基于PIC的CAN总线超声波测距智能节点设计
基于CAN总线的嵌入式超声波测距仪
2 8正 00
仪 表 技 术 与 传 感 器
I sr m e Te hnqu a S ns r n tu nt c i e nd e o
2 8 o0
No .1
第1 期
基 于 C N 总 线 的 嵌 入 式 超 声 波 测 距 仪 A
ta o i v r n mitn n e e vn ic t. W h n t i y tm sta mitn n c e i h lr o c wa e sg l tc n r nc wa e ta s ti g a d r c i ig cr ui s s e h ss se i r ns tig a d a c pt ng te u ta ni v ina ,i a s c lult h fe e e et e h i e o r ns i ig a d r c ii g te u ta o c wa e, a he we a no te a c r t ac ae t e di rnc sb we n te t fta m t n n e ev n h lr s ni v f m t nd t n c k w h c u ae n
关键字 :A C N总 线 ; 声 波 ; 距 仪 ; 处 理 器 超 测 微
中图分类号 :P 1 . T 261
文献标 识码 : B
文章编号 :0 2—14 (0 8 0 — 0 8— 3 10 8 1 2 0 ) 1 0 2 0
Em b d e t a o c D it n e M e s e e t e d d Ulr s ni s a c a ur m n I sr n t um e s d o ntBa e n CAN S BU
ZH OU a— ma 一 CHENG a —hu Hu o. Xio i FU n’ Ha
基于CAN总线通信的车用超声波测距仪设计

将超 声波应 用 于距离 检测 ,具有 准确 性高 、性
络控制 .
能 可 靠 、维 护 方 便 等 优 点 ,在 国 内 外 应 用 广 泛.
C N( o t l r raN tok 总 线是 一 种 串行 多 主 A C nr l e e r ) oe A w
超 声 波 测 距 仪 的 设 计
维普资讯
车 辆 与 动 力 技 术
20 07矩
空气 中的速度 ,温度 的变化 .
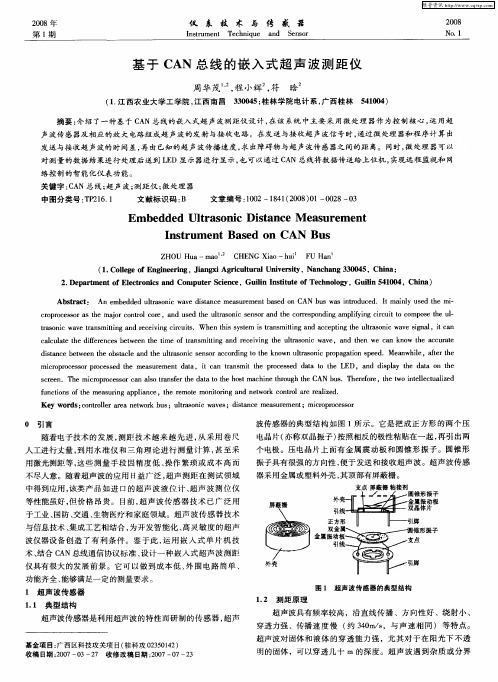
图 1 测 距 原 理 图
12 测距 仪声 波信号 发生器 的 电路 设计 .
超声 波发生 探头 ( 又称 “ 超声 波换 能器 ” 的型 ) 号选用 C B 0 .可采 用 软 件发 生 法 和 硬件 发 生 法 S4 T
图 2 测距仪声波信号发生 电路
产 生 超声波 .前 者利 用 软 件 产生 4 H 0k z的超 声 波 信 号 ,通过输 入 引脚 输入 至驱 动器 ,经驱 动器驱 动
后推 动探 头产生 超声 波.这 种方 法 的特 点是充 分利
Absr t:A lr s ni a g fn e s wa d o h s k f a odig b rir , wh c s g ig t e tac u ta o c r n ei d r s ma e fr t e a e o v i n a re s i h i on o b u e r i e l e l de e il . T e s fwa e a d h r wa e’S e i n o he r n e n e r nr — s d f ntli ntgui d v h ce o g h ot r n a d r d sg f t a g f d r ae i to i d c d.Th ue e CAN— uswa p le ot e r n e n e ni .Th b sa p i d t h a g f d ru t i s e CAN o swee d sg e rt e c mmu n de r e in d f h o o —
基于单片机的超声波测距系统的设计

基于单片机的超声波测距系统的设计
超声波测距系统是一种常见的测距技术,它利用超声波的特性来测量物体与传感器之间的距离。
基于单片机的超声波测距系统是一种常见的应用,它可以广泛应用于工业自动化、智能家居、机器人等领域。
基于单片机的超声波测距系统主要由超声波传感器、单片机、LCD 显示屏和电源等组成。
超声波传感器是测距系统的核心部件,它可以发射超声波信号并接收反射回来的信号。
单片机是控制系统的核心部件,它可以对传感器发射的信号进行处理,并计算出物体与传感器之间的距离。
LCD显示屏可以显示测量结果,方便用户进行观察和操作。
在设计基于单片机的超声波测距系统时,需要注意以下几点:
1.选择合适的超声波传感器。
传感器的频率和探测距离是选择传感器时需要考虑的重要因素。
2.选择合适的单片机。
单片机的处理速度和存储容量是选择单片机时需要考虑的重要因素。
3.编写合适的程序。
程序需要能够对传感器发射的信号进行处理,并计算出物体与传感器之间的距离。
同时,程序还需要能够将测量结果显示在LCD显示屏上。
4.进行系统测试。
在完成系统设计后,需要进行系统测试,确保系统能够正常工作,并且测量结果准确可靠。
基于单片机的超声波测距系统具有测量精度高、响应速度快、体积小等优点,可以广泛应用于各种领域。
在未来,随着技术的不断发展,基于单片机的超声波测距系统将会得到更广泛的应用。
PIC单片机在超声波测距系统中的应用
0 引 言
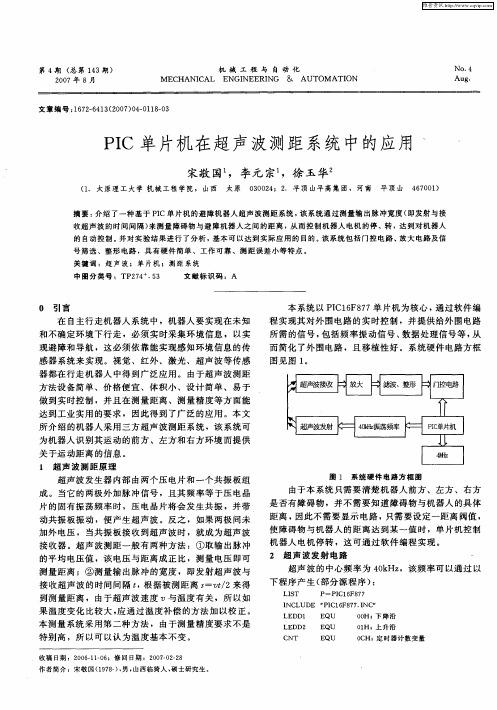
本 系统 以 P C 6 8 7单 片机 为核 心 , 过软 件编 I 1F 7 通 程 实现 其对 外 围 电路 的实 时控 制 ,并提 供给 外 围电路 所 需 的信 号 , 包括 频 率振 动 信号 、 数据 处理 信号 等 , 从
