EMG纠编调试步骤
EMG纠偏CPC系统11111

EMG纠偏系统中圣板带EMG纠偏系统纠偏CPC系统手册第1页--共45页EMG纠偏系统中圣板带目录项目背景 (4)1.纠偏CPC系统 (4)1.1系统描述 (4)1.2功能原理 (5)2.工艺参数-电气设备 (6)3.带BMI2.11.X检测电路的感应式测量架(CAN-BUS通讯) (7)3.1通过CAN OPEN界面过程数据传输 (9)3.2接收器的测定刻度校正: (11)3.3发送器和接收器矫正任务的检查: (11)4.使用BMI2.11.X CANBUS-电路调节倾斜度 (11)4.1、检查传感器的监测 (12)4.2通过钢板测试样品进行检查 (13)4.3检查-线圈的矫正(发送器←→接收器) (13)4.4信号“M ESSEINRICHTUNG OK”(测量设备OK) (14)4.5信号“B ANDLAGE OK”(带钢位置OK) (15)5.操作及参数设置 (16)5.1调试检验 (16)5.2通过ECU01进行控制系统的参数设置 (16)5.3操作模式控制 (18)5.4主系统与EMG单体设备系统连接通过PROFIBUS实现/可选 (20)5.4.1SPC16控制系统MCU24.2 (20)5.4PROFIBUS用户地址设置 (22)5.5EMG传感器连接CAN OPEN (23)5.6CAN-BUS的终端连接 (24)5.7在CAN-BUS上的用户地址定义 (24)5.8手动速度选择 (24)5.9线性位移传感器KLW的(位置)调节 (25)5.9.1线性位移传感器零点位置调节 (26)5.9.2线性位移传感测量方向调节 (26)5.9.3线性位移传感器量程标定 (26)5.10对中模式 (27)第2页--共45页EMG纠偏系统中圣板带5.11自动模式-有位置反馈 (28)5.12通过电位计实现板带对中控制 (28)6.对于标准程序的故障处理: (29)7.附件 (32)7.1MCU24.PRM参数文件(基本的出厂设置) (32)7.2拨码开关DIL-SWITCHES的位置 (33)7.3参数表-通过ECU01键盘可以调出参数清单 (34)7.4测量值表 (36)7.5PROFIBUS-DP接口表 (39)8.典型故与处理 (42)8.1CPC2跑偏故障分析 (42)8.2CPC1准备好信号没有封点办法 (42)8.3炉子纠编报错 (45)第3页--共45页EMG纠偏系统中圣板带项目背景在带钢处理线上,带钢的跑偏可能由于不同的原因所产生,跑偏可能导致产品的损坏或生产设备的损坏。
EMG EPC调试手册

文件名: BH_SPCc0126_1_00_en
1/49
SPC compact
修改情况: 00 新版格式 + 安全措施
名字: Roet
日期: 16.09.08
© 2012 EMG Automation GmbH. 版权所有 本文档拷贝权归属 EMG Automation GmbH. 本文所涉及的技术信息禁止以任何形式拷 贝、传播或未经授权对外交流或用于竞争目的。
6/49
SPC compact
1.3
安全规程的违背
EMG Automation GmbH 对于违背本手册所描述的安全规程而造成的任何损失均不负责 任。 尤其适用于如下情况所造成的损失: • 使用不当或操作有误。 • 不遵守本手册中的安全要求。 • 维护或修理工作不按要求执行。 • 工作组件或工具选择有误。
安全
简介 总则 安全规程的违背 基本安全预防措施 地方性法规,官方指令和规程 应用范围 构造及目的 参照符号表 安全规程总述 技术状况介绍 安全防护装置的移除 具体安全规程 机械危险 电气危险 液压危险 责任和资质要求 授权人员/雇员资质 设备故障和损坏的告知责任 必要的防护服 禁止改造和 变更 维护责任
危险
电击致死 被高压电击 只允许受训人员在使用 ESD-防护措施的情况下接触电路部分。
1.7.3
液压危险
小心
轻度人身伤害 被油液喷射 在维护或者维修工作开始时必须确认液压系统已泄压。 • • • • 不要改变说明书和维护计划中所指定的泵的压力 密封的或者用其他方式封死的调节阀不要触动。 当对液压系统进行作业时(如:更换液压软管 ) ,需准备容器或者收集盘来收集滴下或 渗漏的油液。 被替换下来的液压油要注入适当的回收容器并依照环保条例进行处置。
EMG调试手册

二、执行器技术数据
不同系列的 DREHMO 电动执行器技术数据可以按照用户的要求打印出来给用户参考。 2.1 工作方式 DREHMO 控制执行器及调节执行器的两种 S2/S4 工作方式。
DMC/DiM 120 DMC/DiM 250
DMC/DiM 30 DMC/ DiM 59
DMC/DiM 500 DMC/DiM 60
2.2 防护形式 执行器的防护形式 IP 在执行器的铭牌上有标注。在常规配置情况下执行器是适合户外安装使用的,它能够
使用手册 第 4 页,共13页
