汽车集团整车控制器HIL实例介绍
基于HIL的控制器故障注入及自动化测
基于HIL的控制器故障注入及自动化测试技术研发ResearchonControllerFaultInjectionandAutomatedTestingTechnologyBasedonHIL韩亚伟1,2 王 哲2(1上海机动车检测认证技术研究中心有限公司,上海 201805;2同济大学汽车学院,上海 201804)摘 要牶控制器的故障注入测试可模拟触发可能面临的各种故障,进而测试控制器在面临故障时的处置能力,以此对控制器的功能进行评估和改进。
介绍了基于美国国家仪器公司(NationalInstruments,NI)平台的硬件在环(hardware in the loop,HIL)测试系统,阐述了利用NI平台的LabVIEW与Veristand软件、开关矩阵与现场可编程门阵列(field programmablegatearray,FPGA)板卡等硬件,实现HIL测试及其自动化测试技术,并以车用电机控制器为例,介绍了故障注入方案及自动化测试开发过程。
关键词牶硬件在环测试 电机故障注入 自动化测试DOI牶10.16413/j.cnki.issn.1017080x.2022.06.010Abstract牶Thecontrollerfaultinjectiontestcansimulateandtriggervariousfaultsthatmaybefaced,andthentestthecontroller shandlingabilityinthefaceoffaults,soastoevaluateandimprovethefunctionofthecontroller.ThispaperintroducestheHIL(hardware in the loop)testsystembasedonNI(NationalInstruments)platform,expoundstheuseoftheNIplatform sLabVIEWandVeristandsoftware,switchmatrixandFPGA(field programmablegatearray)boardtorealizeautomatedtesttechnology,andthevehiclemotorcontrollerisusedasanexampletointroducethefaultinjectionschemeandtheautomatictestdevelopmentprocess.Keywords牶hardware in the looptest motorfaultinjection automatedtest0 引 言能源短缺和环境污染问题已经成为世界各国面临的严峻问题,燃油车的尾气排放是大气污染物的主要来源之一[1]。
HiL系统简介
HiL系统简介HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,减少了实车路试的次数,缩短开发时间和降低成本的同时提高ECU的软件质量,降低汽车厂的风险。
在新能源汽车这个全新的领域中,HiL硬件在环仿真测试对于三大核心电控系统:整车控制系统、BMS电池管理系统、MCU电机控制器是非常重要的。
但其高精度的实时性要求、大电压大电流的安全性、信号接口的特殊属性、以及系统的可扩展性都使得传统汽车电控系统的HiL硬件在环仿真测试系统无法解决。
意昂科技与欧美业内专业公司建立了合作伙伴关系,为国内汽车行业客户提供新能源的HiL硬件在环仿真测试解决方案。
意昂科技负责整套HiL系统的设计、制造、集成、初验收、安装调试、终验收和售后服务等,实施交钥匙工程。
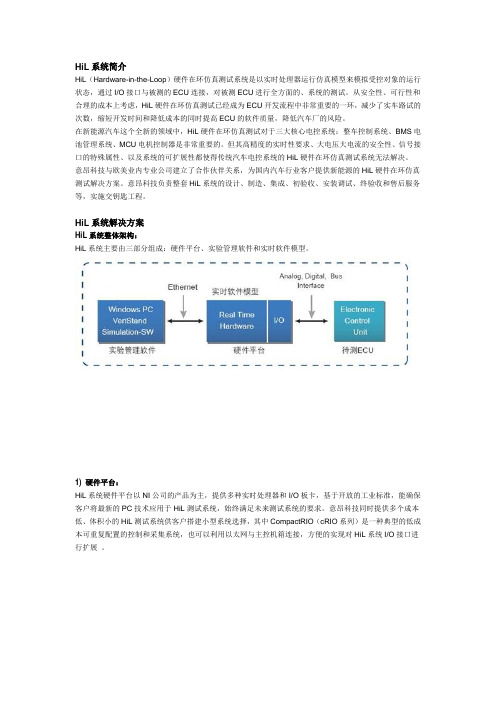
HiL系统解决方案HiL系统整体架构:HiL系统主要由三部分组成:硬件平台、实验管理软件和实时软件模型。
