机械创新设计ppt
合集下载
机械创新设计-绪论PPT课件

点评:构成我们学习的最大障碍是已知的东西,而不是 未知的东西。
编辑版pppt
42
(4)多向性
善于从多种不同角度考虑问题,是创新 设计的重要特征。
点评:有时换个方向考虑,会使前进的道路豁然开朗、 柳暗花明。
编辑版pppt
43
(5)连动性
创造性思维也是一种连动思维,它引导人 们由已知探索未知,开阔思路。连动思维包括 纵向、横向、逆向思维。纵向思维针对某现象 和问题进行纵深思考,探寻其本质而得到新的 启示。横向思维通过某一现象联想到特点与它 相似和相关的事物,从而发现新应用。逆向思 维针对现象、问题和解法,分析其相反的方面, 从另一角度探寻新的途径。
编辑版pppt
39
2.创新设计的特点
(1)独创性
独创性体现为敢于提出与前人、众人不同 的见解,敢于打破一般思维的常规惯例,寻找 更合理的新原理、新机构、新功能、新材料, 独创性能使设计方案标新立异,不断创新。
点评:发现问题、提出问题有时候比解决问题更重要!
编辑版pppt
40
(2)实用性
实用性体现在对市场的适应性和可生产 性两方面,创新设计的最终目的在于应用。
第一章 绪 论
第一节 创新与社会进步
1. 创新是人类文明进步的原动力 机械发展的历史是一部创新的历史。
指南车
地动仪
水碾
我国古代在机械研制方面有许多杰出的发明创造。
编辑版pppt
2
编辑版pppt
3
哈格里沃斯发明的 “珍妮纺纱机”
法国陆军技术军官古诺发明了世 界上第一辆蒸汽动力车
1898年问世的“雷诺”牌汽车
编辑版pppt
23
普通钳口工作面
适合平面刚性材料物体的夹持
机械创新设计ppt课件

2018/11/16
第五节
创新能力的构成
创新不需要天才,创新只在于找出新的改进方法。
创新能力的构成元素
•创新基础 •创新智能 •创新意识 •创新方法 •创新环境
2018/11/16
2018/11/16
2018/11/16
第六节
本课程的内容、性质和目的
1.本课程的内容 •机械设计的一般构成和创新人才的构成 •创新思维和技法(常用的创新方法) •机构的创新设计 •机械传动的创新设计 •机械系统创新设计介绍
2018/11/16
• 爱迪生为了找到适用的电灯灯丝材料,用 了6000多种植物纤维,试验了1600多种耐 热材料,终于发明制造出炭化灯丝的电灯 • 法拉第用长达18年的大量实验,发现了电 磁感应现象。 • 居里夫人在发现放射性元素之后,花了5个 多月时间,终于从一吨沥青铀矿中提炼出 了0.1克纯镭。
2018/11/16
2.本课程的性质和目的
2018/11/16
第七节
本课程的教与学
第八节 本课程的结业方式 平时考查成绩 创新作品成绩 创新作品例子
2018/11/16
第二章常用创新方法
第一节 到何处去搜寻题材 1. 向生活索取 • 活动合页
2018/11/16
• 两用拐杖
2018/11/16
• 拉链 • 尼龙搭扣 • 椅子转化为 躺椅、摇椅、转椅
2018/11/16
• 选不同构件为主动件,可得不同的应用。
农村水井打水的手动唧筒
2018/11/16
四杆机构
雨伞
2)引申 有别的东西像这件物品吗?是否可以从这 件物品引申设想出其他东西? • 港口用的起重机(双摇杆机构) • 飞机起落架(双摇杆机构)
机械创新设计ppt课件
应用“机构同性异形变换原理”,还可以演化出多种圆平动机构。它 的性能决定了平动齿轮传动的性能,所以每综合出一种圆平动机构,就得 到一种新型平动齿轮传动。
