鄂尔多斯:硅铁价格上涨,2010年净利或增97%,预计2010年每股收益0.75元
人类历史上几次大规模传染病 史上的大规模疫情有哪些?
每一次的全球性疫情对于人类来说都是一次苦痛的灾难,面对着自然界带来的各种疾病,即使是在科学发达的今天,仍然存在着很多无法攻克的病毒难题。
更不用说在科学尚未发达的过去。
今天科普君来盘点一下,人类历史上的几次全球性的疫情:一、流行性感冒不要以为流行性感冒的名字里有“感冒”两字,就以为与寻常感冒差不多,然后忽略了这个疾病的危害和严重性,流感与普通感冒有着本质(病原)的区别。
流感病毒主要通过空气中的飞沫、易感者与感染者之间的接触或与被污染物品的接触而传播。
一般秋冬季节是其高发期。
人流感主要是甲型流感病毒和乙型流感病毒引起的。
流感相比于普通感冒有着更高的危害性与大规模传播的可能性。
例如造成至少2500万人死亡的“西班牙流感”,和我们可能亲身经历过的“2009年甲型H1N1流感”。
流感在何时最早出现已无从考证,但最早在公元前412年,人称“医学之父”的希波克拉底便已记录下了被认为是流行性感冒的疾病的大肆流行。
20世纪到21世纪为止,人类总共经历了4次流感大爆发,分别是西班牙流行感冒、亚洲流感、香港流感和09年甲型H1N1流感(也称猪流感).被认为是禽流感的一种的西班牙流行性感冒于1918年开始在美利坚合众国的士兵之间流行开来,成为了人类所遭遇的第一次流感大流行,随着美军出征第一次世界大战而横渡大西洋,自5月到6月间开始在欧洲流行开来。
第2波开始于1918年秋季,几乎是在全世界同时爆发,病原性进一步增强,引起严重的并发症,导致死者剧增。
第3波的时间在1919年春季到秋季,依然形成了世界性流行。
这场流感最终感染者达到5亿人,要知道1918年全球人口总数才接近18亿,也就是接近三分之一的人口感染了“西班牙流感”,而这场流感据保守预计至少造成2500万人死亡。
另外西班牙流感的大流行,加快了第一次世界大战的终结,毕竟各国已经没有可作战的额外兵力了。
另外可能有人会问,为什么西班牙流感发端于美国却被称为“西班牙流感”,这是因为当时正处于在第一次世界大战,一战的各大交战国都有意限制“流感”的舆论,意图渲染为无足轻重的“小感冒”,只有西班牙媒体实诚的将流感称为灾难,甚至于西班牙国王也感染了流感,故这场源于美国的流感便戏剧性的称为“西班牙流感”20世纪另外两次流感,亚洲流感和香港流感分别在世界范围分别造成了200万和100万人死亡。
2010版英特尔移动处理器型号及参数总览表

45nm 45nm 45nm 45nm 45nm
45nm 45nm 45nm 45nm 45nm
35W 35W 35W 35W 35W
Penryn Penryn Penryn Penryn Penryn
Socket P Socket P Socket P Socket P Socket P
Core 2 Duo T9500 Core 2 Duo T9300 Core 2 Duo T8300 Core 2 Duo T8100 Core 2 Duo T6600 Core 2 Duo T6570 Core 2 Duo T6400 低功耗高性能处理器 Core 2 Duo P9700 Core 2 Duo P9600 Core 2 Duo P9500 Core 2 Duo P8800 Core 2 Duo P8700 Core 2 Duo P8600 Core 2 Duo P8400 Core 2 Duo P7570 Core 2 Duo P7550 Core 2 Duo P7450 Core 2 Duo P7370 Core 2 Duo P7350 小封装处理器 Core 2 Duo SP9600 Core 2 Duo SP9400 Core 2 Duo SP9300 小封装低电压处理器 Core 2 Duo SL9600 Core 2 Duo SL9400 Core 2 Duo SL9380 Core 2 Duo SL9300 超低电压处理器 Core 2 Duo SU9600 Core 2 Duo SU9400 Core 2 Duo SU9300
Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Socket P Penryn Socket P Socket P Socket P Socket P Socket P Socket P Socket P
流体力学ppt课件-流体动力学

g
g
2g
水头
,
z
p
g
v2
2g
总水头, hw 水头损失
第二节 热力学第一定律——能量方程
水头线的绘制
总水头线
hw
对于理想流体,总水
1
v12 2g
2
v22 2g
头线是沿程不变的,
测压管水头线
p2
为一水平直线,对于
g
实际流体,总水头沿 程降低,但测压管水
p1 g
头线沿程有可能降低、
z2
不变或者升高。
z1
v2 A2 e2
u22 2
gz2
p2
v1A1 e1
u12 2
gz1
p1
微元流管即为流线,如果不 可压缩理想流体与外界无热 交换,热力学能为常数,则
u2 gz p 常数
2
这个方程是伯努利于1738年首先提出来的,命名为伯努利 方程。伯努利方程的物理意义是沿流线机械能守恒。
第二节 热力学第一定律——能量方程
皮托在1773年用一根弯成直角的玻璃管,测量了法国塞纳河 的流速。原理如图所示,在液体管道某截面装一个测压管和 一个两端开口弯成直角的玻璃管(皮托管),皮托管一端正 对来流,一端垂直向上,此时皮托管内液柱比测压管内液柱 高h,这是因为流体流到皮托管入口A点受到阻滞,速度降为 零,流体的动能变化为压强势能,形成驻点A,A处的压强称 为总压,与A位于同一流线且在A上游的B点未受测压管的影 响,其压强与A点测压管测得的压强相等,称为静压。
第四章 流体动力学
基本内容
• 雷诺输运公式 • 能量方程 • 动量方程 • 流体力学方程应用
第一节 雷诺输运方程
• 前面解决了流体运动的表示方法,但要在流 体上应用物理定律还有困难.
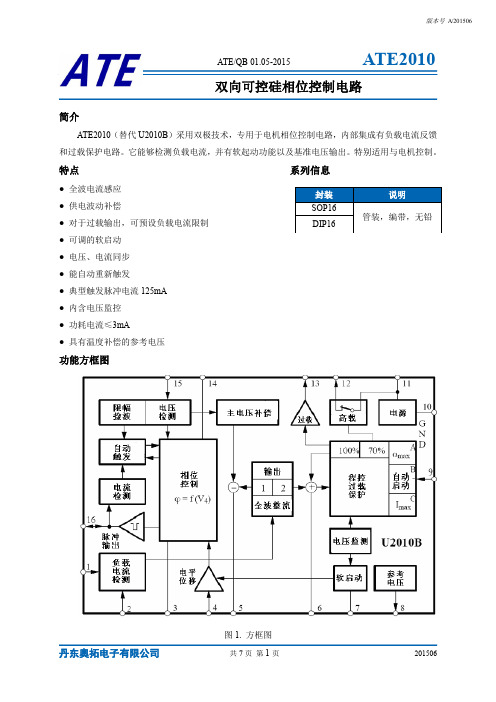
U2010B-ATE2010-说明书-中文
VT70 VT100 VT25 II RO
4 5.8 1.25
4.35 6.2 1.55
4.7 6.6 1.85 1
V V V μА kΩ
2
4
8
-V9 -I9 +I9
3.8 5 5
4.3 10 10
4.7 20 20
V μА
Vsat Vlim
0.5 7.0
0.75 7.4
1.0 7.8
V
Ilkg Vsat I13 Ilkg
电参数(续 2)
(VS=-13V,TA=25℃,参考点 Pin 10,除非另外说明) 参数 缩写 最小值 典型值 最大值 单位
负载电流监测
R1=R2=3kΩ, V15=0, V5=V6=V8 , 见图12 GI -IO -VRef ± V(R6) 0.28 0 300 0.32 3 0.37 6 400 250 μА/mV μА mV mV
参考电压源 (管脚8) 参考电压 温度系数 IL=10μА IL=2.5mА IS=2.5mА IS=10μА -VRef TCVRef 8.7 8.5 9.0 8.8 -0.004 +0.006 9.3 9.2 V %/K
丹东奥拓电子有限公司
共7页 第3页
201506
版本号 A/201506
ATE/QB 01.05-2015
-VI ±II – Iφmax
0-V8 500 0.5
V μA mA
0-V8
V
201506
丹东奥拓电子有限公司
版本号 A/201506
ATE/QB 01.05-2015
ATE2010
绝对最大值(续) (电压参考点 Pin 10,除非另外说明)
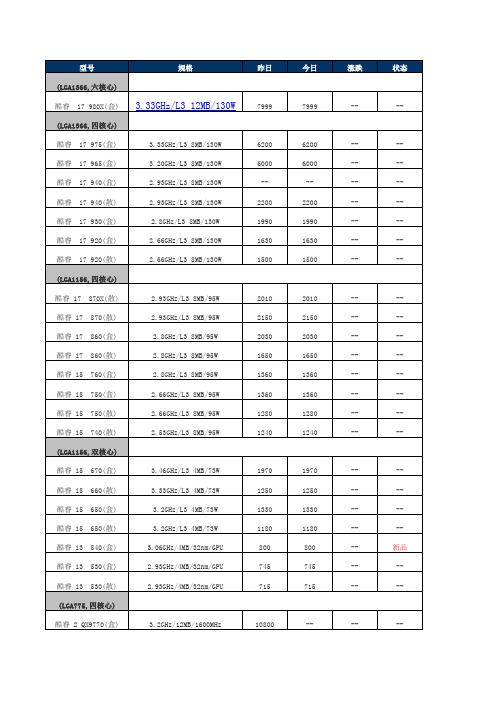
2010年11月Intel AMD桌面端处理器(CPU)报价
1970 1250 1330 1180 800 745 715
1970 1250 1330 1180 800 745 715
--------
----新品 ---
3.2GHz/12MB/1600MHz
10800
--
--
--
酷睿 2 QX9770(散) 酷睿 2 QX9650(盒) 酷睿 2 QX9650(散) 酷睿 2 QX6850(盒) 酷睿 2 QX6850(散) 酷睿 2 QX6700(盒) 酷睿 2 QX6700(散) 酷睿 2 Q9650(散) 酷睿 2 Q9600(散) 酷睿 2 Q9550(盒) 酷睿 2 Q9550(散) 酷睿 2 Q9500(散) 酷睿 2 Q9450(散) 酷睿 2 Q9400(盒) 酷睿 2 Q9400(散) 酷睿 2 Q9300(盒) 酷睿 2 Q9300(散) 酷睿 2 Q9100(ES散) 酷睿 2 Q8400(散) 酷睿 2 Q8300(盒) 酷睿 2 Q8300(散) 酷睿 2 Q8200(盒) 酷睿 2 Q8200(散) 酷睿 2 Q7700S(散) 酷睿 2 Q7600S(散) 酷睿 2 Q7500S(散) 酷睿 2 Q6700(盒) 酷睿 2 Q6700(散) 酷睿 2 Q6600(盒) 酷睿 2 Q6600(散)
6200 6000 -2200 1990 1630 1500
6200 6000 -2200 1990 1630 1500
--------
--------
2.93GHz/L3 8MB/95W 2.93GHz/L3 8MB/95W 2.8GHz/L3 8MB/95W 2.8GHz/L3 8MB/95W 2.8GHz/L3 8MB/95W 2.66GHz/L3 8MB/95W 2.66GHz/L3 8MB/95W 2.53GHz/L3 8MB/95W
MT9P017 MI5140

MT9P017: 1/4-Inch 5Mp CMOS Digital Image Sensor FeaturesAptina Confidential and Proprietary Preliminary ‡PDF: 7874015293/Source: 8150004667Aptina reserves the right to change products or specifications without notice.MT9P017_DS -Rev.B Pub. 6/10 EN ©2009 Aptina Imaging Corporation All rights reserved.1/4-Inch 5Mp CMOS Digital Image SensorMT9P017 Data Sheet For the latest data sheet, refer to Aptina’s Web site: Features •DigitalClarity ® CMOS imaging technology •Low dark current •Simple two-wire serial interface •Auto black level calibration •Support for external LED or xenon flash •High frame rate preview mode with arbitrary down-size scaling from maximum resolution •Programmable controls: gain, horizontal and vertical blanking, auto black level offset correction, frame size/rate, exposure, left–right and top–bottom image reversal, window size, and panning •Data interfaces: parallel or CCP2-compliant sub-low-voltage differential signaling (sub-LVDS) or single/dual lanes serial mobile industry processor interface (MIPI)•On-die phase-locked loop (PLL) oscillator •Bayer pattern down-size scaler •Superior low-light performance •Integrated position and color-based shading correction •6.4Kb one-time programmable (OTP) memory for storing shading correction coefficients of three light sources and module information •Extended Flash duration that is up to start of frame readout •On-chip VCM driver Applications•Cellular phones •Digital still cameras •PC cameras •PDAs General Description The Aptina MT9P017 is a 1/4-inch CMOS active-pixeldigital image sensor with a pixel array of2592H x 1944V (2608H x 1960V including border pix-els). It incorporates sophisticated on-chip camerafunctions such as windowing, mirroring, column androw skip modes, and snapshot mode. It is programma-ble through a simple two-wire serial interface and hasvery low power consumption.Ordering Information Table 2: Available Part Numbers Table 1: Key Performance Parameters Parameter Value Optical format 1/4-inch (4:3)Active imager size 3.63mm(H)x2.72(V):4.54mm diagonal Active pixels 2592H x 1944V Pixel size 1.4μm x 1.4μm Chief ray angle 25.0°Color filter array RGB Bayer pattern Shutter type Electronic rolling shutter (ERS)Input clock frequency 6–27MHz Maximum data rate Parallel 84 Mpps at 84MHz PIXCLK CCP2650Mbps MIPI 840 Mbps per lane Frame rate Full resolution (2592 x1944)15fps 1080P 15fps(100% FOV)30fps(68% FOV, windowing)720P 30fps(90% FOV, skip2)45fps(90% FOV, bin2)60fps(45% FOV, windowing)VGA (640x480) 60 fps(100% FOV, skip2, bin2)115 fps(100% FOV, skip4)ADC resolution 10-bit, on-die Responsivity TBDV/lux-sec (550nm)Dynamic range TBDdB SNR MAX TBDdB Supply voltage Digital I/O 1.7–1.9V (1.8V nominal) or 2.4–3.1V (2.8V nominal)Digital Core 1.15-1.25(1.2V nominal)Analog 2.6–3.1V (2.8V nominal)Digital 1.8V 1.7–1.9V (1.8V nominal)Power Consump-tion Full resolution Parallel: TBDmW at TBD°C (TYP)CCP2: TBDmW at TBD°C (TYP)MIPI: TBDmW at TBD°C (TYP)Standby TBD μW at TBD°C (TYP) Package Bare die Operating temperature –30°C to +70°C (at junction)Part Number Description MT9P017D00STCC48AC1Bare dieTable of ContentsFeatures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 General Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 Ordering Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 General Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 Functional Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 Pixel Array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 Operating Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9 Signal Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 Output Data Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Serial Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Parallel Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Output Data Timing (Parallel Pixel Data Interface) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Two-Wire Serial Register Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Start Condition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Stop Condition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Data Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Slave Address/Data Direction Byte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Message Byte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 Acknowledge Bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 No-Acknowledge Bit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 Typical Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 Single READ from Random Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 Single READ from Current Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 Sequential READ, Start from Random Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Sequential READ, Start from Current Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Single WRITE to Random Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Sequential WRITE, Start at Random Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21 Programming Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22 Output Size Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23 Effect of Scaler on Legal Range of Output Sizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24 Output Data Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25 Changing Registers while Streaming. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26 Programming Restrictions when Using Global Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26 Control of the Signal Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27 Serial Register Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27 Default Power-Up State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27 CCP2 Serial Pixel Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28 MIPI Serial Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28 Parallel Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29 Output Enable Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29 Configuration of the Pixel Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30 System States. