与该距离对应的置信区间,从而确
LRBG 方向 orientation 反向 正向
估计的运行距离 LRBG 方向 正向 反向
b)置
信区间
过读 误差
欠读 误差
d)
相对于 LRBG 的列车方向 正向 反向 激活驾驶台
b) 置信
区间
过读 误差
欠读 误差
轨道交通控制与安全
国家重点实验室(北京交通大学)
STATE KEY LAB OF RAIL TRAFFIC CONTROL & SAFETY
列控车载设备讲解
部分监控模式 (PS)
仅适用于C2车载
该模式仅用于CTCS-2级控车。在C2等级时,当车载 设备接收到轨道电路允许行车信息,而缺少应答器提供 的线路数据时,列控车载设备产生一定范围内的固定限 制速度,监控列车运行。
机车信号模式 (CS)
仅适用于C2车载
该模式仅用于CTCS-2级控车。当列车运行到地面设备 配置未装备CTCS-3/CTCS-2级列控系统的区段时,根据行
CTCS-3列控系统保证高速动车组的运行安全,CTCS-2列控 系统用来兼容既有动车组上线运行,并作为CTCS-3列控系 统的后备系统;CTCS-3级列控系统属于基于通信的列控系 统(CBTC)范畴。
CTCS-3级的最高允许速度可以达到350km/h及以上,
目前实现过的最高速度为实验线时达到过400km/h以上。
车管理办法(含调度命令),经司机操作后,列控车载设
备按固定限制速度(最高限速80km/h)监控列车运行,并 显示机车信号。 当列车越过禁止信号时触发紧急制动。
四、概述
在CTCS-2级列控系统的基础上,地面增加RBC设备,车载设备增 加GSM-R无线电台和信息接收模块,实现基于GSM-R无线网络的双向 信息传输,构成CTCS-3级列控系统。
引导模式 (CO)
适用于C3车载和C2车载
当开放引导信号或出站信号机开放且列车前端距 离出站信号机较远(大于250米)发车时,列控车载设 备生成目标距离连续速度控制模式曲线,并通过DMI显
示列车运行速度、允许速度、目标速度和目标距离等,
C2 时车载设备按固定限制速度 40km/h 监控列车运行, 司机负责在列车运行时检查轨道占用情况。
速 15km/h 触发紧急制动、速度在 250km/h 及以下时超速
CTCS3-300S型列控车载设备系统培训讲义-司机操作
2. 人机界面变更(6/6)
新变化:
➢9)车长选择由210/420更新为:
➢10)CTCS2等级下FS/RO/CO模式下,MRSP曲线的第一个起模点到目标点显示 斜线,后面的变速点均以台阶方式显示,其它模式下不显示MRSP曲线
1. 300S型ATP简介 (1/4)
CTCS3-300S型列控车载设备(简称300S设备)根据收到的地 面信息(静态曲线、临时限速、行车许可长度、坡度信息),生 成速度控制曲线,并与列车实际速度进行比较。当实际速度超过 了速度控制曲线时,车载设备自动施加制动。地面信息、车载设 备控制状态通过置于驾驶室控制台的DMI显示。司机在注视前方 的同时监视DMI,根据DMI信息控制列车的运行。同时,司机还 可根据运营场景需要,通过按压DMI按300S型ATP简介(4/4)
当列控车载设备工作在CTCS-3级时,车载设备从RBC获得线路信 息及行车许可长度来计算控车曲线,L3码以下时结合地面码序, 确定最终行车许可长度。
CTCS-2级作为CTCS-3级的后备系统。当GSM-R网络故障或因其它 原因不满足CTCS-3级条件时,列控车载设备将工作在CTCS-2等级, 从轨道电路和应答器获得行车信息,监控列车运行。
➢11) CS模式显示为人控优先
1. 300S型ATP简介 2. 人机界面变更 3. 逻辑变更 4. 任务启动过程 5. DMI其他操作 6. 注意事项及故障处理
3. 逻辑变更(1/2)
新变化:
➢1)运行中可以修改车次号,且增加对新车次号(SD、SG、RD、RG)的输入 支持
➢2)在CTCS3等级执行过分相命令时,不再输出切除牵引命令 ➢3)增加使用C2码序功能:在C3/FS模式下,如轨道电路为L3、L2、L、LU、U、
13-CTCS-2级列控系统车载设备

第13讲CTCS-2级列控系统车载设备一、CTCS2车载设备及其功能主要功能:列控数据采集,静态列车速度曲线计算,动态列车速度曲线的计算,缓解速度的计算,列车定位、速度的计算和表示、运行权限和限速在DMI上的表示。
