Estimating the absolute position of a mobile robot using position probability grids
tpo65三篇阅读原文译文题目答案译文背景知识
Tpo65全套阅读解析阅读-1 (1)原文 (2)译文 (3)题目 (5)答案 (9)背景知识 (10)阅读-2 (15)原文 (15)译文 (16)题目 (18)答案 (22)背景知识 (23)阅读-3 (24)原文 (24)译文 (26)题目 (27)答案 (31)背景知识 (32)阅读-1原文The Pit Organs of Snakes①It is thought that the facial pits or pit organs on the head of some snakes are specialized infrared(heat)receptors.When a rattlesnake strikes,the direction of the strike seems to be guided by the infrared radiation from its prey.A rattlesnake strikes only at warm-blooded prey,and when the prey is dead and at room temperature,the snake will not strike.However,a blindfolded snake strikes correctly at a dead rat that is pulled across the cage,provided the rat is warmer than the surroundings.Blindfolded,the snake cannot be guided by vision;nor is it guided by the sense of smell,for it will strike correctly even at a moving, cloth-wrapped electric bulb.The pit organs are evidently involved in sensing the location of warm objects.All snakes that have pit organs feed preferentially on warm-blooded prey,and this further supports the view that these organs are infrared sensors.In the rattlesnake the pit organs are located,one on each side, between the nostril and the eye;they are connected to many nerves,and this in itself suggests a sensory role for the organ.②The sensitivity of the facial pit has been examined by recording the activity in the nerve leading from the organ.A variety of stimuli,such as sound,vibration,or light of moderate intensity(with the infrared part of the spectrum filtered out),has no detectable effect on the activity in the nerve.However,if objects of a temperature different from the surroundings are brought into the receptive field around the head,there is a striking change in nerve activity,regardless of the temperature of the intervening air.③How is the infrared radiation sensed?The pit is covered by a thin transparent membrane,and it has been suggested that a rise in temperature in the pit behind the membrane could cause an expansion of the gas with a consequent deformation of the membrane.This in turn could be sensed by a suitable receptor. This hypothesis is highly improbable,for a cut in the membrane that opens the pit to the outside air causes no loss in responsiveness,a result that is incompatible with the hypothesis that a pressure change is sensed.④We are left with two other possibilities to consider:Either the effect is photochemical,which means that the infrared radiation is absorbed by a specificcompound,analogous to the light-sensitive pigments in the eye,or the pit organs are sensitive to the slight temperature rise caused when infrared radiation reaches it.The infrared radiation emitted from a mammalian body has low quantum energy, which makes any photochemical effect on a pigment extremely unlikely.Pure infrared radiation can be produced by a laser,and experiments with such radiation of known wavelength provide strong evidence that the mode of reception in the facial pit organ is entirely thermal.⑤Can the pit organs be used for perception of the infrared source in the way our two eyes are used for stereoscopic vision?This seems likely,not only from observations of the precision with which a snake can strike,but also from studies of its brain activity.When infrared radiation falls on the facial pit organ,electric activity can be recorded from the optic tectum,the part of the brain with which the optic nerve is connected.This in itself is suggestive;although the nerves from the pit organ are completely separate from the optic nerves,the same part of the brain seems to handle visual information,which is known to be stereoscopic,and infrared information.The optic tectum has left and right parts,located on either side of the brain.Each part receives input from each eye via the optic chiasma,the point at which the optic nerves from the left and right eye meet.Many of the neurons in the tectum respond to stimulation of the pit organ on the opposite side of the head.This is reminiscent of the way information from the eyes is handled; the crossover of the optic nerve in the optic chiasma is essential for stereoscopic vision and interpretation of rmation from the two pit organs is apparently coordinated and interpreted in a similar way,a conclusion in agreement with recorded changes in the neural activity in the tectum when the infrared source is in a position to irradiate both pits at once.It therefore appears that the facial pits indeed provide stereoscopic perception and substantially aid in the precision of estimating the location of prey.译文蛇的坑状器官①据认为,一些蛇面部的凹陷或头部的凹陷器官是特殊的红外(热)感受器。
Multicamera People Tracking with a Probabilistic Occupancy Map
Multicamera People Tracking witha Probabilistic Occupancy MapFranc¸ois Fleuret,Je´roˆme Berclaz,Richard Lengagne,and Pascal Fua,Senior Member,IEEE Abstract—Given two to four synchronized video streams taken at eye level and from different angles,we show that we can effectively combine a generative model with dynamic programming to accurately follow up to six individuals across thousands of frames in spite of significant occlusions and lighting changes.In addition,we also derive metrically accurate trajectories for each of them.Our contribution is twofold.First,we demonstrate that our generative model can effectively handle occlusions in each time frame independently,even when the only data available comes from the output of a simple background subtraction algorithm and when the number of individuals is unknown a priori.Second,we show that multiperson tracking can be reliably achieved by processing individual trajectories separately over long sequences,provided that a reasonable heuristic is used to rank these individuals and that we avoid confusing them with one another.Index Terms—Multipeople tracking,multicamera,visual surveillance,probabilistic occupancy map,dynamic programming,Hidden Markov Model.Ç1I NTRODUCTIONI N this paper,we address the problem of keeping track of people who occlude each other using a small number of synchronized videos such as those depicted in Fig.1,which were taken at head level and from very different angles. This is important because this kind of setup is very common for applications such as video surveillance in public places.To this end,we have developed a mathematical framework that allows us to combine a robust approach to estimating the probabilities of occupancy of the ground plane at individual time steps with dynamic programming to track people over time.This results in a fully automated system that can track up to six people in a room for several minutes by using only four cameras,without producing any false positives or false negatives in spite of severe occlusions and lighting variations. As shown in Fig.2,our system also provides location estimates that are accurate to within a few tens of centimeters, and there is no measurable performance decrease if as many as20percent of the images are lost and only a small one if 30percent are.This involves two algorithmic steps:1.We estimate the probabilities of occupancy of theground plane,given the binary images obtained fromthe input images via background subtraction[7].Atthis stage,the algorithm only takes into accountimages acquired at the same time.Its basic ingredientis a generative model that represents humans assimple rectangles that it uses to create synthetic idealimages that we would observe if people were at givenlocations.Under this model of the images,given thetrue occupancy,we approximate the probabilities ofoccupancy at every location as the marginals of aproduct law minimizing the Kullback-Leibler diver-gence from the“true”conditional posterior distribu-tion.This allows us to evaluate the probabilities ofoccupancy at every location as the fixed point of alarge system of equations.2.We then combine these probabilities with a color and amotion model and use the Viterbi algorithm toaccurately follow individuals across thousands offrames[3].To avoid the combinatorial explosion thatwould result from explicitly dealing with the jointposterior distribution of the locations of individuals ineach frame over a fine discretization,we use a greedyapproach:we process trajectories individually oversequences that are long enough so that using areasonable heuristic to choose the order in which theyare processed is sufficient to avoid confusing peoplewith each other.In contrast to most state-of-the-art algorithms that recursively update estimates from frame to frame and may therefore fail catastrophically if difficult conditions persist over several consecutive frames,our algorithm can handle such situations since it computes the global optima of scores summed over many frames.This is what gives it the robustness that Fig.2demonstrates.In short,we combine a mathematically well-founded generative model that works in each frame individually with a simple approach to global optimization.This yields excellent performance by using basic color and motion models that could be further improved.Our contribution is therefore twofold.First,we demonstrate that a generative model can effectively handle occlusions at each time frame independently,even when the input data is of very poor quality,and is therefore easy to obtain.Second,we show that multiperson tracking can be reliably achieved by processing individual trajectories separately over long sequences.. F.Fleuret,J.Berclaz,and P.Fua are with the Ecole Polytechnique Fe´de´ralede Lausanne,Station14,CH-1015Lausanne,Switzerland.E-mail:{francois.fleuret,jerome.berclaz,pascal.fua}@epfl.ch..R.Lengagne is with GE Security-VisioWave,Route de la Pierre22,1024Ecublens,Switzerland.E-mail:richard.lengagne@.Manuscript received14July2006;revised19Jan.2007;accepted28Mar.2007;published online15May2007.Recommended for acceptance by S.Sclaroff.For information on obtaining reprints of this article,please send e-mail to:tpami@,and reference IEEECS Log Number TPAMI-0521-0706.Digital Object Identifier no.10.1109/TPAMI.2007.1174.0162-8828/08/$25.00ß2008IEEE Published by the IEEE Computer SocietyIn the remainder of the paper,we first briefly review related works.We then formulate our problem as estimat-ing the most probable state of a hidden Markov process and propose a model of the visible signal based on an estimate of an occupancy map in every time frame.Finally,we present our results on several long sequences.2R ELATED W ORKState-of-the-art methods can be divided into monocular and multiview approaches that we briefly review in this section.2.1Monocular ApproachesMonocular approaches rely on the input of a single camera to perform tracking.These methods provide a simple and easy-to-deploy setup but must compensate for the lack of 3D information in a single camera view.2.1.1Blob-Based MethodsMany algorithms rely on binary blobs extracted from single video[10],[5],[11].They combine shape analysis and tracking to locate people and maintain appearance models in order to track them,even in the presence of occlusions.The Bayesian Multiple-BLob tracker(BraMBLe)system[12],for example,is a multiblob tracker that generates a blob-likelihood based on a known background model and appearance models of the tracked people.It then uses a particle filter to implement the tracking for an unknown number of people.Approaches that track in a single view prior to computing correspondences across views extend this approach to multi camera setups.However,we view them as falling into the same category because they do not simultaneously exploit the information from multiple views.In[15],the limits of the field of view of each camera are computed in every other camera from motion information.When a person becomes visible in one camera,the system automatically searches for him in other views where he should be visible.In[4],a background/foreground segmentation is performed on calibrated images,followed by human shape extraction from foreground objects and feature point selection extraction. Feature points are tracked in a single view,and the system switches to another view when the current camera no longer has a good view of the person.2.1.2Color-Based MethodsTracking performance can be significantly increased by taking color into account.As shown in[6],the mean-shift pursuit technique based on a dissimilarity measure of color distributions can accurately track deformable objects in real time and in a monocular context.In[16],the images are segmented pixelwise into different classes,thus modeling people by continuously updated Gaussian mixtures.A standard tracking process is then performed using a Bayesian framework,which helps keep track of people,even when there are occlusions.In such a case,models of persons in front keep being updated, whereas the system stops updating occluded ones,which may cause trouble if their appearances have changed noticeably when they re-emerge.More recently,multiple humans have been simulta-neously detected and tracked in crowded scenes[20]by using Monte-Carlo-based methods to estimate their number and positions.In[23],multiple people are also detected and tracked in front of complex backgrounds by using mixture particle filters guided by people models learned by boosting.In[9],multicue3D object tracking is addressed by combining particle-filter-based Bayesian tracking and detection using learned spatiotemporal shapes.This ap-proach leads to impressive results but requires shape, texture,and image depth information as input.Finally, Smith et al.