基于PIC单片机的AGC控制系统设计研究
基于PIC单片机的无刷直流电机控制系统
科技风 "#$% 年 & 月
基于 G*H单片机的无刷直流电机控制系统
李小枝
佛山市安尔康姆航空科技有限公司!广东佛山!"#$%&%
摘5要基于 M#C单片机的无刷直流电机控制系统的出现可以让人们对无刷直流电机控制系统的要求得到满足 无刷直流 电机可以在延长电机定期维护修理时间的基础上促进电机使用效率的提升 本文主要从无刷直流电机控制系统方案入手对无 刷直流电机控制系统的硬件设计和软件设计等问题进行了探究
关键词M#C单片机无刷直流电机控制系统系统硬件设计
55随着社会生产技术与人们生活水平的提升#无刷直流电机 已经在航空航天"国防科技和家用电器等多个领域得到了应 用$ 根据单片机技术的发展现状#基于单片机技术和 !EM微处 理器技术的数字系统已经逐步取代了传统的模拟系统$ 基于 单片机的无刷直流电机系统的出现#在节约生产成本的同时# 发挥出了降低电路 MCF板布线难度的作用$
交流电转变为 ($%I直流电$ 直流电压可以被看作是逆变单元 的直流母线电压$ 根据控制器的要求#逆变单元可以将直流母 线电压逆变为交流电压#并将其施加在电机绕组之上$ 整流电 路和功率电路是无刷直流电机控制系统功率电路的重要组成 部分$ 一般情况下#在电流突变至零以后#无刷直流电机绕组 会在电流突变瞬间感受到较大的电压$ 在换相阶段#相电流的 缓慢下降#可以为功率器件和电机提供一定的保护功能$ 出于 保护电机的需要#人们还需要对电机的电流和温度进行检测# 对此人们可以通过电源对地端连接一个取样电阻#并让取样电 阻发挥出电流传感器的作用$
基于PIC单片机的多点温控系统的设计与实现

化工 、 材 、 品、 建 食 机械 、 油等 工业 中 , 石 具有 举足 重轻 的作 用。根据不 同生产所 需温度 范围和精度要求 , 采用的测温元 件、 方法 以及对温 度的控制方法 也有所 不同。随着 电子技术
据, 显示温度 数据 , 根据 数据判 断测控对 象要执 行的动作 以 及 发送 控制命令 。在多 点系 统中 , 由于系统复杂度增加且 单 片机性能有限 , 需要简化单片机 的任 务 。单片机只需要接 收 测控对 象的温度数据和转 发控制命令 即可 。 () 2 增加微 型计算机执行运算任 务
电源 电路
H1 I. 图 1 单 点温 度测 控 硬件 电路结 构
由图 l 可知, 除了键盘和 测控对象外 , 点系统与外接没 单 有交互 。 这远远不能满足当前生产 过程 自动化 的控制要求。 自 动化生产要求生产过程中的各个环节紧密配合、 协调一致 , 以 达到最高的生产效率,测控对象的温度控制更是如此 。因此
图 2 多 点 系统体 系结构
在多点系统体 系结构中 , 一个测控部分 与单点系统 比 每 较 类似 , 由测控 器 、 传感 器和 控制 驱动 器 组成 , 为 测控 单 称
作者简介 :方庆黎 , 河南洛阳人 , 男, 讲师, 研究方向:计算机工业应用。
一
5 — 2
硬件 技术 与 研 究 ■—
述。
硬件 电路设计 、测控器硬 件 电路设计和 控制驱 动器硬件 电
路设计 。下面分别对 它们进行介绍 。
() 信 适 配 器 电路 设 计 1通
5 .软件系统设计
工业系统 的通信 可以采 用多种方式 , 系统采用 RS 3 本 22
多点温度 控 制系统 的软件主 要分为上 位机程 序和 单片 机 程序 。其 中上位机程序 又分为温度显控模 块和通信模块 ; 单片 机程序 分为温度采样 模块 、 信模块和控 制模 块。 通
AGC控制系统与PLC设计

HTAGCVIEW@轧机厚度计算机控制系统一.概述黑色和有色的板带材用户随着市场需求对板带产品的规格和质量都提出了更高要求,板带加工厂的工艺装备要能满足多规格、高精度、高效率的生产需求,而其主要设备液压轧机的自动化控制水平却严重制约着轧制的产品精度和生产率。
现代化轧机的水平主要体现在能实现高速轧制、高精度的厚度公差、良好的板形、高的生产率的产品等,其控制系统应能够提供多种手段来满足上述的要求。
本公司开发的HTAGCVIEW@计算机控制系统为用户提供了全面解决方案。
二.控制系统的配置方案HTAGCVIEW@采用上、下位两级计算机控制方案,是集轧机过程控制、过程管理、AGC控制和故障报警诊断为一体的计算机系统。
上位机由轧制过程管理计算机(网络服务器)组成:下位机由辊缝控制计算机、厚度控制计算机完成实时控制,配置多台独立的显示操作站(人机界面MMI),并与轧机PLC联网,组成液压轧机的整体自动化系统。
系统的配置见图1。
1. 通讯网络:上、下位机之间的数据通信采用以太网(Ethernet),开放式网络结构,TCP/IP网络通讯协议。
采用Windows NT网络操作系统。
2. 计算机配置:所有计算机均选用PC总线PentiumⅢ以上档次的工业控制计算机。
其中轧制过程管理计算机采用PentiumⅢ、128MRAM的研华IPC-610工业控制计算机。
3. 工程师台:轧制过程管理计算机、打印机。
4. 控制柜:分AGC计算机柜和AGC接线端子柜。
19〞上架结构,内配一个显示器和一个键盘。
5. 机前操作箱:轧机左右侧各设置一机前操作箱,分别安装左右机前触摸计算机。
基于上述硬件配置的软件系统是集轧制过程控制和自动厚度控制为一体的模块化软件系统,由辊缝控制程序、厚度控制程序、轧制过程管理程序、数据显示及操作控制程序、故障诊断及远程诊断等应用程序组成。
全部应用程序基于美国微软最新的网络操作系统Windows NT下,采用微软最新的软件开发工具Visual Basic和Visual C++编写,运行于WINDOWS 环境下,软件维护非常方便。
基于PIC单片机焊接跟踪器控制系统设计

子程 序模 块 ,运 行 过程 中通 过 主程序 调用 功能 子 要求 。
一
4 — 5
一
图 1 跟 踪 器 系 统 工作 原 理
图 2 主程 序 流程 图
‘
.
