FMU
FMU液位计调试方法

FMU3(简明调试方法1.接线方式屏蔽电缆接入仪表后,24V 电压接在仪表的+,—上面,屏蔽层接到仪表里面的接地端子另外,为保持仪表测量的稳定性,仪表外部的接地端子尽量也做一下接地。
2.调试方法一般来说,超声波液位计的调试需要修改如下几个选项,002(罐体形状),003(介质属性),004(过程条件),005(空罐标定),006(满罐标定)上电以后,仪表自检,然后变到测量值00,⑴按E键进入基本设置菜单,首先看到的是002这个选项,显示的是(拱顶罐,水平卧罐,旁通管,,等几个选项),如需更改,按+或者一号键选需要选择的罐型,按E键确定。
更改后+,- 号键一起按返回上层菜单。
⑵如不需更改,直接按E键进入下个菜单003。
003代表被测量介质的属性,有如下几个选项(未知,液体,固体直径大于4mm固体直径小于4mm,,等),根据现场情况进行选择。
修改方法同上。
⑶继续按E键进入004菜单,有如下几个选项(标准,平静液面,带搅拌器,,等)一般工况选择标准。
根据实际情况选择。
⑷继续按E 键进入005 菜单,这个是需要修改的很重要的一个值。
这个值是空罐值。
把池底到超声波探头表面的实际距离输入仪表,按+键进入菜单,选中空罐的值,按E键确认修改,+,—用来修改数值,E键确认。
⑸+,—号一起按返回005的主目录,继续按E键进入006菜单,这个也是需要修改的值,这个值是满罐值,它表示池底到最高液位的距离,修改方法同空罐值。
基本上,仪表的调试已经完成。
另,如果显示值波动较大,这个在罐子里面的测量可能出现,这个需要做一下回波抑制。
在基本设定中,按E键找到051这个菜单,进入后选择(manual,手动),+,—号一起按返回051菜单,继续按E键进入052菜单,输入抑制的距离,这个距离比空罐值要低一点,如果空罐5M的话,建议输入4.8M。
+——起按返回052菜单,继续按E键进入053菜单,选择抑制打开,等超声波自己开始进行回波抑制后,仪表会自动跳回抑制关闭状态,表示回波抑制完成。
FMU90中文操作手册

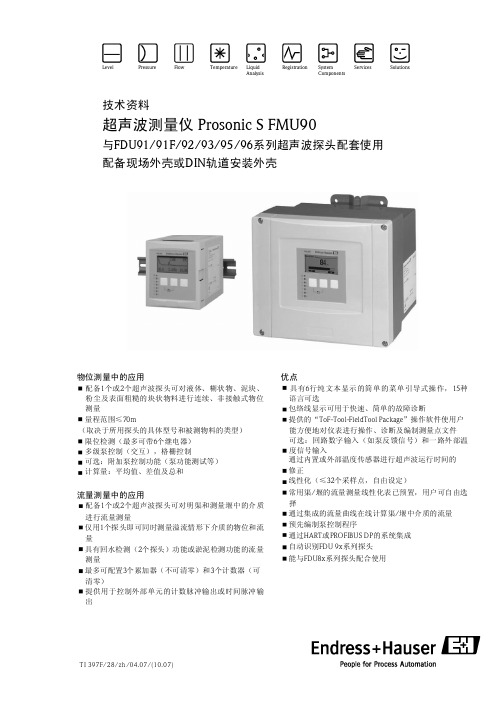
Prosonic S FMU9X中文操作手册与FDU91/91F/92/93/95/96系列超声波探头配套使用,完成物位/流量等参数测量物位测量中的应用:配备一个或两个超声波探头可对液体、糊状物、泥块、粉尘及表面粗糙的块状物料进行连续非接触式物位测量。
量程范围≦70m(根据不同的型号和使用场合决定测量范围);采用两个探头可完成差值、平均值以及总和的测量与计算。
流量测量中的应用:配备一个或两个超声波探头可对明渠和测量堰中的介质进行流量测量。
优点:六行纯文本液晶显示,简单的菜单引导式操作;自动识别FDU91/91F/92/93/95/96系列超声波探头,并且可与FDU8X系列探头配套使用;包络线显示可用于快速、简单的仪表故障判断;提供ToF-Tool-FieldTool Package 操作软件可使用户方便的对仪表进行操作、诊断和参数设定;内部预置常用的明渠/堰的流量测量线性化数据表,用户可根据情况自由选择,并根据线性化数据表计算流量;一、测量原理:BD:盲区;D:探头振膜表面到物料表面的距离;E:测量零点(0% ,空罐);F:最高物位(100% ,满罐);L:物位高度;V:物料的体积(或质量)探头向物料表面发射超声波脉冲信号。
物料表面反射回波,这部分回波又被探头所接收。
变送器计算探头发射和接收超声波脉冲信号的时间差t,由时间t和声速c可计算出探头振膜表面和物料表面的距离。
D=C * t/2通过计算出的D值可计算出理想状态下的物位L,体积V等。
1、盲区:物料的最高物位F不能进入盲区BD,传感器的特性决定了盲区内的回波信号将无法被接收到。
盲区的大小与所采用的探头型号有关。
2、干扰回波抑制:Prosonic S 具有干扰回波抑制功能,以确保干扰回波(如边缘,焊接点和安装过程造成的干扰)不会被误认为是实际的物位表面的反射回波信号。
3、物位测量的应用实例:4、通过HART的通讯连接:在标准型号中,HART信号是加载于第一输出电流之上的。
M型超声波FMU40 41 43超声液位测量 说明书
6
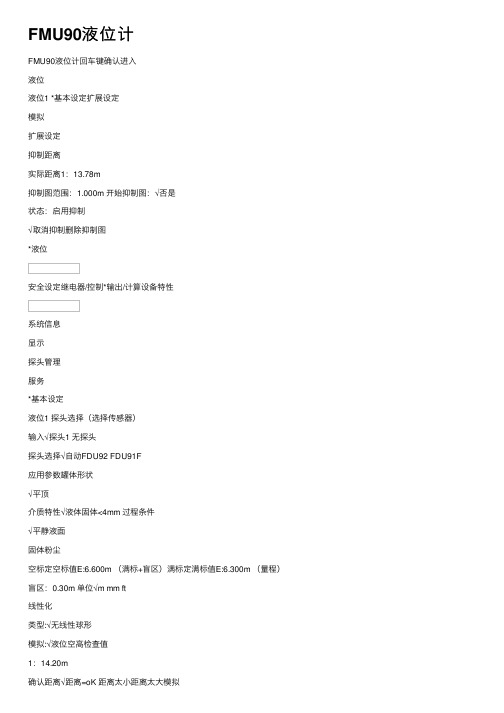
3.2 安装条件
液位测量的安装条件
2
3
4
1
5
7
1/6D
D
6
α
L
r
r
=Ltan
α 2
传感器
α
FMU40
11
FMU41
11
FMU43
6
L
γ
5m
0.48m
8m
0.77m
15m
0.79m
不可把传感器安装于罐顶的中心位置(3) 建议将传感器安 装在距罐壁 1 距离为罐直径的1/6处 使用防护罩 以防直接的日照或雨淋 不可安装于进料口的上方 (4) 在信号波束角 内 应避免安装任何装置 5 如限位开 关 温度传感器等 需要注意的是 对称装置如加热线 圈 挡板等 均有可能干扰测量 调整传感器使其垂直物料表面 7 在一个罐内不能安装两个超声波 因为两个信号会互相干 扰 可使用3dB波束角 来估算回波束和它的检测范围
008 距离/ 测量值
051
052
053
检查距离 抑制范围 开始抑制
显示D和L
-ok -太小 -太大 -未知 -手动
确认抑制范围
BD 盲 区
操作说明 操作说明描述了M型超声波的安装与调试 它包含了用于正常测量操作的所有功能 而且M型超声波提供附加功能用于测量点 的优化和测量值的转换 这些功能没有包含在这本操作手册中 你可以在35页浏览所有的功能 在操作手册BA240F/00/en中 你可以找到所有功能的详细描述 这些说明在提供的光盘中可以找到
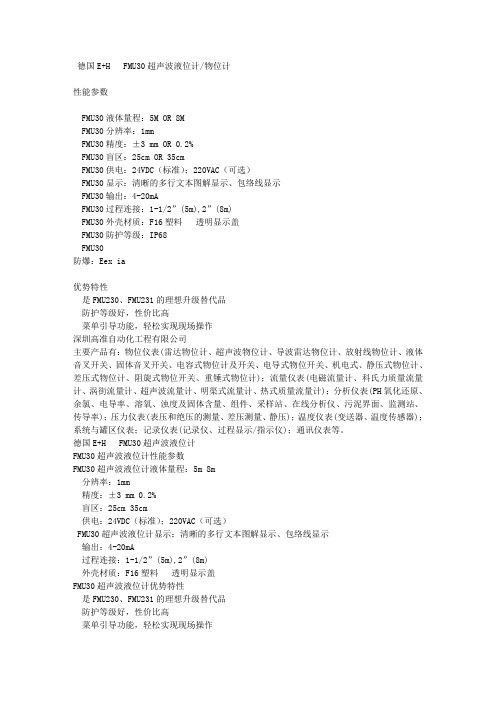
60 AF G1½” 1½ NPT
Ø 39
FMU 43带滑动法兰
~86
65
78
ENDRESS+HAUSER Prosonic M
华为波分技术-光纤自动监控单元
10ns, 30ns, 100ns, 300ns, 1μs, 3μs, 10μs, 20μs
脉冲输出功率 距离精度
dBm m
≤20
±1m±5×10-5×选用的测试量程±取样点间距 (不包括群折射率设置的误差)
读出分辨率
dB
0.001
反射测量分辨率
dB±Βιβλιοθήκη .0线性度dB/dB ±0.05
群折射率
1.400~1.700
描述 运行状态指示灯 告警指示灯
硬件描述
接口说明
MWA-I单板的面板上共有 6个光接口。
面板接口 LIN1 OUT1 TS1 RS1 RFM1
RFM2
接口类型 LC
LC LC LC LC
LC
用途描述
主信道输入光口
主信道输出光口
业务波长输出光口,与 FIU单板输入光口连接 业务波长输入光口,与 FIU单板输出光口连接 光纤监测波长接入光口,与 FMU单板的 1路输出光 口连接
机械指标 功耗
表11-3 FMU单板机械指标
项目 单板尺寸 (PCB) 拉手条尺寸 重量
指标值 321.0 mm (长) x 218.5 mm (宽) x 2.0 mm (厚) 345.0 mm (高) x 114.0 mm (宽) 2.5 kg
表11-4 FMU单板功耗指标
单板名称 FMU
单板最大功耗(常温 25℃) 25.0 W
11.1.1 应用
DWDM节点可以是 OTM、OLA、OADM、OEQ或 REG。FMU单板发出测试光脉冲, 并对反射信号进行接收、采集、处理并上报,实时监控工作光纤的运行情况。单块 FMU 最多可监控 4路光纤。
FMU单板在 DWDM系统中的应用如图 11-1所示。
FMU90液位计
FMU90液位计FMU90液位计回车键确认进⼊液位液位1 *基本设定扩展设定模拟扩展设定抑制距离实际距离1:13.78m抑制图范围:1.000m 开始抑制图:√否是状态:启⽤抑制√取消抑制删除抑制图*液位安全设定继电器/控制*输出/计算设备特性系统信息显⽰探头管理服务*基本设定液位1 探头选择(选择传感器)输⼊√探头1 ⽆探头探头选择√⾃动FDU92 FDU91F应⽤参数罐体形状√平顶介质特性√液体固体<4mm 过程条件√平静液⾯固体粉尘空标定空标值E:6.600m (满标+盲区)满标定满标值E:6.300m (量程)盲区:0.30m 单位√m mm ft线性化类型:√⽆线性球形模拟:√液位空⾼检查值1:14.20m确认距离√距离=oK 距离太⼩距离太⼤模拟√关闭物位体积*输出/计算→电流输出1分配/计算分配电流1输出:√液体1⽆输出电流1: 18.243mA *扩展标定电流模式调整20mA 电流值::√4~20mA0~20mA 固定电流输出阻尼3.0S(值越⼤,波动越⼩)4mA 阀值:√开关调整电流范围:√关开调整电流范围:16.700mm 调整4mA 电流值:0.100m HART 设定地址0前拟号5短位号HART :IT-A0301模拟:√关开安全设定报警时的输出.输出1√最⼤最⼩保持⽤户指定失波时的输出.液位1√保持斜率%min⽤户设置报警失波延时1:60s继电器设置继电器分配继电器1:报警继电器选择功能限位:√⽆液位1限位温度传感器1限位报警/诊断:⽆√报警继电器诊断继电器模拟继电器1模拟√关开设备特性操作参数距离单位√m ft mm位号标记输出1****语⾔√Chinese English Japanese密码/复位复位:0码:300状态:服务解锁系统信息仪表信息设备家族仪表家族FMU90输⼊/输出信息液位1输⼊:探头1探头选择:FDU92趋势显⽰趋势输出1时间间隔1S最⼩/最⼤值液位液位1最⼤值19.30m最⼩值0.00m 复位物位1√维持消除复位max 复位mix温度温度探头1实际温标定度:21℃最⼤值:31.7℃最⼩值:5.9℃reset √维持消除复位Max 复位Min 包络线探头包络线1图形设定包络线/包络线+FAC/包络线+⽤户定义抑制图单个曲线循环错误列表实际错误上次错误失波探头01 检查标定E01641诊断操作时间:16790h显⽰类型√⼀个测量值+棒状显⽰2个测量值+棒状显⽰测量值最⼤字体显⽰三组双数值轮流显⽰输出⽆√液位1 温度探头1 探头1距离拟本1探头管理→F D U 探头→F D U 探头1→探头1探头操作√开关探头优先级1探头选择√⾃动FDU92 FDU93侦测窗⼝:√关开复位常见故障:介质→探头→参数1.失波死值①探头内灌注⽔;②介质表⾯被泡沫覆盖,,对准清澈液⾯⽰值不变,断定此探头坏(换新探头好)。
FMU30超声波物位计
德国E+H FMU30超声波液位计/物位计性能参数FMU30液体量程:5M OR 8MFMU30分辨率:1mmFMU30精度:±3 mm OR 0.2%FMU30盲区:25cm OR 35cmFMU30供电:24VDC(标准);220VAC(可选)FMU30显示:清晰的多行文本图解显示、包络线显示FMU30输出:4-20mAFMU30过程连接:1-1/2”(5m),2”(8m)FMU30外壳材质:F16塑料透明显示盖FMU30防护等级:IP68FMU30防爆:Eex ia优势特性是FMU230、FMU231的理想升级替代品防护等级好,性价比高菜单引导功能,轻松实现现场操作深圳高准自动化工程有限公司主要产品有:物位仪表(雷达物位计、超声波物位计、导波雷达物位计、放射线物位计、液体音叉开关、固体音叉开关、电容式物位计及开关、电导式物位开关、机电式、静压式物位计、差压式物位计、阻旋式物位开关、重锤式物位计);流量仪表(电磁流量计、科氏力质量流量计、涡街流量计、超声波流量计、明渠式流量计、热式质量流量计);分析仪表(PH氧化还原、余氯、电导率、溶氧、浊度及固体含量、组件、采样站、在线分析仪、污泥界面、监测站、传导率);压力仪表(表压和绝压的测量、差压测量、静压);温度仪表(变送器、温度传感器);系统与罐区仪表;记录仪表(记录仪、过程显示/指示仪);通讯仪表等。