完全防护外界粉尘的侵入,也可防护水的短时浸泡(防护等级 IP67,依照 DIN EN 60529/ IEC 529)。作为选项 也可提供防护等级为 IP68 的电动执行器。IP68 的防护标准可使执行机构在潜入水的情况下正常工作。 2.3 技术参数 供电电压 供电电流 供电频率 功率 绝缘等级 环境温度 电缆截面 按照说明书标示,单位 [V], ±10% 按照说明书标示,单位 [A] 按照说明书标示,单位 [Hz], ±3% 按照说明书标示,单位 [kW] II 按照 DIN EN 61010 -25°C 到 +70°C (DiM 系列) -25°C 到 +60°C (DiMR 系列) 最小 1.5mm2 , 适用电机功率最大到 1.6kW/400V(AC 3ph);最小 2.5mm2 适用于电机功率 最大到 8.5kW/400V (AC 3ph)对更大的电缆截面请询问。 普通的溶解保险丝或针对感应载荷(电机)的自动保护装置: 16A 用于最大到 1.6kW/400V (AC 3ph)电机测量功率。 25A 用于 1.6kW 到 8.5kW/400V (AC 3ph) 电机测量功率。 螺纹连接: 0,5 到最大 2,5 mm2 最大 230V AC 0,3 A, 30V DC 2 A (欧姆荷载) 超压范围 I ≤ 300 欧姆 <海拔 2000 米。 当 >海拔 2000 米时请咨询生产商。 因为在不同的环境温 度下对绝缘和负荷强度有不同的限制。 IP67,当使用相应的电缆导入端口且密封完好时。 也可选择 IP 68 防护等级。 在执行器内部污染度为 1 (IEC 664) 在执行器外部污染度为 2 (IEC 664) 最大 95% / 31°C 当执行器标称电压>500V 或者接触器电压>60V 时,必须将控制单元 的电势参照点 0V 同 PE 相连。在电控板上将 X9 PE 和 GND 端子短 接。 其它的技术参数请咨询办事处。 2.4 手动操作 (“手轮”) 手轮用于断电时手动调节驱动设备或阀门的位置。不需要对执行器进行从电动到手动的离合切换操作。 向右转动手轮导致驱动套的右转 (从执行器向阀门方向看)。 2.5 运输和仓储 对正确的执行器运输方式(通过吊车)在下图给出了示意。 图1: 通过吊车对执行器搬运 • • • • • • 不要将起重机械的绳索挂在手轮或电机螺栓上。 仓储在通风和干燥的房间。 安装在户外时应接上电源。 当存放在潮湿的环境时,应接通电源。 对地面的潮气进行防护(应将执行器仓储在货架或类似的撑起的支架上)。 裸露的金属表面涂上合适的防锈剂。
纠偏框架EMG操作手册

CPC操作手册目录1.CPC介绍2.常用按键介绍3.常用M值和P值介绍4.操作5.说明1.CPC系统简介:EMG设备主要用于生产线上带钢对中,测宽。
由纠偏辊,检测框架和运算机构组成,检测框架采集数据,反馈给运算机构,运算机构控制纠偏辊的液压阀台完成纠偏动作。
检测框架为下图:作用为检测带钢的偏移量下图为纠偏辊,安装在带固定销的固定底座上。
靠右图中的液压缸驱动其在固定底座上移动,通过右图中的传感器把移动距离传递给CPU。
纠偏辊纠偏辊的位置检测及执行机下图为CPC(或EPC)设备的CPU,其中常用的如下介绍:X4为与电脑连接接线处;S4,S3为设置地址按钮,S4为十位,S3为个位H3,H4,H5,H6为Profibus DP信息显示,如与PLC通讯正常则H6为绿灯,其余显示为通讯不正常。
具体查考下图:2.常用按键如下:此图为CPC(或EPC)操作面板显示屏中显示画面共两种参数:M为反馈值,P为设定值。
(我们只能修改设定值,即P值)(共14个M选项,39个P选项)。
右边青色区域为现场操作按钮,各按钮功能如下远程本地控制切换自动模式选择手动模式选择手动模式下移动纠偏辊左右移动对中模式选择左边蓝色区域参数设置按钮:显示屏共可显示两行,按“”可“M”和“P”切换;选到某一项后按“”和“”可选14个M或者39个P选项。
(按“”后可快速选择)。
组合键(按“”)是选到能更改参数(只有P值能修改)。
可查看本CPC或EPC中所装程序版本3.常用到的M和P值如下:M值:M001 (output final stage) 伺服阀输出速度(显示P017的值)M002和M003为杆式传感器最大值和最小值所代表的边部值(现场设置为9.00伏)M004 (act. position value cyl.)液压缸实际位置M005 为带钢实际位置。
P值:P001 (rel. profibus)是否执行远程指令(bit=1接收并执行远程指令,bit=0接收不执行远程指令,)P003 (scal transd)为缩放测量范围。
EMG-EVM系统调试步骤

EMG系统调试步骤一,系统组成:1, EVM2-CP...+SPC16...+2xLIC1075/01..+KLW300.012+SV1-10/...+HST...二,系统工作原理:本项目中的对中系统设备主要由EVM_1300 探测头、LIC高频发射光源、SPC16电控器、KLW线性位移传感器,HST10伺服阀台构成。
由EVM探测头连续地测量行进板带的位置变化,将板带的位置偏差信号输入到SPC16电控器,控制信号输出到伺服放大器;通过伺服阀驱动液压油缸带动开卷机左右移动,使板带侧向移动,以调整跑偏板带回到预定的中心线上,实现板带自动对中功能。
EVM光电式探测头采用了高频光源的光电探测传感器,不受周围光源的影响,由直流电机控制定位自动寻边。
高频交变光源具有故障监视功能,出现故障可以报警。
这种探测头的开口度可达4米,适合安装在开卷机处,要求开口度大,精度高的位置使用。
三,系统安装注意事项说明:(参考示意图)EVM探测装置安装时,沿机组中心对称(有中心标记“”);光源的有效光沿机组中心对称;探测头的运行轨迹和正对且与光源平行。
位移传感器安装在液压缸边上,有液压缸平行且中心重合。
四,系统调试方法和步骤:1,标定EVM测量单元在进行标定之前检查并设定拨码开关,S2(四位拨码开关,功能开关)S2.1=on,其余OFF;S3(四位拨码开关,通讯速率设定)S3.2=on,其余OF;S4(调试开关,正常工作是为0,用笔记本超级终端连线时,指F);S51,S50为通讯地址设定,为别为0和4;认识一下S6(reset按钮),S31,S32为左右手动移动测头。