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31 Power-On Reset Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32 Soft Reset Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32 Signal State During Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32 General Purpose Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Streaming/Standby Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Clocking. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35PLL Clocking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Influence of ccp_data_format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Influence of ccp2_signalling_mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Clock Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38 Shading Correction (SC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38 The Correction Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38 One-Time Programmable Memory (OTPM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Programming the OTPM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Reading the OTPM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40 Image Acquisition Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Window Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Pixel Border . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Readout Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Horizontal Mirror . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Vertical Flip. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Subsampling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Programming Restrictions when Subsampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44 Binning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46 Programming Restrictions when Binning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49 Scaler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50 Frame Rate Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51 Minimum Row Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52 Minimum Frame Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52 Integration Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52 Fine Integration Time Limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53 fine_correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53 Flash Timing Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Analog Gain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55 Using Per-color or Global Gain Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55 SMIA Gain Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55 Aptina Gain Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56 Gain Code Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56 Sensor Core Digital Data Path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57 Test Patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57 Effect of Data Path Processing on Test Patterns. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 Solid Color Test Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 100% Color Bars Test Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 Fade-to-gray Color Bars Test Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59 PN9 Link Integrity Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60 Walking 1s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Test Cursors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Digital Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63 Pedestal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63 Digital Data Path. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64 Embedded Data Format and Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64 Timing Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65 Power-Up Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65 Power-Down Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66 Hard Standby . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67 Soft Standby and Soft Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68 Soft Standby . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68 Soft Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68Internal VCM Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68 Spectral Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70 Electrical Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72 Two-Wire Serial Register Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72 EXTCLK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74 Parallel Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .75 Serial Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .76 Control Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77 Power-On Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78 Operating Voltages. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .79 Absolute Maximum Ratings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81 SMIA and MIPI Specification Reference. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81 Revision History. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82List of FiguresFigure 1:Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 Figure 2:Pixel Color Pattern Detail (Top Right Corner) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 Figure 3:Typical Configuration: Parallel Pixel Data Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10 Figure 4:Typical Configuration: Serial CCP2 Pixel Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 Figure 5:Typical Configuration: Serial Dual-Lane MIPI Pixel Data Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . .12 Figure 6:Spatial Illustration of Image Readout. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Figure 7:Pixel Data Timing Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16 Figure 8:Row Timing and FV/LV Signals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16 Figure 9:Single READ from Random Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 Figure 10:Single READ from Current Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 Figure 11:Sequential READ, Start from Random Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Figure 12:Sequential READ, Start from Current Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Figure 13:Single WRITE to Random Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Figure 14:Sequential WRITE, Start at Random Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21 Figure 15:Effect of Limiter on the Data Path. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24 Figure 16:Timing of Data Path. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25 Figure 17:MT9P017 System States. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31 Figure 18:MT9P017 Profile 1/2 Clocking Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35 Figure 19:Effect of horizontal_mirror on Readout Order. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Figure 20:Effect of vertical_flip on Readout Order. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Figure 21:Effect of x_odd_inc = 3 on Readout Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Figure 22:Effect of x_odd_inc = 7 on Readout Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43 Figure 23:Pixel Readout (No Subsampling). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43 Figure 24:Pixel Readout (x_odd_inc = 3, y_odd_inc = 3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43 Figure 25:Pixel Readout (x_odd_inc = 7, y_odd_inc = 7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44 Figure 26:Pixel Readout (x_odd_inc = 3, y_odd_inc = 1, x_bin = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47 Figure 27:Pixel Readout (x_odd_inc = 3, y_odd_inc = 3, xy_bin = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47 Figure 28:Pixel Readout (x_odd_inc = 7, y_odd_inc = 7, xy_bin = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48 Figure 29:Xenon Flash Enabled. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Figure 30:LED Flash Enabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Figure 31:100 Percent Color Bars Test Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59 Figure 32:Fade-to-Gray Color Bars Test Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60 Figure 33:Walking 1s 10-bit Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Figure 34:Walking 1s 8-bit Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Figure 35:Test Cursor Behavior with image_orientation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62 Figure 36:Data Path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64 Figure 37:Power-Up Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65 Figure 38:Power-Down Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66 Figure 39:Hard Standby. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67 Figure 40:Soft Standby and Soft Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68 Figure 41:VCM Driver Typical Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69 Figure 42:Quantum Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70 Figure 43:Chief Ray Angle (CRA) vs. Image Height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71 Figure 44:Two-Wire Serial Bus Timing Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72 Figure 45:Parallel Data Output Timing Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73 Figure 46:Internal Power-On Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78。
2010Intel主流芯片组 介绍

主流Intel主板芯片组介绍2008年经济形势不好,买电脑,也是要能省则省,但是根据每个人的使用需求不同,就需要选购不同的电脑。
这个时候,选择一款合适的主板就很重要,而主板上,主板芯片组就是一个很核心的部件,它影响着主板的性能,平台的定位和主板的性能一定要符合,才能够选择到极具性价比的电脑。
这就是今天要说的问题,向大家介绍目前市面主流的Intel主板芯片组,希望大家能够从规格上了解到各款主板的区别,在选购主板的时候做到心中有底。
G31:目前在Intel平台低端市场,G31芯片组主板可以说是独占鳌头,与它同为“3”系列整合主板的G33和G35芯片组主板都因各自的一些原因都非常少见,而nVIDIA出品的MCP73整合主板又因为不支持双通道等硬伤而性能短缺,现在市场上Intel低端平台,首选就是G31主板。
G31芯片组可以支持Intel LGA775封装的系列处理器,并支持双通道DDR2内存,并可以支持800MHz的内存频率。
