kdl16变频器驱动解释
S1-EL-11-E04 KDL16驱动系统新编教材

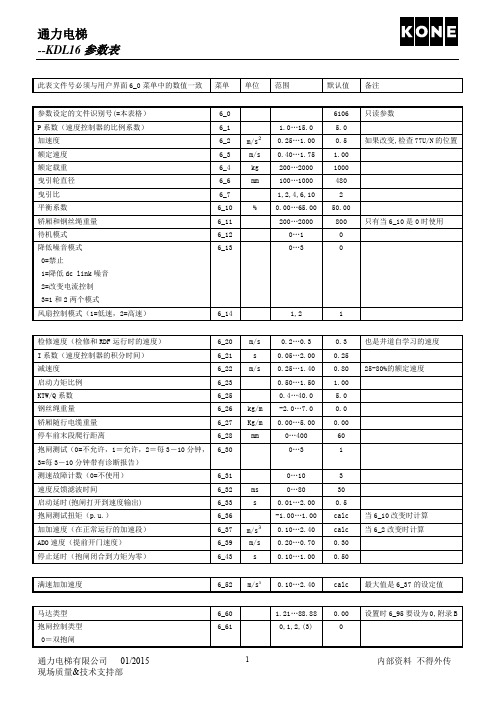
课程描述目录1.KDL16熟悉部件 ................................................... - 3 -1.1 KDL16驱动简介............................................. - 3 -1.2 KDL16L部件介绍............................................ - 4 -1.3 KDL16R部件介绍............................................ - 6 -2 KDL16称重调试 ................................................... - 8 -2. 1称重概述................................................ - 8 -2. 2调节称重装置LWI ........................................ - 8 -2. 3 调节称重装置(LWD+LCEVTC) ............................... - 9 -3 KDL16Encode.Resolve极性检查 .................................... - 10 -4 KDL16接地.屏蔽线检查 ........................................... - 11 -5 KDL16接线检查完好 .............................................. - 12 -6 KDL16了解各电子版的输入输出信号.指示灯等 ....................... - 17 -1.KDL16熟悉部件1.1 KDL16驱动简介KDL16驱动是目前推出的一种改进型驱动,它可以替换原来的V3F16L驱动,可以用在Monospace,Xminispace,Sminispace等梯型上,该类驱动又分KDL16L及KDL16R 两种,根据不同的电梯参数可以配用不同的KDL16驱动类别,KDL16L与V3F16L外形非常相似.要注意的是该类驱动不能使用原来的Tacho测速发电机而只能使用专用的编码器。
KONE_KDL16参数

本页文件的编号必须与 UI 菜单 6_0 报告的编号一致。
文件标识 - 文件标识的设置参数(= 本页)
UI 菜单 单位
6_0
范围
备注
6100 只读
电梯参数 - P 系数 (速度控制器比例增益) - 加速度 (在正常模式下,还可以确定跳动) - 额定速度(电梯速度) - 电梯负载 - 曵引轮直径 - 绳比 - 平衡 (0 = 无对重) - 轿厢与轿架质量 -节能模式 (0=禁止,1=启用)
注意! 电梯测试仅对一次性启动有效。
电动机数据 - 电动机电源电压 - 电动机额定电流 - 电动机定子额定频率 - 电动机额定转数 - 电动机额定输出功率 -电动机定子的电阻 - 电动机定子的电抗 - 电动机 id 电流比
永久性存储 - 参数锁 (0=开, 1 =锁) - 软件版本
- 默认参数 1=默认加载参数
只有当电动机 NTC 连接时才有
断电次数
V V m/s
PU 电梯额定力矩 PU 电梯额定力矩
版权©2009 通力公司,版权所有。 第3页,
温度: 40. 散热片 41. DCBM-CPU 板 45. 电动机
监测/次数: 61. 驱动模式 62. 通电计时器 63. 断电计数器 65. LWD 输入值
其它信号 110. 总线直流电压 111. 电动机电压 203. 速度误差 208. 力矩前馈参考 209. 速度控制器力矩参考
单位
m/s m m -
6_68
A
10.0 , …, 100.0 0.0
6_69
A
10.0 , …, 100.0 0.0
6_70
0 , …, 1
默认 0
参数 6_86 和 6_87 在测试后更新。参数 lock (6 95) 须设置为0
KDL16维修培训

KDL16 L KDL16 L维修培训维修培训通力电梯有限公司苏州分公司张亮亮20112011--0909--161KDL16 L KDL16 L介绍介绍培训资料,仅供参考培训资料,仅供参考序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板8DC+ BR外部制动电阻9M马达DCBL (drive control board for low DCBL (drive control board for low--riseelevator)培训资料,仅供参考KDL16 L有一个驱动控制板DCBL既385:A1,它可以处理LCE和即将到来的KCE系统的连接。
MCDK (main circuit and driver board)培训资料,仅供参考MC16 (filter board)培训资料,仅供参考MC16滤波板可以隔离输入电源的EMC噪声,防止不必要的干扰。
MC16也有过电流功能,可以保护直流母线充电电路。
VRB (varistor board)培训资料,仅供参考CO16 (contactor board)培训资料,仅供参考KDL16 LKDL16 L驱动的结构驱动的结构BCK (brake control board)培训资料,仅供参考BCK制动控制电路板可以分别打开两个抱闸制动器,序号注释2MX-Encoder编码器用来替换测速发电机3培训资料,仅供参考BCK制动适配电缆4不适用5LWD接口适配电缆6备用电池电缆7热敏适配器电缆KDL16 L套装可以用来替换V3F16L连接驱动模块培训资料,仅供参考KDL16驱动的接地规范培训资料,仅供参考机械操作简介当更换驱动模块时,同时将测速计更换为编码器。
KDL16_6106参数表
0
参数 6_95 需要设置为 0.
