武汉理工大学-计算机仿真实验作业答案
计算机仿真习题及答案
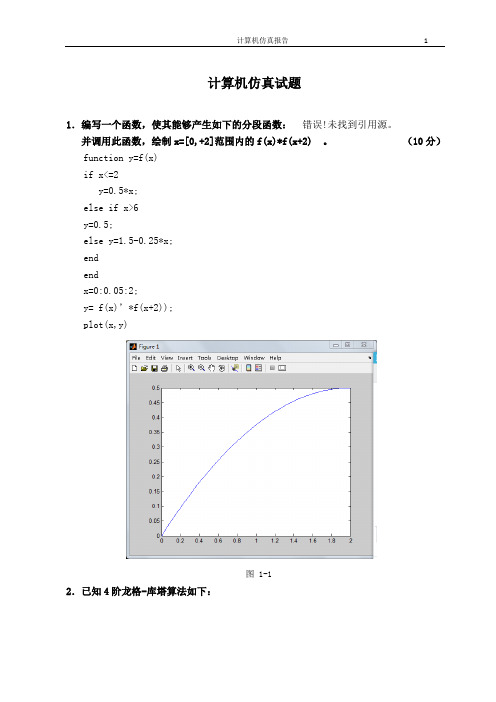
计算机仿真试题1.编写一个函数,使其能够产生如下的分段函数:错误!未找到引用源。
并调用此函数,绘制x=[0,+2]范围内的f(x)*f(x+2) 。
(10分)function y=f(x)if x<=2y=0.5*x;else if x>6y=0.5;else y=1.5-0.25*x;endendx=0:0.05:2;y= f(x)’*f(x+2));plot(x,y)图 1-12.已知4阶龙格-库塔算法如下:试利用该算法求解以下微分方程:(15分)本题可以调用MATLAB函数中龙格-库塔算法函数ode45,首先编写m文件:function dy=func(x,y)dy=-y+1;end再在主窗口调用此文件:[x,y]=ode45('func',[0,5],0)%这里的[0,5]为任取区间,表示方程在此范围的解。
运行结果如下:x =0.00010.00010.00020.00020.00050.00070.00100.00120.00250.00370.00500.00620.01250.01880.02510.0313 0.06270.09410.12550.15690.28190.40690.53190.65690.78190.90691.03191.15691.28191.40691.53191.65691.78191.90692.03192.15692.28192.40692.53192.65692.78192.90693.03193.15693.28193.40693.53193.65693.78193.90694.03194.15694.28194.40694.53194.65694.74274.82854.91425.0000y =0.00010.00010.00020.00020.00050.00070.00100.00120.0025 0.0037 0.0050 0.0062 0.0124 0.0186 0.0248 0.0309 0.0608 0.0898 0.1180 0.1452 0.2457 0.33430.41250.48160.54250.59630.64370.68550.72250.75510.78390.80930.83170.85150.86890.88430.89790.90990.92050.92980.93810.94540.95180.95740.96240.96690.97080.97420.97720.97990.98230.98430.98620.98780.98920.99050.99130.99200.99270.9933为只管起见,我们使用函数命令画出x-y(plot(x,y))的关系如下图:图1-23.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(15分)(1)G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦uy= [0 2 0 2] X解:(1)a)求对应状态方程参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [A,B,C,D]=tf2ss(num,den) 运行结果:A =-10 -35 -50 -241 0 0 00 1 0 00 0 1 0B =1C =1 7 24 24D =故,状态方程为:.X = x+ uY=[1 7 24 24]xb)求对应零极点增益模型参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [Z,P,K]=tf2zp(num,den) 运行结果如下: Z =-2.7306 + 2.8531i -2.7306 - 2.8531i -1.5388P = -4.0000 -3.0000 -2.0000 -1.0000K = 1故变换后的零极点模型为: G(s)=c)求对应部分分式型:num=[1 07 24 24]; den=[1 10 35 50 24]; [R,P,H]=residue(num,den) 运行结果如下: R =4.0000 -6.0000 2.0000 1.0000P =-4.0000 -3.0000 -2.0000 -1.0000H = []故变换后的部分分式模型为:11223644)(+++++-+=s s s s s G(2)由题给条件,知:A=[2.25 -5 -1.25 -0.5; 2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1;1.25 -1.75-10 -35 -50 -24 1 0 0 0 0 1 0 0 0 0 1 010 0 0-0.25 -0.75] B=[4;2;2;0] C=[0 2 0 2],D=0 a)求传递函数矩阵: [num,den]=ss2tf(A,B,C,D) 运行结果为: num =0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.25002.2500 故,所对应传递函数模型为:25.225.525.641522144)(23423+++++++=s s s s s s s s Gb)求零极点模型:num=[0 4 14 22 15];en=[1 4 6.25 5.25 2.25]; [Z,P,K]=tf2zp(num,den) 运行结果为: Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000 P =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iK =4.0000故,零极点模型为:)866.05.0()5.1()2247.11)(5.1(4)(2i s s i s s s G ±++±++=c)求对应部分分式模型: [R,P,H]=residue(num,den) 运行结果为: R =4.0000 -0.0000-0.0000 - 2.3094i -0.0000 + 2.3094iP =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iH = []故变换后的部分分式模型为:i s ii s i s s G 866.05.03094.2866.05.03094.25.14)(+++-+-++=4.已知一单位反馈系统开环传递函数为:,试绘制系统Nyquist图,判断闭环系统的稳定性,并求其单位阶跃响应。