电路板上有10个指示灯,H1(黄灯闪烁,1Hz)CPU工作;H2(绿灯常亮)电源正常;H3(绿灯常亮)马达正常;H4(此EVMS系统时,不亮为正常);H5(绿灯常亮)EVK正常;H6(绿灯亮时,测头在正常位,灭时,测头超限);H7(绿灯常亮)通讯控制电路正常;H8(绿灯常亮)通讯状态正常。
EMG调试及接线图

E M G调试及接线图 Prepared on 22 November 2020德国EMG电动执行机构调试步骤德国EMG电动执行怎么使用德国EMG电动执行步骤需要很好的注意。
德国EMG电动执行机构调试步骤:◆DREHMO(德国)(SFEUANFRIEBE/ACFUATORS)执行器调试操作步骤◆按功能键,显示出主菜单,在主菜单中按↑、↓键选择LearnMode(学习方式)菜单,按功能键进入菜单。
◆选择Parameters(方向),在众菜单中选择Valve(阀门),在Valve(阀门)中选择菜单ClosingDirection(设定方向)◆在ClosingDirection中根据阀门类型选择CouterlowiseOpen(逆时针开)或ClowiseOpen(顺时针开)开方向。
◆继续选择Valve(阀门)菜单中的FinalPositionLinmitSw(最终位置设定)菜单,在此菜单中选择适合阀门跳断的类型。
◆按设置键进入Local,Learnmoba连续按↓键选择◆按Esc键退出至LearnMode(学习模式)菜单下●连续按↓进入Changefinolpositions(改变阀门位置)●按确认键进入Clearpositionclose(显示位置关)●连续按↓进入Setpositionclose(预备关设定)●按确认键进入sitionclose0%===========100%●然后按↓↑键操作阀门要求关的实际位置,当阀门实际动作位置符合要求时,按确认键。
●Oper操作步骤同上。
●按Esc键退出至主菜单,选择Local(就地)或Remote(远控)模式,设定完成。
◆接线图如下:●X2端子排:PE2(U相)、4(V相)、6(W相)●X1端子排:20与17短接、21与16短接●X1端子排:5(COM)、6(开到位)、7(关到位)●X1端子排:13(COM)、14(故障常闭)、15(故障常开)根据情况设定。
EMG调试步骤

EMG调试步骤一、Standard(不带控制箱)和Matic (接触式传感器)系列调试1手动操作我们一般标准运行方向为顺时针为阀关,逆时针为阀开。
手轮用于断电时手动调节驱动设备或阀门的位置。
不需要对执行器进行从电动到手动的离合切换操作。
向顺时针转动手轮驱使驱动套的顺时针方向转动 (从执行器向阀门方向看)。
1.2机械组件1.2.1限位开关装置限位开关装置由限位开关WRl和WL2(单断路开关)组成.它被设计成辊式计数装置.计数范围2到1450转/行程。
1.3.1传动方向的检查检查执行器的输出方向须从阀门的任一中间位置进行,如果确定转动方向不正确,应立即关机,并变换方向(针对带有matic控制模块的执行器需要重新设置S3.8)。
对DREHMO执行器作两个方向的运行,用手动操作限位开关和力矩开关的跳闸杠杆动作。
如电机不停,则检查控制器的连接及控制器本身。
电机或阀切勿过载运行,特别是大电机(额定电流的80%),由此可导致阀或执行器损伤。
始终要保证限位开关和力矩开关的正常工作是置关重要的。
1.3.2力矩开关及调整两个力矩开关DRl(关)和DL2(开),或DRl1和DL21作为串联式开关可分别由可调的凸轮(2)或(5)动作,凸轮的转动角给出了一个相应的输出力矩的量值调整:力矩一开始一般调整到最小值,力矩可在标牌上所给定的范围内力矩开关上的力矩刻度做无级改变,其形式如下:关方向力矩1、松动螺钉(1)2、朝箭头(3)方向转动开关凸轮(2),并调整在所需的力矩上3、拧紧螺钉(1)开方向力矩1、松动螺钉(4)2、朝箭头(3)方向转动开关凸轮(5),并调整在所需的力矩上3、拧紧螺钉(4)不允许力矩调整至超过给定的最大值1.3.3限位开关及调整两个可独立调整的限位开关WRl和WL2(单断路开关)或WRll和WL21(串联开关,作为选择),可通过改变其开关状态来显示达到预调的机械终位。
计数器上限位开关的调整限位开关WRl用于调整关方向,限位开关WL 2用于调整开方向,它们是固定不变的,串联开关WRll和WL2l也同理。
EMG调试步骤

一,基本操作:
绿色区域:操作功能键
远程、本地切换,灯亮为远程,否则为本地。
自动模式,灯亮即表示已选择自动模式,此模式下,纠偏装置自动纠正带钢
手动模式,灯亮即表示已选择手动模式,此模式下,可以按来控制纠偏装置动作。
对中模式,灯亮即表示已选择对中模式,此模式下,纠偏装置回到机械零位。
蓝色区域:调试功能键
增加数值,包括参数号及参数值
减小数值,包括参数号及参数值
确认键
退出键
改变参数类型
改变参数行
二,如何修改参数
1,显示M参数,即只读参数。
2,修改P参数,即可修改的参数
结果:
三,调试过程:
1,检查确认接线是否正确。
其中位移传感器为滑动变阻器,总阻值5000欧姆。
2,选着手动模式,试验纠偏是否动作,动作方向是否正确,一般是液压缸伸出,
液压缸缩回。
方向不正确,可以修改参数P002。
3,把纠偏装置打到中间位,即安全销能插入的位置,调整位移传感器的位置,使其测量值大概为零。
4,液压缸完全伸出,测出其总长。
把P005的值改成实际值。
这里是240MM。
5,让液压缸完全伸出和缩回,并分别记录位移传感器的值,调整P003的值,使这两个值的和为240mm。