在显示性能方面,G31芯片组整合了Intel GMA 3100显示核心,可以应付大多数的日常使用需求,并且支持Display Port、DVI等视频输出接口。
南桥方面,G31芯片组搭配的是ICH7南桥芯片,ICH7南桥提供了4个SA TA接口、6个USB接口以及4条PCI-E通道。
虽然ICH7南桥提供的接口方面不太丰富,不过考虑到G31芯片组的市场定位,这样的配置对于入门平台来说,还是足够使用的。
G41:Intel G41芯片组是一款新的入门级整合芯片组,于2008年第四季度发布。
在市场定位上,G41芯片组和G31相同,最终的目的,是让G41芯片组主板取代G31芯片组主板,成为Intel平台入门级平台的首选主板。
G41芯片组主板在性能上较G31芯片组主板更加强大,支持DX 10特效,并且在高清硬解方面,也支持部分格式的高清片源硬解。
不过,目前G41芯片组主板的价格还是要比G31芯片组主板贵一些,可以根据使用需要进行选购。
辽宁省北镇市第二高级中学、第三高级中学2024届高三上学期12月第四次月考物理试卷及答案

2023~2024学年度第一学期第四次月考高三物理试卷考试时间75分钟试卷满分100分※考生注意:请在答题卡各题目规定的区域内作答,答在本试卷上无效.一、本题共10小题,共46分。
在每小题给出的四个选项中,第1~7题只有一项符合题目要求,每小题4分;第8~10题有多项符合题目要求,每小题6分,全部选对的得6分,选对但不全的得3分,有选错的得0分。
1、曲水流觞是我国古代汉族民间的一种传统习俗。
每年农历三月上已日,人们坐在河渠两旁,让盛着酒水的木杯(觞)顺流而下,觞流经面前时,人们就取觞饮酒.如图所示的觞随着河水自西向东飘向下游时,突然吹来一阵南风,则之后觞可能的运动轨迹为()A.轨迹1B.轨迹2C.轨迹3D.轨迹42、利用质谱仪测量氢元素的同位素,如图所示,让氢元素的三种同位素氕、氘、氚的离子流从容器A下方的小孔无初速度飘入电势差为U的加速电场,加速后垂直进入磁感应强度为B的匀强磁场,最后打在照相底片D上,形成a、b、c三条质谱线,以下说法正确的是()A.a质谱线对应的是氘离子B.进入磁场时,氚离子的动量最大C.进入磁场时,氕离子的动能最大D.氕离子在磁场中运动的时间最长3、甲、乙两人进行“投壶”游戏。
甲离壶近,乙离壶远,两人分别从不同高度水平投出一小球,甲>乙,两球都成功投进壶内,两球质量相等,忽略空气阻力,下列说法正确的是()A.甲、乙两球下落时间不同,且甲<乙B.甲、乙球的水平速度相同C.甲球在下落过程中,相同时间内的动量增加量相同D.甲球在下落过程中,相同时间内动能的增加量相同4、如图所示,、为装在水平面上的两块间距可以调节的光滑竖直挡板,两板间叠放着、两个光滑圆柱体,现将两板间距调小些,这时与原来相比,下述结论中正确的是()A.板对圆柱体的弹力变小B.B圆柱体A对圆柱体的弹力变大C.水平面对圆柱体的弹力变大D.水平面对圆柱体的弹力变小5、2022年11月1日4时27分,空间站梦天实验舱在发射入轨后,成功对接于天和核心舱前向端口。
2010主流显卡一览

显卡型号(核心频率/显存频率)3Dmark Vantage GPU score nVidia Geforce 8600GT 256MB (540/1400)1500nVidia Geforce 9500GT 512MB (550/1600)1700ATI Radeon HD4650 256MB (600/1400)2000nVidia Geforce 8600GTS 512MB (675/2000)2200ATI Radeon HD4670 512MB (750/2000)3200ATI Radeon HD5550-D5 512MB (550/3600)3200nVidia Geforce 9600GSO 512MB (650/1800)3450nVidia Geforce 8800GS 384MB (550/1600)3800nVidia GT240 GD3-512MB (550/2000)3900nVidia Geforce 9600GSO 384MB (600/1800)4000ATI Radeon HD2900XT 512MB (740/2000)4100nVidia Geforce 9600GT (650/1800)4200ATI Radeon HD3850 512MB (670/1660)4250nVidia GT240 GD5-512MB (550/3400)4500ATI Radeon HD3870 512MB (775/2250)4500nVidia Geforce 8800GTS 640MB (500/1600)4700nVidia Geforce 9800GT (600/1800)5450nVidia Geforce 8800GT (600/1800)5450nVidia Geforce 8800GTS 512MB (650/1940)6050ATI Radeon HD4830 512MB (575/1800)6300nVidia Geforce 9800GTX 512MB (675/2200)6400nVidia GTS250 512MB(738/2200)6700nVidia Geforce 8800GTX 768MB (575/1800)6700nVidia Geforce 9800GTX+ 512MB (738/2200)6700nVidia Geforce 8800Ultra 768MB (612/2160)6900ATI Radeon HD4850 512MB (625/1986)7100ATI Radeon HD4860 512MB (700/3000)7300ATI Radeon HD5750 1GB (700/4600)7400ATI Radeon HD3870X2 1GB (825/1800)8300nVidia GTX260 896MB (576/2000)8600ATI Radeon HD4870 512MB (750/3600)8700nVidia Geforce 9800GX2 1GB (600/2000)8800ATI Radeon HD4870 1GB (750/3600)9000ATI Radeon HD5770 1GB (850/4800)9400nVidia GTX260+ 896MB (576/2000)9500ATI Radeon HD4890 1GB (700/3900)10500nVidia GTX275 896MB (633/2268)11100nVidia GTX460 768MB (675/3600)11500nVidia GTX280 1GB (602/2210)11500nVidia GTX465 1GB (608/3208)11800ATI Radeon HD5830 1GB (800/4000)12600nVidia GTX460 1GB (675/3600)13000nVidia GTX285 1GB (648/2480)13300ATI Radeon HD5850 1GB (725/4000)14500ATI Radeon HD4870X2 1GB (750/2600)14500nVidia GTX470 1280MB (608/3398)15000nVidia GTX295 1GB (576/2000)18000 ATI Radeon HD5870 1GB (850/4800)18200 nVidia GTX480 1.5GB (700/3696)18500 ATI Radeon HD5970 2GB (725/4000)21200核心代号(工艺)流处理器单元显存位宽(bit)显存带宽功耗G84(80nm)3212822.4GB/s43W G96(55nm)3212826.88GB/s50W RV730(55nm)32012822.4GB/s48W G84(80nm)32012832.0GB/s70W RV730(55nm)32012832.0GB/s60W RV830(40nm)32012857.6GB/s42W G94(55nm)4825657.6GB/s90W G92(65nm)9619238.4GB/s92W GT215(40nm)9612832.0GB/s65W G92(65nm)9619238.4GB/s105W R600(80nm)320512128GB/s180W G94(55nm)6425657.6GB/s96W RV670(55nm)32025653.12GB/s95W GT215(40nm)9612854.4GB/s65W RV670(55nm)32025672.0GB/s105W G80(90nm)9632064.0GB/s130W G92(65nm)11225657.6GB/s105W G92(65nm)11225657.6GB/s105W G92(65nm)12825662.08GB/s145W RV770LE(55nm)640/80025657.6GB/s110W G92(65nm)12825670.4GB/s156W G92(55nm)12825670.4GB/s141W G80(90nm)12838486.4GB/s190W G92(55nm)12825670.4GB/s141W G80(90nm)128384103.68GB/s230W RV770(55nm)80025663.55GB/s110W RV790LE(55nm)64025696GB/s150W Juniper(40nm)72012873.6GB/s86W RV670(55nm)320*225657.6GB/s170W GT200(65nm)192448112.0GB/s182W RV770(55nm)800256115.2GB/s157W G92(65nm)128*225664.0GB/s197W RV770(55nm)800256115.2GB/s157W Juniper(40nm)80012876.8GB/s108W GT200(55nm)216448112.0GB/s182W RV790(55nm)800256124.8GB/s190W GT200(55nm)240448127.0GB/s219W GF104(40nm)38419286.4GB/s150W GT200(65nm)240512141.4GB/s236W GF100(40nm)352256102.6GB/s200W Cypress(40nm)1120256128.0GG/s175W GF104(40nm)384256115.2GB/s160W GT200(55nm)240512158.7GB/s204W Cypress(40nm)1440256128.0GG/s170W RV770(55nm)800*225683.2GB/s286W GF100(40nm)448320135.9GB/s225WGT200(55nm)240*2512112.0GB/s289W Cypress(40nm)1600256153.6GB/s188W GF100(40nm)480384177.4GB/s250W Cypress(40nm)1600*2256128.0GG/s294W价格150~200RMB (二手)170~230RMB (二手)250RMB (二手)200~220RMB (二手)300RMB (二手)500RMB (全新)300RMB (二手)300RMB (二手)380RMB (二手)450RMB(全新)300RMB (二手)400RMB(二手)350RMB(二手)330RMB(二手)450RMB (二手)550RMB(全新)370RMB(二手)400RMB(二手)450RMB (二手)600RMB(全新)450RMB(二手)500RMB(二手)500RMB(二手)550RMB(二手)600RMB(二手)530RMB(二手)580RMB(二手)580RMB(二手)550RMB(二手)650RMB(二手)750RMB (全新)550RMB(二手)750RMB (二手)750RMB (二手)800RMB (二手)800RMB (二手)1000RMB (全新)850~900RMB (二手)950RMB (二手)1000RMB (二手)1399RMB (全新)xxx1899RMB (全新)1499RMB (全新)1499RMB (全新)1600RMB (二手)1700RMB (二手)2300RMB(全新)1300RMB (二手)2200RMB (二手)2600RMB (全新)1800RMB (二手)2500RMB (二手)3000RMB(全新)3000RMB (二手)3500RMB (全新)xxxx。
D07-9E型质量流量控制器和质量流量计使用手册说明书
D07 - 9E 型质量流量控制器D07- 9EM型质量流量计使 用 手 册版本2015. 12目录1. 使用须知................................... 1 6.2.1 开机预热.. (18)2. 用途和特点................................ 2 6.2.2 检查和调整零点. (18)3. 主要技术指标............................. 3 6.2.3 通气工作. (18)4. 结构和工作原理.......................... 5 6.2.4 关机. (18)4.1 结构....................................... 5 7. 注意事项.. (18)4.2 工作原理................................. 6 7.1 禁用流量介质 (18)5. 安装和接线 .............................8 7.2 使用腐蚀性气体问题 (18)5.1 外形及安装尺寸........................8 7.3 阀口密封问题 (19)5.2 气路接头形式...........................9 7.4 阀控操作注意 (19)5.3 连接电缆插头...........................11 7.5 安装位置问题 (19)5.4 与计算机信号的连接..................13 7.6 注意工作压差 (19)5.5 调零和外调零...........................15 7.7 标定和不同气体的换算 (19)6. 使用方法和操作步骤..................16 7.8 D07-9E, 9EM标准订单填写格式 (20)6.1 质量流量控制器的操作...............16 8. 故障判断和处理.. (23)6.1.1 开机操作...............................16 9. 保证、保修与服务.. (25)6.1.2 清洗功能...............................17 9.1 产品保证和保修.. (25)6.1.3 显示仪与计算机连接的操作.......17 9.2 保修对使用的要求.. (25)6.1.4 直接与计算机连接的操作..........17 9.3 服务.. (25)6.1.5 阀控功能...............................17 10. 附录 (26)6.1.6 关机操作...............................17 10.1 气体质量流量转换系数.. (26)6.2 质量流量计的操作....................18 10.2 转换系数使用说明.. (28)MASS FLOW CONTROLLER & MASS FLOW METER质量流量控制器和质量流量计使 用 手 册 1. 使用须知尊敬的用户,感谢您购买本公司生产的D07系列质量流量控制器/质量流量计产品。
东元tsta说明书

■警告及注意事項:警告y不可在送電中,實施配線工作。
y輸入電源切離後,伺服驅動器之狀態顯示CHARGE LED未熄滅前,請勿觸摸電路或更換零件。
y伺服驅動器的輸出端U、V、W,絕不可接到AC電源。
! 注意y當伺服驅動器安裝於控制盤內,若周溫過高時,請加裝散熱風扇。
y不可對伺服驅動器作耐壓測試。
y機械開始運轉前,確認是否可以隨時啟動緊急開關停機。
y機械開始運轉前,須配合機械來改變使用者參數設定值。
未調整到相符的正確設定值,可能會導致機械失去控制或發生故障。
y機械開始運轉前,務必確認參數Cn030:系列化機種設定,需選取正確的驅動器和馬達匹配組合!■安全注意事項:在安裝、運轉、保養、點檢前,請詳閱本說明書。
另外,唯有具備專業資格的人員才可進行裝配線工作。
說明書中安全注意事項區分為「警告」與「注意」兩項。
:表示可能的危險情況,如忽略會造成人員死亡或重大損傷。
警告! 注意:表示可能的危險情況,如未排除會造成人員較小或輕微的損傷及機器設備的損壞。
所以應詳閱本技術手冊再使用此伺服驅動器。
i首先,感謝您採用東元精電伺服驅動器TST A系列(以下簡稱TST A)和伺服馬達。
TST A可由數位面板操作器或透過P C人機程式來操作,提供多樣化的機能,使產品更能符合客戶各種不同的應用需求。
在使用TST A前,請先閱讀本技術手冊,本說明書主要內容包括:y y y y y 伺服系統的檢查、安裝及配線步驟。
數位面板操作器的操作步驟、狀態顯示、異常警報及處理對策說明。
伺服系統控制機能、試運轉及調整步驟。
伺服驅動器所有參數一覽說明。
標準機種的額定規格。
為了方便作日常的檢查、維護及瞭解異常發生之原因及處理對策,請妥善保管本說明書在安全的地點,以便隨時參閱。
註:請將此說明書交給最終之使用者,以使伺服驅動器發揮最大效用。
ii目錄第一章產品檢查及安裝1-1產品檢查............................................................................................................................1-1 1-1-1伺服驅動器機種確認.................................................................................................1-1 1-1-2伺服馬達機種確認.....................................................................................................1-2 1-1-3伺服驅動器與伺服馬達搭配對照表.........................................................................1-3 1-2伺服驅動器外觀及面板說明............................................................................................1-7 1-3伺服驅動器操作模式簡介................................................................................................1-8 1-4伺服驅動器安裝環境條件與方法....................................................................................1-9 1-4-1安裝環境條件.............................................................................................................1-9 1-4-2安裝方向及間隔.......................................................................................................1-10 1-5伺服馬達安裝環境條件與方法......................................................................................1-11 1-5-1安裝環境條件...........................................................................................................1-11 1-5-2安裝方式...................................................................................................................1-11 1-5-3其他注意事項...........................................................................................................1-12第二章配線準備2-1系統組成及配線................................................................................................................2-1 2-1-1伺服驅動器電源及週邊裝置配線圖.........................................................................2-1 2-1-2伺服驅動器配線說明.................................................................................................2-2 2-1-3電線規格.....................................................................................................................2-3 2-1-4馬達端出線.................................................................................................................2-4 2-1-5馬達及電源標準接線圖.............................................................................................2-6 2-1-6 TB端子說明..............................................................................................................2-7 2-1-7馬達附機械式剎車(BR A K E)接線說明....................................................................2-7 