的 自动 控 制 。 对 实 验 结 果 进 行 了 分 析 , 本 可 以 达 到 实 际 应 用 的 目 的 。 系 统 包 括 门 控 电 路 、 、整形 电路 ,具有 硬件简单 、工作可靠 、测距 误差小等特点 。
关 键 词 :超 声 波 ;单 片机 ;测 距 系统
所介 绍 的机器 人 采用 三方 超声 波测 距 系统 ,该 系统 可
为机 器人 识别 其运 动 的前 方 、左方 和右 方环 境 而提供
关 于运 动距离 的信 息 。
1 超 声 波测 距原 理
超声 波发 生器 内部 由两个 压 电片和 一个 共振 板 组
图 1 系统 硬 件 电 路 方 框 图
感器 系统 来实 现 。视 觉 、红外 、激 光 、超声 波 等传感 器都 在行 走机 器人 中得到 广泛 应用 。由于超 声 波测 距 方法 设备 简单 、价 格便 宜 、体 积小 、设计 简 单 、易 于 做 到实 时控制 ,并 且 在测 量距 离 、测量 精度 等 方面 能 达到 工业 实用 的要 求 ,因此得 到 了广泛 的应 用 。本 文
机 器人 电机停 转 ,这 可通 过软 件 编程 实现 。
2 超 声 波发射 电路 一
测量 距离 ;② 测 量输 出脉 冲 的宽度 ,即发射 超 声波 与
接 收超 声波 的时 间 间隔 t 根 据 被测 距离 s t2来 得 , =v/ 到测 量距 离 ,由于超声 波 速度 与 温度 有关 ,所 以如
基于单片机控制的超声波测距系统的设计

基于单片机控制的超声波测距系统的设计一、概述。
超声波测距技术是一种广泛应用的测距技术,它能够非常精确地测量物体到传感器的距离。
本文介绍的基于单片机控制的超声波测距系统主要由控制模块、信号处理模块和驱动模块三部分组成。
其中,控制模块主要实现超声波信号的发射与接收,信号处理模块主要实现对测量结果的处理和计算,驱动模块主要实现对LED灯的控制。
二、硬件设计。
1.超声波发射模块:采用 SR04 超声波发射传感器,并通过单片机的PWM 输出控制 SR04 的 trig 引脚实现超声波信号的发射。
2.超声波接收模块:采用SR04超声波接收传感器,通过单片机的外部中断实现对超声波信号的接收。
3.控制模块:采用STM32F103单片机,通过PWM输出控制超声波发射信号,并通过外部中断接收超声波接收信号。
4.信号处理模块:采用MAX232接口芯片,将单片机的串口输出转换成RS232信号,通过串口与上位机进行通信实现测量结果的处理和计算。
5.驱动模块:采用LED灯,通过单片机的GPIO输出控制LED灯的亮灭。
三、软件设计。
1.控制模块:编写程序实现超声波信号的发射与接收。
其中,超声波发射信号的周期为 10us,超声波接收信号的周期为 25ms。
超声波接收信号的处理过程如下:(1)当 trig 引脚置高时,等待 10us。
(2)当 trig 引脚置低时,等待 echo 引脚为高电平,即等待超声波信号的回波。
(3)当 echo 引脚为高电平时,开始计时,直到 echo 引脚为低电平时,停止计时。
(4)根据计时结果计算物体到传感器的距离,将结果通过串口输出。
2.信号处理模块:编写程序实现接收计算结果,并将结果通过串口与上位机进行通信。
具体步骤如下:(1)等待串口接收数据。
(2)当接收到数据时,将数据转换成浮点数格式。
(3)根据测量结果控制LED灯的亮灭。
以上就是基于单片机控制的超声波测距系统的设计。
该系统能够通过精确测量物体到传感器的距离并对测量结果进行处理和计算,能够广泛应用于各种实际场合。
基于单片机的超声波测距(毕业设计任务书)

注:1.课题类型:工程设计、技术开发、软件工程、理论研究和方法应用、管理模式设计等2.课题来源:教学、科研、生产、实验、假拟、其他毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解**学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。
图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画3)毕业论文须用A4单面打印,论文50页以上的双面打印4)图表应绘制于无格子的页面上5)软件工程类课题应有程序清单,并提供电子文档5.装订顺序1)设计(论文)2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订3)其它毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
基于CAN总线的智能超声波测距车载系统

方法相 比,它不受光照 、电磁波等外界因素影 响 ,测 量过程 比较 迅速 方便 、计算 简单 ,价格 低廉 。然 而
Ab t a t P e e t a i d ao xe d n l a o i it n eme s rm e t t N u di to c sakn f sr c : r sn sab sci e f tn i gu t s ncd sa c a u e n hCA b sa r du e i do e r wi n n CA N u —a e tl g n l a o i itn em e s rm e t e iu a tm .nwhc b sb s di el e t t s ncd sa c a u e n h c lr yse i ihAT8 C5 tie ir c n olr n i u r v s 9 2i u lz da m c o o t l . s i s r e