德国E+H FMU30超声波液位计FMU30超声波液位计性能参数FMU30超声波液位计液体量程:5m 8m分辨率:1mm精度:±3 mm 0.2%盲区:25cm 35cm供电:24VDC(标准);220VAC(可选)FMU30超声波液位计显示:清晰的多行文本图解显示、包络线显示输出:4-20mA过程连接:1-1/2”(5m),2”(8m)外壳材质:F16塑料透明显示盖FMU30超声波液位计优势特性是FMU230、FMU231的理想升级替代品防护等级好,性价比高菜单引导功能,轻松实现现场操作FMU30超声波液位计典型应用污水提升泵站、污水处理池废水、泥浆、石灰浆地下油罐流动性好的固体粉料、颗粒料德国E+H FMU30超声波液位计能完全替代FMU231E-AA32和FMU230的超声波液位计FMU30,FMU30超声波液位计性能参数FMU30超声波液位计液体量程:5m 8m分辨率:1mm精度:±3 mm 0.2%盲区:25cm 35cm供电:24VDC(标准);220VAC(可选)FMU30 超声波液位计显示:清晰的多行文本图解显示、包络线显示输出:4-20mA过程连接:1-1/2”(5m),2”(8m)外壳材质:F16塑料透明显示盖FMU30超声波液位计优势特性是FMU230、FMU231的理想升级替代品防护等级好,性价比高菜单引导功能,轻松实现现场操作FMU30超声波液位计典型应用污水提升泵站、污水处理池废水、泥浆、石灰浆地下油罐流动性好的固体粉料、颗粒料超声波液位计FMU30-AAHEAAGGFSPK: FJC[AA] 认证: 非防爆场合[H] 显示,操作: 现场包络线显示,按键[E] 电气连接: 电缆密封套 M20, IP68[AA] 传感器: 1-1/2"; 5m 液体/2m 固体; 0.25m[GGF] 过程连接: 螺纹 ISO228 G1-1/2, PP超声波液位计FMU30-AAHEABGHFSPK: FJC[AA] 认证: 非防爆场合[H] 显示,操作: 现场包络线显示,按键[E] 电气连接: 电缆密封套 M20, IP68[AB] 传感器: 2"; 8m 液体/3.5m 固体; 0.35m[GHF] 过程连接: 螺纹 ISO228 G2, PP应用Prosonic T 适用于对液体及颗粒料位进行非接触式连续物位测量的一体化仪表。
FMU90资料中文说明书
6
Endress + Hauser
Pro nson ic S FMU90
传感器输入
外部限位开关(可选) 外部温度传感器
输入
根据所采用变送器的具体型号,可在FDU91,FDU91F,FDU92,FDU93,FDU95和FDU96中选择 1个或2个探头与其配合使用。Prosonic S变送器能自动识别探头的具体型号。
TI 396F:适用于FDU91/91F/92/93/95/96系列探头 TI 189F:适用于FDU80/80F/81/81F/82/83/84/85/86系列探头
超声波探头内集成了一体化温度探头,以补偿由于超声波运行时间变化而导致的温度变化。 Prosonic S FMU 90可带一路外部温度传感器输入, (FMU90-********B ) *** ,可选以下传感器:
DC电压:35 VDC,100W AC电压:4A,250V,100VA(cosj=0.7)
可选:
保持(末次值) 励磁 去磁 预设值
断电反应 LED灯管2)
延时开启选择 前面板上的黄色LED灯指示相应继电器的工作状态,工作时闪烁。 报警继电器LED指示灯在正常工作时亮。 脉冲继电器LED灯在接收脉冲时闪烁。
用法(举例) 泵反馈信号(FMU 90-*3******B***及FMU 90-*4******B***) 泵费用控制(FMU 90-*3******B***及FMU 90-*4******B***) 计数器的开启/停止/复位(用于流量测量) (FMU 90-*2******B***及FMU 90-*4******B***) min/ max物 位检 测, 如L iquipha nt
D=c·t/2
通过计算出的D值大小,可计算出理想状况下,下列测量变量的数值: 物位L 体积V 通过测量堰或明渠的介质流量Q
Prosonic M FMU40、FMU41、FMU42、FMU44 产品说明书
Products Solutions ServicesSafety Instructions Prosonic M FMU40, FMU41, FMU42, FMU444-20 mA HART, PROFIBUS PA,FOUNDATION FieldbusATEX, IECEx:Ex db [ia] IIC T6...T4 Ga/Gb Ex db [ia] IIC GbXA00176F-F/00/EN/14.22-00715579042022-06-20Prosonic M FMU40, FMU41, FMU42, FMU44XA00176F-F Prosonic M FMU40, FMU41, FMU42, FMU444-20 mA HART, PROFIBUS PA, FOUNDATION FieldbusTable of contentsAbout this document (4)Associated documentation (4)Supplementary documentation (4)Manufacturer's certificates (4)Manufacturer address (5)Other standards (5)Extended order code (5)Safety instructions: General (7)Safety instructions: Special conditions (8)Safety instructions: Installation (8)Safety instructions: Ex d joints (9)Temperature tables (9)Connection data (9)Endress+Hauser3XA00176F-F Prosonic M FMU40, FMU41, FMU42, FMU444Endress+HauserAbout thisdocumentThis document has been translated into several languages. Legally determined is solely the English source text.The document translated into EU languages is available:•In the download area of the Endress+Hauser website: -> Downloads -> Manuals and Datasheets ->Type: Ex Safety Instruction (XA) -> Text Search: …•In the Device Viewer: -> Product tools ->Access device specific information -> Check device features If not yet available, the document can be ordered.Associated documentationThis document is an integral part of the following Operating Instructions:HART:BA00237F/00PROFIBUS PA:BA00238F/00FOUNDATION Fieldbus:BA00239F/00Supplementary documentationExplosion-protection brochure: CP00021Z/11The Explosion-protection brochure is available:•In the download area of the Endress+Hauser website: -> Downloads -> Brochures and Catalogs -> Text Search: CP00021Z •On the CD for devices with CD-based documentation Manufacturer's certificatesEU Declaration of Conformity Declaration Number:EG02007The EU Declaration of Conformity is available:In the download area of the Endress+Hauser website: -> Downloads -> Declaration -> Type: EU Declaration -> Product Code: ...EU type-examination certificate Certificate number:KEMA 02ATEX1006 XProsonic M FMU40, FMU41, FMU42, FMU44XA00176F-F Endress+Hauser 5List of applied standards: See EU Declaration of Conformity.IEC Declaration of Conformity Certificate number:IECEx DEK 11.0014X Affixing the certificate number certifies conformity with the following standards (depending on the device version):•IEC 60079-0 : 2017•IEC 60079-1 : 2014•IEC 60529 : 2013Manufacturer addressEndress+Hauser SE+Co. KG Hauptstraße 179689 Maulburg, Germany Address of the manufacturing plant: See nameplate.Other standardsAmong other things, the following standards shall be observed in their current version for proper installation:•IEC/EN 60079-14: "Explosive atmospheres - Part 14: Electrical installations design, selection and erection"•EN 1127-1: "Explosive atmospheres - Explosion prevention and protection - Part 1: Basic concepts and methodology"Extended order codeThe extended order code is indicated on the nameplate, which is affixed to the device in such a way that it is clearly visible. Additional information about the nameplate is provided in the associated Operating Instructions.Structure of the extended order code FMU4x –*************+A*B*C*D*E*F*G*..