2-2I/O信號端子說明...............................................................................................................2-8 2-2-1 CN1控制信號端子說明............................................................................................2-9iii2-2-2 CN2編碼器信號端子說明......................................................................................2-21 2-3控制信號標準接線圖......................................................................................................2-23 2-3-1位置控制(Pe Mode)接線圖(L ine Dr ive r)................................................................2-23 2-3-2位置控制(Pe Mode)接線圖(Open Col l ec to r)..........................................................2-24 2-3-3位置控制(P i Mode)接線圖......................................................................................2-25 2-3-4速度控制(S Mode)接線圖.......................................................................................2-26 2-3-5轉矩控制(T Mode)接線圖.......................................................................................2-27第三章面板操作說明3-1驅動器面板操作說明........................................................................................................3-1 3-2面板顯示訊息說明............................................................................................................3-8 3-2-1狀態顯示功能說明.....................................................................................................3-8 3-2-2診斷功能說明.............................................................................................................3-9第四章試運轉操作說明4-1無負載伺服馬達試運轉....................................................................................................4-2 4-2無負載伺服馬達搭配上位控制器試運轉........................................................................4-5 4-3連接負載伺服馬達搭配上位控制器試運轉.....................................................................4-8第五章控制機能5-1控制模式選擇....................................................................................................................5-1 5-2轉矩模式............................................................................................................................5-2 5-2-1類比轉矩命令比例器.................................................................................................5-2 5-2-2類比轉矩命令偏移調整.............................................................................................5-3 5-2-3轉矩命令直線加減速.................................................................................................5-4 5-2-4轉矩輸出方向定義.....................................................................................................5-5 5-2-5內部轉矩限制設定.....................................................................................................5-6 5-2-6轉矩模式的速度限制.................................................................................................5-6 5-2-7其他轉矩控制機能.....................................................................................................5-8iv5-3速度模式............................................................................................................................5-9 5-3-1選擇速度命令...........................................................................................................5-10 5-3-2類比速度命令比例器...............................................................................................5-11 5-3-3類比速度命令偏移調整...........................................................................................5-11 5-3-4類比速度命令限制...................................................................................................5-12 5-3-5編碼器信號分周輸出...............................................................................................5-12 5-3-6速度命令平滑化.......................................................................................................5-14 5-3-7速度旋轉方向定義...................................................................................................5-17 5-3-8速度迴路增益...........................................................................................................5-18 5-3-9共振抑制濾波器(Notch F i l t e r).................................................................................5-19 5-3-10速度模式的轉矩限制............................................................................................5-21 5-3-11增益切換機能........................................................................................................5-22 5-3-12其他速度控制機能................................................................................................5-29 5-4位置模式..........................................................................................................................5-32 5-4-1外部脈波命令模式...................................................................................................5-33 5-4-2內部位置命令模式...................................................................................................5-35 5-4-3電子齒輪比...............................................................................................................5-40 5-4-4位置命令一次平滑加減速.......................................................................................5-45 5-4-5位置命令方向定義...................................................................................................5-46 5-4-6位置迴路增益調整...................................................................................................5-46 5-4-7脈波誤差量清除.......................................................................................................5-47 5-4-8原點復歸...................................................................................................................5-48 5-4-9其他位置控制機能...................................................................................................5-56 5-5伺服增益調整..................................................................................................................5-57 5-5-1自動增益調整...........................................................................................................5-61 5-5-2手動增益調整...........................................................................................................5-64 5-5-3改善響應特性...........................................................................................................5-65 5-6其他機能..........................................................................................................................5-66 5-6-1輸入/輸出接點機能規劃.........................................................................................5-66v5-6-2控制模式切換...........................................................................................................5-69 5-6-3接點輔助機能...........................................................................................................5-69 5-6-4剎車模式...................................................................................................................5-70 5-6-5機械剎車時序...........................................................................................................5-70 5-6-6 C W/C C W驅動禁止方式.........................................................................................5-72 5-6-7外部回生電阻的選用...............................................................................................5-72 5-6-8風扇運轉設定...........................................................................................................5-77 5-6-9類比監視...................................................................................................................5-77 5-6-10參數重置................................................................................................................5-78第六章參數機能6-1參數群組說明...................................................................................................................6-1 6-2參數機能表.......................................................................................................................6-2第七章通訊機能7-1通訊機能(RS-232 & RS-485).......................................................................................7-1 7-1-1通訊接線.....................................................................................................................7-1 7-1-2 RS-232通訊協定及格式...........................................................................................7-2 7-1-3 RS-485通訊協定及格式...........................................................................................7-5 7-2各參數相對應之通訊位址..............................................................................................7-16第八章異常警報排除8-1異常警報說明.....................................................................................................................8-1 8-2異常排除對策.....................................................................................................................8-3vi第一章產品檢查及安裝1-1 產品檢查本伺服產品在出廠前均做過完整之功能測試,為防止產品運送過程中之疏忽導致產品不正常,拆封後請詳細檢查下列事項:y 檢查伺服驅動器與伺服馬達型號是否與訂購的機型相同。
QN3109M6N_20161206
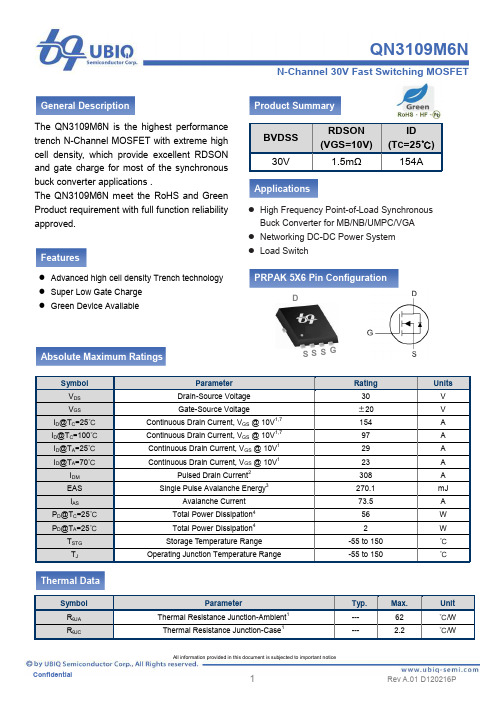
RDS(ON) Static Drain-Source On-Resistance2
VGS(th) △VGS(th)
Gate Threshold Voltage VGS(th) Temperature Coefficient
IDSS
Drain-Source Leakage Current
IGSS gfs Rg Qg Qg Qgs Qgd Td(on) Tr Td(off) Tf Ciss Coss Crss
Fig.4 Drain-Source On-State Resistance
Fig.5 Forward Characteristics of Reverse
Fig.6 Gate-Charge Characteristics
All information provided in this document is subjected to important notice
5
Rev A.01 D120216P
QN3109M6N N N-Channel 30V Fast Switching MOSFET
Important Notice
UBIQ and its subsidiaries reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. UBIQ products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgment. However, no responsibility is assumed by UBIQ or its subsidiaries for its use or application of any product or circuit; nor for any infringements of patents or other rights of third parties which may result from its use or application, including but not limited to any consequential or incidental damages. No UBIQ components are designed, intended or authorized for use in military, aerospace, automotive applications nor in systems for surgical implantation or life-sustaining. No license is granted by implication or otherwise under any patent or patent rights of UBIQ or its subsidiaries. This datasheet is preliminary datasheet for design reference. For final version datasheet, please contact UBIQ sales.