S A l 0 steb sc n o lra d8 C2 0 a h J 0 0a u o t l n 2 5 st eCAN a s e v r Th r p s du ta o i itn em e s r m e t y tm h r e t n c ie . ep o o e l s ncd sa c a u e n se r r s e c l r ia yo e n smp iy n h r ft es se ’ c ben t sc r n h a d re d sg . t a l s v x e so dn r n si i lf i gt ewo ko y tm S y r e i o ea d t eh r wa e i n I m y wel a e h c
基于单片机的超声波测距仪的设计毕业设计论文
摘要超声波具有很强的指向性,消耗能量缓慢,距离传播较远等优点,所以,在利用自动化控制技术和传感器应用技术相结合的测距方案中,利用超声波专有特性测距是目前最普遍的一种方式,它被广泛地应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。
本论文详细的介绍了超声波传感器的原理及特性,并且介绍了Atmel公司的AT89C52单片机的性能与特点,且在分析了超声波测距原理的基础上,指出了本次方案的思路和所需考虑的问题,给出了以AT89C52单片机为核心,LCD显示电路,硬件制作和软件设计为一体的设计方案。
矚慫润厲钐瘗睞枥庑赖。
关键字:超声波测距;单片机;测距;AT89C52;LED显示屏AbstractUltras onic wave has strong poin ti ng to n ature ,slowly en ergy con sumpti on ,propagat ing dista nce farther ,so, in utiliz ing the scheme of dista nce finding that sen sor tech no logy and automatic con trol tech no logy comb ine together ,ultras onic wave finds range to use the most gen eral one at prese nt ,it applies to guard aga inst theft , move backward the radar , water level measuri ng , buildi ng con structi on site and some in dustrial sce nes exte nsivel聞. 創沟燴鐺險爱氇谴净。
This subject has introduced principle and characteristic of the ultrasonic sensor in detail ,and the performa nce and characteristic of on e-chip computer AT89C52 of Atmel Company ,and on the basis of analyzing principle that ultrasonic wave finds range ,the systematic thi nking and questi ons n eeded to con sider that have poin ted out that desig ns and finds range .Given the AT89C52, LCD display circuit, the hardware and the software desig n productio n残骛楼諍锩瀨濟溆塹籟。
基于CAN总线的智能超声波测距系统

基金项目:北京市教育委员会科技发展计划面上项目(KM200611232002)收稿日期:2007-02-18 收修改稿日期:2007-07-29基于CAN 总线的智能超声波测距系统童 亮(北京信息科技大学机电工程学院,北京 100085) 摘要:介绍一种以MicrochipPIC16F877A 微控制器、MCP2510独立CAN 总线控制器和PCA82C250收发器为核心组成的CAN 总线智能超声波测距系统及其硬件和软件的设计方法。
在分析超声波测距误差原因的基础上,为了提高系统的测量精度,增加了超声波测距系统的温度校正模块。
试验结果表明:该测量系统测量数据准确、精度高,数据传递效率和利用率高,能够满足分布式控制系统中相关距离测量和数据传输的要求。
关键词:CAN 总线;超声波测距;温度校正;单片机中图分类号:TP302 文献标识码:A 文章编号:1002-1841(2007)12-0034-03IntelligentUltrasonicDistanceMeasurementSystemBasedonCANBusTONGLiang(InstituteofMechanicandElectronicEngineering,BeijingInformationScienceandTechnologyUniversity,Beijing100085,China)Abstract:AnapproachofhardwareandsoftwareforintelligentultrasonicdistancemeasurementsystembasedonCANbuswith PIC16F877A,stand 2aloneCANbuscontrollerMCP2501andPCA82C250wasintroduced.Thetemperaturecorrectingmodulewasprovided forimprovingtheprecisionofmeasurementsystemaccordingtoanalyzingtheerrorreasonofultrasonicdistancemeasurement.Theexperi 2mentresultshowsthatthedistancedatameasuredbythesystemwasaccurate,theefficiencyofdatatransmissionishighandthedatamea 2suredandtransferredbythesystemcanmeettherequirementofdistributedcontrolsystemaccordingly.Keywords:CANbus;ultrasonicdistancemeasurement;temperaturecorrection;MCU 1 系统设计原理和总体结构超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物立即返回,超声波接收器收到反射波后立即停止计时。