即与液压缸的长度一致。
6,调整P004的值,使液压缸完全伸出或缩回时的绝对值相等。
7,打开线圈的控制器,并观察M002和M003的值,首先旋转电位器R2使M002和M003相等,然后旋转R1,使两个值都是9.00V。
8,打到手动模式,用一块钢板试验纠偏是否动作,动作方向是否正确。
P018可以修改动作方向。
最新EMG电动执行器调试及常见故障处理

六、执行器的故障点及其相应的处理方法:
1.组合传感器故障:力矩保护失效
首先短接线MD-NORM(操作板上)——电位器的开、关量程调至0﹪——按开关S5按下不放,同时将S1拨至LEARN位等调试灯闪烁——松开S5——再长按S5、同时将S3、S4按下保持5秒——将短接线去掉,把电位器调至50﹪(或者其他所需要的适合位置)
原因
1:执行器主板上接触器的主电源进线接线不当
处理:只需将其电源进线端三根线中的任意两根对调后及可排除故障
原因
2:执行器在出差调试时设置的开、关电气行程限位位置过小所致
处理:将执行器之前的出厂调试行程限位设置清掉后重新设定所需要的位置
5.执行器只能进行短时开、关电气行程,此时中间的红色指示灯就报警常亮。
按上述第一步进入现场调试状态后,若之前设置的电气行程限位位置开位或者关位没有到达用户现在所需要的位置相应的位置指示灯就常亮的话,那么只需将其之前的电气行程限位位置删除掉,重新进行设置用户所需的位置。(删除之前电气行程限位位置的步骤:进行调试状态后,执行器运行到之前的电气行程限位位置后相对应的指示灯常亮,此时需先LT按钮同时把S2拨向和运行方向一致的位置,此时该方向指示灯由常亮又变成闪烁则表示原来设定的行程限位位置已取消,然后可继续进行新的电气行程限位位置的设定)。设定完后,必须检查电气行程限位位置并判断是否需要重新调整。即将阀门从一个电气行程限位完整地运行到另一个电气行程限位。如果是角行程执行器,必须确认当执行器在电动操作到电气行程限位时,应没有到达机械限位调整螺
2)电气行程限位的设置(当执行器进入调试状态后):
①设定关方向电气行程限位
把S2拨到CLOSE位置——至执行器电动运行到全关位置——把S2拨回到STOP位置——按下LT并保持——把S2拨到CLOSE位置——此时全关位置灯由闪烁变成常亮——说明全关方向的电气行程限位位置已设定完毕——把S2拨回STOP位置——松开LT按钮
EMG操作手册
CPC操作手册目录1.CPC介绍2.常用按键介绍3.常用M值和P值介绍4.操作5.说明1.CPC系统简介:EMG设备主要用于生产线上带钢对中,测宽。
由纠偏辊,检测框架和运算机构组成,检测框架采集数据,反馈给运算机构,运算机构控制纠偏辊的液压阀台完成纠偏动作。
检测框架为下图:作用为检测带钢的偏移量下图为纠偏辊,安装在带固定销的固定底座上。
靠右图中的液压缸驱动其在固定底座上移动,通过右图中的传感器把移动距离传递给CPU。
纠偏辊纠偏辊的位置检测及执行机下图为CPC(或EPC)设备的CPU,其中常用的如下介绍:X4为与电脑连接接线处;S4,S3为设置地址按钮,S4为十位,S3为个位H3,H4,H5,H6为Profibus DP信息显示,如与PLC通讯正常则H6为绿灯,其余显示为通讯不正常。
2.常用按键如下:此图为CPC(或EPC)操作面板显示屏中显示画面共两种参数:M为反馈值,P为设定值。
(我们只能修改设定值,即P值)(共14个M选项,39个P选项)。
右边青色区域为现场操作按钮,各按钮功能如下远程本地控制切换自动模式选择手动模式选择手动模式下移动纠偏辊左右移动对中模式选择左边蓝色区域参数设置按钮:显示屏共可显示两行,按“”可“M”和“P”切换;选到某一项后按“”和“”可选14个M或者39个P选项。
(按“”后可快速选择)。
组合键(按“”)是选到能更改参数(只有P值能修改)。
可查看本CPC或EPC中所装程序版本3.常用到的M和P值如下:M值:M001 (output final stage) 伺服阀输出速度(显示P017的值)M002和M003为杆式传感器最大值和最小值所代表的边部值(现场设置为9.00伏)M004 (act. position value cyl.)液压缸实际位置M005 为带钢实际位置。
P值:P001 (rel. profibus)是否执行远程指令(bit=1接收并执行远程指令,bit=0接收不执行远程指令,)P003 (scal transd)为缩放测量范围。
EMGEPC调试操作手册

EMGDES-00004495-SPCc0126-CN-1.doc 操作手册
3/49
错误!未定义书签。
错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。
错误!未定义书签。 错误!未定义书签。 错误!未定义书签。
错误!未定义书签。
45 45 错误!未定义书签。 错误!未定义书签。
错误!未定义书签。
错误!未定义书签。 错误!未定义书签。
错误!未定义书签。
错误!未定义书签。
错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。 错误!未定义书签。
文件名: BH_SPCc0126_1_00_en
SPC compact
授权人员/雇员资质 设备故障和损坏的告知责任 必要的防护服 禁止改造和 变更 维护责任
系统的简要描述
应用 控制器 SPCc
工作模式
调试
事故预防的信息 安装 连接条件 CCD 摄像头 CCDpro 5000 测量系统的安装 线性位置传感器 KLW 的安装 电气设备的安装 液压控制系统和伺服阀的安装