(Device type)(Basic specifications)(Optional specifications)* =Placeholder At this position, an option (number or letter) selected from the specification is displayed instead of the placeholders.XA00176F-F Prosonic M FMU40, FMU41, FMU42, FMU446Endress+HauserBasic specifications The features that are absolutely essential for the device (mandatory features) are specified in the basic specifications. The number of positions depends on the number of features available.The selected option of a feature can consist of several positions.Optional specifications The optional specifications describe additional features for the device (optional features). The number of positions depends on the number of features available. The features have a 2-digit structure to aid identification (e.g. JA). The first digit (ID) stands for the feature group and consists of a number or a letter (e.g. J = Test, Certificate). The second digit constitutes the value that stands for the feature within the group (e.g. A = 3.1 material (wetted parts), inspection certificate).More detailed information about the device is provided in the following tables. These tables describe the individual positions and IDs in the extended order code which are relevant to hazardous locations.Extended order code: Prosonic M The following specifications reproduce an extract from the product structure and are used to assign:•This documentation to the device (using the extended order code on the nameplate).•The device options cited in the document.Device type FMU40, FMU41, FMU42, FMU44Basic specificationsProsonic M FMU40, FMU41, FMU42, FMU44XA00176F-F Endress+Hauser 7Optional specifications No options specific to hazardous locations are available.Safety instructions:General•The device is intended to be used in explosive atmospheres as defined in the scope of IEC 60079-0 or equivalent national standards. If no potentially explosive atmospheres are present or if additional protective measures have been taken: The device may be operated according to the manufacturer's specifications.•Staff must meet the following conditions for mounting, electrical installation, commissioning and maintenance of the device:•Be suitably qualified for their role and the tasks they perform •Be trained in explosion protection •Be familiar with national regulations •Install the device according to the manufacturer's instructions and national regulations.•Avoid electrostatic charging:•Of plastic surfaces (e.g. enclosure, sensor element, special varnishing, attached additional plates, ..)•Of isolated capacities (e.g. isolated metallic plates)•Refer to the temperature tables for the relationship between the permitted ambient temperature for the electronics enclosure,depending on the range of application and the temperature class.XA00176F-F Prosonic M FMU40, FMU41, FMU42, FMU448Endress+HauserSafety instructions:Special conditionsPermitted ambient temperature range at the electronics enclosure:–40 °C ≤ T a ≤ +60 °C •Observe the information in the temperature tables.•To avoid electrostatic charging: Do not rub surfaces with a dry cloth.•In the event of additional or alternative special varnishing on the enclosure or other metal parts or for adhesive plates:•Observe the danger of electrostatic charging and discharge.•Do not install in the vicinity of processes (≤ 0.5 m) generating strong electrostatic charges.Device type FMU42, FMU44Avoid electrostatic charging of the sensor (e.g. do not rub dry and install outside the filling flow).Safety instructions:Installation1A Zone 11Tank, hazardous area Zone 02Electronic insert 3Enclosure 4Connection compartment (Ex db)5Power supply 6Tank, hazardous area Zone 17Local potential equalizationProsonic M FMU40, FMU41, FMU42, FMU44XA00176F-F Endress+Hauser 9•In potentially explosive atmospheres:•Do not disconnect the electrical connection of the power supply circuit when energized.•Do not open the connection compartment cover when energized.•Only use certified cable entries suitable for the application. Observe national regulations and standards.•When operating the transmitter enclosure at an ambient temperature under –20 °C, use appropriate cables and cable entries permitted for this application.•Continuous service temperature of the connecting cable: ≥ T a +5 K.•When connecting through a conduit entry approved for this purpose,mount the associated sealing unit directly at the enclosure.•Seal unused entry glands with approved Ex db sealing plugs.•Option:•Remote display, e.g. FHX40 (Observe Safety Instructions)•Service interface: Commubox with associated ToF cable (Observe Safety Instructions)Potential equalization Integrate the device into the local potential equalization.Safety instructions: Ex d joints•If required or if in doubt: ask manufacturer for specifications.•Flameproof joints are not intended to be repaired.Temperature tablesZone 1 - Application Observe the permitted temperature range.Connection dataConnection compartment Ex dbXA00176F-F Prosonic M FMU40, FMU41, FMU42, FMU4410Endress+Hauser Option Remote display, e.g. FHX40:Power supply and signal circuit with protection type: intrinsic safety Ex ia IIC, Ex ia IIB.Connecting the Commubox service interface with the associated ToF cable*71557904*71557904。
PX4 FMU主控板和 IO扩展板LED说明

FMU主控板和IO扩展板LED说明
FMU主控板LED说明
绿色LED:电源指示LED,常亮
蓝色LED:GPS /位置指示
▪不亮:没有位置传感器(GPS模块)的连接
▪慢闪:GPS模块或光流模块已正常连接
▪快闪:错误
▪常亮:位置锁定
红色LED:解锁状态指示
▪慢闪:等待解锁状态(系统自检通过)
▪快闪:拒绝解锁(系统自检未通过)
▪常亮:已解锁
LED组合指示
▪蓝色和红色LED交替闪烁并伴随这蜂鸣器报警声音:
传感器未校准,请在飞行前校准传感器
▪上电后红色LED快速闪烁,蓝色LED不亮:
FMU在引导装载程序模式下,可以通过USB接口连接地面站软件刷新固件▪蓝色LED常亮,红色LED不亮,蜂鸣器(SOS莫尔斯码):
FMU没有正确初始化(可能是microSD卡插入或传感器硬件故障)
IO扩展板LED说明
绿色LED:电源指示LED,常亮
蓝色LED:心跳指示(与FMU主控板通信连接状态的指示)
