滑动平均系统的去噪处理
滑动平均值滤波算法
滑动平均值滤波算法(Moving Average Filter),也称为移动平均滤波,是一种用于信号处理和数据处理的常见滤波技术。
它的基本原理是通过计算一系列连续窗口内数据点的平均值来减少噪音并平滑数据。
滑动平均值滤波可以用于时间序列数据的平滑、去噪和趋势分析。
下面是滑动平均值滤波的基本步骤和用法:1.选择窗口大小:首先,你需要确定滑动窗口的大小。
窗口大小决定了在滤波过程中考虑的数据点数量。
较大的窗口可以提供更平滑的输出,但可能会引入较大的延迟,较小的窗口响应更快,但可能无法滤除高频噪音。
2.初始化窗口:为了开始滤波,你需要初始化一个长度为窗口大小的缓冲区,用来存储窗口内的数据点。
3.数据处理:从输入数据流中逐步获取数据点,并将它们添加到窗口缓冲区中。
当缓冲区已满时,删除最旧的数据点,以便腾出空间。
4.计算平均值:在每次添加新数据点后,计算窗口内所有数据点的平均值。
平均值可以通过将窗口内的数据点相加并除以窗口大小来得到。
5.输出平均值:使用计算出的平均值作为输出,代表输入数据的滤波后数值。
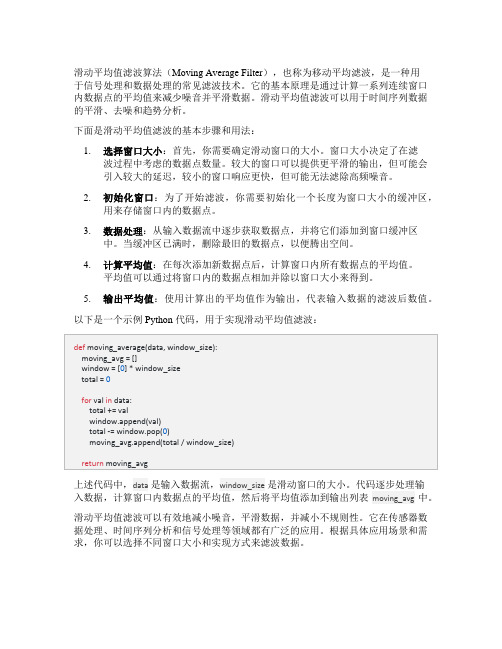
以下是一个示例 Python 代码,用于实现滑动平均值滤波:上述代码中,data是输入数据流,window_size是滑动窗口的大小。
代码逐步处理输入数据,计算窗口内数据点的平均值,然后将平均值添加到输出列表moving_avg中。
滑动平均值滤波可以有效地减小噪音,平滑数据,并减小不规则性。
它在传感器数据处理、时间序列分析和信号处理等领域都有广泛的应用。
根据具体应用场景和需求,你可以选择不同窗口大小和实现方式来滤波数据。
数据噪声处理十三种方法
数据噪声处理十三种方法数据噪声是指数据中存在的随机干扰或异常值,对数据的正确分析和处理产生不利影响。
为了准确分析数据,提高数据质量和减少噪声的影响,可以采用以下十三种方法对数据噪声进行处理。
1.平滑法:平滑法通过对数据进行平均、滑动平均或加权平均等方式,去除噪声的突变部分,保留数据的趋势信息。
2.滤波法:滤波法利用滤波器对数据进行滤波处理,去除噪声的高频成分。
常见的滤波方法有低通滤波、高通滤波和中值滤波等。
3.插值法:插值法通过在数据点之间插入新的数据点,填补噪声造成的缺失值,使得数据更加连续平滑。
4.异常值检测:异常值检测方法用于识别和排除数据中的异常值,可以通过统计分析、离群值检测和异常点识别等方法实现。
5.噪声消除算法:噪声消除算法通过对数据进行计算和分析,识别并去除噪声的影响,例如小波去噪算法和小波包去噪算法等。
6.阈值处理:阈值处理方法将数据中小于或大于一定阈值的值置为0或其他指定值,以剔除噪声的影响。
7.自适应滤波:自适应滤波方法根据数据的统计特性自动调整滤波器参数,以适应不同的数据噪声情况。
8.分段拟合:分段拟合方法将数据分成若干段,并对每一段进行拟合,以减小噪声的影响。
9.聚类分析:聚类分析方法将数据根据相似性进行分组,识别并剔除与其他数据点不同的噪声数据。
10.平均融合:平均融合方法将多个数据源的数据进行加权平均,以减小噪声的影响。
11.特征选择:特征选择方法通过选择对目标变量有显著影响的特征,剔除与目标变量无关的噪声特征。
12.数据变换:数据变换方法通过对数据进行幂次、对数、指数等变换,使得数据分布更加接近正态分布,减小噪声的影响。
13.交叉验证:交叉验证方法通过将数据集划分为训练集和测试集,在训练集上建立模型,并在测试集上评估模型的表现,以判断模型对噪声的鲁棒性。
以上是十三种常见的数据噪声处理方法,根据具体情况可以选择合适的方法或者结合多种方法来处理数据中的噪声,提高数据的质量和可靠性。
数据清洗与整理中的数据去噪与噪声抑制方法探讨(七)
数据清洗与整理中的数据去噪与噪声抑制方法探讨引言在当今信息时代,大数据已成为各个领域的重要组成部分。
然而,数据分析的质量直接依赖于数据清洗与整理过程的准确性和完整性。
其中,数据去噪和噪声抑制是数据清洗与整理中的关键步骤。
本文旨在探讨几种常见的数据去噪和噪声抑制方法,并对其优缺点进行比较。
数据去噪方法1.统计方法统计方法是最常见也是最直观的一种数据去噪方法。
在数据分析过程中,我们可以通过计算均值、中位数或众数来消除噪声数据的影响。
这种方法适用于某一特定区域内数据噪声较小的情况,但对于存在大量离群值的数据集来说效果较差。
2.滑动窗口平均滑动窗口平均是一种基于移动平均的数据去噪方法。
该方法将数据分成固定长度的窗口,计算每个窗口内数据的平均值,并将其作为该窗口的输出值。
这样可以有效地平滑曲线,在一定程度上去除噪声。
然而,滑动窗口平均会导致数据的延时,因此在实时应用中需谨慎使用。
3.小波去噪小波去噪是一种基于小波变换的数据去噪方法。
在该方法中,数据被分为高频和低频成分。
通常,噪声主要体现在高频成分上,而信号主要体现在低频成分上。
通过去除高频噪声成分,可以实现数据的去噪效果。
小波去噪方法被证明在信号处理领域有很好的效果,然而其计算复杂度较高,通过调整小波系数和阈值来达到最佳去噪效果也是一项挑战。
噪声抑制方法1.滤波器滤波器是一种常见的噪声抑制方法。