文件号.: 名称:
技术修订目录
文件号.: 名称:
EMGDES-00004495-SPCc0126-CN-1.doc 操作手册
2/49
EMG电动执行器调试步骤
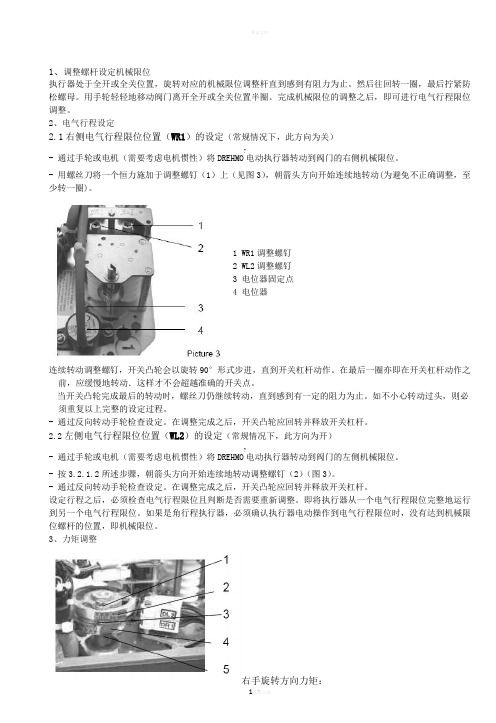
1、调整螺杆设定机械限位执行器处于全开或全关位置,旋转对应的机械限位调整杆直到感到有阻力为止。
然后往回转一圈,最后拧紧防松螺母。
用手轮轻轻地移动阀门离开全开或全关位置半圈。
完成机械限位的调整之后,即可进行电气行程限位调整。
2、电气行程设定2.1右侧电气行程限位位置(WR1)的设定(常规情况下,此方向为关)- 通过手轮或电机(需要考虑电机惯性)将DREHMO?电动执行器转动到阀门的右侧机械限位。
- 用螺丝刀将一个恒力施加于调整螺钉(1)上(见图3),朝箭头方向开始连续地转动(为避免不正确调整,至少转一圈)。
1 WR1调整螺钉2 WL2调整螺钉3 电位器固定点4 电位器连续转动调整螺钉,开关凸轮会以旋转90°形式步进,直到开关杠杆动作。
在最后一圈亦即在开关杠杆动作之前,应缓慢地转动.这样才不会超越准确的开关点。
当开关凸轮完成最后的转动时,螺丝刀仍继续转动,直到感到有一定的阻力为止。
如不小心转动过头,则必须重复以上完整的设定过程。
- 通过反向转动手轮检查设定。
在调整完成之后,开关凸轮应回转并释放开关杠杆。
2.2左侧电气行程限位位置(WL2)的设定(常规情况下,此方向为开)- 通过手轮或电机(需要考虑电机惯性)将DREHMO?电动执行器转动到阀门的左侧机械限位。
- 按3.2.1.2所述步骤,朝箭头方向开始连续地转动调整螺钉(2)(图3)。
- 通过反向转动手轮检查设定。
在调整完成之后,开关凸轮应回转并释放开关杠杆。
设定行程之后,必须检查电气行程限位且判断是否需要重新调整。
即将执行器从一个电气行程限位完整地运行到另一个电气行程限位。
如果是角行程执行器,必须确认执行器电动操作到电气行程限位时,没有达到机械限位螺杆的位置,即机械限位。
3、力矩调整右手旋转方向力矩:- 松开螺钉(5)- 朝箭头(3)方向转动开关凸轮(4),并调整到所需的力矩值上- 拧紧螺钉(5)左手旋转方向力矩:- 松开螺钉(1)- 朝箭头(3)方向转动开关凸轮(2),并调整到所需的力矩值上- 拧紧螺钉(1)4、带开OPEN,停STOP和关CLOSE按钮的就地控制单元4.1进入调试状态要退出调试状态,只需将选择开关S1拨离LEARN位置即可。
EMG纠编调试步骤

EMG纠编调试步骤EMG(Electromyography,肌电图)是测量肌肉活动的一种技术方法,用于诊断和评估神经肌肉疾病。
纠编调试是EMG设备的必要过程,确保其正常运行和准确测量。
以下是EMG纠编调试的步骤:1.设备检查:检查EMG设备的外观和连接线,确保所有线缆都连接牢固并没有损坏。
检查电极的状态,确保它们清洁、完整,并连接到适当的位置。
2.验证电信号放大器:通过检查信号放大器来验证其正常工作。
将一个已知而稳定的电压值应用到放大器输入,确认放大器输出的电压值是否符合预期。
如果有任何问题,需要修复或更换设备。
3.检查基线噪音:在没有电极接触皮肤的情况下,确认放大器是否产生噪音。
噪音通常表示接地问题或设备故障。
如果噪音较大,需要检查和修复可能的故障。
4.校准电压测量:使用已知电压源校准电压测量功能。
将电压源按照设定的电压值连接到EMG设备,确保测量到的电压值与设定值一致。
5.确认电极正确放置:根据需要的测量位置和目的,正确放置电极。
根据不同的测量类型(肌电图或神经电图),电极的位置和接地方式可能会发生变化。
确保电极与皮肤接触良好,没有杂散噪音。
6.检查肌肉活动:让被测者做一些简单的肌肉收缩动作,观察EMG设备是否能准确地测量到肌肉的活动。
检查信号的幅度和波形,确保其与肌肉活动相符。
7.测试信号的频率响应:使用已知频率和幅度的信号源,测试EMG设备对不同频率的信号的响应情况。
确认设备在不同频段的信号上是否能准确测量,并且没有出现衰减或畸变。
8.调校增益和滤波器:根据需要调节放大器的增益,并选择合适的滤波器设置。
增益需要根据被测者的肌肉活动强度调整,以保证信号的幅度在合适的范围内。
滤波器设置可以根据测量目的和被测信号的频率特性来进行调整。
10.清洁和维护设备:定期清洁和维护EMG设备,以确保其正常运行和长期使用。
清洁电极和连接线,更换损坏的部件,保持设备的整洁和良好状态。
EMG纠编调试步骤

EMG纠编调试张凯顺义冷轧所用的纠编均是EMG公司的,型号有BMI2—CP / BMIH—CP.其中BMIH—CP是高精度的纠偏系统,有6#,8#纠偏,其他的纠偏均为BMI2—CP。
这8套纠偏的CPU均为MUC24。
EMG的纠偏系统分为以下几部分:EMG控制柜,检测框(放大器一般在检测框,但也有一些没有和检测框成为一体,如8#),纠偏装置.一、EMG控制柜的面板如图所示:其中屏幕可以显示2条命令,其中PXXX为可设定或可修改的命令,而MXXX为反馈命令,传感器所测量的一些数据,上位机下达的命令以及目前纠偏状态。
PXXX有30条命令,MXXX有12条.在蓝色区域“F”与“M”为功能键,单独无法使用,只有和其他键组合才用;“ESC”为退出键,“EMTER"为输入键;为不仅是方向键,而且可以调节数值大小,可以选择上下两条命令,可以选择P或都M命令。
在绿色区域“EXTERN”是本地控制和远程控制切换按钮;是自动控制按钮;是手动控制按钮;是对中按钮;、是纠偏左右移动按钮。
“READY”灯可以指示EMG工作是否正常。