一
』
_ ¨
1
I
’ _ L J
— 1
■一
i
。 . I
! 1 _ _ _ ’
}
图 3 伺服 电机 闭环 控 制 方 框 图 6 结论 6 以 P C 6 8 7为 . 1 I 1F 7
艇, 以及各种金属结构等=业部门. 工 可以预言, 示。 当启动 程序 时 , 片机 立 即进行 各 个端 口的 单 推动我国经济建设和发展科学事业上 ,焊接技术 初始化 工作 , 初始化完成后, 单片机控制系统处 将起 到重要 的作 用I “ 。电弧焊 是焊接 结构 生产 中 的 于待命状态, 等待开关按下。一旦开关按下 , 电 主要 焊接 工艺 方法 ,其 应用 量 占所有 焊接 生 产量 源接通 , 调用参数读人子程序 , 即读入预先设定 的 7%以上 。目前 , 国的焊 接 自动化 水平 与发达 的焊接 速度 、 枪对 中参 数等 。然 后 , 照读 入 5 我 焊 按 国家相 比还有 ・ 差距 ,因此 实现焊 接 过程 自动 的焊接 速 度 、 枪对 中参 数开 始进行 焊接 。 定 焊 在正 具有 非常 大的经 济和社 会意 义口 现在 应用 于焊缝 常焊接 过程 中, 时检测 行走 速度 、 枪对 中参 实 焊 跟 踪系统 的两 大 主流传 感器 类 型是 电弧 式传 感器 数等 参数 的变化 , 以便 随时调 整焊 接速 度 、 焊枪 和激光传感器。电弧式传感器直接检测电弧的电 对 中性 焊接完 成 后 ,控 制器输 出停 止焊 接信 流 和电压 , 测 点和焊 接 点是 同 一个位 置 , 需 存 号 , 检 无 跟踪 器停止 工作 。 焊枪 上添 加辅 助设 备 ,实 时性好 ,不怕 电弧 的 飞 5 系统 的稳 定 『 生分析 。 存本 控制 系统 中 , 无 溅、 烟尘 、 光等 影 响 , 本低 , 到 r广 泛 应 用 论是 步进 电机还 是育 流伺 服 电机在某 些情 况下 弧 成 得 但 由于 电弧 传感 器的 系统 只有 在 电弧点 燃后 才 能 可能存在振荡和失步的现象,为实现对焊缝跟 工作. 在跟踪 过 程 中要 进 行跟踪 或 旋转 , 且只适 踪盼h速反映及精确定位 , 而 夹 减少误差, 保证焊缝 便 冈此 , 本焊 接 跟踪 用 于对称 接头 的丁件 , 用范 围有 限 : 应 随着传 感 技 质 量 , 于焊 接 小车 的启 停 , 。以伺 服 电机闭 环控 制为例 术 的发展 ,激 光传 感器 彳焊 缝跟 踪过 程 中得 到 了 系统 采用 闭环控 制日 F 广泛 应用 。利用激 光传 感技 术来 获取 焊 缝特 征信 分析 该系统 的稳 老 陛 。伺 服 电机闭 ̄- 制 方框 r 4 g 息 , 有 信息 量 大 、 ] 件不 接 触 、 敏 度 和精 确 图 如 3图所 示 。在 图 3中 ,. 具 与 _ 灵 K 为处 理 电路 的放 K× k 度高、 电磁干扰能力强等优点 , 抗 适合各种坡 口形 大系数 , K 为电压放倍数 , 为反馈的放 由伺 在 状 ,而且可以同时进行焊缝跟踪控制和焊接质量 大 系数 ; 服 电机 的静 态抒 陛可知 , 电机 加 负 电机存在着死区, 因而伺眼电机 的数 的控制, 是最具有发展前途的传感技术。因而设汁 载的情况下, 个以 中等 性能 的 8 单 片机 PC单 片机 为核 心 学模 型 实际 h 一个 非线 性 环节 ,但在 不影 响 系 位 I 是 一 传递函数可简化为 的控制 系统 ,实现 对 焊接跟 踪 器行 走速 度和 纠偏 统稳老 的前提下 , 处 理的精 确 、 速控 制有 着很 强的现 实意 义: 快 本研 ( s c +) 1 究采用激光传感器作为信息采集元件,将性价比 式 中: 卜— 机 转角 的拉 氏变换 ;as ( s U (卜一 高 、抗干 扰能 力强 的 PC 单片机 引入 到焊枪 跟 踪 I 器 中 , 程序 软件 实现 跟踪 器 的速 度凋 节 、 偏 电枢 电压 自{ 通过 纠 勺 氏变换 ;n —朝 l时 间常数。 