▪2赫兹闪烁:心跳正常运行
▪常亮:上传新固件到IO扩展板(红色LED应该是常亮或闪烁不均匀) 红色LED:失效保护状态指示
▪快闪:在引导装载程序模式下(蓝色LED不亮)
▪4赫兹闪烁:没有FMU主控板信号输入
▪常亮:初始化错误,请检查你的RC参数配置选项
▪不亮:系统正常
安全开关LED说明
▪常亮:FMU主控板和IO扩展板已解锁
▪慢闪:准备解锁状态
▪快闪:错误或拒绝解锁
▪慢速双闪:IO扩展板解锁,但FMU主控板没有解锁
▪慢速四闪:FMU主控板解锁,但IO扩展板没有解锁。
FMU862调试
FMU86x系列超声波液位计调试手册一、原理介绍超声波液位计是根据超声波反射原理来进行物位测量的。
超声波液位计由变送器和测量探头组成。
测量探头发射超声波,超声波遇到物体反射,测量接收到反射波,即可计算出发射超声波和接收超声波之间得时间差t。
而超声波的速度即为声速(331.6m/s,0℃时)。
则物位H=C*t/2C_______超声波的速度,与温度有关。
二、安装FMU86x系列超声波仪表应选择干扰小的位置安装:在仪表工作范围内,应尽量消除各种干扰源,并且仪表距离测量容器壁应保持一定的距离,容器壁应比较光滑。
安装具体要求以英文操作手册为准,请仔细阅读。
三、调试1、电源与接线。
请注意仪表的电源:24VDC或220VAC。
所有接线(电源线、信号线、输出线等)均严格遵守操作手册。
2、上电后,待红灯熄灭后,看到有绿灯闪烁,即仪表已经开始正常工作。
3、按键的操作。
仪表共有六个按键:“↑”、“↓”、“V”、“H”、“E”及“《=”。
按“V”、“H”键可定位矩阵参数。
例:当前位置为“V0H0”,按“V”两下,即定位于“V2H0”,若再按“H”两下,即定位于“V2H2”。
“↑+”、“↓─”为修改键,“E”为确认键,“《=”为易位键:如要修改“V0H1”参数,先按“V”“H”键定位于“V0H1”,若原先数字为“10.00”(斜体为闪烁,可修改),按“↑”(参数增大)或“↓”(参数减小)至所需值;按“《=”,移至所要修改的数位,修改之;修改完毕,“E”确认,否则输入参数无效。
4、解锁。
按“V”“H”键至V9H6,输入“519”,即解锁;若不是“519”,即加锁。
5、基本设置单位选择:V8H3=1(单位为m,建议使用),0(单位为ft)。
电流输出选择:V8H1=1(4~20mA输出,建议使用),0(0~20mA输出)。
仪表第一次调试或复位后的调试,需先选择与二次表相连的探头型号,V0H4=80~86(对应FDU80~86)。
超声波物位变送器Prosonic S FMU90说明书
超声波物位变送器,与1个或2个超声波物位传感器(FDU90、FDU91、FDU91F、FDU92、FDU93、FDU95)配套使用应用•液体的液位测量和限位检测,或固体散料的料位测量和限位检测•明渠或测量堰中的流量测量•最大测量范围:45 m (148 ft)•泵控制和格栅控制•可选:高级泵控制(例如泵功能测试)•平均值、差值或总和计算•回水检测或污染物检测•最多提供3个累加器和3个每日计数器•计数脉冲和时间脉冲输出,用于控制外部单元优势•操作便捷的引导式菜单,6行纯文本显示,15种显示语言可选•显示屏上显示包络线,直接实现现场诊断•使用免费的FieldCare 调试软件轻松完成仪表操作、诊断和测量点归档记录•通过自带或外部温度传感器实现基于温度的行程时间校正•线性化功能(最多32个线性化点,允许用户自定义);仪表内置常用水槽和测量堰的线性化表•通过HART 或PROFIBUS DP 通信实现系统集成•可选铝制现场型外壳,适用ATEX II 3D 防爆区应用Products Solutions Services技术资料Prosonic S FMU90超声波物位变送器TI00397F/28/ZH/19.21715292142021-05-31Prosonic S FMU902Endress+Hauser目录重要文档信息..............................3信息图标 (3)功能与系统设计 (4)液体限位检测................................4明渠或测量堰中的流量测量......................5盲区距离...................................5基于温度的行程时间校正........................5干扰回波抑制................................5泵控制....................................6物位线性化.................................6流量线性化.................................6特殊功能...................................6数据记录功能................................7物位测量的应用实例...........................8流量测量的应用实例.. (10)输入 (11)传感器输入................................11外部限位开关输入...........................11外部温度传感器输入.. (12)输出....................................13模拟量输出................................13继电器...................................14PROFIBUS DP 接口...........................15电源....................................16电气参数(交流电)..........................16电气参数(直流电)..........................16电气隔离..................................16保险丝...................................16电气连接 (17)电缆入口..................................17电缆规格. (17)性能参数 (18)参考操作条件...............................18最大测量误差...............................18测量误差..................................18测量值分辨率...............................18工作频率..................................18蒸汽压力影响...............................18环境条件 (19)环境温度..................................19储存温度..................................19气候等级..................................19抗振性...................................19防护等级..................................19电磁兼容性................................19机械结构 (20)外形尺寸..................................20重量. (23)材质 (23)可操作性 (25)通过HART 通信操作..........................25通过PROFIBUS DP 通信操作....................25显示与操作单元概览..........................26显示与操作单元.............................26操作方式..................................26证书和认证 (27)CE 认证...................................27RoHS 认证.................................27RCM-Tick 认证..............................27EAC 符合性声明.............................27防爆认证..................................27其他标准和准则.............................27订购信息 (27)订购信息..................................27供货清单. (28)附件 (28)通信专用附件...............................28设备专用附件. (28)补充文档资料.............................33技术资料..................................33操作手册..................................33设备参数描述...............................33槽/索引列表(PROFIBUS DP)...................33《安全指南》文档资料代号.....................33Prosonic S FMU90Endress+Hauser 3重要文档信息信息图标安全图标操作和其他影响提示信息图标。
美国国内系统重要性金融基础设施评估方法和名单

美国国内系统重要性金融基础设施评估方法和名单一、背景金融基础设施(Financial Market Utilities, FMU)是指为金融机构之间或金融机构和金融基础设施之间进行支付,为证券或其他金融交易进行转接、清算或结算的多边系统管理者或运营者,是整个金融体系赖以存在和正常运转的基础。
系统重要性FMU能在金融市场广泛发挥作用,大大减少参与者和金融体系整体的风险。
然而,一旦其运行中断、瘫痪或倒闭,将对金融机构和市场的流动性造成破坏性影响,使市场参与方和对手方蒙受重大财务损失,威胁金融业的清偿能力。
为进一步增强风险管理和保障安全稳健的运作,降低系统性风险和道德风险,《多德-弗兰克法案》为美国系统重要性FMU构建了新的评估框架和监管措施,并授权FSOC确定哪些系统重要性FMU应接受美联储等金融监管机构更严格的审慎监管。
二、评估方法与认定名单(一)评估方法与指标按照《多德-弗兰克法案》的规定,FSOC在评估某家FMU是否具有系统重要性时,主要考虑以下4个指标:1.该机构处理、清算或结算的交易总值(货币价值);2.该机构对其对手方的信用风险和流动性风险总敞口;3.该机构与其他FMU或者支付、清算和结算活动的关系,相互依存度或其他交互作用;4.该机构的破产或中断可能对关键市场、金融机构或金融体系造成的影响。
FSOC采取个案分析的方法,根据FMU的自身特点“量身评估”其系统重要性。
第一步,FSOC按照上述评估标准,依据公开数据以及其他可得信息确定哪些FMU可能被列入。
第二步,逐一对筛选出的FMU进行审查。
必要时,FSOC有权要求其报送保密信息与数据。
(二)8家系统重要性FMU名单与认定依据FSOC在7月18日的会议上通过投票一致同意认定8家系统重要性FMU,分别为:清算所支付公司(PaymentsCo)、国际结算银行(CLS)、芝加哥商品交易所(CME)、ICE清算信贷有限公司(ICE)、存管信托公司(DTC)、固定收益清算公司(FICC)、全国证券清算公司(NSCC)和期权清算公司(OCC)。
FMU和EEC

FMU及EEC介绍1.1 FMU功能FMU是FADEC的组成部分。
与EEC配合工作控制燃油流量,同时提供伺服燃油。
燃油计量组件(FMU)提供各种工作状态下的燃油流量控制。
通过力矩马达受控伺服驱动装置由FMU经EEC指令进行可变燃油计量。
位置解析器提供反馈到EEC。
FMU会将超出发动机要求的多余燃油经旁通环路输送到燃油分流活门。
图1-1 FMU内部结构1.2 FMU工作原理一个独立的超速活门与主调节活门相连。
如果EEC检测到超速时,超速系统减少发动机燃油流量到最小值。
