教你调试单轴飞行器
无人机操作技巧掌握手动飞行器调参技巧
无人机操作技巧掌握手动飞行器调参技巧无人机 (Unmanned Aerial Vehicle, UAV) 已成为现代科技领域的热门话题。
越来越多的人开始对无人机的操作技巧以及手动飞行器的调参技巧产生浓厚的兴趣。
本文将详细介绍一些重要的无人机操作技巧和手动飞行器调参技巧,以帮助读者掌握这些技能。
一、操控技巧1. 熟悉飞行控制器:在开始操作无人机之前,需要对飞行控制器有基本的了解。
了解不同控制器上的各个按钮和开关的功能,这样可以更好地掌握无人机的操控。
2. 开始之前的准备工作:在每次飞行之前,确保无人机正常工作。
检查电池电量,增加校准、预飞和预设航线等操作。
3. 固定起飞和降落:起飞和降落是飞行中最容易出现问题的阶段。
确保选择合适的起飞和降落区域,避免人群和障碍物,并且在起飞前检查无人机的姿态和环境。
4. 熟悉飞行模式:掌握不同的飞行模式,如手动飞行、姿态稳定、高度保持等。
在不同的场景下选择合适的飞行模式,提高操控性能。
5. 注意飞行速度和姿态:在飞行过程中,要控制好飞行速度和无人机的姿态。
过快的速度可能导致失控,而不稳定的姿态会影响拍摄效果。
二、手动飞行器调参技巧1. 调校飞行控制器:飞行控制器是手动飞行器的关键组件。
通过掌握飞行控制器的参数设置,可以提高飞行器的稳定性和操控性能。
了解PID(比例、积分、微分)控制器的原理和参数调整策略是重要的。
2. 调整姿态稳定:在手动飞行中,保持飞行器的水平和垂直稳定是至关重要的。
通过调整姿态控制的参数,可以使飞行器更好地回应操纵。
3. 高度和速度控制:手动飞行器的调参还需要注意高度和速度控制。
通过合理地配置控制器参数,提高飞行器对高度和速度的响应能力。
4. 降噪和滤波:手动飞行器在飞行过程中可能会受到外界干扰,例如风力等。
通过添加降噪和滤波处理,可以减少这些干扰对飞行器的影响。
5. 考虑电池和负重:手动飞行器的调参还需要考虑电池容量和负重。
合理配置电池参数以及调整负重分布可以提高飞行器的续航时间和稳定性。
无人机操作技巧掌握手动飞行器姿态调整技巧

无人机操作技巧掌握手动飞行器姿态调整技巧无人机的广泛应用已经成为了现代科技的一大亮点。
然而,想要成为一名出色的无人机操作员,并不仅仅需要了解飞行器的基本操作,更需要掌握手动飞行器姿态调整技巧。
本文将为大家介绍一些关键的操作技巧,帮助操作员更好地掌握无人机的飞行动作。
1. 调整飞行器姿态的基本原理无人机的姿态调整指的是控制飞行器在空中完成各种动作,如飞行、盘旋、拍摄等。
实现这些动作的基本原理是通过操控飞行器的俯仰(Pitch)、横滚(Roll)和偏航(Yaw)姿态进行调整。
俯仰姿态控制飞行器的前后倾斜,横滚姿态控制飞行器的左右倾斜,偏航姿态控制飞行器的水平旋转。
2. 掌握操纵杆的使用技巧在手动控制飞行器姿态时,操纵杆的使用是至关重要的。
一般来说,操纵杆包括两个轴:左右移动的横轴和上下移动的纵轴。
通过对操纵杆的操作,可以调整飞行器的俯仰和横滚姿态。
在纵轴移动时,向上移动会使飞行器向后倾斜,向下移动则会使其向前倾斜;在横轴移动时,向左移动会使飞行器向左倾斜,向右移动则会使其向右倾斜。
在实际操作中,需要根据飞行器的状态和所需动作来合理运用操纵杆,确保飞行器的稳定飞行。
3. 飞行器的平稳起飞和降落无人机的平稳起飞和降落是操作员必须掌握的基本技能。
在起飞时,首先将飞行器放置在平坦的地面上,并确保其所有舵机和传感器状态正常。
然后,将油门推至适当位置,使飞行器起飞并保持稳定的高度。
在降落时,同样需要适当调整油门,控制飞行器缓慢下降,最终平稳着陆。
在整个过程中,需要根据实际情况微调飞行器的姿态,确保飞行器的平稳运行。
4. 调整飞行器的盘旋动作盘旋是无人机常见的动作之一,经常用于空中拍摄或观察目标。
在进行盘旋时,操作员需要根据飞行器的实际位置和所需拍摄角度来调整飞行器的俯仰、横滚和偏航姿态。
通过适当的操纵杆操作,使飞行器保持平稳的盘旋状态,确保拍摄或观察的效果。
5. 手动控制飞行器的翻转动作无人机的翻转动作是激发操作员兴趣和展示飞行技巧的重要手段。
详细的APM飞控调试资料
调整ArduCopter 参数如果你使用的机身不是官方ArduCopter 套件,你可能需要改变一些PID设置(PID 是比例-积分- 微分的简称,是一个标准的控制方法。
更多的资料在这里)。
在此页底部的有一个PID的全面的指导.你可以在任务规划器的配置选项卡中以交互方式调整PID:基本性能故障排除•我的多旋翼在稳定模式下缓慢震荡(大幅运动): 降低 STABILIZE_ROLL_P,STABILIZE_PITCH_P.•我的多旋翼在稳定模式下***震荡(小幅运动): 降低 RATE_ROLL_P, RATE_PITCH_P。
•我的飞机过于迟钝:降低 RATE_ROLL_P,RATE_PITCH_P,和/或增加 STABILIZE_ROLL_P, STABILIZE_PITCH_P.•我调整了 Rate_P,还是不行:也许你的 STABILIZE_P gain 增益过高。
降低一点(见上文),并再次尝试调整 RATE_P.•我的飞机在起飞时向左或向右旋转15°:你的电机不直或着电调没有校准。
扭转电机,直到他们都直了。
运行ESC校准程序。
•激烈飞行后我的飞机偏向一方 10 - 30°:如该文所述,焊接 IMU 的滤波器U。
你可以在 system.pde 里调整漂移校正。
如果需要,大概调高0。
5.此外,降落30秒,然后继续飞行。
•我的飞机无法在空中保持完全静止:确保在飞机的重心在正中心。
然后在水平面上运行水平命令(保持关闭状态15秒,调用该功能).你也可以在无风的环境(重要)使用自动微调模式飞行。
任何风将导致四轴旋转180度后你的修改产生相反的作用。
你可以使用遥控俯仰和横滚微调,但记得在用配置工具设置遥控时,要把它们放回中心.我不喜欢使用发射微调,但永远不要使用偏航微调.(四轴也很容易受到紊流的影响。
他们将需要不断的修正,除非你安装一个光流传感器。
某天……)•我的飞机飞行很好,但后来在悬停时一条电机臂奇怪地下降了:你的电机坏了。
飞行器本科毕业论文选题(1299个)
飞⾏器本科毕业论⽂选题(1299个)毕业论⽂(设计)题⽬学院学院专业学⽣姓名学号年级级指导教师毕业教务处制表毕业⼆〇⼀五毕业年⼗⼆⽉毕业⼀⽇飞⾏器与毕业论⽂选题(1299个)⼀、论⽂说明本写作团队致⼒于毕业论⽂写作与辅导服务,精通前沿理论研究、仿真编程、数据图表制作,专业本科论⽂300起,具体可以联系⼆、论⽂参考题⽬《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养“中航⼯业杯”⽆⼈飞⾏器Yuneec Q500航拍⼀体飞⾏器Zano微型航拍四轴飞⾏器航天战术飞⾏器质量管理信息系统分析设计智能测污飞⾏器安卓⼿机遥控电动A4纸折微型飞⾏器总体设计为飞⾏器摄影⽽⽣:空中摄影附件⼤⽐拼浅谈⼩型低速航空飞⾏器造型美学基于DSP的多轴⽆⼈飞⾏器设计亚拓M690L多轴飞⾏器浅析电动多旋翼飞⾏器的设计及其在农业领域中的应⽤⼀种⾼级飞⾏器测试数据时域判读⽅法⾼超声速飞⾏器上升段轨迹优化了不起的飞⾏器微型飞⾏器的⼩幅运动⽓动⼒建模研究六旋翼飞⾏器容错控制算法我最喜欢的玩具——愤怒的⼩鸟发光感应飞⾏器折叠式飞⾏器机翼展开装置的技术研究⾼超⾳速飞⾏器⽓动热研究进展新型四旋翼飞⾏器设计与制作某型海⾯飞⾏器⽤阀门断裂原因的失效分析另类“单⼈飞⾏器”⽆⼈旋翼飞⾏器⾃适应飞⾏控制系统设计多功能探测智能四轴飞⾏器的研制分析亚拓M480L多轴飞⾏器基于⽆⼈飞⾏器和GIS的防汛抗旱监测系统基于ANSYS的四轴飞⾏器机架振动分析四旋翼飞⾏器多传感器硬件的电路设计基于PID神经⽹络的四旋翼飞⾏器控制系统研究输电线路精细化故障查找飞⾏器研制及应⽤⼩型四轴飞⾏器控制器设计的研究校园空中监管四轴飞⾏器的设计动⼿做⽓球飞⾏器新型涵道⽆⼈飞⾏器飞⾏控制策略研究基于四轴飞⾏器的PID姿态控制系统基于X—Bee和STM32F407的四轴飞⾏器设计基于飞⾏器的复杂零件⾃动加⼯及组装技术的研究飞⾏器坠海咋打捞?四旋翼飞⾏器飞⾏轨迹的仿真研究视觉导航的四轴飞⾏器控制系统设计农⽤⽆⼈遥控飞⾏器优势和效益分析可续航三栖探测飞⾏器系统设计与实现基于DSP的四旋翼⽆⼈飞⾏器控制系统基于WIFI的智能多功能微型四旋翼飞⾏器设计四轴飞⾏器的姿态研究与设计基于ARM的⼀种⽆⼈航拍旋翼飞⾏器设计“空中牧⽺⽝”让飞⾏器竞赛更具挑战与趣味性⼀种垂直起降飞⾏器四旋翼飞⾏器的设计与仿真分析北京航天长征飞⾏器研究所“图像去模糊技术”国际领先扑翼式飞⾏器的发展与展望飞⾏器健康监控的概念及其发展飞翔的歌利亚:超级飞⾏器狂想⾼超声速飞⾏器建模研究基于分布估计算法的弹性飞翼飞⾏器多操纵⾯控制分配基于Multiwii的开源四轴飞⾏器⼀种新型⽆⼈机⼩型化飞⾏器管理计算机的设计实现美空军科学咨询委员会评估⾼超声速飞⾏器技术成熟度基于OPC技术的飞⾏器测试与控制系统设计Mil—1394b总线在飞⾏器管理系统中的典型应⽤分析飞⾏器供电系统最⼤功率跟踪与测试技术研究微型飞⾏器悬臂谐振分析⾼空长航时飞⾏器⾃主导航系统研究及试验验证电动多旋翼飞⾏器的特点及其在农业中的应⽤带魔⼒的球球飞⾏器⽤KT板制作四轴飞⾏器机架的可⾏性电⼒巡线⽤四旋翼飞⾏器软硬件设计地效飞⾏器的发展及其军事应⽤⾃动航⾏飞⾏器设计变结构飞⾏器的故障诊断与容错控制盘点全球⼋⼤奇葩飞⾏器从中国⾼超声速导弹试验谈亚轨道飞⾏器⼀种警⽤可折叠六旋翼飞⾏器设计漫谈多轴飞⾏器的操纵⽅式基于Fluent的飞⾏器⽓动参数计算⽅法基于STM32单⽚机的三叶浆四旋翼飞⾏器设计四轴飞⾏器仿真系统设计滑翔飞⾏器威胁区规避算法研究魔⽅型深空探测飞⾏器未来变体⽆⼈飞⾏器的关键技术太空飞⾏器的空⽓动⼒学数据新型飞⾏器航空飞⾏器的结冰与防冰四旋翼飞⾏器控制系统设计基于⼿机WIFI通信的空中探测飞⾏器研制基于GPS及光流传感器的四旋翼飞⾏器四翼飞⾏器⽤于紧急运输的⽹络设计低空探测飞⾏器的改装及其在现代⽓象服务中的应⽤四旋翼飞⾏器增稳混合控制器求破解之法⾼超声速飞⾏器的拦截和防御基于⼴义逆矩阵求解的空间飞⾏器的定位7旬⽼⼈欲研制出⽆动⼒飞⾏器微型旋翼飞⾏器的现状分析和发展趋势初探英国⼈设计“怪物”飞⾏器结合飞艇、飞机、直升机的世界最长飞⾏器基于PIV原理的微型扑翼飞⾏器流场试验台遥控飞⾏器航拍在建设⼯程中的应⽤基于Mahony滤波器和PID控制器的四旋翼飞⾏器姿态控制飞⾏器制造⼯程专业教学⽅法改⾰模式研究⾼超声速飞⾏器的滑模预测控制⽅法⾼超⾳速飞⾏器引领空天武器新趋势飞⾏器⾥的好⼩伙多学科设计优化算法及其在飞⾏器设计中应⽤太阳帆飞⾏器⾃适应极点配置控制⽅法研究低空飞⾏器即时航迹评估⽅法及模型⾼空飞⾏器供油驱动系统IGBT模块结温特性研究综合化飞⾏器管理计算机技术研究虚拟制造技术在飞⾏器设计中的应⽤⽆⼈机飞⾏器通信链路抗⼲扰性能⽐较研究四旋翼⾃主飞⾏器系统发展中的飞⾏器射频隐⾝技术⼈造昆⾍——微型飞⾏器飞⾏器:作为艺术的喷⽓机飞⾏器设计的多参数决策matlab的模拟实现马丁飞⾏器宫崎骏关键词:少⼥,森林,飞⾏器四旋翼⾃主飞⾏器私⼈航天飞⾏器各显神通传说中的磁单极飞⾏器基于FPGA的⽆⼈飞⾏器温度巡检装置的设计蜂窝与太空飞⾏器地效飞⾏器周围流体场数值模拟国外⾼校浮空飞⾏器学⽣创新实践活动的发展与启⽰飞⾏器⼤型薄壁件制造的柔性⼯装技术临近空间⾼超声速飞⾏器建模与控制研究进展⾼速飞⾏器直接⼒/⽓动⼒复合控制技术综述多旋翼飞⾏器在输电线路巡维的应⽤飞⾏器⽼牌电⽓公司的飞⾏器德国西门⼦-舒克特SSW D.III/D.IV战⽃机关于脑电波控制飞⾏器的研究现状概述基于粒⼦群算法的再⼊式飞⾏器再⼊⾛廊计算⽅法研究⼀种飞⾏器测控电源的实时监测装置设计与实现⾼超⾳速飞⾏器呼之欲出基于科研资源向教学资源转化的飞⾏器结构⼒学的本科教育研究与实践飞⾏器吸⽓式⾼超声速飞⾏器纵向运动反演控制器设计四轴飞⾏器⽆刷直流电机驱动技术研究康达效应飞⾏器研究及应⽤飞⾏器的那些事SINS/CNS组合导航对⾼空飞⾏器再⼊精度的影响有输⼊饱和的⽋驱动VTOL飞⾏器滑模控制飞⾏器跳“龙门”临近空间飞⾏器发展概况外星飞⾏器没有来!