Tr 械 处理的数字化控制, 以降低控制电路的复杂性 、 增 由图 3 可以求得系统的开环传递函数为 K 、 T X X 强 L 呵靠性 。 作 w 一 ! 一 ¨ S 2焊接跟踪器T作原理。焊缝 自动跟踪系统 ” +I ) ( 丽 般由检测机构( 激光传感器)信息处理系统 、 、 控 T 一 j, 中 , 一 KKK 其 丽 ,, ̄ r 制器、 跟踪执 行机 构和调 整机 构组 成 . 焊接过 程 . 存 i 。 中检测机构( 激光传感器 ) 不断检测有关焊缝 中心 般 闭环 系统 的传 递 函数为 位 置 的信息 , 后输 出控 制信 号 , 然 当焊枪  ̄ I 女 tt 『 , r性 ) = 时 ,执 行机 构根 据得 到 的控制 信号 产 生所需 的预 设 该系统 传递 函数 的 分 母等 于 零 ,即可得 出 定运 动 ; 枪 对 中性 不好 时 , 测 机构 ( 光 传 系统 的特征 方程 1 H( =0 当焊 检 激 +G( ) ) 感器 )将采集到信 号通过信号处理系统传给控制 系统的稳定陛决定于特征方程 ,特征方程的 器( 单片机) 辱信号传给调整机构对焊枪的位置 根落任『 平面的左半部分, 再I c 腹 系统是稳定的。 进行对中调整, 实现焊缝的实时跟踪。这其中, 信 将I 节的开环传递函数写为根的形式为 息处理机构起着至关重要的作用 ,它直接决定着 其 中 一 。 输 出信号的正确与否,从而影响执行机构的焊缝 由系统 的开 环传 递 函数 可知 ,该 系 统 为 I 型 跟 踪精 度 。系统工 作原 理如 图 1 所示 : 系统 , 有j 个开 环极点 , 有零 点 。 没 其根轨 迹 如图 4 3系统硬件设计。 根据跟踪器的控制要求, 要 陔系统 的开 环极 点 中有 一个 求 该 系统实 现具有 功能 :行 走速 度显 示 电路 ;. a h 信 所 示 。由根轨 迹可 知 , 因而系统属于临界稳定状态。 要使系 息采样 电路 ; 服 电机驱 动 电路 ( 走电路 )d 伺 行 ;. 步 与虚轴相交 , 统达到稳定状态的条件是使 K 。又由于 T> , ≯O 0 进电机驱动电路( 焊枪对中控制 ) 。 都大于零就能使系统达到稳定 T 4系统软什谢 { ‘ 。本设计中控制软件采用模 所 以只要使 T、 经 能 块化设 汁方法 ,以主程 序为 核心设 置 了许 多功 能 状 态 。 过实 验测 试该 系统稳 定 的 , 够满 足实 际
基于PID控制的AGC宽频带放大器设计
设计与制 作 AGC 功 能 的 宽 频 带 放 大 器 的 总 体 方 案图如图 1 所 示. 首 先 硬 件 部 分 选 择 超 宽 带,大 于 40 dB 增益调 节 范 围,线 性 dB 可 变 增 益 放 大 器 VCA821. 放大后 输 出 至 检 波 电 路,检 波 输 出 波 形 峰 值. 通 过 Stm32A/D 采 样 ,在 Stm32 内 部 使 用 PID 算 法 使 [7] 输 入变量稳定在同一个值.然后通过单片 机 D/A 输 出 至 VCA821的控制端Vg ,从而调节 放 大 器 的 增 益,形 成 一 个 闭 环 系 统 . [3]
芯 片 控 制 端 ,形 成 一 个 闭 环 系 统 . 实 际 应 用 表 明 :该 放 大 器 具 有 快 速 、稳 定 、低 功 耗 等 优 点 .
关键词:AGC 自动增益控制;VCA821;PID 算法;Stm32F103zet6处理器
中 图 分 类 号 :TN722 文 献 标 识 码 :A
彭智刚:基于 PID 控制的 AGC 宽频带放大器设计
信息与技术
低频 阻 高 频 ,相 当 于 一 个 低 通 滤 波 器 . [1] 之 后 旁 路 一 个 50Ω 电阻到地,其作用为源 匹 配,在 输 入 端 作 为 输 入 电 阻50Ω,减少信号反射对信 号 源 的 损 坏,并 且 使 得 信 号 尽量多的传输.