智慧树答案计算机仿真技术知到课后答案章节测试2022年

第一章1.计算机仿真系统的三要素()答案:计算机、模型、系统2.系统研究一般有哪些方法()答案:仿真实验法;理论解析法;直接实验法3.哪些是以硬件为基础的仿真软件( )答案:Proteus4.欠实时仿真,仿真时钟比实际时钟慢。
例如烟火爆炸的仿真分析。
答案:对5.计算机仿真算法的误差主要有()答案:截断误差;舍入误差第二章1.MATLAB软件中,下面哪个命令是用来显示当前文件夹中文件名字的()答案:what2.下面这些哪个是属于元素群运算(点运算)()答案:exp(x)3.哪个是以硬件为基础的仿真软件( )答案:Proteus4.MATLAB是(矩阵实验室),其基本变量是矩阵,其数值元素的格式只有双精度(double)这种形式存在于MATLAB的workpace空间中。
答案:错5.在MATLAB中,运行以下代码,b的结果是()a=[1,0;1,0];b=all(a)答案:[1,0]第三章1.MATLAB中代码文件中边表明文件为函数文件的关键字是()答案:function2.在MATLAB的命令窗口中,运行以下代码,b的结果是()a=[1,0,1,0];forn=ax=n(1)&n(2);end答案:出现错误提示3.在MATLAB的fig窗口中,可以直接打开以下()格式的图形文件答案:fig4.在MATLAB中,对于m函数文件,下面的描述不正确的是()答案:m函数文件是不能够被simulink来调用的5.全局变量是共有变量,在函数文件中不能够直接访问,需要设置一个输入参数才能访问。
答案:错第四章1.以下说法不正确的是()答案:不同幂次的两个多项式不能进行乘法运算2.当实验或测试所获得的样本数据有误差时,适合用来估算数据的方法是()答案:曲线拟合3.若在MATLAB中已有语句a=sym(1); b=1; x=sym('b'),则以下叙述正确的是()答案:a是符号常量,x是符号变量4.若使用命令taylor(f,x,1,'Order',6)对f进行泰勒展开,则展开式的最高阶为()答案:55.在命令行窗口输入下列命令,则命令执行后的输出结果是()>>f=sym(1);>> eval(int(f,1,4))答案:3第五章1.启动Simulink的方法有()答案:在命令行窗口中输入simulink命令;在“主页”选项卡中单击“文件”命令组中的“新建”命令按钮;在“主页”选项卡中单击SIMULINK命令组中的“Simulink”命令按钮2.在一个模型窗口上按住一个模块并同时按Shift键移动到另一个模型窗口,则()答案:在两个模型窗口都有这个模块3.为子系统定制参数设置对话框和图标,使子系统本身有一个独立的操作界面,这种操作称为子系统的()答案:封装4.已知仿真模型如图所示,各模块参数均采用默认设置,则示波器的输出波形是()答案:5.以下关于S函数的描述中,正确的有()答案:S函数有现成的模板程序;S函数模块能够被封装;利用S函数可以对Simulink模块库进行扩充第六章1.下列对象中,哪一个不属于MATLAB控制系统工具箱中规定的LTI对象?()答案:极点留数对象2.tf2zpk函数的作用是?()答案:零极点增益模型转换为状态空间模型3.在MATLAB命令窗口运行如下代码,返回结果为:()>>sys = drss(3,4);isct(sys)答案:14.求系统sys的阶跃相应,返回系统的输出和状态,step函数的调用格式为:()答案:[y,t,x]=step(sys)5.给定开环系统模型作波特图,频率向量w自动给出,作波特图,并在图上标注幅值裕度Gm和对应的频率wg,相位裕度Pm和对应的频率wp,所用函数及调用格式为:()答案:margin(sys)第七章1.在MATLAB的m文件中,可以将滞后环节转化为有理数形式的函数是?()答案:pade2.在simulink中,有多种PID模块,其中下面哪一个是离散的PID模块()答案:;3.在MATLAB的m文件中,LTI对象中属于滞后特征的属性是( )答案:Outputdelay;IOdelay;Inputdelay4.simulink中,PID模块中的只有Kp,Ki,Kd三个参数可以设置。
武汉理工大学-计算机仿真实验作业答案.
五、(10分已知系统的传递函数为6168682(232+++++=s s s s s s G 。
语言建立系统传递函数模型,并求:⑴该系统的单位阶跃响应;(2分⑵输入函数为u(t时的响应;(3分(u(t正弦信号,周期2秒,仿真时间8秒,采样周期0.1;(3 输入函数为u(t时的响应;(3分(u(t方波输入信号,周期10秒,仿真时间20秒,采样周期0.05 (4 绘出系统的波德图(Bode 。
(2分解答:num=[2 8 6];den=[1 8 16 6];sys=tf(num,den;t=0:0.1:8;y1=step(sys,t;u=sin(t*pi;y2=lsim(sys,u,t;subplot(2,2,1;plot(t,y1;grid;title('阶跃响应曲线';xlabel('响应时间';ylabel('响应值';hold on;subplot(2,2,2;plot(t,y2;grid on ;title('对sin(t的响应曲线'; xlabel('响应时间';ylabel('响应值';t=0:0.05:20u=square(pi/5*ty3=lsim(sys,u,t;subplot(2,2,3;plot(t,y3grid on ;title('对方波信号的响应曲线'; xlabel('响应时间';ylabel('响应值';subplot(2,2,4;bode(sys;grid ;title('bode 图';运行结果:六、(10分设二阶动力学系统的传递函数如下,假设将无阻尼固有频率固定为ωn =1 rad/s ,将阻尼比的值分别设置成ζ=0,0.1,0.2,0.3,…, MATLAB 语言编程,分析在这些阻尼比ζ的取值下该系统的阶跃响应。
《计算机仿真技术》试卷B(含答案)

《计算机仿真技术》考试试卷(B 卷)班级 姓名 学号一.填空题。
(每空1分,共20分)1、计算机仿真技术三要素是_______________、_________________、________________。
2、计算机仿真中模型能够代表系统来进行研究,模型主要有________________、________________、________________、________________等几类模型。
3、叙述simulink 中常见的固定步长的仿真算法有:________________、________________、________________、________________。