俄研制新型地效飞⾏器“驭波者”来袭美国空军X—51A⾼超⾳速飞⾏器试验成功基于改进互补滤波器的低成本微⼩飞⾏器姿态估计⽅法基于⽆线传感器⽹络的飞⾏器结构健康监测系统的关键技术研究与应⽤某飞⾏器温度遥测参数异常分析对四轴飞⾏器的姿态控制器的设计与仿真⼗⼤即将实现的未来飞⾏器做⼀架⽓垫飞⾏器贴地飞⾏器再⽣源于SAAB的灵魂战车—北汽绅宝柔性与刚性机翼微型飞⾏器⽓动特性差异研究动基座飞⾏器故障弹道仿真飞⾏器三维轨迹动态显⽰系统的设计基于Matlab/Simulink的飞⾏器全数字仿真平台的设计基于测向阵列的空中飞⾏器瞬时⽆源定位完美主义飞⾏器未来飞⾏器未来飞⾏器微探飞⾏器电⼒巡检欧洲航天局透露“⾼速试验飞⾏器”计划细节⾃主学习教学⽅法在“飞⾏器⾃主导航”课程中的应⽤体会发展中的飞⾏器射频隐⾝技术“创新杯”第五届全国未来飞⾏器设计⼤赛获奖作品选登ADS—B飞⾏器航迹监视的三维可视化探讨世界上最⼩的亚轨道载⼈飞⾏器四旋翼⽆⼈飞⾏器混合控制系统研究神奇的意念遥控飞⾏器“创新杯”第五届全国未来飞⾏器设计⼤赛颁奖仪式在珠海召开天津滨海⾼新区特种飞⾏器研发基地⼆期开⼯超⾼速飞⾏器可数⼩时飞越太平洋等选择哪些飞⾏器航拍?雷震⼦与⼩型飞⾏器⼀起来做四轴飞⾏器(下)基于四杆机构对仿⽣蜻蜓扑翼飞⾏器的设计优化与仿真近空间飞⾏器故障诊断与容错控制的研究进展基于QFT的四旋翼飞⾏器飞⾏控制算法研究美国飞⾏器图形⼀起来做四轴飞⾏器(上)微型飞⾏器像昆⾍那样飞⾮常规布局的斜掠翼飞⾏器微型飞⾏器像昆⾍那样飞⾼超声速飞⾏器参数化⼏何建模⽅法与外形优化X基于单⽬视觉的室内微型飞⾏器位姿估计与环境构建“飞航杯”全国⾸届未来飞⾏器设计⼤赛揭晓明天,乘什么样的飞⾏器去旅⾏临近空间环境对临近空间飞⾏器的影响乘波者飞⾏器,⼀⼩时打击全球随⼼所欲飞⾏器⽔上飞⾏器做椭圆运动的飞⾏器近地点速度范围的浅显证明从天宫⼀号的发射看飞⾏器的空间交会对接使⽤GPS传感器的飞⾏器⾃动抛物系统设计扇翼飞⾏器模型的设计与制作Vega环境下的某飞⾏器视景仿真的实现教你调试单轴飞⾏器四旋翼微型飞⾏器设计⽇本⾼超声速飞⾏器技术发展解析基于DSP的发射控制系统在提⾼飞⾏器发射精度中的应⽤TYPE 20飞⾏器腕表碟影重重探秘国外圆盘形飞⾏器飞⾏器发展史遥控飞⾏器与摄像机——派诺特AR.Drone 2.0“天宫⼀号”飞⾏器发射的地理⾓度分析关于四轴飞⾏器的姿态动⼒学建模飞⾏器飞⾏⼯况视频监测及图像处理“航天创意杯”新概念飞⾏器创新⼤赛落下帷幕“猎户座”嬗变:从乘员探测飞⾏器到多⽤途载⼈飞船⼀款“KK”板单轴飞⾏器亚特兰蒂斯的飞⾏器飞⾏器制造⼯程专业实践教学体系完善研究通古斯之谜⼜有新说祸⾸疑是天外飞⾏器视频跟踪四旋翼飞⾏器创新实验系统明天,乘什么样的飞⾏器去旅⾏对“天宫⼀号”⽬标飞⾏器发射成功的多⾓度思考基于DE算法的再⼊飞⾏器横向机动能⼒研究基于改进粒⼦群算法的再⼊飞⾏器轨迹优化基于BP⽹络的飞⾏器解耦设计美披露外⼤⽓层杀伤飞⾏器陆基拦截试验失败原因飞⾏器机翼布局对雷达隐⾝性能影响探讨⼀种新飞⾏器的设想Evolution of Aircrafts飞⾏器发展史未来50年的概念飞⾏器直升机/喷⽓机混合飞⾏器⾸届中航⼯业杯——国际⽆⼈飞⾏器创新⼤奖赛闭幕天宫⼀号⽬标飞⾏器发射升空后准确进⼊预定轨道绿⾊飞⾏器的梦想与现实乘着⽉亮的飞⾏器中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办晶体硅电池在太阳能飞⾏器上的选择与应⽤(下)“KK”飞控板系列飞⾏器的制作基于⾃适应逆的微型飞⾏器飞⾏控制系统美研制微型飞⾏器晶体硅电池在太阳能飞⾏器上的选择与应⽤晶体硅电池在太阳能飞⾏器上的选择与应⽤(上)探索近空飞⾏器创新永不⽌步飞⾏器专业开设基于多知识点的综合性\设计性实验的研究⼈类最早的飞⾏器《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养⾃转旋翼/机翼组合构型飞⾏器飞⾏动⼒学特性旋翼飞⾏器飞⾏动⼒学系统辨识建模算法飞⾏器等离⼦体隐⾝技术及研究现状飞⾏器的翅膀美国轨道试验飞⾏器X-37B⽇内⽡国际车展飞⾏器的化妆舞会基于MATLAB的⽆⼈飞⾏器两点交会定位算法研究基于TVARMA的飞⾏器结构响应序列参数谱估计“天宫⼀号”⽬标飞⾏器的搭载⽅案评审结果揭晓中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办美国公布⾼超声速试验飞⾏器试飞失败原因Draganfly四旋翼微型飞⾏器⾯向分级设计优化的飞⾏器参数化建模⽅法未来太空飞⾏器⼤曝光玛雅⽯板上的宇宙飞⾏器之谜X-37B“轨道试验飞⾏器1号”美国X系列飞⾏器(四)垂直极限的挑战⼀种飞⾏器综合健康管理系统决策⽀持层的设计⽅法飞⾏器⼤振幅运动实验与⽓动⼒建模飞⾏器隐⾝技术现状及其未来发展趋势个⼈飞⾏器显⾝⼿研制超微型飞⾏器成世界新趋势⽹络中⼼战的空中多⾯⼿:⽆⼈飞⾏器⼩波变换在飞⾏器遥测数据分析中的应⽤全⾃动航测测量系统MAP-Ver 在⽆⼈飞⾏器低空航摄数据处理中的应⽤飞⾏器板结构中Lamb波解析建模研究“怪物”飞⾏器上班族的飞⾏器美国X性系列飞⾏器⼀开启空间战争新时代?难以证实的古代宇宙飞⾏器之谜未来的飞⾏器数学专业:飞⾏器环境与⽣命保障⼯程考虑迟滞⾮线性的⾼超声速飞⾏器颤振分析伞翼飞⾏器折叠式飞⾏器等多⼯况下⾼超声速飞⾏器再⼊时流场的计算新型电⼒飞⾏器“帕分”等2则彩笔“飞⾏器”通⽤再⼊飞⾏器空间作战飞⾏器⽔动⼒穿戴式飞⾏器⾛近轻型运动飞⾏器“磁悬浮”:零⾼度飞⾏器飞⾏器电⽓接⼝⾃动测试系统设计关于飞⾏器振动仿真模拟的分析飞⾏器仪器舱混响室声环境实验研究和数值模拟折叠式飞⾏器·GPS定位鞋等超轻型飞⾏器的设计制作和试飞倾转双涵道风扇单⼈垂直起降飞⾏器抗震救灾的飞⾏器基于有限状态机的飞⾏器⾃毁系统时序控制设计近空间飞⾏器及其关键材料临近空间飞⾏器⾼超声速飞⾏器多约束参考轨迹快速规划算法基于CMAC⽹络的飞⾏器再⼊标准轨道制导基于INA-QFT的⾼超声速飞⾏器鲁棒控制器设计飞翼式飞⾏器结构布局与构件尺⼨的两级优化近空间飞⾏器的DSF:vsat鲁棒快速Terminal滑模控制⼗⼤杰出飞⾏器太空飞⾏器如何调控温度(下篇)UFO飞⾏器即将上市和飞⾏器相关的专业有哪些等太空飞⾏器如何调控温度(上篇)宇宙飞⾏器上带的电⼦脑袋新型飞⾏器飞⾏器的电磁⼒制动亚轨道飞⾏器返回段动⼒学虚拟样机设计⼤⽩丁博⼠的助⼒飞⾏器基于wince的飞⾏器姿态采集系统的设计与实现灵巧型军民通⽤交通⼯具——飞⾏家三栖飞⾏器基于遗传算法的飞⾏器路径规划研究临近空间和临近空间飞⾏器扑翼微型飞⾏器⾮线性H∞姿态控制飞⾏器虚拟现实仿真研究中国研制成功形似“UFO”的实⽤飞⾏器等⾼超声速飞⾏器的⽓动外形飞⾏器系统级可测试性设计⽅法研究“创新”杯第⼆届全国未来飞⾏器设计⼤赛专业⼆等奖作品(⼆)欧洲第⼀艘“⾃动转移飞⾏器”发射升空等完美世界飞⾏器再绎⾃由新梦想私享者的飞⾏器临近空间飞⾏器的种类及军事应⽤⽔上飞机、地效飞⾏器与冲翼艇辨析⾃主飞⾏器向苍蝇看齐东梦岛——奇奇的飞⾏器电⼦⼲扰对低可观测飞⾏器飞⾏路径规划的影响国内外微型飞⾏器研究现状及技术特点⼟⾖·⽜仔·总统⼭·柑橘·飞⾏器·⼤瀑布美国临近空间飞⾏器技术发展概述从“飞⾏器”谈起的“科学”飞⾏器的“摇篮”新型飞⾏器造艘飞⾏器去参赛⽇本准备进⾏升⼒体再⼊飞⾏器试验昆⾍飞⾏器飞⾏器造型⼤⽐拼飞⾏器的“原动⼒”飞⾏器在直⾓坐标系中定位⽅法研究飞⾏器助推段振动环境分析近空间飞⾏器成为各国近期研究的热点(下)近空间飞⾏器成为各国近期研究的热点(上)飞⾏器的奥秘应⽤于微型飞⾏器阵列天线的⾃适应波束形成器苍蝇飞⾏器正“瘦⾝”训练⾼超声速飞⾏器滑⾏航迹优化飞⾏器RCS计算前置处理中裁剪曲⾯剖分算法⾼超声速飞⾏器BTT⾮线性控制器设计与仿真基于MAS的空天飞⾏器⾃主控制系统设计⾼超⾳速飞⾏器头罩⽓动热流场数值模拟微型仿⽣扑翼飞⾏器的尺度效应分析美国航宇局探索体系和“机组探索飞⾏器”问答追逐飞⾏器的龟壳911TurBo不⼀样的新兵:美国研制“临近空间”飞⾏器“⼩鹰”号地效飞⾏器飞⾏器发动机的分类及⼯作原理⼀种翼⾝融合体飞⾏器外形的RCS计算与实验发明载⼈飞⾏器的应是中国⼈某RLV飞⾏器投放轨迹的设计与分析⾼空⾼速⽆⼈飞⾏器热控制系统设计碟形飞⾏器发展现状及其关键技术世爵:陆地飞⾏器⾼能激光武器的毁伤机理及飞⾏器防御途径分析美国的机组探测飞⾏器计划基于遗传算法的飞⾏器追踪拦截模糊导引律优化设计⽆⼈飞⾏器⾃主着舰实时场景的仿真实现基于OpenGL的飞⾏器超低空追击/拦截三维可视化仿真系统“地⾯飞⾏器”飞⾏器控制软件的Statechart原型及其验证跨⼤⽓层飞⾏器爬升段纵向飞⾏控制律和制导律设计地效飞⾏器的海战应⽤地效飞⾏器何以东⼭再起飞⾏器多学科设计优化软件系统防晕飞⾏器微型飞⾏器的微⼩摄像与⽆线传输系统旋翼式微型飞⾏器升⼒系统设计基于Matlab的飞⾏器系统动态特性分析飞⾏器结构特征提取与识别飞⾏器动态下俯过程中的负阻⼒现象激光推进轻型飞⾏器——⼤⽓模式和激光烧蚀推进相结合⾃⼰做个飞⾏器可重复使⽤空间飞⾏器的飞⾏控制飞⾏器RCS预估计算前置处理的曲⾯元⽅法基于视频图像的微型飞⾏器飞⾏⾼度提取⽅法各具特⾊的新动⼒飞⾏器微型飞⾏器新型极化电磁驱动舵机的研究飞⾏器结构模型的塑性动⼒响应和失效研究超⼩型固定翼飞⾏器飞控系统研究数据库中的知识发现在飞⾏器故障诊断中的应⽤登⽉飞⾏器软着陆轨道的遗传算法优化飞⾏器动⼒学虚拟样机技术研究微型飞⾏器螺旋桨的⽓动优化设计我所研究的磁悬浮环形飞⾏器基于GIS的⽆⼈飞⾏器路径规划航空百年:“601所杯”未来飞⾏器设计⼤赛启事新闻⾥的飞⾏器:RJ-100型客机“熊蜂-1T“遥控飞⾏器“熊蜂-1T”遥控飞⾏器⼩型观测系统新型飞⾏器V-44问世飞⾏器座舱联想形形⾊⾊的新飞⾏器阿列克谢耶夫与他的地效飞⾏器神奇的地效飞⾏器空间作战飞⾏器。
X600D 飞行控制参数设置指南_V0.2
XAircraft X600D 飞行控制参数设置指南V0.2一、遥控参数设置比例: 1 ~ 255范围内的值,表示对遥控杆量的增益。
比如,Pitch杆向前压的值为5,当比例为3时,飞行控制器会把它的值换算成15(5*3=15)。
当比例值为1时不增益。
灵敏度:1~255范围内的值,值越大,飞行控制器对摇杆变化的响应速度越快。
二、飞行控制器参数设置:PID参数设置需要工程控制理论知识,建议在出厂值的基础上进行微调。
飞行控制器使用PID控制理论来实现飞行器的自动平衡能力。
软件可以分别设置pitch, roll, yaw三个维度的PID参数,在未安装GPS模块前,此项功能无效。