E2010电子单元说明书

MANUALE2010 ELECTRONIC UNIT FOR ZIROX- PROBESPower supply: 24 V DCTable of contents1General information 31.1How to use this manual 31.2Copyright 31.3Commonly used symbols 3 2Safety instructions 5 3Application and technical data 63.1Application 63.2Technical data 6 4Composition 84.1Front, keys 84.2Rear, connections 9 5Installation and initiation 115.1Installation 115.2Reference air supply for ZIROX® probes 115.3Waiting for operating state 11 6Parametrization 126.1Menu operation – an example 126.2Display 126.3Adjustable parameters 136.4Offset calibration 146.5Span gas calibration 146.6Reset calibration 146.7Error messages during calibration 146.8Menu navigation of calibration (diagram) 15 7Maintenance 167.1General information 167.2Calibration 167.3Error indication 167.4Storage 16 8Warranty 17 9Declaration of conformity 181 General information1.1 How to use this manualThis manual describes composition, mode of operation and use of the ELECTRONIC UNIT E2010 of the ZIROX GmbH.Proper operation of the E2010 can only be ensured if the contents of this manual are known. Therefore, all chapters of this manual must be read carefully prior to operating the E2010.The values on the device display in this manual are examples or preset parameters of the manufacturer. Process-specific parameters must be set by the user.Pages, charts and figures are numbered consecutively.1.2 CopyrightThis operation manual is copyright protected.It must not be partially or completely reproduced, copied, or distributed, without prior written permission of the manufacturer. The use for competitive advantages or the distribution to third parties are not authorized either. All rights reserved.1.3 Commonly used symbols Symbol for imminent danger:This symbol refers to imminent danger to persons’ life and health.In case of disregard fatal injuries may result.Symbol for indirect danger:This symbol indicates indirect danger.The degree of the damage depends on the circumstances and the actions of the persons involved.In case of disregard destruction or damage of the E2010, its single components or other material assets as well as minor injuries may result.dangerattentionSymbol for proper handling:This symbol appears where the manual refers to the adherence torules, instructions and proper operation.NoteIn case of disregard, damage or destruction of the E2010 or its singlecomponents may result.2 Safety instructionsThe following regulations for industrial safety provide basic informationabout potential danger during the operation of the E2010. Therefore, theymust be observed and strictly followed by the responsible staff.• A failure-free and functional operating of the E2010 can only beguaranteed with knowledge of this manual. Therefore, all chaptersof this manual must be read carefully before the installation andinitiation of the E2010.attention•The E2010 is to be used for the functional operation only (seechapter 3.1).•The E2010 may only be installed, operated, and maintained bytrained staff.•Special safety instructions for potential danger during certainworking processes are given in relevant text passages.3 Application and technical data3.1 ApplicationThe electronic unit E2010, developed for panel mounting, provides the power supply for ZIROX® sensors, evaluates signals and displays measuring results in the form of a standard signal (4-20 mA) for process control.The electronics realizes the following functions:•Power supply and control of sensor heating•Processing of the thermoelectric and cell voltage of the probe to the oxygen concentration•Output of the oxygen concentration as a standard signal•Calibration•Reference air supply by internal pump (option)3.2 Technical dataPower supply ........................................ 24 V DC +/- 10%Power consumption ............................. 2 W + sensor heating power Fuse ..................................................... 2.5 A resettingProtection degree ................................. IP 30 (Front IP52)Working temperature ............................ 0...40 °CStorage temperature ............................. 0...50°CSet temperature .................................... 700 °C (depends onconnected sensor)Display ................................................ Double-spaced LCD-display, 2 x 16 digitsInput signal ........................................... Sensor and thermoelectricvoltage (+/- 1500 mV, polarityadjustable), thermocouple typeB (400 – 1500 °C) or thermo-couple type K (0 – 1000°C)Output signal ....................................... 4...20 mA (0…10 V option)Dimensions W x H x D .......................... 96 mm x 96 mm x 125 mm Weight .................................................. Approx. 650 gKeypad ................................................ 2 keys (membrane keypad) Alarm indication ................................... Current output goes to 0 mA Interface (option) .................................. RS2324 Composition4.1 Front, keysThe display and the keys for parametrization are located on the front.Menu key: scroll or select the requested parameterENTER key: activate or enter adjusted parameter (save change)Fig. 1: Front view E2010 with keys and display4.2 Rear, connectionsAll connections and outputs are located on the rear.Fig. 2: Rear view E2010 with connections Terminal strip X1Terminal strip X2Sensor connections Power supply/output signalDigital output:………… RS 232-Interface (9600 Baud)Pin assignment RS 232The RS232 interface must be connected with a computer by SUB-D-cable (9pol., 1:1, uncrossed)!Transfer rate: max. 9600 Baud, adjustablePin Description cable 1 AINCOMbrown 2 Vz white 3 Vt blue 4 Heating+ black 5Heating-greyPin Description 1 +24V DC 2 GND 3 OUT + 4OUT -Stop bits 1 Parity no Data bits8HandshakewithoutProtocol of the serial interface (CR = carriage return)Set Feedback signal(example)Transferred measuringvalueParameterM2CR M2x.xxExxCRM22.06E+052.06*105 ppm O2Oxygen concentration inppmA1CR A1xxx.xCRA120.920.9 mV Cell voltage in mVA2CR A2xxx.xCRA2749.9749.9 °CMeasuring temperature in°CThe parameters are set by software.Additional PC-software for display and storage of the measuring values is available on request.Error messagesERROR0 Transfer error RS232 (or wrong command)ERROR1 Warm-up (Cell temperature too low, < 30 min)ERROR2 Cell temperature too low (< Set temp. – 10 °C, > 30 min) ERROR3 Thermocouple brokenERROR6 System errorElectronic unit E2010 Installation5 Installation and initiation5.1 InstallationThe clamps on the rear must be connected with the sensor clamps (s.chapter 4.2).The power supply is 24 V DC.5.2 Reference air supply for ZIROX® probesReference air input of the sensor and the reference air output of the E2010must be connected by a flexible hose (inner diameter 3 mm). The referenceair flow is preset by the manufacturer.After starting the system (E2010 with connected sensor) the reference airflow must be checked by an inserted flow meter (5 - 10 l/h resp. approx.100 - 200ml/min).5.3 Waiting for operating stateDepending on the connected sensor, the E2010 needs a certain period of Notetime until the operating state is reached (for further information seetechnical data of sensor). Because of thermal balancing effects, the sensorneeds approx. 60 minutes until the ultimate operating state after reachingthe operating temperature.The keys are locked before reaching the operating state!6 Parametrization6.1 Menu operation – an exampleAfter switch-on the warm-up starts. From 400 °C on the current temperature is displayed in the second line. After reaching the working temperature the oxygen concentration is displayed in the first line.By pressing several values can be displayed in the second line. (see chapter 6.2).With help of both keys an offset-calibration (…zero point calibration“) in clean air and a span gas calibration is possible. The complete menu is shown schematically in figure 3, p. 17.The sensor can be very hot for a while after switch-off and during operation. CAUTION – VERY HOT – DO NOT TOUCH!6.2 DisplayE2010 Start display, approx.3secVersion 2.4.6 Software versionE2010 Start display, approx.3sec THERMOCO. TYP B Thermocouple typeWARM-UP Warm-up of the ZIROX-SensorTemp: 450 °CO2: 20.64 Vol%Temp: 700 °CO2: 20.64 Vol%Vz: -2 mVO2: 20.64 Vol%SETTINGSO2: 20.64 Vol%CALIB.ZERO POINTO2: 20.64 Vol%CALIB. SPAN GAS6.3 Adjustable parametersThe following parameters are adjustable in the menu SETTINGS.OUTPUT VALUE Valid for display and analog output!Vol % O2 V ol ppm O2, mbar O2, atm O2, Vz [mV]OUTPUT VALUElog[10] linear (for Vz linear only)OUTPUT 4 - 20 mA Current outputZERO: 400 ppm Zero point 400 ppm corresponds to 4 mAOUTPUT 4 – 20 mASPAN: 206400 ppm Terminal value 206400 ppm corresponds to20 mARETURN ?NO YESSAVE VALUES ?NO YES6.4 Offset calibrationThe E2010 has a calibration function. Based on that function the zero point Notecalibration and, if requested, the span gas calibration can be conducted(see figure 3, p. 17). The zero point calibration must be conducted in cleanair.6.5 Span gas calibrationAfter calling the SPAN GAS concentration in the calibration menu (seefigure 3, p. 17), the setting options are activated by pressing the enter key.The flashing digit can be set by pressing