它通过选择合适的滤波器类型和参数来消除噪声信号。
常见的滤波器包括低通滤波器、高通滤波器和带通滤波器等。
通过滤波器可以保留所需信号的频率成分,而抑制其他频率的噪声信号。
然而,滤波器的设计需要根据具体的应用场景来进行,因此在实际应用中需要进行一定的参数调整和优化。
2.小波分析除了用于去噪,小波分析也可以用于噪声抑制。
小波分析通过将信号转换到时频域,可以将频率信息和时域信息同时考虑。
通过选择合适的小波基函数和阈值处理方法,可以抑制噪声信号并保留原始信号的有用信息。
然而,小波分析的计算复杂度较高,尤其在实时应用中需要考虑时延问题。
DFS

10
x[k]
5
0
-5
0
20
40
60
80
100
120
140
160
180
200
Time index k
14
12
s[k]
y[k]
10
8
6
4
2
0
0
20
40
60
80
100
120
140
160
180
200
Time index k
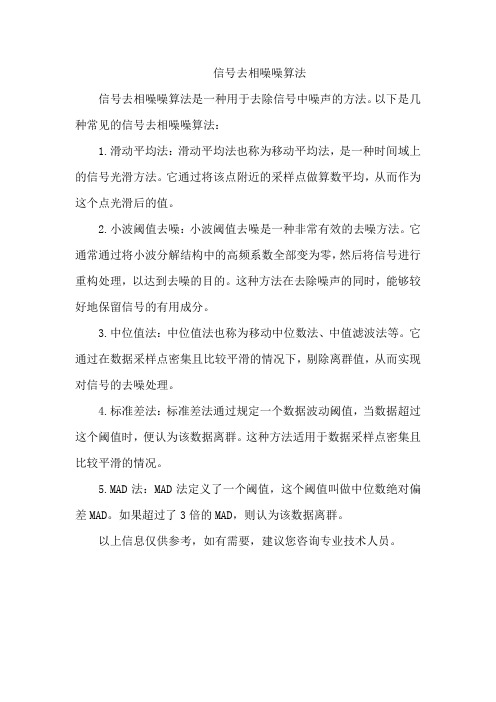
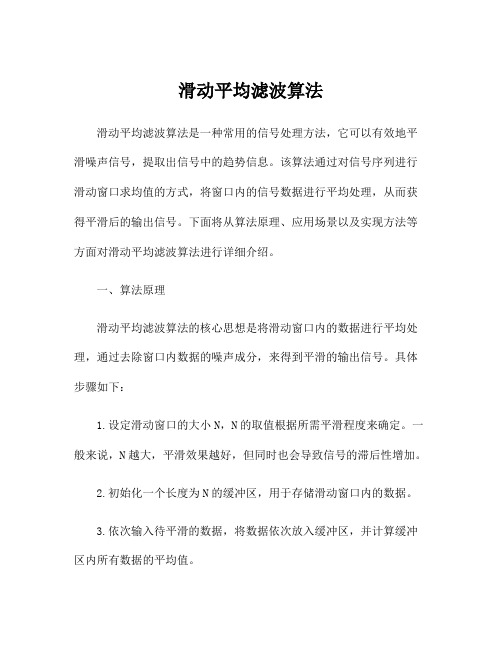
利用 M点的滑动平均系统去噪
% Signal Smoothing by Moving Average Filter N = 201; n = 1.0*rand(1,N)-0.5; k=0:N-1; s=2*k.*(0.9.^k)+2.0*cos(0.02*pi*k)+5.0; x=s+n; subplot(2,1,1); plot(k,n,'k-', k,s,'b--', k,x,'m-'); xlabel('Time index k'); legend('n[k]','s[k]', ' x[k]'); M =5; b = ones(M,1)/M; a =[1]; y = filter(b,a,x); subplot(2,1,2); plot(k,s,'b-', k,y,'r-'); xlabel('Time index k'); legend('s[k]','y[k]');
一般地,一个周期为N周期序列可表示为
信号去相噪噪算法
信号去相噪噪算法
信号去相噪噪算法是一种用于去除信号中噪声的方法。
以下是几种常见的信号去相噪噪算法:
1.滑动平均法:滑动平均法也称为移动平均法,是一种时间域上的信号光滑方法。
它通过将该点附近的采样点做算数平均,从而作为这个点光滑后的值。
2.小波阈值去噪:小波阈值去噪是一种非常有效的去噪方法。
它通常通过将小波分解结构中的高频系数全部变为零,然后将信号进行重构处理,以达到去噪的目的。
这种方法在去除噪声的同时,能够较好地保留信号的有用成分。
3.中位值法:中位值法也称为移动中位数法、中值滤波法等。
它通过在数据采样点密集且比较平滑的情况下,剔除离群值,从而实现对信号的去噪处理。
4.标准差法:标准差法通过规定一个数据波动阈值,当数据超过这个阈值时,便认为该数据离群。
这种方法适用于数据采样点密集且比较平滑的情况。
5.MAD法:MAD法定义了一个阈值,这个阈值叫做中位数绝对偏差MAD。
如果超过了3倍的MAD,则认为该数据离群。
以上信息仅供参考,如有需要,建议您咨询专业技术人员。
基于高密度直流电法的五点三次平滑法与五点直线滑动平均法去噪方法的对比研究
Open Journal of Natural Science 自然科学, 2023, 11(5), 854-863 Published Online September 2023 in Hans. https:///journal/ojns https:///10.12677/ojns.2023.115102基于高密度直流电法的五点三次平滑法与五点直线滑动平均法去噪方法的对比研究路天昊1,21中国地质调查局廊坊自然资源综合调查中心,河北 廊坊 2中国地质大学(北京)地球物理与信息技术学院,北京收稿日期:2023年7月30日;录用日期:2023年9月6日;发布日期:2023年9月14日摘 要高密度电阻率法作为电法勘探的一种方法,其布设方式简单,仪器易于操作,成本低,解释简便等优点,在水文地质勘探以及工程地质勘探等方面有着广泛的应用,获得了显著的效果。
然而在高密度电阻率法野外采集数据的过程中,由于仪器设备、人为操作以及工区环境噪音等众多因素,造成获得的数据中含有各种噪音,使得通过反演获得的电性结构模型与实际的地下结构有着很大的偏差。
因此本次研究以在内蒙古自治区呼伦贝尔市扎兰屯市大河湾镇附近采集的高密度电阻率数据为例,由于浅部含有的随机噪音较多,因此通过MATLAB 编写五点三次平滑法和五点直线滑动平均法的程序,并利用程序对采集到的原始数据进行去噪,然后采用RES2DINV 软件对两种去噪方法获得的数据以及原始数据分别进行反演,并与原始数据反演结果进行对比。
结果表明经过五点三次平滑法去噪获得的数据能够有效地消除干扰,使获得的电性结构模型在水平方向上的分层更加清晰连贯,并且总体上不会改变电阻率的分布特征,有助于自然资源地表基质垂向结构特征的研究。