在进行PID参数设置之前,请参阅附录《PID参数设置》中对PID控制理论的介绍和PID 参数的调节方法。
三、电机参数设置飞行控制器将来自RC的油门解析为0~255之间的数值。
启动:当来自RC的油门值达到这个值时,飞行控制器将启动马达。
油门最大值:用于飞行控制器对RC油门进行限幅。
动态因子:增益PID算法输出的控制量,这个值越大,飞行器反应更暴力。
X600D预留了一路输出,可以驱动舵机,可用于DIYer自己添加相机吊架(需要对脚架进行DIY)。
这些参数用于配置飞行控制器如何控制舵机(间接控制相机吊架的俯仰)。
Angle_Min:相机视角的最小值。
该值是输出到舵机的控制量,并不表示角度,不同的舵机反应可能不同。
Angle_Max:相机视角的最大值。
该值是输出到舵机的控制量,并不表示角度,不同的舵机反应可能不同。
Angle Initial Point:相机的初始视角。
该值是输出到舵机的控制量,并不表示角度,不同的舵机反应可能不同。
Refresh:舵机信号输出周期(ms),数码舵机可以设置成大于2ms 的值,而一般的舵机请设置在10ms以上。
Degree Factor:当飞行器进行pitch方向上的运动时,相机吊架进行自平衡的因子。
通常这个值设置成1即可,但不同的舵机的反应可能不同,需要进行少量调节。
航模直升机调试[指点]
![航模直升机调试[指点]](https://img.taocdn.com/s3/m/9f4e2933cdbff121dd36a32d7375a417876fc151.png)
航模直升机调试一、包裹检查。
拆开以后要检查外观是否良好,随机配件是否齐全,商家的赠品是否齐全。
一般会有一份说明书,里面有装箱单,按照单子上写的一一清点即是。
特别注意的是一些小东西,例如雷鸟给了一个很小的内六角扳手,就插在泡沫里面,很容易忽略。
如果有问题不要擅自处理,赶紧与商家联系调换。
特别要说明的是模友们在下订单之前一定要跟商家咨询清楚,说明书是中文的还是英文的,很多模友都因为英文说明书看不懂而头疼。
如果原厂的说明书是英文的,最好让商家给复印一份中文的。
二、充电。
上电调试之前需要做很多调试项目,这个时候正好充电。
对于雷鸟原配的镍氢电池和充电器,由于没有指示灯,只能凭经验充电。
一般是充1.5-2小时,充电结束时电池温乎的即可,不要过充。
时间到了就把充电器和电池拔下来,这种普通镍氢充电器是不会自动停止的。
以后有条件换一个自动的,非常方便。
前一两次充电的时候注意掌握一下时间,以后就固定充这么长时间即可。
至于很多直升机原配的锂电池就比较简单了,充电器有双色的指示灯,一般红色是充电,绿色就表示充好了,充电器会自动停止。
三、上电前的调试。
这个调试有很多步骤,需要的工具很简单,就是一把小十字螺丝刀。
五金商店有一种十字和一字两头能更换的小螺丝刀,几块钱,非常好用。
1、主桨和旋翼头。
出厂的时候为了能装在盒子里面,主桨是折叠的,旋翼头固定主桨的螺丝是比较松的。
要把这个螺丝拧紧。
紧到什么程度,只要主桨不能随意转动,但是在主轴高速旋转时主桨又能够被甩直为准。
因为这个螺丝太松会引起双桨及低速的机体振动,太紧主桨不能被甩直,会带来更多的问题。
2、平衡翼杆及平衡翼片。
首先是平衡翼杆两边的长度要完全对称,然后用手转一下平衡翼杆,看是否能够转动。
正常的情况是不能,如果能转动说明控制外盘(控制外盘就是旋翼头下面的那个方框形状的部件,平衡翼杆是从其间穿过去的。
)上面锁紧平衡翼杆的两个螺丝松动了。
紧固的方法是把连接旋翼头和控制外盘的两个双孔连杆取下,左手在旋翼头下面抓住控制外盘,右手在侧面抓住旋翼头一侧固定主桨的螺丝,右手稍微用力向上提,主桨就取下来了,你就能看见控制外盘上面的两个内六角螺丝。
飞行器的调试方法
飞行器的调试方法概述调试是飞行器完成各项任务之前必须经过的重要步骤。
通过调试,可以确保飞行器的安全性和功能正常运行。
本文档介绍了飞行器调试的基本方法和注意事项。
步骤1. 确定调试目标在开始调试之前,要明确调试的目标和要解决的问题。
例如,是要优化飞行器的稳定性还是增强其操控性能。
2. 制定调试计划制定调试计划是确保调试顺利进行的关键步骤。
计划应包括调试所需的设备和工具,以及调试过程的具体安排。
3. 检查硬件设置在开始调试之前,要仔细检查飞行器的硬件设置是否正确。
这包括检查电池连接、传感器位置和连接线的插入情况等。
4. 调试飞行器姿态控制飞行器姿态控制是调试中的重要一环。
通过调整飞行器的姿态控制参数,可以使飞行器保持在期望的姿态下飞行。
调试时应根据飞行器的特点和需求,逐步优化姿态控制参数。
5. 测试系统功能在完成姿态控制调试后,需要测试飞行器的其他功能,如GPS 定位、飞行模式切换等。
通过对系统功能的测试,可以确保飞行器的各项功能正常运行。
6. 优化飞行器性能根据测试结果,可以对飞行器的性能进行优化。
这包括调整飞行器的飞行效率、反应速度等参数,以提高整体性能。
7. 飞行器稳定性测试为确保飞行器具有良好的稳定性,需要进行稳定性测试。
通过对飞行器在不同环境条件下的测试,可以发现并解决可能存在的稳定性问题。
注意事项- 在调试过程中,应时刻关注飞行器的安全性。
确保飞行器处于合适的高度和安全的区域进行调试。
- 调试时应记录测试结果和调整参数的过程,以便追溯和比较不同调试结果。
- 若遇到问题无法解决,应及时寻求专业人士的帮助。
以上是飞行器的调试方法的简要说明。
通过逐步调试和测试,飞行器可以达到预期的性能和功能要求。
---*请注意:此文档所提供的信息仅供参考,具体的调试方法和注意事项可能因飞行器的型号和配置而有所不同。
在实际调试过程中,请遵循飞行器制造商提供的指导和注意事项。
*。
一种单轴旋转INS大方位失准角下快速对准方法
一种单轴旋转INS大方位失准角下快速对准方法单轴旋转惯性导航系统(INS)是一种基于陀螺仪和加速度计等传感器的导航系统,广泛应用于航空、航天、军事、海洋等领域。
INS能够测量飞行器的运动状态,如位置、速度、加速度、姿态等,为飞行控制提供重要参考。
但是,INS在运行过程中会受到不同因素的影响,如机械误差、温度变化、振动等,导致INS大方位失准角的产生。
为了保证INS的精度和可靠性,需要进行快速对准。
一种常用的快速对准方法是基于星敏感器的对准方法,但是对准时间较长,并且受到天气、星座分布等因素的影响。
因此,研究快速对准方法具有重要意义。
一种单轴旋转INS大方位失准角下快速对准方法是基于多传感器融合的方法。
该方法利用INS、GPS和气压高度计等多传感器测量数据,进行数据融合,并通过滤波算法提高姿态估计精度,进而实现快速对准。
具体步骤如下:1. 收集数据:开机后,利用GPS记录初始化位置,并记录INS输出数据。
同时,利用气压高度计获取当前高度信息。
2. 处理数据:对INS输出的姿态、速度和位置数据进行初步处理,包括数据校正、误差估计和滤波处理等。
3. 姿态估计:采用卡尔曼滤波算法对姿态信息进行估计,并将多个传感器的信息进行融合,提高姿态估计精度。
4. 快速对准:基于估计的姿态信息,将飞行器的航向角和姿态角调整至正确位置,通过INS输出调整结果,进行快速对准。
该方法的优点是可以通过多传感器的融合,提高姿态估计的精度,并且可以在短时间内实现快速对准。
同时,该方法可以有效地减少由于INS机械误差、温度变化、振动等因素导致的INS大方位失准角,保证导航系统的精度和可靠性,提高了飞行器的安全性。
总之,一种单轴旋转INS大方位失准角下快速对准方法是基于多传感器融合的方法,通过采用卡尔曼滤波算法对姿态信息进行估计,并将多个传感器的信息进行融合,实现快速对准。
该方法在INS大方位失准角问题的解决中具有重要意义,可以提高导航系统的精度和可靠性,提高飞行器的安全性。
无人机运行手册飞行器相机与云台配置与调校
无人机运行手册飞行器相机与云台配置与调校无人机运行手册:飞行器相机与云台配置与调校一、概述随着科技的迅猛发展,无人机在各个领域得到了广泛的应用,特别是在航拍、农业、测绘等行业。
而无人机的飞行器相机和云台的配置与调校对于航拍效果至关重要。
本文将介绍无人机飞行器相机与云台的配置与调校方法,帮助用户更好地进行航拍工作。
二、相机配置1. 检查相机连接首先确保相机连接正常,无松动。
在连接过程中要注意避免刮花相机表面。
2. 设置相机参数根据拍摄需求,设置相机参数,如分辨率、白平衡、曝光等。
调整好参数能够获得更好的拍摄效果。
3. 校准相机在飞行前进行相机校准,确保相机水平和垂直仪表准确。
这样可以避免出现拍摄歪斜等问题。
三、云台配置1. 调整云台平衡在安装云台时要保证其重心平衡,避免云台晃动影响拍摄效果。
2. 设置云台参数根据实际需要设置云台参数,如跟随速度、阻尼等。
合理的设置可以使拍摄更加顺畅。
3. 调整云台稳定性在飞行中校准云台稳定性,避免出现抖动或晃动情况。
四、调校方法1. 水平校准在平整的地面上进行水平校准,确保相机水平仪表准确。
2. 垂直校准同样在平面上进行垂直校准,确保相机垂直仪表准确。
3. 飞行测试在空旷的地方进行飞行测试,检查相机和云台是否正常工作。
五、注意事项1. 飞行前检查在每次飞行前要检查相机和云台的连接是否牢固,避免意外发生。
2. 飞行中注意安全飞行过程中要遵守相关规定,确保周围环境安全。
3. 合理使用模式根据实际需要选择合适的飞行模式,保证拍摄效果。
通过上述介绍,相信大家对于无人机飞行器相机与云台的配置与调校有了更深入的了解。
在实际操作中,要注意细致周密,保证飞行安全、拍摄效果。
希望本文可以帮助到大家更好地进行无人机航拍工作。
飞行器机械控制系统调整和测试指南说明书