超速活门位置提供到EEC。
超速控制器通过一个双重线圈力矩马达启动。
FMU 内有一个独立于主调节活门和超速控制活门的燃油关断活门。
当闭合时,活门切断燃烧系统的燃油并且通过连接高压燃油到高压泵进口来切断燃油。
该活门由一个28伏直流电动力矩马达控制。
活门闭合位置的指示以数字信号从EEC提供到EIU。
FMU也提供燃油液压压力到所有燃油系统外部作动筒。
包含BSBV系统作动筒,静子叶片作动筒,返回油箱活门,ACAO空气活门和HPT/LPT ACC活门。
EEC发送信号给力矩马达定位分流活门以控制每个调节作动筒。
来自作动筒的低压燃油被输送到燃油分流活门。
在启动期间,接通/关断伺服活门自动切断刀外部装置的控制流以低速使燃油泵需求最小化。
伺服活门在接收到分流活门指示旁通环路内燃油充足的燃油压力信号灯后打开。
图 1-2 增压与关断活门与力矩马达超转活门(OVER SPEED VALVE)超速活门将在EEC的控制下提供LP(N1)和HP(N2)转子的超速保护,该活门的工作情况通过两个微动电门分别提供给EEC的两个通道以实现监控。
EEC通过力矩马达控制超转活门的开合。
在发动机停车状态下,超速活门在弹簧力的作用下处于关闭位置。
当发动机启动或正常的发动机工作状态下,该活门在燃油压力的作用下克服弹簧力完全打开。
一旦发生发动机超速状态,EEC将发送一个信号给超速活门的扭矩马达以便完全关闭活门实现转子超速保护,而且将通过液锁将活门锁定在关闭位置以防止发动机被加速。
FMU90测厚仪中英文操作说明
FMU90测厚仪设置操作说明1.面版按键说明:左边的按键为左键中间的按键为中键右边的按键为右键2.同时按下左键和中键为返回退出。
3.按左键为上翻或返回上一层菜单。
4.按中键为下翻或进入下一层菜单。
5.在显示主界面时按左键进入菜单捷径界面第一步:菜单捷径IX001 说明:在菜单捷径(IX001)菜单中选择第三项语言,1.位号标记选择操作语言,按右键确认,进入语言选项2.包络线菜单。
3.语言4.仪表信息5.密码/复位第二步:语言D10111. English 说明:在语言(D1011)菜单中,按中键选择第二项2 Chinese Chinese(中文)按右键确认,如语言菜单中有3 Jopanese 中文选项的话就可以选择中文界面进行操作4 Korean ,如没有的话只有使用English(英文)操作,5 Bahase 按确认键返回显示主界面,按右键进入主菜6 Thai 单。
第三步:主菜单CX0011.液位(level) 说明:按左键或中键选择主菜单的第一项液位选项2.安全设定(safety settings) ,按右键确认进入液位界面。
3.继电器/控制(relay/controls)4.输出/计算(output/calculat)5.设备特性(device properties)6.系统信息(system information)7.显示(display)8.探头管理(sensor management)第四步:液位(level) LX1001 说明:按右键确认进入液位菜单。
液位1(level LVL 1)第五步:液位1(level LVL 1) LX10021.基本设定(basic setup) 说明:按左键或中键选择第一项基本设定2.扩张设定(extended calibr) (basic setup),按右键进入下一级菜单。
3.模拟(simulation)第六步:液位1(LVL 1) 探头选择(sensor sel) L1003输入(input):探头(sensor 1)探头检测(detected):FDU91第七步:液位1(LVL 1) 应用参数(appl.para) L1004罐体形状(tank shape):物位(no ceiling)介质特性(medium property):固体(solid)<4mm过程条件(process cond):输送带(conveyor)罐体形状(tank shape )L100A 1.拱顶(dome.ceiling) 2.卧式标空(horizontal cyl) 3.弯通道(bypass) 4.导坡管(stilling well) 5.平顶(flat ceiling) 6.球形(sphere) 7.物位(no ceiling)选择为7.物位(no ceiling)。
空调方面的缩写

AHU ——空气处理机CH. ——制冷机C.D. ——冷凝水管C.T. ——冷却塔CAV ——新风量控制箱EAF ——排风机EAD ——排风管EAG ——排风口EAL ——排风百叶FAG ——新风口FAL ——新风百叶FAF ——补风机F.A. ——新风FAD ——新风管F.D. ——防火阀HC ——加热盘管FC ——风机盘管HX ——热交换器L/L---------低位M/L--------中位MAD-------补风管MAF-------补风机N.C.-------常闭N.O.-------常开N.R.D.----风管止回阀P.A.-------经过处理的新风PDA-------新风管(经过处理的新风) PAU-------新风机(带处理功能) PAL-------新风百叶R.A.-------回风RAD-------回风管RAG-------回风口AEROFLEX “亚罗弗”保温ALCO “艾科”自控Alerton 雅利顿Alfa laval阿法拉伐ARMSTRONG “阿姆斯壮”保温AUX 奥克斯BELIMO 瑞士“搏力谋”BERONOR西班牙“北诺尔”电加热器BILTUR 意大利“百得”BOSIC “柏诚”自控BROAD 远大Burnham美国“博恩汉”锅炉CALPEDA意大利“科沛达”水泵CARLY 法国“嘉利”制冷配件Carrier 开利Chigo 志高Cipriani 意大利斯普莱力CLIMAVENETA意大利“克莱门特”Copeland“谷轮”压缩机CYRUS意大利”赛诺思”自控DAIKIN 大金Danfoss丹佛斯Dorin “多菱”压缩机DUNHAM-BUSH 顿汉布什DuPont美国“杜邦”制冷剂Dwyer 美国德威尔EBM “依必安”风机ELIWELL意大利“伊力威”自控EVAPCO美国“益美高”冷却设备EVERY CONTROL意大利“美控”Erie 怡日FRASCOLD 意大利“富士豪”压缩机FRICO瑞典“弗瑞克”空气幕FUJI “富士”变频器FULTON 美国“富尔顿”锅炉GENUIN “正野”风机GREE 格力GREENCOOL格林柯尔GRUNDFOS “格兰富”水泵Haier 海尔Hisense 海信HITACHI 日立Honeywell 霍尼韦尔Johnson 江森Kelon 科龙KRUGER瑞士“科禄格”风机KU BA德国“库宝”冷风机Liang Chi 良机LIEBERT 力博特MARLEY “马利”冷却塔Maneurop法国“美优乐”压缩机McQuary 麦克维尔Midea 美的MITSUBISHI三菱Munters 瑞典“蒙特”除湿机Oventrop德国“欧文托普”阀门Panasonic 松下RANCO “宏高”自控REFCOMP意大利“莱富康”压缩机RIDGID 美国“里奇”工具RUUD美国“路德”空调RYODEN “菱电”冷却塔SanKen “三垦”变频器Samsung 三星SANYO 三洋SASWELL英国森威尔Schneider 施耐德SenseAir 瑞典“森尔”传感器SIEMENS 西门子SINKO "新晃“空调SINRO “新菱”冷却塔STAND “思探得”加湿器SWEP 舒瑞普TECKA “台佳”空调Tecumseh“泰康”压缩机TRANE 特灵TROX德国“妥思”VASALA芬兰“维萨拉”传感器WILO德国“威乐”水泵WITTLER 德国”威特”阀门YORK 约克ZENNER德国“真兰”计量MAU -- Make-up Air handling Unit 没见过~应该也是空气处理机组之意AHU -- Air Handling Unit 空气处理机组一般是组合型空调箱,洁净行业用得较多RCU -- Recirculation Unit 循环机组没见过~FCU -- Fan Coil Unit 风机盘管比较常见RA -- Return Air / RAC 回风 ---SA送风 EA排风PAU -- Precision Air Unit 一般用来表示新风机组.FFU--Fan Filter Unit 风机过滤单元机组,用在洁净室送风FMU--Fan Module Unit 模块式风机单元用在洁净室送风MAU -- Make-up Air handling Unit 全新风处理机组洁净用AHU -- Air Handling Unit 普通空气处理机组RCU -- Recirculation Unit 循环空气处理机组送回风混合处理RAC 还是不知道什么东西 Return Air Coil ????? 有这东西吗MAU -- Make-up Air handling UnitAHU -- Air Handling UnitRCU -- Recirculation UnitFCU -- Fan Coil UnitRA -- Return Air / RAC 不知道什么PAU -- Precision Air UnitDCC Dry cooling coil 干盘管(干式盘管)FFU Fan filter unit 风机过滤单元MAU Make up air hundling unit schedule 新风空调箱AHU Air hundling unit 空气处理单元HEPA High efficiency pariculate air 高效空气过滤器RAC Recirculation air cabinet unit schedule 循环组合空调单元C/R Clean room 洁净室无尘室ULPA Ultra low penetration air filter 超高空气效过滤器AS Air shower 风淋室PB Pass box 传递箱CB Clean bench 净化工作台RD Relief damper 泄压风门单向流洁净室 Unidirectional air flow clean rooms外围护结构负荷 skin-load异程式系统 direct return system水力计算 hydraulic calculation修正系数 correction factor区域供冷 district cooling地源热泵 ground source heat pump计径计数法 particle sizing and counting method运行能耗 operation energy consumption新风供给 fresh air supply气流组织 air distribution蒸汽冷凝水回收 Reclamation of condensate water置换通风 displacement ventilation洁净度 clean class双速电机 two-speed motor空调负荷 air conditioning load消声 noise reduction减振 vibration isolation座椅送风 seat air supply水平串联式 horizontal series type燃油锅炉 oil-burning boiler蒸汽供热管道 steam heating pipe生活热水系统 hot water supply system自然排烟 natural smoke exhaustingAFFI American Frozen Food institute美国冷冻食品学会AIRAH The Australian Institute of Refrigeration, Air conditioning and Heating 澳大利亚制冷空调采暖学会AJCE Association of Japanese Consulting Engineers日本咨询工程师协会ANSI American National Standards Institute美国国家标准学会ARI Air-conditioning and Refrigeration Institute美国空调冷冻工业协会ARWI Air-conditioning & Refrigeration Wholesalers