6_99
0,1
0
附件 A
实时显示的信号(6_75 选择) 速度和位置: 1 电梯速度 5 电梯位置 7 到下一层的距离 14 井道中点 15 井道信号 m/s m m m 0:在中点之下,1:在中点之上 每个点表示一个信号从 XL1 界面去到驱动。 1=信号动作,0=信号没有动作 第 1 个点 (61N) 第 2 个点 (61U) 第 3 个点 (77S) 第 4 个点 (77N) 第 5 个点 (77U) 驱动控制 20 参考速度 23 马达力矩 25 马达电流 27 KTW/Q 估值 29 马达编码器的脉冲数 30 马达平均电流 31 马达功率 32 ECB-1 状态 33 驱动输出频率 34 电梯速度来自马达频率 温度 A - PPR A KW Hz m/s 马达转一圈的脉冲数 负值意为马达在发电机状态 负值意为马达在发电机状态 0:没连接,1:已连接,2:正运行,3:故障 负值意为马达在发电机状态 m/s 上行正值,下行负值 在底层时显示 0.00m 单位 备注
6_20 6_21 6_22 6_23 6_25 6_26 6_27 6_28 6_30
m/s s m/s
0.2…0.3 0.05…2.00 0.25…1.40 0.50…1.50 0.4…40.0
0.3 0.25 0.80 1.00 5.0 0.0 0.00 60 1
也是井道自学习的速度
25-80%的额定速度
通力电梯有限公司 01/2015 现场质量&技术支持部
3
内部资料 不得外传
通力电梯 --KDL16 参数表
40 变频器温度 41 DCBL 板温度 45 马达温度 监控/计时 61 驱动模式 62 上电时间 63 关电计次 65 LWD 输入值 附加信号监控 110 DC 侧电压 111 马达电压 203 速度误差 208 力矩前馈参考值 209 速度控制器力矩参考值 V V m/s - h - mA 关电的次数 0=待梯,1=正常,2=检修,3=校正,4=再平层,5=减速度 ºC ºC ºC NTC 时适用
2016 SEB技术能力评估笔试 (S2)-3(2)

A.
BCX07
C.
BCB25
B.
BCX08
D.
BCM25
55
下列描述KDM驱动正确的是:
()
A.
KDM不需要制动电阻放电
C.
KR模块不包括抱闸控制模块
B.
KDM可以把回馈制动的电能返到电网中去
D.
电源模块内的IGBT等,我们现场可以更换
56
目前我们使用的KDM中,DCBG的24供电电源来源于
()
13
通力标准钢丝绳防跳杆,防夹手与钢丝绳的间隙为。
()
A.
2~3mm
C.
3~6mm
B.
2~4mm
D.
3~5mm
14
在测量电梯补偿钢丝绳张力时轿厢应停靠在什么位置进行测量
()
A.
井道顶端进行测量
C.
井道1/3高度进行测量
B.
井道2/3高度进行测量
D.
井道底端进行测量
15
MX14马达只具有编码器时适用于通力的哪种驱动
80mm / 110mm
10
客梯的垂直方向振动应不大于;水平方向振动应不大于。
()
A.
20cm/s2/ 10cm/s2
C.
25cm/s2 / 10cm/s2
B.
25cm/s2/ 15cm/s2
D.
30cm/s2 / 15cm/s2
11
防护栏横档间距的跨度应不大于。
()
A.
450mm
C.
550mm
B.
B.KM921317G02DKM921317G04
53KDM驱动系统由以下组成:()
A.KDA和LCEC.KDA和驱动电源模块
电控柜调试参数KDL16
亮 在加速时,速度>0.1 m/s 在减 速时,速度>0.3 m/s 两个主接触器中任一闭合 (201:1, 202:2) 从 LCECPU 来的主接触器闭 合命令有效 所有厅门关闭 轿门关闭 关门命令有效 需要驱动 DRV 板无故障 安全回路正常
2.7.2 检查编码器极性
在 RDF 模式下驱动电梯上行,若主机不是逆时针转动,则需更改驱动参数 6-65(例如将 1 改成-1), 然后进行重复测试。
13
KDL16 电控柜调试参数表
G8000006/A 共 74 页 第 74 页
3.快车调试
3.1 井道自学习(5-2-1)
步骤 1 2
3 4 5
2.3 检查轿顶板拨码开关位置是否正确
1 FORCE LIM. A
2 OPEN END A
3 CLOSE END A
4
5 FORCE LIM. B
6 OPEN END B
7 CLOSE END B
8
2.4 修改 CPU 参数
参数号
初始值
1-2
3
1-12
1
1-13
1
1-18
3
1-24
0
1-42
0
1-43
G8000006/A 共 74 页 第 74 页
2. 慢车调试 2.1 控制柜接线说明 使用测试台时接线: 1.主电力线 1:L1,L2,L3,PE 接控制柜 L1,L2,L3,PE, L 接 501,N 接 502。 2.主电力线 2:U,V,W,PE 一端接控制柜 U,V,W,PE,另一端接曳引机 U,V,W,PE 3.抱闸线:XBR4。 4.热敏电阻:XT1。 5.编码器线:XMEN5 6.测试台的各个接插件接到控制柜和轿顶检修盒的相应位置。 7.随行电缆的接插件按标识接在 LCECPU、LCEDRV 盒 LCECCB 的相应位置。 8.将轿顶接线盒内的电池连线 XB32 接到 CCBS 的 XB32,在测试结束后应拔下。 2.2 SASS 设备使用说明 1. XB26 为下强迫信号(77:N),XB25 为上强迫信号(77:U)。 2. XB21(30)/XB23(61:U)/XB24(61:N):
通力称重及舒适感调试步骤(使用于KDL16,32,KDM驱动)

一,电梯置RDF,清空轿厢:1)绳头称重步骤1,将LWD setup (6_74) 参数设定为-2。
2 ,将Save (6_99) 参数设定为1。
选 5 _1 _,L _ _ (xx, 表示负荷百分比)3,转动LOP- CB板或LCEVTC上的OFFSET电位计,直至屏幕上显示数字0。
L _ _ 02),轿底称重步骤1 ,选择LWD setup(6_74)参数设定为-1 ,2,设(6_75)参数为65(LWD输入值)。
检查值是否在6-8之间。
如果值为0 => 传感器未连接或间隙太宽,如果值太高=> 检查LWD 传感器。
3,按6_74_0,确认二,电梯加入50 %载荷:1),绳头称重步骤1,用LOP-CB板或LCEVTC上转动GAIN电位计。
2, 5 _1 _显示L _ _ 502),轿底称重步骤1,6_74输入50确认,检查值是否在10-15间。