关键词高密度电阻率法,随机噪音,五点三次平滑法,五点直线滑动平均法Comparative Study on Denoising Methods of 5.3 Smoothing Method and Linear Moving Average Method Based on High Density Current MethodTianhao Lu 1,21Langfang Comprehensive Investigation Center of Natural Resources, China Geological Survey, Langfang Hebei 2School of Geophysics and Information Technology, China University of Geosciences (Beijing), Beijing路天昊Received: Jul. 30th , 2023; accepted: Sep. 6th , 2023; published: Sep. 14th , 2023Abstract As a method of electrical prospecting, the high-density resistivity method has the advantages of simple layout, easy operation of instruments, low cost, and easy interpretation. It has been widely used in hydrogeological prospecting and engineering geological prospecting, significant effect. However, in the process of collecting data in the field by the high-density resistivity method, due to many factors such as equipment, human operation, and environmental noise in the work area, the obtained data contains various noises, which makes the electrical structure model obtained by inversion different from the actual one. The underground structure has a large deviation. There-fore, this study takes the high-density resistivity data collected near Dahewan Town, Zhalantun City, Hulunbeier City, Inner Mongolia Autonomous Region as an example. Since the shallow part contains more random noise, the five-point cubic smoothing method and the five-point smoothing method are written by MATLAB The program of the point-line moving average method, and use the program to denoise the collected original data, and then use the RES2DINV software to invert the data obtained by the two denoising methods and the original data respectively, and compare with the original data inversion results Compared. The results show that the data obtained by de-noising the five-point cubic smoothing method can effectively eliminate the interference, making the layering of the obtained electrical structure model clearer and coherent in the horizontal di-rection, and the distribution characteristics of the resistivity will not be changed in general. Con-tribute to the study of the vertical structure characteristics of the surface matrix of natural re-sources. KeywordsHigh-Density Resistivity Method, Random Noise, Five-Point Cubic Smoothing Method, Five-Point Linear Moving Average MethodCopyright © 2023 by author(s) and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY 4.0). /licenses/by/4.0/1. 引言高密度直流电阻率法又叫做电阻率层析成像(Resistivity Tomography)或者电成像(Electrical Imaging),该方法是20世纪80年代从美国和日本发展起来的一种直流电阻率法。