International Association国际空调与制冷批发商协会ASA American Standards Association美国标准协会ASHRAE American Society of Heating, Refrigerating and Air-conditioning Engineers 美国采暖、制冷与空调工程师学会ASRE American Society of Refrigerating Engineers美国制冷工程师学会FCU 风机盘管 fan coil unitAHU 空气处理单元 air handling unitFAU 新风处理单元 fresh air unitHVAC 供热通风与空气调节 heating ventilating and air conditioning单向流洁净室 Unidirectional air flow clean rooms外围护结构负荷 skin-load异程式系统 direct return system水力计算 hydraulic calculation修正系数 correction factor区域供冷 district cooling地源热泵 ground source heat pump计径计数法 particle sizing and counting method运行能耗 operation energy consumption新风供给 fresh air supply气流组织 air distribution蒸汽冷凝水回收 Reclamation of condensate water置换通风 displacement ventilation洁净度 clean class双速电机 two-speed motor空调负荷 air conditioning load消声 noise reduction减振 vibration isolation座椅送风 seat air supply水平串联式 horizontal series type燃油锅炉 oil-burning boiler蒸汽供热管道 steam heating pipe生活热水系统 hot water supply system自然排烟 natural smoke exhausting。
fmu联合仿真的实现原理

fmu联合仿真的实现原理FMU联合仿真的实现原理1. 引言在仿真领域,FMU(Functional Mock-up Unit)是一种常用的模型交换格式,它允许不同建模工具之间的模型互操作。
FMU联合仿真则是利用多个FMU实现系统级仿真的方法。
本文将从浅入深,介绍FMU 联合仿真的实现原理。
2. 什么是FMUFMU的定义FMU是一种用于描述仿真模型的标准文件格式,它包括模型的描述信息和模型的数学公式。
FMU具有可移植性和可重用性的特点,可以在不同的仿真环境中进行模型的交互和调用。
FMU的组成一个FMU文件由两部分组成:•模型描述文件():包含模型的结构、参数、变量和初始值等信息。
•模型二进制文件():包含模型的数学公式和仿真算法。
3. FMU联合仿真的概念FMU联合仿真是指将多个FMU集成到一个系统级仿真环境中,进行整体的仿真分析。
不同的FMU可以代表不同的子系统或组件,通过联合仿真,可以模拟整个系统的行为和性能。
4. FMU联合仿真的实现原理模型交互不同的FMU之间如何进行模型的交互是FMU联合仿真的关键。
一般而言,有两种主要的方法用于实现FMU之间的模型交互:•耦合方法:将不同FMU的接口连接起来,通过端口或信号进行数据交换。
这种方法适用于模型之间存在明确的依赖关系的情况。
•迭代方法:通过迭代计算的方式,将FMU的输出作为输入传递给其他FMU进行计算。
每轮迭代中,FMU之间的数据会不断更新,直到达到收敛条件。
这种方法适用于模型之间存在复杂的相互影响关系的情况。
仿真调度在FMU联合仿真过程中,需要对各个FMU的仿真时间进行调度,确保它们按照正确的时间步长进行计算。
常用的调度算法包括:•同步调度:所有FMU的仿真时间步长相同,按照相同的时间间隔进行计算。
•异步调度:不同FMU的仿真时间步长可以不同,根据各自的计算要求进行时间调度。
仿真协同在FMU联合仿真中,不同的FMU之间可能存在耦合和协同的关系。
Functional Mockup Unit(FMU)软件开发工具包(SDK)2.0.6说明书

FMU SDK 2.0.6The FMU SDK is a free software development kit provided by Synopsys. The FMU SDK demonstrates basic use of Functional Mockup Units (FMUs) as defined by the following specifications •Functional Mock-up Interface for Model Exchange and Co-Simulation 2.0 (July 25, 2014)•Functional Mock-up Interface for Model Exchange 1.0 (January 26, 2010)•Functional Mock-up Interface for Co-Simulation 1.0 (October 12, 2010)The FMI specifications are available from here. The FMU SDK can also serve as starting point for developing applications that create or process FMUs.For each of the supported FMI versions (currently 1.0 and 2.0), the FMU SDK contains the C sources for various discrete and continuous FMU models, a batch file for compiling and zip'ing these models, an XML parser for parsing the model description of an FMU and two simple simulation programs that run a given FMU and output the result as CSV file.For bug reports, questions or comments regarding the FMU SDK, please mail to ***********************. Questions or comments regarding the FMU specification should be sent to info@.Table of Contents•Building and Installing the FMU SDK•Simulating an FMU•Creating your own FMUs•FMU SDK Revision history•License conditionsInstalling the FMU SDKThe FMU SDK runs on all 32 bit and 64 bit Windows platforms, Linux and Mac OS X platforms. Unzip the file in a directory where you have write access. That directory is called FMUSDK_HOME below and may contain white space, such as in "C:\Program Files\fmusdk". The FMU SDK contains only the C sources of the FMUs and the simulators, not the executables, and should compile on all Windows, Linux and Mac OS X platforms.To build Windows 32 bit versions of all FMUs and simulators of the FMU SDK, double click on FMUSDK_HOME\install.bat. This should create fmus in FMUSDK_HOME\fmu10\fmu andFMUSDK_HOME\fmu20\fmu, as well as four simulators in FMUSDK_HOME\fmu10\bin and FMUSDK_HOME\fmu20\bin.To build Windows 64 bit versions of all FMUs and simulators, open a command shell and run "install -win64". This creates additional fmus in the x64 subdirectories in FMUSDK_HOME\fmu10\fmu and FMUSDK_HOME\fmu20\fmu, as well as additional simulators in FMUSDK_HOME\fmu10\bin\x64 andFMUSDK_HOME\fmu20\bin\x64. Building these 64 bit versions works also on 32 bit Windows platforms. Execution of the 64 bit simulators and fmus requires however a 64 bit version of Windows. Compilation using install.bat requires that you have installed one of Microsoft Visual Studio 2005 (VS8), 2008 (VS9), 2010 (VS10), 2012 (VS11), 2013 (VS12) or 2015 (VS14), for example the free Express Edition. To compile with another compiler, adapt the batch files.To build Linux or Mac OS X binaries of all FMUs and simulators, open command shell and run "make". The build requires that you have installed the C and C++ compilers, libexpat and libxml2 libraries. To install these dependencies on Linux you can use a package manager like "sudo apt install g++", "sudo apt install libexpat1-dev", "sudo apt install libxml2-dev".Simulating an FMUOn Windows, to run a given FMU with one of the FMU simulators, open a command shell in directory FMUSDK_HOME and run the command fmusimfmusim simulator model.fmu [tEnd [h [loggingOn [csvSeparator]]]] [-win64]simulator ..... cs10 or cs20 for co-simulation, me10 or me20 for model exchange, requiredmodel.fmu ..... path to FMU, relative to current dir or absolute, required tEnd .......... end time of simulation, optional, defaults to 1.0 sech ............. step size of simulation, optional, defaults to 0.1 secloggingOn ..... 