2019 年 4 月
JournalofGreenScienceandTechnology
第8期
基于 PID 控制的 AGC 宽频带放大器设计
彭智刚
(西南科技大学 信息工程学院,四川 绵阳 621000)
摘要:指出了在高频通信系统中,AGC 自动增益控制电路得到广泛应用.在输入信号幅度变化很 大 的 情 况
《PIC系列单片机C程序设计方案...

《PIC系列单片机C程序设计方案...学习之6---看门狗定时器(WDT)//PIC.H中定义了宏#define CLRWDT() asm("clrwdt")因此在PICC的c语言中可以直接使用CLRWDT()对WDT清0//若单片机WDT使能,在适当位置加入CLRWDT(),程序进入正常运行时,每隔一定时间均会执行CLRWDT()语句对WDT清0,芯片不会复位//如果程序陷入死循环,不会执行到CLRWDT()语句,则超出所设定的时间后,WDT溢出使芯片复位,从头(000H)开始执行,单片机恢复正常运行//PIC16F单片机,看门狗定时器的启用只能在芯片的烧写时确定,即无法用软件来开启或关闭WDT,但在PIC16f88X中可以。
//PIC16单片机的WDT基本溢出时间为18MS,由RC充放电时间确定,在-40~85度之间变化时,WDT基本溢出时间在7-33ms变化#include__CONFIG(0X3F3D)。
//开启WTDvoid DELAY(unsigned int)。
#define LED1 RB1main(void){TRISB=0B11111101。
OPTION=0B11111011。
//WDT的分频比为1:8,最大复位时间为18*8=144ms if(TO==0)// 若写成T0,则编译出错。
{LED1=1。
//看门狗定时器溢出,仿真时溢出TO不会清零 }elseLED1=0。
while(1){DELAY(100)。
//模拟一个运行100ms的子程序CLRWDT()。
DELAY(200)。
//模拟一个运行200ms的子程序,此时会产生溢出(200ms>144ms)CLRWDT()。
}。
}void DELAY(unsigned int n) {unsigned int j。
char k。
for(j=0。
j0。
k--) NOP()。
}学习之7--EEPROM的读写EEPROM特点:掉电时保持不变,F877A的EEPROM参数是保证1 000 000次擦除,数据保存>40年PICC中定义了读/写EEPROM的宏EERPOM_WRITE(addr,value)。
基于PIC单片机的永磁无刷直流电机控制系统

中文核心期刊 《微计算机信息》(嵌入式与 S O C )2005 年第 21 卷第 12-2 期
基于 PIC 单片机的永磁无刷直流电机控制系统
PIC Ba s e d DC Mo to r Co n tro l S ys te m
(1.武汉海军工程大学;2. 无锡总装工程兵科研一所)赵 乾 宏 1 张 静 远 1 兰 士 新 2
PIC16F877A 单片机具有 5 个输入/输出端口,特 别需要指出的是单片机内置了两个 CCP 模块,即输入 捕捉、输出比较、脉宽调制模块。本系统就是利用了 PIC 单片机此脉宽调制模块输出脉宽可调的信号,实 现直流电机调速。
2 基 于 PIC16F877A 单 片 机 的 电 机 控 制系统方案
4 结语
本文首次将监控软件+应用服务器+现场总线以 及浏览器+WEB Server+CGI 两种技术融合到智能家庭
技 网关产品中,较好的解决了传统产品的缺陷。通过本
系统在实际家庭智能网络中的运行表明,该系统达到
术 了设计初期的各项要求,能够通过 Internet 实时控制系 创 统中的智能家电并精确的获取家电状态信息。相信在
数据库发送传送参数指令,现场控制系统接到指令后 进行检索,并返回查询结果给虚拟数据库最后显示在 用户监控界面中。当用户发出控制指令时,无论是在 家庭网络内部还是外部,控制指令都可以通过不同的 网络协议可靠地到达被控对象并完成相应的操作,最 后把执行结果(成功或者失败)返回给指令的发出者。 在一般的 C/S 概念中,客户端是廉价的个人 PC,服务 器是价格昂贵、功能强大的专用 Server。但对于本系统 来讲,嵌入式家庭网关是应用服务器和 Web 服务器的 宿主,而嵌入式系统本身资源有限,所以在事物处理 时不应将过多的任务分配给服务器,避免因服务器负 担过重而使整个网络性能下降,要充分发挥客户端计 算机的作用,合理分配网络资源,提高数据处理的效 率。
毕业设计正文:基于PIC单片机的遥控探照灯的设计

目录摘要 (1)Abstract (2)第1章前言 (3)1.1 课题研究的背景 (3)1.2 课题主要研究工作 (4)第2章方案选择及验证 (5)2.1 通信类型的选择 (5)2.2 主控芯片的选择 (6)2.3 方案确定及验证 (9)第3章硬件系统设计 (10)3.1 系统总体结构设计 (10)3.2 CPU模块 (11)3.3 通信模块 (14)3.4 灯控模块 (20)3.5 电机模块 (22)3.6 电源模块 (24)3.7 总电路图 (25)第4章软件设计 (26)4.1 软件部分总体分析 (26)4.2 流程图 (27)4.3 具体程序设计 (28)参考文献 (30)致谢 (31)附录:源程序 (32)基于PIC单片机的遥控探照灯的设计摘要:在舞台上,有时为了营造某种特殊效果,需要关闭除探照灯以外的所有现场灯。
针对舞台、监狱、各种高空作业,设计一种支持数据存储的遥控探照灯系统则具有相当大的实用价值。
本文通过无线控制探照灯上下左右360度自由转动及灯光亮度256段控制,以达到尽可能的满足舞台需求。