1) 硬件平台:HiL系统硬件平台以NI公司的产品为主,提供多种实时处理器和I/O板卡,基于开放的工业标准,能确保客户将最新的PC技术应用于HiL测试系统,始终满足未来测试系统的要求。
意昂科技同时提供多个成本低、体积小的HiL测试系统供客户搭建小型系统选择,其中CompactRIO(cRIO系列)是一种典型的低成本可重复配置的控制和采集系统,也可以利用以太网与主控机箱连接,方便的实现对HiL系统I/O接口进行扩展。
硬件平台主要组成部分:实时处理器、I/O 接口、故障注入单元(FIU), 通信接口、FPGA模块、负载模拟单元、信号调理单元、可编程电源、机柜和分线箱等。
2) 实验管理软件:HiL系统实验管理软件平台以NI VeriStand 2010 为核心组建,与实时处理器通过以太网连接,配合LabVIEW, FPGA Module,Real Time Module及其他丰富的功能扩展包,用户可进行:硬件配置管理自主更新硬件资源升级系统功能从Simulink等第三方建模环境中导入控制算法或系统模型提供测试命令创建可视化交互界面灵活修改用户界面配置激励生成事件警报完成测试自动化记录数据自动分析数据和生成报告等3) 实时软件模型:HiL系统实时软件模型主要包括:HiL系统采用开放的硬件平台,支持多种仿真模拟软件:发动机模型 Matlab/Simulink/Stateflow/RTW电池模型 LabVIEW Control Design and Simulation电机模型 Tesis enDYNA/veDYNA传动系统模型 CarSim/TruckSim驾驶员模型 GT-POWER车辆动力学模型 AMESim路面及环境模型等HiL系统主要特点:真正开放式的软硬件平台,支持第三方硬件,系统升级与扩展方便支持C, C++, Matlab/Simulink, LabVIEW, DLL等多语言环境实时高精度数据采集和数据多速率采样全球服务、支持与专业的合作伙伴方便集成第三方HiL产品- 电池模拟(DMC)- 电机仿真(OPAL-RT, SET)- 发动机仿真(MicroNova)交钥匙服务。
转向系统硬件在环(HIL)测试台架解决方案
转向系统硬件在环(HIL)测试台架解决方案一、背景汽车转向系统作为汽车底盘四大系统之一,从传统的液压助力转向系统(HPS)逐渐发展到现在的电动助力转向系统(EPS)。
在伺服电机和大量辅助系统支持下,已不再单纯的用于转向目的,随着智能驾驶技术的发展,ADAS/AD系统也离不开EPS的参与,例如LKAS、智能纠偏避障控制等一系列功能的实现。
随着越来越多软件功能集成,新的驾驶辅助系统的加入,极大的增加了对转向系统的稳定性,高性能开发测试的需求。
基于HiL的转向系统测试台架可以实现实车试验条件下难以达到的测试条件,比如安全保障、外部环境条件、边界极限,事故重现和故障注入等。
基于HIL的转向系统测试台架,可以在整车试装前高效重复调试转向系统性能,测试更加接近实车,从而加快我们的开发测试流程和效率。
二、挑战现今转向系统(EPS)在开发和测试流程中存在主要挑战是●基于转向模型的高效精准开发不同的车辆配置的性能操纵感调试三、解决方案适用于汽车智能化电气化的新型转向系统开发解决方案➢MXsteering model:可深入到模块层面的实时反馈三自由度模型精准的转向模型为前期系统开发或设计提供至关重要的基础。
MdynamiX自主开发的“Pfeffer MXsteering Model ”可以模拟传统液压和新型电机转向助力系统(管柱助力型、小齿轮助力型和齿条助力型)的运作。
拥有三个自由度的实时反馈模型可以深入到模块层面,全面反映出在高低频区域下的机械摩擦、刚度以及阻尼参数对转向手感的影响。
与此同时,转向力矩会被极其精准地预测出来,这对于开发和优化转向手感也是非常重要的。
该转向模型已经在dSPACE ASM,、IPG CarMaker 和 VI-CarRealTime 的整车模型中运用。