二、常用指令介绍及组合键1常用指令P001 REL. PROFIBUS DP网通信命令。
Bit 0为禁止,Bit 1为通信.P003 SCAL TRANSD. 纠偏移动值的标定值P004 ZERO POS。
TRANSD 零点位置设置(—200mm~200mm)P005 STROKE CYLINDER 纠偏实际移动范围P015 OFFSET CENTRE 中心偏移位置(-200m~200mm)P016 GAIN CENTRE 对中增益P017 GAIN AUTO 自动控制增益P018 DIR AUTO 自动控制纠偏移动方向设置P023 DIR SV 手动移动纠偏方向设置M002 EDGE POS。
1 1#接收线圈电压M003 EDGE POS.2 2#接收线圈电压M004 CYL。
POS。
EMG纠编调试步骤
EMG纠编调试步骤EMG是一种常用的生物信号检测技术,用于记录和分析肌肉电活动。
在进行EMG信号的纠编和调试过程中,可以按照以下步骤进行操作:1.EMG设备准备:a.检查EMG设备是否正常工作,包括仪器电源、电极电容、电缆连接等。
b.检查被测试者是否有任何禁忌症(如皮肤破损)或敏感性(如对胶水过敏)。
2.电极选择和准备:a.选择合适的电极,一般为表面粘贴电极,也可以根据需要选择针电极。
b.清洁被测试区域,去除皮肤上的油脂和污垢,以确保电极与皮肤良好接触。
c.对粘贴电极,可以先在电极底部涂抹导电胶以提高接触质量。
3.电极放置:a.根据需要和研究目的选择适当的电极放置位置。
常用的放置位置包括肌肉腹部、肌腱、肌肉纤维方向等。
b.粘贴电极时,将电极贴在被测试区域上,确保电极与肌肉贴合紧密,同时不影响被测试者的舒适度。
4.信号采集设置:a.打开EMG设备,并进行信号采集设置,包括采样率、增益、滤波器设置等。
根据研究需要选择合适的参数设置。
b.进行基线校准,即测试者放松肌肉,记录下安静状态下的背景信号水平。
5.信号采集和记录:a.开始EMG信号采集,并记录被测试人的运动状态。
测试者可以在安静状态下或在进行特定肌肉活动时进行信号记录。
b.监测信号质量,确保信号的稳定性和准确性。
如有必要,可以对信号进行实时滤波和调整。
6.数据处理:a.对采集到的EMG信号进行数据处理。
常见的数据处理方法包括时域分析、频域分析、时频域分析等。
b.进行信号滤波,以去除噪声和干扰。
常用的滤波器包括低通滤波器、高通滤波器等。
7.数据分析:a.根据研究目的和信号特征,进行数据分析和解释。
可以计算平均值、峰值、功率谱密度等指标来描述信号特征。
b.进行统计分析,比较不同实验条件下的信号差异。
可以使用方差分析、T检验等方法进行统计检验。
8.结果解释:a.根据数据分析结果,进行结果解释和讨论。
确定信号特征、影响因素和可能的应用领域等。
b.编写实验报告或论文,总结实验设计、方法、结果和结论等,以便分享和交流研究成果。
EMG纠偏系统下载程序步骤
EMG纠偏系统下载程序及参数步骤一、制作串口连接电缆,使用两个female RS-232插头,按下列顺序制作。
2——————33——————25——————5连接MCU24.2的X1与PC机串口二、程序下载1.双击工具软件“MCU24_Tools_Eng”2.弹出快捷操作界面3.选择“settings”→“Baudrate”→“19200”(若直接连接PC与串口可跳过3,4两步,若通过串口转接卡连接,请执行3,4两步)4.选择“COM Port”→实际使用的串口号5.选择“Program”→“Download (Program→Mcu24)”6.点击弹出警告窗口的“确定”7.选择“Browse”8.在硬盘中找到需要下载的程序,双击程序文件9.双击“EMG-Controller.L2C”10.双击“MCU24.l2r”11.双击“public”12.双击“CCODE”13.双击“MBRT”14.双击“EMG”15.双击“MCU24”16.双击选择“MCU24.H86”文件17.完成路径选择后点击“OK”18.根据提示选择合适的插针(万用表笔即可),插入MCU24.2的S2插孔。
19.插入S2后,点击“确定”20.等待程序下载21.等待下端蓝色进度条走到终点后,会提示下载完成,点击“确定”。
拔出S2内的插针,等待10秒钟后,将插针插入S1中,1秒钟后拔出,MCU24.2会自动重启,程序下载完成。
三、上传下载参数1.双击工具软件“MCU24_Tools_Eng”2.弹出快捷操作界面3.选择“settings”→“Baudrate”→“19200”(若直接连接PC与串口可跳过3,4两步,若通过串口转接卡连接,请执行3,4两步)4.选择“COM Port”→实际使用的串口号5.选择“Parmeters”→“Upload (Param→Mcu24)”或者“Download(Mcu24→Param)”进行参数的上传和下载6.点击弹出警告窗口的“确定”7. 选择“Browse”8.在硬盘中找到需要下载的程序,双击程序文件9.双击“EMG-Controller.L2C”10.双击“MCU24.l2r”12.双击“CCODE”14.双击“EMG”16.双击选择“MCU24.H86”文件17.完成路径选择后点击“OK”18.参数上传(下载)完毕后会提示成功19.点击“确定”后,完成操作。
纠偏安装调试说明
安装调试注意事项及步骤:
1、控制盒外壳、电眼外壳要接地线,该地线截面达到4平方mm;
2、马达安装要水平且转子部分和螺杆部分的直线度要好,马达线接线要用屏蔽线且与高压线分开走,以免被干扰;