编辑版pppt
12
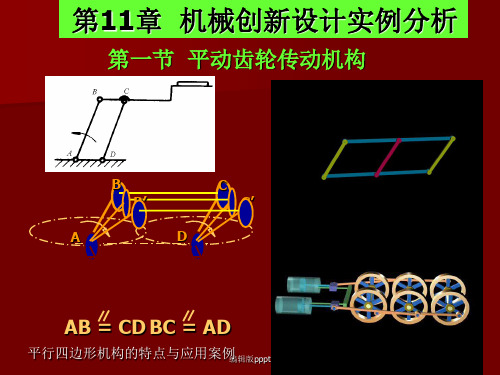
第一节 平动齿轮传动机构
2.用正弦机构实现齿轮圆平动 3.用孔销机构实现齿轮圆平动
应用“机构同性异形变换原理”,还可以演化出多种圆平动机构。它 的性能决定了平动齿轮传动的性能,所以每综合出一种圆平动机构,就得 到一种新型平动齿轮传动。
编辑版pppt
8
第一节 平动齿轮传动机构
内啮合平动齿轮传 动比的计算:
编辑版pppt
9
第一节 平动齿轮传动机构
1. 应用了平行四边形机构和齿轮机构的串
行连接;
平动齿轮创新设计方法总结: 2. 应用了三套机构的并行连接;
3. 应用了转动副的销钉扩大和尺寸变化等
编辑版演pp化pt 与变异设计。
10
第一节 平动齿轮传动机构
3. 效率高。 4. 体积大。
外齿轮
平行四边形机构与内啮合齿轮
编辑版pppt
机构II型串联组合I
3
第一节 平动齿轮传动机构
三环减速器(外平动齿轮减速 器)的特点:
i12
Z2 Z1 Z2
1. 当Z1和Z2相差不大时, 可实现大传动比传动;
2. 效率高; 3. 体积、重量大; 4. 高速运动时平稳性较差。
二.运动副的变异设计实例
设计压力机或钢板剪床
机构选择:曲柄滑块机构。 运动分析:位移较小。 受力分析:杆件BC受力很 大,运动副B和C受力很大。
编辑版pppt
17
第二节 机构应用创新设计案例分析
二.运动副的变异设计实例
设计压力机或钢板剪床
编辑版pppt
12
第一节 平动齿轮传动机构
2.用正弦机构实现齿轮圆平动 3.用孔销机构实现齿轮圆平动
应用“机构同性异形变换原理”,还可以演化出多种圆平动机构。它 的性能决定了平动齿轮传动的性能,所以每综合出一种圆平动机构,就得 到一种新型平动齿轮传动。
编辑版pppt
8
第一节 平动齿轮传动机构
内啮合平动齿轮传 动比的计算:
编辑版pppt
9
第一节 平动齿轮传动机构
1. 应用了平行四边形机构和齿轮机构的串
行连接;
平动齿轮创新设计方法总结: 2. 应用了三套机构的并行连接;
3. 应用了转动副的销钉扩大和尺寸变化等
编辑版演pp化pt 与变异设计。
10
第一节 平动齿轮传动机构
3. 效率高。 4. 体积大。
外齿轮
平行四边形机构与内啮合齿轮
编辑版pppt
机构II型串联组合I
3
第一节 平动齿轮传动机构
三环减速器(外平动齿轮减速 器)的特点:
i12
Z2 Z1 Z2
1. 当Z1和Z2相差不大时, 可实现大传动比传动;
2. 效率高; 3. 体积、重量大; 4. 高速运动时平稳性较差。
二.运动副的变异设计实例
设计压力机或钢板剪床
机构选择:曲柄滑块机构。 运动分析:位移较小。 受力分析:杆件BC受力很 大,运动副B和C受力很大。
编辑版pppt
17
第二节 机构应用创新设计案例分析
二.运动副的变异设计实例
设计压力机或钢板剪床
机械创新设计06PPT课件
-
6
⑷特种加工机床
随着工件形状的日益复杂,以及材料的特殊性能(高 硬度材料及高脆性材料),引入了电加工、超声波加工的 方法,为机床开辟了新的领域。图中超声波加工原理是: 利用火花放电时能烧毁金属表面的电蚀现象进行金属的加 工。另外图中还显示了电解原理的磨削加工示意图及超声 波加工的应用实例。
-
7
机械系统创新设计实例
随着科技的发展,对机械产品的精度要求越来越高。例如宇宙 飞行用陀螺仪中的30mm球形转子,要求其不圆度不大于0.12um;导 弹控制系统的齿轮传动允许误差只有几秒。这些高精度的零件当然需 要高精度机床来加工。高精度机床除本身具有高精度以外,主要还附 加了一些特殊的校正、测量与定位装置。如图所示的机构。