the menu key. After changing allthe digits, this menu is deactivated by ENTER and left by the menu key.Now the calibration can be started.6.6 Reset calibrationIf in the main menu CALIB.ZERO POINT or CALIB. SPAN GAS isdisplayed and both keys are pressed for 3 seconds, RESET CAL.ZERO?and RESET CAL.SPAN respectively will be displayed.By pressing ENTER the calibration values will be reset to 0 resp. 1.6.7 Error messages during calibrationCALIBR. FAILEDOUT OF RANGE //limits: ±50mV resp.. ±50% of VzCALIBR. FAILED* TIMEOUT * //no steady measuring value in 20sec.6.8 Menu navigation of calibration (diagram)Fig. 3: Chart offset and span gas calibrationElectronic unit E2010 Maintenance7 Maintenance7.1 General informationZirox sensors and probes with thermocouple type B are calibration- andmaintenance-free. Only special products with thermocouple type K (e.g.oxygen probe SS51 for measurements in flue gases) must be calibratedperiodically.7.2 CalibrationDepending on the sensor type, a regular zero point calibration and (if sensorwith thermocouple type K) a span gas calibration is necessary (see chapter6). The corresponding frequency is outlined in the technical data of thesensor.7.3 Error indicationDuring operation the sensor is permanently monitored and typical errorsidentified.The following error messages can appear:WARM UPTEMP: 543 °CLOW PROBE TEMP.TEMP: 688 °C < T set (e.g. 700 °C) - 10°C+++ ERROR +++THERMOCOUPLE Thermocouple broken+++ ERROR +++COLD JUNCTION Only thermocouple Typ K7.4 StorageThe device must be stored in a dry and dust-free room at 0…50 °C. Pleaseuse the original packing!Electronic unit E2010 Warranty8 WarrantyZIROX Sensoren & Elektronik GmbH warrants that the productsmanufactured and sold are free from manufacturing and material defects atthe time of dispatch. In case of defects and faults within 12 months (probe)and 24 months (electronics assembly) respectively after dispatch, ZIROXwill clear faults at its own option by repair or replacement. The purchasermust give prompt written notice to ZIROX. The purchaser is not entitled toclaim other legal remedies based on this warranty.ZIROX does not warrant supplied products which are subject to normalwear and tear (e.g. reference gas pump).Corrosive gases and solid particles may cause damage and require repairor replacement due to normal wear and tear.The contact of the products with explosive gas compounds, halogens inhigh concentrations and sulphuric gases (e.g. SO2) is not permitted.The contact of the products with siliconic or phosphoric compounds is notpermitted either.A connection of ZIROX and non-ZIROX products voids any warrantyclaims.Warranty and warranty claims are only accepted if they are in accordancewith the "General Sales and Delivery Conditions" of the manufacturer.Warranty and liability claims for damage to persons and/or property arevoid if they are subject to the following:• Normal wear and tear• Improper use of the product• Disregard of the manual’s instructions• Improper installation, initiation, operation and maintenance ofthe product• Operation of the product without protective measures• Unauthorized functional and technical modification of theproduct• Dismantling of parts as well as installation of spare parts oradditional units which are not delivered or permitted by themanufacturer• Improper repairs or faulty operation•External impact•Acts of GodAttention: When installing the equipment, the customer must ensure thatall necessary supply lines are connected and the operating temperature ofthe probe is reached. Experience has shown that products installed but notin use may be damaged by the process or by external influence. ZIROX willnot accept any responsibility for such damage..Electronic unit E2010 Declaration of conformity9 Declaration of conformity。
2010版英特尔移动处理器型号及参数总览表

2010版英特尔移动处理器型号及参数总览表酷睿i系列处理器型号核心/线程主频睿频前端总线三级缓存制程功耗英特尔酷睿i7四核至尊移动处理器Core i7 Extreme 920XM 四核八线程 2.00GHz 3.20GHz 1333MHz 8MB 45 nm 55W英特尔酷睿i7四核移动处理器Core i7 820QM 四核八线程 1.73GHz 3.06GHz 1333MHz 8MB 45nm 45 WCore i7 720QM 四核八线程 1.60GHz 2.80GHz 1333MHz 6MB 45nm 45 W英特尔酷睿i7双核移动处理器Core i7 620M 双核四线程 2.66GHz 3.33GHz 1333MHz 4MB 32nm 35W 英特尔酷睿i7双核低压移动处理器Core i7 640LM 双核四线程 2.13GHz 2.93GHz 1066MHz 4MB 32nm 25 WCore i7 620LM 双核四线程 2.00GHz 2.80GHz 1066MHz 4MB 32nm 25 WCore i7 640UM 双核四线程 1.20GHz 2.26GHz 800MHz 4MB 32nm 18W Core i7 620UM 双核四线程 1.06GHz 2.13GHz 800MHz 4MB 32nm 18W 英特尔酷睿i5双核移动处理器Core i5 540M 双核四线程 2.53GHz 3.06GHz 1066MHz 3MB 32nm 35W Core i5 520M 双核四线程 2.40GHz 2.93GHz 1066MHz 3MB 32nm 35W Core i5 430M 双核四线程 2.26GHz 2.53GHz 1066MHz 3MB 32nm 35W 英特尔酷睿i5双核低压处理器Core i5 520UM 双核四线程 1.06GHz 1.86GHz 800MHz 3MB 32nm 18W英特尔酷睿i3双核移动处理器Core i3 350M 双核四线程 2.26GHz N/A 1066MHz 3MB 32nm 35WCore i3 330M 双核四线程 2.13GHz N/A 1066MHz 3MB 32nm 35W酷睿2系列处理器型号主频前端总线二级缓存制程功耗核心架构封装英特尔酷睿2四核至尊移动处理器Core 2 Extreme QX9300 2.53 GHz 1066MHz 12M 45nm 45W Penryn Socket P英特尔酷睿2四核移动处理器Core 2 Extreme Q9100 2.26 GHz 1066MHz 12M 45nm 45W Penryn Socket PCore 2 Extreme Q9000 2.00 GHz 1066MHz 6M 45nm 45W Penryn Socket P英特尔酷睿2双核至尊移动处理器Core 2 Extreme X9100 3.06 GHz 1066MHz 6M 45nm 44W Penryn SocketPCore 2 Extreme X9000 2.80 GHz 800 MHz 6M 45nm 44W Penryn Socket P 英特尔酷睿2双核移动处理器高性能处理器Core 2 Duo T9900 3.06 GHz 1066 MHz 6 MB 45nm 35W Penryn Socket P Core 2 Duo T9800 2.93 GHz 1066 MHz 6 MB 45nm 35W Penryn Socket P Core 2 Duo T9600 2.80 GHz 1066 MHz 6 MB 45nm 35W Penryn Socket P Core 2 Duo T9550 2.66 GHz 1066 MHz 6 MB 45nm 35W Penryn Socket PCore 2 Duo T9400 2.53 GHz 1066 MHz 6 MB 45nm 35W Penryn Socke t P标准电压处理器Core 2 Duo T9500 2.60 GHz 800 MHz 6 MB 45nm 35W Penryn Socket PCore 2 Duo T9300 2.50 GHz 800 MHz 6 MB 45nm 35W Penryn Socket PCore 2 Duo T8300 2.40 GHz 800 MHz 3 MB 45nm 35W Penryn Socket PCore 2 Duo T8100 2.10 GHz 800 MHz 3 MB 45nm 35W Penryn Socket PCore 2 Duo T6600 2.20 GHz 800 MHz 2 MB 45nm 35W Penryn Socket PCore 2 Duo T6570 2.10 GHz 800 MHz 2 MB 45nm 35W Penryn Socket PCore 2 Duo T6400 2.00 GHz 800 MHz 2 MB 45nm 35W Penryn Socket P低功耗高性能处理器Core 2 Duo P9700 2.80 GHz 1066 MHz 6 MB 45nm 28W Penryn Socke t PCore 2 Duo P9600 2.66 GHz 1066 MHz 6 MB 45nm 25W Penryn Socke t PCore 2 Duo P9500 2.53 GHz 1066 MHz 6 MB 45nm 25W Penryn Socke t PCore 2 Duo P8800 2.66 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P8700 2.53 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P8600 2.40 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P8400 2.26 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P7570 2.26 GHz 1067 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P7550 2.26 GHz 1068 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P7450 2.13 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P7370 2.00 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t PCore 2 Duo P7350 2.00 GHz 1066 MHz 3 MB 45nm 25W Penryn Socke t P小封装处理器Core 2 Duo SP9600 2.53 GHz 1066 MHz 6 MB 45nm 25W Penryn Soc ket PCore 2 Duo SP9400 2.40 GHz 1066 MHz 6 MB 45nm 25W Penryn Soc ket PCore 2 Duo SP9300 2.26 GHz 1066 MHz 6 MB 45nm 25W Penryn Soc ket P小封装低电压处理器Core 2 Duo SL9600 2.13 GHz 1066 MHz 6 MB 45nm 17W Penryn Soc ket PCore 2 Duo SL9400 1.86 GHz 1066 MHz 6 MB 45nm 17W Penryn Socket PCore 2 Duo SL9380 1.80 GHz 800 MHz 6 MB 45nm 17W Penryn Penryn Core 2 Duo SL9300 1.60 GHz 1066 MHz 6 MB 45nm 17W Penryn Socket P超低电压处理器Core 2 Duo SU9600 1.60 GHz 800 MHz 3 MB 45nm 10W Penryn Socket P Core 2 Duo SU9400 1.40 GHz 800 MHz 3 MB 45nm 10W Penryn Socket P Core 2 Duo SU9300 1.20 GHz 800 MHz 3 MB 45nm 10W Penryn Socket P Core 2 Duo SU7300 1.30 GHz 800 MHz 3 MB 45nm 10W Penryn Socket P 英特尔酷睿2单核移动处理器Core 2 Duo SU3500 1.40 GHz 800 MHz 3 MB 45nm 5.5W Penryn Socket P Core 2 Duo SU3300 1.20 GHz 800 MHz 3 MB 45nm 5.5W Penryn Socket P奔腾系列处理器型号主频前端总线二级缓存制程功耗核心架构封装英特尔奔腾双核移动处理器标准电压处理器T4400 2.20 GHz 800 MHz 1 MB 45nm 35W Penryn Socket PT4300 2.10 GHz 800 MHz 1 MB 45nm 35W Penryn Socket PT4200 2.00 GHz 800 MHz 1 MB 45nm 35W Penryn Socket P超低压处理器SU4100 1.30 GHz 800 MHz 2 MB 45nm 10W Penryn Socket P英特尔奔腾单核移动处理器超低压处理器SU2700 1.30 GHz 800 MHz 2 MB 45nm 5.5W Penryn Socket PIntel赛扬系列处理器型号主频前端总线二级缓存制程功耗核心架构封装英特尔赛扬双核移动处理器标准电压处理器T3100 1.90 GHz 800 MHz 1 MB 45nm 35W Penryn Socket PT3000 1.80 GHz 800 MHz 1 MB 45nm 35W Penryn Socket P超低压处理器SU2300 1.20 GHz 800 MHz 1 MB 45nm 10W Penryn Socket P英特尔赛扬单核移动处理器标准电压处理器900 2.20 GHz 800 MHz 1 MB 45nm 35W Penryn Socket P超低压处理器743 1.30 GHz 800 MHz 1 MB 45nm 10W Penryn Socket PIntel ATOM(凌动) 系列处理器型号主频前端总线二级缓存制程功耗Atom N450 1.66 GHz 667 MHz 512K 45nm 2WAtom Z540 1.86 GHz 533 MHz 512K 45nm 2.4WAtom Z530 1.60 GHz 533 MHz 512K 45nm 2WAtom Z520 1.33 GHz 533 MHz 512K 45nm 2WAtom N280 1.66 GHz 667 MHz 512K 45nm 2.5WAtom N270 1.60 GHz 533 MHz 512K 45nm 2.5W影响CPU性能的因素内核架构> 核心频率>二级缓存>前端总线比如同主频下的奔腾处理器性能不会高于酷睿2处理器酷睿2系列CPU的先进之处:酷睿2是Intel推出的第八代x86架构的处理器,酷睿2系列不仅注重主频的提升,在高速缓存、核心数量上也进行了优化,它的功耗也要比奔腾系列要低。
高分子物理--高聚物的粘性流动(粘流态) PPT
h
9
η是常数,与σs或γ无。 关,它仅与流体的分子结构和 T有关。
σs
γ。
牛顿流体的流动曲线
凡符合牛顿运动定律的流体称为牛顿流体。如甘油、 H2O等小分子液体的流动高分子稀溶液的流动。
h
10
三、非牛顿流体 凡不符合牛顿定律的流体就是非牛顿流体。
高分子熔体和高分子浓溶液属于非牛顿流体,恒 温流动时,它们的η随σs或γ的大。小改变。
分子链柔性好,链段短,Tf↓,如PE,PP
分子链刚硬,链段长,Tf↑,如PPO,PC,PSU 分子链极性强,△u↑,分子间作用力强,Tf↑, 如PSU,PC,PPO,PVC,PAN等
h
26
2、分子量的影响 M↑,链段数↑,摩擦力↑, Tf ↑
M↓,Tf ↓,当M↓到与链段尺寸相当时Tf与Tg重 合,这时不出现高弹态,玻璃化转变后直接進入 粘流态。聚合物的M具多分散性,实际上聚合物 往往没有明晰的Tf而是一个较宽温度范围的区域。
σs
假塑性流体
σy
绝大多数聚合物的熔 体都属于此类流体。
牛顿流体
0
γ。
为什么出现切力变稀 ?