[25]propose a particle-filtering scheme that relies on Markov chain Monte Carlo(MCMC)optimization to handle entrances and departures.It also introduces a finer modeling of interactions between individuals as a product of pairwise potentials.2.2Multiview ApproachesDespite the effectiveness of such methods,the use of multiple cameras soon becomes necessary when one wishes to accurately detect and track multiple people and compute their precise3D locations in a complex environment. Occlusion handling is facilitated by using two sets of stereo color cameras[14].However,in most approaches that only take a set of2D views as input,occlusion is mainly handled by imposing temporal consistency in terms of a motion model,be it Kalman filtering or more general Markov models.As a result,these approaches may not always be able to recover if the process starts diverging.2.2.1Blob-Based MethodsIn[19],Kalman filtering is applied on3D points obtained by fusing in a least squares sense the image-to-world projections of points belonging to binary blobs.Similarly,in[1],a Kalman filter is used to simultaneously track in2D and3D,and objectFig.1.Images from two indoor and two outdoor multicamera video sequences that we use for our experiments.At each time step,we draw a box around people that we detect and assign to them an ID number that follows them throughout thesequence.Fig.2.Cumulative distributions of the position estimate error on a3,800-frame sequence(see Section6.4.1for details).locations are estimated through trajectory prediction during occlusion.In[8],a best hypothesis and a multiple-hypotheses approaches are compared to find people tracks from 3D locations obtained from foreground binary blobs ex-tracted from multiple calibrated views.In[21],a recursive Bayesian estimation approach is used to deal with occlusions while tracking multiple people in multiview.The algorithm tracks objects located in the intersections of2D visual angles,which are extracted from silhouettes obtained from different fixed views.When occlusion ambiguities occur,multiple occlusion hypotheses are generated,given predicted object states and previous hypotheses,and tested using a branch-and-merge strategy. The proposed framework is implemented using a customized particle filter to represent the distribution of object states.Recently,Morariu and Camps[17]proposed a method based on dimensionality reduction to learn a correspondence between the appearance of pedestrians across several views. This approach is able to cope with the severe occlusion in one view by exploiting the appearance of the same pedestrian on another view and the consistence across views.2.2.2Color-Based MethodsMittal and Davis[18]propose a system that segments,detects, and tracks multiple people in a scene by using a wide-baseline setup of up to16synchronized cameras.Intensity informa-tion is directly used to perform single-view pixel classifica-tion and match similarly labeled regions across views to derive3D people locations.Occlusion analysis is performed in two ways:First,during pixel classification,the computa-tion of prior probabilities takes occlusion into account. Second,evidence is gathered across cameras to compute a presence likelihood map on the ground plane that accounts for the visibility of each ground plane point in each view. Ground plane locations are then tracked over time by using a Kalman filter.In[13],individuals are tracked both in image planes and top view.The2D and3D positions of each individual are computed so as to maximize a joint probability defined as the product of a color-based appearance model and2D and 3D motion models derived from a Kalman filter.2.2.3Occupancy Map MethodsRecent techniques explicitly use a discretized occupancy map into which the objects detected in the camera images are back-projected.In[2],the authors rely on a standard detection of stereo disparities,which increase counters associated to square areas on the ground.A mixture of Gaussians is fitted to the resulting score map to estimate the likely location of individuals.This estimate is combined with a Kallman filter to model the motion.In[26],the occupancy map is computed with a standard visual hull procedure.One originality of the approach is to keep for each resulting connex component an upper and lower bound on the number of objects that it can contain. Based on motion consistency,the bounds on the various components are estimated at a certain time frame based on the bounds of the components at the previous time frame that spatially intersect with it.Although our own method shares many features with these techniques,it differs in two important respects that we will highlight:First,we combine the usual color and motion models with a sophisticated approach based on a generative model to estimating the probabilities of occu-pancy,which explicitly handles complex occlusion interac-tions between detected individuals,as will be discussed in Section5.Second,we rely on dynamic programming to ensure greater stability in challenging situations by simul-taneously handling multiple frames.3P ROBLEM F ORMULATIONOur goal is to track an a priori unknown number of people from a few synchronized video streams taken at head level. In this section,we formulate this problem as one of finding the most probable state of a hidden Markov process,given the set of images acquired at each time step,which we will refer to as a temporal frame.We then briefly outline the computation of the relevant probabilities by using the notations summarized in Tables1and2,which we also use in the following two sections to discuss in more details the actual computation of those probabilities.3.1Computing the Optimal TrajectoriesWe process the video sequences by batches of T¼100frames, each of which includes C images,and we compute the most likely trajectory for each individual.To achieve consistency over successive batches,we only keep the result on the first 10frames and slide our temporal window.This is illustrated in Fig.3.We discretize the visible part of the ground plane into a finite number G of regularly spaced2D locations and we introduce a virtual hidden location H that will be used to model entrances and departures from and into the visible area.For a given batch,let L t¼ðL1t;...;L NÃtÞbe the hidden stochastic processes standing for the locations of individuals, whether visible or not.The number NÃstands for the maximum allowable number of individuals in our world.It is large enough so that conditioning on the number of visible ones does not change the probability of a new individual entering the scene.The L n t variables therefore take values in f1;...;G;Hg.Given I t¼ðI1t;...;I C tÞ,the images acquired at time t for 1t T,our task is to find the values of L1;...;L T that maximizePðL1;...;L T j I1;...;I TÞ:ð1ÞAs will be discussed in Section 4.1,we compute this maximum a posteriori in a greedy way,processing one individual at a time,including the hidden ones who can move into the visible scene or not.For each one,the algorithm performs the computation,under the constraint that no individual can be at a visible location occupied by an individual already processed.In theory,this approach could lead to undesirable local minima,for example,by connecting the trajectories of two separate people.However,this does not happen often because our batches are sufficiently long.To further reduce the chances of this,we process individual trajectories in an order that depends on a reliability score so that the most reliable ones are computed first,thereby reducing the potential for confusion when processing the remaining ones. This order also ensures that if an individual remains in the hidden location,then all the other people present in the hidden location will also stay there and,therefore,do not need to be processed.FLEURET ET AL.:MULTICAMERA PEOPLE TRACKING WITH A PROBABILISTIC OCCUPANCY MAP269Our experimental results show that our method does not suffer from the usual weaknesses of greedy algorithms such as a tendency to get caught in bad local minima.We thereforebelieve that it compares very favorably to stochastic optimization techniques in general and more specifically particle filtering,which usually requires careful tuning of metaparameters.3.2Stochastic ModelingWe will show in Section 4.2that since we process individual trajectories,the whole approach only requires us to define avalid motion model P ðL n t þ1j L nt ¼k Þand a sound appearance model P ðI t j L n t ¼k Þ.The motion model P ðL n t þ1j L nt ¼k Þ,which will be intro-duced in Section 4.3,is a distribution into a disc of limited radiusandcenter k ,whichcorresponds toalooseboundonthe maximum speed of a walking human.Entrance into the scene and departure from it are naturally modeled,thanks to the270IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,VOL.30,NO.2,FEBRUARY 2008TABLE 2Notations (RandomQuantities)Fig.3.Video sequences are processed by batch of 100frames.Only the first 10percent of the optimization result is kept and the rest is discarded.The temporal window is then slid forward and the optimiza-tion is repeated on the new window.TABLE 1Notations (DeterministicQuantities)hiddenlocation H,forwhichweextendthemotionmodel.The probabilities to enter and to leave are similar to the transition probabilities between different ground plane locations.In Section4.4,we will show that the appearance model PðI t j L n t¼kÞcan be decomposed into two terms.The first, described in Section4.5,is a very generic color-histogram-based model for each individual.The second,described in Section5,approximates the marginal conditional probabil-ities of occupancy of the ground plane,given the results of a background subtractionalgorithm,in allviewsacquired atthe same time.This approximation is obtained by minimizing the Kullback-Leibler divergence between a product law and the true posterior.We show that this is equivalent to computing the marginal probabilities of occupancy so that under the product law,the images obtained by putting rectangles of human sizes at occupied locations are likely to be similar to the images actually produced by the background subtraction.This represents a departure from more classical ap-proaches to estimating probabilities of occupancy that rely on computing a visual hull[26].Such approaches tend to be pessimistic and do not exploit trade-offs between the presence of people at different locations.For instance,if due to noise in one camera,a person is not seen in a particular view,then he would be discarded,even if he were seen in all others.By contrast,in our probabilistic framework,sufficient evidence might be present to detect him.Similarly,the presence of someone at a specific location creates an occlusion that hides the presence behind,which is not accounted for by the hull techniques but is by our approach.Since these marginal probabilities are computed indepen-dently at each time step,they say nothing about identity or correspondence with past frames.The appearance similarity is entirely conveyed by the color histograms,which has experimentally proved sufficient for our purposes.4C OMPUTATION OF THE T RAJECTORIESIn Section4.1,we break the global optimization of several people’s trajectories into the estimation of optimal individual trajectories.In Section 4.2,we show how this can be performed using the classical Viterbi’s algorithm based on dynamic programming.This requires a motion model given in Section 4.3and an appearance model described in Section4.4,which combines a color model given in Section4.5 and a sophisticated estimation of the ground plane occu-pancy detailed in Section5.We partition the visible area into a regular grid of G locations,as shown in Figs.5c and6,and from the camera calibration,we define for each camera c a family of rectangular shapes A c1;...;A c G,which correspond to crude human silhouettes of height175cm and width50cm located at every position on the grid.4.1Multiple TrajectoriesRecall that we denote by L n¼ðL n1;...;L n TÞthe trajectory of individual n.Given a batch of T temporal frames I¼ðI1;...;I TÞ,we want to maximize the posterior conditional probability:PðL1¼l1;...;L Nül NÃj IÞ¼PðL1¼l1j IÞY NÃn¼2P L n¼l n j I;L1¼l1;...;L nÀ1¼l nÀ1ÀÁ:ð2ÞSimultaneous optimization of all the L i s would beintractable.Instead,we optimize one trajectory after theother,which amounts to looking for^l1¼arg maxlPðL1¼l j IÞ;ð3Þ^l2¼arg maxlPðL2¼l j I;L1¼^l1Þ;ð4Þ...^l Nüarg maxlPðL Nül j I;L1¼^l1;L2¼^l2;...Þ:ð5ÞNote that under our model,conditioning one trajectory,given other ones,simply means that it will go through noalready occupied location.In other words,PðL n¼l j I;L1¼^l1;...;L nÀ1¼^l nÀ1Þ¼PðL n¼l j I;8k<n;8t;L n t¼^l k tÞ;ð6Þwhich is PðL n¼l j IÞwith a reduced set of the admissiblegrid locations.Such a procedure is recursively correct:If all trajectoriesestimated up to step n are correct,then the conditioning onlyimproves the estimate of the optimal remaining trajectories.This would suffice if the image data were informative enoughso that locations could be unambiguously associated toindividuals.In practice,this is obviously rarely the case.Therefore,this greedy approach to optimization has un-desired side effects.For example,due to partly missinglocalization information for a given trajectory,the algorithmmight mistakenly start following another person’s trajectory.This is especially likely to happen if the tracked individualsare located close to each other.To avoid this kind of failure,we process the images bybatches of T¼100and first extend the trajectories that havebeen found with high confidence,as defined below,in theprevious batches.We then process the lower confidenceones.As a result,a trajectory that was problematic in thepast and is likely to be problematic in the current batch willbe optimized last and,thus,prevented from“stealing”somebody else’s location.Furthermore,this approachincreases the spatial constraints on such a trajectory whenwe finally get around to estimating it.We use as a confidence score the concordance of theestimated trajectories in the previous batches and thelocalization cue provided by the estimation of the probabil-istic occupancy map(POM)described in Section5.Moreprecisely,the score is the number of time frames where theestimated trajectory passes through a local maximum of theestimated probability of occupancy.When the POM does notdetect a person on a few frames,the score will naturallydecrease,indicating a deterioration of the localizationinformation.Since there is a high degree of overlappingbetween successive batches,the challenging segment of atrajectory,which is due to the failure of the backgroundsubtraction or change in illumination,for instance,is met inseveral batches before it actually happens during the10keptframes.Thus,the heuristic would have ranked the corre-sponding individual in the last ones to be processed whensuch problem occurs.FLEURET ET AL.:MULTICAMERA PEOPLE TRACKING WITH A PROBABILISTIC OCCUPANCY MAP2714.2Single TrajectoryLet us now consider only the trajectory L n ¼ðL n 1;...;L nT Þof individual n over T temporal frames.We are looking for thevalues ðl n 1;...;l nT Þin the subset of free locations of f 1;...;G;Hg .The initial location l n 1is either a known visible location if the individual is visible in the first frame of the batch or H if he is not.We therefore seek to maximizeP ðL n 1¼l n 1;...;L n T ¼l nt j I 1;...;I T Þ¼P ðI 1;L n 1¼l n 1;...;I T ;L n T ¼l nT ÞP ðI 1;...;I T Þ:ð7ÞSince the denominator is constant with respect to l n ,we simply maximize the numerator,that is,the probability of both the trajectories and the images.Let us introduce the maximum of the probability of both the observations and the trajectory ending up at location k at time t :Èt ðk Þ¼max l n 1;...;l nt À1P ðI 1;L n 1¼l n 1;...;I t ;L nt ¼k Þ:ð8ÞWe model jointly the processes L n t and I t with a hidden Markov model,that isP ðL n t þ1j L n t ;L n t À1;...