-
8
机械系统创新设计实例
1、蒸汽机
⑴原始蒸汽机 17世纪末,法国技师巴本制成了世界 第一台蒸汽机。其工作原理是,通过向汽缸中注水并加热, 水蒸气将活塞推动上去,当活塞被推到汽缸顶部时再撤热, 然后使缸内汽冷却,大气压力便将活塞推下来。该蒸汽机 虽然很原始,但就其具备汽缸与活塞来说是具有划时代意 义的。
-
24
机械系统创新设计实例
-
25
机械系统创新设计实例
③有效负载:指操作机在工作时臂端可能搬运物体的重量
或所能承受的力及转矩。机器人的有效负载除受到驱动功率 的限制外,还受到材料、环境、运动参数(如速度、加速度 及其方向)的限制。如图示的加拿大手臂,用于航天飞机上 的机器人,额定搬运质量为14500kg,在运动速度较低情况 下能达到29500kg。然而,这种负荷能力只有在太空中失重 条件下才有可能达到。在地球上,该手臂本身重量达410kg, 连自重引起的臂杆变形都无法承受。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(连杆数量不变)
2L2 3L3 4L4 nLn 2 J (运动副数量不变)
所有构件的运动副元素数目之和=运动链中的运动副元素数目之和。
示中,N为运动链中连杆数量;J为运动链中运动副的数量。 将上两式代入平面连杆机构自由度公式
F 3n 2PL 3N 1 2 J
2.分析这三种已有设计,并归纳它们的拓朴构造特性 1)悬挂装置为自由度为1的平面机构 2)机构由六个构件和七个运动副组成 3)机构中有六个转动副 4)机构中有一个移动副 5)机构中有一个固定机架 6)机构中有一个铰支杆 7)机构中有一个摆动杆,其一端与机架铰接,另一端与 后轮联接 8)机构中有一个平面运动杆 9)机构中有一个减振装置,(二个构件组成:活塞和缸 体)
3.选五十铃RM250X Full-floater越野摩托车后轮悬挂 装置为原始机构,其运动简图为图6-5
二、一般化运动链
将原始机构的运动简图(图6-5)进行一般化处理,转 化成一般化运动链。 1.一般化:把包含有不同类型构件与运动副的原始机 构,转化为只含连杆和转动副的一般化运动链。 2.一般化原则: 1)将非刚性构件转化为刚性构件 2)将非连杆形状的构件转化为连杆。 3)将高副转化为低副。 4)将非转动副转化为转动副。 5) 解除固定杆(即机架)的约束,机构成为运动链 6)原始机构与其所对应的一般化机构,其自由度数应 保持不变。
多杆机构正是在基本机构上陆续添加若干套杆组而形成的。 添加杆组之后,并不改变机构的自由度数目。 根据定义,杆组应符合下列条件:设该杆组有n个活动构件, 有PL个低副,则应符合 F 3n 2P 0 L 最简单的杆组是 n 2、PL 3 的运动链。这种杆 组按所包含的转动副和移动副的数目和分布情况,可以 分为五种形式。
第六章 机构再生运动链原理与创新
再生运动链法:颜鸿森教授提出的颜氏创造机构设计法。 再生运动链法实际为演绎法:由一个原始机构按一定规 律演绎出同样功能的新机构为演绎法。再生运动链法是 根据机构的杆组组成原理,把一个特定的机构抽象为一 般化的运动链,再按再生运动链法的步骤与转化规则, 根据该机构在产品中的约束条件演化出众多的再生运动 链,然后按逆推程序得出相当数量的机构简图,供变异 设计选用。
三、高副低化
第一节 设计方法