3、电源电压要稳定,达到24V,如果机器开动后这个电压出现降低的话,则纠偏器要使用独立的24V电源供电,以确保稳定新,因为电压不够会减小马达的推力从而使被卡住,推不动机台;
4、近接开关安装在机台滑动的中心,且要靠近感应铁块,该铁块的长度要达到超过马达行程的一半,铁片的边缘也要安装在中心位置,近接开关线要跟高压线分开不然容易被干扰;
5、初始化之前先达到对中模式;
6、先开锁3—42,然后改参数25、34、35、36、48、50、51、5
7、62、63,这些参数要在初始化之前调整好,不同的马达这几个参数的设定值是不一样的,可以通过马达上标签查型号和料号从而确定这几个参数值;
7、执行3—10初始化,完成后看看电路板上的LED灯是否有错误报警,然后调整26、27(正负行程)、30、31、32参数;
8、然后测试手动、自动、归中各种模式的动作是否正常。
带组合传感器的EMG电动执行器调试方法

带组合传感器的EMG电动执行器调试方法带组合传感器的EMG电动执行器调试方法1.接线:380V线接在X2的4、5、6端子.接地线接在端子边上.信号线接在X1上,2接停(不接)、3接关、4接开,1-21短接(内供电方式的负端),20为+24V内供电的共用端.2.S1-S3开关位置说明:S1---1(信号自保持)、3(力矩关)、4、5放ON,其余放OFF.S2---1(组合传感器)放ON,其余放OFF。
S3---1-8均放OFF.3.调试前准备:为了方便调试时安全的电动操作阀门,将S1-3先放OFF(行程关),同时将开/关力矩电位器设定在40%左右.4.调试:a.删除原设定:按下LT按纽并保持,然后将执行器外壳上的旋转开关S1旋至LEARN(调试位置),约30秒后,二个就地位置灯熄灭.b.进入调试状态:按下LT按纽并保持,然后将S1旋至LEARN(调试位置),约10秒后二个就地位置灯开始闪烁(表示进入调试状态),此时松开LT按纽.c.调关位:用手轮或执行器外壳上的旋转开关S2,将阀门运行到全关,然后S2放回STOP,手轮带上力后向开位转1-2圈,按下LT,然后将S2从STOP(停)旋至CLOSE(关),此时关指示灯由闪烁变为常亮(表示行程关位已设定),把S2旋至STOP,松开LT.d.调开位:用手轮或执行器外壳上的旋转开关S2,将阀门运行到全开,然后S2放回STOP,手轮带上力后向关位转1-2圈,按下LT,然后将S2从STOP(停)旋至OPEN(开),此时开指示灯由闪烁变为常亮(表示行程开位已设定),把S2旋至STOP,松开LT.e.检查开/关位置设定:设定好的行程开/关位置,可在调试状态下检查,方法是操作S2进行开关动作,当阀门运行到全开/关位置时,相应的开/关指示灯会常亮,而当阀门处在中间行程时,开/关指示灯闪烁.f.退出调试状态:任何情况下将S1离开LEARN(调试位置),则退出调试状态.g.设定关方式:将S1-3放ON(力矩关).h.设定开/关力矩值:组合传感器上的二个电位器,分别用于设定开/关力矩值,上部为关力矩设定电位器,下部为开力矩设定电位器,具体数值为执行器可输出最大力矩的百分比(参照电位器上的表格),关力矩值设定参照工厂要求,开力矩值约为关的1.1倍.5.试运行:将S1放在LOCAL位置(就地操作), 操作S2进行开关动作,当阀门运行到全开/关位置时,相对应的开/关指示灯会亮,而当阀门处在中间行程时,开/关指示灯应不亮.。
EMG电动门调试方法

EMG电动门调试方法1,首先删除出先前设定的限位,方法如下:先按下Learn (LT)按扭,在把S1拨扭开关移至Learn位置。
大约过十秒就地指示灯(开、关两只指示灯)开始闪亮。
这表示执行前一进入调试状态。
大约在过20秒两指示灯熄灭,这表示正在删除先前设定限位。
大约在过35秒,便可松开Learn (LT)按扭,两指示灯回重新闪亮,此时先前设定已被删除,并且此时执行器进入了Learn (调试)状态。
2,行程开、关设定,方法如下:A,设定关限位:把S2拨到CLOSE,执行器电动到全关位置。
(注:执行器随时可以通过把S2拨到STOP位置使其停止)然后,把S2按扭拨回STOP位置,在按下Learn 功能键同时,再次把S2拨到CLOSE位置,此时CLOSE由闪烁变常亮。
说明关限位行程已设置完毕。
B,设定开限位:把S2拨到OPEN,执行器电动到全关位置。
(注:执行器随时可以通过把S2拨到STOP位置使其停止)然后,把S2按扭拨回STOP位置,在按下Learn 功能键同时,再次把S2拨到OPEN位置,此时OPEN由闪烁变常亮。
说明开限位行程已设置完毕。
注:1)当执行器离开设定终端位置时,开关指示灯又会闪烁。
只有两个终端位置都设置完毕,并退出Learn状态。
指示灯才能在两个终端位置正常指示。
2)在设定某一终端行程限位时,当故障报警灯(红灯)长亮时,说明已超出机械限位极限或超出执行器力矩范围。
此时执行器回调,直到故障灯熄灭。
3)当执行器的两个终端位置设定完毕后需更改某一限位设置时,可以按上述调试方法,只需重新设置需要更改的某一限位即可,无需对两个限位同时进行设置。
4)调试之前把S1.4,S1.5拨到OFF,S2.7拨到ON。
3,力矩设定,方法如下:若在调试过程之中在开的过程之中,出现报警灯(红灯)长亮时,如果不是挡板内部卡住,此时便需把力矩改大(注:最大不能超过95%)。
可通过对组合传感器中的R9,R10进行调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EMG纠编调试
张凯
顺义冷轧所用的纠编均是EMG公司的,型号有BMI2-CP / BMIH-CP。