(任举四种)4、MATALB 主要相似性主要包含以下几种相似_________________、________________、___________________。
5、Simulink 中主要包含_________________、________________、_______________等几种模块。
6、符号运算中,泰勒级数计算的函数是________________,拉普拉斯变换的函数________________,傅里叶级数的计算函数是________________。
二.简答题。
(本题5小题,每题8分,共40分)1、简述根据信号类型分类,计算机仿真主要包含哪几种类型。
2、简述蒙特卡洛法建模的步骤。
3、m 函数文件和m 文本文件之间的区别。
4、叙述三维立体绘图常用的几个绘图指令及其功能。
5、简述matlab 软件的基本组成三.编程题 (本题6小题、共40分)根据下面要求,只需写出程序代码,不需计算结果和图形。
1、(5分)写出右面的矩阵D ,求出其大于4的元素有几个,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=059123107D并通过变量列出其在矩阵的位置和序号2、(5分)求解下面矩阵A 的行列式和逆矩阵,并利用命令取出系数矩阵的逆矩阵的第二行的数据,以小数点后面两位数值的形式显示出来。
武汉理工大学过程仿真与建模作业

实验一 面向方程的数值积分方法仿真一 、实验目的:加深理解四阶龙格---库塔法的原理及其稳定性二、 实验内容 对下列系统进行仿真 A . 线性定常系统'24(0)1u μμ=-⎧⎨=⎩ (01)t <≤B . 非线性系统()()()()()()()()dx t rx t ax t y t dtdy t sy t bx t y t dt⎧=-⎪⎪⎨⎪=-+⎪⎩其中:1. r=0.001,a=2*104, s=0.015, b=10-4; x(0)=1200, y(0)=6002. r=0.001,a=2*10-6, s=0.01, b=10-6; x(0)=12000, y(0)=6000三、实验要求:1. 为保证稳定性,分析系统(1)的最大仿真步长(方法自选)2. 设计MatLab 、Fortran 或C 程序,用四阶龙格---库塔法进行仿真计算,改变参数及仿真步长,观察实验结果,寻找最合宜的仿真步长和临界仿真步长;四、实验报告1. 实验所用程序清单2. 实验结果及分析1.分析系统A 的最大仿真步长,寻找临界仿真步长1.1四阶阶龙格—库塔的稳定性四阶龙格—库塔格式为:11234(22)6n n hu u K K K K +=++++ 其中1(,)n n K f t u = 2112(,)2n n hK f tu K +=+ 3122(,)2n n hK f tu K +=+ 413(,)n n K f t u hK +=+ 由于'24u u =-,则有2233411(63)64n n n h u u h h h u λλλλ+=++++为保证龙格—库塔的稳定性,则有1n n u u +≤,从而可以得223341(63)64n n n h u h h h u u λλλλ++++≤1.2通过编程求最大稳定步长clear allsyms K1 K2 K3 K4 y h y1=-24*y;y1=inline(y1); K1=y1(y);K2=y1(y+1/2*K1*h); K3=y1(y+1/2*K2*h); K4=y1(y+h*K3);R1=K1+2*K2+2*K3+K4; R11=inline(R1); R=solve(R1,'h'); R=eval(R); p=R==real(R); R=R(p);fprintf('保证稳定性的最大仿真步长为%0.5f\n',R) 结果显示为:1.3改变参数及仿真步长,观察实验结果MATLAB编写程序作图以步长h=0.025为例:clear allsyms K1K2K3K4y hy1=-24*y;y1=inline(y1);K1=y1(y);K2=y1(y+1/2*K1*h);K3=y1(y+1/2*K2*h);K4=y1(y+h*K3);R1=K1+2*K2+2*K3+K4;R11=inline(R1);h=0.025f=1;for ii=1:10t=0.1*ii;tt(ii)=t;n=(t-0)/h;for i=1:nf=f+1/6*h*R11(h,f) ;endff(ii)=f;endplot(tt,ff,'o-')hold ona=legend('步长h为0.025',1)xlabel('t')ylabel('u')1.31寻找临界步长分别取步长h为0.025、0.05、0.075、0.01、0.0125,用MATLAB作出图像0.10.20.30.40.50.60.70.80.9100.010.020.030.040.050.060.070.080.090.1t u步长h 为0.025图1,步长h 为0.025时,u 的值0.10.20.30.40.50.60.70.80.9100.020.040.060.080.10.12tu步长h 为0.05图2,步长h 为0.05时,u 的值0.10.20.30.40.50.60.70.80.9100.050.10.150.20.250.30.35tu步长h 为0.075图3,步长h 为0.075时,u 的值0.10.20.30.40.50.60.70.80.9100.10.20.30.40.50.60.7tu步长h 为0.1图4,步长h 为0.1时,u 的值0.10.20.30.40.50.60.70.80.9100.511.522.533.5x 105tu步长h 为0.125图5,步长h 为0.125时,u 的值由图1-5可知,临界步长在0.1~0.125之间 为了方便分析,计算A 方程的真实值,并作图 clear all t=0.1:0.1:1 u=exp(-24*t) plot(t,u,'o-') legend('真实值',1) xlabel('t') ylabel('u') 运行得到图6:0.10.20.30.40.50.60.70.80.9100.010.020.030.040.050.060.070.080.090.1t u真实值图6,u 的真实值在0.1~0.125附近步长,得到图7如下:图7 比较真实值和0.1附近步长可以得出结论,最合适仿真步长如果太大,结果不精确。
武汉理工大学微波作业答案及备注

2.8 矩形波导截面尺寸为 a × = b 23 mm ×10mm ,试求: (1)传输模的单模工作频带; ( 2)在 a, b 不变的情况下,如何才能获得更宽的频带?