THS ACTUATOR VALVE BLOCKS - ADJUSMENT/TEST1.Reason for the JobWARNING:CHOCKS ARE IN POSITION.BEFORE APPLYING OR RELIEVING HYDRAULIC SYSTEM PRESSURE,MAKE CERTAIN THAT THE TRAVEL RANGES OF THE CONTROLSURFACES ARE CLEAR.BEFORE PRESSURIZING HYDRAULIC SYSTEMS, CHECK THAT ALLCONTROLS ARE SET TO CORRESPOND WITH THE ACTUAL POSITIONOF THE SERVICES THEY OPERATE.BEFORE PROCEEDING WITH MAINTENANCE WORK ON OR NEARMECHANICAL FLIGHT CONTROLS OR PRIMARY FLIGHT CONTROLSURFACES, LANDING GEARS, ASSOCIATED DOORS OR ANY MOVINGCOMPONENT, MAKE CERTAIN THAT GROUND SAFETIES AND/ ORWARNING NOTICES ARE IN CORRECT POSITION TO PREVENTINADVERTENT OPERATION OF CONTROLS.A.Verification of synchronization of the actuator valve blocks.B.Adjustment of actuator valve blocks after slightdesynchronization.C.Adjustment of actuator valve blocks after significantdesynchronization.2.Equipment and MaterialsWARNING:CHOCKS ARE IN POSITION.BEFORE APPLYING OR RELIEVING HYDRAULIC SYSTEM PRESSURE,MAKE CERTAIN THAT THE TRAVEL RANGES OF THE CONTROLSURFACES ARE CLEAR.BEFORE PRESSURIZING HYDRAULIC SYSTEMS, CHECK THAT ALLCONTROLS ARE SET TO CORRESPOND WITH THE ACTUAL POSITIONOF THE SERVICES THEY OPERATE.BEFORE PROCEEDING WITH MAINTENANCE WORK ON OR NEARMECHANICAL FLIGHT CONTROLS OR PRIMARY FLIGHT CONTROLSURFACES, LANDING GEARS, ASSOCIATED DOORS OR ANY MOVINGCOMPONENT, MAKE CERTAIN THAT GROUND SAFETIES AND/ ORWARNING NOTICES ARE IN CORRECT POSITION TO PREVENTINADVERTENT OPERATION OF CONTROLS.ITEM DESIGNATIONA.B.C.OU190360Access Platform, 5.5 m (18 ft.) Warning NoticesRigging Pin - THS Actuator Mechanical Input LeverITEM DESIGNATIONTHE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLE HORIZONTAL STABILIZER ACTUATOR SERIE 47142-201 AND 47142-203 ONLY.D.OU190365E.OU190514THE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLE HORIZONTAL STABILIZER ACTUATOR SERIE 47142-201 AND 47142-203 ONLY.F.98A53207606000G.H.THE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLE HORIZONTAL STABILIZER ACTUATOR SERIE 47142-201 AND 47142-203 ONLY.J.THE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLE HORIZONTAL STABILIZER ACTUATOR SERIE 47142-201 AND 47142-203 ONLY.K.Tool - Brake Testing, THS ActuatorPin - Rigging, Spool Control Gear Box (Qty. 2)Panels - Floor, Fuselage Tail Section TORQUE Wrench up to 0.5 m.daN (45 lbf.in) Corrosion-Resistant Steel Lockwire,0.6 mm (0.024 in.) dia.Corrosion-Resistant Steel Lockwire,0.8 mm 0.032 in.) dia.THE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLE HORIZONTAL STABILIZER ACTUATOR SERIE 47142-201 AND 47142-203 ONLY. PackingsReferenced Procedures-(Ref.12-13-27, P. Block 001) -(Ref.24-41-00, P. Block 301) -(Ref.27-41-00, P. Block 501) -(Ref.27-44-13, P. Block 401) -(Ref.29-10-00, P. Block 301)Flight Controls ReplenishingAC External Power ControlMechanical Control (THS)THS Actuator Hydraulic Motor 293174, 291174Main Hydraulic Power - Pressurization/ Depressurization3.ProcedureWARNING:CHECK THAT LANDING GEAR GROUND SAFETIES, INCLUDING WHEEL CHOCKS ARE IN POSITION.BEFORE APPLYING OR RELIEVING HYDRAULIC SYSTEM PRESSURE,MAKE CERTAIN THAT THE TRAVEL RANGES OF THE CONTROLSURFACES ARE CLEAR.BEFORE PRESSURIZING HYDRAULIC SYSTEMS, CHECK THAT ALLCONTROLS ARE SET TO CORRESPOND WITH THE ACTUAL POSITIONOF THE SERVICES THEY OPERATE.BEFORE PROCEEDING WITH MAINTENANCE WORK ON OR NEARMECHANICAL FLIGHT CONTROLS OR PRIMARY FLIGHT CONTROLSURFACES, LANDING GEARS, ASSOCIATED DOORS OR ANY MOVINGCOMPONENT, MAKE CERTAIN THAT GROUND SAFETIES AND/ ORWARNING NOTICES ARE IN CORRECT POSITION TO PREVENTINADVERTENT OPERATION OF CONTROLS.A.Job Set-Up(Ref. Fig.501)(1)Position access platform and open access door 312AR.(3)Connect electrical ground power unit and energize theaircraft electrical network (Ref.24-41-00, P. Block301) .(4)Make certain that electronics racks ventilation iscorrect.(5)Pressurize hydraulic systems (Ref.29-10-00, P. Block301) .(6)Make certain that the following circuit breakers areclosed:PANEL SERVICE IDENT.LOCATION21VU 21VU 21VU 21VU 21VU 21VU 127VU 127VU FAC 1/28VDCFAC 1/115VACFAC 1/26VACFAC 2/26VACFAC 2/115VACFAC2/28VDCFLT CTL/SERVO CTL& THS/HYD SELFLT CTL/SERVO CTL& THS/JAM DETTHE FOLLOWING CHECK IS DEMANDED FOR TRIMMABLEHORIZONTAL STABILIZER ACTUATOR SERIE 47142-201AND 47142-203 ONLY.306CC1309CC1305CC1305CC2309CC2306CC21CB2CB103/G 3103/G 5103/G 7103/G 8103/G10103/G12701/R64701/R65(7)Move trimmable horizontal stabilizer (THS) to neutralposition.(8)Depressurize hydraulic systems (Ref.29-10-00, P. Block301) .(9)Display warning notices in flight compartment prohibitingoperation of pitch controls.(10)Install fuselage tail section floor panels P/N98A53207606000.B.Actuator synchronization check(Ref. Fig.501)(1)Remove cap from manual-drive input to observe RH motorshaft rotation.(2)Pressurize green and yellow hydraulic systems(Ref.29-10-00, P. Block 301) .(3)Make certain that G and Y pushbutton switches on SERVOCTL section of panel 428VU are pressed in (legends off).(4)Check motor shaft for absence of rotation.-if motor shaft rotates permanently without any inputorder to the HSA, a desynchronization is present whichcould have already damaged the hydraulic motors.Proceed with step 3. D.NOTE:Motor shaft rotates few turns and stops, is anacceptable behaviour.NOTE:Before further adjustment replace bothhydraulic motors (Ref.27-44-13, P. Block401) .-if motor shaft does not rotate, proceed as follows:(5)Release G and Y pushbutton switch on SERVO CTL section ofpanel 428VU.CAUTION:MAKE CERTAIN THAT 3/8 INCH SOCKET IS PROPERLYSECURED ON THEEXTENDER AND WILL NOT FALL INSIDE THE HSACASING DURINGCONNECTION/DISCONNECTION OPERATION.