2,将Save(6_99)参数设定为1三,设(6_75)参数为14(井道中间点,之上1,之下0),电梯置正常,井道中间楼层,上下运行,钳形电流表测变频器前端一相电流,增减对重数,确保轿厢上行电流比下行大一点(尽量不超1.A),以保证45—50%平衡系数的要求,记下上下中间电流值。
四,电梯拿出10 %载荷,做40%载荷上下运行,记下上下中间电流值,确保轿厢上行电流比下行尽量小。
五,电梯置RDF加到100 %载荷:两种称重,6_74输入103确认,将Save(6_99)参数设定为1保存,以保证满载再加入75kg超载。
(灯闪,声响)六,设(6_75)参数为27,( KTW/Q 估算,影响平层精度和停梯舒适感),电梯顶底楼快车各运行一次,读数记平均值到6-25中。
(6_25 0.4 , …,11.0﹛100%负荷(顶+底)/2﹜默认 4.0),记下满载上下中间电流值。
七,改- P 值 (速度控制器比例增益)6_1 默认5.0=>1.5;- 启动延时(制动打开命令 -> 速度参考值)6_33 s 默认0.35=>…,2.00,1)电梯拿出50 %载荷,留50 %载荷,准备做舒适感。
KDL16调试培训课程

6
2020/5/4
KDL16驱动结构
KDL16驱动端口接线
XMEN5:编码器端口 XW1:称量装置端口 XBAT1:备用电池端口
XL1:通讯端口 XT1:热敏电阻端口
XS3:安全回路板信号端口 T1 T2 T3:输入电源端口 U V W:输出电源端口 XBRE2:制动电阻端口
KDL16小机房控制柜
1 m/s(电梯额定速度) kg(电梯额定载重) mm(曳引轮直径) 0.25(提前开门速度)
88.88 1(抱闸类型)
8192 120(电机极限工作温度) V(电机反电动势) A (电机额定电流) Hz (电机额定频率) r/min(电机额定转速) Kw(电机额定输出功率) Ω(电机定下方。
77N
18 2020/5/4
KDL16—井道信号
77U/77N 注意:上下强迫减速磁开关 被安装时需保证磁开关与 塑胶磁条正垂直,并且磁 开关与塑胶磁条的垂直间 距在5-10mm
19 2020/5/4
KDL16—机房
1=编码器线 2=抱闸控制电缆 3=主机电源线 4=热敏电阻电缆
1 2
16 2020/5/4
KDL16—井道信号
30/B30/61U/61N • 安装后必须保证挡板支架牢固地固 定在导轨上,竖直方向上不松动。 隔磁板与U型磁开关之间的相对位置
必须严格按照右参照图所示。 然后按此方法装好每一楼层的挡板
17 2020/5/4
KDL16—井道信号
77U/77N
1
22 2020/5/4
KDL16-调试
1. 编码器方向确认
RealTimeDisplay monitor
1
selection (6_75)选择1(实
通力电梯故障分析
不同型号的电梯是不一样的!至少3000的电梯6菜单和楼主说的是不一样的!但也不是全不一样!6-20是P增益6_1 是马达型号6_2是额定速度6_3 额定载重量6_5是传感器比参数太多不一样了!改天一有空一起发上来好了!那些电梯用的是默纳克系统羚木,菱王,申龙,东南,多美适很多,国产品牌和国际品牌低端的都用默纳克一体机系统个人感觉还是不错的,现在有好多电梯厂家都再用默纳克针对某些厂家有特殊的通讯协议,外呼板程序有的是不通用的我有2台新的nice3000一体机,并联,出现如下问题1.机房打检修后,轿顶检修不能运行。
无故障码。
2.轿顶检修运行后,退出,转正常,电梯不动,到机房断电送电,电梯返平层后正常。
无故障码。
3 运行中,偶尔出现内选莫名消号,外招数显不变的现象。
请老师指点一下。
1.机房检修后,轿顶打检修不能运行,首先要看输入点X9是否动作,一般厂家检修公端信号输入都是用的X9,如果输入点的灯在检修与正常间转换时有变化说明信号没有问题,反之则不行!另外提醒,之前不少厂家都是轿顶与机房的检修是互锁的。
2.轿顶检修转正常不返平层。
有个功能(检修转正常必须门锁断开一下)在F6-11里面,如果设置了单单检修转正常是不会返平层的,而你去下电再上电其实就是等于门锁断开一次,下次如再遇此情况,可以看操作器上显示的速度,如果检修转正常了但面板显示的速度还是0.25,那么就是还在检修状态,返不了平层,试试将门锁断开再合上!3.外招及内招销号,只有在故障时或反向时消号,正常情况下只有双击消号,不会自然消号的,这个时候你要看看指令分配板是否进过水了。
另外看下FC组的故障代码里是否有E51出现,因为是并联的,CAN通讯上可能会存在点问题,但这个故障是会自动消号的,电梯运行故障出来时指令就会消号,外招显示不变的情况就要检查接地,干扰了,是某一层还是所有的楼层?不知道这些对你有没有帮助!通力3000小机房电梯消防运行怎么取消啊...现在电梯打了消防后,电梯返1层开门,进入轿厢后选择楼层按关门键电梯就运行了...怎么改成电梯消防动作后返1层开门就不运行了内选也不能使用是不是修改1-62消防类型参数, 我改了可是不能用, 参数原始是5, 我改成1和6都试过,但是不行1-62改为0才是关闭消防的选项.电梯的消防有两种模式:一种叫消防运行,第二种叫做消防迫降.消防运行是特点是:1,消防运行的开关一般安装在电梯的一楼位置.2,消防开关运作后电梯会自动返回基站,然后开门,可以手动开关门,并且内呼有效.3,消防运行接线在消防板上的1和10两根线上.消防迫降的特点:1,消防迫降的开关一般在监控室,与小区或是楼域的消防联动在一起.2, 消防迫降动作后电梯会自动返回基站,之后停止服务.3,消防迫降接线在消防板上2和9两根线上.我有一台小机房梯子,有时会报0095在某层开门不运行,轿顶机房检修均不动,关电后送电正常,怎么破?0095是告诉你你那层的厅门打不开!或是厅门锁短接,建议你先调整故障出现的那层厅门门锁.那种VF25L那种KONE 可以换成威科光幕不是怎么样接信号线以前听人家说要改线不知道是不是将外接的光幕的信号点接在门机板的输入点和0V就行了!这个只要注意看下图纸就知道了我有1台12层的通力电梯经常在1楼与3楼(没有2层的)之间死机困人,查看主板故障码最多的是0108,0170,0021,其中0108出现了14次。
KDL16驱动系统教材

通常最好尽可能高的设定此值。电动机会有振动和噪声。轿厢不能平层。再平层时可能有跳跃现象。
再平层问题。以0.05的增量改变I factor (6_21)的参数值。轿厢不能平层。
可以减小振动 可能导致电动机内出现噪音。
e 将Motor id current ratio(6_88)参数设定为-15。
f 将6_52 full speed jerk 参数设定为0.60。
g 设定速度6_3 参数
h 设定载重6_4 ຫໍສະໝຸດ 数 i 设定Roping6_7参数