Þ¼P ðL n t þ1j L nt Þð9ÞandP ðI t ;I t À1;...j L n t ;L nt À1;...Þ¼YtP ðI t j L n t Þ:ð10ÞUnder such a model,we have the classical recursive expressionÈt ðk Þ¼P ðI t j L n t ¼k Þ|fflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflffl}Appearance modelmax P ðL n t ¼k j L nt À1¼ Þ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}Motion modelÈt À1ð Þð11Þto perform a global search with dynamic programming,which yields the classic Viterbi algorithm.This is straight-forward,since the L n t s are in a finite set of cardinality G þ1.4.3Motion ModelWe chose a very simple and unconstrained motion model:P ðL n t ¼k j L nt À1¼ Þ¼1=Z Áe À k k À k if k k À k c 0otherwise ;&ð12Þwhere the constant tunes the average human walkingspeed,and c limits the maximum allowable speed.This probability is isotropic,decreases with the distance from location k ,and is zero for k k À k greater than a constantmaximum distance.We use a very loose maximum distance cof one square of the grid per frame,which corresponds to a speed of almost 12mph.We also define explicitly the probabilities of transitions to the parts of the scene that are connected to the hidden location H .This is a single door in the indoor sequences and all the contours of the visible area in the outdoor sequences in Fig.1.Thus,entrance and departure of individuals are taken care of naturally by the estimation of the maximum a posteriori trajectories.If there are enough evidence from the images that somebody enters or leaves the room,then this procedure will estimate that the optimal trajectory does so,and a person will be added to or removed from the visible area.4.4Appearance ModelFrom the input images I t ,we use background subtraction to produce binary masks B t such as those in Fig.4.We denote as T t the colors of the pixels inside the blobs and treat the rest of the images as background,which is ignored.Let X tk be a Boolean random variable standing for the presence of an individual at location k of the grid at time t .In Appendix B,we show thatP ðI t j L n t ¼k Þzfflfflfflfflfflfflfflfflffl}|fflfflfflfflfflfflfflfflffl{Appearance model/P ðL n t ¼k j X kt ¼1;T t Þ|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}Color modelP ðX kt ¼1j B t Þ|fflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflffl}Ground plane occupancy:ð13ÞThe ground plane occupancy term will be discussed in Section 5,and the color model term is computed as follows.4.5Color ModelWe assume that if someone is present at a certain location k ,then his presence influences the color of the pixels located at the intersection of the moving blobs and the rectangle A c k corresponding to the location k .We model that dependency as if the pixels were independent and identically distributed and followed a density in the red,green,and blue (RGB)space associated to the individual.This is far simpler than the color models used in either [18]or [13],which split the body area in several subparts with dedicated color distributions,but has proved sufficient in practice.If an individual n was present in the frames preceding the current batch,then we have an estimation for any camera c of his color distribution c n ,since we have previously collected the pixels in all frames at the locations272IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,VOL.30,NO.2,FEBRUARY2008Fig.4.The color model relies on a stochastic modeling of the color of the pixels T c t ðk Þsampled in the intersection of the binary image B c t produced bythe background subtraction and the rectangle A ck corresponding to the location k .。
英语精读课文加翻译

第一单元1 The idea of being a writer had e to me off and on since my childhood in Belleville, but it wasn't until my third year in high school that the possibility took hold. Until then I've been bored by everything associated with English courses. I found English grammar dull and difficult. I hated the assignments to turn out long, lifeless paragraphs that were agony for teachers to read and for me to write.从孩提时代,我还住在贝尔维尔时,我的脑子里就断断续续地转着当作家的念头,但直等到我高中三年级,这一想法才有了实现的可能。
在这之前,我对所有跟英文课沾边的事都感到腻味。
我觉得英文语法枯燥难懂。
我痛恨那些长而乏味的段落写作,教师读着受累,我写着痛苦。
2 When our class was assigned to Mr. Fleagle for third-year English I anticipated another cheerless year in that most tedious of subjects. Mr. Fleagle had a reputation among students for dullness and inability to inspire. He was said to be very formal, rigid and hopelessly out of date.To me he looked to be si*ty or seventy and e*cessively prim.He wore primly severe eyeglasses,his wavy hair was primly cut and primly bed. He wore prim suits with neckties set primly against the collar buttons of his white shirts. He had a primly pointed jaw, a primly straight nose, and a prim manner of speaking that was so correct, so gentlemanly, that he seemed a ic antique.弗利格尔先生接我们的高三英文课时,我就准备着在这门最最单调乏味的课上再熬上沉闷的一年。
供应链设计与管理(第三版)期末考试重点---供应链知识理念-英文版本

Chapter1.Iroduction to Supply Chain Management1.【supply chain】The system of suppliers,manufacturers, transportation,distributors,and vendorsthat exists to transform raw materials to final products and supply those products to customers。
2.【supply chain management】SCM is a business network covering from buying,making,moving,warehousing to selling。
3.【What makes supply chain management difficult?】①Supply chain strategies cannot be determined in isolation。
They are directly affected by another chainthat most organizations have, the development chain.②It is challenging to design and operate a supply chain so that total systemwide costs are minimized,and systemwide service levels are maintained。
③Uncertainty and risk are inherent in every supply chain。
4.【Strategies for SCM】①Global Optimization(全局优化)②Managing Uncertainty(管理不确定性)5.【Why is Global Optimization Hard?】①The supply chain is a complex network.②Different facilities in the supply chain frequently have different, conflicting objectives.③The supply chain is a dynamic system。
Kinematic-based method of estimating the absolute

专利名称:Kinematic-based method of estimating theabsolute roll angle of a vehicle body发明人:Hac, Aleksander B.,Nichols, DavidJ.,Sygnarowicz, Daniel申请号:EP09160540.2申请日:20090518公开号:EP2127988A1公开日:20091202专利内容由知识产权出版社提供专利附图:摘要:The absolute roll angle of a vehicle body (16) is estimated by blending two preliminary roll angle estimates based on their frequency (48) so that the blendedestimate continuously favors the more accurate of the preliminary roll angle estimates. A first preliminary roll angle estimate based on the measured roll rate (22) is improved by initially compensating the roll rate signal for bias error using roll rate estimates inferred from other measured parameters (44). And a second preliminary roll angle estimate is determined based on the kinematic relationship among roll angle, lateral acceleration, yaw rate and vehicle speed (46). The blended estimate of roll angle utilizes a blending coefficient that varies with the frequency of the preliminary roll angle signals, and a blending factor used in the blending coefficient is set to different values depending whether the vehicle (10) is in a steady-state or transient condition (48).申请人:Delphi Technologies, Inc.地址:P.O. Box 5052 Troy, Michigan 48007 US国籍:US代理机构:Denton, Michael John更多信息请下载全文后查看。
公司理财(罗斯)第1章(英文
03 Valuation Basis
The concept and significance of valuation
要点一
Definition
Valuation is the process of estimating the worth of an asset or a company, typically through the use of financial metrics and analysis.
The Time Value of Money
特征点筛选法
特征点筛选法Feature point selection is a critical step in computer vision and image processing. It involves identifying and selecting distinct points or keypoints in an image that can be used for various purposes such as object recognition, image matching, and 3D reconstruction. The process of feature point selection is essential for reducing the computational load and improving the performance of algorithms in computer vision tasks.特征点选择在计算机视觉和图像处理中是一个关键步骤。
它涉及在图像中识别和选择可用于各种目的的不同点或关键点,例如对象识别、图像匹配和3D重建。
特征点选择的过程对于减少计算负载和改进计算机视觉任务中的算法性能至关重要。
One of the most commonly used methods for feature point selection is the Harris corner detector, which aims to detect corners or interest points in an image by identifying significant changes in intensity. Another popular approach is the Shi-Tomasi corner detector, which is an improvement over the Harris corner detector and provides a more accurate selection of feature points. These methods are widelyused in various computer vision applications and have been extensively studied and refined over the years.最常用的特征点选择方法之一是哈里斯角点检测器,其目的是通过识别图像中的边缘或兴趣点来检测角点。
车牌识别英文文献1翻译
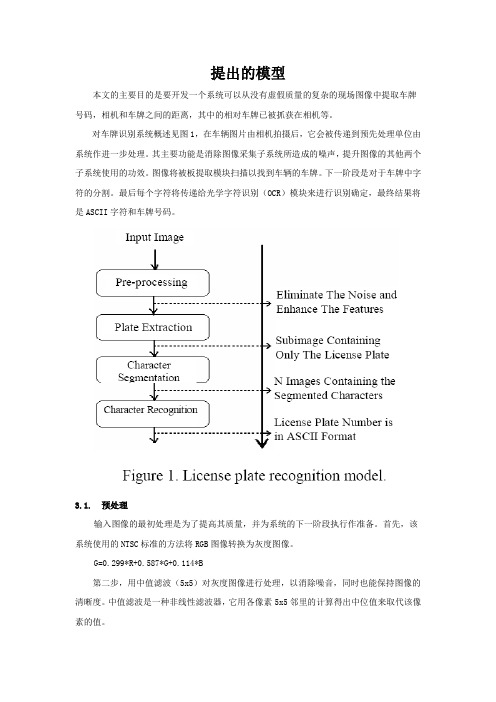
提出的模型本文的主要目的是要开发一个系统可以从没有虚假质量的复杂的现场图像中提取车牌号码,相机和车牌之间的距离,其中的相对车牌已被抓获在相机等。
对车牌识别系统概述见图1,在车辆图片由相机拍摄后,它会被传递到预先处理单位由系统作进一步处理。
其主要功能是消除图像采集子系统所造成的噪声,提升图像的其他两个子系统使用的功效。
图像将被板提取模块扫描以找到车辆的车牌。
下一阶段是对于车牌中字符的分割。
最后每个字符将传递给光学字符识别(OCR)模块来进行识别确定,最终结果将是ASCII字符和车牌号码。
3.1.预处理输入图像的最初处理是为了提高其质量,并为系统的下一阶段执行作准备。
首先,该系统使用的NTSC标准的方法将RGB图像转换为灰度图像。
G=0.299*R+0.587*G+0.114*B第二步,用中值滤波(5x5)对灰度图像进行处理,以消除噪音,同时也能保持图像的清晰度。
中值滤波是一种非线性滤波器,它用各像素5x5邻里的计算得出中位值来取代该像素的值。
3.2.板块提取板块提取处理包含五个不同的阶段进行,如图2所示;在这里每个阶段执行灰度图像分割过程以消除不属于车牌区域的多余的像素。
例如,水平定位阶段是负责寻找水平部分可能包含一个车牌。
在下面的讨论中,每一个阶段都会被细细展开讨论。
马来西亚车牌由一排白色字符在黑色的背景底色,所以我们可以说,车牌区域的特点是从一排黑色过渡到一排白色,反之亦然,这样转换被称为“边缘”。
从车牌字符到其背景在色彩强度上总的变化叫做边缘的强度。
最强边缘值,能够在从一个黑色像素过渡到一个白色像素或从白色像素变为黑色像素情况下被找到。
在理想的情况下,马来西亚的车牌是白色的字符绘制在黑色的背景上,因此这种搭配产生了高强度边缘值,用于查找出可能的板区域。
在本文中我们将使用Sobel算子来查找边缘。
Sobel运算在图片上执行一个2-D空间梯度测量。
通常它是用来寻找近似绝对的梯度幅度对在每一个点在输入的灰度图像上。
卡尔曼滤波的英文形式
卡尔曼滤波的英文形式Kalman Filter.The Kalman filter is a mathematical algorithm that estimates the state of a dynamic system from a series of measurements. It is named after Rudolf Kalman, who developed it in the 1960s. The Kalman filter is used in a wide variety of applications, including tracking, navigation, and control.How the Kalman Filter Works.The Kalman filter is a recursive algorithm that consists of two steps:1. Prediction: In the prediction step, the filter estimates the state of the system at the current time step based on the state at the previous time step and the system dynamics.2. Update: In the update step, the filter updates the estimate of the state based on the new measurement.The Kalman filter is a powerful tool for estimating the state of a dynamic system. However, it is important to note that the filter is only as good as the model of the system that is used. If the model is not accurate, then the filter will not be able to provide accurate estimates.Applications of the Kalman Filter.The Kalman filter is used in a wide variety of applications, including:Tracking: The Kalman filter can be used to track the position and velocity of a moving object. This is usefulfor applications such as tracking satellites, aircraft, and missiles.Navigation: The Kalman filter can be used to navigate a vehicle by combining measurements from a variety of sensors, such as GPS, accelerometers, and gyroscopes.Control: The Kalman filter can be used to control a system by estimating the state of the system and then using that estimate to calculate the appropriate control inputs. This is useful for applications such as controlling robots and self-driving cars.Advantages of the Kalman Filter.The Kalman filter has several advantages over other estimation methods, including:Optimality: The Kalman filter is the optimal estimator for a linear system with Gaussian noise. This means that the filter will provide the most accurate estimates possible given the available measurements.Recursion: The Kalman filter is a recursive algorithm, which means that it can be implemented in real time. Thisis important for applications where it is necessary to estimate the state of a system in a timely manner.Robustness: The Kalman filter is robust to noise and outliers. This means that the filter can still provide accurate estimates even when the measurements are noisy or contain outliers.Disadvantages of the Kalman Filter.The Kalman filter also has some disadvantages, including:Computational complexity: The Kalman filter can be computationally complex, especially for large systems. This can be a problem for applications where real-time estimation is required.Sensitivity to model errors: The Kalman filter is sensitive to errors in the model of the system. This means that the filter can provide inaccurate estimates if the model is not accurate.Initialization: The Kalman filter requires an initial estimate of the state of the system. This estimate can bedifficult to obtain, especially for complex systems.Conclusion.The Kalman filter is a powerful tool for estimating the state of a dynamic system. The filter is optimal for linear systems with Gaussian noise and is recursive, robust, and computationally efficient. However, the filter is also sensitive to model errors and requires an initial estimate of the state of the system.。
英语会计试题及答案