滑动平均滤波法
滑动平均滤波法
滑动平均滤波法是一种常见的信号处理方法,用于去除信号中的噪声和波动。
该方法基于数据的平均值,通过对一定时间内的数据进行滑动平均操作,来消除数据中的噪声和波动,从而得到更加平滑的信号。
滑动平均滤波法的实现方法很简单,只需要对一定时间内的数据进行平均处理即可。
具体来说,该方法是通过对一定时间内的数据进行加权平均来实现的,其中每个数据点的权重相等,而权重的总和等于滑动窗口的大小。
这样,随着时间的推移,滑动平均滤波法可以逐渐消除信号中的噪声和波动,从而得到更加稳定和准确的信号。
滑动平均滤波法的优点是简单易用,可以适用于各种类型的信号处理,并且可以通过调整滑动窗口的大小来控制滤波效果。
此外,滑动平均滤波法还可以与其他信号处理方法结合使用,例如傅里叶变换和小波变换等,以提高信号处理的准确性和可靠性。
尽管滑动平均滤波法具有许多优点,但也存在一些缺点和局限性。
首先,滑动平均滤波法无法处理非平稳信号,因为该方法假设信号是平稳的,并且忽略了信号的动态变化。
其次,滑动平均滤波法可能会导致信号的延迟,因为滤波操作需要一定的时间。
最后,滑动平均滤波法的滤波效果可能会受到滑动窗口的大小和信号的波动性影响,因此需要进行适当的调整和优化。
滑动平均滤波法是一种常用的信号处理方法,可以用于去除信号中的噪声和波动,从而得到更加平滑和稳定的信号。
虽然该方法具有一定的局限性,但通过适当的调整和优化,可以实现更加准确和可靠的信号处理。
滑动平均滤波法
滑动平均滤波法滑动平均滤波法是一种常用的数字信号处理方法,用于去除噪声和平滑信号。
它是一种简单而有效的算法,可以在实时应用中使用。
原理滑动平均滤波法是通过将一定时间内的数据进行平均来消除噪声。
具体地,每当有新数据输入时,将其加入到一个缓存区中,并计算缓存区内所有数据的平均值。
然后,将最早输入的数据移出缓存区,并重新计算平均值。
这样就可以不断更新信号的平均值,并去除噪声。
优点滑动平均滤波法具有以下优点:1. 简单易懂:该方法非常简单易懂,即使没有数字信号处理背景的人也可以轻松理解。
2. 实时性好:该方法可以实时处理数据,并且不需要大量计算资源。
3. 去噪效果好:由于该方法能够对一定时间内的数据进行平均,因此能够有效地去除噪声。
4. 对异常值不敏感:由于该方法只是对一定时间内的数据进行平均,所以对于某些异常值并不会产生过度影响。
应用滑动平均滤波法广泛应用于各种领域,例如:1. 传感器数据处理:在传感器数据处理中,由于存在各种噪声和干扰,因此需要使用滑动平均滤波法来去除这些干扰。
2. 信号处理:在音频、视频等信号处理中,滑动平均滤波法也是一种常用的去噪方法。
3. 金融数据分析:在金融数据分析中,滑动平均滤波法可以用来平滑股票价格等数据,并去除噪声。
4. 图像处理:在图像处理中,滑动平均滤波法可以用来去除图像上的噪点和毛刺。
注意事项使用滑动平均滤波法时需要注意以下几点:1. 缓存区大小:缓存区大小需要根据实际情况进行调整。
如果缓存区太小,则可能会导致信号过于敏感;如果缓存区太大,则可能会导致实时性变差。
2. 平均值计算方法:不同的平均值计算方法可能会产生不同的效果。
例如,简单平均和加权平均等方法都可以用来计算平均值。
3. 去噪效果:虽然该方法能够有效地去除噪声,但是对于某些特殊情况,如非常强的噪声干扰或信号中存在大量的异常值等,可能会产生不理想的效果。
总结滑动平均滤波法是一种简单而有效的数字信号处理方法,可以用来去除噪声和平滑信号。
滑动平均滤波算法
滑动平均滤波算法滑动平均滤波算法是一种常用的信号处理方法,它可以有效地平滑噪声信号,提取出信号中的趋势信息。
该算法通过对信号序列进行滑动窗口求均值的方式,将窗口内的信号数据进行平均处理,从而获得平滑后的输出信号。
下面将从算法原理、应用场景以及实现方法等方面对滑动平均滤波算法进行详细介绍。
一、算法原理滑动平均滤波算法的核心思想是将滑动窗口内的数据进行平均处理,通过去除窗口内数据的噪声成分,来得到平滑的输出信号。
具体步骤如下:1.设定滑动窗口的大小N,N的取值根据所需平滑程度来确定。
一般来说,N越大,平滑效果越好,但同时也会导致信号的滞后性增加。
2.初始化一个长度为N的缓冲区,用于存储滑动窗口内的数据。
3.依次输入待平滑的数据,将数据依次放入缓冲区,并计算缓冲区内所有数据的平均值。
4.每当输入一个新的数据时,将最旧的数据从缓冲区中移除,然后将新数据加入缓冲区,并重新计算缓冲区内所有数据的平均值。
5.重复上述步骤,直到所有数据都被处理完毕,最后得到平滑后的输出信号。