解:(1)单模传输的工作波长范围: 23mm=a=λTE 20 < λ < λTE10 = 2a = 46mm
即 23mm <
c < 46mm ⇒ 6.52GHz < f < 13.04GHz f
A
Zl = 1 + j 2
短路点
B
0.3125λ
0.324λ
1.17. 特性阻抗为 50Ω 的无耗传输线,终端接阻抗为 Z l =25 + j 75Ω 的负载,采用单并 联短路支节匹配。使用 Smith 圆图和公式计算两种方法求支节的位置和长度。 解: 负载反射系数: Γ l =
Z l − Z 0 25 + j 75 − 50 1 2 = = +j = Z l + Z 0 25 + j 75 − 50 3 3
′
= U in A1e j β l (1 + Γin ) = U l A1e j β 0 (1 + Γl )
故
U l U in e − j β l =
1 + Γl = 424.9∠ − 33.69 (V ) 1 + Γin
(3)负载吸收功率: = Pl
U l∗ 1 1 ∗ Re[U l I l ] Re[ = = U l ∗ ] 138.89 2 2 Zl
2π
λ
1− (
λ 2 ) = 158.77 λc
相速:
2π f ν= ω = = 3.96 × 108 m / s β p β
计算机仿真题库
25. 请比较数值积分法与离散相似法的区别。 数值积分法比较成熟,精度较高,但计算公式复杂,计算量大,适合离线仿真;而离散 相似法计算公式简单,计算量小,速度快,但精度较低,适合在线仿真。 26. 物理仿真 以真实系统的物理性质和几何形状相似为基础而其他性质不变来构造系统的物理模型, 并在物理模型上进行实验的过程称为物理仿真,也称为实体仿真。其优点在于直观、形象; 缺点在于模型改变困难,实验限制较多,投资较大。 27. 虚拟现实 虚拟现实是用高科技手段构造出来的一种人工环境,它具有模仿人的视觉、听觉、触觉 等感知功能的能力,具有使人可以亲身体验沉浸在这种虚拟环境并与之相互作用的能力。 28. 多媒体仿真 将数字、文字、声音、图形、图像和动画等各种媒体有机组合,并与先进的计算机通信 和广播电视技术相结合,形成一个可组织、存储、操纵和控制多媒体信息的集成环境和交互 系统的仿真技术。 29. 根据系统的动态特性,一般可以将系统做哪些分类? 根据系统的动态特性,可以将系统分为: (1)连续系统和离散系统。时间和各个组成部 分的变量都具有连续形式的系统称为连续系统; 全部或一些组成部分的变量具有离散信号形 式的系统称为离散系统。 (2)线性或非线性系统。如果微分方程的系数是常数或者仅仅是自 变量的函数, 则为线性微分方程, 其符合叠加性原理, 可分为线性定常系统, 线性时变系统; 非线性系统用非线性微分方程表示,其不符合叠加原理。 (3)确定系统和随机系统。确定系 统可以用确定的数学模型进行描述, 输出和输入变量之间有完全确定的函数关系; 随即系统 则指系统内部或环境变量发生不确定变动, 会影响输出变量。 (4) 单变量系统和多变量系统。 这是对输入输出变量个数而言的。 30. 在连续系统的数字仿真中, 仿真算法的选择一般为考虑什么?常用的仿真算法有哪些? 在连续系统的数字仿真中,选择仿真算法一般会考虑求解精度、速度、数值稳定性、自 启动能力、步长等。常用的仿真方法有:欧拉法、四阶龙格-库塔法、离散相似法等。欧拉 法属于自启动算法,适用于线性系统和非线性系统,方法简单,但误差的积累导致求解精度 降低。四阶龙格库塔法也属于自启动算法,适用于线性和非线性系统,支持单步长和可变步 长,求解速度和精度较高,但仿真时间较长。离散相似法一般用于状态方程,按环节离散相 似法可用于非线性系统,按系统离散相似法仅限于线性系统。 31. 什么是实时仿真?什么情况下需要进行实时仿真?它在算法上有什么要求? 实时仿真是指仿真模型的时间比例尺等于系统原模型的时间比例尺的一类仿真,对系统 进行仿真试验时,如果仿真系统有实物,由于实物和人是按真实时间变化和运动的,因此就 需要进行实时仿真。实时仿真要求仿真系统接收实时动态输入,并产生实时动态输出,输入 和输出通常为固定采样时间间隔的数列。 32. 什么是数值稳定性问题?如何保证计算中的数值稳定性? 所谓的数值稳定性问题,是指在扰动影响下,其计算过程中误差的积累是否受到控制的 问题。要保证数值稳定性,应遵循两条原则: (1)保证计算稳定; (2)有一定的计算精度来 选择合理的计算步长。
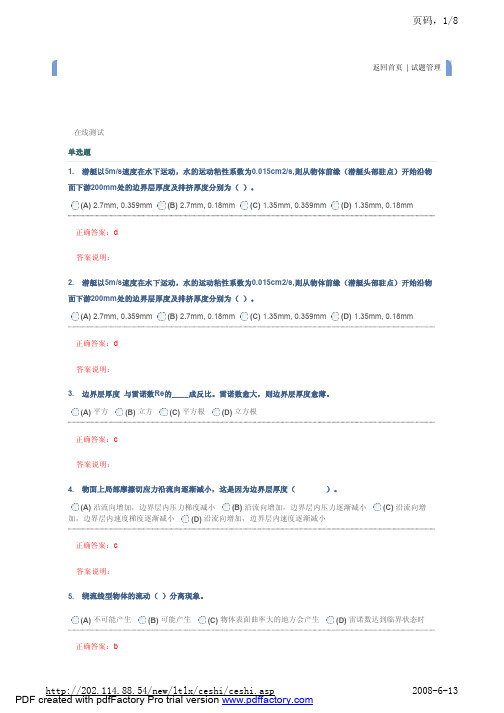
武汉理工大学在线测试11-1
http://202.114.88.54/new/ltlx/ceshi/ceshi.asp PDF created with pdfFactory Pro trial version
2008-6-13
页码,4/8
答案说明:
16. .对于平板边界层内的流动, 壁面上局部切应力沿流动方向( )。 (A) 增加 (B) 减小 (C) 不变 (D) 取决于雷诺数的大小
(C) 沿流向增
http://202.114.88.54/new/ltlx/ceshi/ceshi.asp PDF created with pdfFactory Pro trial version
2008-6-13
页码,6/8
正确答案:c
答案说明:
28. “阻力危机”产生的原因是(
正确答案:b
答案说明:
17. 长为3.5m宽2m薄平板在水中以0.01m/s的速度沿平板自身平面逆水运动,水流以0.01m/s的速度平行平 板运动, 水的运动粘性系数为0.015cm2/s,密度为1000kg/m3,则平板单面所受总阻力为().
(A) 0.01892N (B) 0.02839N (C) 0.00946N (D) 0.03785N
2008-6-13
页码,5/8
答案说明:
22. 在边界层内( )与( )量级相同 (A) 惯性力,表面张力 (B) 惯性力,重力
(C) 惯性力, 弹性力
(D) 惯性力, 粘性力
正确答案:d
答案说明:
23. “阻力危机”产生的原因是(
)。
(A) 边界层分离 (B) 转捩点前移导致分离点后移
线型体
(C) 边界层分离点提前 (D) 物体不是良流
计算机仿真
计算机仿真 在研究系统过程中,根据相似原理,利用计算机来 逼真模仿研究对象。研究对象可以是真实的系统, 也可以是设想中的系统。 计算机仿真是将研究对象进行数学描述,建模编程, 且在计算机中运行实现.它不怕破坏、易修改、可 重用。 计算机仿真可以用于研制产品或设计系统的全过程 中,包括方案论证、技术指标确定、设计分析、生 产制造、试验测试、维护训练、故障处理等各个阶 段。 仿真算法 仿真算法是将系统模型转换成仿真模型 的一类算法,在数字仿真模型中起核心和关键作用。
1 )系统分析 )系统分析 实体1 实体1:自行车 属性:保管费,缺货费,库存量,需求量 活动:进货,销售 实体2 实体2:订单 属性:从发出订货单到收到货物间隔, 属性:从发出订货单到收到货物间隔,订货费 活动:发出订单,收到订货 这是一个随机离散系统的仿真问题。
②分析系统的状态更新规则 系统的状态用 VT, ST,SR 表示 VT, ST, 当前时刻t 当前时刻t 水的体积 VT 水的含盐量 ST 水的含盐率 SR 下一时刻 t + △t 水的体积: 水的体积: VT + 6 △t 水的含盐量: 水的含盐量: ST + 3 - 4× SR × △t 水的含盐率 :水的含盐量/水的体积 水的含盐量/
结束
3) 运行与改进 在这个问题中,系统的状态随时间连续变化, 系统离散化后,仿真结果与离散化的时间间隔 即仿真时钟步长有关,显然步长越小,结果越 精确。但步长越小,计算量越大。 本例中可取 △t = 5 min △t = 1 min △t = 0.1 min 等进行计算,并与解析结果比较。
4) 设计格式,输出仿真结果 △t = 1 min的结果 min的结果
1.3 仿真 物理仿真:在没有计算机以前,仿真都是利用实物 物理仿真 或者它的模型来进行研究的,又称物理仿真。 优点:直接、形象、易信. 缺点:模型受限、易破坏、难以重用。 数学仿真:对实际系统进行抽象,并将其特性用数 数学仿真: 学关系加以描述而得到系统的数学模型,对数学模 型进行实验的过程称为数学仿真。 优点:方便、灵活、经济 缺点:受限于系统建模技术,即系统数学模型不易 建立。 计算机技术的发展为数学仿真创造了环境。
计算机仿真技术试题含完整答案
一、数值计算,编程完成以下各题(共20分,每小题5分) 1、脉冲宽度为d ,周期为T 的矩形脉冲的傅里叶级数如下式描述:)2cos(/)/sin(21[)(1τπππτn T d n T d n T d f n ∑∞=+=当150=n ,41=T d ,2/12/1<<-τ,绘制出函数)(τf 的图形。
解: syms n t;f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y)2、画出函数5505.025.55.15.1cos 5)5(sin )(2x x x x ex x f x +++-=在区间[3,5]的图形,求出该函数在区间[3, 5]中的最小值点m in x 和函数的最小值m in f .解:程序如下 x=3:0.05:5;y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y);plot(xmin,min(y),'go','linewidth',5);str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Xlabel('x')Ylabel('f(x)')经过运行后得到的图像截图如下:运行后的最小值点m in x =4.6,m in f = -8337.86253、画出函数xe x xf x 5.2cos )(3.02-⋅=-在[1,3]区间的图形,并用编程求解该非线性方程0)(=x f 的一个根,设初始点为20=x .解: x=1:0.02:3; x0=2;y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)')X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0)运行后求得该方程的一个根为z=0.3256。
计算机仿真大作业
武汉理工大学(《计算机仿真技术》课程大作业)风力发电系统中增速器的三维建模与仿真试验研究学院(系):物流工程学院专业班级:机械制造研1110班学生姓名:原志磊指导教师:杨艳芳目录摘要 (1)ABSTRACT (2)1 增速器的三维建模与虚拟装配 (3)1.1 零件的三维设计 (3)1.2 虚拟装配 (6)1.2.1 虚拟装配的概论 (6)1.2.2 虚拟装配定义及特点 (7)1.2.3 装配信息及装配关系 (7)1.2.4 基于物理属性的虚拟装配 (9)2 增速器的静力学分析 (17)2.1 静力学分析简介 (17)2.2 接触分析理论 (19)2.3第一级行星轮系静力学分析 (21)2.3.1 建立有限元模型 (22)2.3.2 建立接触对 (23)2.3.3 施加有限元模型的约束和载荷 (24)2.3.4 选择分析类型并设置分析选项 (26)2.3.5 求解 (26)2.3.6 查看分析结果接触分析的结果 (27)3 总结与展望 (30)3.1 工作总结 (30)3.2 工作展望 (30)参考文献 (32)摘要本文首先借助SolidWorks三维建模软件对1500KW风力发电机增速器进行了三维建模并完成虚拟装配,随后借助有限元分析软件ANSYS对增速器的重要零部件进行特性分析。
通过分析结果与理论计算值进行比较,所得结果对于改进设计方法,实现提高增速器各项性能具有重要的指导意义。
论文主要研究了增速器的第一级行星轮系,通过将建立的模型导入有限元分析软件ANSYS中,计算应力。
研究结果表明:在ANSYS中计算出的最大应力值小于理论计算的最大应力值,计算结果满足材料的许用接触应力要求。
本文的特色在于:利用现有的软件对增速器的工作进行了模拟和分析。
对接触分析进行深入研究。
关键词:风力发电机;增速器;建模;虚拟装配;ANSYSAbstractThis paper first completes modeling and virtual assembly of 1500KW wind generator speeder by using SolidWorks, a three-dimensional modeling software.Then analysis the important components of the speeder by ANSYS,a finite element analysis software . The analysis results compares to the theoretical calculated. It is important to improve the design method ,and it has an important significance to achieve to improve the performance of speeder.This paper mainly studies the first grade planetary gear system. The model will be imported in ANSYS to calculate the stress and get the natural frequencies and mode shapes by modal analysis.The results show that the maximum stress calculated in ANSYS is less than the maximum stress calculated in theoretical,so it satisfies the material requirements of the contact stress allowable.In this paper the feature is that the working of speeder was simulated and analyzed by using the existing softwares. It’s in-depth study of the contact analysis.Key Words:wind generator;speeder;modeling;virtual assembly;ANSYS1 增速器的三维建模与虚拟装配1.1 零件的三维设计随着信息技术在各个领域的迅速渗透,CAD/CAM/CAE技术已经得到了广泛的应用,从根本上改变了传统的设计、生产、组织模式,对推动现有企业的技术改造、带动整个产业结构的变革、发展新兴技术、促进经济增长都具有十分重要的意义。
《自动控制系统计算机仿真》习题参考答案

《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0y y +=&, (0)0.8y =解:输入以下语句 绘制的曲线图2-4用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
《计算机仿真技术和CAD》习题答案解析

第0章绪论0-1 什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论、相似理论、信息处理技术和计算机技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识、统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
0-2 仿真的分类有几种?为什么?答:依据相似原理来分:物理仿真、数学仿真和混合仿真。
物理仿真:就是应用几何相似原理,制作一个与实际系统相似但几何尺寸较小或较大的物理模型(例如飞机模型放在气流场相似的风洞中)进行实验研究。
数学仿真:就是应用数学相似原理,构成数学模型在计算机上进行研究。
它由软硬件仿真环境、动画、图形显示、输出打印设备等组成。
混合仿真又称数学物理仿真,它是为了提高仿真的可信度或者针对一些难以建模的实体,在系统研究中往往把数学仿真、物理仿真和实体结合起来组成一个复杂的仿真系统,这种在仿真环节中有部分实物介入的混合仿真也称为半实物仿真或者半物理仿真。
0-3 比较物理仿真和数学仿真的优缺点。
答:在仿真研究中,数学仿真只要有一台数学仿真设备(如计算机等),就可以对不同的控制系统进行仿真实验和研究,而且,进行一次仿真实验研究的准备工作也比较简单,主要是受控系统的建模、控制方式的确立和计算机编程。
数学仿真实验所需的时间比物理仿真大大缩短,实验数据的处理也比物理仿真简单的多。
与数学仿真相比,物理仿真总是有实物介入,效果直观逼真,精度高,可信度高,具有实时性与在线性的特点;但其需要进行大量的设备制造、安装、接线及调试工作,结构复杂,造价较高,耗时过长,灵活性差,改变参数困难,模型难以重用,通用性不强。
0-4 简述计算机仿真的过程。
答:第一步:根据仿真目的确定仿真方案根据仿真目的确定相应的仿真结构和方法,规定仿真的边界条件与约束条件。
第二步:建立系统的数学模型对于简单的系统,可以通过某些基本定律来建立数学模型。
实验力学_武汉理工大学中国大学mooc课后章节答案期末考试题库2023年
实验力学_武汉理工大学中国大学mooc课后章节答案期末考试题库2023年1.下述哪种方法可以比较方便的应用于实际工程实验答案:光弹性贴片法2.关于应变计的灵敏系数以下叙述正确的是答案:灵敏系数通常不能通过理论计算得到,而需要实验标定3.下述哪种方法可以测得模型内部应力答案:三向光弹4.频率一定的动态应变电测时,影响测量精度的主要因素是答案:应变计的栅长5.光弹性法主要利用了下列哪种光学效应答案:暂时双折射6.产生偶然误差的主要原因有答案:A视差_C 干扰_B客观条件的涨落变化7.获得平面光弹性确定内部应力时所需的补充方程的方法有答案:求主应力和法_斜射法_切应力差法8.如下图所示的拉弯组合构件上布置了两个应变计,实测应变为0.001,则构件的弯曲应变为(保留一位有效数值)【图片】答案:0.00059.电阻应变计的基本原理是材料的热胀冷缩效应。
答案:错误10.一般电阻应变计的结构包括答案:盖片_基底_引线_敏感栅11.测混凝土表面应变时,所需应变计尺寸一般为最小颗粒直径的多少倍?答案:512.进行温度补偿的常用方法包括答案:补偿块补偿法13.应变计沿下面哪个方向粘贴时的测量误差最小答案:沿主应力方向14.电阻应变计与应变仪的灵敏系数相同,导线电阻为2Ω,应变计电阻为120Ω,已知测点应变为0.001,试确定采用三线接法时应变仪的读数应变。
(保留三位有效数字)答案:0.000983##%_YZPRLFH_%##0.00098415.如下图所示的轴向拉伸构件上布置了两个应变计,材料的泊松比为0.3,实测应变为0.001,则构件的拉伸应变为(保留三位有效数值)【图片】答案:0.00076916.由于温度变化而引起的应变输出称为热滞后。
答案:错误17.以下哪些是系统误差的特点答案:C 误差是可以测定的_A 误差可以估计其大小18.电阻应变计的灵敏系数通常小于金属丝的灵敏系数。
答案:正确19.速度v、长度l、重力加速度g的无量纲集合是( )。
《计算机仿真技术》试卷A(含答案)
《计算机仿真技术》考试试卷(A卷)班级姓名学号一.填空题。
(每空1分,共20分)1、计算机仿真中系统由_________________、_________________、________________等三个要素组成。
2、常见的系统实验建模法有________________、________________、________________、________________等几种方法。
3、叙述simulink中常见的可变步长的仿真算法有:________________、________________、________________、________________。
(任举四种)4、MA TALB的Comand windows窗口中可以显示workspace中的全部变量的命令是_________________、_________________。
5、计算机仿真算法的算法引起的误差是________________、________________。
6、三维立体绘图中,________________ 是三维曲线绘图命令,________________是三维网格线绘图命令,________________着色表面图绘图命令。
7、符号运算中,泰勒级数计算的函数是________________傅里叶变换的函数________________二.简答题。
(本题5小题,每题8分,共40分)1、计算机仿真的目的和作用2、列举几种计算机仿真软件,并简要介绍一下(要求4种以上)3、matlab主界面主要包括那些窗口,分别有什么样的功能4、局部变量和全局变量之间的区别5、计算机仿真技术中相似性主要包含那几个方面三.编程题 (本题6小题、共40分)根据下面要求,写出程序代码。
1、(5分)设(2E -C -1B)A T =C -1,其中E 是4阶单位矩阵,A T 是4阶矩阵A 的转置。
求矩阵A2、(5分)输入下面的矩阵,求出特征多项式和特征根,并求出特征多项式的微分。
模拟试卷武汉理工大学网络教学平台

8.检波并经隔直电容后的信号成份有
得分
二、填空题(共10分,每小题2分,少填、错填均无分) 、 、 等三种。 、
1.功率放大电路根据静态工作点的位置可分为
2.为实现电信号的有效传输,无线电通信通常要进行调制。常用的模拟调制方式可以分为 和 三种。 。 和 。 ,
3.使调谐放大器工作不稳定的主要因素是 提高调谐放大器稳定性的措施通常采用
2) 信号不调制进行传播会相互干扰,无法接收。
2.答:由下图谐振功率放大器的集电极调制特性知: Ubm、Ucm 及 UBB 不变,而当 UCC 改变时,只有工作在过压工作状态,Ic1 有 明显的变化
四、简析题
解:1. 1 端和有标记端为同名端 2.