用户也可以集成在 MATLAB/Simulink 中与其他模块比如个性化的ECU 控制系统集成或者结合ADAS 控制系统进行仿真试验。
华为HI全栈智能汽车解决方案五大系统解析(2021年)

内容目录HI全栈智能汽车解决方案,形成五大系统1. 云-智能云平台1.1. 华为自动驾驶云服务1.2. 华为车联网云服务1.3. 华为高精地图云服务2. 管-智能网联平台:5G车载模组+T-Box+以太网关3. 端侧-智能驾驶系统:芯片硬件+OS+云服务+传感器4. 端-智能座舱系统:麒麟芯片+鸿蒙OS+应用生态5. 端-智能电动系统:mPower+芯片硬件+整车控制OS+三电云服务HI全栈智能汽车解决方案,形成五大系统华为基于在ICT领域积累的芯片、操作系统、机器学习算法、云服务等基础技术,全面进军智能汽车领域。
2020年10月30日发布华为智能汽车解决方案-HI品牌。
HI全栈智能汽车解决方案包括:1)1个计算与通信与通信架构,实现:硬件可扩展,软件可持续OTA升级更新。
华为在计算与通信架构(CCA)之上提出跨域集成软件堆栈(VehicleStack),共同构建数字系统,采用微服务和微插件,并基于服务理念而构造,为车企搭建可持续的盈利模式。
2)5大智能系统:智能车云、智能网联、智能驾驶、智能座舱、智能电动。
3)以及激光雷达等全套的智能化部件。
HI技术帮助汽车产业实现技术升级,快速开发领先的智能电动汽车,为消费者带来最佳出行体验。
华为赋能汽车E/E架构升级。
随着汽车行业由软件定义功能逐步取代硬件定义,华为使能汽车有分布式电子+电气架构向计算+通信架构转变。
架构升级核心体现为:硬件、软件、通信架构升级。
1)硬件架构升级:由分布式向域控制/中央集中式发展,算力利用率更高,统一交互,实现整车功能协同。
2)软件架构升级:软件架构分层解耦,促使软件通用性,便于管理供应商。
3)通信架构升级:LIN/CAN向以太网发展,满足高速传输、低延迟等性能需求。
图24:华为使能汽车由分布式电子电气架构向计算+通信架构转变4.1. 云-智能云平台基于昇腾910AI芯片打造智能云平台。
智能车云服务包括:自动驾驶云服务(提供数据服务、训练服务、仿真服务)、车联网云服务(三电、智能驾驶、智能座舱数据采集与存储)、高精地图云服务(打造动态地图聚合平台,不自己搭建地图,而是让地图供应商在云服务上呈现)。
汽车集团整车控制器HIL实例介绍

系统故障的判断和 存储,动态检测系 统故障信息,记录 出现的故障,并依 据故障的级别对整 车进行分级保护, 如降额输出,紧急 情况直接切断动力
协调管理其他车载 电器设备
01
整车控制器基本控制策略
PART
ACC上电,整车低压设备进
①
行自检
ON上电,VCU输出低压自保
控制信号,对高压上电设备
进行故障监测和诊断,如无
③
一般故障,整车控制器报警
( 报 警 灯 闪 烁 、 通 过 CAN 总
线发送相关的报警信息,通
知其他的节点),整个系统
降级运行。
重 大 故 障 状 态 : VCU 报 警
(紧急情况采用紧急呼叫指
令通知其他节点),必要时
切 ON断断主开继:电根器据电当源前,状系态统,停进
④
车 行电机负载卸载;卸载后断
辅助系统工作
测试用 例3
05
空调开启和关闭
PART
在系统准备就绪状态下 按下空调开关
①
水冷风扇控制有效 即水冷风扇控制灯亮
③
断开空调开关
⑤
水冷风扇控制无效 即水冷风扇控制灯灭
⑦
②
④
⑥
电动空调接触器线控输出 即空调接触器灯亮
整车系统状态2报文 (0xCF101D0)的空调控
制状态位置1 即启动
电动空调接触器线控输出 禁止
软件界面介绍(副界面)
PART
①
① 控制器输出
②
③
状态
② VCU报文输
入
③ VCU报文输
出
02
系统运行实况
PART
02
现场介绍及培训
PART
发动机ECU 硬件在环(HIL)测试方案