二、应用场景滑动平均滤波算法广泛应用于噪声信号平滑处理,特别适用于以下场景:1.传感器信号处理:在采集传感器信号过程中,由于环境噪声和传感器自身噪声的影响,得到的信号可能存在较大的波动。
滑动平均滤波算法可以有效地平滑信号,提取出信号的有效信息。
2.数据采集系统:对数据采集系统输出的信号进行处理,可以减少异常数据的影响,增加数据的稳定性和可靠性。
3.控制系统:在控制系统中,输入信号可能受到干扰,滑动平均滤波可以减少噪声对控制系统的影响,提高系统的稳定性和控制精度。
三、实现方法滑动平均滤波算法的实现比较简单,可以使用传统的编程语言进行实现。
以下以Python语言为例,简要介绍实现方法:```pythondef moving_average_filter(data, N):buffer = [0] * N #初始化缓冲区output = [] #存储平滑后的输出信号for i in range(len(data)):buffer.pop(0) #移除最旧的数据buffer.append(data[i]) #加入新数据average = sum(buffer) / N #计算平均值output.append(average) #存储输出信号return output```在以上代码中,`data`为待平滑的信号数据,`N`为滑动窗口的大小。
快速滑动平均滤波在PPG信号去噪中的应用
果表明,该方法能实时有效地对 PPG 信号进行去噪处理,对提高物联网设备中的 PPG 信号检测精度和速度具有重
要意义。
关键词 :滑动平均滤波 ;光电容积脉搏波 ;高频噪声 ;嵌入式设备 ;MAX30101 ;物联网
中图分类号 :TP391
文献标识码 :A
文章编号 :2095-1302(2019)06-0041-03
图 2 所示为滑动窗口宽度 L=11 时的幅频特性图,截止 频率约为 5.0 Hz。
图 3 移动平均滤波器截止频率与窗宽关系(fs=100 Hz)
1.3 滑动平均滤波器算法改进 假设窗口宽度 L=11,滤波器输出为 :
y6 = ( x1+x2 +x3 + ⋅⋅⋅ +x11 ) / 11, y7 = ( x2 +x3 +x4 + ⋅⋅⋅ +x12 ) / 11 (6)
由式(6)可知,每采集一个数据,CPU 将进行一次 L 个数据的累加,然后再计算平均值。当 L 取值较大时,需进 行 L 次累加运算,滑动平均运算对 CPU 资源和 RAM 空间耗 费较大,影响系统的响应速度,观察式(5)发现,每次新 测量值相对于上一次的测量值仅有 2 个点不同,丢掉最早的 点,累加最新的点,为此将上式改为 :
为 N,每次采样到一个新数据放入队尾,并扔掉原来队首的
数据(先进先出原则),把队列中的 N 个数据进行算术平均
运算,获得新的滤波结果,计算公式如式(1):
∑ y(n) = 1
n+m
x(n − k)
2m +1 k=n−m
(1)
式中:m 为正整数;L=2m+1,为滤波器阶数,等于滑动窗
口的宽度,L 为奇数。
快速滑动平均滤波在PPG信号去噪中的应用

快速滑动平均滤波在PPG信号去噪中的应用作者:胡芳凝王忠刘超群来源:《物联网技术》2019年第06期摘要:光电容积脉搏波采集过程中存在的高频噪声会给后续测量带来困难,去除噪声干扰是准确进行相关参数测量的关键。
常用的滤波方法对处理器的运算能力和存储空间有较高的要求,不适合在物联网应用场景中应用。
针对嵌入式设备计算能力弱和存储容量小的特点,提出一种基于快速滑动平均滤波的信号去噪算法,分析了滑动窗口宽度与信号截止频率的关系,并用该算法对血氧饱和度传感器MAX30101的原始输出信号进行了处理,实验结果表明,该方法能实时有效地对PPG信号进行去噪处理,对提高物联网设备中的PPG信号检测精度和速度具有重要意义。
关键词:滑动平均滤波;光电容积脉搏波;高频噪声;嵌入式设备;MAX30101;物联网中图分类号:TP391 文献标识码:A 文章编号:2095-1302(2019)06-00-030 引言光电容积脉搏波(Photo Plethysmo Graphy,PPG)描记法是一种无创连续测量血氧饱和度和心率的方法[1]。
PPG信号是低幅低频的微弱信号,采集过程中容易受肢体运动和环境光等干扰,影响后续信号特征的准确提取[2]。
常用的IIR和FIR数字滤波等方法,滤波器系数一般为浮点数,不利于实时计算[3]。
使用小波变换处理信号时,分解层数的确定、变换尺度选取比较困难,且小波分解与重构计算量大,对处理器有较高的要求[4]。
自适应滤波须选取一个参考信号,该信号与噪声有关但与有效信号无关,需要不断递归更新参数值,运算较为复杂,运算量大[5]。
形态学滤波虽然运算量不大,但运算过程中仍包括2次形态闭开运算和2次形态开闭运算,而形态开闭运算又包含1次膨胀及1次腐蚀运算,因此形态学滤波法的运算量也较大[6]。
这些算法虽然在模拟仿真环境下取得了不错的效果,但对处理器运算能力要求较高,限制了算法的应用范围。
考虑到PPG信号的应用场景多为基于物联网的应用或嵌入式系统,如血氧测量仪、智能穿戴设备等,其处理器的运算能力和存储空间有限,但又有较强的实时性要求。
滑动平均系统的去噪处理