1 to activate logging, optional, defaults to 0csvSeparator .. c for comma, s for semicolon, optional, defaults to c-win64 ........ to use a 64 bit simulator. By default, the 32 bit version is usedThis unzips the given FMU, parses the contained modelDescription.xml file, simulates the FMU from t=0 to t=tEnd, and writes the solution to file 'result.csv'. The file is written in CSV format (comma-separated values), using ';' to separate columns and using ',' instead of '.' as decimal dot to print floating-point numbers. To change the result file format, use the 'csv separator' option. The logging option activates logging of the simulated FMU. The FMI specification does not specify, what exactly to log in this case. However, when logging is switched on, the sample FMUs of the FMU SDK log every single FMU function call. Moreover, the fmusim simulators log every step and every event that is detected. Example command:> fmusim me10 fmu10/fmu/me/bouncingBall.fmu 5 0.1 0 sFMU Simulator: run 'fmu/bouncingBall.fmu' from t=0..5 with step size h=0.1, loggingOn=0, csv separator=';'Simulation from 0 to 5 terminated successfulsteps (51)fixed step size .. 0.1time events 0state events (14)step events 0CSV file 'result.csv' writtenOn Linux and Mac OS X get inspired by run_all target inside FMUSDK_HOME\makefile.To plot the result file, open it e.g. in a spread-sheet program, suchas Miscrosoft Excel or OpenOffice Calc. The figure below shows the result of the above simulation when plotted using OpenOffice Calc3.0. Note that the height h of the bouncing ball as computed byfmusim becomes negative at the contact points, while the true solution of the FMU does actually not contain negative height values. This is not a limitation of the FMU, but of fmusim_me, which does not attempt to locate the exact time of state events. To improve this, either reduce the step size or add your own procedure for state-event location to fmusim_me.Creating your own FMUsThe FMU SDK contains a few sample FMUs•dq the Dahlquist test function x = -k der(x)•inc increments an integer counter every second•values demonstrates the use of all scalar FMU data types•vanDerPol ODE with 2 continuous states•bouncingBall a bouncing ball that defines state eventsTo implement your own FMU using the FMU SDK, create a directory - say xy - in FMUSDK_HOME\fmu10\src\models, orFMUSDK_HOME\fmu20\src\models, and create files xy.c there. The name of the new directory and of the .c file must be the same. The content of the .c file should follow the existing FMU examples, see the comments in the example code. For FMI 1.0, add also file modelDescription.xml. The XML file must not containthe <implementation> element and the closing <fmiModelDescription> tag, because this is added automatically during build. For FMI 2.0, add file modelDescription_cs.xml and modelDescription_me.xml. When done with editing xy.c and the xml file (or files), open a command shell in FMUSDK_HOME\fmu10\src\models or inFMUSDK_HOME\fmu20\src\models to run the build command.On Windows, run command build_fmu me xy to build an FMU for model-exchange, or build_fmu cs xy to build an FMU for co-simulation. This should create a 32 bit FMU file xy.fmu in the corresponding subdirectory of FMUSDK_HOME\fmu10 or FMUSDK_HOME\fmu20. To build a 64-bit FMU, append option -win64 to the build command. For Linux and Mac OS X get inspired by all target insideFMUSDK_HOME\fmu10\src\models\makefile andFMUSDK_HOME\fmu20\src\models\makefile.The figure below might help to create or process the XML file modelDescription.xml. It shows all XML elements (without attributes) used in the schema files (XSD) for model exchange and co-simulation 1.0. Notation: UML classdiagram.For the case of FMU 2.0, see the corresponding overview figure in the FMI specification 2.0.FMU SDK Revision history•07.02.2010, Version 1.0o First releaseo demo FMI for Model Exchange 1.0•05.03.2010, Version 1.0.1o demo FMI for Model Exchange 1.0o bug-fix in fmuTemplate.c: fmiSetString now copies the passed string argument and fmiFreeModelInstance freesall string copieso fmusim/main.c: removed strerror(GetLastError()) from error messages•22.08.2011, Version 1.0.2o demo FMI for Model Exchange 1.0 and FMI for Co-Simulation 1.0o added support for FMI for Co-Simulation 1.0 (standalone, no tool coupling)o bug-fix in fmusim/main.c: added missing calls tofmiTerminate and fmiFreeModelInstance•07.03.2014, Version 2.0.0o demo FMI for versions 1.0 and 2.0 RC1o added support for FMI 2.0 RC1o added 64 bit supporto more compilers recognized by the installer•16.04.2014, Version 2.0.1o bug-fix in modelDescription.xml files: remove alias parameter, add derivative attribute to suitable variables o bug-fix in fmu20/fmuTemplate.c: allow modules to request termination of simulation, better time eventhandling, initialize() moved from fmiEnterInitialization tofmiExitInitialization, correct logging message format infmiDoStepo bug-fix in Co-Simulation and Model Exchange simulators: set fmu location for 1.0 and fmu resources location for2.0 at