在发送探照灯转动控制、亮度控制等命令时采用无线发送,单片机则通过接收无线遥控信息,从而实现准确、方便的调节,实现探照灯的功能。
该方案通过试验结果表明,该系统性能稳定,可准确地完成灯控、转动,以及频道的存储及调出等功能,并具有操作方便、简单的优点。
关键字:PIC单片机;无线遥控;步进电动机;Based on the PIC microcontroller remote controlthe searchlight designAbstract:On stage, Sometimes in order to create a special effect, Need to shut down all the scene outside except the searchlight lights. Aimed at the stage, prison, various aloft working, Design a support data storage remote control the searchlight system has considerable practical value .This article through wireless control the searchlight up, down, left and right360-degree free rotation and lamp brightness 256 section control, In order to achieve the meet needs. As possible stage .When sending the searchlight turn control, brightness control command , used by wireless transmission, microcontroller is receiving wireless remote control information, thus realize accurate, convenient adjustment, realize the searchlight functionThe plan by the experimental results show that the system has stable performance, we can accurately finish lamp control, rotation, and a channel storage, and has the a dvantages of convenient operation, sim.Key word: PIC microcontroller; Wireless remote control; Stepper motor第1章前言1.1 课题研究的背景在舞台上,有时为了营造某种特殊效果,需要关闭除探照灯以外的所有现场灯。
基才PIC的汽车空调控制器的设计

基才PIC的汽车空调控制器的设计王文涛;贾志成;张艳【摘要】对于汽车空调这类强非线性系统,普通线性控制策略难以满足对控制效果的要求,智能控制策略更适合控制这类系统。
简要介绍模糊控制原理,对其在汽车空调混合风门的控制进行详细介绍,结果表明具有较高的控制精度,分别从硬件及软件设计两个方面进行了阐述,对控制系统的控制单元进行了设计,采用PIG 单片机作为控制单元处理器,对控制规则进行了设计。
系统具有可靠性高、抗干扰能力强、电路简单等特性。
%Linear control method is not suitable for controlling the non-linear system such as car air-conditioning system, while intelligent control method such as the fuzzy control method will control the system finely. The Fuzzy control theory is introduced simplily. And the use of it on the control of automotive air conditioning airmixing damper is introduced in details, the method has higher precision, also discuss the design from not only hardware but also software, control unit of control system is designed and taking PIC singleehip as processor,and the fuzzy logic rules is designed. The system has excellent characteristics, such as the high reliability, the strong antijamming ability, the simple circuit and so on.【期刊名称】《电子设计工程》【年(卷),期】2011(019)024【总页数】3页(P161-163)【关键词】汽车空调;模糊控制;混合风门;PIC【作者】王文涛;贾志成;张艳【作者单位】河北工业大学信息工程学院,天津300401;河北工业大学信息工程学院,天津300401;河北工业大学信息工程学院,天津300401【正文语种】中文【中图分类】TP272随着汽车工业和智能控制的发展,汽车空调应用已经相当普及,而人们对车内环境的要求也在逐步的提高。