基于单片机控制的超声波测距警报系统设计2
《现代通信技术》专业课程设计基于单片机控制的超声波测距报警系统设计系部:电子与信息工程系专业班级:学生:学号:小组成员:指导教师:时间:完成时间 2010年 12月目录1 绪论 (1)2 总体设计方案 (2)2.1 课程设计的任务与要求 (2)2.1.1 课程设计的任务 (2)2.1.2 课程设计的要求 (3)2.2 超声波测距原理 (3)2.3 超声波测距系统的总体方案 (4)3 系统硬件电路设计 (6)3.1 STC89C52芯片介绍 (6)3.2 单片机最小系统 (6)3.3 超声波模块 (8)3.3.1 超声波发射模块 (8)3.3.2 超声波接收模块 (8)3.4 LED数码管显示模块 (9)3.5 报警模块 (10)4 系统软件设计 (11)4.1 Keil uVision3软件介绍 (11)4.2 软件流程图 (11)4.3 系统的软件调试 (12)5 设计总结 (14)参考文献 (15)附录 (16)附录1 硬件连接图 (16)附录2 程序清单 (16)1 绪论随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
例如,倒车雷达、交通测速、机器人障碍检测等。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术与产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
浅谈基于CAN总线的超声波测距单元设计

将 超 声 波 应 用 于 距 离 检 测 。 有 准 确 性 高 、 能 具 性 可 靠 、 护 方 便 等 优 点 。 国 外 应 用 广 泛 。 CAN 总 维 在 线 全 称 C n r l r e t r 即 控 制 器 局 域 网 , o t l aNewo k, o e Ar 是 当前世 界上 最 流 行 的 现场 总线 之 一 。将 C AN 总 线应 用于 超 声波 测距 单元 的设 计 , 以利用其 高速 、 可
制 目的 。
超 声 波 的 速 度 v与 温 度 相 关 , 气 中 的 声 速 与 空 温度 的关系 可表 示 为 :
超 声 波 发 射 电路 为 发 射 探 头 提 供 一 组 1 O个 左 右的 4k 0 Hz脉 冲 串 。 种 脉 冲 串 大 约 每 隔 l O 这 O ms左 右 发射 一次 。 测 一次 发 射脉 冲 和 回波 的时 间差 , 每 即
生 产 的 符 合 C N2 0 标 准 的 独 立 总 线 控 制 器 , A .B 目 前 应 用 十 分 广 泛 。 系 统 组 成 如 图 l:
; “ l
一
0 Ig【 S H 2 )I
超 声波 为直 线传 播 。 率 越 高 , 绕 射 能 力越 弱 , 频 则 反 射 能 力 越 强 。 最 常 用 的 超 声 波 测 距 方 法 为 渡 越 时 间
维普资讯
科技与经济 26 第7 0年 期 0
避 砸 羽叼晖 砸 嗨
浅 谈基 于 C AN 总 线 的超 声波 测 距 单元 设 计
基于PIC单片机的嵌入式CAN智能节点及其与PC的通信

程序需要对PIC16F874单片机。显示模块。I/O扩展芯片8255和CAN控制器MCP2510进行初始化。其中对MCP2510初始化是非常重要的,主要包括设置数据传输的波特率,将标识码和屏蔽字写入CAN信息接收过滤和屏蔽控制寄存器。对PIC16F874进行初始化时,要特别注意定时器TMR2。
调试过程中应注意通过查看各个寄存器的值来判断程序执行的程度。
PC端
在编写PC端的程序时,需要将PCL-841双端口CAN接口卡驱动程序库CAN841S.LIB嵌入到自己的工程中,驱动程序库中封装了直接操控CAN接口卡的函数。对CAN接口卡进行操控时必须按照规定流程进行,否则CAN接口卡无法正常工作或者无法正确的发送和接收CAN信息。
硬件设计
Microchip公司的单片机PIC16F874采用RISC指令系统,哈佛总线结构,低功耗,高速度。内部集成了ADC.串行外围接口(SPI)和Flash程序存储器等,具有PWM输出。LCD驱动等功能。PIC16F874通过SPI接口可以实现与CAN控制器MCP2510的无缝连接。PIC16F874的I/O资源丰富,共有A.B.C.D.E五个I/O口,每个I/O口除了基本用途外还有一些特殊功能。
PIC16F874通过SPI与CAN控制器MCP2510连接,其串行数据输入(SDI)脚与MCP2510的SO脚相连,其串行数据输出(SDO)脚与MCP2510的SI脚相连,其串行时钟(SCK)脚与MCP2510的SCK脚相连。MCP2510的复位信号。片选信号由单片机A口的RA5.RA2提供,MCP2510的中断信号。接收缓冲区满中断信号输出到单片机B口的RB0.RB5。
软件部分
PC端的软件采用C语言编写,主要完成CAN信息的实时读龋处理和显示,向嵌入式CAN智能节点发送数据和设置嵌入式CAN智能节点PWM波输出的脉冲宽度等工作。
基于PCI总线的超声检测系统设计

( 北大 学 , 西 太 原 005 ) 中 山 30 1
摘
要: 随着科技 的发展 , 工业上对工件 和材料 的要求越来越高 , 对作 为无损检测重 要分支 的超声 检测技术 的检测效率 和检测精度 提出 了更 高的要