j 将Save6_99参数设定为1存储参数.
k 关闭电源。至少等待15秒。该操作可确保正确存储这些参数。
8.将轿厢驱动到电梯井道顶部的适当高度上并用闭锁装置锁定, 打开制动器并等待,直到称重显示稳定。关闭制动器,几秒后再次打开,以确保释放掉所有的张力,读取 50 % 负载时的值并记录下来.
二,安装KDL16驱动模块
KDL16更换继电器,接触器.
如果KDL16驱动器中接触器板CO16中接触器201明显粘死或损坏,可以直接打开驱动装置外盖,更换接触器板CO16或处理相应接触器问题.
可能导致其它振动 逐步改变6_32(速度反馈滤波时间)的参数值。
改变此参数的目的主要是避免编码器信号受干扰。轿厢不能平层。
可能导致超速。改变KTW/Q factor(6_25)的参数值。轿厢不能平层。
轿厢移动不符合速度曲线。
轿厢平层时跳跃。再平层问题。
KTW/Q 因数(100 %负载)
将轿厢驱动至底层。切换至RDF模式。将6_75选定为27(KTW/Q估计)禁止开门和层站呼梯。关闭 RDF模式。以额定速度将轿厢从底层驱动到顶层,结束整个运行后记录LCECPU(375)的值。以额定速度将轿厢从顶层驱动到底层,结束整个运行后记录LCECPU(375)的值。切换至RDF模式。根据下面的算法设定KTW/Q factor(6_25)参数:KTW/Q factor =(在顶层时 LCECPU(375)的显示值+ 在底层时 LCECPU(375)的显示值)/ 2。将Save (6_99)参数设定为1。
变频器主电路工作原理

变频器主电路工作原理标题:变频器主电路工作原理引言概述:变频器是一种用于调节交流电动机转速的设备,通过改变机电输入的频率和电压来实现调速。
变频器主电路是变频器的核心部份,其工作原理对于了解变频器的运行机制至关重要。
一、电源输入1.1 变频器接收来自电网的三相交流电源。
1.2 电源通过整流器将交流电转换为直流电。
1.3 直流电通过滤波电路去除波动和噪音,保证电源稳定。
二、逆变器2.1 逆变器将直流电转换为可变频率的交流电。
2.2 逆变器采用晶闸管、IGBT等元件进行电压和频率的调节。
2.3 逆变器通过PWM技术控制输出波形,实现对机电转速的精确调节。
三、控制电路3.1 控制电路接收用户设定的转速信号。
3.2 控制电路根据设定值调节逆变器输出频率和电压。
3.3 控制电路监测机电运行状态,保证机电安全稳定运行。
四、保护电路4.1 保护电路监测电流、电压和温度等参数,保护机电和变频器不受损坏。
4.2 保护电路在浮现故障时自动切断电源,避免事故发生。
4.3 保护电路通过显示屏或者报警器提示用户故障信息,便于维修和排除故障。
五、反馈回路5.1 反馈回路监测机电转速和输出功率。
5.2 反馈回路将实际运行情况反馈给控制电路,实现闭环控制。
5.3 反馈回路可以根据实际负载情况调整输出频率和电压,提高系统效率和稳定性。
结论:变频器主电路是变频器的核心部份,通过电源输入、逆变器、控制电路、保护电路和反馈回路的协同作用,实现对机电转速的精确调节和保护。
深入理解变频器主电路的工作原理,有助于提高设备的运行效率和可靠性。
KDL16R调试说明-1-1
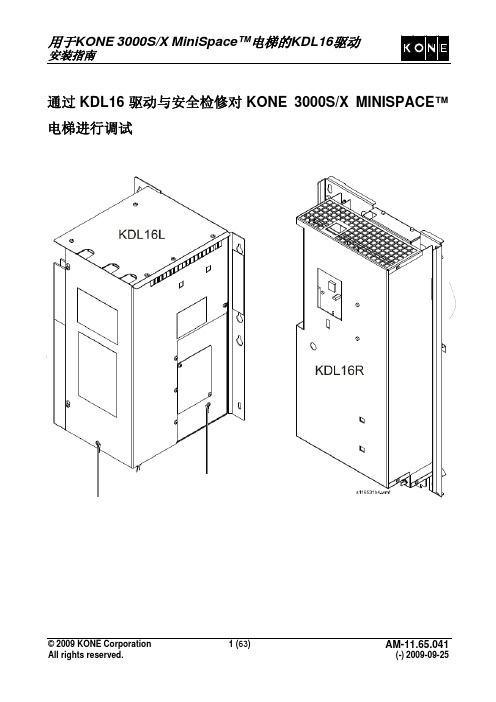
通过KDL16驱动与安全检修对KONE 3000S/X MINISPACE™电梯进行调试说明:提供本文档的中文版本仅为了便于理解。
KONE Corporation 及其分公司和相关公司、各级主管与员工及事务代理机构对译文中可能存在的任何差错不承担任何责任。
建议参考 KONE Corporation 的英文原版文档。
目录1 简介 (5)本指南的有效性 (5)1.1缩写 (5)1.21.3相关文件 (6)2 安全 (7)一般工作安全措施 (7)2.12.2安装方法的安全性 (8)3 工具 (10)4 组件介绍 (11)驱动模块 (11)KDL16L4.1驱动模块 (12)4.2KDL16R带KDL16驱动的控制柜 (13)4.3曳引机铭牌 (15)4.4如何使用实时显示功能 (16)4.5阅读详细故障代码 (17)4.65 驱动检修调试 (18)调试施工期电源 (18)5.1前提和准备工作 (19)5.25.3设定参数 (23)检查电动机方向和编码器的极性 (25)5.46 额定速度的调试 (26)调节称重装置 (26)6.1井道设置 (29)6.2复位LCE参数 (29)6.37 微调 (30)检查轿厢和对重平衡(50 %负载) (30)7.1最后检查轿厢和对重平衡(电气)(50 %负载) (30)7.2对LWD操作进行微调 (31)7.3速度控制驱动调整的提示 (32)7.4KTW/Q因数(100 %负载) (33)7.5起动 (34)7.6急动或倒拉 (34)7.77.8最后爬行距离 (37)Pfactor和I factor (37)7.98 安全检修 (38)标准和规程 (38)8.1安全 (38)8.28.3前提条件 (39)轿厢内0 %负载时的安全测试 (39)8.4轿厢内50 %负载时的安全测试 (46)8.5轿厢内100%负载时的安全测试 (48)8.6轿厢内 125%负载时的安全测试 (50)8.7轿厢内0 %负载时的最后安全测试 (52)8.89 批文与版本记录 (58)附录A. 返回初始设定 (59)附录B. KDL16L连线 (60)附录C. KDL16R连线 (62)1 简介1.1 本指南的有效性本指南适于在下述电梯配置中对KDL16驱动的操作进行调试、安全检修和测试。
kdl16变频器驱动解释

培训资料,仅供参考驱动介绍V3F16ES 驱动原理:acdc.wmfACDCACDCMTr s tFilterL1L2L3V3F16es moduleElectronicsDynamic brakingMotor supply 0...300VAC 0...20 HzIntermediate circuit530...700 VDCMains supply 380...415 VACV3F驱动系统培训资料,仅供参考V3F16es 驱动介绍1/2组成:•385:A1 Drive Control Board (DCB) 驱动控制板•385:A2 Main Circuit Board (MCB) 主回路板•385:A3 Brake Control Board (BRK) 抱闸控制板•385:A4 Intermediate Circuit Board (IMC) 中间电路板•主接触器201:1,201:2,204(动态制动)•过滤器•充电电容385:C1,C2•充电电阻385:R1,R2(1k, 50w)V3F16es驱动介绍2/2内部结构培训资料,仅供参考V3F16L驱动介绍1/3驱动原理图培训资料,仅供参考V3F16L驱动介绍2/3制动电阻V3F16L驱动SEP井道控制柜KONE 3000 MonoSpace® 与KONE 3000 TranSys™ 控制柜分为两个部分一部分放到井道中,称为SEP-井道控制柜,另外一部分在顶层层门旁,称为MAP-维修操作盘培训资料,仅供参考V3F16L驱动介绍3/3 V3F16L 驱动模块组成:1. 