运行权限和限速的监控,在任何情况下防止列车无行车许可运行,防止列车超速运行,防止列车溜逸。
列车超速时,车载设备的超速防护具备采取声光报警、切除牵引力、动力制动、空气常用制动、紧急制动等措施。
车载设备发生故障时,及时报警提醒机车乘务员并对故障设备进行必要的隔离。
司机行为的监控、反向运行防护、CTCS2信EB, SB图1 列控车载系统组成CTCS 2级车载设备结构如图1所示,动车组的两端各安装一套独立的ATP车载设备;总体结构采用硬件冗余结构,关键设备均采用双套,核心设备采用三取二或者二乘二取二结构;力求达到高安全性和可用性:安全等级达到SIL4级。
车载设备主要包括以下内容。
1)车载安全计算机(VC):车载安全计算机是ATP装置的核心部分,负责从ATP各个模块搜集信息,生成制动模式曲线,必要时通过故障-安全电路向列车输出制动信息,控制列车安全运行。
为了保证列车控制的安全性和设备的冗余性,安全计算机一般采用二乘二取二或者二取二冗余结构,安全等级达到SIL4级。
2)应答器信息接收模块(BTM):BTM天线接收来自地面应答器的信号,传输至BTM模块进行信息解调处理。
BTM是一个采用二取二技术的故障-安全模块。
通过一个专用信息接口和安全计算机同步。
同时它还提供通过应答器中点时的确切时间,能够让ATP 车载设备在几厘米的准确范围内进行列车定位校准。
3)连续信息接收模块(STM):通过STM天线接收轨道电路信号,解调轨道电路上传的信号信息,将解调的信息及时传递给安全计算机和列车运行监控记录装置。
STM 模块是安全模块,可接收ZPW-2000系列轨道电路及4信息、8信息、18信息等传统移频轨道电路的信息。
列控车载设备知识串讲汇总

CTCS3-300T车载设备组成、功能、使用及维护介绍(简明版)1.300T车载设备系统组成(1)300T车载设备硬件采用哪种结构设计?这种结构的优点是什么?答:300T车载设备硬件采用分布式结构设计,各模块功能相对独立,通过总线(MVB总线、Profibus总线)连接起来组成完整的车载系统。
这种分布式结构可以将模块分散放置,充分利用动车车头内有限的空间,安装方式更加灵活。
每个模块都单独封装在金属盒内,可以提高电磁屏蔽性能,降低各模块之间工作时的电磁干扰。
(2)300T车载设备双系如何工作?在软件设计上是如保障安全的?答:300T车载设备双系(A\B系)冷备,工作时只有一系上电,当工作系出现故障无法正常运行时,停车后可手动通过冗余切换开关切换到另一系再重启系统。
为了保障安全,300T车载设备采用“单硬件双软件”的设计结构,即核心控制模块(ATPCU模块、C2CU模块等)同时运行两套软件(A/B代码),这两套软件独立采集原始数据和进行运算处理,然后对运算结果进行比较,只有运算结果一致时,才作为有效输出,否则会导向安全侧,制动停车。
(3)ATPCU模块的主要功能是什么?答:ATPCU是CTCS-3核心计算控制单元,当工作在C3等级时,它接收RBC 传送的线路描述及行车许可并结合地面应答器确定的列车位置计算模式控制曲线(含静态MRSP曲线及动态MA曲线),根据模式曲线监控列车的实际速度和位置,在列车超速时进行相关干预。
当工作在C2 等级时,它负责向C2CU提供访问列车接口、制动接口、测距单元及DMI资源的通道,并监管C2CU的工作状态。
(4)C2CU模块的主要功能是什么?答:C2CU是CTCS-2核心计算控制单元,它接收地面应答器传送的线路描述并结合轨道电路信息及列车位置计算模式控制曲线,根据模式曲线监控列车的实际速度和位置,在列车超速时进行相关干预。
(5)速度距离处理单元SDP模块的主要功能是什么?答:SDP单元接收从测速测距单元(SDU)传来的原始脉冲记数,经过平滑、滤波等运算处理得到当前列车的运行方向及速度、距离数据,再将这些数据发给CTCS-3主机控制单元(ATPCU)和CTCS-2主机控制单元(C2CU)。
列控考点总结