信号与系统实验大作业滑动平均系统的去噪处理题目:(1) 画出(k=1:50)原始信号f[k]波形图,噪声干扰信号d[k]及加噪后的信号时域图。
(其中,d[k]可以下列语句产生:d=2*(rand(1,R)(2) 画出去噪后y[k] (k=1:50)的信号时域图(3) 讨论M=2时,去噪效果如何内容:设输入信号为受噪声干扰的信号为f[k]=s[k]+d[k],其中)400/sin(**2][πk k k s =是原始信号,d[k]是噪声。
已知M 点滑动平均系统的输入输出关系为:101[][]M n y k f k n M -==-∑试利用MATLAB 编程实现(k=1:50)用M =5点滑动平均系统对受噪声干扰的信号去噪。
程序:% program 8_3 Signal smoothing by moving average filterR=51;% length of input signal% generate ,uniformly distributed random numberd=rand(1,R);k=0:R-1;s=2*k.*sin(k.*pi./400);f=s+d;figure(1); plot(k,d, 'r-.',k,s, 'b: ',k,f, 'k-');xlabel('Time index k');legend('d[k]', 's[k] ', 'f[k] ');M=5;b=ones(M,1)/M;a=1;y=filter(b,a,f);figure(2);plot( k,s, 'b:',k,y,'r-');xlabel( 'Time index k');legend('s[k] ', 'y[k]');M=2;b=ones(M,1)/M;a=1;y=filter(b,a,f);figure(3);plot( k,s, 'b:',k,y,'r-');xlabel( 'Time index k');legend('s[k] ', 'y[k]');图形:题目1图(a)题目2图(b)题目3图(c)分析:1.图(a)中三条曲线分别为噪声信号d[k]、原始信号s[k]和受噪声干扰的输入信号f[k]。
滑动平均去噪原理
滑动平均去噪原理嗨,朋友们!今天咱们来聊聊一个超级有趣又特别实用的东西——滑动平均去噪原理。
你有没有遇到过这样的情况,你拿到一组数据,哎呀,里面全是些乱糟糟的波动,就像平静的湖面上突然涌起了无数的小漩涡,让你根本看不清这湖水原本的模样。
这时候,滑动平均就像一个神奇的魔法棒,能把那些烦人的噪声给赶跑。
我先给你讲个小故事吧。
我有个朋友,他是做股票分析的。
他每天都要面对大量的股票价格数据。
这些数据呀,就像调皮的小精灵,上蹿下跳的。
有时候明明他觉得这只股票应该是平稳上升的趋势,可那些突然出现的小波动,就像捣蛋鬼一样,让他很难准确判断。
有一次,他向我诉苦说:“这数据乱得像一团麻,我都不知道从哪儿下手了。
”我就跟他说:“你怎么不用滑动平均呢?”他一脸疑惑地看着我,就像我在说外星语一样。
那滑动平均到底是怎么回事呢?简单来说,就好比你站在一个长长的队伍里,你想知道这个队伍的平均身高。
滑动平均呢,就是你不是一次性把所有人的身高都加起来求平均,而是每次只看相邻的几个人。
比如说,你先看前面三个人的身高,求个平均,然后再往前挪一个人,看新的相邻三个人的身高再求平均,就这么依次滑动着计算平均。
对于数据来说也是一样的道理。
我们有一组数据点,假如这组数据是关于某个物理量随时间的变化。
那些突然出现的、不符合整体趋势的大波动或者小跳动,就像是混入正规军里的杂牌军。
滑动平均就像是一个严厉的指挥官,他要把那些看起来格格不入的数据点给处理一下。
咱们来具体一点啊。
假设我们有这样一组数据:[1, 3, 5, 10, 4, 6, 8]。
如果我们要做一个简单的三点滑动平均。
对于第一个数据点1,我们要和它后面的3、5一起求平均,(1 + 3 + 5) / 3 = 3。
然后对于3呢,我们就用3、5、10来求平均,(3 + 5 + 10) / 3 = 6。
就这么一个一个地滑动着计算。
你看,这样原来数据里那些突然很大或者很小的值,经过这么一平均,是不是就变得相对平滑了呢?这就像把一块凹凸不平的石头,慢慢地打磨平滑了一样。
滑动平均滤波公式
滑动平均滤波公式滑动平均滤波公式是一种在信号处理和数据分析中常用的方法,它能有效地平滑数据,减少噪声的影响。
咱们先来说说这个公式到底是啥。
简单来讲,滑动平均滤波就是把一系列数据点加起来求平均值。
比如说,有一组数据10、15、20、25、30,咱们要计算三个数据点的滑动平均值,那第一个平均值就是 (10 + 15 + 20) / 3 = 15 。
第二个平均值就是 (15 + 20 + 25) / 3 = 20 。
就这么依次往后算。
我记得有一次在学校的实验室里,我们正在做一个物理实验,测量物体下落的速度。
由于测量设备的精度问题,得到的数据波动很大。
这时候,老师就提到了可以用滑动平均滤波的方法来处理这些数据。
当时大家都一脸懵,不太明白这是啥意思。
老师就很耐心地给我们解释,还在黑板上一步一步地计算演示。
我看着那些数字在老师的笔下跳动,心里渐渐有了点儿眉目。
咱们再深入讲讲这个公式的应用。