英语会计试题及答案一、选择题(每题2分,共20分)1. What is the basic accounting equation?A. Assets = Liabilities + EquityB. Assets = Liabilities - EquityC. Assets + Equity = LiabilitiesD. Liabilities = Assets - Equity答案:A2. Which of the following is not an accounting principle?A. Going concernB. ConsistencyC. MaterialityD. Fair value答案:D3. What does the term "depreciation" refer to?A. The increase in the value of an asset over timeB. The allocation of the cost of a tangible asset over its useful lifeC. The decrease in the value of an asset due to obsolescenceD. The process of selling assets to pay off debts答案:B4. Which of the following is a non-current asset?A. CashB. InventoryC. LandD. Accounts payable答案:C5. What is the purpose of adjusting entries?A. To correct errors in the booksB. To update the financial statements to reflect the current financial positionC. To prepare for the next accounting periodD. To comply with tax regulations答案:B6. What is the accounting treatment for revenue recognition?A. Recognize revenue when cash is receivedB. Recognize revenue when the service is providedC. Recognize revenue when the service is earned and the amount is measurableD. Recognize revenue when the product is delivered答案:C7. Which of the following is a liability?A. Common stockB. Retained earningsC. Accounts payableD. Dividends答案:C8. What is the accounting term for the process of estimating the cost of completing a project?A. Job costingB. Activity-based costingC. Standard costingD. Variable costing答案:A9. What does the term "accrual basis accounting" mean?A. Revenues and expenses are recognized when cash is received or paidB. Revenues are recognized when earned, and expenses are recognized when incurredC. All transactions are recorded in the period in which they occurD. Only cash transactions are recorded答案:B10. Which of the following is an example of a contingent liability?A. Accounts payableB. Unearned revenueC. A lawsuit that may result in a lossD. A long-term loan答案:C二、简答题(每题5分,共30分)1. Explain the difference between a debit and a credit in accounting.答案:In accounting, a debit is an entry that increases an asset or an expense and decreases a liability or equity. Conversely, a credit is an entry that increases a liabilityor equity and decreases an asset or an expense.2. What are the main components of a balance sheet?答案:The main components of a balance sheet are assets, liabilities, and equity. Assets represent what a company owns, liabilities represent what a company owes, and equity represents the ownership interest in the company.3. Describe the accounting cycle.答案:The accounting cycle is a series of stepsaccountants follow to prepare financial statements. Itincludes journalizing transactions, posting to the ledger, adjusting entries, preparing an adjusted trial balance,closing entries, and preparing financial statements.4. What is the purpose of closing entries?答案:The purpose of closing entries is to transfer the balances of temporary accounts to the appropriate permanent accounts, such as retained earnings, at the end of an accounting period. This process helps to reset the temporaryaccounts for the next accounting period.5. Explain the concept of matching principle in accounting.答案:The matching principle in accounting states that revenues should be recognized in the same period as the expenses incurred to generate those revenues. This ensures that the financial statements accurately reflect the company's performance over the period.6. What are the two main types of financial statements?答案:The two main types of financial statements are the balance sheet, which presents a company's financial position at a specific point in time, and the income statement, which shows the company's financial performance over a period of time.三、计算题(每题15分,共30分)1. A company has the following trial balance figures: Cash $10,000, Accounts Receivable $5,000, Supplies $2,000, Equipment $15,000, Accounts Payable $4,000, Common Stock $10,000, Retained Earnings $6,000, Dividends $2,000, Sales Revenue $20,000, Cost。
金融专业英语证书考试FECT模拟试题-7
金融专业英语证书考试FECT模拟试题-7(总分100, 考试时间90分钟)SECTION ONE (Compulsory):Answer all ten questions in this section. Each question carries 1 mark.1. Multiple-choice questions: from the following four options, select a correct and fill in its labeling the brackets.1.Assume U.S. GAAP (generally accepted accounting principles) applies unless otherwise noted. Which of the following is least likely to be classified as a financial statement element? ()A AssetB RevenueC LiabilityD Net income该题您未回答:х该问题分值: 2答案:D2.Amy, a CFA candidate, recently joined A&F Asset Management, and reports directly to Tammy. Shortly after joining the firm, Amy learned that A&F Asset Management does not have a copy of the Code and Standards. Which of the following statements best complies with AIMR Standards of Professional Conduct? ()A Amy must deliver a copy of the Code and Standards to Tammy.B Amy must notify Tammy, in writing, of her obligation to comply with the Code and Standards.C Statement A and B.D None of the above.该题您未回答:х该问题分值: 2答案:C3.Compared with an otherwise identical amortizing security, a zero-coupon bond will most likely have: ()A Less interest rate risk and more reinvestment risk.B Less reinvestment risk and more interest rate risk.C The same reinvestment risk and less interest rate risk.D The same interest rate risk and more reinvestment risk.该题您未回答:х该问题分值: 2答案:B4.A futures trader goes long one futures contract at $450. Thesettlement price 1 day before expiration is $500. On expiration day, the future is trading at $505. The least likely way the futurestrader will lock in her profits on expiration is: ()A Take delivery of the underlying asset and pay $500 to the short.B Close out the futures position by selling the futures contractat $505.C Take delivery of the underlying asset and pay the expiration settlement price to the short.D Cash settle the futures and receive the difference between $500and the expiration settlement price.该题您未回答:х该问题分值: 2答案:C5.Assume U.S. GAAP (generally accepted accounting principles) applies unless otherwise noted. Bishop Ltd. received an advanced payment of $10,000 on December 1, for rent on a property for December and January. On receipt they correctly recorded it as cash and unearned revenue. If at December 31, their year-end, they failed to make an adjusting entry related to this payment, ignoring taxes, what would the effect on the financial statements for the year be? ()A Assets are overstated by $5,000 and Liabilities are overstated by $5,000.B Liabilities are overstated by $5,000 and Net income is overstated by $5,000.C Assets are overstated by $5,000 and Owner’s equity is overstated by $5,000.D L iabilities are overstated by $5,000 and Owners’ equity isunderstated by $5,000.该题您未回答:х该问题分值: 2答案:B6.A market participant has a view regarding the potential movement of a stock. He sells a customized over-the-counter put option on the stock when the stock is trading at $38. The put has an exercise price of $36 and the put seller receives $2.25 in premium. The price of the stock is $35 at expiration. The profit or loss for the put seller at expiration is: ()A $1.25.B $1.00.C $1.25D $2.25.该题您未回答:х该问题分值: 2答案:C7.As part of an AIMR investigation into the conduct of Helen, CFA, AIMR requests records from Helen about her investment accounts. Helen writes AIMR a letter stating that under Standard IV (B.5), Preservation of Confidentiality that she is unable to comply with their request. Which of the following statement is TRUE? ()A Is correct in her interpretation of Standard IV (B.5).B Should not turn over the information because it will violatefederal material nonpublic information statutes and AIMR’s Standard V (A) Prohibit against Use of Material Nonpublic information.C Will no be in violation of Standard IV (B.5) by turning overthe requested information because under the Professional Conduct Program, the Disciplinary Review Subcommittee is considered an extension of Helen.D All of the above.该题您未回答:х该问题分值: 2答案:C8.Which of the following is the least accurate statement about the short sale of stocks? ()A The short seller must pay any dividends due to the lender of shares.B A stop buy order would enable a short seller to minimize potential losses.C Short sales involve time limits for returning the sharesborrowed to the lender.D A short sale can be made only on an uptick or a zero upticktrade if the previous trade was an uptick trade.该题您未回答:х该问题分值: 2答案:C9.The appropriate measures of free cash flow and discount rate to use when estimating the total value of a firm, respectively, are: ()A Answer A.B Answer B.C Answer C.D Answer D.该题您未回答:х该问题分值: 2答案:D10.Assume U.S. GAAP (generally accepted accounting principles) applies unless otherwise noted. An analyst gathered the following information from a company’s accounting records:The analyst’s estimate of net income for 2007 would be closest to: ()A $650,000.B $850,000.C $1,050,000.D $1,850,000.该题您未回答:х该问题分值: 2答案:CSECTION TWO(Compulsory):Answer the questions in this section.Reading ComprehensionKammel Capital Management is an institutional money manager that oversees over $12 billion in client assets. Most of its assets under management are invested in the Kammel Funds, a family of 12 mutual funds encompassing 9 growth and value equity funds, and 3 fixed income funds.Linda Karazim is an analyst for the Kammel Strategic Income Fund, a flexible fixed-income fund benchmarked to the Lehman BrothersAggregate Index. The fund owns a substantial portion of subordinated debentures that were issued by Gernot Incorporated to finance the acquisition of a major competitor in 2002. Karazim has been assigned by the Strategic Income Senior Portfolio Manager, Mark Davidson, to analyze the subordinated debt of Gernot, Inc.Karazim decides that the best way to assess the credit quality of the Gernot’s bonds is to analyze the firm’s financial statements and calculate ratios that will identify trends in the firm’s operations and financing decisions. Karazim searches online and pulls up Gernot’s financial statements for the last three years. The statements Karazim uses for her analysis are shown below:As Karazim is working on her project, Jacob Cannon, an analyst for Kammel’s Large Cap Growth Fund, stops by Karazim’s office to chat. When Karazim tells him that she is working on a ratio analysisproject to assess Gernot Inc.’s subordinated debt, Cannon tells her that Kammel’s growth equity team is potentially looking to purchase Gernot’s stock for their fund. Karazim tells Cannon that the return on assets ratio that she has calculated for evaluating Gernot’s debt rating would also be considered one of the most effective ratios for use in valuing Gernot’s stock. Cannon replies that he has been doing his ow n ratio analysis to assess Gernot’s systematic risk and one of the most useful ratios for identifying relationships between accounting variables and beta is the current ratio, which would also be useful in forecasting the possibility of Gernot, Inc. going bankrupt.After Karazim completes her analysis, she has a meeting with Davidson to discuss her findings. At the meeting, Karazim tells Davidson that Gernot’s Inc.’s sustainable growth rate based on 2004 data is 9 percent, and that a growing company has a much lower chance of defaulting on its debt. Davidson, always critical of the work of the analysts that work for him, concludes the meeting by telling Karazim that she did good work, but one of the major limitations of the cross-sectional analysis she has performed is that comparisons are made difficult due to different accounting treatments.11.What are Gernot’s total asset turnover for 2004 and the change in the ratio from 2002 to 2004? ()2004 Ratio Change in RatioA 2. 08 decline of 0.18B 1 .52 decline of 0.56C 2.08 increase of 0.18D 1.52 increase of 0.56该题您未回答:х该问题分值: 2答案:BThe total asset turnover ratio = sales/assets. In 2002, the ratio was (10,424/5,012) = 2.08. In 2004, the ratio was (11,606/7,636) = 1.52. From 2002 to 2004 the ratio declined by (2.08 – 1.52) = 0.56.12.What is the change in Gernot Inc.’s cash conversion cycle from 2003 to 2004? The cash conversion cycle has: ()A Increased by 17 days.B Increased by 33 days.C Increased by 25 days.D Decreased by 13 days.该题您未回答:х该问题分值: 2答案:CThe cash conversion cycle = (average receivables collection period) + (average inventory processing period) – (payables payment period).For 2003: Receivables turnover = (sales/average receivables) = 11,718/((625+798)/2) = 11,718/712 = 16.46 Average receivables collection period = (365/receivables turnover) = 365/16.46 = 22.17days Inventory turnover = (COGS/average inventory) =7183/((1342+937)/2) = 7183/1140 = 6.3 Average inventory processing period = (365/inventory turnover) = 365/6.3 = 57.94 days. Payables turnover = (COGS/average payables) = 7183/((620 + 544)/2) = 7183/582 = 12.34 Payables payment period = (365/12.34) = 29.58 days 2003 cash conversion cycle = 22.17 + 57.94 – 29.58 = 50.53 days. For 2004: Receivables turnover = (sales/average receivables) =11,606/((1294+798)/2) = 11,606/1046 = 11.10 Average receivables collection period = (365/receivables turnover) = 365/11.10 = 32.88 days Inventory turnover = (COGS/average inventory) =7150/((1342+1552)/2) = 7150/1447 = 4.94 Average inventory processing period = (365/inventory turnover) = 365/4.94 = 73.89 days. Payables turnover = (COGS/average payables) = 7150/((620 + 597)/2) = 7150/609 = 11.74 Payables payment period = (365/11.74) = 31.09 days 2004 cash conversion cycle = 32.88 + 73.89 – 31.09 = 75.68 days. From 2003 to 2004, the cash conversion cycle increased by (75.68-50.53) = 25.15 days.13.Karazim has noted in her analysis that Gernot Inc.’s return on equity has fallen significantly from 2002 to 2004. Using the extended DuPont system, which of the following components had the most impact on Gernot’s ROE decline? ()A Financial leverage multiplier.B Operating profit margin.C Interest coverage ratio.D Tax retention rate.该题您未回答:х该问题分值: 2答案:DFrom 2002 to 2004, ROE declined from (328/1575) = 20.8% to (304/2292) = 13.3%.The extended DuPont formula states that ROE = [(operating profit margin)(total asset turnover) – (interest expense rate)](financial leverage multiplier)(tax retention rate)For 2002:Operating profit margin = (EBIT/sales) = (513 + 147)/10,424 = 0.0633 = 6.33%.Total Asset Turnover = (sales/assets) = 10424/5012 = 2.08xInterest Expense rate = (interest expense/assets) = 147/5012 = 2.93%Financial leverage multiplier = (assets/equity) = 5012/1575 = 3.18Tax retention rate = (1-tax rate) = 1 – (185/513) = 1 – 0.36 = 64%.For 2004:Operating profit margin = (EBIT/sales) = (516 + 340)/11,606 = 0.0738 = 7.38%.Total Asset Turnover = (sales/assets) = 11,606/7,636 = 1.52xInterest Expense rate = (interest expense/assets) = 340/7,636 = 4.45%Financial leverage multiplier = (assets/equity) = 7,636/2,292 = 3.33Tax retention rate = (1-tax rate) = 1 – (212/516) = 1 – 0.41 = 59%.Since the operating profit margin and the financial leverage multiplier both increased, these did not have an adverse impact on the ROE. The interest coverage ratio is not part of the DuPont formula. The only viable answer is the tax retention rate, which, in fact did decline significantly.14.Regarding Karazim’s conversation with Cannon regarding the most useful ratios for various tasks: ()A Karazim’s statement is incorrect; Cannon’s statement is incorrect.B Karazim’s statement is incorrect; Cannon’s statement iscorrect.C Karazim’s statement is correct; Cannon’s statement is correct.D Karazim’s statement is correct; Cannon’s statement isincorrect.