题型:选择题、名词解释、简答题、分析题第一章1、列控的作用、功能2、列控定义、基本原理3、CTCS 分级第二章4、受力(阻力,附加阻力),状态,过程5、制动方式第三章6、闭塞方式,特点7、速度防护8、行车许可9、列控分类第四章10、应答器系统,工作原理11、列控中心,轨道编码12、C2,C3结构(车载、地面设备的组成和功能)13、RBC、移动授权计算第五章14、基于轮轴测速定位原理15、安全制动阶段第六章16、C3车载模式第一章列控的作用:1.保障行车安全(间隔控制,速度控制)2.提高运行效率(间隔控制,速度控制)3.降低人员劳动强度4.提高铁路信息化和现代化水平功能:1.给司机显示允许列车运行的信号、目标距离、目标速度、允许速度等。
2.自动实施速度控制,一旦列车速度超过允许速度,应实施制动控制,使列车减速甚至停车。
3.防止与同一轨道运行的列车相撞或追尾。
4.防止列车超过规定的限制速度运行,包括信号显示规定的限制速度、线路限速、车辆限速、临时限速等。
列控定义:列控系统由车载设备和地面设备组成,是对列车运行全过程实现运行速度、位置等状态的监督、控制和调整,确保行车安全,提高运输效率的控制系统,是高速铁路信号系统的重要组成部分基本原理:地面设备根据前方行车条件,包括轨道占用情况、进路状态、线路状况以及调度命令,生成行车许可,通过车地通信技术传给车载设备,结合列车数据,车载设备自动计算生成超速防护曲线,并实时与列车运行速度进行比较,超速后及时进行控制,防止列车超速脱轨或与前行列车追尾。
CTCS 分级:分为CTCS-0、1、2、3、4级第二章受力:总共分为三类:牵引力、制动力、阻力运动状态可分为:加速牵引、匀速惰行、减速制动基本阻力:(机械阻力和气动阻力)1.轴颈与轴承间的摩擦阻力2.车轮与钢轨的滚动摩擦阻力3.车轮与钢轨的滑动摩擦阻力4.冲击和振动引起的阻力5.空气阻力附加阻力:1.坡道附加阻力2.曲线附加阻力3.隧道空气附加阻力4.启动阻力5.其他附加阻力状态,过程:制动方式:分为摩擦制动(闸瓦制动、盘形制动)和动力制动(电阻制动、再生制动)第三章闭塞概念:行车闭塞:按照一定的规定和信号设备组织行车,对追踪列车进行间隔控制,避免列车追尾或相撞。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
列控车载设备知识串讲汇总CTCS3-300T车载设备组成、功能、使用及维护介绍(简明版)1.300T车载设备系统组成(1)300T车载设备硬件采用哪种结构设计?这种结构的优点是什么?答:300T车载设备硬件采用分布式结构设计,各模块功能相对独立,通过总线(MVB总线、Profibus总线)连接起来组成完整的车载系统。
这种分布式结构可以将模块分散放置,充分利用动车车头内有限的空间,安装方式更加灵活。
每个模块都单独封装在金属盒内,可以提高电磁屏蔽性能,降低各模块之间工作时的电磁干扰。
(2)300T车载设备双系如何工作?在软件设计上是如保障安全的?答:300T车载设备双系(A\B系)冷备,工作时只有一系上电,当工作系出现故障无法正常运行时,停车后可手动通过冗余切换开关切换到另一系再重启系统。
为了保障安全,300T车载设备采用“单硬件双软件”的设计结构,即核心控制模块(ATPCU模块、C2CU模块等)同时运行两套软件(A/B代码),这两套软件独立采集原始数据和进行运算处理,然后对运算结果进行比较,只有运算结果一致时,才作为有效输出,否则会导向安全侧,制动停车。
(3)ATPCU模块的主要功能是什么?答:ATPCU是CTCS-3核心计算控制单元,当工作在C3等级时,它接收RBC传送的线路描述及行车许可并结合地面应答器确定的列车位置计算模式控制曲线(含静态MRSP曲线及动态MA曲线),根据模式曲线监控列车的实际速度和位置,在列车超速时进行相关干预。
当工作在C2 等级时,它负责向C2CU提供访问列车接口、制动接口、测距单元及DMI资源的通道,并监管C2CU的工作状态。
(4)C2CU模块的主要功能是什么?答:C2CU是CTCS-2核心计算控制单元,它接收地面应答器传送的线路描述并结合轨道电路信息及列车位置计算模式控制曲线,根据模式曲线监控列车的实际速度和位置,在列车超速时进行相关干预。
(5)速度距离处理单元SDP模块的主要功能是什么?答:SDP单元接收从测速测距单元(SDU)传来的原始脉冲记数,经过平滑、滤波等运算处理得到当前列车的运行方向及速度、距离数据,再将这些数据发给CTCS-3主机控制单元(ATPCU)和CTCS-2主机控制单元(C2CU)。