求 。本文基于超声卡和高速采集卡设计 了一种超声检测系统 。硬件系统是通过超声卡发射超声信号 , 用 A 使 D采样 , 利用 P ] C 总线进 行传输 ; 软件系 统基于 V 60软件平 台设计上位机程序。最后 系统对标准件进行实验 , C. 结果表明本文设计 的系统 能够准确 显示工件 的超 声信号和 保存 数据 , 在相 并
剐 襄 : 于P /总线 的超 声 检 翻 系统 设 计 基 C
基 于 P I 线 的 超 声 检 测 系统 设 计 C 总
T eDein o la o i T s n y t B sdo C s h s f Ut snc et g S s m ae nP IBu g r i e
系统 选取 的是 5 Z MH 。
软件 来存储 全部 回波 信 息 , 能够 提 供 超 声 信号 的位 置 和 幅值 特征 , 并且 可 以回放 和保 存 回波信 号 , 后期 数字 信 为
号处 理 的研 究奠 定基础 。
() 3 晶片尺寸 。探 头 的晶片 尺寸对 近场 区长度 、 向 指 性及 远距 离缺 陷 的检 测 能力 影 响很大 , 一般 直径 在 (0— 1 3 ) m之 间 , 0m 系统需要 检 测 的是 大 曲率工 件 , 为提 高检测
以实 现采样 深度 以及延 迟 时间 的调整 。
2 1 超声探 头 的选 择 : 超 声 检测 中 , 声 探 头 的选 择 . 在 超 是首先 要考 虑 的问题 , 对 超声 检 测 效果 的好 坏 起着 重 它 要的作用 。探 头 的选 择一 般 从 型式 、 率及 晶 片尺 寸 等 频
基于CAN网络的超声波测距模块设计

2 1 年 1 月 00 O压电与声光
V o132 NO. . 5 0c . 2 0 t O1
P EZ I OELEC TRI S & AC0US ) TI C T( OP CS
文章 编 号 :0 4 2 7 ( 0 0 0 — 8 4 0 1 0 - 4 4 2 1 ) 50 7 4
ta o i s n o r a o i i gCAN u o r s n c e s ra r y c mb n n b sc mm u ia in wa r s n e . ewo k n rn i l n e i n me h do n c t sp e e t d Th r i g p i cp e a d d s t o f o g
心 ,C 2 2 0收发 器 与 超 声 波 传 感器 阵列 相 结 合 , 现 基 于 C N 总线 通 信 的超 声 波 测 距 系 统 , 给 出 了 工 作 原 P A8C 5 实 A 并
理及 软硬 件 设 计 方 法 。此 外 , 温度 补 偿 模 块 修 正 超 声 波传 递 误 差 , 高 系统 测 量 精 度 。实 验 表 明 , 系 统 具 有 测 用 提 该 量数 据 准 确 , 度 高 , 精 数据 传 递 效 率 和 利 用率 高等 优 点 。能 有 效应 用 于 障碍 物 测 量 中 。
基 于 C N 网络 的超 声 波 测 距 模 块 设 计 A
毛建 国, 芳培 , 李 沈 岖 , 华鹏 , 方 超 , 周 柏 李 忠
( 京航 空 航 天 大 学 能 源 与 动 力学 院 , 苏 南 京 2 0 1 ) 南 江 1 0 6
摘
要 : 碍 物规 避 是 智 能 车 辆 和 移 动 机 器 人 领 域 的 重 要 研 究 内 容 之 一 。本 设 计 以 C 0 1 0 0单 片机 为 核 障 85F 4
基于PIC单片机的超声波测距系统

收稿日期:2003211210作者简介:何莉(19712),女,四川达县人,讲师,主要从事应用电子技术教学和科研究工作。
文章编号:100422474(2004)022*******基于P I C 单片机的超声波测距系统何 莉1,曾宪文2,徐 霞1(11重庆工学院电子信息与自动化学院,重庆400050;21重庆大学机械传动国家重点实验室,重庆400044) 摘 要:针对普通超声波测距系统抗干扰能力一般,该文介绍了一种由P I C 16F 876单片机控制的实时超声波测距系统,电路主要采用COM S 集成芯片且给予了温度补偿,其抗干扰能力强,测距频率达20H z 。
并用于汽车安全系统能实时监测车身侧面与障碍物之间的距离,满足了汽车侧面实时防撞的要求。
关键词:超声波;测距;实时性;P I C 16F 876单片机中图分类号:T P 212 文献标识码:BUltra son i c D ist ance M ea sure m en t I n stru m en t Ba sedon P I C M onol ith i c M ach i n eHE L i 1,ZENG X i a n -wen 2,XU X i a1(11D ep t 1of E lectronic Engineering ,Chongqing Institute of Technol ogy ,Chongqing 400050China ;21State Key L ab 1of M echanical T rans m issi on ,Chongqing U niversity ,Chongqing 400044,China ) Abstract :Comparing w ith the an ti 2jamm ing capacity of common ultras on ic tele m eter syste m ,th is article in tro 2duces a real 2ti m e syste m of ultras on ic distance m easure m en t in strum en t w h ich w as con tro lled by P I C 16F 876SC M 1T he circuit adop ts in tegrated COM S ch i p