在很多实际情况中,数据都会受到各种干扰,导致波动很大。
这时候滑动平均滤波就派上用场啦。
比如说,在监测气温变化的时候,每天的气温可能会因为短时间的天气变化而有较大的波动。
但如果用滑动平均滤波,就能得到一个相对平稳的趋势,更能反映出长期的气候变化。
还有在金融领域,股票价格的波动那叫一个惊心动魄。
通过滑动平均滤波,可以过滤掉那些短期的随机波动,让投资者更清楚地看到股票价格的长期走势。
另外,在工业生产中,比如测量机器的运行参数,如果数据波动太厉害,会影响对机器状态的判断。
这时候用滑动平均滤波处理一下,就能更准确地了解机器的运行情况,及时发现问题。
总之,滑动平均滤波公式虽然看起来简单,但其作用可不容小觑。
它就像是一把神奇的梳子,能把杂乱的数据梳理得整整齐齐,让我们更容易看清数据背后隐藏的规律和趋势。
就像我在实验室里的那次经历,一开始面对那些乱糟糟的数据真是头疼,但掌握了滑动平均滤波这个工具后,问题就迎刃而解了。
相信在未来的学习和工作中,我们还会经常用到它,让我们的数据处理变得更加高效和准确!。
滑动平均滤波详解(PDF)
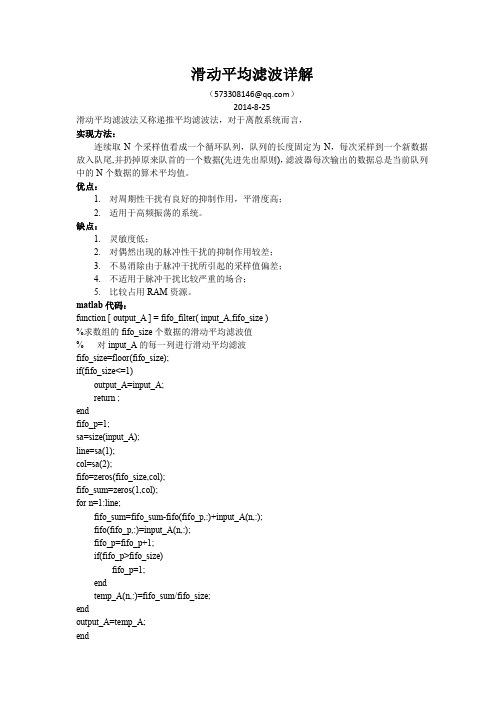
滑动平均滤波详解(****************)2014-8-25滑动平均滤波法又称递推平均滤波法,对于离散系统而言,实现方法:连续取N个采样值看成一个循环队列,队列的长度固定为N,每次采样到一个新数据放入队尾,并扔掉原来队首的一个数据(先进先出原则),滤波器每次输出的数据总是当前队列中的N个数据的算术平均值。
优点:1.对周期性干扰有良好的抑制作用,平滑度高;2.适用于高频振荡的系统。
缺点:1.灵敏度低;2.对偶然出现的脉冲性干扰的抑制作用较差;3.不易消除由于脉冲干扰所引起的采样值偏差;4.不适用于脉冲干扰比较严重的场合;5.比较占用RAM资源。
matlab代码:function [ output_A ] = fifo_filter( input_A,fifo_size )%求数组的fifo_size个数据的滑动平均滤波值% 对input_A的每一列进行滑动平均滤波fifo_size=floor(fifo_size);if(fifo_size<=1)output_A=input_A;return ;endfifo_p=1;sa=size(input_A);line=sa(1);col=sa(2);fifo=zeros(fifo_size,col);fifo_sum=zeros(1,col);for n=1:line;fifo_sum=fifo_sum-fifo(fifo_p,:)+input_A(n,:);fifo(fifo_p,:)=input_A(n,:);fifo_p=fifo_p+1;if(fifo_p>fifo_size)fifo_p=1;endtemp_A(n,:)=fifo_sum/fifo_size;endoutput_A=temp_A;end对于连续系统而言,滤波器输出的表达式如下:001()()t t T y t f x dx T -=⎰ (1)式(1)中,y(t)是滤波器的输出,f(x)是滤波器的输入,T 0是滑动滤波长度。
滑动平均滤波
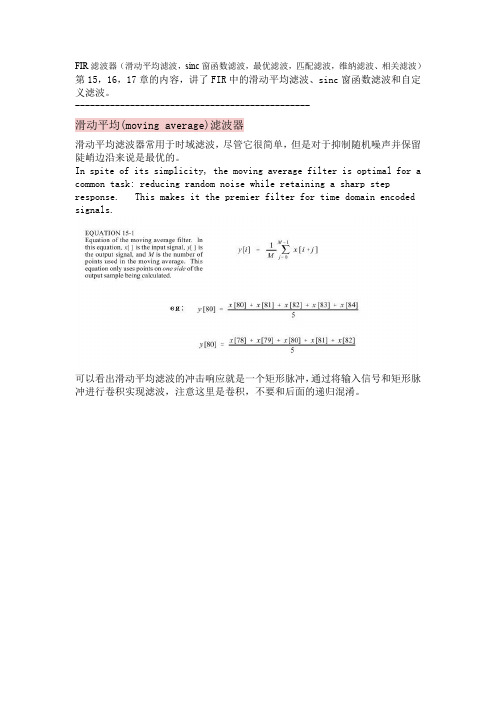
FIR滤波器(滑动平均滤波,sinc窗函数滤波,最优滤波,匹配滤波,维纳滤波、相关滤波)第15,16,17章的内容,讲了FIR中的滑动平均滤波、sinc窗函数滤波和自定义滤波。
-----------------------------------------------滑动平均(moving average)滤波器滑动平均滤波器常用于时域滤波,尽管它很简单,但是对于抑制随机噪声并保留陡峭边沿来说是最优的。
In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response. This makes it the premier filter for time domain encoded signals.可以看出滑动平均滤波的冲击响应就是一个矩形脉冲,通过将输入信号和矩形脉冲进行卷积实现滤波,注意这里是卷积,不要和后面的递归混淆。
滑动平均滤波器的频响:时域效果好,频域效果就差,所以如果用来分频的话,则不用滑动平均滤波器,滑动平均滤波器主要用于抑制噪声对信号的干扰。
为了使时域和频域的效果有个折中,这里对最原始的滑动平均滤波器做下改变,如下图所示,其中1 pass就是最原始的滑动平均滤波器。
下面讲了为什么滑动平均滤波实现起来很快的原因:可以看到虽然滑动平均滤波属于FIR,并且通过卷积来运算,但是如果进行递归运算会加快速度,不过需要注意的是这和后面将的IIR的递归是两个方面的意思。
-----------------------------------------------sinc窗函数滤波(windowed-sinc filter,书中翻译叫什么?)与前面的滑动平均滤波不同(主要用于时域),sinc窗函数是用于滤除频率的(主要用于频域),就像前面所说,sinc窗函数虽然在频域用于良好的性能,但是在时域方面性能就差了,表现为ripple(波纹,书中翻译叫什么?)和overshoot(书中翻译叫什么?)。