制动器, XBR32. LCE电缆,XS33. 马达电缆,U-V-W4. 供电电缆,T1-T2-T35. LWD及马达电流,XW16. MAP测速计,XLG17. 测速计,XG18. LCECPU电缆,XL1 9.马达热敏,XT110. 制动电阻,XBRE211. 盖板12. 盖板连线13. 电缆套管孔培训资料,仅供参考V3F18/25驱动介绍1/3原理图:培训资料,仅供参考V3F18/25驱动介绍2/3V3F18驱动组成:1.制动控制模块385:A52.PCB模块385: A1, A23.电流测量板385:A34.主接触器201:1,2 & 辅助继电器 & 保险2985.直流电路电容器385:C1,C2,(C3,C4)6.EMC模块3897.变压器T18.风扇3039.动态制动接触器20410.大功率晶体管385:V1 (V3)11.三相整流桥385:V512.制动三极管385:V4培训资料,仅供参考V3F18/25驱动介绍4/3V3F25驱动组成:1.HCB:运动控制板385:A12.逆变器板385:A23.电流测量板385:A34.风扇3035.变压器896.中间直流电路电容器385:C1,C2,(C3,C4)7.大功率晶体管385:V1 (V3)8.制动三极管385:V49.二极管整流桥385:V510.(内部)制动电阻306。
巨人通力KDL16介绍(基本知识及调试)

1:77N磁开关
2:77U磁开关
3:塑胶磁条(80*20*12mm)
Speed
C
3
2
m/s
77U/77N
1.0
1200mm
1.6
2700mm
1
1.75
3000mm
注意:必须保证下强迫减速磁开关
77:N(XB26)对应的塑胶磁条白色部
分(S极)在上方,而上强迫减速
磁开关77:U(XB25)对应的塑胶磁条
24 2020/5/5
KDL16—机房接线
变频器KDL16L
KDL16—机房接线
变频器KDL16R
26 2020/5/5
KDL16—无机房接线
变频器-SEP柜
KDL16-调试
参数确认 1-95 0 6-3 1.60 6-4 800 6-6 400 6-39 0.50 6-60 0.00 6-61 0 6-64 0 6-67 100 6-80 0 6-81 0.0 6-82 0.0 6-83 0 6-84 0.0 6-86 6-87 6-99 0
KDL16 Training
Platform-KDL16
configuration:
SMLBCECPU40
KDL drive
KDL16R
KDL16L
Gearless motor
3
2020/5/5
Platform-K series
configuration:
SMLBCECPU40
SIEI drive
29 2020/5/5
KDL16-调试
1. 编码器方向确认
RealTimeDisplay monitor
1
selection (6_75)选择1(实
KDL16维修培训

KDL16 L KDL16 L维修培训维修培训通力电梯有限公司苏州分公司张亮亮20112011--0909--161KDL16 L KDL16 L介绍介绍培训资料,仅供参考培训资料,仅供参考序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板8DC+ BR外部制动电阻9M马达DCBL (drive control board for low DCBL (drive control board for low--riseelevator)培训资料,仅供参考KDL16 L有一个驱动控制板DCBL既385:A1,它可以处理LCE和即将到来的KCE系统的连接。
MCDK (main circuit and driver board)培训资料,仅供参考MC16 (filter board)培训资料,仅供参考MC16滤波板可以隔离输入电源的EMC噪声,防止不必要的干扰。
MC16也有过电流功能,可以保护直流母线充电电路。
VRB (varistor board)培训资料,仅供参考CO16 (contactor board)培训资料,仅供参考KDL16 L KDL16 L驱动的结构驱动的结构BCK (brake control board)培训资料,仅供参考BCK制动控制电路板可以分别打开两个抱闸制动器,序号注释2MX-Encoder编码器用来替换测速发电机3培训资料,仅供参考BCK制动适配电缆4不适用5LWD接口适配电缆6备用电池电缆7热敏适配器电缆KDL16 L套装可以用来替换V3F16L连接驱动模块培训资料,仅供参考KDL16驱动的接地规范培训资料,仅供参考机械操作简介当更换驱动模块时,同时将测速计更换为编码器。
T1-EL-11-E16 KDL16驱动系统介绍 rev1
课程描述课程编号: T1-EL-11-E16课程名称: KDL16驱动系统介绍课程内容: 1.KDL16部件了解2.KDL16驱动单元输入输出线检查3.KDL16Encode、Resolve极性测试4.KDL16接地、屏蔽线检查5.KDL16了解各电子板的输入输出信号、指示灯等6.KDL16常见故障处理。
7.KDL16更换接触器、继电器。