(6)FED 436Remove breather and install brake testing tool P/NOU190365 to check LH motor shaft rotation.NOTE: A 3/8 inch socket on a 150 mm (5.9 in.)extender may be used as alternative.(7)Press G and Y pushbutton switch on SERVO CTL section ofpanel 428VU.CAUTION:DO NOT OPERATE THS ACTUATOR AT HIGH SPEED WHENTHE BRAKETESTING TOOL P/N OU190365 (OR EXTENDER/SOCKET)IS FITTEDOR ACTUATOR IS NEAR THE UPPER OR LOWER STOPS.(8)FED 436On horizontal stabilizer actuator, smoothly rotatemechanical input connecting shaft in the nose updirection (THS moves down) and determine which motor isrunning first.(9)Smoothly rotate mechanical input connecting shaft in thenose down direction (THS moves up) and check that samemotor as determined in step (8) is running first and bothmotors rotate in same direction.-if not, the actuator is slightly desynchronized, proceed directly with adjustment procedure step 3. C.NOTE:Synchronization is also achieved when the twohydraulic motors are starting at the same timein nose up or nose down, or in both direction.-if yes, the actuator is correctly synchronized.(10)Release G and Y pushbutton switch on SERVO CTL section ofpanel 428VU.(11)Remove brake testing tool P/N OU190365 or 3/8 socket andextender.(12)Install breather.(13)Install cap on manual drive input.(14)Carry out functional test of trimmable horizontalstabilizer (Ref.27-41-00, P. Block 501) .C.Adjustment procedure in case of slight desynchronization(Ref. Fig.501)NOTE:Slight desynchronization is present when the samemotor is not starting first in nose up and nose downdirection when rotating smoothly the HSA mechanicalinput shaft.CAUTION:DURING THIS ADJUSTMENT ONLY THE RH ECCENTRIC MUST BEREADJUSTED. THE LH ECCENTRIC MUST NOT BE ADJUSTED,IT IS USEDAS REFERENCE FOR SYNCHRONIZATION ADJUSTMENT.(1)To gain access to RH transmission, proceed as follows:(a)Cut and remove lockwire from RH protection sleeve(1).(b)Screw protection sleeve (1) into protection sleeve(2) until thread disengages and slide protectionsleeve (1) into protection sleeve (2), to gainaccess to eccentric (3).CAUTION:MAKE CERTAIN THAT 3/8 INCH SOCKET ISPROPERLY SECURED ON THEEXTENDER AND WILL NOT FALL INSIDE THEHSA CASING DURINGCONNECTION/DISCONNECTION OPERATION.(2)FED 436Remove breather and install brake testing tool P/NOU190365 to check LH motor shaft rotation.NOTE: A 3/8 in. socket on a 150 mm (5.9 in.)extender may be used as alternative.CAUTION:DO NOT OPERATE THS ACTUATOR AT HIGH SPEED WHENTHE BRAKETESTING TOOL P/N OU190365 (OR EXTENDER/SOCKET)IS FITTEDOR ACTUATOR IS NEAR THE UPPER OR LOWER STOPS.(3)FED 436On horizontal stabilizer actuator, smoothly rotatemechanical input connecting shaft in the nose updirection (THS moves down) and determine which motor isrunning first.(4)Smoothly rotate mechanical input connecting shaft in thenose down direction (THS moves up) and check that samemotor as determined in step (5) is running first and bothmotor rotate in same direction.NOTE:Synchronization is also achieved when the twohydraulic motors are starting at the same timein nose up or nose down, or in both direction.-if not, slightly loose screw (4), slightly rotate RHeccentric and tighten screw (4).(5)Repeat steps (3) and (4), checking which motor is runningfirst.(6)When the synchronization is correct, TORQUE screw (4) tobetween 0.3 and 0.4 m.daN (26.55 and 35.40 lbf.in).(7)Safety screw (4) with lockwire 0.6 mm (0.024 in) dia.(8)On RH transmission coupling/drive shaft assembly slideprotection sleeve (1) outwards, then screw out protectionsleeve (2) until contacting THS actuator housing andsafety with lockwire 0.8 mm (0.031 in.) dia.(9)Remove brake testing tool P/N OU190365 or 3/8 socket andextender.(10)Install breather.(11)Install cap on manual-drive input.(12)Remove fuselage tail section floor panels P/N98A53207606000.(13)Carry out functional test of trimmable horizontalstabilizer (Ref.27-41-00, P. Block 501) .D.Adjustment procedure in case of significant desynchronization(Ref. Fig.501)NOTE:Significant desynchronization is present in case apermanent rotation of the right hand hydraulic motorshaft is detected when the green and yellow hydraulicsystems are pressurized without any input order tothe HSA.NOTE:At this stage, the motors should have already beenreplaced (Ref.27-44-13, P. Block 401) .(1)With hydraulic systems pressurized (G and Y pushbuttonswitches on SERVO CTL section of panel 428VU are pressedin) manually move the actuator to neutral position untilrigging pin P/N OU190360 can easily be installed in THSactuator input lever.(2)Release G and Y pushbutton switch on SERVO CTL section ofpanel 428VU and depressurize hydraulic systems.(3)Drain THS actuator oil (Ref.12-13-27, P. Block 001) .