h
13
3、膨胀性流体 σs~γ曲。 线通过原点向上弯曲,曲线的斜率(切粘 度)随γ↑而↑(切力增稠),加工困难
σs
膨胀性流体
高聚物的悬浮液, 胶乳或高聚物-填充
体系的流动常表现
牛顿流体
为膨胀性流动
0
γ。
h
14
h
27
3、外力和外力作用时间(t)
外力抵消分子链与外力方向相反的热运动,提 高链段沿外力方向运动的几率—“导向”。这种 作用力可以是重力,也可以是来自外加力,后者 在加工中更重要。
十进制计数器ep和et段
十进制计数器ep和et段
【原创实用版】
目录
1.十进制计数器概述
2.ep 段和 et 段的功能和作用
3.ep 段和 et 段的数值表示
4.ep 段和 et 段的应用实例
5.总结
正文
十进制计数器是一种电子元件,常用于计算机和数字电路中,用于计数和存储数字信号。
ep 段和 et 段是十进制计数器中的两个重要部分,它们分别代表了十进制计数器中的两个位数。
ep 段,也称为"低位",用于存储十进制计数器中的个位数。
它的值范围是 0 到 9,表示个位数的数量。
et 段,也称为"高位",用于存储十进制计数器中的十位数。
它的值范围也是 0 到 9,表示十位数的数量。
在实际应用中,ep 段和 et 段常常被用来进行计数。
例如,假设我们有一个十进制计数器,其 ep 段的值为 3,et 段的值为 2,那么这个计数器就表示了数字"32"。
当我们对计数器进行计数时,每次会将 ep 段的值加 1,当 ep 段的值达到 10 时,会将 et 段的值加 1,同时将 ep 段的值清零。
这样就可以实现十进制计数。
总的来说,十进制计数器 ep 段和 et 段是非常重要的电子元件,它们在计算机和数字电路中发挥着关键的作用。
第1页共1页。
ENE指标的设置

ENE指标的设置
1. TPM (Throughput per Minute)
TPM是一种衡量一定时间内系统吞吐量的指标,即在一些时间段内,
系统可以产出多少请求或操作。
TPM通常会根据不同的业务场景进行调整,我们可以根据不同的指标设定不同的TPM。
TPM可以帮助我们检测系统的性能,可以检测系统是否能够满足客户
的需求,以及查看系统是否能够处理大量数据。
2. Response Time(响应时间)
响应时间是指用户发送一个请求后,系统从发出请求到响应此请求所
需要的时间。
它是系统能力的一个重要衡量指标,需要根据不同的场景设
定不同的响应时间标准。
例如,如果我们的系统是用来处理实时交易,那么我们的响应时间标
准会比处理非实时交易的系统要严格得多,我们可能会设定一个比较严格
的响应时间标准。
3. CPU Utilization(CPU利用率)
CPU利用率是指系统中CPU的使用情况,这可以帮助我们检测系统的
负载情况。
CPU利用率通常会根据不同的场景进行调整,例如,如果系统
要处理大量的数据,那么我们可能会设定一个比较高的CPU利用率的标准。
4. Memory Utilization(内存利用率)
内存利用率是指系统中内存的使用情况,它可以帮助我们检测系统的
性能是否达标。
sgm44599
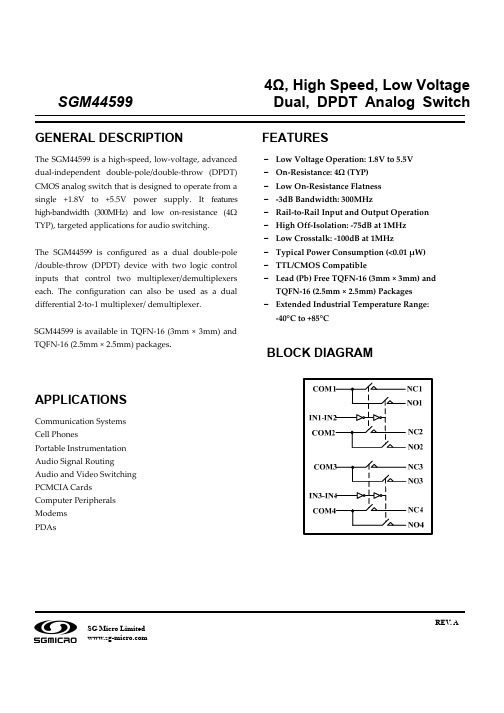
4Ω, High Speed, Low Voltage SGM44599 Dual, DPDT Analog SwitchREV. A SG Micro LimitedSGM445992ORDERING INFORMATIONMODELPIN- PACKAGESPECIFIED TEMPERATURERANGE ORDERING NUMBER PACKAGE MARKING PACKAGE OPTION TQFN-16 (2.5mm×2.5mm)-40°C to +85°C SGM44599YTQB16/TR 44599 Tape and Reel, 3000SGM44599TQFN-16 (3mm×3mm)-40°C to +85°CSGM44599YTQ16/TR44599Tape and Reel, 3000ABSOLUTE MAXIMUM RATINGSV + to GND......................................................................-0.3V to +6V Analog, Digital voltage range….................... - 0.3V to (V + + 0.3V) Continuous Current NO, NC, or COM ..........................±150mA Peak Current NO, NC, or COM ......................................±200mA Operating Temperature Range............................- 40°C to +85°C Junction Temperature..........................................................+150°C Storage Temperature........................................... - 65°C to +150°C Lead Temperature (soldering, 10s).......................................260°C ESD SusceptibilityHBM..........................................................................................2000V MM. (200V)Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.PIN CONFIGURATIONS (TOP VIEW)FUNCTION TABLEFunctionIN1-IN2NC1 and NC2 NO1 and NO20 ON OFF 1 OFF ONFunctionIN3-IN4NC3 and NC4 NO3 and NO40 ON OFF 1 OFF ONSGM445993PIN DESCRIPTIONPINNAME TQFN-16 (3mm×3mm)TQFN-16(2.5mm×2.5mm)FUNCTION V + 14 Power supply GND 6 GroundIN X 2,10Digital control pin to connect the COMterminal to the NO or NC terminalsCOM X 16,4, 8, 12 Common terminal NO X 15,3, 7, 11 Normally-open terminal NC X1, 5, 9, 13 Normally-closed terminalNote: NO X , NC X and COM X terminals may be an input or output.SGM445994ELECTRICAL CHARACTERISTICS(V + = +4.5V to +5.5V, GND = 0V, V IH = +1.6V, V IL = +0.5V, T A = -40°C to +85°C. Typical values are at V + = +5.0V, T A = +25°C, unless otherwise noted.)PARAMETER SYMBOL CONDITIONS TEMP MIN TPY MAX UNITS ANALOG SWITCH Analog Signal RangeV NO , V NC , V COM-40°C to +85°C 0 V +V +25°C 4 6.2Ω On-Resistance R ON V + = 4.5V, 0V ≤ V NO or V NC ≤ V +,I COM = -100mA, Test Circuit 1 -40°C to +85°C 7.2Ω +25°C 0.4 2.6Ω On-Resistance Match BetweenChannels∆R ON V + = 4.5V, 0V ≤ V NO or V NC ≤ V +, I COM = -100mA, Test Circuit 1 -40°C to +85°C 3.1Ω +25°C 2 3.1Ω On-Resistance Flatness R FLAT(ON) V + = 4.5V, 0V ≤ V NO or V NC ≤ V +, I COM = -100mA, Test Circuit 1-40°C to +85°C 3.6Ω Source OFF Leakage Current I NC(OFF), I NO(OFF)V + =5.5V, V NO or V NC = 3.3V/ 0.3V, V COM = 0.3V/ 3.3V-40°C to +85°C 1 µA Channel ON Leakage Current I NC(ON), I NO(ON), I COM(ON) V + = 5.5V, V COM = 0.3V/ 3.3V, V NO or V NC = 0.3V/ 3.3V, or floating-40°C to +85°C1µADIGITAL INPUTS Input High Voltage V INH -40°C to +85°C 1.6 V Input Low Voltage V INL-40°C to +85°C 0.5V Input Leakage CurrentI IN V + = 5.5V, V IN = 0V or 5.5V-40°C to +85°C1µADYNAMIC CHARACTERISTICS Turn-On Time t ON +25°C 31.5 ns Turn-Off Timet OFF V NC or V NO = 3.0V, R L = 300Ω,C L = 35pF, Test Circuit2 +25°C 30.0 ns Break-Before-Make Time Delay tD V NC or V NO = 3.0V, R L = 300Ω, C L = 35pF, Test Circuit4+25°C 11.5 ns Charge Injection Q V G = GND, R G = 0Ω, C L = 1.0nF, Q = C L x V OUT , Test Circuit3 +25°C 3.5pC 1MHz +25°C -75Off IsolationO ISOSignal = 0dBm, R L = 50Ω,Test Circuit510MHz +25°C -55 dB 1MHz +25°C -100Channel-to-Channel Crosstalk X TALK Signal = 0dBm,R L = 50Ω,Test Circuit610MHz +25°C -60dB -3dB Bandwidth BWSignal = 0dBm, R L = 50Ω, Test Circuit7+25°C300MHzChannel ON Capacitance C NC(ON), C NO(ON),C COM(ON)+25°C 43.2 pFPOWER REQUIREMENTS Power Supply Range V +-40°C to +85°C 1.8 5.5V Power Supply CurrentI +V + = 5.5V, V IN = 0V or V +-40°C to +85°C1µASpecifications subject to changes without notice.SGM445995ELECTRICAL