该题您未回答:х该问题分值: 2答案:BAlthough return on assets is one of the ratios that bond agenciesrely on heavily for deriving their debt ratings, it is not one of the ratios that is deemed most useful for stock valuation, therefore Karazim’s statement is incor rect. Return on equity, (not ROA), is a ratio that is deemed to be very effective for both stock valuation and determining credit ratings.Cannon’s statement is correct – the current ratio is considered to be one of the most effective ratios for both determining systematic risk (beta) based on accounting variables and for forecasting bankruptcy.15.Karazim decides to enhance her analysis by creating common size statements for Gernot, Inc. Which of the following statements is CORRECT? A common size balance sheet expresses all balance sheet accounts as a percent of: ()A Total assets and a common size income statement expressallitems as a percentage of net income.B Sales and a common size income statement expressall items as a percentage of net income.C Sales and a common size income statement expressall items as a percentage of total assets.D Total assets and a common size income statement expressallitems as a percentage of sales.该题您未回答:х该问题分值: 2答案:DCommon size statements normalize balance sheet items by expressing each item as a percentage of total assets, and normalize income statements by expressing each item as a percentage of sales. Using common size statements allows the analyst to make easier comparisons of different sized firms.Explanations of terms:(10 points)1. Legal tender:The status of legal tender simply means that coins and paper currency cannot lawfully be refused in payment for goods and services and in discharge of debts.2. Double-entry bookkeeping:Bookkeeper debits the transaction to one account and credits it to another bill of exchange: A non-interest-bearing written order used primarily in international trade that binds one party to pay a fixed sum of money to another party ata predetermined future date.3. Arbitrage pricing theory:An equilibrium model of assetpricing that states that the expected return on a security is alinear function of the security’s sensitivity to various common factors.4. Soft law:Quasi-legal instruments which do not have anylegally binding force, or whose binding force is somewhat "weaker" than the binding force of traditional law, often contrasted to soft law by being referred to as "hard law".5. Gold markets:According to its nature and the influence on the entire world gold transaction, gold market may be divided into leading market and regional market. According to the difference of transaction type and the transaction way, gold market may be divided into spot transaction and future transaction.Following international experiences, gold market participants include; gold enterprises, banks, hedge funds, organizations and personal investors, broker companies and the exchanges.Factors that Affect Gold Market are the quantity change of structure of supply and demand, economic factors and political situation and unexpected significant events.There are many different ways to invest in gold, such as gold futures, gold exploration companies, blue-chip gold mining stocks, gold mutual funds, gold bars, gold bullion and gold coins. Explanations of terms:16.Legal tender该题您未回答:х该问题分值: 617.Double-entry bookkeeping该题您未回答:х该问题分值: 618.Arbitrage pricing theory该题您未回答:х该问题分值: 619.Soft law该题您未回答:х该问题分值: 620.Gold markets该题您未回答:х该问题分值: 6Question and Answer21.What is the Theory of Money Supply by the Monetarist School?该题您未回答:х该问题分值: 10答案:Friedman held that money demand is relatively stable and money supply must be guaranteed stable, too, if there should be equilibrium between money demand and money supply. So Friedman opposed the management of the aggregate demand raised by Keynes and focused on the importance of money supply.According to the Monetarist School, the core of economic policies is placed on monetary policy, which should be the only important wander-working among all economic policies. Without monetary policy, other economic policies can’t achieve their anticipated effect.Friedman assumed that the best choice in controlling money supply was the "single rule" of monetary policy, i. e. , making it known to the public to adapt a fixed increasing rate of money supply, excluded other factors, such as interest rates, credit flow, excess reserves on a voluntary basis, and so on. So monetary policy should just take a certain money stock as the only decisive factor. In order to carry out the "single rule”, three problems should be solved; the first is how to define the scope of the aggregate money supply; the second is how to decide the increasing rate of money supply and the third is whether or not fluctuation of the increasing rate of money supply is allowed during a certain period, a year or a season. The solution to the above problems is as follows; firstly, M2 should be the scope of the aggregate money supply; secondly, the increasing rate of money supply should be suited to economic growth rate and thirdly, it couldn’t be changed at will when the increasing rate of money supply had been decided. If there is need for change of the increasing rate of money supply, it should be announced and the band of fluctuation should be as small as possible.22.Explain the Open Market Operations.该题您未回答:х该问题分值: 10答案:The most widely used instrument of monetary policy is open market operations. Open market operations involve the purchase of securities by a central bank to put additional reserves at the disposal of the banking system or the sale of securities to reduce reserves so that money supply can be altered. Open market operations are the bread-and-butter instrument of Federal Reserve policy in U. S.Because the central bank earns interest income from itssecurities portfolio, the total revenues earned by the central bank vary in direct proportion to the magnitude of its portfolio. However, this consideration plays no role in the central bank’s decision to acquire or sell securities. Indeed, if it did, the central bank could not perform the chief function of a central bank—conducting monetary policy in a way that contributes to the stability of aggregate expenditures and economic activity.Suppose the U. S. economy is encountering excessive aggregate demand and escalating inflation. The central bank is therefore intent on implementing a policy of monetary restraint. In that event, the central bank would sell securities on the open market. Assume that the central bank sells $225 million in U. S. Treasury bills to a government securities dealer, receiving payment via a check written against the dealer’s bank checking account. When the central bank receives the check, it "collects" by debiting the reserve account of (making a bookkeeping entry against) the dealer’s commercial bank and returns the check to that bank. Upon receipt of the check, the commercial bank debits the dealer’s demand deposit account. The relevant balance sheets exhibit the following changes.23.(1) State the difference between a documentary credit and a documentary collection.(2) Why is a documentary credit arrangement important to an exporter?(3) What is the difference between a revocable credit and an irrevocable credit?该题您未回答:х该问题分值: 10答案:(1) A documentary credit is a written undertaking by a banker who is the agent fro the importer or the buyer. The function of a documentary collection is to provide both importer (buyer) and exporter (seller) with a compromise to settle their tradetransactions between payment in advance and on open account terms.The parties involved in a documentary credit arrangement include issuing banker, advising banker, the applicant and the beneficiary. Parties involved in a documentary collection include the drawer (exporter or seller), the remitting bank, the collecting bank and the drawee (importer or buyer). .Their processes are different.(2) In accordance with the instructions of the importer, the bank undertakes to pay the exporter, up to a limit, within a designated time period and against any stipulated terms and documents.The credit created for international settlement among banks not only provides a sense of security for the traders involved , but alsoa reliable source of finance for foreign trade where required .(3) A "revocable credit" may be cancelled at any time up to the moment the advising bank pays. This type of credit is the least favorable to the exporter.An irrevocable credit may not be amended or even cancelledwithout the consent of all the parties involved. This type of credit guarantees payment to the beneficiary, provided that the credit terms and conditions are met.24.What are the Countering Financial Abuse and Crime? What Others Are Doing?该题您未回答:х该问题分值: 10答案:(1) Since the late 1980s, the growing concerns about drug trafficking and the uses made of globalization facilitated by the advancements in communication technology have led to direct and indirect approachesby different international institutions and the international community to combat financial crime and money laundering.(2) The FATF and affiliated regional organizations lead the international efforts in directly combating money laundering. Members of the FATF engage in annual self-assessments and in periodic mutual evaluations of members’ anti-money laundering efforts. In June 2000, the FATF identified 15 non-member jurisdictions that it considers as "non-cooperative with international efforts against money laundering". Since the FATF is a voluntary task force and not a treaty organization, its recommendations do not constitute a binding international convention.Fund staff has participated, as observers, in most FATF plenaries since 1980. At the request of the FATF, Fund staff made a statementat the Junel996 FATF Plenary on the macroeconomic impact of money laundering, and the Managing Director made a statement at theFebruary 1998 FATF plenary. The FATF has recently agreed to share results from their exercises with Fund staff conducting financial assessments, in the context of FSAP and OFC assessments. At a recent IMF Executive Board meeting, the possibility was raised that the FATF could be invited to prepare ROSC modu les on Fund members’ observance of the FATFs Forty Recommendations. Some members of the FATF have asked that the Fund’s Article IV"? Surveillance and program conditionally include anti-money laundering considerations. The FATF President, in a letter to Fund management, suggested that the FATF Forty Recommendations be adopted as the anti-money laundering standard.(3) Other direct efforts to counter financial crime are undertaken mainly by the International Criminal Police Organization (Interpol) and national financial intelligence units (FIUs). The United Nations takes part in the direct efforts through the United Nation’s Office for Drug Control and Crime Prevention Global Program against Money Laundering (UNDCCP), which monitors weaknesses in global financial systems and assists countries in criminal investigations.Recently, the international community’s awareness of financial system abuse has been heightened by the work of the FSF. In May 2000, the FSF classified 42 OFCs into three groupings, and called on the Fund to take the lead in assessing OFCs adherence to internationally accepted standards and codes.(4) Indirect efforts to counter financial system abuse focus on the preconditions for the proper functioning of financial systems and the formulation and enforcement of relevant laws. These efforts encompass general standards for the supervision and regulation of banks, securities markets, and insurance, as incorporated in the standards developed by the Basel Committee, the IOSCO, and the IAIS. The substance of relevant FATF recommendations is incorporated in the principles of supervision of the Basel Committee and other international supervisory standard-setters.(5) Banking, insurance, and securities markets supervisors are involved in both indirect and direct efforts to combat financial system abuse. Supervisors in different countries exchange information (often based on a network of memoranda of understandings) about individual banks, insurance companies, or agents in the securities markets, with a view to uncover unsound and illegal activities such as securities fraud, insider trading, or misreporting. Supervision is also exercised over the internal mechanisms to control risks, particularly operational risks, which also contributes to countering fraud and other forms of financial crime.(6) Out of concern over the potential impact of tax-induced distortions in capital and financial flows on welfare and on individual countries tax bases, the OECD initiated coordinated action for the elimination of harmful tax practices. In May 1998, the OECD issued a report on Harmful Tax Competition including a series of 19 recommendations for combating harmful tax practices, established aForum on Harmful Tax Practices, and proposed Guidelines for Dealing with Harmful Preferential Regimes in Member Countries (Annex II). In June 2000, OECD issued a list of countries it considers as engaged in harmful tax practices.。
物体六维姿态估计基础知识
物体六维姿态估计基础知识Estimating the six-dimensional pose of an object is a fundamental concept in computer vision and robotics. It involves determining the position and orientation of an object in 3D space. This information is crucial for various tasks, such as object manipulation, robotic navigation, and augmented reality applications.在计算机视觉和机器人领域,估计物体的六维姿态是一个基础概念。
它涉及确定物体在三维空间中的位置和方向。
这些信息对于各种任务至关重要,比如物体操纵、机器人导航和增强现实应用。
There are several methods to estimate the six-dimensional pose of an object. One common approach is using visual sensors, such as cameras, to capture images of the object from different viewpoints. These images are then processed to extract features that can be used to calculate the object's pose. Another method involves using depth sensors, such as LiDAR or structured light cameras, to directly measure the 3D structure of the object and estimate its pose.有几种方法可以估计物体的六维姿态。
Random Sampling and Sampling Distributions随机抽样和抽样分布精品文档

Population and Sample
Population
Sample
A number describing a population
A number describing a sample
Random Sampling from a Population
To make an inference about a population parameter (characteristic), we draw a random sample from the population
(We need more info)
Sampling Distribution of a Sample Proportion
If X follows a binomial distribution, then to find the probability of a certain number of successes in n trials, we need to know the probability of a success p
A population is the set of all the elements of interest.