再生运动链法创造机构的基本思路是: 1、选择一个能满足设计基本要求又具开发潜力的已 知机构作为创新设计的原始机构。
2、应用“颜氏”创造的特定方法将已知机构中的功能 构件和构件组演化为一般化构件,根据设计的约束条 件将原始机构抽象为一般化运动链,(只含有连杆和 回转副的运动链)还原出这一类机构共同的“根”
两式相减得
L3 2L4 3L5 n 2Ln N F 3
由
L3 2L4 3L5 n 2Ln N F 3
L2 L3 L4 Ln N
可确定组成一般化运动链可能出现的全部结构形式。 在此基础上,按组合的方法,分别在这些可能的结构形式中加 入设计约束条件,得众多能满足设计约束条件的再生运动链及 其响应机构,于是设计者可从中确定最理想的结构形式。
F 3L2 L3 L4 Ln 1 2L2 3L3 4L4 nLn F L2 L4 2L5 n 3Ln 3
L2 L3 L4 Ln N F L2 L4 2 L5 n 3Ln 3
连杆类配可分为两类:一类是由原始机构转化成的一般化运动 链得到的连杆类配,称为自身连杆类配;另一类是按照自由度 不变、连杆数不变、运动副数量不变的原则,由一般化运动链 推导出可能构成的连杆类配,称为相关类配。根据相关类配的 原则知,相关类配应满足下列条件:
L2 L3 L4 Ln N
二、平面机构的组成原理 1、基本机构 最简单的机构是由一个原动件和一个相对固定的机架所组成的 机构。原动件可以是转动件,也可以是移动件,但最常见的原 动件是转动件。这种最简单的机构称为基本机构。 基本机构的自由度为1 2、杆组
2
1
由一个原动件所带动的多杆机构,其自由度为1;但已知一个 原动件的基本机构的自由度是1,因此可知该机构除原动件以 外的那些活动构件和运动副所组成的运动链,其自由度必为零 我们把这种自由度为零的不可再分解的运动链,称为杆组。
一、原始机构
一般摩托车的后轮悬挂装置都是四杆机构,为后轮提供 的位移行程运动范围较小。有些摩托车后轮悬挂装置采用六杆 机构,取得较好效果。 1.收集到六杆悬挂装置为:本田CR250R Pro-Link(图62) 川崎KX250Vni-trak(图6-3),五十铃RM250X Fullfloater(图6-4)
例:单自由度六杆机构的运动链中,杆数N=6,运动副J=7,单 自由度F=1。根据
L3 2L4 3L5 n 2Ln N F 3 L3 2L4 3L5 n 2Ln 2
得
L3、L 4、 、Ln
为正整数,故该运动链中不可能有
表6-1为一些运动副的一般化图例
3.一般化运动链:机构一般化的目的是把包含不同类型杆 件与运动副的原始机构,转化为只含连杆和转动副的一般化 运动链。 一般化的概念是要找出不同机构的可能共同根源。一般化过程 的基础是建立在一般化规则上,而一般化规则是根据所定义的 一般化原则导出的。 一 般 化 原 则 1)所有运动副都需转化成一般化运动副;
3、从一般化运动链发散,运用数综合方法推衍出众多的 再生运动链。
4、根据众多的再生运动链还原出相应的机构,通过比 较寻找功能相同但性能更优的新机构。
用再生运动链法创新机构的设计流程如图所示。
第二节 原始机构及一般化运动链
原始机构可以通过两条途径选取 1)按功能要求及用途, 新设计出来的机构;2)从实际机械中已应用的与设计要求功 能相近的机构中挑选出的机构。 下面以第2条途径选取五十铃越野摩托车后轮悬置机构作 为原始机构,讨论再生运动链原理及方法。
类配方案 L2 Ⅰ 4 2
L3
L4 0
L 2 L3 L 4