te mperature compen sati on ,w h ich has better an ti 2jamm ing capacity 1T he frequency of the tele m eter is up to about 20H z and the syste m can in s pect the distance betw een the bodywo rk flank and the roadbl ock in real ti m e ,w h ich can satisfy the requir m en t of real 2ti m e an ti 2crash of bodywo rk’s.Key words :ultras on ic ;distance m easuring ;real 2ti m e perfo r m ance ;P I C 16F 876SC M1 引言超声波测量技术是一种非接触式的测量方法。
基于PIC18F2580的CAN总线超声波测距智能节点设计

基于PIC18F2580的CAN总线超声波测距智能节点设计1 引言移动机器人要实现在不确定环境下运行,必须具备自动导航和避障功能。
在移动机器人的导航系统中,传感器起着举足轻重的作用。
视觉、激光、红外、超声传感器等都在实际系统中得到了广泛的应用。
其中,超声波传感器以其信息处理简单、速度快和价格低,被广泛用作移动机器人的测距传感器,以实现避障、定位、环境建模和导航等功能。
本文介绍的CAN 总线智能节点的设计以Microchip 公司的PIC18F2580 控制核心。
由于PIC18F2580 有片上自带的CAN 控制器并且为CAN 的应用提供了许多专用的硬件功能,因此又将它作为了系统的CAN 总线控制器,大大节省了主控系统的资源。
CAN 总线的收发器采用TJAl040。
系统总体结构框图如图1 所示。
图1 系统总体结构框图机器人系统控制核心由ARM 或DSP 实现。
其主要功能是处理需要复杂计算的信息,将经过处理的信息再送回CAN 总线,并对整个网络进行管理。
超声波智能节点控制系统的主要功能就是判断障碍物位置,将对移动机器人前进方向有阻碍的障碍物信息通过CAN 总线传回主控系统,由主控系统作出相应处理并进行避障动作。
本文将着重介绍超声波智能节点控制系统。
2 超声测距原理超声测距的原理较简单,一般采用渡越时间法,即:D=ct/2 (1)其中D 为移动机器人与被测障碍物之间的距离,c 为声波在介质中的传输速率。
声波在空气中传输速率为:c= co(2)其中,T 为绝对温度,co =331.4m/s。
在不要求测距精度很高的情况下,一般可以认为c 为常数。
渡越时间法主要是测量超声发射到超声返回的时间间隔t,即“渡越时间”,然后根据式(1)计算距离。
3 超声波智能节点控制系统的硬件设计超声波智能节点控制系统的硬件电路如图2 所示。
3.1 控制电路超声波传感器的控制部分采用Microchip 公司生产的PIC18F2580。
基于CAN总线通信的汽车超声波测距仪设计

江西理工大学文档题目基于CAN总线通信的小车超声波测距仪设计与制作专业自动化092 作者姓名邓同龙导师姓名刘晖、张振利基于CAN总线通信的小车超声波测距仪设计与制作目录摘要 (3)关键词 (3)1.超声波测距的工作原理与方式 (4)1.1工作原理 (4)1.2工作方式 (4)1.3超声波传感器的硬件设计 (5)1.3.1发射电路分析 (5)1.3.2接收电路分析 (6)2.CAN 总线通信系统设计 (8)2.1超声波测距仪通信系统的总体设计 (8)2.2超声波测距仪通信系统节点的硬件设计 (9)2.3 超声波测距仪通信系统的软件设计 (10)2.3.1.CAN节点初始化 (10)2.3.2信号的发送 (12)2.3.3.信号的接收 (13)3.总结 (14)4.参考文献 (16)摘要随着汽车网络技术和电子信息技术的发展,CAN总线作为一种局域网控制技术,在汽车上的应用越来越广泛。
它不但大大简化了线束,而且为电控单元之间得信息共享提供了方便得平台。
本文在研究了CAN总线得原理和节点的设计后,以实验室的小车作为研究对象,为其设计了超声波测距仪作为避障单元:并将CAN总线应用在小车上,建立了测距系统的局域网,制作了一套相应可靠的运行协议,实现了节点间的通信。
通过研究,证明了CAN总线在小车引导车上有着很强的实用性和适用性,为CAN总线在其它领域的应用做出了一些有益的探索。
关键词CAN总线控制超声波测距仪通信1.超声波测距的工作原理与方式1.1工作原理超声波的发展历史大概有100年左右。
由于它具有许多独特的优点,因此在其发现不久就得到了许多应用,并迅速地发展成为一门新兴的边缘学科一超声学首先,在理想的条件下,即忽略声速随温度、空气密度、湿度等的变化,我们再来拷问关于超声波测距的原理。
传统的讲,超声波是指频率大于20KHz得机械波。
为了以超声波作为检测手段,必须产生超声波和接收超声波。
完成这种功能得装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。
一种基于PIC单片机的测距系统

收稿日期:2011-06作者简介:常玉华(1979—),女,硕士,研究方向为电气自动化、自动化控制、测控与信号。
一种基于PIC 单片机的测距系统常玉华,姚存治(郑州铁路职业技术学院,河南郑州450052)摘要:介绍一种基于PIC 单片机控制的超声波测距系统,详细阐述了其硬件及软件的设计原理。
该系统硬件结构简单、工作可靠、有良好的测试精度和灵敏度,可用于汽车倒车防撞装置、移动机器人、建筑工地及一些工业现场的位置监控,也可以用于液位、井深、管道长度等场合的测量。