A sample is a subset of the population. The sample results provide only estimates
of the values of the population characteristics. With proper sampling methods, the sample results will provide “good” estimates of the population characteristics.
lasso 系数估算
lasso 系数估算英文回答:Lasso coefficient estimation refers to the methods used to estimate the coefficients of a lasso regression model. Lasso (Least Absolute Shrinkage and Selection Operator) is a popular regularization technique used in linear regression to select important features and shrink the coefficients of less important features. Estimating the lasso coefficients involves finding the optimal values of the coefficients that minimize the loss function, which is typically the sum of squared residuals, subject to the lasso penalty. The lasso penalty is a constraint on the sum of the absolute values of the coefficients, and its strength is controlled by a hyperparameter λ.There are several approaches to estimate lasso coefficients. One common method is the coordinate descent algorithm, which involves iteratively updating each coefficient while holding the others fixed. Anotherapproach is the proximal gradient descent algorithm, which involves taking a gradient step followed by a proximal operator that applies the lasso penalty.The choice of coefficient estimation method depends on the size and complexity of the dataset. For small tomedium-sized datasets, the coordinate descent algorithm is often sufficient. For larger datasets, proximal gradient descent tends to be more efficient.Once the lasso coefficients have been estimated, they can be used to make predictions or to select important features. The coefficients indicate the relative importance of each feature in the model, and features withcoefficients close to zero can be considered less important.中文回答:lasso 系数估计是指用于估计 lasso 回归模型系数的方法。
钻井压耗工程公式估算漏层位置

文章编号:1000 − 7393(2023)06 − 0704 − 08 DOI: 10.13639/j.odpt.202310001钻井压耗工程公式估算漏层位置罗黎敏1 谭睿2 耿立军1 李小波3 徐正贤2 闫伟21. 中海石油(中国)有限公司天津分公司;2. 中国石油大学(北京)非常规油气科学技术研究院;3. 中海油安全技术服务有限公司引用格式:罗黎敏,谭睿,耿立军,李小波,徐正贤,闫伟. 钻井压耗工程公式估算漏层位置[J ]. 石油钻采工艺,2023,45(6):704-711.摘要:钻井作业过程中井漏现象会损害油气储层,引发井塌、井喷、卡钻以及部分井段报废等恶性事件,是制约油气田安全高效开发的技术难题,准确判定漏层位置是现场解决钻井井漏问题的关键。
常规漏层位置确定方法计算复杂、误差大、经济性差,因此基于钻井压耗公式和立压、套压数据提出了一种快速估算漏层位置和喷漏转换时间的方法。
根据入口注入流量、排量、循环压耗和流态数据计算流态摩阻,结合漏失前后立压、套压数据迭代计算漏失层位、确定漏点位置,并根据转喷立压、套压确定漏喷转换时间。
对渤海区域2口漏失井的漏层位置计算发现,估算的漏层位置与现场探明的漏层位置重叠性较高,计算误差低于5.06%,估算漏层范围100%覆盖现场漏失层位;并且立压越大,漏喷转换时间越长。
该方法计算过程方便简洁,降低过多输入参数精度不足带来的误差,可作为漏层位置确定的前置计算方法为现场堵漏作业提供技术支撑。
关键词:钻井;压耗;井漏;漏层位置;立管压力;套管压力; 工程技术中图分类号:TE28 文献标识码: AEstimating the location of leakage layer by drilling pressure loss engineering formulaLUO Limin 1, TAN Rui 2, GENG Lijun 1, LI Xiaobo 3, XU Zhengxian 2, YAN Wei 21. CNOOC (China ) Tianjin Branch Company , Tianjin 300452, China ;2. Unconventional Oil and Gas Science and Technology Research Institute , China University of Petroleum (Beijing ), Beijing 102249, China ;3. CNOOC Safety Technology Service Co., Ltd., Tianjin 300452, ChinaCitation: LUO Limin, TAN Rui, GENG Lijun, LI Xiaobo, XU Zhengxian, YAN Wei. Estimating the location of leakage layer by drilling pressure loss engineering formula [J ]. Oil Drilling & Production Technology, 2023, 45(6): 704-711.Abstract: The phenomenon of well leakage during drilling operations can damage oil and gas reservoirs, leading to malignant events such as well collapse, blowout, stuck drilling, and scrapping of some sections of the well, which poses a technical challenge in the safe and efficient development of oil and gas fields. Accurately determining the location of formation leakage is crucial for on-site resolution of drilling leakage issues. Conventional methods for determining leakage locations are complex, prone to errors, and economically inefficient. Therefore, a rapid method for estimating the leakage location and the time of leakage transition based on drilling pressure loss formula, standpipe pressure, and casing pressure was proposed. The method involves calculating flow regime friction based on the injected flow rate, displacement, circulating pressure loss, and flow regime, calculating leakage formation and determining leakage location based on the iteration of data from standpipe pressure and casing pressure before and after leakage, and determining the time for leakage transition according to standpipe pressure and casing pressure. The calculated leakage location for two leaking wells in the Bohai Sea region show a high overlap with the confirmed leakage location on site, with a calculation error below 5.06%, and the estimated leakage range 100% covers the on-site leakage locations. Furthermore, as the standpipe pressure第一作者: 罗黎敏(1979-),2003年毕业于江汉石油学院石油工程专业,现主要从事海上油气田钻完井作业管理和技术研究工作,高级工程师。
如何衡量得失英语作文

如何衡量得失英语作文英文回答:Measuring the weight of a decision requires careful consideration of the potential outcomes and their associated values. The decision-making process should be guided by several key steps:1. Identify the Decision: Clearly articulate the choice that needs to be made, considering both the short-term and long-term implications.2. Gather Information: Seek out relevant data, perspectives, and experiences that can inform the decision-making process. Utilize both qualitative and quantitative sources to gain a comprehensive understanding of the situation.3. Evaluate the Options: Systematically assess each potential outcome, examining its likelihood, potentialimpact, and alignment with personal values and goals. Consider both the benefits and drawbacks, as well as the potential risks and rewards.4. Consider the Consequences: Reflect on the broader effects of the decision, taking into account the impact on individuals, organizations, and society as a whole. Weigh the potential consequences against the potential rewards.5. Make a Decision: Based on the evaluation of the options and their potential consequences, make a choice that aligns with personal values and priorities. Consider both the short-term and long-term implications of the decision.6. Monitor and Reflect: Regularly review the decision and its outcomes, evaluating whether it met the desired objectives and whether there are any lessons to be learned for future decision-making.中文回答:如何衡量得失。
欧拉角插值算法

欧拉角插值算法(中英文实用版)Title: Euler Angle Interpolation AlgorithmTitle: 欧拉角插值算法Introduction:Euler angle interpolation is a mathematical technique used to estimate the position of a body in space based on its initial and final orientations.This interpolation method is widely used in computer graphics, robotics, and other fields that involve the representation and manipulation of orientation.介绍:欧拉角插值是一种用于根据物体的初始和最终取向估计其在空间中位置的数学技术。
这种插值方法在计算机图形学、机器人技术和其他涉及取向表示和操作的领域中广泛应用。
Algorithm Explanation:The Euler angle interpolation algorithm works by computing the shortest path between two orientations in 3D space.This path is defined by a series of intermediate orientations that are linearly interpolated between the initial and final orientations.The algorithm takes into account the rotation order and the specific sequence of rotations to ensure accurate interpolation.算法解释:欧拉角插值算法通过计算三维空间中两个取向之间的最短路径来工作。
机械制造专业外文翻译--热轧工艺
外文原文:The Hot Rolling ProcessThe primary function of the Hot Strip Mill is to reheat semi-finished steel slabs of steel nearly to their melting point, then roll them thinner and longer through 12 successive rolling mill stands driven by motors totaling 77,000 hp, and finally coiling up the lengthened steel sheet for transport to the next process.The Hot Mill rolls slabs weighing up to 30 tons between 30” and 74”. Steel slab 8 to 9 inches thick and up to 36feet long is rolled into strip as thin as 1/16 inches and up to a half-mile in length. Coils are produced with a 30” inside diameter ('eye') on one of two coilers, with outside diameter limitations of 72” and 74”, corresponding to850 and 1000 pounds-per-inch-width (PIW), respectively. The mill supplies coil for each of CSI's remaining operations, as well as a finished product for shipment directly to CSI's customers.Most material is transported out of the mill area by an automated coil handling system, though some skelp for the Pipe Mill is staged toward the east end of the mill bay until it is cool enough to load onto rail cars.ReheatingCritical to the Hot Strip Mill is its walking-beam reheat furnace, state-of-the art equipment that replaced and now outperforms three older- (pusher-) style furnaces. Nominally rated to produce 270 tons-per-hour, improvements in efficiency and some sacrifice in slab temperature uniformity enable extended productionrates 25% above design. Heating this much steel from room temperature to 2200-2400 degrees Fahrenheitconsumes around 10 million cubic feet of natural gas each day.As slabs are assigned to orders, schedules are written and material is staged with rail-cars and overhead cranes in the slab yard at the west end of the Hot Strip Mill. Slabs are placed, one at a time, on a roll line. The slab's dimensions and weight are confirmed as it is positioned in front of the charge door on the south side of the furnace. When space is available in the furnace, large electro-mechanical ' pusher armsengage to move the slabs into the furnace.Once inside, the slabs are supported about eight feet off of the furnace floor by water-cooled, refractory-coated pipes called 'skids'. To minimize the cold spots ('skid marks') left in the slab, the skid spacing changes approximately two-thirds of the way through the furnace Two independent sets of skids, one fixed, one walking, take turns supporting the slab as it is walked through the furnace by a massive sub-frame energized by a pair of large hydraulic cylinders.The interior of the furnace is 38'9” wide, fifteen feet from floor to ceiling, and 142' long. It is divided into eight zones for temperature control: preheat, top-and-bottom; heating,top-and-bottom; and soak, top-and-bottom, east-and-west. The preheat and heating zones combust a mixture of natural gas and preheated combustion air with massive burners on the side walls of the furnace, both above and below the skids, to heat the slab nearly to its discharge temperature.Much of the preheating of the steel is achieved by the hot exhaust gases rushing past the slabs on the way to the recuperators' above the charge door. Whatever heat is left in the exhaust gases preheats the incoming combustion air to over 1000° F in these massive heat-exchangers.Conversely, in the heating zone the steel is primarily heated by the glowing-hot furnace walls. In the soak zone, numerous smaller burners seek to maintain a uniform temperature within the zones to equilibrate any cold spots in the slabs. Refractory dividers help to physically distinguish the zones, and thermocouple temperature sensors throughout the furnace interact with the automatic burner control systems to maintain the target temperatures in each zone.Complex computer models calculate the targeted roughing mill exit temperature to obtain a furnace discharge ('drop-out') aim temperature. Estimating the temperature profile through the thickness of each slab in the furnace on an ongoing basis, the computer aids the operator in selecting the production rate and zone set-points that will maximize production of steel slabs uniformly heated to as close to the target temperature as possible. After the rolling process begins, as the steel exits the roughing mill, its temperature is fed back to the furnace,updating the computer models and informing the Heater as to the temperature uniformity.When the slab reaches the 'discharge door' at the exit end of the furnace, and the computer has determined that the slab has been sufficiently heated, the door opens and massive 'extractor arms' reach beneath the slab, lift it off of the skid supports, and draw it out of the furnace. The east and west extractors can act independently of one another to remove double-charged slabsone-at-a-time, or in conjunction to extract longer slabs. The intensely hot slab is placed on a roller table which carries it into the roughing mill.DescalingAfter exiting the reheat furnace, the slab passes through a descaling unit, an enclosure employing two pairs of spray headers that blast the intensely hot slab with 1,500 psi pressurized water to remove the 1/8-inch thick layer of oxidized iron that forms at the surface of the slab in the oxygen-rich atmosphere of the reheat furnace. Shortly after descaling, a (relatively) small 2-hi rolling mill called a scalebreaker reduces the slab's thickness by about one inch to break up any scale that remains. Just before the next reduction pass is taken, 'sweep sprays' clean away any loosened scale that remains on the slab surfaces. The transfer bar will be descaled twice more during roughing, immediately prior to the third and to the last rolling operation, to remove the scale that has grown back over the three minutes or so that it spends in the roughing mill. RoughingThe roughing mill is made up of six independent rolling mill stands, the last four of which incorporate small vertical rolling mills called edgers. Slabs heated in the furnace until they glow bright orange-yellow are rolled through one stand at a time to produce so-called transfer bars suitable for finish rolling. High-pressure water-jet nozzles clean the oxidized iron, or scale, from the surface along the way.As the transfer bar exits the last roughing mill stand, the thickness of the leading edge of the bar is estimated. Similarly, a pyrometer measures the temperature profile of the bar from head to tail and a special camera photographs both ends. Depending on the gauge, width, and grade of the product to be rolled, the average temperature of