PIC单片机的步进电机控制系统设计

论文题目:基于PIC单片机对步进电机控制系统学院:电子工程学院年级: 2010 专业:电子信息工程姓名:学号:指导教师:20010年月日摘要步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件,具有快速启动和停止的特点。
其驱动速度和指令脉冲能严格同步,能实现正反转和平滑速度调节,因而被广泛应用于数模转换,速度控制和位置控制系统。
但是步进电机的驱动信号往往还是由专门的模拟芯片控制器或者信号发生器产生,缺乏灵活性和可靠性。
尤其在一些智能化要求较高的场合,用模拟芯片及信号发生器来控制步进电机有一定的局限。
而利用单片机进行脉冲控制,控制精度高,外围电路也比较简单,因此在工业应用场合,基于单片机的步进电机控制器应用广泛。
本设计采用PIC系列单片机作为步进电机控制系统的核心,实现了软件与硬件相结合的控制方法。
用软件代替脉冲分配器,达到了对步进电机的最佳控制。
采用单极性驱动电路对小功率步进电机进行驱动,电路简单,实用性好。
用LCD 显示屏对步进电机的预设工作状态进行动态显示,直观、明了。
关键词步进电机;PIC单片机;LCDAbstractStepper motor is a control-driven component which directly convert digital signal to angular displacement or linear displacement, with a rapid start and stop characteristics.The driving velocity of the stepper motor are strictly synchronous with instructions pulse, and can achieve positive and negative rotation and smooth speed adjustment, so it is widely used in digital-to-analog converter, speed control and position control system.However, the driving signals of stepper motor are often generated by a special controller of analog chip or signal generator, it is lack of flexibility and reliability.Especially in some occasions of higher intelligence, using analog chips and signal generator to control the stepper motor has some limitations.Because of its single-chip high-precision pulse and relatively simple peripheral circuits, so stepper motor controllers based on single-chip are widely used in industrial applications.The design uses a PIC MCU as the core of stepper motor control system, and a control method of combination of software and hardware is realized.We choose software instead of the Pulse Distributor to achieve the best control of the stepper motor.Unipolar drive circuit is used for driving low-power stepper motor, which is simple and really functional.LCD is used for dynamic displaying intuitively and clearly the state of the stepper motor.KeywordsStepper motor;PIC Microcontroller;LCD目录摘要 (I)Abstract (II)绪论 (1)第一章控制系统实现原理 (2)一、步进电机的分类和主要性能指标 (2)(一)步进电机的分类 (2)(二)步进电机的主要性能指标 (2)二、步进电动机的结构及工作原理 (3)(一)反应式步进电动机的结构及工作原理 (3)(二)混合式步进电动机的结构及工作原理 (4)(三)KP39M2-025型混合式步进电动机的工作方式 (5)(四)步进电动机的加减速 (6)三、液晶显示模块OCMJ48C (7)(一)带有中文字库图形点阵液晶显示模块的应用 (7)(二)OCMJ48C液晶显示模块的功能 (8)四、PIC单片机 (8)(一)PIC系列单片机的特点 (8)(二)PIC16F877单片机的结构 (9)第二章控制系统硬件设计 (12)一、控制系统总体概述 (12)二、控制系统的硬件电路 (12)(一)控制系统总体电路 (12)(二)单片机与步进电机接口驱动电路 (14)(三)单片机与LCD显示屏接口电路(8位并行模式) (14)(四)单片机与键盘接口电路 (15)三、步进电动机的选型 (16)四、开发平台MPLAB ICD简介 (16)第三章控制系统软件设计 (18)一、控制系统总流程图 (18)二、系统监控模块 (19)(一)系统监控模块流程图 (19)(二)步进电机转向设置子程序范例 (20)(三)步进电机转速设置 (21)三、键盘识别处理模块 (21)四、LCD显示模块 (22)五、控制信号产生模块 (23)(一)步进脉冲产生模块 (23)(二)系统中断模块 (24)(三)步进电机加减速模块 (25)结论 (29)参考文献 (30)致谢 (31)绪论步进电机是机电控制中一种常用的执行机构。