(4)Cut and remove lockwire from mechanical stops (5).(5)Remove mechanical stops (5), discard packings (6) andinstall rigging pins P/N OU190514 in spool controlgearbox outputs.(6)To gain access to LH and RH transmission, proceed asfollows:(a)Cut and remove lockwire from RH and LH protectionsleeve (1).(b)Screw protection sleeve (1) into protection sleeve(2) until thread disengages and slide protectionsleeve (1) into protection sleeve (2), to gainaccess to sliding shaft (7).CAUTION:DO NOT DEFORM TRANSMISSION COUPLING (8)WHEN RETRACTINGSLIDING SHAFT (7).(7)Disconnect RH sliding shaft (7) from yoke hinge (9) asfollows:(a)Cut and remove lockwire from screw (10).(b)Loosen screw (10) and retract sliding shaft (7)into coupling (11) against spring (12).(c)Tighten screw (10) to hold sliding shaft (7) inthe retracted position.(8)On RH side of the THS actuator (green system) slightlyuntighten screw (10) so that sliding shaft (7) is pushedout by spring (12).(9)Check that the sphere on the valve block control shaft isproperly centered and engaged in the recess of slidingshaft (7) and that the fork of sliding shaft (7) fits toeccentric (3).-if yes, the RH valve block is considered at neutral position.-TORQUE screw (10) to between 0.3 and 0.4 m.daN (26.55 and 35.40 lbf.in) and safety with lockwire 0.6 mm(0.024 in.) dia.NOTE:Would a slight rotation of the valve blockinput shaft/sliding shaft /fork be necessaryto fit to the eccentric, it would cause aspool valve offset and THS actuatordesynchronization:-if not, proceed as follows:(a)Unscrew again screw (10) and retract sliding shaft(7).(b)Tighten screw (10) to hold sliding shaft (7) inretracted position.(c)Slightly untighten screw (4) to allow freerotation of the eccentric (3).(d)Untighten screw (10) so that sliding shaft (7) ispushed out by spring (12).-check that the eccentric positioning is achievedby the fork of sliding shaft (Self aligning theeccentric).-if not, slightly rotate the eccentric so that thefork of sliding shaft (7) freely fits theeccentric.(e)TORQUE screws (4,10) to between 0.3 and 0.4 m.daN(26.55 and 35.40 lbf.in) and safety with lockwire0.6 mm (0.024 in.) dia.(10)Repeat procedure in step (6) and (9) on the LH side.(11)Remove rigging pins P/N OU190514 from spool controlgearbox outputs.(12)Fit new packings (6) to mechanical stops (5).(13)Install mechanical stops (5) and secure with lockwire 0.8mm (0.032 in.) dia.(14)Remove rigging pin P/N OU190360.(15)Replenish THS actuator oil (Ref.12-13-27, P. Block 001)CAUTION:MAKE CERTAIN THAT 3/8 INCH SOCKET IS PROPERLYSECURED ON THEEXTENDER AND WILL NOT FALL INSIDE THE HSACASING DURINGCONNECTION/DISCONNECTION OPERATION.(16)FED 436Remove breather and install brake testing tool P/NOU190365 to check LH motor shaft rotation.NOTE: A 3/8 inch socket on a 150 mm (5.9 in.)extender may be used as alternative.CAUTION:DO NOT OPERATE THS ACTUATOR AT HIGH SPEED WHENTHE BRAKETESTING TOOL P/N OU190365 (OR EXTENDER/SOCKET)IS FITTEDOR ACTUATOR IS NEAR THE UPPER OR LOWER STOPS.(17)FED 436On horizontal stabilizer actuator, smoothly rotatemechanical input connecting shaft in the nose updirection (THS mover down) and determine which motor isrunning first.(18)Smoothly rotate mechanical input connecting shaft in thenose down direction (THS moves up) and check that samemotor as determined in step (6) is running first and bothmotors rotate in same direction.NOTE:Synchronization is also achieved when the twohydraulic motors are starting at the same timein nose up or nose down, or in both direction.CAUTION:DURING THIS ADJUSTMENT ONLY THE RH ECCENTRICMUST BEREADJUSTED. THE LH ECCENTRIC MUST NOT BEADJUSTED ANYMOREAS IT IS NOW USED AS REFERENCE FORSYNCHRONIZATION ADJUSTMENT.FED 436-if not, loose screw (4), slightly rotate RH eccentric(3) and tighten screw (4).(19)Repeat steps (17) and (18), checking which motor isrunning first.(20)Release G and Y pushbutton switch on SERVO CTL section ofpanel 428VU.(21)When the synchronization is correct TORQUE screw (4) tobetween 0.3 and 0.4 m.daN (26.55 and 35.40 lbf.in) andsafety with lockwire 0.6 mm (0.024 in.) dia.(22)On both transmission coupling/drive shaft assembly slideprotection sleeve (1) outwards, then screw out protectionsleeve (2) until contacting THS actuator housing andsafety with lockwire 0.8 mm (0.031 in.) dia.(23)Remove brake testing tool P/N OU190365 or 3/8 socket andextender.(24)Install breather.(25)Install cap on manual drive input.(26)Remove fuselage tail section floor panels P/N98A53207606000.(27)Carry out functional test of trimmable horizontalstabilizer (Ref.27-41-00, P. Block 501) .E.Close-Up(1)Remove fuselage tail section floor panels P/N98A53207606000.(2)Make certain that working area is clean and clear oftools and miscellaneous items of equipment.(3)Close access door 312AR.(4)Remove access platform.(5)De-energize the aircraft electrical network (Ref.24-41-00, P. Block 301) and disconnect electrical groundpower unit.FED 436Figure 501Figure 501.Valve Blocks Synchronization(Sheet 1)。