其中BMIH-CP 是高精度的纠偏系统,有6#,8#纠偏,其他的纠偏均为BMI2-CP。
这8套纠偏的CPU均为MUC24。
EMG的纠偏系统分为以下几部分:EMG控制柜,检测框(放大器一般在检测框,但也有一些没有和检测框成为一体,如8#),纠偏装置。
一、EMG控制柜的面板如图所示:
其中屏幕可以显示2条命令,其中PXXX为可设定或可修改的命令,而MXXX为反馈命令,传感器所测量的一些数据,上位机下达的命令以及目前纠偏状态。
PXXX有30条命令,MXXX 有12条。
在蓝色区域“F”与“M”为功能键,单独无法使用,只有和其他键组合才用;“ESC”为退
出键,“EMTER”为输入键;为不仅是方向键,而且
可以调节数值大小,可以选择上下两条命令,可以选择P或都M命令。
在绿色区域“EXTERN”是本地控制和远程控制切换按钮;是自动控制按钮;
是手动控制按钮;是对中按钮;、是纠偏左右移动按钮。
“READY”灯可以指示EMG工作是否正常。
二、常用指令介绍及组合键
1常用指令
P001 REL. PROFIBUS DP网通信命令。
Bit 0为禁止,Bit 1为通信。
P003 SCAL TRANSD. 纠偏移动值的标定值
P004 ZERO POS.TRANSD 零点位置设置(-200mm~200mm)
P005 STROKE CYLINDER 纠偏实际移动范围
P015 OFFSET CENTRE 中心偏移位置(-200m~200mm)
P016 GAIN CENTRE 对中增益
P017 GAIN AUTO 自动控制增益
P018 DIR AUTO 自动控制纠偏移动方向设置
P023 DIR SV 手动移动纠偏方向设置
M002 EDGE POS.1 1#接收线圈电压
M003 EDGE POS.2 2#接收线圈电压
M004 CYL.POS. SCALED 纠偏移动位置
M011 STATUS SENSOR 传感器状态
2.组合键
为输入P指令中的参数
为快速输入P、M指令编号
为回到EMG纠偏信息
三、调试步骤
1.先打开EMG控制箱先检查电源线,在确认电源电压为AC220V时,再检查直线传感器的接线,因为直线传感器是高精度的滑动变阻器,接线方式是分压式,一旦接错后通电很容易烧坏。
需要先将接线端子上的线拆下来,一般为21,22,23(或者是20,21,22),用电表测量21,23的电阻为5K欧姆。
24,25为伺服阀接线,其电阻为40欧姆。
打开检测框的放大器盖,检查220V电压接线是否正确。
确认正确后,将两个开关合上。
MUC24是没有专门的电源开关的,它的电源插头在其下方,电压为AC220V。
2.在通电以后,EMG面板上的屏幕即显示。
先将“EXTERN”打到本地(灯熄灭即是),
选择手动档(灯亮即是),在屏幕中选出M004,用过使纠偏移动,一般定义为液压缸伸出方向,如果方向错误则可以修改P023来使方向变的正确。
将液
压缸伸到最长,用盒尺测量其长度,比如为350mm(大约值)。
此时将另一条指令选择为P003,一般为360mm。
左右移动纠偏到最大,其绝对值之和应为350mm,但实际一般比350mm要小,故要修改P003要往大输入,左右移动至最大其绝对值之和约为350mm。
理论上纠偏左右移动位置应是相等的,为175mm,但实际中不一定相等。
设定P004,左右移动纠偏,以纠偏机架上的对中销轻松插入对中孔依据,即当M004显示为0时,对对中销可以轻松插入对中孔,此时P004设定正确。
3.用电脑连接放大器的COM口来调节两个线圈电压,要求检测框在没有带钢的情况下,电压为9000mV,也可以能过M002和M003来观察线圈电压。
在此讲用电脑观察电压的方法。
连接电脑后,“开始—附件—通讯—超级终端”,跟据提示进入介面选择3之后就可以看到参数,而且两个线圈的电压即为RECEIVE1,RECEIVE2。
如果此时电压差9000mV较大,则选调节S1使其接近9V,之后再调节R1,R1会使RECEIVE1,2同时增大,这时只需注将1调节到9000mV(尽量接近9000mV),再调节R2使RECEIVE2达到9000mV,R1,R2顺时针调节为+。
调节完后安装好放大器的盖板。
4.先打到,再档,在检测框一边放一块金属板(注意检测框上的标志)看纠偏是否向正确方向移动即金属板的反方向,如果方向不正确,则可以通过修改P018来使的纠偏方向正确。
5.先打到,待对中后,打到档,修改P001的参数Bit 1,使DP通信对接,如果DP网络正常些时“READY”灯为绿色。
四、附录
1.MCU24
从左到右模板依次为:开关量模板、A/D转换模板、伺服阀模板、通信模板。
在此介绍通信模板,X2为CAN-BUS总线接口,X4为PROFIBUS DP接口。
S4,S3为硬件地址,其中S4为高位。
2.放大器
接线:
发射线圈:1白,2棕。
接收线圈:1白,2黄,3绿,4棕。
CAN-BUS总线:2黄,4绿。
功能及设置:
S1为电压粗调,R1,R2为电压微调。
S2的3和S3的2必须设置到ON的位置。
S4的0为正常工作模式,一般工作就设置为这个值;7为通信模式,当与电脑相连时就应设置为7。
S50和S51为地址,如果在更换电路板时只需按原样设置。
H1~H8为指示灯,其中H1为CPU工作(为闪烁),H2为电源,H3为发射线圈,H4为接收线圈,H5为BMI系统状态,H6为是否有带钢,H7为CAN-CONT O.K(硬件状态),H8为CAN-BUS STATUS(通信状态)。
3.纠偏硬件地址
8组其地址依次为17,20,26,25,21,22,41,42。