CHARACTERISTICS(V + = +2.7V to +3.6V, V IH = +1.6V, V IL = +0.4V, T A = -40°C to +85°C. Typical values are at V + = +3.0V, T A = +25°C, unless otherwise noted.)PARAMETER SYMBOL CONDITIONS TEMP MIN TPY MAX UNITS ANALOG SWITCH Analog Signal RangeV NO , V NC , V COM-40°C to +85°C 0 V +V +25°C 1015Ω On-Resistance R ON V + = 2.7V, 0V ≤ V NO or V NC ≤ V +,I COM = -100mA, Test Circuit 1 -40°C to +85°C 18Ω +25°C 1 3 Ω On-Resistance Match BetweenChannels∆R ON V + = 2.7V, 0V ≤ V NO or V NC ≤ V +, I COM = -100mA, Test Circuit 1 -40°C to +85°C 4 Ω +25°C 6 9 ΩOn-Resistance Flatness R FLAT(ON) V + = 2.7V, 0V ≤ V NO or V NC ≤ V +, I COM = -100mA, Test Circuit 1-40°C to +85°C 12Ω Source OFF Leakage Current I NC(OFF), I NO(OFF)V + = 3.6V, V NO or V NC = 3.3V / 0.3V,V COM = 0.3V/ 3.3V-40°C to +85°C 1 µA Channel ON Leakage Current I NC(ON), I NO(ON), I COM(ON) V + = 3.6V, V COM = 0.3V/ 3.3V, V NO or V NC = 0.3V/ 3.3V, or floating-40°C to +85°C1µADIGITAL INPUTS Input High Voltage V INH -40°C to +85°C 1.5 V Input Low Voltage V INL-40°C to +85°C 0.4V Input Leakage CurrentI IN V + = 2.7V, V IN = 0V or 2.7V-40°C to +85°C1µADYNAMIC CHARACTERISTICS Turn-On Time t ON +25°C 38.0 ns Turn-Off Timet OFF V NC or V NO = 1.5V, R L = 300Ω,C L = 35pF, Test Circuit2 +25°C 44.0 ns Break-Before-Make Time Delay tD V NC or V NO = 1.5V, R L = 300Ω, C L = 35pF, Test Circuit4+25°C 5.8 ns Charge Injection Q V G = GND, R G = 0Ω, C L = 1.0nF, Q = C L x V OUT, Test Circuit3 +25°C 2.6pC1MH +25°C -75 dB Off IsolationO ISOSignal = 0dBm, R L = 50Ω,Test Circuit510MHz +25°C -55 dB 1MHz +25°C -100 dB Channel-to-Channel Crosstalk X TALK Signal = 0dBm, R L = 50Ω,Test Circuit610MHz +25°C -60dB -3dB Bandwidth BW Signal = 0dBm, R L = 50Ω, Test Circuit7+25°C300MHzChannel ON CapacitanceC NC(ON), C NO(ON),C COM(ON)+25°C 43.2 pFSpecifications subject to changes without notice.SGM445996TYPICAL PERFORMANCE CHARACTERISTICSSGM445997TEST CIRCUITS100mAV NO or V NCTest Circuit 1. On ResistanceTest Circuit 2. Switching Times (t ON , t OFF )Test Circuit 3. Charge InjectionSGM445998TEST CIRCUITS (Cont.)Test Circuit 4. Break-Before-Make Time Delay (t D )Test Circuit 5. Off IsolationV OUTNO or NCV GND0.1µFV Source Signal R L 505pFChannel To Channel Crosstalk = -20V NO or V NCV OUTN.C.Test Circuit 6. Channel-to-Channel CrosstalkSGM445999TEST CIRCUITS (Cont.)Test Circuit 7. -3dB BandwidthSGM4459910PACKAGE OUTLINE DIMENSIONSTQFN-16 (3mm × 3mm)Note: All linear dimensions are in millimeters.SGM4459911PACKAGE OUTLINE DIMENSIONSTQFN-16 (2.5mm × 2.5mm)Note: All linear dimensions are in millimeters.SGM44599 12REVISION HISTORYLocation Page10/2007—Preliminary Datasheet01/2008— Data Sheet changed from preliminary to REV. AAdds TQFN-16 (2.5mm × 2.5mm) Package ………………………………………………………………………………………………. 1,2,10SGMICROSGMICRO is dedicated to provide high quality and high performance analog IC products to customers. All SGMICRO products meet the highest industry standards with strict and comprehensive test and quality control systems to achieve world-class consistency and reliability.For information regarding SGMICRO Corporation and its products, see 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鄂尔多斯:硅铁价格上涨,2010年净利或增97%,预计2010年每股收益
0.75元
内蒙古鄂尔多斯羊绒制品股份有限公司(600295),自1979年创立以来,经过30年的持续高盈利滚动式发展和近10年来的大规模产业扩张,形成目前“三大事业板块和六大主导产业”格局。
公司拥有总资产逾200亿,主业为羊绒、硅铁和煤炭。
公司羊绒制品国际市场占有率在30%左右,国内市场占有率超过40%,为全球最大的羊绒制品生产企业。
公司于1995年9月在上交所发行B股上市,2001年3月在上交所首次发行A股。
2009年,鄂尔多斯实现营业收入81.17亿元,同比减少14.73%,净利润3.93亿元,同比减少5.40%,每股收益0.38元。
其历年营业收入、净利润及我们对其2010年的业绩预测,如下列二图所示:
羊绒业,是原料稀缺性限制很大的行业。
公司依托内蒙独特的羊绒资源,在原料方面有突出的资源优势。
但是,由于羊绒业务受制于羊绒产量限制,难有快速成长空间。
2006年之前,公司营业收入增长不快。
随着公司向其他横向行业的扩张,其规模不断增长,2006年以后,主营业务收入呈快速增长之势,2006年—2009年,年复合增长率达到19.0%。
2007 年之前,由于主营收入及利润主要来自羊绒业务,而盈利又受羊绒价格浮动影响较大,因此公司净利润波动也较大。
2008年,净利润再次下降,是由于投资收益降低造成的。
2009年,受硅铁价格下降影响,公司净利润连续第二年下降。
数据显示,鄂尔多斯的毛利率历年来多高于行业平均水平,主要是由于公司作为行业龙头所具有的规模优势和资源优势。
2009年,受硅铁价格导致的毛利率下跌的拖累,公司综合毛利率为26.1%,比上年下降7.3个百分点,低于行业水平5个百分点。
如下图所示:
费用控制方面,公司管理费用率多年来基本与行业水平相当,2003—2006年,公司管理费用率高于行业水平,然而整体呈先升后降趋势,主要是由于公司扩张所需整合费用增加所致。
随着整合的完成,近年来公司管理费用率已下降到行业水平之下,规模优势显现,边际管理成本下降。
2009年,其管理费用率为5.8%。
营业费用率方面,数据显示公司营业费用率近年来整体呈下降趋势,2009年为5.9%,已降到行业平均水平之下,说明公司品牌价值和规模经济效益开始显现。
财务费用率,则长期与行业平均看齐,近年来保持在5%左右,2009年为6.1%。
公司主营业务突出,投资回报方面,历年投资收益占利润总额比重总体偏低,除2007年外从未超过10%,2009年期比比重位0.83%。
从2004年起,公司开始加大对外投资力度,对外投资占所有者权益比重,最高时曾接近40%,近4年来有有较大幅度的降低,2009年已降到12%左右。
然而,客观的投资规模,从未给鄂尔多斯带来过与其相当的回报,在大多数年
份,投资收益占利润总额的比例,都在零上下变化。
由于投资收益不突出,毛利率和费用率总体与行业平均水平持平,公司销售利润率也仅得到行业平均水平,并呈整体逐年下降趋势,2009年为9.13%。
其历年销售利润率变化情况,如下图所示:
从资本结构看,公司资产负债率长期起伏不定,但总体呈上升趋势,2009年为66.66%,尚属健康状态,如下图所示:
投资回报率方面,公司净资产收益率在1997年以后鲜有超过15%者,但整体与行业平均水平一致,2009年为9.9%,如下图所示:
流动性方面,公司流动比率一直较高,近年来由于资金运用规模不断扩大而所下降,2009年已下降到100%以下的高风险水平,仅为88.8%,如下图所示:
2010年,因硅铁价格上涨导致公司硅铁业务升温。
同时,由于煤炭扩产明显,规模增加,导致煤炭业务毛利率提升。
再者,公司羊绒业务也进入上升周期,而且这一周期将持续到今后几年。
2010年一季度,公司实现营业收入22.08亿元,同比增长98.9%,净利润1.31亿元,同比增长301%,每股收益0.49元。
分析显示,一季度取得好业绩主要是由于如下两个原因:
(1)经济回暖、出口增加和内需增加使羊绒业务进入新一轮上升周期,公司品
牌的提升和渠道的重建,使得毛利率也稳步提升;
(2)公司另一主导产品——硅铁价格大幅涨价,毛利率提升。
我们使用英策咨询的上市公司财务模型,对鄂尔多斯2010年全年业绩进行了预测,预计其2010年营业收入为114.11亿元,同比增长40.6%,净利润7.78亿元,同比增长97.8%。
按公司目前总发行股数10.32亿股计算,预计其2010年每股收益为0.75元(2009年为0.38元)。
英策咨询研究部。