the bar as it exits the last roughing mill normally ranges from 1900° to 2100° Fahrenheit. This data is collected in anticipation of finish rolling. Computers immediately begin calculating the speeds and gaps for threading the six finishing mills, which will roll the steel in tandem with one another.The workhorse roughing mill has 135” wide rolls for rolling 'broadside' (as the first roughing mill is commonly called) to make a slab wider. A 5,000 hp motor drives 42”-diameter work-rolls through 28:1 gears to reduce theslab's thickness by as much as 2-½”.The last four roughing mills each incorporate edgers for width control and roll the bar from five to six inches thick incrementally down to around an inch and a quarter, depending on the customer's ordered width, gauge, and steel grade. As mentioned previously, the third and fifth roughing mills each have high-pressure descaling headers operating at 1,500 psi. The individual roughing mills are spaced increasingly further apart to accommodate the lengthening of the transfer bars as they are rolled thinner and thinner.CroppingBecause a square head-end is critical to properly threading the finish mills and the downcoilers, and because an uneven tail can bruise work-roll surfaces or cause threading problems for the next production process, the head- and tail-ends of nearly every transfer bar are cropped by a pair of large steel drums each with a shear- blade extending along its length. With the bar crawling along the roller table at around 100 fpm, sensors detect its position and speed in order to time the crop shear drums to optimize the amount cropped; since transfer bars are over an inch thick, each extra inch of crop-length scraps another 15-30 lbs.FinishingCSI's Hot Strip Mill includes six finishing mills, which reduce the thickness of the transfer bar down to the gauge required by the customer or the next process. The rolling speed is set to allow the last stand to perform the final reduction at the finishing temperature, between 1500° to 1650°F, specified to reach certain mechanical properties.By now, the steel has been rolled into a flat bar as long as 200 feet. In contrast to the roughing mills, the finishing mills roll the transfer bar in tandem, meaning each bar will be rolled through all six stands at once. The hot steel is quite fragile as it is rolled and tension between the finishing mill stands must be closely controlled at very low levels in order to avoid stretching or tearing the strip.Prior to the finish rolling operation, the head- and tail-ends of the transfer bar will be sheared to square them up, helping to ensure proper threading and tail-out. A final two-stage descaling operation is performed to clean off the scale that has grown on the bar during roughing. Once the bar is threaded between each successive pair of mills, a free-turning roll on an electro-mechanical pivot called a looper roll engages the bottom of the strip to monitor the tension between the stands.Adjustments are made as necessary to ensure the strip threads properly through each of the mills without looping up and folding over or stretching and tearing apart. The position of each roll is fed back to the finishing mill's sophisticated automation system which, along with information from the load cells that monitor rolling force and from the X-ray gauge measuring final strip thickness, work to smoothly adjust the roll gaps and speeds to maintain stable rolling of strip to the necessary thickness in spite of the temperature variations present in every bar.Laminar CoolingMetallurgically critical to the properties of hot-rolled steel is the coiling temperature, as the coil will cool from this temperature to ambient over the course of three days. Essentially a heat treatment comparable to annealing, the stresses imparted to the steel during reduction from nine inches thick down to ordered gauge are given the opportunity as the coil cools to relieve themselves. Though the steel is continually recrystallizing during hot- rolling, reductions in thickness sometimes in excess of 99% and taking place in less than ten minutes stress the steel considerably; coiling temperature is specified by product metallurgists to harness and manipulate those stress levels in search of optimal mechanical properties.Product sold as hot rolled and hot rolled pickled and oiled to be laser cut by a customer is coiled at relatively high temperatures to try to relax the steel as much as possible so that parts cut from the coil will lie flat even after residual stresses have resolved themselves around the part's configuration。
鱼类种群动力学作业
1.GlossaryAbundance Index 丰度指数:一种定量测量的鱼群密度或丰富度的方法,通常作为一个时间序列。
一种丰富度指数可以具体到一个地区或一个的群体中,或者它也可以指丰富度资源宽度,这个指数可以在分级上反映丰富度或在重量(生物量)上反映。
虽然依赖于渔业丰富度指数的科学调查指标也被使用,但是很多丰富度指数目前普遍使用基于CPUE 标准化数据上的SCRS。
Absolute recruitment绝对补充量:单位时间内(通常是一年)在可缓冲的范围内所补充进来的鱼的数量。
Age-length Key年龄—长度图解法:通过长度测量来估测年龄的一种方法。
例如,长度-年龄相关可以将捕获大小转换成捕获年龄组成的数据。
这种方法依据的是一条鱼的大小与它本身的一到多个年龄群体有关。
长度-年龄关键需要建立在长度/年龄数据的样本上(年度的),而这对金枪鱼来说是比较困难的。
所以,这种世代隔离的方法更多的运用于SCRS.Age 年龄:生命所成长到的年数。
这里是由阿拉伯数字记录,如果数据不明确可以在具体的数字上加一个记号(5年,5+年)Age (t+)t龄及以上年龄:t可以是任何的数据,它表示介于(t) 和(t+1)的年龄段之间.Age validation年龄确认:可以在多骨鱼类上准确鉴别出的年轮(如耳石、鱼鳞、脊椎或者鳍脊),在甲壳类动物的贝壳上或者是水产哺乳动物的耳塞上都可以找到与之相符的预测时间(年或者天等),所以它们的数量可以作为年龄的指示。
Ageing technique年龄鉴定技术:Age of Maturity成熟年龄:50%的给定性别的鱼类个体达到性成熟的年龄。
Age of Recruitment补充群体年龄:被认为是补充到渔场里面的鱼群的年龄。
在一般的种群评估,通常在分析中认为最年轻的群体年龄在0-1龄之间为补充群体的年龄。
Archival Tag贮存性标志器(连续长期记录温盐):将信息储存在微芯片里得一种标记,档案标记通常用于研究鱼类这样的生物体,因为它们可以储存鱼体内部的信息和外部的包括温度、压力(用于估测水深)和光亮强度(用于确定地理位置)等几年的信息Assessment评估:通过科学系统的方法对资源的状况作出评估,如鱼类种群(种群规模、潜在产量、是否是过度或者未开发等),通常是用于给管理当局提供合适的建议。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Proc.of the Fourteenth National Conference on Artificial Intelligence(AAAI-96)Estimating the Absolute Position of a Mobile RobotUsing Position Probability GridsWolfram Burgard and Dieter Fox and Daniel Hennig and Timo SchmidtInstitut f¨u r Informatik III,Universti¨a t BonnR¨o merstr.164D-53117Bonn,Germanywolfram,fox,hennig,schmidt1@uran.cs.uni-bonn.deAbstractIn order to re-use existing models of the environment mobilerobots must be able to estimate their position and orientationin such models.Most of the existing methods for positionestimation are based on special purpose sensors or aim attracking the robot’s position relative to the known startingpoint.This paper describes the position probability grid ap-proach to estimating the robot’s absolute position and orien-tation in a metric model of the environment.Our method isdesigned to work with standard sensors and is independentof any knowledge about the starting point.It is a Bayesianapproach based on certainty grids.In each cell of such agrid we store the probability that this cell refers to the cur-rent position of the robot.These probabilities are obtainedby integrating the likelihoods of sensor readings over time.Results described in this paper show that our technique isable to reliably estimate the position of a robot in complexenvironments.Our approach has proven to be robust withrespect to inaccurate environmental models,noisy sensors,and ambiguous situations.IntroductionIn order to make use of environmental models mo-bile robots always must know their current position andorientation in their environment.Therefore,the ability ofestimating their position is one of the basic preconditionsfor the autonomy of mobile robots.The methods for po-sition estimation can be roughly divided into two classes:relative and absolute position estimation techniques(Feng,Borenstein,&Everett1994).Members of thefirst classtrack the robot’s relative position according to a knownstarting point.The problem solved by these methods isthe correction of accumulated dead reckoning errors com-ing from the inherent inaccuracy of the wheel encoders andother factors such as slipping.Absolute position estimationtechniques attempt to determine the robot’s position with-out a priori information about the starting position.Theseapproaches of the second class can be used to initialize thetracking techniques belonging to thefirst class.over time compensates noise and is necessary to resolve ambiguities.Position probability grids simultaneously address all these desiderata.They allow a mobile robot to determine its position in typical office environments within a short time. Moreover,our method is able to deal with uncertain sensor information and ambiguous situations.The approach described in this paper is based on the con-struction of certainty grid maps described in(Moravec& Elfes1985).Certainty grid maps have been proven to be a powerful means for the solution of different problems. Originally,they were designed to provide a probabilistic model of the robot’s environment.In the past such occu-pancy probability maps or variants of them have been suc-cessfully used for collision avoidance(Borenstein&Ko-ren1990;1991)and path planning(Buhmann et al.1995; Moravec1988).This paper issues a further application area of this technique,namely the estimation of the absolute po-sition of a robot.The principle of our approach is to accu-mulate in each cell of the position probability grid the pos-terior probability of this cell referring to the current position of the robot.Because we have to consider a discrete set of possible orientations in addition to the discretization of the two-dimensional environment,position estimation is a three-dimensional problem.This extension,however,does not result in any principle problems,because the certainty grid concept can easily be extended to problems with higher dimensionality(Moravec&Martin1994).Related workVarious techniques for the estimation of the position of mo-bile vehicles by matching sensor readings against a given model of the environment have been developed in the past(Cox&Wilfong1990;Feng,Borenstein,&Everett 1994).Most of them address the problem of tracking the current position and orientation of the robot given its initial configuration.Recently,more and more probabilistic tech-niques are applied to position estimation problems.These approaches can be distinguished by the type of maps they rely on.Techniques based on metric or grid-based representa-tions of the environment generally generate unimodal or Gaussian distributions representing the estimation of the robot’s position.(Weiß,Wetzler,&von Puttkamer1994) store angle histograms constructed out of range-finder scans taken at different locations of the environment.The po-sition and orientation of the robot is calculated by max-imizing the correlation between histograms of new mea-surements and the stored histograms.(Schiele&Crowley 1994)compare different strategies to track the robot’s posi-tion based on occupancy grid maps.They use two different maps:a local grid computed using the most recent sensor readings,and a global map built during a previous explo-ration of the environment or by an appropriate CAD-tool. The local map is matched against the global map to pro-duce a position and orientation estimate.This estimate is combined with the previous estimate using a Kalmanfilter (Maybeck1990),where the uncertainty is represented by the width of the Gaussian pared to the ap-proach of Weißet al.,this technique allows an integration of different measurements over time rather than taking the optimum match of the most recent sensing as a guess for the current position.Other researchers developed positioning techniques based on topological maps.(Nourbakhsh,Powers,&Birch-field1995)apply Markov Models to determine the node of the topological map which contains the current position of the robot.Different nodes of the topological map are dis-tinguished by walls,doors or hallway openings.Such items are detected using ultrasonic sensors,and the position of the robot is determined by a“state-set progression technique”, where each state represents a node in the topological map. This technique is augmented by certainty factors which are computed out of the likelihoods that the items mentioned above will be detected by the ultrasonic sensors.(Sim-mons&Koenig1995)describe a similar approach to po-sition estimation.They additionally utilize metric informa-tion coming from the wheel encoders to compute state tran-sition probabilities.This metric information puts additional constraints on the robot’s location and results in more reli-able position estimates.