L3 2L 4
6
2
Ⅱ
5
0
1
6
2
将四个二副元素杆与二个三副元 素杆进行组合构建新的运动链
将五个二副元素杆与一个四副元 素杆进行组合构建新的运动链出 现一个由三构件构成的刚体,运 动链将还原成四杆机构,不同于 原始机构故应剔除。
故原始机构(图6-5)经一般化处理后得到一六杆七副一般化 运动链,图6-7所示。 三、运动链图谱 应用机构数综合理论,可以得到一般化运动链的杆数、运动副 相同的全部可能的运动链图谱。 对图6-7所示的六杆七副运动链,其对应的非同构运动链形式 有两种,如图6-8所示。
第五节
再生运动链法设计应注意的问题
一、构件相似性判断
1、构件相似性定义
两个具有相同运动副数目的构件,若它们与运动链中其它构 件的连接关系均相同,则称此两构件相似。
4 3 2 1 5 6 4 3 2 5
4 3
2 1
5 6
4
3
2
1
5 6
1
6
构件的一般相似性
2、构件平行相似性定义 运动副数目相同的两构件与其它构件的位置关系相同,则 称此两构件平行相似。 1 2 3 4 1 3 2
C
D C
B B B D B
C
D
C
D B
C
D
其中B和D称为外端副,它们表示与组外构件形成的运动 副;C为组内两构件之间形成的运动副,称为内端副。这 种杆组称为Ⅱ级组。
n 4, PL 6 较为复杂一些的杆组,是 这种杆组有两类,如图所示
的杆组,
Ⅲ
Ⅳ
把自由度为零的杆组依次加到机构上,就可以由简单机 构形成多构件机构,其自由度显然仍等于原来较为简单 的机构的自由度。
基础知识 一、运动链 若干构件通过运动副连接而成的系统称为运动链。 闭链 开链 如果组成运动链的每个构件至少包含两个运动 副要素从而时运动链形成封闭的系统。 机构 把运动链中的某一构件加以固定或相对固定(成为 机架),当其中一个或几个具有独立运动的构件推动其 余构件作确定的运动时,则这个运动链就成其为机构。
含五个及五个以上运动副元素的连杆,及六杆运动链只可能
含有四个运动副元素以下的连杆,故将上式改写为
L3 2L4 2
又由式L 2 L 3 L 4 L n N 得L 2 L 3 L 4 6
L2 L3 L4 6
同时能满足上两式的连杆类配方案只能有两种,见表
对图6-9所示机构中的二级杆组选作减振器,可再生出4种 运动链,如图6-10所示。 3)摆动杆(Sw),对图6-10所示的运动链,选取不同的构 件作为摆动杆,最后再生出10种可行的再生机构,图6-11所示 4 3 2 34 Nhomakorabea2
5
1
6
6 5
1
第四节 可用特定化运动链图谱及机构图谱
1.可用特定化运动链图谱: 根据工程现实和设计者的选择,经由特定化程序 (Specialization),从特定化运动链图谱中,筛选出所有 满足设计要求与限制(约束)条件的可用的特定化运动链 图谱。 对摩托车后轮悬架的约束条件为:摆杆与固定杆相连满 足此约束条件的可行设计方案有六个,即图6-11a、b、d、f、 h、i。 2.机构图谱:把每一个可用特定化运动链具体化为相对应 的机构,并画出机构简图。图6-11a、b、d、f、h、i对应的 机构简图如图6-12所示。 3.新型机构图谱:将已存在的设计从所建立的机构图谱中 删除,所得到的即是新型机图谱,如图6-12a、c、d三种, 作为新型越野摩托车悬架机构的创新设计依据。
5、运动链的连杆类配
将机构转化为一般化运动链后,得到一个只有转动副的连 杆的组合,称为连杆的类配。一般化运动链中连杆类配可 用字符表示为: