基于MSP430单片机的红外遥控器设计
基于430单片机的红外解码程序

/*红外遥控解码*///将遥控器的码值送至595驱动的数码管显示//P2_0为1838输入//595的驱动没有附上,大家可以自己想办法显示出来#include <msp430f2272.h>#include "hc595.h"#define uchar unsigned char#define uint unsigned int#define c(x) (x*120000/120000)uchartable[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xC6,0xA1, 0x86,0x8E};//共阳数码管uchar table2[]={0x01,0x02,0x04,0x08};uchar Led_Buf[4];//数码显示缓冲区uchar Ir_Buf[4];//储存解码结果uchar Led_index=0;//中断函数内显示之用void delay1(){uint x,y;for(x=100;x>0;x--)for(y=100;y>0;y--);}/*获取低电平时间函数*///////////////////////unsigned int Ir_Get_Low(){uint temp0;TACTL=TASSEL_2+MC_1+ID_3;//时钟来源为SMCLK,8分频,1M,增加模式TACCR0=65500;while(!(P2IN&0X01));//条件是:低电平TACTL&=~MC_3;temp0=TAR;//读取低电平时间TACTL|=TACLR;//TACCR0清零return temp0;}/*获取高电平时间函数*///////////////////////1unsigned int Ir_Get_High(){uint temp1;TACTL=TASSEL_2+MC_1+ID_3;//时钟来源为SMCLK,8分频,1M,增加模式TACCR0=65500;while(P2IN&0X01);//条件是:高电平TACTL&=~MC_3;temp1=TAR;//读取低电平时间TACTL|=TACLR;//TACCR0清零return temp1;}/*系统时钟初始化函数*///////////////////void clock_init(){uchar i;WDTCTL=WDTPW+WDTHOLD;/* BCSCTL1&=~XT2OFF;BCSCTL2|=SELM_2+SELS;//MCLK为8M,SMCLK不分频,8M WDTCTL=WDTPW+WDTHOLD;//关闭看门狗*/BCSCTL1|=XTS;BCSCTL2|=SELM_3+SELS+DIVS_1+DIVM_1;//MCLK为16M,SMCLK8M BCSCTL3|=LFXT1S_2;do{IFG1&=~OFIFG;//清除振荡错误标志for(i=0;i<100;i++)_NOP();}while((IFG1&OFIFG)!=0);IFG1&=~OFIFG;}/*主函数*//////////////////void main(){uchar j,k;uint temp;clock_init(); //时钟初始化hc595_init();//595初始化TBCTL|=TBSSEL_2+MC_1+ID_3+TBCLR;TBCCR0=5000;TBCTL|=TBIE;//P2DIR&=0XFE;//P2_0输入//P2IE|=BIT0;//允许中断//P2IES|=BIT0;//下降沿触发中断_EINT();hc595(0XC0,0x01);while(1){restart:while(P2IN&0X01);temp=Ir_Get_Low();if(temp<c(8000) || temp>c(10000)) continue;//引导脉冲低电平9000temp=Ir_Get_High();if(temp<c(4000) || temp>c(5000)) continue;//引导脉冲高电平4500for(k=0;k<4;k++) //4个字节for(j=0;j<8;j++) //每个字节8位{temp=Ir_Get_Low();if(temp<c(200) || temp>c(800)) goto restart;temp=Ir_Get_High();if(temp<c(200) || temp>c(2000)) goto restart;Ir_Buf[k]>>=1;//高电平时间大于1120us,就认为是1,小于则是0if(temp>c(1120)) Ir_Buf[k]|=0x80;}Led_Buf[0]=Ir_Buf[2]&0xf;//显示结果Led_Buf[1]=(Ir_Buf[2]/16)&0xf;Led_Buf[2]=Ir_Buf[3]&0xf;Led_Buf[3]=(Ir_Buf[3]/16)&0xf;}}3//管脚中断函数#pragma vector=PORT2_VECTOR__interrupt void Port_2(void){P2IFG&=~BIT0;}//定时器A溢出中断函数#pragma vector=TIMERA0_VECTOR__interrupt void Timer_A(void){TACTL&=~TAIFG;}//定时器B溢出中断函数#pragma vector=TIMERB1_VECTOR__interrupt void Timer_B(void){hc595(table[Led_Buf[Led_index]],table2[Led_index]); Led_index++;if(Led_index==4)Led_index=0;TBCTL&=~TBIFG;}。
基于单片机的红外线遥控器设计

毕业设计姓名:专业:班级:指导教师:课程设计任务书姓名:钟思专业:自动化班级:1301班设计课题:基于单片机的红外线遥控器设计指导教师:电子信息工程系印制二○一五年十二月目录第一章红外发射部分 (1)1、设计要求与指标 (1)2、红外遥感发射系统的设计 (1)3、红外发射电路的设计 (2)4、调试结果及其分析 (3)第二章红外接受部分 (4)1、红外遥控系统的设计 (4)2、系统的功能实现方法 (9)3、红外接受电路图 (10)4、软件设计: (10)5、调试结果及分析: (10)6、结论: (11)参考文献 (11)第一章红外发射部分1.设计要求与指标红外遥控是目前使用较多的一种遥控手段。
功能强、成本低等特点。
系统。
设计要求利用红外传输控制指令及智能控制系统,借助微处理器强大灵活的控制功能发出脉冲编码,组成的一个遥控系统。
本设计的主要技术指标如下:(1) 遥控围: 0 — 1 米(2) 显示可控制的通道(3) 灵敏可靠,抗干扰能力强(4) 控制用电器电流最高为 2 A红外遥控的特点是不影响周边环境的、不干扰其他电器设备。
由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;多路遥控。
红外遥控系统由发射和接收两大部分组成,系统采用编 / 解码专用集成电路和单片机芯片来进行控制操作。
设计的电路由几个基本模块组成:直流稳压电源,红外发射电路,红外接收电路及控制部分。
发射电路,利用遥控发射利用键盘,这种代码指令信号调制在 40KH z 的载波上,激励红外光二极管产生具有脉冲串的红外波,通过空间的传送到受控机的遥控接收器。
2.红外遥感发射系统的设计红外遥控系统由发射和接收两大部分组成,系统采用编/解码专用集成电路和单片机芯片来进行控制操作。
发射系统设计的电路由如下的几个基本模块组成:直流稳压电源,红外发射电路。
系统框图如图所示。
3.红外发射电路的设计3.1.摇控码的编码格式采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms 的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms 的组合二进制的“1”。
基于MSP430单片机的红外通讯的实现方法-自动化本科生毕业设计.doc
xx理工大学城市学院本科生毕业设计(论文)学院:电子与自动化学院专业:自动化学生: xxx指导教师:王 xxx完成日期:2014年5月30日xxx理工大学城市学院本科生毕业设计(论文)基于MSP430单片机的红外通讯的实现方法总计毕业设计(论文)43 页表格 2 个插图23 幅摘要红外通讯是利用红外技术实现两点间的近距离保密通信及信息转发。
它一般是由红外发射和接收系统两部分组成。
发射系统对一个红外辐射源进行调制后再发射红外信号,而接收系统是用光学装置和红外探测器进行接收,这样就构成红外通讯系统。
红外通讯技术并不需要实体连线,简单易用而且实现成本较低,因此广泛应用于小型移动设备互换数据和电器设备的控制中,例如笔记本电脑、PDA、移动电话之间或与电脑之间进行数据互换(个人网),电视机、空调的遥控器等。
本文设计了以MSP430单片机为控制核心的红外通讯系统。
在介绍了MSP430单片机的特性、红外发射器、红外接收器的基础上,给出了系统的总体设计方案,并完成了系统的软硬件设计。
在这个控制系统中,第一块MSP430G2553单片机先把准备发送的数据放到UART的寄存器(发送缓冲区)中,然后控制红外发射二极管将数据发送给与第二块MSP430G2553单片机I/O口相连接的红外接收头HS0038,所以当第二块单片机接收到数据的时候就会控制LCD12864将接收到的数据显示出来。
当第二块单片机接收完数据后,还会将接收完毕的信号通过红外发射二极管发送给与第一块单片机I/O接口相连接的红外接收头HS0038,当第一块单片机接收到信号后,控制另一块LCD12864将数据显示出来,如此便实现简单的红外通讯。
最后详细介绍了硬件部分和软件部分的实现方法,并进行软硬件联合调试,初步达到了设计的预期目的。
关键词:MSP430单片机;红外发射;红外接收AbstractInfrared communication is the use of infrared technology to achieve a close secret communication and information between the two forwards.It generally consists of two parts, consisting of an infrared transmitting and receiving system.After a transmitting system for transmitting infrared radiation is modulated infrared signal, and an optical apparatus and a receiving system for receiving an infrared detector, an infrared communication system constituted.Infrared communication technology does not require a physical connection, easy to use and achieve lower costs, which are widely used in the control of small mobile devices swap data and electrical equipment, such as computers or between and among laptops, PDA, mobile phone data interchange (personal area network), TV, air conditioning, remote control, etc.This article is designed to MSP430 microcontroller core infrared communication system.On the basis of the introduction of the MSP430 MCU features an infrared transmitter, infrared receiver, giving the overall design scheme of the system and completed a system of hardware and software design.In this control system,the first one MSP430G2553 first single-chip UART is ready to send data into the register (transmit buffer).Then control the infrared emitting diode sends the data to give a second MSP430G2553 MCU I / O port IR receiver connected HS0038.So when the second block of data is received when the microcontroller will control LCD12864 will receive the data displayed.When finished second microcontroller receives data.Also will receive the complete signal sent by infrared emitting diodes give the first piece of microcontroller I/O interface infrared receiver connected HS0038.When the first piece of the microcontroller receives signals to control another piece of data to be displayed LCD12864.So it simple infraredcommunication.Finally, a detailed description of the implementation of the hardware and software components.And joint commissioning of hardware and software, initially designed to achieve the desired purpose.Keywords: MSP430 microcontroller; infrared emission; infrared receiver目录摘要 (I)Abstract (II)第1章绪论 (1)1.1红外通讯技术的概念 (1)1.2红外通讯技术的特点 (1)1.3红外通讯技术的应用及发展 (2)1.4课题研究的主要内容 (4)1.4.1研究内容 (4)1.4.2论文安排 (4)第2章控制系统方案设计 (5)2.1控制系统实现目标设计 (5)2.2控制系统总体方案设计 (5)2.2.1系统控制器的选择 (5)2.2.2红外发射头和接收头的介绍及选择 (11)2.2.3系统的总体设计 (13)2.3控制系统设计关键 (15)第3章控制系统硬件电路设计 (16)3.1控制系统硬件电路 (16)3.2 MSP430G2553单片机及其最小系统 (17)3.3红外一体化接收头HS0038 (18)3.4 红外通讯系统电路设计 (20)3.5 LCD液晶显示电路 (22)第4章控制系统软件设计 (24)4.1系统软件编程语言选择 (24)4.2编程软件的选择 (25)4.3系统软件设计 (25)4.3.1主程序的功能设计及实现 (25)4.3.2接收编码程序原理 (27)第5章控制系统软硬件调试 (33)5.1系统硬件电路调试 (33)5.1.1硬件电路焊接方法的选择及元器件布局 (33)5.1.2硬件电路焊接技巧及走线方式 (34)5.1.3硬件电路焊接注意事项 (35)5.2系统软件编译 (36)5.2.1系统软件编译环境的介绍 (36)5.2.2创建工程 (37)总结 (41)致谢 (42)参考文献 (43)第1章绪论本章简要介绍红外通讯技术的概念、红外通讯技术的特点、红外通讯技术的应用及发展,以及本次研究的主要内容和论文安排。
基于msp430g2553的红外遥控小车解码控制程序
基于msp430g2553的红外遥控小车解码控制程序//遥控小车最终程序#include#define CPU_F ((double)12000000)//数字控制震荡器1MHZ#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/12000000.0))//延时X微秒#define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/12000.0))//延时X毫秒char const redled[8]={0x07,0x00,0x01,0x02,0x03,0x04,0x05,0x06};//led测试版对应的八个灯unsigned char receive[2]={0x00,0x00};//数据码,数据反码unsigned char j=0,k=0,f=0,led=0;//中断次数,receive的元素,,找到按键地址数组的第f个元素int flag=1;//***************************主程序********************//void main(void){WDTCTL=WDTPW+WDTHOLD; //关闭看门狗BCSCTL1=CALBC1_1MHZ; //这两句的作用,基本时钟系统控制,数控震荡控制,将时钟校准1MHZDCOCTL=CALDCO_1MHZ;P1DIR|=BIT0+BIT6+BIT2+BIT3+BIT4;//P1端口的P1.0、P1.6设置为输出方向P2DIR|=0x0f; //P2的0,1,2,3设置为输出口P1OUT|=BIT0+BIT6; //P1.0、P1.6输出高电平,次单片机的VCC为3.56VP1IE|=0X02; //P1.1中断使能P1IES|=BIT1; //P1.1中断边沿选择,下降沿触发P1IFG=0; //清P1.1中断标志_BIS_SR(GIE); //开总中断while(1) //{if(receive[0]==0xa2){flag=1;}if(receive[0]==0xe2){flag=-1;}if(flag==1) //正转P1.0{P1OUT&=~BIT3;P1OUT&=~BIT4;switch(receive[0]){case 0x68:{P1OUT&=~BIT0;P1OUT&=~BIT2;break;} //0键case0x30:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(1);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(9);}break;}//1键case0x18:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(2);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(8);}break;}//2键case0x7a:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(3);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(7);}break;}//3键case0x10:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(4);P1OUT&=~BIT0;P1OUT&=~BIT2;delay_m s(6);}break;}//4键case0x38:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(5);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(5);}break;}//5键case0x5a:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(6);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(4);}break;}//6键case0x42:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(7);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(3);}break;}//7键case0x4a:{{P1OUT|=BIT0;P1OUT|=BIT2;delay_ms(8);P1OUT&=~B IT0;P1OUT&=~BIT2;delay_m s(2);}break;}//8键case 0x52:{P1OUT|=BIT0;P1OUT|=BIT2;break;} //9键}}else if(flag==-1) //反转P1.2{P1OUT&=~BIT0;P1OUT&=~BIT2;switch(receive[0]){case 0x68:{P1OUT&=~BIT3;P1OUT&=~BIT4;break;} //0键case0x30:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(1);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(9);}break;}//1键case0x18:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(2);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(8);}break;}//2键case0x7a:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(3);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(7);}break;}//3键case0x10:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(4);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(6);}break;}//4键case0x38:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(5);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(5);}break;}//5键case0x5a:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(6);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(4);}break;}//6键case0x42:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(7);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(3);}break;}//7键case0x4a:{{P1OUT|=BIT3;P1OUT|=BIT4;delay_ms(8);P1OUT&=~B IT3;P1OUT&=~BIT4;delay_m s(2);}break;}//8键case 0x52:{P1OUT|=BIT3;P1OUT|=BIT4;break;} //9键}}}}//*********************红外遥控器中断程序*******************//#pragma vector=PORT1_VECTOR //中断程序的格式:#pragma vector=中断矢量__interrupt void port1(void)//格式:__interrupt void 函数名(void){P1IFG=0X00; //清P1中断标志int count=0; //高电平持续时间计数值while(!(P1IN&BIT1)); //等电平变为高电平while(P1IN&BIT1) //计算高电平持续时间{count++;if(count>8000)return;//如果高电平持续时间过长则推出中断程序}if(j>16) //一体化红外接收头一接收遥控器信号,就会输出32位的脉冲序列波,其中后16位{ //决定遥控器的按键地址,16位由8位数据码和数据反码组成,我们需要将其解码//time[j-17]=count; //将记得的高电平持续时间放入时间数组中if(j==25)k++; //到数据反码的起始位的时候,我让receive数组元素下标+1receive[k]<<=1; //接收数据码左移一位,比如:xxxx xxxx 左移一位后xxxx xxx0if(count>80)receive[k]|=0x01;//高电平持续时间超过80,则将左移一位后的最低位变1,} //结果变为,xxxx xxx1,如果没超过80则保持不变,xxxx xxx0 j++;if(j>32){j=0;k=0; //解码结束,j,k值清零delay_ms(150);}}。
基于单片机的红外线遥控器设计

毕业设计姓名:专业:班级:指导教师:课程设计任务书姓名:钟思专业:自动化班级: 1301班设计课题:基于单片机的红外线遥控器设计指导教师:电子信息工程系印制二○一五年十二月目录第一章红外发射部分 (1)1、设计要求与指标 (1)2、红外遥感发射系统的设计 (1)3、红外发射电路的设计 (2)4、调试结果及其分析 (3)第二章红外接受部分 (4)1、红外遥控系统的设计 (4)2、系统的功能实现方法 (9)3、红外接受电路图 (10)4、软件设计: (10)5、调试结果及分析: (10)6、结论: (11)参考文献 (11)第一章红外发射部分1.设计要求与指标红外遥控是目前使用较多的一种遥控手段。
功能强、成本低等特点。
系统。
设计要求利用红外传输控制指令及智能控制系统,借助微处理器强大灵活的控制功能发出脉冲编码,组成的一个遥控系统。
本设计的主要技术指标如下:(1) 遥控围: 0 — 1 米(2) 显示可控制的通道(3) 灵敏可靠,抗干扰能力强(4) 控制用电器电流最高为 2 A红外遥控的特点是不影响周边环境的、不干扰其他电器设备。
由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;多路遥控。
红外遥控系统由发射和接收两大部分组成,系统采用编 / 解码专用集成电路和单片机芯片来进行控制操作。
设计的电路由几个基本模块组成:直流稳压电源,红外发射电路,红外接收电路及控制部分。
发射电路,利用遥控发射利用键盘,这种代码指令信号调制在 40KH z 的载波上,激励红外光二极管产生具有脉冲串的红外波,通过空间的传送到受控机的遥控接收器。
2.红外遥感发射系统的设计红外遥控系统由发射和接收两大部分组成,系统采用编/解码专用集成电路和单片机芯片来进行控制操作。
发射系统设计的电路由如下的几个基本模块组成:直流稳压电源,红外发射电路。
系统框图如图所示。
3.红外发射电路的设计3.1.摇控码的编码格式采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms 的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms 的组合二进制的“1”。
基于MSP430红外遥控小车的设计与开发(开发文档,源代码,电路图)

方案二:采用 L298N 芯片驱动电机,只需通过单片机产生 PWM 波即可驱动电 机,而且可以同时驱动两个直流电机同时工作,最大输入电压可达 50V,驱动能 力较大。并且可以通过四个输入端口对电机的正反转进行控制,符合遥控小车的 要求,选用方案二。
3.5 显示模块方案选择:
2.6.3 外形尺寸图:
2.7 基本方案论证:
本设计以单片机 MSP430F149 为控制核心,电路主要分为红外发送电路和 红外接收控制电路,红外发送电路包括方向按键电路和红外管发射电路;接收及 控制电路包括红外接收电路,lcd 显示电路,电机驱动电路和计程模块。PC838 一体化红外接收头接收遥控器发射的红外型号,并传送给单片机,单片机根据已 定的协议对车体运行进行控制,并通过计程模块对小车行使的路程进行实时的采 集,通过 LCD 显示。
3.6 计程模块方案选择:
方案一:采用 ST151 计程,ST151 由发光管和光敏元件构成,发光管发 光可导通光敏元件,输出端口输出高电平。在发光管和光敏元件间加一挡板,阻 止光敏元件导通,输出端输出低电平。可以在车轮侧面加挡板,通过 ST151 进
行测距离。 方案二:采用 ON2171 计程,ON2171 原理与 ST151 相同,但其体积小,
3.7.3 红外接收模块 红外接收模块采用一体化红外接收头 PC838,用 3.3V 供电,在电源和地
之间加 104 的滤波电容,消除电源波纹对接受效果的影响。其输出引脚直接接 单片机的 P13 口。电路图如下:
3.7.4 LCD 显示模块 LCD 显示模块用来显示小车的运行状态和行程,Nokia5110lcd 显示屏体
考虑到遥控小车在实际运行中要的灵活性和快速性的要求,最终选择方案二。
基于MSP430的红外光源控制系统及其硬件设计

基于MSP430的红外光源控制系统及其硬件设计摘要随着集成电路技术、微控制器技术、光谱技术高速发展,基于红外光光谱特性的应用越来越广泛。
红外光源被广泛应用于气体分析、激光测距、机器人定位、遥感、非接触式测温等诸多领域中。
然而由于红外光源通常功率较大,导致制约相关红外光源应用技术的发展。
随着近年来集成电路技术飞跃式的发展,微控制器、大功率场效应管等电子元器件性能得到大幅度提高,使得利用微控制器控制红外光源成为一种主流趋势。
本设计通过利用MSP430单片机以及稳压电压实现红外光源的电压控制以及利用微控制器技术控制场效应管的通断实现红外光源的电子调制。
关键词:红外光源;调制;电压控制;MSP430;MSP430-based infrared light source control system and its hardwaredesignAbstractWith the rapid development of integrated circuit technology, microcontroller technology, and spectroscopy technology, applications based on the spectral characteristics of infrared light are becoming more and more extensive. Infrared light sources are widely used in gas analysis, laser ranging, robot positioning, remote sensing, non-contact temperature measurement and many other fields. However, due to the relatively high power of infrared light sources, the development of related infrared light source application technologies is restricted. With the rapid development of integrated circuit technology in recent years, the performance of electronic components such as microcontrollers and high-power field effect transistors has been greatly improved, making the use of microcontrollers to control infrared light sources a mainstream trend. This design uses the MSP430 MCU and the stabilized voltage to realize the voltage control of the infrared light source and the microcontroller technology to control the on and off of the field effect tube to realize the electronic modulation of the infrared light source.Keywords: Infrared light source; modulation; voltage control; MSP430;目录1前言 (2)1.1本设计的目的及意义 (2)1.2本设计在国内外的发展概况及存在问题 (3)1.3本设计应解决的主要问题 (3)2本设计 (4)2.1系统方案 (4)2.2 硬件设计软件原理 (5)2.3电源电路原理与设计 (6)2.3.1单片机稳压电路设计 (6)2.3.2数控可调电压电路设计 (8)2.3.3数字电位器电路设计 (10)2.4单片机电路原理与设计 (11)2.5 按键电路原理与设计 (13)2.6 串口电路原理与设计 (13)参考文献 (14)谢辞 ...................................................... 错误!未定义书签。
基于MSP430f2111的工业红外遥控装置设计

2019年第8期【摘要】随着现代工业的迅猛发展,很多设备已经不能单单依靠就地操作的方式进行操作了,而红外遥控技术虽然广泛应用于日常生活,但在工业设备中使用的情况却比较少见。
考虑到工业环境的多方面使用需求,本设计使用了以MSP430单片机为核心的控制系统,基于NEC 通讯协议和PWM 波的调制完成了红外遥控装置的设计,并使用Protues 进行仿真实验验证了方案的可行性。
设计方案成本较低且具备优良的低功耗特性和信息传递准确性,可以广泛适用于多种工业环境,也可以完成对多个设备进行遥控的要求,增加了工业环境控制手段的多样性,同时远距离的控制方式也在一定程度上保证了工业现场操作人员的安全性。
【关键词】红外遥控;MSP430;PWM一、引言红外遥控装置由于其结构简单、成本低廉、制作方便、抗干扰能力强等一系列优点,成为目前使用最广泛的一种通信和遥控手段。
[i]在日常生活中,红外遥控的技术已经相当成熟,包括电视遥控器、空调遥控器等的使用。
但由于工业环境复杂,对工业用红外遥控装置就有了比日常生活中所使用的遥控器高得多的要求。
二、红外遥控装置设计本设计在硬件的设计上采用了MSP430f2111单片机作为自制红外遥控装置的信号发生装置,采用HS0038一体化红外接收头作为红外信号接收装置。
MSP430系列单片机拥有卓越的低功耗性能,而MSP430f2111单片机和HS0038一体化红外接收头的成本也很低廉,本设计采用了上述硬件进行硬件设计并在Protues 中搭建硬件仿真电路用来进行仿真实验。
Proteus 是基于SPICE3F5仿真引擎的混合电路仿真软件,不仅能够仿真模拟、数字电路以及模数混合电路,更具特色的是它能够仿真基于单片机的电子系统。
[ii]通过Protues 搭建自制红外遥控装置的硬件电路,然后将程序录入相应单片机进行仿真实验。
由于硬件设计中采用的HS0038一体化红外接收头可以接收的红外信号频率为38KHz ,因此在发送端必须发送38KHz 的红外信号。
以MSP430单片机为核心的红外线通信系统设计分析

图 1 系 统 接 收 部 分
1 系统结构
以 MS P 4 3 0单 片机 为 核 心 的 红 外 通 信 系统 工 作 原 理 , 是 系统 中使 用 的单 片 机 是 由 美 国 T I 公 司 生 产 的 MS P 4 3 0 F 将 单 片 机 设 备 采 集 到 的 温 度 信 号 . 以及 麦 克 风 采 集 到 的 声音 1 2 2 2型 号 , 其 发 出 的 显 示 信 息 会 由 相 应 的 端 口 . 发 送 到 信 号 传 输 到 系统 中 ,利 用 通 用 锁 相 环 电路 音 调 译 码 器 L M 5 6 7 7 4 H C 2 4 5 , 然后 经 过 电平 转 换 , 在 液 晶 显 示 器 中显 示 出来 。 进行调制操作 . 然后 经 由 红 外发 射 管发 出 。 接 收 端在 接 收 到发 3 软 件设计 送 端 发 出的 红 外 信 号 后 . 会 对其进二级放 大处理 . 并 将 处 理后 当发 送 端 的 单 片 机 开始 工 作 时 。 为了减少干扰 . 会 首 先 针 的信 号送如 L M5 6 7中 进 行 解调 操 作 . 经滤 波处理后 。 以 声 音 对 单 片机 内部 的 一 些 功 能 器 件 。 包括 通 信 串 口 、 定 时器等 , 进 或 者 图像 的 方 式 显 示 出来 。
系统 包括 了发 送 和 接 收 两 个 主要 部 分 ,发 送 部 分 主要 硬 件 设 备 有信 号放 大 器、 麦 克 风 、 温度 传 感 器 ( D S 1 8 B 2 0 ) 、 MS P 4 3 0单 片 机 以及 红 外 发 射 二 极 管 等 。接 收 部 分 如 图 l所 示, 主 要 硬 件 设 备 包括 了光敏 三 极 管 、 光 电放 大 器 、 通 用锁 相 行初始化操作 . 之 后 还 会 对 DS1 8 B 2 0温 度 传 感 器 进 行 初 始 化 操作 , 在 初 始 化 完成 后 , 启动 相应的 温度转 换程序 , 然 后 执 行 系统 本 身的 程 序 和 显 示 电路 、 操 控 电路 子 程 序 。 待 温 度 转 换 完 成后 . 其会 对相 应 的 数 据 进 行 读 取 和 格 式 转 换 , 经单片机 串口
基于单片机的红外线遥控器设计
De s i g n o f I n f r ar e d Re mo t e Co n t r o l l e r B a s e d O n MCU
W AN G Ho n g r n e i
( T i a n j i n T i a n b o S c i e n c e&T e c h n o l o g y C o . , L T D, T i a n j i n 3 0 0 0 7 2 , C h i n a )
子技 术 , 2 0 0 3 , ( 0 6 ) : 4 0 — 4 1
自动 化应 用 { 2 0 1 3 9期
3 2
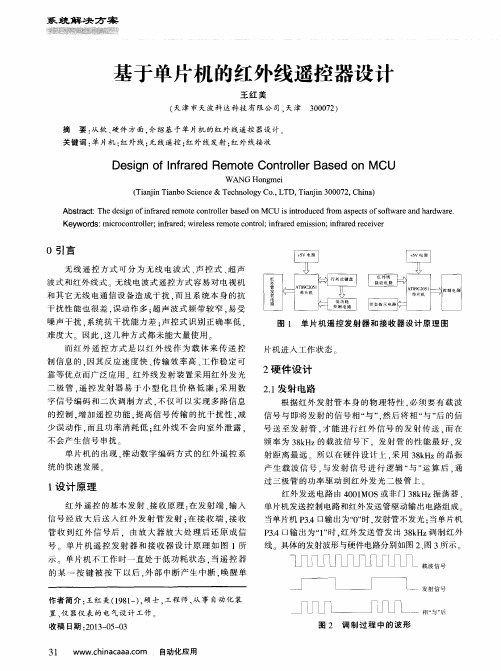
图1 单 片 机 遥 控 发射 器 和接 收器 设 计 原 理 图
难度大 因此 , 这几种方式都未能大量使用 。
而 红 外 遥 控 方 式 是 以 红 外 线 作 为 载 体 来 传 送 控 制信息 的 , 因其 反 应 速 度 快 、 传 输效率 高 、 工 作 稳 定 可 靠 等 优 点 而 广 泛 应 用 红 外 线 发 射 装 置 采 用 红 外 发光 二 极管 . 遥 控 发 射 器 易 于 小 型化 且 价 格 低 廉 : 采 用 数 字 信 号 编 码 和二 次 调 制 方 式 . 不 仅 可 以 实 现 多 路 信 息 的控 制 . 增加遥控功能 , 提高信 号传输的率 消 耗 低 : 红 外 线 不 会 向室 外 泄 露 ,
率。
参 考文献
该 系统在实 验过程 中运行 稳定 、 控制 准确 、 操作
一
。
—
5 I X T A L 1 P I . 4  ̄ 1
[ 1 】曹建 军 , 戴 兵. 无 线 遥 控技 术在 施 工现 场 的应 用—— 利 用 弱 电控制 强 电实现 节 能减 材[ J ] . 施 工技 术 , 2 0 1 1 ,
基于单片机设计的红外线遥控器毕业设计(论文)
学生毕业设计(论文)报告设计(论文)题目:基于单片机设计的红外线遥控器毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:毕业设计(论文)任务书一、课题名称:基于单片机设计的红外线遥控器二、主要技术指标:1.遥控距离:0~10m2.额定工作电压:直流3V(普通5号干电池2节);红外光平均辐照度≥40μW/cm2;指向性(辐照度为20μW/cm2)≥30度3.欠压条件下(直流2.4v):红外光平均辐照度≥20μW/cm2,指向性(辐照度为10μW/cm2)≥30度三、工作内容和要求:1.以AT89C2051单片机作为核心,综合应用了单片机中断系统、定时器、计数器等知识,应用红外光的优点2.遥控发射器通过对红外光发射频率的控制来区别不同的操作3.遥控接收器通过对红外光接收频率的识别,判断出控制操作,来完成整个红外遥控发射、接收过程四、主要参考文献:[1] 梅丽凤,王艳秋,张军等. 单片机原理及接口技术,北京:清华大学出版社,2004年.[2] 戴峻峰,付丽辉. 多功能红外线遥控器的设计,传感器世界.2002,8(12):16~18.[3] 李光飞,楼然苗,胡佳文等. 单片机课程设计实例指导,北京:北京航空航天出版社,2004年.[4] 苏长赞. 红外线与超声波遥控,北京:人民邮电出版社.1995年.学生(签名)2010 年 5 月7 日指导教师(签名)2010 年5 月10 日教研室主任(签名)2010 年5 月10 日系主任(签名)2010 年5 月12 日毕业设计(论文)开题报告基于单片机的红外线遥控器目录摘要Abstract第1章绪论 (1)1.1 红外概述 (1)1.2 外遥控的功能与特点 (1)1.3 选择红外遥控的原因 (2)1.4 红外的简单发射接收原理 (2)第2章设计方案论述 (3)2.1 设计目的与原理 (3)2.2 单片机红外遥控发射器设计原理 (3)2.3 单片机红外遥控接收器设计原理 (4)第3章遥控器硬件电路设计 (5)3.1 单片机AT89C2051介绍 (5)3.1.1 简介 (5)3.1.2 引脚介绍 (5)3.2 红外线遥控电路设计 (5)3.2.1 信号发射电路 (6)3.2.2 信号接收电路 (8)3.3 CPU时钟电路 (9)3.4 独立式按键结构 (10)3.5 掉电保护与低功耗设计 (10)3.5.1 低功耗的实现方法 (10)3.5.2 掉电保护与低功耗设计 (11)3.6 系统完整电路设计图 (13)3.6.1 红外发射电路图 (13)3.6.2 红外接收电路图 (14)第4章遥控器软件设计 (15)4.1 遥控发射器程序设计 (15)4.2 遥控接收器程序设计 (20)第5章结束语 (25)答谢辞参考文献本设计主要应用了AT89C2051单片机作为核心,综合应用了单片机中断系统、定时器、计数器等知识,应用红外光的优点。
基于msp430超低功耗单片机的irda红外数据通信

硬件设计及单片机片内 USCI_Ax 单元分析 USCI_Ax 模块的分析
MSP430G2553 内部配置有 USCI_Ax 单元,在该模 块中支持 IrDA 通信中的脉冲整形,要产生 IrDA 协议的信号 需要经过一系列配置。首先需要选择时钟,在 UC0CLK, ACLK,SMCLK 中选择一个作为时钟的频率,然后在分频 器和调制寄存器中选择合适的分频系数作为发送数据和接收 数据的时钟频率。为了将发送缓冲器中的数据以 IrDA 协议 的方式发送出去,以及能接收 IrDA 协议的红外信号,那么 就需要将 IrDA 的编 / 解码处于使能状态及选通 IrDA 的编 / 解码器。
陈志宏 杨瑞琳 曹 文 *
西南科技大学 信息工程学院 项目资助:四川省高等教育人才培养质量和教学改革项目(JG2018 - 504)
影响力
真实度 行业关联度
基于 MSP430 超低功耗单片机的 IrDA 红外数据通信
普通家用遥控器的红外串行输出多采用 NEC 协议,与基于 IrDA 协议的红外通信之间存在明显差异。基于 IrDA 协议的通信具有安全性 高、波特率高、硬件成本低等优点,在数字万用表等近距离数据通信代码较为复 杂,采用 msp430G2553 等低功耗单片机内部的串行通信状态机生成 红外 IrDA 信号,具有代码效率高、误码率低等优点,推广价值较大。
硬件电路设计
红外接收发送电路如图 3 所示,在该单片机的内部硬件 电路产生的 IrDA 的信号波形没有 38KHz 的载波信号,所以 就不能使用 HS0038 红外二极管接收头接收该红外信号,那 么就需要使用红外接收二极管来直接接收该红外信号,由于红 外接收二极管只是接收红外信号,不对信号进行放大的处理, 因此在电路中需要添加一个三极管,使微弱的信号放大。
基于MSP430F1101的智能学习型红外遥控器的设计

基于MSP430F1101的智能学习型红外遥控器的设计作者:宋祖辉孙富康戚鹏来源:《电脑知识与技术·学术交流》2008年第23期摘要:介绍了一款基于MSP430系列单片机的智能学习型红外遥控器的设计方案,给出了该系统的硬件结构和软件组成。
在人们日常生活和工作中,这款红外遥控器可以通过对任何红外遥控设备编码的学习、分析和记忆,以实现多个电器的统一管理。
关键词:红外遥控器;智能学习;单片机中图分类号:TN219文献标识码:A文章编号:1009-3044(2008)23-1016-03Design of Intelligent-learning Infrared Remote Controller Based on MSP430F1101SONG Zhu-hui1, SUN Fu-kang2, QI Peng2(1.Anhui Personal Test Academy, Hefei 230022, China;2.Anhui Institute of Architecture and Industry,Hefei 230601, China)Abstract: This paper introduces design of intelligent-learning infrared remote controller based on MSP430 microcontroller, and describes hardware structure and software of system. In daily living, through learning, analyzing, and storing infrared remote controller code, intelligent-learning infrared remote controller can archive to control several equipments.Key words: infrared remote controller; intelligent-learning; microcontroller1 引言在现代化的社会里,随着电子技术的日新月异,带有红外线遥控器的电气化设备越来越普及。
基于MSP430单片机的非接触式红外测温仪设计
率修正为真实温度萁 校正式为:
1 测 量 原 理
=
・
A
士
e
-1
图 l 是不 同温度下 的黑体光谱辐射度图 :
3 . 1 红外 采集 电路 红外测温仪器使用 的是 T P  ̄3 4 热电堆红外传感器 。热电堆红外 传感器 的原理是将多个热 电偶 串联起来 , 使其具有较 高灵敏度。 光学 系统起 到收集红外辐射并将其聚焦到红外探头上 的作用 , 由于红外信 、 红外 辐射损失小 的光学系统。在设计中可以在被测物体 和红外 传感器之间加一个透镜 , 以便聚焦红外线。 3 . 2 信号放 大电路 A D 6 2 3是一个集成单 电源仪 表放大器 , A D 6 2 3能在单 电源 ( + 3 一 + 1 2 V) 下提供满 电源幅度 的输出 , 并且 允许使用 单个增益 电阻设置增 益大小 , 具有很强 的灵活性 。 在无外接增益 电阻 的条件下 , 增益倍数为 1 ; 外接增益 电阻后 , 可编程设置增益 , 其增益最高可达 1 0 0 0 倍 。其增 益公式 G = 1 0 0 k O / / R , 式 中, G为放大器的增益倍数 ; R 为放大器 的增
【 摘 要】 红外测 温是 目 前 最主要 的非接 触式测 温方式之一 , 被广泛应用 于各行各业。本文设计 了一种基 于 M S P 4 3 0 单片机的非接触型红
外测温仪 , 其 工作原理是红外能量聚 焦在 T P S 4 3 4传感上并转化为相应的 电信号 , 该信号 经 AD 6 2 3仪用放大 器高倍放 大送 至 A D转换器, 然后 单 片机按 照仪 器内部 的算法计 算和温度补偿校正后 变为被测 目标的温度值 , 最后 通过 L E D显示 出测量温度值 。
msp430单片机红外遥控小车设计程序_1
/*************************************************************************原理:根据高电平持续时间判断信号传输的是0还是1进行解码方法:采用定时器这里用width=end-start,width的长度来判断解码信号为1还是0 功能:按一个键,单片机数码管上显示按键的用户码、数据码和数据反码**************************************************************************/#include <msp430f5438a.h>#include "PIN_DEF.H"#define uchar unsigned char#define uint unsigned intuint start = 0,end = 0; //计数开始和结束标志uint width = 0; //用于存放脉宽uint en = 0,n = 0; // en用于保存是否有引导码进入,n表示保存信号的数组IR[]下标uchar IR[32]; //先用数组将接收到的数据保存起来uchar IR_buf[4]={0x00,0x00,0x00,0x00};//IR_buf[0]、IR_buf[1]为用户码低位、用户码高位接收缓冲区// IR_buf[2]、IR_buf[3]为键数据码和键数据码反码接收缓冲区uchar disp_buf[8]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; //显示缓冲单元,初值为0x00,指向显示码的8个"0"uchar seg_data[]={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xbf};//0~F和"-"符的显示码(字形码)/* 50us的延迟函数*/void delay_50us(unsigned int t){unsigned int j;for(;t>0;t--)for(j=10;j>0;j--);}/********以下是显示函数********/void Display(){P8DIR = 0XFF; //段选方向打开P8OUT = seg_data[disp_buf[0]]; //用户码低P9DIR = 0x01; //选位P9OUT = ~0x01; //数码管第一位输出delay_50us(1); //延迟50usP8OUT = seg_data[disp_buf[1]]; //用户码低P9DIR = 0x02;P9OUT = ~0x02;delay_50us(1);P8OUT = seg_data[disp_buf[2]]; //用户码高P9DIR = 0x04;P9OUT = ~0x04;delay_50us(1);P8OUT = seg_data[disp_buf[3]]; //用户码高P9DIR = 0x08;P9OUT = ~0x08;delay_50us(1);P9DIR = 0x00;P8OUT = seg_data[disp_buf[4]]; //数据码P1DIR = 0x10;P1OUT = ~0x10;delay_50us(1);P8OUT = seg_data[disp_buf[5]]; //数据码P1DIR = 0x20;P1OUT = ~0x20;delay_50us(1);P8OUT = seg_data[disp_buf[6]]; //数据反码P1DIR = 0x40;P1OUT = ~0x40;delay_50us(1);P8OUT = seg_data[disp_buf[7]]; //数据反码P1DIR = 0x80;P1OUT = ~0x80;delay_50us(1);P1DIR = 0x00;}//***************************************************************************// // // // Init_Port(void): 设置IO端口//// // //***************************************************************************// void Init_Port(void){P5DIR |= POWER ; // 主电源MAIN_POWER_ON ;}//***************************************************************************//// // //函数:Init_CLK(void) ////功能:初始化主时钟: MCLK = XT2=16MHZ // // // //***************************************************************************// void Init_CLK(void){P5SEL |= 0x0c; //选择内部16MHZ晶振,将引脚作为第二功能使用P5DIR |= 0x0c;UCSCTL6 &= ~XT2OFF; //EN XT2//因为XT1未开启,所以给默认为XT1的时钟重新选择时钟来源UCSCTL4 |= SELA_1; //先将ACLK配置为VLOCLKUCSCTL3 |= SELREF_2; //将FLLREFCLK配置为REFCLKwhile (SFRIFG1 & OFIFG){UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // 清除时钟标志位SFRIFG1 &= ~OFIFG; // 清除时钟错误标志位}UCSCTL4 |=SELS_5; //将SMCLK时钟源配置为XT2}//***************************************************************************// // // // Init_IRUART(void): 设置红外端口//// // //***************************************************************************// void Init_IRUART(void){P1SEL |= (0x01<<2); //捕获的输入引脚P1.2P1DIR &= ~(0x01<<2);}/********以下是解码函数********/void Decode(void){if(width > 8600) //如果高电平时间大于4.3ms,则判断为引导码并将解码标志en置为1{en = 1;n = 0;}if(en == 1) //判断是否执行解码操作{if(width >=1700&&width <=4000) //当高电平时间>=0.85ms,<=2ms时判断为1 {IR[n] = 1;n++;width = 0;}if(width > 600&&width<1700) //当高电平时间<0.85ms,>0.3ms时判断为0{IR[n] = 0;n++;width = 0;}if(n >= 32) //当数组存满32位时,n清零,en使能标志位清零{en = 0;n = 0;}}}/*将IR[]里的值八位一组分开并转换到IR_buf[]里面,并将IR_buf的值转换成数码管显示的缓存*/void Process(void){if(n == 0){ //如果n == 0将IR[]的值转存到IR_buf[]里IR_buf[0]=IR[8*0]*128+IR[8*0+1]*64+IR[8*0+2]*32+IR[8*0+3]*16+IR[8*0+4]*8+IR[8*0+5]*4+IR[ 8*0+6]*2+IR[8*0+7];IR_buf[1]=IR[8*1]*128+IR[8*1+1]*64+IR[8*1+2]*32+IR[8*1+3]*16+IR[8*1+4]*8+IR[8*1+5]*4+IR[ 8*1+6]*2+IR[8*1+7];IR_buf[2]=IR[8*2]*128+IR[8*2+1]*64+IR[8*2+2]*32+IR[8*2+3]*16+IR[8*2+4]*8+IR[8*2+5]*4+IR[ 8*2+6]*2+IR[8*2+7];IR_buf[3]=IR[8*3]*128+IR[8*3+1]*64+IR[8*3+2]*32+IR[8*3+3]*16+IR[8*3+4]*8+IR[8*3+5]*4+IR[ 8*3+6]*2+IR[8*3+7];//if(IR_buf[2] == ~IR_buf[3]) //校验{disp_buf[0]=IR_buf[0]>>4; //取键码的低四位送显示缓冲disp_buf[1]=IR_buf[0]&0x0f; //右移4次,高四位变为低四位送显示缓冲disp_buf[2]=IR_buf[1]>>4;disp_buf[3]=IR_buf[1]&0x0f;disp_buf[4]=IR_buf[2]>>4;disp_buf[5]=IR_buf[2]&0x0f;disp_buf[6]=IR_buf[3]>>4;disp_buf[7]=IR_buf[3]&0x0f;}}}/********以下是主函数********/void main(void){WDTCTL = WDTPW + WDTHOLD; // 关闭看门狗Init_Port(); // 电源初始化Init_IRUART(); //红外端口初始化Init_CLK() ; //初始化时钟TA0CTL = TASSEL_2+ID_3+TACLR+TAIE+MC_1; //定时器A时钟信号选择SMCLK,8分频,//同时设置定时器A计数模式为增计模式TA0CCTL1 = CM0+SCS+CAP+CCIE; //输入上升沿捕获,CCI0A为捕获信号源TA0CCR0 = 20000; //设置计数器溢出时间为10ms_EINT() ; //开启全局中断while(1){Process(); //将IR[]数组缓存转换为数码管显示缓存函数Display(); //数码管显示函数}}#pragma vector=TIMER0_A1_VECTOR //定时器A中断处理__interrupt void Timer0_A1(void){switch(TA0IV) //向量查询{ case 2: //捕获中断if(TA0CCTL1&CM0) //捕获到上升沿{TA0CCTL1=(TA0CCTL1&(~CM0))|CM1; //更变设置为下降沿触发start=TA0R; //记录初始时间}else if (TA0CCTL1&CM1) //捕获到下降沿{TA0CCTL1=(TA0CCTL1&(~CM1))|CM0; //==更变设置为上升沿触发end=TA0R; //用start,end,overflow计算脉冲宽度if(end>start)width = end - start; //实际高电平宽度Decode(); //解码end = 0;start = 0;TA0R=0;}break;default:break;}}。
基于MSP430单片机的学习型遥控器设计

基于MSP430单片机的学习型遥控器设计MSP430单片机是德州仪器(TI)推出的一种低功耗、高性能的微控制器系列。
它在嵌入式系统中应用广泛,具有低功耗、高集成度、高性能和易于使用的特点。
在本文中,我将介绍基于MSP430单片机的学习型遥控器设计。
学习型遥控器是一种可以学习其他遥控器信号的设备,可以用来控制各种电器、设备和机器。
它通常包含一个红外发射器和一个红外接收器,可以通过学习其他遥控器的红外信号来实现对其他设备的控制。
首先,我们需要选择适合的硬件平台。
MSP430单片机系列中有许多型号可供选择,我们可以根据具体要求选择合适的型号。
同时,我们还需要一些外围设备,如红外发射器、红外接收器、按键和显示屏等。
接下来,我们需要进行硬件设计。
首先,我们需要将MSP430单片机与外围设备进行连接。
MSP430单片机具有多个通用输入输出引脚,我们可以使用这些引脚来连接外围设备。
例如,我们可以将红外接收器的输出引脚连接到MSP430单片机的一个输入引脚,以接收红外信号;同时,我们可以将红外发射器的输入引脚连接到MSP430单片机的一个输出引脚,以发送红外信号。
在硬件设计完成后,我们需要进行软件编程。
MSP430单片机通常使用C语言进行编程,我们可以使用MSP430单片机的软件开发工具包(MSP430SDK)进行软件开发。
首先,我们需要编写程序来接收和解码红外信号。
MSP430单片机提供了一些硬件辅助模块,如计时器和比较器,可以用来实现红外信号的接收和解码。
我们可以使用MSP430SDK提供的相关函数和库来简化这些操作。
然后,我们需要编写程序来发送红外信号。
MSP430单片机的输出引脚可以通过改变电平来发送红外信号,我们可以使用MSP430SDK提供的相关函数和库来控制输出引脚的电平。
最后,我们需要编写程序来控制其他设备。
我们可以使用MSP430单片机的输入引脚来读取按键的状态,然后根据按键的状态来发送相应的红外信号。
基于单片机的红外遥控器设计【开题报告】
开题报告电气工程及其自动化基于单片机的红外遥控器设计一、课题研究意义及现状红外遥控是目前家用电器中用得较多的遥控方式,在车载影音导航系统也被广泛的应用。
红外遥控的特点是不影响周边环境、不干扰其他电器设备。
由于其无法穿透墙壁,故不同房间的家用电器可使用通用的遥控器而不会产生相互干扰;电路调试简单,只要按给定电路连接无误,一般不需任何调试即可投入工作;编解码容易,可进行多路遥控。
由于各生产厂家生产了大量红外遥控专用集成电路。
因此,现在红外遥控在家用电器、近距离(小于10米)遥控中得到了广泛的应用。
自2005年起,台湾与中国大陆遥控设备产量约占全球总产量的80%,且受海外市场对家用自动化与娱乐应用与产品需求的快速增长的刺激,其出口总值仍在上升。
近年来,随着遥控制造产业的不断成熟,遥控器市场竞争十分激烈。
因此红外遥控的研究具有重大现实意义。
通常红外遥控使用专门配对编码、解码芯片,即某种解码芯片只能识别某种编码芯片的编码,对其他型号的编码芯片的编码则不能识别,因此不同的遥控器没有互换性,造成使用场合有多个遥控器,用户深感不便。
因此提出了利用单片机作为主控芯片,结合红外遥控用户码的设置,自行设计编码和解码程序,实现一个遥控器控制多台设备的方法。
基于单片机的学习型红外遥控设备,拥有用于控制用电器的电源供给、调节用电器的功率的等多种功能,不仅可指定使用现有的任意一个红外遥控器实施控制。
还可以进一步设定具体用哪一个按键控制,具有学习记忆功能。
红外遥控技术作为遥控方面的佼佼者,拥有性能稳定,技术成熟,容易实现等特点。
采用单片机为基础的红外遥控在此基础上又多了一机多操作的特点。
由此可见,发展红外技术,不但有巨大的市场前景。
还可促进整个行业的发展,同时该技术也势必对人们的生活产生更加深远的影响。
二、课题研究的主要内容和预期目标本课题以单片机为控制核心,设计红外发射、接收电路,存储电路,键盘输入电路和显示电路,并制作一个具有自学习能力的红外遥控器,可以实现对多路电器的红外遥控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
器设计
4.1总体硬件框图 笔者设计的这款红外遥控器,不仅能设置控制对 象的给定值或控制参数,并通过红外线发送给对象, 而且能接收并显示对象通过红外线反馈回的实际值, 这是它不同于普通红外遥控器的地方。因此,实际应 用中.红外遥控器和控制对象上都装有红外发送电路 和红外接收电路。红外遥控器的硬件部分主要包括五 个模块:电源模块、键盘模块、液晶模块、红外发送模 块和红外接收模块。总体硬件框图如图1所示。由于 MSP430、红外发送模块和红外接收模块都可采用3V 电源,所以电源模块采用两节1.5V电池供电即可。键
红外发射端发送数据时,是将待发送的二迸制数 据调制成一系列的脉冲信号后发射出去。红外载波为 频率38KHz的方波,采用脉宽调制PWM方式发送,通 过待发送二进制数据的“0”或“1”控制两个脉冲之间 的时间间隔,及PWM的占空比。红外载波既可以通过 外围硬件电路实现。也可以使用单片机内部的定时器 的PWM功能实现。
图4红外发送程序流程图
3V
图5红外接收电路 4.3红外接收模块 红外接收电路选用Vishay公司生产的专用红外
接收模块TSOPl838SS3V(以下简称1838)。该接收模 块是一个三端元件,使用+3V电源。具有功耗低、抗干 扰能力强、输入灵敏度高、对其它波长(950nm以外)的 红外光不敏感的特点。1838的工作原理为:首先,通过 红外光敏元件将接收到的载波频率为38kHz的脉冲 调制红外光信号转化为电信号.再由前置放大器和自 动增益控制电路进行放大处理;然后,通过带通滤波 器进行滤波,滤波后的信号由解调电路进行解调;最 后,由输出级电路进行反向放大输出。
文章编号:1008-0570(2006)10-2--0223-03
单片机开发与应用
基于M S P430单片机的红外遥控器设计
Hale Waihona Puke Design of Infrared Controller Based on MCU MSP430
(1.中南大学;2.湖南财经高等专科学校)阎 纲1,2梁昔明1
Yan,Gang Liang,Ximing
图1总体硬件框图 4.2红外发送模块 红外发射电路如图2所示,在这里选用普通的红 外发光二极管(SE303、PH303)来发射红外信号,利用 MSP430F413的P2.1口做输出口。当P2.1口输出高电 平时,三极管导通,于是红外发光二极管有导通电流 通过,开始发射红外光。
vCC
MSP430F413 P2.1
本文作者创新点:本文中的红外遥控器主要用于 现场仪表的控制。目前带遥控器的现场仪表还非常 少,国外也只有SIEMENS公司开发了带有遥控功能 的现场仪表,而国内这种产品几乎没有.所以红外遥 控器的开发,可以说走在了国内同类产品的前列,具 有很大的市场优势。而且,通过红外遥控器的开发和 使用,适应了现代社会对控制的要求日益向便携式、 简单式方向发展的趋势。 参考文献: [1】柏军湖屏.一种用于单片机的E¥1-串行通信接13.单片机及嵌 入式系统应用,2003.8 [2】蒋俊峰.基于单片机的/c#l,通讯设计.电子设计应用,2003.11 【3】魏小龙.MSP430系列单片机接口技术及系统设计实例.北 京:北京航空航天大学出版社.2002 【4】陈茂勇,郭西进.基于MSP430单片机的智能无功补偿控制器
摘要:本文首先介绍了红外通信的基本原理;然后简要介绍了1rI公司的MSP430单片机的功能特点;最后介绍了一种基于
MSP430单片机的红外遥控器的设计方案,并给出了硬件电路和程序流程图。
关键词:红外通信;MSP430单片机:红外遥控器
中图分类号:TP271
文献标识码:B
Abstract:This paper introduces the basic principle of infrared communication at first.Then,it simply introduces the features of TI S MCU MSP430.At last,it presents a design of infrared controller based on MCU MSP430,and gives hardware circuits and program
红外接收端在收到38KHz的载波信号时.会输出 低电平,否则输出高电平,从而可以将“时断时续”的 阎纲:博士
万方数据
红外光信号解调成一定周期的连续方波信号,经单片 机处理.便可以恢复出原数据信号。
3 MSP430单片机简介
MSP430单片机是TI公司推出的一个新型单片机 系列,其主要特点是:超低功耗、16位指令、内置A/D 转换器、串行通信接口、硬件乘法器、LCD(液晶)驱动 器及高抗干扰能力等。因此,MSP430单片机特别适合 应用在智能仪表、防盗系统、智能家电、电池供电便携 式设备等产品之中。笔者在开发这款遥控器时,选用 的单片机型号是MSP430F413,其性能特点如下:低工 作电压(1.8~3.6V);超低功耗(工作模式4下耗电仅 为0.1斗A);16位精简指令结构(RISC);150ns指令周 期:带有3个捕获/I;L较器的16位定时器;片内集成 96段LCD驱动器:片内有JTAG调试接口和FLASH 型存储器,可在线串行编程;开发环境十分方便高效, 支持C语言和汇编语言。
相全桥变换器滞后臂在轻载时不易实现软开关的缺
陷,减小了占空比的丢失,提高了高频变压器的利用 率,同时使软开关易于实现,因此提高了变换器的效
率。所提出的关键参数的设计方法在工程匕有指导意义。 参考文献: [1]阮新波,严仰光.脉宽调制DC/DC全桥变换器的软开关技术 [M].北京:科学出版社,1999 [2]姜久红,朱若燕,姜久春.一种新型控制的ZCT—PWM变换器 的分析、设计与实现[J】.微计算机信息,2000,5:84—87 [3】阮新波,严仰光.直流开关电源的软开关技术[M].科学出版社2003 [4】J.G.Choj.A.Sabate,G.C.Hua,and F.C.Lee,"Zero-vohage and zero current switching full-bridge pwm converter for hi曲power appli-
(上接第127页)
5结论
实验表明,采用以上原则设计的参数,能在较宽
的范围内满足ZVZCS,尤其是滞后臂,极大的改善了
ZVS’移相全桥DC/DC变换器滞后臂在轻载时不易实
现软开关的缺陷。而且占空比损失小。样机整体性能
优良,效率可达92%。
.一
本文的创新点是将饱和电感应用于大功率移相
全桥变器中,利用饱和电感的特性,极大的改善了移
红外发光二极管发射波形如图3所示。先发一段 前导码,以检验这组码是否为想要的码。前导码由一 个9ms的高电平和一个4ms的低电平组成。然后再发 32位数据代码,其中高电平为0.5ms,低电平为o.5ms 的一个周期为代码“0”:高电平为0.5ms。低电平为 1.5m8的一个周期为代码“1”0为了提高发射功率,实
这里利用软件来实现这个功能。即在需要输出高 电平的时候,让程序定时把P2.1口输出状态反向,其 中定时时间是由指令数和指令周期来决定的,每条指 令的指令执行周期是固定的,所以如果想让反向频率 高一些,则让指令执行的少一些.反之就让指令多一 些。可见输出信号占空比可以由定时时间的长短来决 定,这样就可以在高电平时输出占空比尽量小的脉冲 信号。因为接收头对38KHz的光信号转换能力比较 强,所以把高电平的频率设置为38KHz。在需要输出 低电平的时候,控制P2.1口一直为低就可以了。
cations",IEEE-PESC,1994,PP.102-108.
[5】陈坚,电力电子学[M】.高等教育出版社,北京:高等教育出版 社.2004
作者简介:吴鸿霞(1967一),女,湖北武汉人,硕士,研究
方向为电力电子与电力传动。Email:wuhxpb@tom.com. (435003湖北黄石理工学院电气与电子信息工程学 院)吴鸿霞马学军 (School of Electrical and Electronic Information Engineering, Huangshi Institute of Technology,Huangshi Hubei435003) Wu,Hongxia Ma,Xuejun 通讯地址:(435003湖北黄石理工学院学报编辑部)吴鸿霞
返回。下一步,判断脉宽的大小。若是起始码,则起始
(收稿日期:2006.2.13)(修稿日期:2006.3.17)
图6红外接收中断程序流程图
5结束语
在遥控器开发中,红外发射电路采用红外发光二 极管,用软件生成38K的载波;红外接收电路采用专 用模块TSOPl838SS3V:主控制器采用MSP430F413 单片机。经实际测试,遥控器的发射功率约为38mw, 发射距离达到8m。遥控器具有低功耗、便携式、低成 本、高可靠性、体积小、结构简单的特点。
@瞅搠邮局订眠82锄360 m223—
单片机开发与应用
中文核心期刊《微计算机信息》(嵌入式与SOC)2006年第22卷第10一2期
盘模块采用4x4行列扫描式键盘。液晶模块由 MSP430F413直接驱动。
际工作时,发光二极管的高电平用38kHz的载波信号 载波,低电平则一直为低。
红外发送程序流程图如图4所示。即先发出前导 码.然后再按发出的是‘0’或‘1’来发出不同的数据 码,每发送完一位,就让码长计数器hum加I,直到 num加到32时,发送停止。
flow charts.
Key words:Infrared communication,MCU MSP430,Infrared controller
1引言
在工业控制的许多环境下,不适合操作人员直接 控制,例如:高温、高压、辐射、粉尘、强酸性、腐蚀性、
有毒 气体等。这时,红外遥控是可行的控制方式。通过