(Kortenkamp&Weymouth1994) combine information obtained from sonar sensors and cam-eras using a Bayesian network to detect gateways between nodes of the topological map.The integration of sonar and vision information results in a much better place recogni-tion which reduces the number of necessary robot move-ments respectively transitions between different nodes of the topological map.Due to the separation of the environment into different nodes the methods based on topological maps,in contrast to the methods based on metric maps described above,allow to deal with ambiguous situations.Such ambiguities are represented by different nodes having high position proba-bilities.However,the techniques based on topological maps provide a limited accuracy because of the low granularity of the discretization.This restricted precision is disadvan-tageous if the robot has to navigate fast through its environ-ment or even grasp for objects.The position probability grid method described here al-lows to estimate the robot’s position up to a few centime-ters.This is achieved by approximating a position probabil-ity function over a discrete metric space defining possible positions in the environment.It therefore can be used to provide an initial estimate for the tracking techniques.But even the methods based on topological maps could be aug-mented by our approach.If the nodes of the topological map additionally contain metric information,our approachcould be used to position the robot within a node.Building position probability gridsThe certainty grid approach was originally designed by Elfes and Moravec as a probabilistic grid model for the rep-resentation of obstacles.The basic idea is to accumulate in each cell of a rectangular gridfield the probability that this cell is occupied by an obstacle.Whereas Moravec and Elfes construct a model of the environment given the position of the robot and sensor readings,we go the opposite direction estimating the position given the environmental model and the sensor readings.For this purpose,we construct a posi-tion probability grid containing in eachfield the posterior probability that thisfield includes the current position of the robot.For a gridfield this certainty value is obtained by repeatedlyfiring the robot’s sensors and accumulating in the likelihoods of the sensed values supposed the center of currently is the position of the robot in the environment model.Each time the robot’s sensors arefired,the fol-lowing two steps are carried out:1.Update according to the movement of the robot sincethe last update.This includes a processing of to deal with possible dead-reckoning errors.2.For each gridfield of and each reading,computethe likelihood of supposed is the current position of the robot in,and combine this likelihood with the probability stored in to obtain a new probability for.The basic assumptions for our approach are:The robot must have a model of the world the sensor readings can be matched against.Such models can ei-ther come from CAD-drawings of the environment or can themselves be grid representations of occupancy proba-bilities.The robot does not leave the environmental model.This assumption allows us to use the same size for the position probability grid as for the environmental model,and to set the probability for positions outside of to.In the remainder of this section we describe how to inte-grate different sensor readings into position probabilities. Furthermore we show how to keep track of the robot’s movements with explicit consideration of possible dead-reckoning errors.Integrating multiple sensor readingsIn order to give reliable position estimates we have to inte-grate the information of consecutive sensor readings.Sup-pose is the model of the environment,andis the(posterior)probability that refers to the current position of the robot,given and the sensor readings.Then,to update the probability forgiven new sensory input we use the following update formula(Pearl1988):(1) The term is the likelihood of measuring the sensory input given the world model and assuming that refers to the current position of the robot.The con-stant simply normalizes the sum of the position probabil-ities over all up to.To initialize the grid we use the a priori probability of referring to the actual position of the robot given.The estimation of and de-pends on the given world model and the type of the sensors used for position estimation.Below we demonstrate how to use occupancy probability maps for position estimation and how sensor readings of ultrasonic sensors are matched against such maps.Integrating the movements of the robotIn order to update the grid according to the robot’s move-ments and to deal with possible dead reckoning errors we use a general formula coming from the domain of Markov chains.We regard each cell in as one possible state of the robot,and determine a state transition probabilityfor each pair,of cells in,which depends on the trajectory taken by the robot and the time elapsed since the previous update.This transition prob-ability should also model how the trajectoryfits into the environment.For example,a trajectory leading the robot through free space has a higher probability than a trajectory blocked by an obstacle.Thus,the new probability of a grid field after a movement of the robot is:(2)where is a normalizing constant.At any time thefield of with the highest probability represents the best es-timation for the current position of the robot.The confi-dence in this estimation depends on the absolute value of the probability and on the difference to the probabilities in the remainingfields of the grid.Thus,ambiguities are rep-resented by differentfields having a similar high probabil-ity.Position estimation with occupancyprobability maps as world modelIn this section we describe the application of this ap-proach by matching ultrasonic sensors against occupancy grid maps.Matching sonar sensor readings against occupancy gridsTo compute the likelihood that a sensor reading is received given the position and an occupancy gridmap we use a similar approach as described in(Moravec 1988).We consider a discretization of possible distances measured by the sensor.Consequently,is the likelihood that the sonar beam is reflected in .Suppose is the likelihood that the cell reflects a sonar beam,given the position of the robot and the map.Furthermore suppose that belongs to .Assuming the reflection of the sonar beam by being conditionally independent of the reflection of the other cells in,the likelihood that reflects a sonar beam is(3)Before the beam reaches,it traverses. Supposed that the sonar reading is included by range, the likelihood equals the likelihood thatreflects the sonar beam given that none of the rangesreflects it.Thus,we have(4)Computing position estimates using occupancy gridsIt remains to estimate the initial probability that thefield of contains the current position of the robot. We assume that this probability directly depends on the oc-cupancy probability of thefield in:the higher the occupancy probability,the lower is the position probability and vice versa.Therefore,the value is computed as follows:ABCStep 112340123456700.00030.0006x [m]y [m]maximum probabilityABCStep 212340123456700.0020.004x [m]y [m]maximum probability A BC Step 412340123456700.0030.0060.009x [m]y [m]maximum probability A Step 1212340123456700.10.2x [m]y [m]maximum probabilityFigure 2:Position probability distribution after 1,2,4,and 12stepsAfter the first reading we obtain a multi-modal distribu-tion with several small local maxima.At the correct posi-tion we observe only a small peak,which is dominated by the starting position of trajectory B .After interpreting the second set of readings the probabilities become more con-centrated.We observe four small peaks which now have their maximum in position 2of trajectory C .The third and fourth reading sets support the initial position so that the po-sition on trajectory A gets the maximum probability.There are two peaks where the smaller one is a super-imposition of two different peaks for the trajectories B and C .After evaluating 12sonar sweeps all ambiguities are resolved,and the result is a significant and unique peak with prob-abilityfor the final point of trajectory A .This position in fact refers to the real position of the robot.Dealing with large environmentsIn the previous example ambiguities appeared as several peaks in the position probability distribution.In large en-vironments we have to expect that due to the limited range of the proximity sensors ambiguities spread out over com-plete regions.In order to demonstrate the capability of our approach to deal with such complex situations we applied it to the arena of the AAAI ’94mobile robot competition(Simmons 1995).The size of this arena amounts.Figure 3shows the occupancy grid map of this arena con-structed with the map-building tool described in (Thrun 1993).The sonar sensor measurements were recorded dur-ing an exploration run in this arena.The trajectory of the robot and the 12positions at which the sensors were fired are included in Figure 3.Again we only used 8of the 24sonar sensors and the same resolution for the position prob-ability grid as in the previous example.Figures 4and 5show logarithmic density plots of the maximum position probabilities for all directions after in-terpreting 6and 12sets of sensor readings.Although the information obtained after the first 6sensor readings does not suffice to definitely determine the current position of the robot,it is obvious that the robot must be in a long cor-ridor.After 12steps the position of the robot is uniquely determined.The corresponding grid cell has a probability of 0.96while the small peak at the bottom of Figure 5has a maximum of 8e-6.ConclusionsWe presented the position probability grid approach as a ro-bust Bayesian technique to estimate the position of a mobile robot.Our method allows the integration of sensor readings from different types of sensors over time.We showed that this method is able to find the position of a robot even if noisy sensors such as ultrasonic sensors and approximative environmental models like occupancy grid maps are used.Our approach has any-time characteristic,because it is able to give an estimation for the current position of the robot already after interpreting the first sensor reading.By in-corporating new input this estimation is continuously im-proved.Position probability grids allow to represent and to deal with ambiguous situations.These ambiguities are resolved if sufficient sensory information is provided.Our technique has been implemented and tested in several com-plex real-world experiments.The only precondition for the applicability of the position probability grid approach is an environmental model which allows to determine the likelihood of a sensor reading at a certain position in the environment.In our implementa-tion we used occupancy probability grids as world model in combination with ultrasonic sensors.Alternatively one could use a CAD-model of the environment and cameras for edge detection or integrate simple features like the color of the floor.Using the currently implemented system our robot needs about one minute to determine its position in a typical of-fice.Although the computation time depends linearly on the grid size,very large environments such as thewide AAAI ’94robot competition arena do not impose any principle limitations on the algorithm.We are convinced that different optimizations will make our approach appli-cable online even in such large environments.The most important source for speed-up lies in the pre-analysis of the environmental model.This includes computing and storing the likelihoods of all possible sensor readings for all posi-tions.Additionally,in orthogonal environments the reduc-tion of possible orientations to the alignment of the walls drastically reduces the complexity of the overall problem.Furthermore,the application of a map resolution hierar-chy as proposed in (Moravec 1988)can be used to produce rough position estimates which are refined subsequently.Figure3:Occupancy grid map of theAAAI’94mobile robot competitionFigure4:Density plot after6steps Figure5:Density plot after12stepsDespite these encouraging results there are several war-rants for future research.This concerns optimizations as de-scribed above as well as active exploration strategies.Such strategies will guide the robot to points in the environment, which provide the maximum information gain with respect to the current knowledge.ReferencesBorenstein,J.,and Koren,Y.1990.Real-time obsta-cle avoidance for fast mobile robots in cluttered environ-ments.In Proc.of the IEEE International Conference on Robotics and Automation,572–577.Borenstein,J.,and Koren,Y.1991.The vectorfield his-togram-fast obstacle avoidance for mobile robots.IEEE Transactions on Robotics and Automation7(3):278–288. Buhmann,J.;Burgard,W.;Cremers,A.B.;Fox,D.;Hof-mann,T.;Schneider,F.;Strikos,J.;and Thrun,S.1995. The mobile robot Rhino.AI Magazine16(2):31–38. Cox,I.,and Wilfong,G.,eds.1990.Autonomous Robot Vehicles.Springer Verlag.Feng,L.;Borenstein,J.;and Everett,H.1994.“Where am I?”Sensors and Methods for Autonomous Mobile Robot Positioning.Technical Report UM-MEAM-94-21,Uni-versity of Michigan.Kortenkamp,D.,and Weymouth,T.1994.Topological mapping for mobile robots using a combination of sonar and vision sensing.In Proc.of the Twelfth National Con-ference on Artificial Intelligence,979–984. Maybeck,P.S.1990.The Kalmanfilter:An introduction to concepts.In Cox and Wilfong(1990).Moravec,H.P.,and Elfes,A.1985.High resolution maps from wide angle sonar.In Proc.IEEE Int.Conf.Robotics and Automation,116–121.Moravec,H.P.,and Martin,M.C.1994.Robot navigation by3D spatial evidence grids.Mobile Robot Laboratory, Robotics Institute,Carnegie Mellon University. Moravec,H.P.1988.Sensor fusion in certainty grids for mobile robots.AI Magazine61–74.Nourbakhsh,I.;Powers,R.;and Birchfield,S.1995. DERVISH an office-navigating robot.AI Magazine 16(2):53–60.Pearl,J.1988.Probabilistic Reasoning in Intelligent Sys-tems:Networks of Plausible Inference.Morgan Kauf-mann Publishers,Inc.Schiele,B.,and Crowley,J.L.1994.A comparison of position estimation techniques using occupancy grids.In Proc.of the IEEE International Conference on Robotics and Automation,1628–1634.Simmons,R.,and Koenig,S.1995.Probabilistic robot navigation in partially observable environments.In Proc.International Joint Conference on Artificial Intelli-gence.Simmons,R.1995.The1994AAAI robot competition and exhibition.AI Magazine16(2):19–29.Thrun,S.1993.Exploration and model building in mobile robot domains.In Proceedings of the ICNN-93,175–180. San Francisco,CA:IEEE Neural Network Council.Weiß,G.;Wetzler,C.;and von Puttkamer,E.1994.Keep-ing track of position and orientation of moving indoor sys-tems by correlation of range-finder scans.In Proceedings of the International Conference on Intelligent Robots and Systems,595–601.。