instantiation of model•02.07.2014, Version 2.0.2o added support for FMI 2.0 RC2o remove support for exporting FMI 2.0 RC1. Co-Simulation and Model Exchange simulators still support FMI 2.0 RC1 o fmi2setDebugLogging called with 0 categories, set all categories to loggingOn value•27.08.2014, Version 2.0.3o track all states of Model-exchange and Co-simulation and check the allowed calling sequences for FMI 2.0 o added explicit 'isTimeEvent' parameter for eventUpdate function in the user's modelso lazy computation of computed valueso bug-fix in modelDescription.xml: set initial attribute to local and output variables, add unknown variables in<ModelStructure><InitialUnknowns> section•20.10.2015, Version 2.0.4o added explicit 'isNewEventIteration' parameter for eventUpdate function in the user's modelso bouncingBall example improvement: demonstrate tunable parameters, avoid 'fall through effect' due to numericalcalculationo bug-fix: allow to declare real variables and zero states ina modelo bug-fix: allow to simulate FMI 2.0 RC1 modelso bug-fix: remove memory leaks and compilation warnings •8.12.2017, Version 2.0.5o added support for Linux and Mac OS X. Thanks toChristopher Brooks (https:///cxbrooks) o added support for building with Microsoft VS 2015o location of simulators changes toFMUSDK_HOME\fmu10\bin andFMUSDK_HOME\fmu20\bin instead of FMUSDK_HOME\bin o fmu20 build define DISABLE_PREFIX to not use prefixed FMI functionso fmu20 models declare source files inModelDescription.xmlo log error messages regardless of loggingOn flag when functions return fmi2Erroro bug-fix: allow to declare real variables and zero states •20.07.2018, Version 2.0.6o update libxml2.lib to work for windows 7 and Visual Studio 2013 and 2015o linux - give exec right to build_fmu.sh before executing ito copy .h model files with rsync to avoid missing file error License conditionsThe FMU SDK is provided by QTronic under the BSD License.FMU SDK licenseCopyright © 2008-2019, Synopsys, Inc. All rights reserved.The FmuSdk is licensed by the copyright holder under the BSD License(/licenses/bsd-license.html):Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:- Redistributions of source code must retain the above copyright notice,this list of conditions and the following disclaimer.- Redistributions in binary form must reproduce the above copyright notice,this list of conditions and the following disclaimer in the documentationand/or other materials provided with the distribution.THIS SOFTWARE IS PROVIDED BY SYNOPSYS INC. "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIESOF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED.IN NO EVENT SHALL SYNOPSYS INC. BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.The following additional tools are distributed with the FMU SDK under their respective licenses•7z 4.57 by Igor Pavlov. Used here to zip and unzip FMUs, license is here.•eXpat 2.0.1 by James Clark. Used here to parse the modelDescription.xml file of an FMU 1.0, license is here.•libxml, the XML C parser and toolkit of Gnome. Used here to parse the modelDescription.xml file of an FMU 2.0, licenseis here.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FMU-04区域管理器使用说明
一、产品简介
FMU-04区域管理器,是BSH2000综合计费管理系统的现场管理单元。
通过M-BUS网络与管理中心、信号采集器互连,与LMS系列软件配套使用,监控和记录SSU的状态,并对SSU及控制单元实施控制,具有强大的数据处理及通讯能力。
二、结构与尺寸图
图1
三、技术参数
1.环境大气压力:86kPa~106kPa
2.工作环境湿度:0%~85% RH无凝结
3.工作环境温度:5℃~55℃
4.贮存环境温度:-25℃~70℃
5.M-BUS通信网段点对点最大长度:1200米
6.通讯波特率:M-BUS输出2400bps
7. M-BUS输入4800bps
8.额定电压:AC220V±
10%/50Hz
9.防护等级:IP50
10.容量:管理254台M-BUS网络仪表
四、安装
FMU可采用挂墙安装的方式,离地1.5米左右,以便于日后的调试和维修。
FMU安装应选择干燥和通风条件良好的地点,避免雨水等潮湿环境和腐蚀性的气体环境中。
不能安装在有强磁场干扰地方和大型机电设备附近,适宜安装在弱电设置的专用环境中。
使用线材:电源线—RVV2×1.0mm2 铜芯线,网络线—RVV2×1.0mm2铜芯线,信号线-RVV3×0.75mm2 铜芯线。
五、内部接线图与接线端子说明
FMU内部接线图如图2、图3所示。
图2是不带空调主机检测功能的内部接线图。
图3是带有空调主机检测功能的内部接线图。
图2
图3
FMU-04模块的接线端子主要有:
1.与PC机通信的接线端子(PC):FMU04作为MBUS总线的从机,通信线接19脚(MBUS1)、
20脚(MBUS2),两线没有极性之分。
2.与表通信的接线端子(Meter):FMU04作为MBUS总线的主机,必须接MBUS中继器。
通
信线接5脚(GND)、15脚(MBUS1)、16脚(MBUS2),MBUS1、MBUS2有极性之分。
3.电源接线端子:FMU04的电源使用24V交流电电源,从9脚、10脚输入,不分极性。
4.检测信号接线端子:检测信号:空调主机状态检测。
4脚(IN1)输入信号,3脚(GND)
脚作为信号地。
(注:配置中空调冷量分配恒温表T07B和冷量分配模块T06B时使用)
5.复位按钮Reset: FMU04复位按钮,按下Reset按钮,FMU04复位。
6.S1,S2按钮,除在在生产调试中用,没有其它功能。
7.FMU04模块交流24V供电,功率1.8W~2.5W
六、指示灯说明
B LED指示灯:指示USB接口的工作情况,暂时没有使用。
2.Scan指示灯:自动抄表指示灯。
设为允许自动抄表时,常亮几秒钟;开始自动抄表后,每抄一
个表,灯闪一次;设为禁止自动抄表时,灯常灭。
当在工程调试模式下,闪得快(约5Hz);在正常工作模式下闪得慢(随设定的间隔时间而变,最快1Hz,最慢1/255Hz)。
3.FMU Status指示灯: FMU状态指示灯。
当FMU04没有初始化(当然也没有添加任何表)时,
指示灯常亮;当FMU04已初始化但未添加任何表的时候,指示灯以10Hz的频率闪;当FMU04已初始化,也已添加1个或1个以上的表,指示灯以1Hz的频率闪。
4.PC Com指示灯:当PC机与FMU04通信时,PC Com指示灯闪烁。
5.Meter Com指示灯:当FMU04机与表通信时,Meter Com指示灯闪烁。
七、外部接线图
图4
八、软件设置
1、设置FMU-04地址
图5
1.在左边选择要设置的FMU地址。
2.在右边“高级功能”选择“修改FMU地址”。
3.单击“发送命令”按钮。
4.输入高级功能密码,设置完成。
2、设置FMU运行模式与抄表间隔
图6
1.选择要操作的FMU地址。
方法同设置FMU地址。
2.选中“设置FMU运行模式”。
3.选择工程调试模式或正常运行模式。
4.单击“发送命令“按钮。
5.输入高级功能密码,设置完成。
6.设置FMU抄表间隔的方法与设置FMU运行模式相同,不再重复。
数值在1~255秒,默认值20秒。
注意:在工程调试时设FMU运行模式为工程调试模式可以加快调试过程。
调试人员调试完成后将工程调试模式转到正常运行模式。
FMU-04本身有自动从工程调试模式切换到正常运行模式的功能,但处在工程调试模式的时间较长,推荐调试人员要手动切换,以节省被抄表的电池电量。
当工程调试过程中,发现网络通讯变慢,应检查FMU是否自动转入正常运行模式。
工程模式自动转入正常模式的时间的长短决定于表数量和通讯成功率。
如果是254个表,每个表通信良好的情况下,时间是7.5小时左右; 254个表都不通信情况,最长时间是47.5小时。
3、读取FMU设置
图7
1.选择要操作的FMU地址。
方法同设置FMU地址。
2.选中“读取FMU设置”。
3.单击“发送命令”按钮。
4.输入高级功能密码,可读取到“工作模式”和“抄表间隔”时间。