(6)列车安全通信网关TSG模块的主要功能是什么?答:TSG是列车信号网关,用于实现车载设备Profibus总线和车辆MVB总线的协议转换,完成车载主机与DMI及列车接口之间的的数据交互。
(7)测速测距单元SDU由哪两个模块组成,它的主要功能是什么?是如何进行工作的?答:测速测距单元(SDU)包括SDU1和SDU2,它们属于热备关系,各连接一个轮轴速度传感器和一个多普勒雷达并为其提供电源。
列车运行时,SDU接收速度传感器和雷达采集的脉冲信号,并将脉冲信号转换成数字数据通过MVB 总线发送给SDP进行运算处理。
(8)安全数字输入输出单元VDX由哪两个模块组成,它的主要功能是什么,是如何进行工作的?答:安全数字输入输出单元(VDX)包括VDX1和VDX2,用于输出紧急制动并采集制动反馈。
VDX1和VDX2采用互为采集的方式进行工作,即VDX1的输出由VDX2回采,VDX2的输出由VDX1回采,只有输出和回采都正确,才判断VDX工作正常,在判断VDX异常时,系统无条件输出紧急制动。
(9)CRH3型车ATP与动车采用什么方式与列车实现接口?与列车接口相关的模块有哪些,它们是如何进行工作的?答:300T车载设备与CRH3型车之间采用MVB总线接口,由于车载设备MVB总线采用ESD+接口,而CRH3型车MVB总线采用EMD接口,需要通过MVB总线适配器(BCT)将这两种MVB总线协议进行转换,以实现车载设备与列车智能控制单元(CCU)实现通信。
车载设备通过CCU获取列车接口信息(如驾驶室状态、司机方向手柄位置、休眠信号、制动反馈等)并输出控制命令(切牵引、制动、过分相等)。
(10)应答器传输模块BTM的主要功能是什么?答:BTM单元主要功能是通过应答器天线(CAU)实现对应答器信息的接收,并将接收到的1023位应答器报文进行校验解码,转换为830位的有效消息后发送给CTCS-3主机单元(ATPCU)及CTCS-2主机单元(C2CU)。
(11)轨道电路读取器TCR的主要功能是什么?答:TCR主要功能是通过TCR天线接收轨道电路信息(载频、低频及过绝缘节信息)并将该信息通过RS422接口传送给CTCS-2主机单元(C2CU),同时根据C2CU发送的锁频命令进行轨道电路载频接收锁定。
(12)安全无线传输系统(STU-V)由哪几部分组成,它们的主要功能是什么?答:STU-V负责对车载设备与地面之间传送的无线数据进行加密和安全传输,由一个COMC和一个GCD组成,其中COMC负责数据的安全传输,GCD负责数据的加密/解密。
(13)车载电台的主要功能,它的两个MT是如何进行工作的?答:车载电台的主要功能是注册GSM-R网络并通过该网络使得车载设备与地面RBC之间建立通信会晤,以实现车载设备与RBC之间的数据交互。
车载电台包括两个移动终端(MT),两个MT在上电后均注册到GSM-R网络且在运行中一般只有一个MT与RBC建立连接,只有在进行RBC移交时,处于空闲工作状态下的另一个MT呼叫并与下一个RBC(接收RBC)建立连接,当列车(最小安全末端)越过RBC切换边界后,原来工作的那个MT与它连接的RBC(移交RBC)断开连接,此后处于空闲工作状态以备进行下一次RBC移交处理。
(14)司法记录单元(JRU)的主要功能是什么?答:JRU主要用于记录车载设备运行过程中的司法数据,以便进行故障分析及事故责任界定。
记录数据包括:车载设备采集的列车接口信息、制动反馈信息、司机对ATP的操作信息、接收到的RBC消息、收到的地面应答器数据、轨道电路信息,向外输出的切牵引、制动、过分相、DMI警示信息以及车载设备的工作状态、日期时间等。
车载JRU记录数据可以进行下载分析。
(15)人机界面(DMI)的主要功能是什么?答:DMI主要用于向司机显示车载设备的控制信息及警示信息并为司机操作提供人机接口。
控制信息及警示信息包括:速度信息、距离信息、工作状态信息、线路条件信息、司机干预提示信息及设备故障报警信息。
司机操作包括:列车数据输入或确认、等级或模式选择、上下行载频选择、信息或警惕确认及缓解制动。