数字图像中平滑去噪技术研究及实现
现代计算机2010.06数字图像中平滑去噪技术研究及实现双娜(东华理工大学信息与电子工程学院,抚州344000)关键词:噪声;均值滤波;平滑;中值滤波收稿日期:2010-04-12修稿日期:2010-04-26作者简介:双娜(1984-),女,江西抚州人,本科,讲师,从事领域为计算机科学与技术教学介绍图像的获取传输等过程中所产生的噪声类型,讲述均值滤波和中值滤波两种平滑技术的原理及利用这两种技术来实现去噪声的功能,通过对实验结果的比较讨论这两种平滑技术的性能优劣。
摘要:0引言21世纪是一个信息时代,图像作为人类感知世界的基础,是人类获取信息、表达信息和传递信息的重要手段。
许多事物用很多的文字都很难表达清楚但用一幅图像就可以描述得很明白。
数字图像处理的目的,就是对数字化后的图像信息进行某些运算或处理,以提高图像的质量或达到人们所要求的预期结果。
例如,对被噪声污染的图像去除噪声,恢复图像本来面目。
1图像的噪声及平滑技术原理噪声可以理解为妨碍人们感觉器官对所接收的信源信息理解的因素。
噪声对图像信号幅度和相位的影响十分复杂,有些噪声和图像信号互相独立不相关,有些是相关,噪声本身之间也可能相关。
要减少图像中的噪声,必须针对具体情况采用不同的方法。
图像平滑(Smoothing)是一种实用的数字图像处理技术,主要的目的是减少噪声。
一个较好的平滑方法应该既可以消掉噪声影响又不使图像的边缘轮廓和线条变模糊。
图像平滑处理方法有空域法和频域法两大类。
在空间域里一类方法是噪声去除,即先判定某点是否为噪声点,若是,重新赋值,若不是按原值输出;另一类是平均,即不依赖于噪声点的识别和去除,而对整个图像进行平均运算。
在频率域里是对图像频谱进行修正,一般采用低通滤波方法,而不像在空间域里直接对图像像素灰度级值进行运算。
2图像平滑具体算法2.1均值滤波局部平滑法是一种直接在空间域上进行平滑处理的技术。
假设图像是由许多灰度恒定的小块组成,相邻像素间存在很高的空间相关性,但噪声则是统计独立的,则可用像素领域内的各像素的灰度平均值代替该像素原来的灰度值,实现图像的平滑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号与系统实验大作业
滑动平均系统的去噪处理
题目:
(1) 画出(k=1:50)原始信号f[k]波形图,噪声干扰信号d[k]及加噪后的信号
时域图。
(其中,d[k]可以下列语句产生:d=2*(rand(1,R)-0.5)
(2) 画出去噪后y[k] (k=1:50)的信号时域图
(3) 讨论M=2时,去噪效果如何?
内容:
设输入信号为受噪声干扰的信号为f[k]=s[k]+d[k],其中)400/sin(**2][πk k k s =是原始信号,d[k]是噪声。
已知M 点滑动平均系统的输入输出关系为:
101[][]M n y k f k n M -==-∑
试利用MATLAB 编程实现(k=1:50)用M =5点滑动平均系统对受噪声干扰的信号去噪。
程序:
% program 8_3 Signal smoothing by moving average filter
R=51;% length of input signal
% generate (-0.5,0.5)uniformly distributed random number
d=rand(1,R)-0.5;
k=0:R-1;
s=2*k.*sin(k.*pi./400);
f=s+d;
figure(1); plot(k,d, 'r-.',k,s, 'b: ',k,f, 'k-');
xlabel('Time index k');legend('d[k]', 's[k] ', 'f[k] ');
M=5;b=ones(M,1)/M;a=1;
y=filter(b,a,f);
figure(2);plot( k,s, 'b:',k,y,'r-');
xlabel( 'Time index k');legend('s[k] ', 'y[k]');
M=2;b=ones(M,1)/M;a=1;
y=filter(b,a,f);
figure(3);plot( k,s, 'b:',k,y,'r-');
xlabel( 'Time index k');legend('s[k] ', 'y[k]');
图形:
题目1
图(a)题目2
图(b)题目3
图(c)
分析:
1.图(a)中三条曲线分别为噪声信号d[k]、原始信号s[k]和受噪声干扰的输入信号f[k]。
2.图(b)中s[k]为有用信号,y[k]是经过5点滑动平均系统去噪的结果。
比较这两条曲线可以看出,y[k]基本将所有噪声去除,但有一
部分有用信号也被去除,曲线虽然很光滑,但与标准曲线偏离较大。
3.图(C)是经过2点滑动平均系统去噪的结果,比较两条曲线可以看出,y[k]不但去除了大部分的噪声信号,而且很好地保留了有用
信号,曲线与标准曲线很接近。
4.所以综上可以得出,当M取值越大时,能去除更多的噪声,但也会影响有用信号。
所以根据本题的实际情况,对比图形,我们可以发
现,当M=2时的效果比M=5时要好。