fo
1 2 LC
带入数据得, fo=15.9MHz
七、计算题
(1)a)图为 AM 波 b)图为 DSB 波 uAM=2(1+0.3COS2π×102t) COS2πt×106t(V) uDSB=0.6 COS2π×102t COS2πt×106t (V) (2)PC=2w PDSB=0.09w PAM =2.09W BW=200 HZ
八、计算题
10
uC(t)=UCmcosωCt uΩ (t)= UΩ mcosΩt
…………
uo(t)=A uC(t)
试 卷 装 订 线
………………
装 订 线 内 不 要 答 题 , 不 要 填 写 考 生 信 息
………………
试 卷 装 订 线
…………
4
得分
六、画图题(共 10 分)
分析下图为利用 MC1596 构成的何种电路?并画出这种电路的实现模型。 MC1596 还能用在哪些场合?
得分
计算机仿真技术与cad第三版课后练习题含答案
计算机仿真技术与CAD第三版课后练习题含答案前言计算机仿真技术与CAD第三版是近年来广受欢迎的CAD教材。
本书涵盖了CAD 的基础知识、CAD的应用、计算机仿真技术等内容,适合CAD初学者和高级用户使用。
本文主要介绍本书的课后练习题及答案,希望对大家有所帮助。
第一章课后练习题及答案1.1 选择题1.以下哪项不是CAD应用的领域?A. 工程学B. 数学C. 植物学D. 医学答案:C2.CAD是什么的缩写?A. Computer-ded Design(计算机辅助设计)B. Computer-ded Distance(计算机辅助距离)C. Capsule-med Destruction(胶囊定向破坏)D. Capability-Assisted Driving(能力协助驾驶)答案:A1.2 填空题1.CAD软件主要分为三种类型,分别是2D __________ 、3D__________ 、仿真软件。
答案:制图软件、制造软件2.AutoCAD是一款 __________ 系统。
答案:二维制图3.CAD软件通常可以完成______________ 、___________ 、____________ 等操作。
答案:制图、设计、分析1.3 综合应用题设计一件简单的图形,包括设备名称、设备布局图、视图图和详细图。
并在AutoCAD中实现。
答:见图。
简单图形简单图形图中的简单图形包括了设备名称、设备布局图、视图图和详细图。
其中,设备名称为“简单图形”,设备布局图包含了该设备的位置、大小和方向信息,视图图包含了设备的3D视角,详细图则针对设备内部的结构进行了细节描绘。
使用AutoCAD可以方便地实现这件图形的设计和制图。
第二章课后练习题及答案……第三章课后练习题及答案……第四章课后练习题及答案……结语以上是《计算机仿真技术与CAD第三版》的部分课后练习题及答案,希望对大家有所帮助。
本书内容丰富、简明易懂,是一本非常优秀的CAD教材。
武汉理工大学虚拟仿真系统实验期末复习题

虚拟仿真系统实验复习题复制题目后,按住CtrI+F键查找相应题目答案(超越高度)一、多选(共计25分,每题2.5分,每题答案完全一样得满分,少选、多选、错选均不得分。
)1、以下是车削工艺特点的是()A.易于保证工件各加工面的位置精度B.切削过程较平稳避免了惯性力与冲击力,允许采用较大的切削用量,高速切削,利于生产率提高。
C.适于有色金属零件的精加工D.刀具简单正确答案:【A;B;C;D】2、CAD/CAM的系统软件可分为哪几个层次()A.系统软件B.支撑软件C.支撑软件D.辅助软件正确答案:【A;B;C】3、曲面的构建方法有()。
A.举升曲面B.昆氏曲面C.扫描曲面D.直纹曲面正确答案:【A;B;C;D】4、计算机仿真包括:(ABC)A.数理建模B.仿真建模C.仿真实验D.生产代码正确答案:【A;B;C】5、目前,CAD/CAM技术正继续向()方向发展。
A.集成化B.网络化C.智能化D.虚拟化正确答案:【A;B;C;D】6、SoIidWorks的特点是()。
A.易学易用B.功能强大C.优化设计D.技术创新正确答案:【A;B;D】7、SoIidWorks的功能有()。
A.三维图形导出二维工程图B.装配设计C.简单的有限元分析D.CAM正确答案:【A;B;C;D】8、派生式CAPP的特点是()A.使用CAPP专家系统自动生成工艺B.在工艺文件库中查询已有工艺路线并作修改C.通过GT代码重新生成工艺路线D.通过决策逻辑产生工艺路线正确答案:【B;C】9、典型CAD系统的硬件主要组成部分包括()oA.主机B.实时I/O装置C.I/O装置C装置E.外存贮器10、斯沃加工测量的功能包括()A.特征点B.特征线C.距离测量D.粗糙度分布正确答案:【A;B;C;D】二、判断(共计25分,每题2.5分)11、使用G28X100Y120时,X、Y的坐标值为目标点。
()A.正确B.正确正确答案:【B】12、CAD系统仅用于绘制工程图纸,其主要内容为计算机图形学。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五、(10分)已知系统的传递函数为6
168682)(232+++++=s s s s s s G 。
语言建立系统传递函数模型,并求:
⑴ 该系统的单位阶跃响应;(2分)
⑵ 输入函数为u(t)时的响应;(3分)
(u(t)正弦信号,周期2秒,仿真时间8秒,采样周期0.1);
(3) 输入函数为u(t)时的响应;(3分)
(u(t)方波输入信号,周期10秒,仿真时间20秒,采样周期0.05)
(4) 绘出系统的波德图(Bode )。
(2分)
解答:
num=[2 8 6];
den=[1 8 16 6];
sys=tf(num,den);
t=0:0.1:8;
y1=step(sys,t);