(16)300T车载设备的冗余开关和隔离开关的功能是什么,冗余开关的“0”位与隔离开关的隔离位有什么不同?答:300T车载设备的冗余开关用于切换车载设备的工作系(A/B系),它有3个档位,“1”位用于选择A系工作,“2”位用于选择B系工作,“0”位用于将两系都掉电。
隔离开关用于将ATP的制动输出旁路掉,它有两个档位,“1”位选择ATP控车,“2”位旁路ATP的制动输出。
虽然冗余开关的“0”位和隔离开关的“2”位都能使ATP掉电,但是它们的作用不同。
冗余开关处于“0”位时,ATP无条件输出制动,这时不能移动列车;而隔离开关处于“2”位时,ATP输出的制动被旁路,这时可以移动列车。
(17)300T车载设备哪几个模块的硬件结构是完全一样的?答:300T车载设备的ATPCU模块、C2CU模块、SDP模块和TSG模块的硬件结构完全一样,可通过烧写不同的软件实现不同的功能,便于设备更换及维护。
(18)两个DMI能否同时上电?答:两个DMI工作时属冷备关系,即工作时只能一个DMI上电。
若同时上电,ATP将不能成功启动,需要关掉一个DMI电源后重启ATP设备。
2.车载设备工作原理及基本功能(1)C3车载设备主要有哪几种工作模式?分别是什么?其中哪几种是C2专有的控制模式?答:C3车载设备有9种工作模式:待机模式、完全监控模式、部分监控模式、目视行车模式、调车模式、引导模式、休眠模式、机信模式和隔离模式,此外还有冒进和冒进后两种工作状态。
9种模式中部分监控模式和机信模式为C2专有的控制模式。
(2)在正常情况下,ATP最常采用哪种模式控车?答:正常情况下ATP最常采用的控车模式是完全监控模式。
当车载设备具备列控所需的全部基本数据(包括列车数据、行车许可和线路描述)时,列控车载设备生成目标距离连续速度控制模式曲线,并通过DMI显示列车运行控制及警示信息,监控列车安全运行。
(3)在完全监控模式下,C3和C2监控的允许速度分别是多少?答:目前在完全监控模式下,C3监控的最高允许速度是310km/h, C2监控的最高允许速度是300 km/h。
(4)在完全监控模式下,C3和C2监控的距离分别是多少?答:在完全监控模式下,C3监控的最远距离约为30公里(30组链接应答器的距离),C2最远监控的距离是7个闭塞分区,大约14公里左右。
(5)车载设备告警、输出最大常用制动和紧急制动的速度是如何设置的? 答:在顶棚速度监视区(CSM区),当列车速度超过允许速度2公里时,ATP 发出超速报警音,;当列车速度超过允许速度5公里时,ATP输出最大常用制动;允许速度低于或等于250km/h且列车速度超过允许速度10公里时ATP输出紧急制动,如果允许速度高于250km/h且列车速度超过允许速度15公里时ATP输出紧急制动。
在目标速度监视区(TSM区),报警速度为允许速度加2km/h,常用制动及紧急制动干预速度根据目标距离模式曲线计算确定。
(6)机控优先和人控优先分别有什么特点?答:机控优先工作模式下,在TSM区时,车载设备在列车速度超过最大常用制动干预曲线前,自动控制输出弱常用制动或中常用制动对列车进行平缓的减速,输出的常用制动在列车速度低于允许缓解速度时自动缓解。
人控优先工作模式下,车载设备在不干扰司机正常驾驶的前提下,实时监控列车安全运行,只有当列车速度超过最大常用制动干预曲线时,车载设备才控制输出最大常用制动,在列车速度低于允许缓解速度时,语音提示司机进行手动缓解。
无论机控优先还是人控优先,车载设备输出的紧急制动必须在停车后由司机手动缓解。
(7)在什么情况下ATP会进入部分行车模式?答:启动ATP并以C2等级发车时,车载设备接收到地面允许信号但缺少应答器提供的线路数据,此时按压启动键可以C2部分模式运行。
在C2等级完全监控模式下运行时,由于缺少前方进路数据,在车载存储的线路数据耗尽时转为部分行车模式。
(8)以部分监控模式侧线发车,ATP收到UU码时,ATP的允许速度是多少?收到UUS码时,ATP的允许速度是多少?答:在部分监控模式下,如果ATP收到UU码时允许速度为45km/h,收到UUS时允许速度为80km/h,收到UU后又收到UUS时,司机负责在车尾也进入UUS区段后再按允许速度80km/h行车。
C2等级下,在区间轨道电路故障或进/出站信号没开放时,ATP收到地面停止信号,这时要越过故障的轨道区段或关闭的信号,经调度允许,可以停车选择目视行车模式。