基于PIC单片机方式汽车中控系统的设计任务书
题 目:基于PIC单片机方式汽车中控系统的设计
专业自动化
学生姓名曹义鸿
班级学号0113
指导教师张丽杰
指导教师职称高级工程师
指导单位
专业负责人
系工作领导小组
日期2020-11-25
毕业设计(论文)题目
基于PIC单片机方法汽车中控系统的设计
题目类型
工程设计应用
题目来源
生产
毕业设计(论文)内容与技术要求
2.课题来源:教学、科研、生产、实验、假拟、其他
0毕业论文内容
在指导老师的指导下选定具有一定理论意义和实用价值的课题,分析并解决问题,培养学生独立检索中外文资料的能力,初步具备搜集、整理、筛选信息资料的能力,初步掌握科学研究的基本方法,了解课题研究的程序、技巧与规范化要求,受到科学研究的初步训练。培养学生综合运用所学的知识与技能分析与解决问题的能力,并巩固和扩大学生的课堂知识。
1设计技术要求
掌握汽车行业的发展趋势和特征;毕业设计要求学生学会查阅、使用各种专业资料、网上资源,并以严肃认真、深入研究的工作作风完成论文任务;能够开展一定的英语阅读和翻译工作;具有一定的创新意识和能力,能够较为完整的完成子课题规定的任务;建立汽车的控制系统的模型,实现汽车控制单元的模块设计;实现总线的拓扑结构;完成舒适系统的设计;媒体娱乐系统的设计。
2012年5月中旬参加毕业设计答辩
参考资料
[1]《奥迪A6的自学手册》
[2]《电路》邱关源编著高等教育出版社2008年
[3]《电子技术基础》康华光编著高等教育出版社2006年
[4]《计算机组成原理》
其他的参考资料方向,具体书目可自定
注:1.课题类型:工程设计、技术开发、软件工程、理论研究和方式应用、治理模式设计等
基于PIC单片机的智能化逆变电源控制系统设计
基于PIC单片机的智能化逆变电源控制系统设计
一、具体电路设计
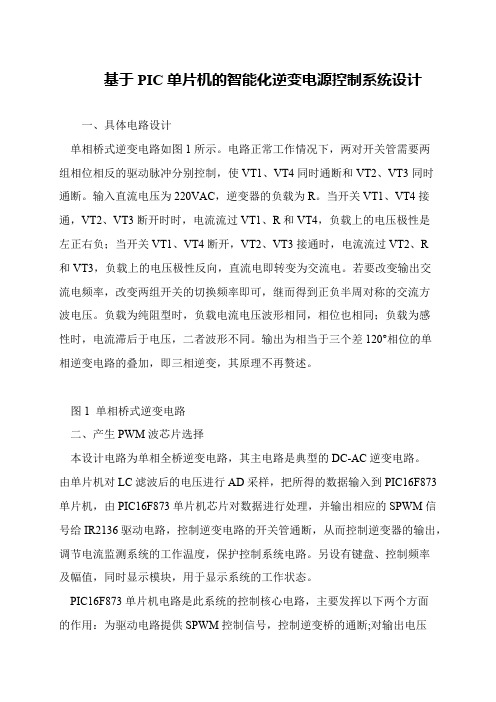
单相桥式逆变电路如图1所示。
电路正常工作情况下,两对开关管需要两
组相位相反的驱动脉冲分别控制,使VT1、VT4同时通断和VT2、VT3同时
通断。
输入直流电压为220VAC,逆变器的负载为R。
当开关VT1、VT4接通,VT2、VT3断开时时,电流流过VT1、R和VT4,负载上的电压极性是
左正右负;当开关VT1、VT4断开,VT2、VT3接通时,电流流过VT2、R
和VT3,负载上的电压极性反向,直流电即转变为交流电。
若要改变输出交
流电频率,改变两组开关的切换频率即可,继而得到正负半周对称的交流方
波电压。
负载为纯阻型时,负载电流电压波形相同,相位也相同;负载为感
性时,电流滞后于电压,二者波形不同。
输出为相当于三个差120°相位的单
相逆变电路的叠加,即三相逆变,其原理不再赘述。
图1 单相桥式逆变电路
二、产生PWM波芯片选择
本设计电路为单相全桥逆变电路,其主电路是典型的DC-AC逆变电路。
由单片机对LC滤波后的电压进行AD采样,把所得的数据输入到PIC16F873单片机,由PIC16F873单片机芯片对数据进行处理,并输出相应的SPWM信号给IR2136驱动电路,控制逆变电路的开关管通断,从而控制逆变器的输出,调节电流监测系统的工作温度,保护控制系统电路。
另设有键盘、控制频率
及幅值,同时显示模块,用于显示系统的工作状态。
PIC16F873单片机电路是此系统的控制核心电路,主要发挥以下两个方面
的作用:为驱动电路提供SPWM控制信号,控制逆变桥的通断;对输出电压。
基于PIC单片机分布式控制系统架构[实用新型专利]
![基于PIC单片机分布式控制系统架构[实用新型专利]](https://img.taocdn.com/s3/m/ef8fb68ff5335a8103d2208c.png)
专利名称:基于PIC单片机分布式控制系统架构专利类型:实用新型专利
发明人:包赟,白旭东,李荣正
申请号:CN201020174174.7
申请日:20100429
公开号:CN201654556U
公开日:
20101124
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种基于PIC单片机分布式控制系统架构,包括一台PIC单片机主机以及若干台PIC单片机从机,PIC单片机主机以及PIC单片机从机均具有端口RC0、RC1、SD0、SD1、SCK,所述每一PIC单片机从机的RC0、RC1端口分别与所述的PIC单片机主机的RC1、RC0端口相连,每一PIC单片机从机的SDI、SD0端口分别与PIC单片机主机的SD0、SDI端口相连,每一PIC单片机从机的SCK端口均与PIC单片机主机的SCK端口相连。
本实用新型基于PIC单片机SPI通信构建了一个分布式控制模式,结构简单,为实现单片机分布式控制模式和数据交换奠定了计数基础。
申请人:上海工程技术大学
地址:201620 上海市松江区龙腾路333号
国籍:CN
代理机构:上海兆丰知识产权代理事务所(有限合伙)
代理人:章蔚强
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PIC单片机的AGC控制系统设计研究