u=sin(t*pi);
y2=lsim(sys,u,t);
subplot(2,2,1);plot(t,y1);
grid;
title('阶跃响应曲线');
xlabel('响应时间');
ylabel('响应值');
hold on;
subplot(2,2,2);plot(t,y2);
grid on ;
title('对sin(t)的响应曲线');
xlabel('响应时间');
ylabel('响应值');
t=0:0.05:20
u=square(pi/5*t)
y3=lsim(sys,u,t);
subplot(2,2,3);plot(t,y3)
grid on ;
title('对方波信号的响应曲线');
xlabel('响应时间');
ylabel('响应值');
subplot(2,2,4);bode(sys);
grid ;title('bode 图');
运行结果:
六、(10分)设二阶动力学系统的传递函数如下,假设将无阻尼固有频
率固定为ωn =1 rad/s ,将阻尼比的值分别设置成ζ=0,0.1,0.2,0.3,…,
MATLAB 语言编程,分析在这些阻尼比ζ的取值下该系统的阶跃响应。
2222)(n
n n s s s G ωςωω++= 解答:wn=1;
kesi=[0:0.1:1,2,3,4,5];
figure('color',[1 1 1]);
hold on
for i=kesi
num=wn.^2
den=[1,2*i*wn,wn.^2];
step(num,den);
end
title('The Step Response of Two Order system')
运行结果:
七、(20分)对图示的车辆(汽车、摩托车等)悬架系统进行数字仿真。
m 1=40 Kg 、
2、轮胎刚度k 1=158 kN/m 、悬架刚度k 2=
23 kN/m 、b 是悬架减振器阻尼系数,x 是簧下质量的振动位移、
y 是簧上质量的振动位移,u 是路面不平度函数。
研究以u 为输入,
x 、y 为输出时,系统的动态响应。
完成下述任务:
⑴建立系统数学模型,取车身垂直振动速度和位移、车轮垂直振动速度和
位移为四个状态变量,把系统数学模型转换为状态方程形式;(5分)
⑵绘制系统的函数方块图或状态变量图;(5分)
⑶取阻尼系数b 的值分别为600、1000、2000、4000,对系统
作阶跃输入动态仿真并绘制出系统的Bode 图。
(7分)
⑷对仿真结果进行分析,给出分析结论。
(3分)
解答:
取车身垂直振动速度和位移、车轮垂直振动速度和位移为四个状态变量 建立系统状态方程模型
函数方块图如下:
12122()()()()()m x k y x b y x k u x m y k y x b y x =-+-+-=---- 123142x x x y x x x x x y ====== [][]12122341121223421()1x k k x k x bx bx k u m y k x k x bx bx m =-++-++=-+- 1122122111113314422222200100000100x x x x k k k b b u k m m m m x x m x x k k b b m m m m ⎡⎤⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥--⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥--⎢⎥⎣⎦⎣⎦
示波器显示结果:
源程序:
m1=40;
m2=400;
k1=158;
k2=23;
k1=1000*k1;k2=1000*k2;
p(1)=600;
p(2)=1000;
p(3)=2000;
p(4)=4000;
for n=1:4
b=p(n);
sys(n)=ss(A,B,C,D);
A=[0 0 1 0;0 0 0
1;-(k1+k2)/m1,k2/m1,-b/m1,b/m1;k2/m2,-k2/m2,b/m2,-b/m2]; B=[0; 0; k1/m1; 0]
disp('display:matrix A ,B');
disp('matrix A='),disp(A),
disp('matrix B='),disp(B),
ws=sqrt(k2/m2)/m1,disp(ws),
wt=sqrt(k2+k1/m1)/m1,disp(ws),
C=zeros(1,4);C(2)=1;D=0;
end
figure('name','悬架系统的阶跃响应','numbertitle','off'); t=0:0.01:25;
step(sys(1),sys(2),sys(3),sys(4),t);
grid;title('簧上质量位移响应曲线');
xlabel('响应时间');ylabel('响应值');
figure('name','悬架系统的bode图','numbertitle','off'); w=logspace(0.3,3.0);
bode(sys(1),sys(2),sys(3),sys(4),w);
grid;title('簧上质量的bode图');
运行结果:
分析:当wn为不变值时,随着减震器阻尼系数增大,则最大超调量减小,振荡周期增长,即振荡减弱,平稳性好。
另外,随着阻尼比增大,上升时间和峰值时间也增大,使初始响应速度变慢。
本题中b=4000时系统稳定性最好.
课程考查的要求:
(1)课堂完成考查题的1~4题(完成时间:1小时);
(2)课后完成考查题的5~7题,用A4纸打印源程序、SIMULINK模型及分析结果一周内交任课老师,并将源程序、SIMULINK模型交任课老师,任课老师随机抽查,进行面试。