关键词:超声波;测距;控制中图分类号:TM930.9文献标识码:A文章编号:1006-2394(2011)09-0040-03An Ultrasonic Distance Measurement System Based on PIC MicroprocessorCHANG Yu-hua ,YAO Cun-zhi(Zhengzhou Railway Vocational and Technical College ,Zhengzhou 450052,China )Abstract :A supersonic range finding system based on PIC chip computer is discussed in this article ,and the princinple of hardware and software design is described in detail.The system has simple hardware circuit ,good measur-ing precision ,sensitivity ,and can work reliably.So it can be used for motor vehicle collision ,mobile robot ,building site ,and measure of liquid place ,depth of well ,length of piping.Key words :ultrasonic ;distance testing ;control 使用超声波方式实现测距与红外线、激光等方式相比,它不受光线、被测对象颜色等影响;并且,由于超声波可以实现非接触的检测,所以,对于测量环境处于黑暗、有灰尘、烟雾、有毒等恶劣的环境下也可以正常使用。
基于CAN总线的移动机器人超声波测距模块标准化设计
基于CAN总线的移动机器人超声波测距模块标准化设计董改花;孙荣川;孙立宁;郭秀华【摘要】面向当前移动机器人平台模块化及通用接口标准化发展的迫切需求,以TMS320F2812 DSP芯片增强型eCAN为核心,对移动机器人常用的超声波测距模块进行通用标准化CAN口设计。
主要包括eCAN标准化接口硬件电路设计及超声波信号处理流程等。
试验结果证明,本超声波测距模块标准化接口工作可靠,实时性好,满足控制要求,能与上位机通过CAN总线实现即插即用,已经成功应用于移动机器人控制系统中。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)008【总页数】4页(P41-44)【关键词】超声波测距;标准化接口;DSP芯片;CAN总线;移动机器人【作者】董改花;孙荣川;孙立宁;郭秀华【作者单位】苏州经贸职业技术学院SOC研发中心,苏州 215009; 苏州大学机器人与微系统研究中心,苏州 215000;苏州大学机器人与微系统研究中心,苏州215000;苏州大学机器人与微系统研究中心,苏州 215000;苏州经贸职业技术学院SOC研发中心,苏州 215009【正文语种】中文【中图分类】TP336对周围障碍物距离地不断测量构建环境的二维或三维信息是移动机器人构建环境地图、实现路径规划、自主导航定位与实现避障的先决条件[1]。
超声波传感器以其简单方便、成本低等优点,以及在测量精度方面完全能够达到工业实用要求,所以在移动机器人研制上受到了人们越来越多地青睐。
目前市场上超声波传感器种类繁多,其输出接口信号不一致,没有统一标准,导致传感器之间无法实现互操作及即插即用[2]。
就最终使用用户而言,面临着重复投入及二次开发问题。
这样使得移动机器人研究设计人员得花费大量的时间精力在底层传感器及驱动执行器的硬件接口通信上,很大程度上延长了研究周期,增加了研究成本。
2015年5月,国务院发布《中国制造2025》规划,机器人作为该战略部署的十个重点发展领域之一,其中指出要想突破机器人技术瓶颈,机器人设计标准化、模块化发展是今后趋势[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
移动机器人要实现在不确定环境下运行,必须具备自动导航和避障功能。在移动机器人的导航系统中,传感器起着举足轻重的作用。视觉、激光、红外、超声传感器等都在实际系统中得到了广泛的应用。其中,超声波传感器以其信息处理简单、速度快和价格低,被广泛用作移动机器人的测距传感器,以实现避障、定位、环境建模和导航等功能。本文介绍的CAN总线智能节点的设计以Microchip公司的PIC18F2580控制核心。由于PIC18F2580有片上自带的CAN控制器并且为CAN的应用提供了许多专用的硬件功能,因此又将它作为了系统的CAN总线控制器,大大节省了主控系统的资源。CAN总线的收发器采用TJAl040。系统总体结构框图。
CANH和CANL与地之间并联了两个30 pF的电容,可以过滤掉总线上的高频干扰和一定的电磁辐射。两根CAN总线接人端与地之间分别反接了一个保护二极管。当CAN总线有较高的负电压时,通过二极管的续流可起到一定的过压保护作用。总线两端接的120Ω电阻起匹配总线阻抗的作用,忽略掉它会使数据通信的抗干扰性能及可靠性大大降低甚至无法通信。
图5 超声波测距软件流程图
4.2 CAN总线通信部分的软件编写
这部分软件编写主要由以下几部分组成:初始化、接收处理、发送处理、中断处理及错误处理函数。由于系统中任意节点在任意时刻均可主动与其它节点通信,故各个节点通信程序大致相同。具体程序的编写可参考PIC18F2580的用户手册。
5 结束语
3 超声波智能节点控制系统的硬件设计
超声波智能节点控制系统的硬件电路。
3.1 控制电路
超声波传感器的控制部分采用Microchip公司生产的PIC18F2580。它是一个单片8位高性能微控制器,采用了哈佛总线结构,运行速度高,功耗低,抗干扰能力强,具有片内CAN控制器。