【摘要】本文对基于PIC单片机的AGC控制系统设计进行了分析和研究,采用该控制系统能够将实时闭环控制以及高速采集AGC现场信号的目标完成,同时还具有较高的可靠性、较好的抗干扰性以及成本低的特点。
该AGC系统控制装置的有效运用同时还可以促进设备改造的成本实现较大程度的降低。
【关键词】PIC单片机;AGC控制系统;设计研究
0.引言
目前我国在钢铁自动化方面取得较大成绩,但亦有很多钢铁企业因液压控制技术的提升而面临响应随度跟不上的困境。
采用PLC及高速闭环模块的自动化方式可达到要求,但其高成本、高维修费另很多企业望而却步,难以完成自动化控制的更新换代。
本文以16位的PIC单片机做主控制器,开发了一套板带轧机厚度控制(AGC)系统,具有运行速度快,编程灵活、实用性强、抗干扰强,成本低等特点。
1.AGC 系统整体结构
AGC 系统的基本结构是由轧制力补偿闭环、厚度监控、厚度预控以及液压缸位置闭环(APC)等共同构成的,而AGC 系统的核心部分就是其中的液压缸位置闭环。
下位机控制器在实际AGC系统中的主要功能是对现场传感器的数据进行采集,这项功能由相应的转换电路完成,并通过一些控制算法将轧件的具体出口厚度值计算出来,然后通过对伺服阀的驱动控制液压缸的运动来对其厚度进行调整[1]。
在轧机现场,与数据相关的硬件有:用于测量缸位移、导向辊速度的编码器、用于测量压强值的压力传感器、测厚仪、操作箱、指示灯、伺服阀、上位机等。
相对应的接口电路在AGC系统当中可以被分为五种,也就是编码器信号输入端口、控制量的输出端口(也就是模拟量输出端口)、模拟量输入接口、数字量信号的接口、通信接口。
2.PIC 单片机
作为一种对外围设备进行控制的微控制器,PIC单片机属于一种CPU,其具备了一定的分散作用。
由于自身具备的很多优点,如:精简指令集的技术、哈佛总线结构、两级流水线指令结构、寄存器采用RAM结构形式等,PIC系列单片机在医疗仪器、信号处理以及自动化设备当中得到了非常广泛的运用。
本文采用PIC24H系列的PIC24HJ256GP610芯片,共有100个引脚,256KB的闪存程序存储器,完全能够满足本系统性能需求[2]。
3.辅助芯片FPGA
为了使轧钢生产线的实际需求得到充分的满足,AGC系统在板带轧机当中需要具备较多的外围接口电路。
然而这样强大的数量资源在现有的处理芯片当中并不具备。
所以在对绝对值编码器以及增量式编码器的输入信号进行处理的时候,采用FPGA作为辅助芯片,利用FPGA作为辅助芯片不仅能够将单片机处理单元以及I/O 接口数节省下来,同时还具备更快的数据处理速度以及更强的可靠性等一系列优势。
现场可编程门阵列是FPGA的中文名字,属于一种能够进行编程的逻辑器件,在对其进行设计的时候,设计者可以以实际系统的要求作为依据,然后再利用对相应器件的编程从而保证逻辑功能的实现。
作为一种半定制的专用集成电路,其不仅将定制电路的不足克服了,同时还有效的解决了以往的可编程器件缺少足够的逻辑门数的缺陷。
FPGA具有非常高的集成度,而且体积相对来说比较小,同时其具备的数量庞大的内部资源可以使各种系统的需求得到充分的满足[3]。
4.模拟量接口电路硬件设计
在实际的工作过程中,AGC系统在进行厚度控制的时候需要对压力传感器的信号进行采集,并将其作为反馈量。
电流形式是压力传感器对模拟量进行输出的主要形式,所以不能够在AGC系统当中进行直接输入。
因此必须要将其转换成能够使工业满足的信号0~10V,再由并行12位的模数转换器MAX197转换为成数字量,MAX197需要5V工作电压,而本系统的单片机在数字输入引脚上的电压范围为-0.3V到5.6V,那么MAX197的输出与单片机可直接相连。
我们前面所提到的计算出来的辊缝值等为模拟量,用于驱动伺服阀来控制液压缸的抬高与降低,而单片机只能输出数字量,那么就需要将数字量转换为模拟量。
本系统采用数模转换器DAC7724,分辨率为12位,可实现4路模拟信号的同时转换。
转换后的模拟信号由四路运算放大器TL084进行放大从而控制伺服阀驱动。
经实验数据测量,MAX197及DAC7724测量准确度高,完全满足AGC系统对精度的要求。
5.数字量接口电路硬件
处于在强电设备形成的电磁环境中的轧钢现场,由于共地系统总线回流的状况可能由很多环节的干扰而发生,这样就会导致逻辑数据的变化,从而严重的影响到正常操作以及设备的安全性。
在对电路之间电气进行隔离的时候,利用光电隔离的方法能够保证抗干扰能力的有效提升。
在电隔离的情况下,光电隔离电路可以将光作为对信号进行传送的媒介,从而隔离输入以及输出信号,这样就对系统噪声起到了有效的抑制作用,从而将接地回路的干扰消除了,同时使数字信号的准确性得到了保证,在该系统中隔离元件是TLP521-4,作为一种具有四通道的光电耦合器,TLP521-4的输入输出隔离很高,同时还具备了补偿电压、电流
以及温度的作用[4]。
6.结语
基于PIC单片机的AGC控制系统具有实用性强、抗干扰性好以及成本低廉的特点,同时电压转换电路还具有转换精度高以及电路简单的特性,由于具有很高的可移植性,所以在其他的开发系统中也得到了广泛应用。
参考文献
[1]车海军,杨文蜻,杨景明,等.基于FPGA的AGc系统位置检测接口电路设计[J].电气应用,2012(24):32-35.
[2]XIASiqing,GAOHuaiAhighlineariytopeartionaltanseonduetanaeempifieusedonenveoptaeingpowe amplifie[J].ChineseJuonaofEeetonveiees,2012,35(5):530-534.
[3]胡永红.基于DPS的机载多功能采集系统设计与实现[J].计算机测量与控制,2009(12):25-7.
[4]梁廷魁.RS485串行通讯在自动生产线上的应用[J].数字技术与应用,2012(2):21-22.。