飞行器动力系统的设计与调试技巧
飞行器动力系统的设计与调试技巧飞行器的动力系统是其核心部分之一,直接关系到飞行器的性能、安全和稳定性。
设计和调试一个高效可靠的动力系统是飞行器研发过程中的重要任务。
本文将介绍飞行器动力系统设计和调试的一些关键技巧。
1. 定义需求和目标在设计一个飞行器动力系统之前,首先需要明确飞行器的需求和目标。
这包括飞行器的类型、使用场景、载荷等。
根据需求和目标来确定动力系统的功率、燃料类型、推进方式以及其他相关参数。
2. 选择适当的发动机发动机是飞行器动力系统的核心部件,选择适当的发动机非常关键。
需要考虑的因素包括功率输出、燃料效率、可靠性和重量等。
在选择发动机时,还需要考虑飞行器的尺寸、重量和飞行速度等因素。
3. 设计出适当的燃料供应系统燃料供应系统的设计也是非常重要的一步。
它需要提供足够的燃料,并确保在高速飞行时稳定供应。
燃料供应系统还需要考虑燃料泄漏、燃烧效率和可靠性等因素。
4. 设计合理的推进系统推进系统是将发动机产生的动力转化为飞行推力的重要组成部分。
设计合理的推进系统可以提高飞行器的速度、提供足够的推力并对飞行器进行良好的操控。
推进系统的设计需要考虑推力的大小、方向和稳定性等因素。
5. 可靠性和安全性考虑在设计飞行器动力系统时,可靠性和安全性是至关重要的。
为了确保系统的可靠性,可以采取一些措施,如备用系统、故障检测和故障转移等。
此外,还需要考虑系统的安全性,包括防止燃料泄漏和发动机过热等问题。
6. 进行系统调试在设计完成后,需要进行系统的调试和测试。
在调试过程中,需要检查每个组件的性能和相互之间的配合情况。
调试过程中可以通过实验和模拟等方法进行,并逐步优化系统的性能直到满足预定的设计要求。
7. 数据收集和分析在进行实验和测试时,需要收集大量的数据,并进行详细的分析。
数据分析可以帮助我们了解系统的性能表现,并指导后续的改进和优化工作。
同时,数据还可以用于制定更好的调试策略和方法。
8. 对系统进行优化根据实验和数据分析的结果,可以对系统进行优化。
无人机遥控器校准与调试步骤
以下是无人机遥控器校准与调试的步骤:
一、校准:
1. 开启遥控器,同时连按7下遥控器上和摇机上的按键,填充遥控器的蓝牙。
2. 输入设置飞行器的WIFI密码,开启遥控器的权限。
3. 打开DJI GO,进入界面,点击“编辑”按钮,开始进入校准向导。
4. 校准镜头,点击下一步,轻微拨动摇机镜头,遥控器窗口跟随旋转,停止旋转时点击下一步。
5. 对云台对焦,拨动摇机对焦环,遥控器窗口光标跟随移动,停止移动时点击完成。
二、调试:
1. 调整摇杆灵敏度:首先找到设置菜单,进入后找到摇杆设置,然后调节灵敏度。
灵敏度会受到环境、使用环境等因素的影响,建议多尝试几次。
2. 校准遥控器:在飞行前需要校准遥控器,确保遥控器能够正常工作。
具体步骤可以参考使用手册或者官网的指南。
3. 检查遥控器电池电量:电量不足会影响遥控器的正常工作,需要及时更换电池。
4. 避免使用环境恶劣:在恶劣环境下使用遥控器可能会影响其性能,比如过于潮湿或者温度过低的环境。
5. 定期清理遥控器:灰尘等杂物可能会影响遥控器的正常工作,可以使用软布擦拭干净。
注意事项:在进行任何调试或校准之前,一定要备份你的设备数据,防止在更改设置或使用过程中丢失数据。
调试过程可能会涉及软件和硬件的设置更改,务必小心操作,也可以先咨询官方客服意见再执行。
完成以上步骤后,你应该能够成功地校准和调试你的无人机遥控器。
记得定期检查和保养遥控器,确保它的性能始终如一。
对于飞行安全和飞行体验的提升,一个好的遥控器是至关重要的。
在使用无人机时,一定要注意安全,遵守相关法规和操作指南,以确保你和周围人的安全。
飞行器操作方法
飞行器操作方法飞行器是一种现代的交通工具,能够有效地缩短人们的距离,让我们能够快速地到达目的地。
但是,飞行器是一种高科技的机器,需要非常专业的操作方法,才能有效地控制它进行飞行。
下面我将为大家介绍一下飞行器的操作方法。
首先,操作前需要对飞行器进行检查。
打开飞行器的电源,检查仪表盘上的各种指示灯是否正常,包括油量、温度、电压等。
检查是否有泄漏,包括燃油泄漏、机油泄漏等。
检查发动机是否正常,检查是否有任何异常的声音或震动。
接着,调整飞行器的发动机和螺旋桨。
调整发动机的油门和襟翼,以确保发动机能够顺利启动,螺旋桨的旋转速度也要适当调整,以防止过热或过冷。
然后,进行起飞操作。
在起飞前,需要沿着跑道移动,在加速时适当地拉起机头。
当飞行器加速到一定速度时,需要适当地拉起机头,待机翼产生升力时,飞行器就能够离地起飞。
在起飞过程中,要注意飞行器保持水平,以防止飞行器的倾斜。
进行飞行时,需要定期调整飞行器的高度和姿态。
当高度过低或过高时,都需要适当地调整飞行器的高度。
当飞行器的姿态不稳定时,可以通过操纵机翼,来使飞行器保持稳定的姿态。
最后,进行着陆操作。
在降落前,需要减速,在降低速度时适当地调整机头角度,以及调整发动机的油门和襟翼,以确保着陆时飞行器的速度和姿态保持正常。
着陆时也要注意保持飞行器的稳定,避免对地面的冲击过大,造成危险。
总之,飞行器的操作需要非常专业的技能和经验,只有经过严格的培训和实践,才能掌握正确的操作方法,确保飞行的安全和顺利。
飞行器调试与试飞
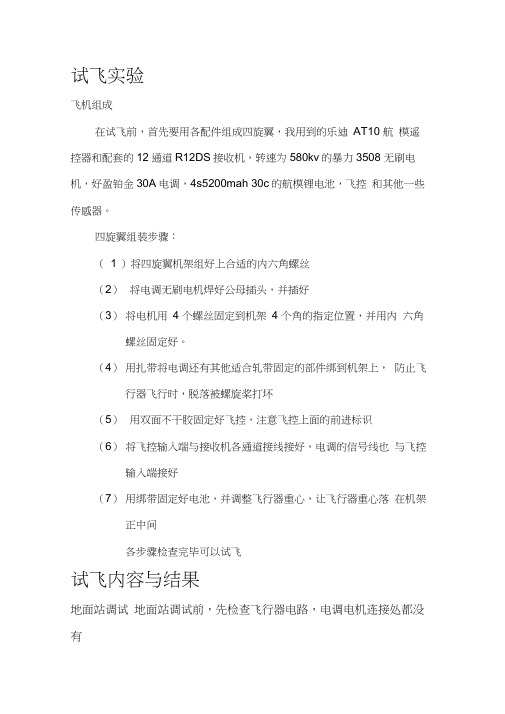
试飞实验飞机组成在试飞前,首先要用各配件组成四旋翼,我用到的乐迪AT10 航模遥控器和配套的12通道R12DS接收机,转速为580kv的暴力3508 无刷电机,好盈铂金30A电调,4s5200mah 30c的航模锂电池,飞控和其他一些传感器。
四旋翼组装步骤:(1 )将四旋翼机架组好上合适的内六角螺丝(2)将电调无刷电机焊好公母插头,并插好(3)将电机用4 个螺丝固定到机架4 个角的指定位置,并用内六角螺丝固定好。
(4)用扎带将电调还有其他适合轧带固定的部件绑到机架上,防止飞行器飞行时,脱落被螺旋桨打坏(5)用双面不干胶固定好飞控,注意飞控上面的前进标识(6)将飞控输入端与接收机各通道接线接好,电调的信号线也与飞控输入端接好(7)用绑带固定好电池,并调整飞行器重心,让飞行器重心落在机架正中间各步骤检查完毕可以试飞试飞内容与结果地面站调试地面站调试前,先检查飞行器电路,电调电机连接处都没有漏焊,其后检查电调与飞控输出端,飞控与接收机输入端的接线有没有错误。
各通道对应的电机是否无误,检查扎带绑处是否松动以防飞行时被螺旋桨打到,仔细检查后,没有问题,可以插上电池进行地面站调试。
(1)机型选择本次实验所用的调试软件是Mission Planner ,选择机架类型,所用地面站调试软件完全开源,支持多种机型,我选折四旋翼。
(2)加速度计校准与水平校准先开始水平校准,将飞行器水平放置,点击开始水平校准,水平放置一秒,完成校准,其后校准加速度计,分别将飞行器正面向上,正面向下,正面往左,正面往右,依次放置,跟随软件提示,完成校准(2) 罗盘校准选用飞控自带内部罗盘,但精度太低,不能完成定点,悬停,跟随,绕圈,等飞行模式,为更好的让飞行器完成多类飞行模式,选用外置罗盘(GPS支持北斗系统,搜星块,空旷地域,搜星量足,能够满足飞行器多类飞行模式。
分别给Use the Copass和Ertermally前打上勾,开始罗盘校准,依据提示完成校准(3)遥控器校准打开遥控器,图中PITCH代表俯仰,ROLL代表翻滚,yaw代表侧飞,ThrottI代表油门,拨动遥控器,看数值与遥控是否—致,拨动辅助通道,完成校准ci^X1,15765.19209 Ardu( ■- V321飞行晒wss 醉碉试ft电««« 飞奋犠式*Wtt1Pttw ;线議 W Panner 1 332飞行测试第一次试飞软件参数没有调试好,飞行器无故失控。
飞机调试指南
飞行指南:
一、检视模型
从模型头部直视,安装完好的模型应无扭曲,并且左右对称。
二、模型调整
无风或微风状态下,手持机头重心位置将模型轻轻掷出。
根据模型飞行姿态调整翼台前后距离。
波状飞行表示头轻,需将翼台向后移;向下俯冲表示头重,需将翼台向前移。
三、动力飞行
先将螺旋桨按顺时针方向绕15圈左右,然后右手持机左手扶桨,迎风轻轻推出。
观察飞行轨迹,盘旋上升姿态为最佳。
如发现模型盘旋半径过小,将垂直尾翼根部切一小口后向相反方向弯曲即可。
飞行姿态正常后绕橡筋200~220圈做大动力飞行。
飞行器使用手册

飞行器使用手册一、前言飞行器是一种高度复杂的机械装置,使用者在操作飞行器时需要掌握一定的知识和技能。
本手册旨在向使用者提供全面的飞行器使用指南,以确保飞行的安全和顺利进行。
二、飞行器概述1. 飞行器分类飞行器可分为固定翼飞机、直升机、多旋翼飞行器等多种类型。
使用者在操作飞行器前应了解其所属类型及特点。
2. 飞行器结构飞行器主要由机身、机翼、动力系统、操纵系统等组成。
使用者应熟悉飞行器的结构,以便在使用过程中能够正确操作和维护。
三、飞行器准备1. 飞行器检查在每次飞行前,使用者应对飞行器进行全面的检查,包括但不限于机身完整性、动力系统运行状态、操纵系统灵活性等。
如发现异常情况,应及时进行修复或更换。
2. 飞行器参数设置根据飞行器的型号和使用环境,使用者应正确设置飞行器的参数,包括飞行模式、飞行高度限制、飞行速度等。
参数设置的准确性直接关系到飞行器的安全性和性能。
四、飞行器操作1. 起飞在起飞前,使用者应确保飞行器处于合适的位置,并清除周围的障碍物。
在起飞过程中,应平稳提升飞行器,并注意保持适当的升力和姿态。
2. 飞行在飞行过程中,使用者应时刻关注飞行器的姿态和飞行状态。
合理调整飞行器的速度和高度,避免与其他飞行器或障碍物发生碰撞。
3. 降落降落是飞行的最后一个环节,使用者应选择合适的降落区域,并掌握好降落的时机。
在降落过程中,应保持飞行器的稳定,并注意避免过度冲击。
五、飞行器维护1. 清洁保养定期对飞行器进行清洁,包括机身、机翼、螺旋桨等部分。
使用者应使用合适的清洁剂和工具,避免对飞行器造成损害。
2. 零部件检查定期检查飞行器的零部件,包括但不限于电池、电机、传感器等。
如发现损坏或老化的零部件,应及时更换以确保飞行器的正常运行。
六、飞行器安全1. 飞行环境选择在选择飞行环境时,使用者应遵守相关法规和规定,选择开放、无障碍物和无人员的区域进行飞行。
避免飞行器对他人和财产造成伤害。
2. 天气条件考虑在不利的天气条件下,如大风、雨雪等,应避免飞行,以确保飞行器和使用者的安全。
DJIGOapp新手教程(飞控参数设置)

DJIGOapp新⼿教程(飞控参数设置)近年底,玩⼤疆⽆⼈机也快半年的时间了,从⼀位准新⼿变成⼀位新⼿。
并且⾃⼰在论坛默默潜⽔了这么久,感觉也应该为论坛、为各位爱好者们做些贡献。
步⼊正题进⼊飞⾏器【相机界⾯】把【相机界⾯】分成下⾯⼏个区域,我会结合各个部分和⼤家⼀起探讨。
【飞控参数设置】-点击进⼊1.新⼿模式新⼿模式开启后会怎么样呢?1.【限⾼】和【距离限制】30m!!!飞机到达限⾼和距离限制后,像有⼀堵空⽓墙⼀样,没办法越过。