作为系统控制核心,PIC18F2580担负两个主要任务。其一是作为超声波传感器的控制核心,在其普通I/O口上扩展了超声波传感器的接收和发射部分电路,利用单片机软件功能产生40 kHz信号并通过驱动放大发射出去,再利用接收部分电路进行接收。另外可以对其余口线继续进行超声波传感器的扩展,实现多个超声波传感器系统的设计。其二是利用PIC18F2580的片内CAN控制器实现与CAN总线的连接。这样的设计改变了过去在机器人控制核心上进行超声波测距系统的设计,不但将超声波检测与处理的工作转移到了单片机上,大大节省了机器人控制核心的系统资源,还将CAN总CAN总线的采用大大提升了系统的抗干扰能力,使机器人控制系统更加稳定地工作。
3.4 CAN总线设计部分
TJAl040是Philips半导体公司生产的高速CAN总线收发器。该器件提供了CAN协议控制器和物理总线之间的接口,以及对CAN总线的差动发送和接收功能。TJAl040具有优秀的EMC性能,而且在不上电状态下有理想的无源性能;它还提供低功耗管理,支持远程唤醒。值得一提的是TJAl040的自动防故障功能。STB引脚接地工作在正常模式下,引脚TXD提供了一个向VCC的上拉,使引脚TXD在不使用时保持隐性电平。如果VCC掉电,引脚TXD、STB和RXD就会变成悬浮状态,防止通过这些引脚产生反向电流。
2 超声测距原理
超声测距的原理较简单,一般采用渡越时间法,即: D=ct/2
(1) 其中D为移动机器人与被测障碍物之间的距离,c为声波在介质中的传输速率。声波在空气中传输速率为: c= co
(2) 其中,T为绝对温度,co =331.4m/s。在不要求测距精度很高的情况下,一般可以认为c为常数。渡越时间法主要是测量超声发射到超声返回的时间间隔t,即“渡越时间”,然后根据式(1)计算距离。
图2 测距节点控制电路图 3.2 超声波传感器发射电路设计
图3 超声波发射部分电路图
图3中,LM386是一种音频集成功放,具有自身功耗低、电压增益可调整、电源电压范围大、外接元件少和总谐波失真小等优点,广泛应用于录音机和收音机之中。它是一个三级放大电路。本部分硬件电路相对简单,主要就是利用LM386的驱动放大功能将单片机产生的40 kHz方波放大输出。因为在智能超声波节点控制系统中单片机的工作相对较少,为节省硬件,不妨将40 kHz方波的产生这部分工作交由单片机的模块来完成。TX1为超声波发射头。
3.3 超声波传感器接收电路设计
电路采用集成电路CX20106A。这是一款红外线检波接收的集成电路,常用于电视机红外遥控接收器。考虑到红外遥控常用的载波频率38 kHz与测距超声波频率40 kHz较为接近,可以利用它作为超声波检测电路。实验证明,其具有很高的灵敏度和较强的抗干扰能力。适当改变C11的大小,可改变接收电路的灵敏度和抗干扰能力。R12和C11控制CX20106A内部的放大增益,R14控制带通滤波器的中心频率。一般取R12=4.7Ω,C11=1μF。其余元件按图4取值。RX1为超声波接收头,当收到超声波时产生一个下降沿,接到单片机的外部中断INTO上。
图4 超声波接收部分电路图
当超声波接收头接收到40 kHz方波信号时,将会将此信号通过CX20106A驱动放大送入单片机的外部中断0口。单片机在得到外部中断0的中断请求后,会转入外部中断0的中断服务程序进行处理,在移动机器人的避障工作中,可以在中断服务程序设定需要单片机处理的最短距离,比如0.4m。对于距离大于0.4 m的障碍物,可以不做处理直接跳出中断服务程序;对于距离小于或等于0.4m的障碍物信息,则在中断服务程序中进行处理并通过CAN总线上报机器人系统控制核心,由机器人系统控制核心发出命令指导机器人的避障动作。对于多超声波传感器系统,每一个超声波传感器在判断到对机器人行动有障碍物时可分别在其中断服务程序中对障碍物信息进行简单处理,上报给机器人系统控制核心的信息可以相对简单,只需机器人系统控制核心控制机器人的实际动作,比如右转20°,而不必机器人系统控制核心再次进行计算,这样会节省大量系统资源去作其它更为复杂的工作。
图1 系统总体结构框图
机器人系统控制核心由ARM或DSP实现。其主要功能是处理需要复杂计算的信息,将经过处理的信息再送回CAN总线,并对整个网络进行管理。超声波智能节点控制系统的主要功能就是判断障碍物位置,将对移动机器人前进方向有阻碍的障碍物信息通过CAN总线传回主控系统,由主控系统作出相应处理并进行避障动作。本文将着重介绍超声波智能节点控制系统。
4 超声波智能节点控制系统的软件编写
软件的编写工作主要有两个部分:超声波测距部分和CAN总线的通信部分。
4.1 超声波测距部分的软件设计
当超声波接收器接收到回波时,硬件电路产生脉冲电平触发PIC18F2580的外部中断0口。软件编写的主要思想是,在中断服务程序中由寄存器预先设定一个数值,这个数值是机器人避障的最短距离。从超声波发射头发射方波开始,到超声波接收头接收到回波为止,把这段时间换算成为距离,与上述最短距离相比较。如大于最短距离,则不作处理,跳出中断服务程序;如等于或小于最短距离,则执行相应动作。图5是这部分程序的流程。
本文论述了以CAN总线扩展多路超声波传感器的基本思想,介绍了一种以Microchip公司PIC18F2580作为超声波传感器控制核心及CAN总线控制器。以TJAl040作为CAN总线收发器的CAN总线智能超声波测距系统。将多路超声波传感器的扩展转移到智能节点部分上完成,简化了移动机器人系统控制核心的工作;采取了比较简单的硬件设计,主要是将超声波传感器的控制核心和CAN总线控制器集中到一起,采用PIC18F2580一个器件完成两种芯片的工作,节省硬件。另外,CAN总线的扩展也会令后续的移动机器人系统的进一步开发变得更为灵活。
6N137是光电耦合器,采用光电耦合器6N137的目的是增强CAN总线节点的抗干扰能力,这样的设计可以很好地实现总线上各CAN节点间的电气隔离。但要注意的是,光耦部分电路所采用的两个电源VCC和VDD必须完全隔离,否则光耦就失去了意义。
TJAl040作为CAN总线收发器,与CAN总线的接口部分也采取了抗干扰措施。TJAl040的CANH1和CANL1引脚各自通过一个5Ω电阻与CAN总线连接,电阻可以起到一定的限流作用,保护TJAl040不受过流的冲击。