8.KDL16参数设置9.KDL16慢车调试10. KDL16称重调试11. KDL16快车调试课程对象:通力工作半年以上,对通力电梯较为熟悉且有相当电气基础通过培训能对KDL16驱动有系统了解,并能了解故障处理课程目标:及基本调试方法所需设备: 投影仪、白板、实物推荐课时: 课堂: 8 h 现场实践: 4 h更新人:田书强审核人:David Chung更新日: 2011.5.14 审核日期:29 May 2011目录第1章KDL16部件了解 ....................................................................................................................... - 2 -1.KDL16简介 ............................................................................................................................... - 2 -2.KDL16L部件介绍...................................................................................................................... - 3 -3.KDL16R部件介绍...................................................................................................................... - 4 - 第2章KDL16驱动单元输入输出线检查............................................................................................ - 6 - 第3章KDL16Encode.Resolve极性测试............................................................................................ - 6 - 第4章KDL16接地.屏蔽线检查.......................................................................................................... - 8 - 第5章KDL16了解各电子板的输入输出信号、指示灯等................................................................ - 9 - 第6章KDL16常见故障处理.............................................................................................................. - 10 - 第7章KDL16更换接触器.继电器.................................................................................................... - 10 - 第8章KDL16参数设置 ..................................................................................................................... - 11 - 第9章KDL16慢车调试 ..................................................................................................................... - 14 - 第10章KDL16称重调试 ................................................................................................................... - 15 -1.1称重概述 ........................................................................................................................ - 15 -1.2调节称重装置LWI ........................................................................................................ - 15 -1.3调节称重装置(LWD+LCEVTC) ................................................................................... - 16 - 第11章KDL16快车调试 ..................................................................................................................... - 17 -1.1LWI距离感应装置的快车调试...................................................................................... - 17 -1.2绳头称重(LWD+LCEVTC)的快车调试............................................................................. - 18 -1.3井道设置 ........................................................................................................................ - 18 -1.4复位LCE 参数................................................................................................................ - 19 -1.5检查轿厢和对重平衡(50 %负载)............................................................................. - 19 -1.6检查轿厢和对重电气平衡(50 %负载)..................................................................... - 19 -1.7对LWD 操作进行微调.................................................................................................... - 19 -1.8速度控制的调整............................................................................................................. - 20 -1.9KTW/Q 因数(100 %负载)........................................................................................... - 20 -1.10急动或倒车................................................................................................................. - 21 -1.11绳重参数(50%负载)............................................................................................... - 21 -1.12起动转矩比列(0%负载)......................................................................................... - 22 -1.13轿厢电缆重量参数(0 % 负载)(对提升高度大于100 m)................................ - 22 -1.14P factor 和I factor调整..................................................................................... - 23 -1.150% 空载曳引测试....................................................................................................... - 23 -1.16轿厢50 %负载时的安全测试.................................................................................... - 24 -1.17轿厢100%负载时的安全测试.................................................................................... - 24 -1.18轿厢125%负载时的安全测试.................................................................................... - 25 -1.19单报闸电气制动测试(0 %负载)........................................................................... - 26 -第1章KDL16部件了解1.KDL16简介KDL16驱动是目前推出的一种小巧实用的一种改进型驱动,它可以替换原来的V3F16L等驱动,可以用在Monospace,Xminispace,Sminispace等梯型上.该类驱动分KDL16L及KDL16R两种,根据不同的电梯配置要求可以配用不同的KDL16驱动类别,KDL16L与V3F16L外形非常相似,但KDL16R外形就要扁些了.该类驱动不能使用原来的Tacho测速发电机而只能使用专用的编码器。
kdl16变频器驱动解释
培训资料,仅供参考驱动介绍V3F16ES 驱动原理:acdc.wmfACDCACDCMTr s tFilterL1L2L3V3F16es moduleElectronicsDynamic brakingMotor supply 0...300VAC 0...20 HzIntermediate circuit530...700 VDCMains supply 380...415 VACV3F驱动系统培训资料,仅供参考V3F16es 驱动介绍1/2组成:•385:A1 Drive Control Board (DCB) 驱动控制板•385:A2 Main Circuit Board (MCB) 主回路板•385:A3 Brake Control Board (BRK) 抱闸控制板•385:A4 Intermediate Circuit Board (IMC) 中间电路板•主接触器201:1,201:2,204(动态制动)•过滤器•充电电容385:C1,C2•充电电阻385:R1,R2(1k, 50w)V3F16es驱动介绍2/2内部结构培训资料,仅供参考V3F16L驱动介绍1/3驱动原理图培训资料,仅供参考V3F16L驱动介绍2/3制动电阻V3F16L驱动SEP井道控制柜KONE 3000 MonoSpace® 与KONE 3000 TranSys™ 控制柜分为两个部分一部分放到井道中,称为SEP-井道控制柜,另外一部分在顶层层门旁,称为MAP-维修操作盘培训资料,仅供参考V3F16L驱动介绍3/3 V3F16L 驱动模块组成:1. 制动器, XBR32. LCE电缆,XS33. 马达电缆,U-V-W4. 供电电缆,T1-T2-T35. LWD及马达电流,XW16. MAP测速计,XLG17. 测速计,XG18. LCECPU电缆,XL1 9.马达热敏,XT110. 制动电阻,XBRE211. 盖板12. 盖板连线13. 电缆套管孔培训资料,仅供参考V3F18/25驱动介绍1/3原理图:培训资料,仅供参考V3F18/25驱动介绍2/3V3F18驱动组成:1.制动控制模块385:A52.PCB模块385: A1, A23.电流测量板385:A34.主接触器201:1,2 & 辅助继电器 & 保险2985.直流电路电容器385:C1,C2,(C3,C4)6.EMC模块3897.变压器T18.风扇3039.动态制动接触器20410.大功率晶体管385:V1 (V3)11.三相整流桥385:V512.制动三极管385:V4培训资料,仅供参考V3F18/25驱动介绍4/3V3F25驱动组成:1.HCB:运动控制板385:A12.逆变器板385:A23.电流测量板385:A34.风扇3035.变压器896.中间直流电路电容器385:C1,C2,(C3,C4)7.大功率晶体管385:V1 (V3)8.制动三极管385:V49.二极管整流桥385:V510.(内部)制动电阻306。
(整理)变频器驱动电路详解.