2.卫星信号不好的条件下⽆法起飞(如室内)!!!—新⼿刚收到飞机之后可以在家⾥【关闭】新⼿模式,检查电机是否可以启动切记:如果【新⼿】要进⾏实际飞⾏,还是要【开启】新⼿模式退出【飞控参数设置】——点击左下⾓【地图】新⼿模式在地图的表现形式是如何的呢?已起飞点为半径,有⼀个30m的圆形区域限制2.限⾼和距离限制关闭新⼿模式,开启限⾼、距离限制注意:输⼊完数值之后,⼀定要点Done限远调成500m后,地图是如何显⽰的呢?3.操纵⼿感设置操纵⼿感EXP:EXP值反应了您打杆量与飞机相应量之间的逻辑关系,X轴为您的打杆量,在打杆量相同的情况下,EXP值不同,Y轴反应的输出量也有所不同;通俗的讲X轴就是我们【把遥感推了多少】Y轴就是我们【飞机的实际响应值】做个类⽐我有50块,可以买50块钱的东西【但是我调节的EXP之后】我有50块,我可以买70块钱的东西还有⼀种可能,我有50块,只能买30块钱的东西了函数解释假如我打50%的油门杆(美国⼿),下图反应的就是函数曲线的X轴通过下图我们可以看到X轴都是50%,但是Y轴(也就是飞机的实际响应值)是截然不同的⼩结:相同的摇杆输⼊,数值越⼤飞机响应就越⼤(新⼿可以把数值调低⼀点或者默认)当然⼤家有兴趣可以⾃⼰调到最⼤进⾏尝试,⾃⼰的感觉⽐别⼈说的要更直观!!!!!!!!!(注意安全)!!!!!!!!!!!!!!!!4.灵敏度设置姿态灵敏度:调节飞机个个姿态的响应快慢刹车灵敏度:⼤家把飞机想象成汽车就可以了,刹车灵敏度就是刹车的快慢。
直升机调整教程
平衡直升飞机以实现难以置信的流畅飞行我实在不明白对平衡微型直升机旋翼系统方面信息的需求会如此巨大。
此文就是我在美军服役期间,对直升机所了解到的一切,以及如何将这些理念应用到微型直升机上。
为什么要平衡直升机呢?平衡会让它飞得更容易。
如果你花时间掌握以下技巧,你将不仅仅能流畅的飞行你的直升机,你的直升机不用手控制都将能短暂悬停一会(无风环境下),我个人的最佳记录是十七秒(我感觉简直有一分钟那么久,但秒表不会撒谎)本文适用于所有直升机包括Blade CP, FP, Honeybee CP, CP2和其他所有单旋翼直升机。
要流畅飞你的微型直升机,并实现不用手操作,以下就是你将要学习的保证主轴装的正,不会晃(如果晃,就把它改过来,这并不难,这是要点耐心)平衡旋翼头(以及平衡翼(fly bar)桨)动态平衡旋翼桨片(重量和重心)平衡尾翼桨(我知道它们是塑料的,但它们没一个能完美平衡,平衡好后它们将不会抖动并发出嗡嗡的声音)最后,一旦组装好直升机,你就应平衡好直升机的前后重心。
当你安装电池时,你要保证重心恰好在主轴下其他要注意和需要检查的东西:确保平衡翼桨笔直,检查桨片方向是否正确(很简单?我就错过一次)跟踪(标记)你的飞机桨,这样它们就会用在同一架飞机里(在常规悬停速度下)随后发射机上作些微调,你就有了一架把手放开都可以悬停几秒的直升机了。
就怎么多!(当然,我花了整整九个月才研究出这些,我就是把在全尺寸军用机的那些应用过来,按比例缩小用到我们的RC小直升机上)精调主轴主驱动轴是用相对比较软的钢材制作的。
其优势在于在碰撞中它会弯曲,从而不会破坏直升机的其他部分(如机体和轴承),缺点就是(一段时间后)要么得更换掉,或者是很麻烦的重新精调它。
弯曲的主轴会让旋翼头晃动,控制将更为困难。
在更高转速下,它会让你的旋翼头总成磨损的快很多。
你将得把整个旋翼部分从直升机上换掉。
在Honeybee系列(主轴)上有时会有些毛刺,在把它滑出机体前,你需要用些细砂纸把它磨光。
F3飞控调参设置及介绍
模式介绍ARM 解锁ANGLE 自稳HORIZON 半自稳能自动会中,但大幅度打杆也可以翻滚BARO 气压定高AIR MODE 空中模式,收油到底点击不会停转MAG 启用磁罗盘更好的锁尾HEADFREE 无头模式HEADADJ 重新指定无头模式的方向,需看清当前的头尾方向,按当前方向确定无头模式BEEPER 蜂鸣器寻机OSD SW osd锁定FAILSAFE 失控GTUNE 调参发帖字数限制所以只好分贴了,请各位见谅2.PID的诊断PID的调整到怎样一个程度才是合适的呢?我们要遵循以下几点(1)平滑的陀螺仪曲线(gyro traces),调整到尽量可能少的噪声和震荡(2)平滑的电机输出,尽可能的静音和不激进。
如果电机的输出过于暴躁将会引起电机和电调过高的温度,同样一个电池的续航能力也会缩短。
(3)遥控对陀螺仪曲线(gyro traces)的影响要小。
我一般用两张曲线图:图表一、rcCommand、gyro;图表二、PID_P, PID_I, PID_D, PID_sum。
这些图主要用在Roll,Pitch的调解中,Yaw调节是单独的。
图表一主要展示给我们你输入值的改变在陀螺仪(gyro)中引起的变化,并且也展示了PID的改变如何影响陀螺仪(gyro)。
图表二是最重要的图表,它反映了PID值的改变带来的飞机响应的变化。
P----完美的P值能使得gyro的噪音尽可能的低。
P值线有一些涟漪是正常的,但是要在一个合理的范围内。
较高的P值会会增加噪音以至于影响gyro的曲线,会使增加曲线的涟漪(较慢频率的震荡)。
D----完美的D值是与P值有联系的,更确切的说是在的到完美P值之前得到的,其与P值的重要性相等。
然而D值的噪音一般来说都会比P值要大,所以通常都会是D值保持一个较低的值。
I-----I值的调节其实可以忽略,这个值的调节一般在飞行的时候调节。
一般将I值保持较低的值,除非在飞行的时候感觉比较飘或者下降的时候感觉到飞机震荡再去增加I值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
教你调试单轴飞行器
作者:
来源:《航空模型》2012年第07期
笔者曾在本刊2012年第3期发表过一篇名为“一款…KK‟板单轴飞行器”的文章,受到了大家的关注。
因有读者咨询如何刷写和调试“KK”飞控板,故笔者特意总结了单轴刷写模式和调试的方法,与爱好者共享。
将“KK”飞控板刷写为单轴模式
刷写“KK”飞控板前,需做以下准备工作:
1.在“KK”飞控板网站http://www.kkmulticopter.kr/index.html?modea=xxcontroller下载单轴飞行器所需的程序XXcontrol_KR_SingleCopter或在百度上搜索关键字
“XXcontrol_KR_SingleCopter”;
2.在相关网站下载或向“KK”板销售商家索取软件PROGISP(Ver 1.72),该软件可将飞控程序Xcontrol_KR_SingleCopter刷入KK板中;
3.准备一个ISP下载器,可与“KK”飞控板一同购买,价格约20元,商家大多已将其接口改好(图1)。
准备工作完成后,开始刷写。
首先将ISP下载器连接到“KK”飞控板上。
注意地线靠内、信号线靠外(图2),不要连错。
接下来将ISP下载器连接到电脑上,系统会自动安装其驱动程序。
若电脑不能自动安装驱动程序,可下载安装USB万能驱动程序后再尝试。
打开已下载好的PROGISP程序,其界面如图3。
选择单片机型号ATmega168PA,并勾选必要设置。
接下来写熔丝位,点击界面上的“oxF9DF62”选项(图4),弹出写熔丝位对话框。
在写熔丝位窗口的低位值、高位值和扩展位值上分别填上“E2”、“ DE”和“ FF”,点击“写入”选项,完毕后关闭写熔丝位窗口(图5)。
熔丝位数值须填写正确,否则会使飞控发生不可预料的问题:如若高位值写错,可能会锁死单片机的ISP功能。
选择已下载好的“KK”固件,并将后辍命名为“.hex”(图6)。
完成后点击“自动”选项(图7),电脑显示刷写进度。
待进度显示完成后,拔下“KK”飞控板。
至此单轴飞行模式刷写完成。
设置“KK”飞控板
在调试单轴飞行器的过程中,笔者总结出了一套简单实用的“KK”飞控板设置方法。
设置前要取消模型上所有的混控,并拆下螺旋桨,防止其意外旋转伤人。
平衡设置。
在飞控板断电的前提下,将中间的电位器旋钮沿逆时针方向调至最小;将单轴飞行器放在水平面上,接通飞控板电源;“KK”飞控板指示灯会先快闪3下,约3秒钟后再亮一下;切断电源,将电位器旋钮回旋至中间位置。
平衡设置完成。
电调设置(油门行程)。
与普通的电调设置完全一样,模友可直接将电调与接收机或设置卡连接后完成设置,不需连接“KK”飞控板(能够正常使用的电调,可忽略该设置)。
解锁“KK”飞控板。
正确的方法是将油门关至最小,向左打方向杆。
由于不同的遥控器各通道的极性不同,因此若设置时无法确定通道的正反向,可先尝试将油门杆降至最低,方向杆向左、右各打一次。
若“KK”飞控板未解锁,那么将油门杆推至最高,方向杆再左、右各打一次。
如果飞控板还不能解锁,可尝试将油门通道的微调设至最低(当油门杆在最高时,微调设至最高),再用上述方法解锁。
解锁成功后,“KK”飞控板会亮灯,其提示音和舵机也会有相应提示。
此时可将遥控器各通道的正反向设置好。
陀螺仪极性设置。
若单轴飞行器的舵机摇臂安装在内侧,使用飞控板默认的设置即可,无需重设陀螺仪极性;若安装在外侧,则需反向设置陀螺仪极性。
方法如下:将左侧的 ROLL电位器(因“KK”飞控板安装在单轴飞行器的中间位置,所有ROLL电位器位于机体左侧),逆时针旋转至最小;然后接通电源,把遥控器的副翼摇杆、升降舵摇杆和方向舵摇杆分别向右打、向下和向左打一下;断开电源,将ROLL电位器旋钮居中。
设置完成。
陀螺仪的极性与遥控器各通道的极性无关。
检测其极性时,稍加油门,待舵机开始响应,而电机尚未转动时,拿起机体分别向逆时针和顺时针方向转动(图8)。
若设置正确,尾部的舵面会同向偏转(图9)。
调整试飞
需注意的是,“KK”飞控板刷写了最新的V2.5固件后,舵机的中立点会发生很大变化。
因此要拆下舵机摇臂重新调整,使其与连杆垂直,舵面与水平面垂直。
调整完后,在无风条件下手持单轴飞行器,逐渐加油门使其悬停,感觉飞行器的平衡状态(图10)。
若机体有轻微偏向,可用遥控器微调调整;若偏向严重,则需调整相应舵机连杆。
初学者要手持单轴飞行器起飞。
因为从地面起飞的单轴飞行器受地面效应影响容易偏向,操纵难度较高,加之初学者心理压力大、易慌张,所以起飞即“炸机”的情况经常出现。
起飞后,应进一步微调飞行器,以使其飞行更稳定。
调整好的单轴飞行器性能优异(图11、图12),通常在室内无风环境中可脱控悬停至少5秒。
需注意的问题
制作和调试单轴飞行器过程中,需注意:
1.单轴飞行器的翼展。
有些爱好者为克服反扭矩,将翼展设计得很大,与螺旋桨的直径之比高达5∶1,飞行器自旋严重,不好控制。
笔者前后制作了20多架不同类型的单轴飞行器,最新已至第5版(图13),通过试验得出,翼展和螺旋桨直径比例在2∶1~3∶1间最适合。
2.单轴飞行器自旋。
有些已调试好的单轴飞行器放置一段时间后,飞行时又会自旋,需要打舵才能克服。
这是因为制作单轴飞行器的材料较软,放置时间一长,机体就会有轻微变形,导致自旋。
轻微自旋可通过微调调整,自旋严重时,则要调整4个舵面的连杆。
3.单轴飞行器起飞后偏向一边。
可能是飞行器左、右重量不一致造成的(图14),可通过移动动力电池、接收机或电调位置调整,使重量分布平衡;也可能是陀螺仪极性设置错误引起的,需检查后重新设置。