变频器驱动电路详解测量驱动电路输出的六路驱动脉冲的电压幅度都符合要求,如用交流档测量正向激励脉冲电压的幅度约14V左右,负向截止电压的幅度约7.5V左右(不同的机型有所差异),对驱动电路经过以上检查,一般检修人员就认为可以装机了,此中忽略了一个极其重要的检查环节——对驱动电路电流(功率)输出能力的检查!很多我们认为已经正常修复的变频器,在运行中还会暴露出更隐蔽的故障现象,并由此导致了一定的返修率。
变频器空载或轻载运行正常,但带上一定负载后,出现电机振动、输出电压偏相、频跳OC故障等。
故障原因:A、驱动电路的供电电源电流(功率)输出能力不足;B、驱动IC 或驱动IC后置放大器低效,输出内阻变大,使驱动脉冲的电压幅度或电流幅度不足;C、IGBT低效,导通内阻变大,导通管压降增大。
C原因所导致的故障比例并不高,而且限于维修修部的条件所限,如无法为变频器提供额定负载试机。
但A、B原因所带来的隐蔽性故障,我们可以采用为驱动增加负载的方法,使其暴露出来,并进而修复之,从面能使返修率降到最低。
IGBT的正常开通既需要幅值足够的激励电路,如+12V以上,更需要足够的驱动电流,保障其可靠开通,或者说保障其导通在一定的低导通内阻下。
上述A、B故障原因的实质,即由于驱动电路的功率输出能力不足,导致了IGBT虽能开通但不能处于良好的低导能内阻的开通状态下,从而表现出输出偏相、电机振动剧烈和频跳OC故障等。
让我们从IGBT的控制特性上来做一下较为深入的分析,找出故障的根源所在。
一、IGBT的控制特性:通常的观念,认为IGBT器件是电压型控制器件——为栅偏压控制,只需提供一定电平幅度的激励电压,而不需吸取激励电流。
在小功率电路中,仅由数字门电路,就可以驱动MOS型绝缘栅场效应管。
做为IGBT,输入电路恰好具有MOS型绝缘栅场效应管的特性,因而也可视为电压控制器件。
这种观念其实有失偏颇。
因结构和工艺的原因,IGBT管子的栅-射结间形成了一个名为Cge的结电容,对IGBT管子开通和截止的控制,其实就是Cge进行的充、放电控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V3F16L驱动介绍1/3
驱动原理图
培训资料,仅供参考
V3F16L驱动介绍2/3
制动电阻
KONE 3000 MonoSpace® 与KONE 3000 TranSys™ 控制柜 分为两个部分
V3F16L驱动
SEP井道控制 柜
一部分放到井道中,称为 SEP-井道控制柜,
另外一部分在顶层层门旁, 称为MAP-维修操作盘
培训资料,仅供参考
V3F18/25驱动介绍1/3
原理图:
培训资料,仅供参考
V3F18/25驱动介绍2/3
V3F18驱动组成:
1. 制动控制模块385:A5 2. PCB模块385: A1, A2 3. 电流测量板385:A3 4. 主接触器201:1,2 & 辅助继电器 & 保险298 5. 直流电路电容器385:C1,C2,(C3,C4) 6. EMC模块389 7. 变压器T1 8. 风扇303 9. 动态制动接触器204 10. 大功率晶体管385:V1...V3 11. 三相整流桥385:V5料,仅供参考
V3F16L驱动介绍3/3
V3F16L驱动模块组成:
1. 制动器, XBR3 2. LCE电缆,XS3 3. 马达电缆,U-V-W 4. 供电电缆,T1-T2-T3 5. LWD及马达电流,XW1 6. MAP测速计,XLG1 7. 测速计,XG1 8. LCECPU电缆,XL1 9. 马达热敏,XT1 10. 制动电阻,XBRE2 11. 盖板 12. 盖板连线 13. 电缆套管孔
培训资料,仅供参考
V3F18/25驱动介绍5/3
HCB板 385:A1
培训资料,仅供参考
V3F18/25驱动介绍6/3
高压危 险指示
线电压选择 Line Voltage
逆变板 385A:2
培训资料,仅供参考
X6 到385:V4 XD5 到HCB板
KDL16驱动 -打开外盖
培训资料,仅供参考
KDL16驱动接线位置
制板
• 385:A4 Intermediate Circuit Board (IMC) 中间电路板
• 主接触器201:1,201:2,204(动态制动) • 过滤器 • 充电电容385:C1培,训C资2料,仅供参考 • 充电电阻385:R1,R2(1k, 50w)
V3F16es驱动介绍2/2
内部结构
培训资料,仅供参考
V3F18/25驱动介绍3/3
制动电阻306
40A驱动模块
V3F25驱动结构图: 385:
A3
385: A2
385: A1
制动三极管
IGBT 晶体管
385: V4 385: V3 385: V2 385: V1
二极管 整流桥
385: V5
385: C4
385: C2
电容器
385: C1 385: C3
89 变压器
303 风扇
V3F18/25驱动介绍4/3
V3F25驱动组成:
1. HCB:运动控制板385:A1 2. 逆变器板385:A2 3. 电流测量板385:A3 4. 风扇303 5. 变压器89 6. 中间直流电路电容器385:C1,C2,(C3,C4) 7. 大功率晶体管385:V1...V3 8. 制动三极管385:V4 9. 二极管整流桥385:V5 10.(内部)制动电阻306。只用于40A的V3F25中
培训资料,仅供参考
连KD接L16驱动
培训资料,仅供参考
内KD部L可16更L换驱部动件
培训资料,仅供参考
KDL16L 驱动模块的接地
培训资料,仅供参考
KDL16 马达主要参数
Motor type (6_60)参数
培训资料,仅供参考
KDL32驱动
培训资料,仅供参考
KDL32 马达主要参数
培训资料,仅供参考
Dynamic braking
培训资料,仅供参考
M T
acdc.wmf
V3F驱动系统
V3F16es驱动介绍1/2
组成:
• 385:A1 Drive Control Board (DCB) 驱动控制 板
• 385:A2 Main Circuit Board (MCB) 主回路板 • 385:A3 Brake Control Board (BRK) 抱闸控
驱动介绍
V3F16ES驱动原理:
Mains supply 380...415 VAC
Intermediate circuit 530...700 VDC
Motor supply 0...300VAC 0...20 Hz
L1
r
L2
s
L3
t
Filter
AC DC
DC AC
V3F16es module
Electronics