发动机ECU硬件在环(HIL)测试解决方案一、 方案概述1.1 HIL测试系统概述随着汽车电子技术的不断革新和迅速发展,汽车电控单元数量的不断增加,汽车电子产品和技术在各种车型中得到了越来越多的应用,其中,汽车电子系统成本约占到整车的30%,而汽车故障的产生多发生在汽车电子系统,因此,从安全性、可行性和成本上考虑,硬件在回路(HIL)测试已经成为电控系统开发和应用中非常重要的一环,减少实车路试,缩短开发时间并降低成本的同时提高电控系统的软件质量,降低电控系统开发和应用的风险。
HIL(Hardware‐in‐the‐Loop)硬件在回路测试系统是以实时处理器中运行的实体仿真模型来模拟受控对象的运行状态,通过I/O接口与被测电控系统连接,对被测ECU进行全方面的、系统的测试。
系统原理如图1.1中所示。
图1.1 HIL测试系统原理HIL测试系统的特点:●模拟被控对象的各种工况,包括极限工况;●模拟复杂的故障模式,快速复现故障模式;●将部分测试过程从传统试验台架中分离;●自动化测试并生成测试报告,缩短测试周期;●易于维护和扩展测试能力。
1.2SimCar硬件在环测试系统简介SimCar硬件在环(HIL)测试系统是用于测试电控单元功能、系统集成和通信的一套完整的硬件在环仿真测试设备,可用于汽车、航空、兵器、工程机械等领域。
基于SimCar硬件在环测试系统针对用户的被控对象进行建模仿真,并将其运行于跟控制器闭环工作的实时系统中,实现对汽车电控单元的复杂测试。
SimCar硬件在环仿真系统主要由三部分组成:仿真硬件平台、试验管理软件及车辆实时仿真模型。
系统组成示意图如图1.2中所示:图1.2 SimCar测试系统组成SimCar支持的电控单元硬件在环测试:发动机ECU;自动变速器TCU;混合动力整车控制器HCU;纯电动汽车VCU;蓄电池管理系统BMS;汽车防抱死制动系统ABS;车身控制器BCM;二、 基于SimCar的发动机ECU测试解决方案2.1 发动机ECU测试系统原理如图2.1发动机ECU测试系统原理中所示,在试验定义中,上位机试验管理软件运行于PC机环境中,通过PC机通信口与SimCar实时仿真平台通信,汽车实时仿真模型运行在仿真平台的实时处理器中,运行于处理器中的模型I/O通过仿真平台中的集成的信号调理、负载仿真及功率驱动等硬件与实际的发动机ECU构成闭环连接,实现发动机ECU的系统测试。
-----汽车集团整车控制器HIL实例介绍知识讲解
PXIe-6363模块
32路DIO 10MHz频率
PXI-8513模块
双路CAN 高低速兼容
整车simulink模型
①
在simulink中搭建整车动力学模型,如下图
02
PART
②
通过NI工具包将simulink模型导成 .dll文件,最终导 入PXI机箱运行
②
器输出转矩,同时限制电机的最高转速,
最高车速限制为100km/h,主减比5.1,
轮胎半径360mm
ON断开:根据当前状态,进行电机负载
④
卸载;卸载后断开各高压回路;复位高
压故障诊断;保存故障代码、行驶参数
等;最后断开低压自保控制
系统结构介绍
02
机柜总成结构
PART
供电箱及开关 工控机 PXI机箱 适配器
为16s
车辆的最高速度除了受到驱动力和负载阻力的限制,还受到整车控制器发给 电机控制器指令报文(0xCFF08EF)的转速正值限制。目前电机工作在转矩模 式,通过该转速正值,限制电机的最高转速,同时限制车速。当为满载质量 时,最高速度是由转速正值限制,此时整车控制器发出的指令转矩是260Nm, HIL模型计算得到的电机的实际输出转矩130.3Nm,在该转矩下,电机转速保 持在3800rpm。
PART
①
输入加速踏板到最大值,电压达到4.2V
②
观察整车控制器发给电机控制器指令报文 (0xCFF08EF)的指令转矩值,可以观察到当车速 为0时,指令转矩值为520Nm
③
整车动力学模型根据收到的指令转矩,计算得到驱
动电机的实际输出电磁转矩
测试过程
④
车辆加速,在前面板可以实时观测车速,电机转
HIL测试技术在汽车ECU开发流程中的应用
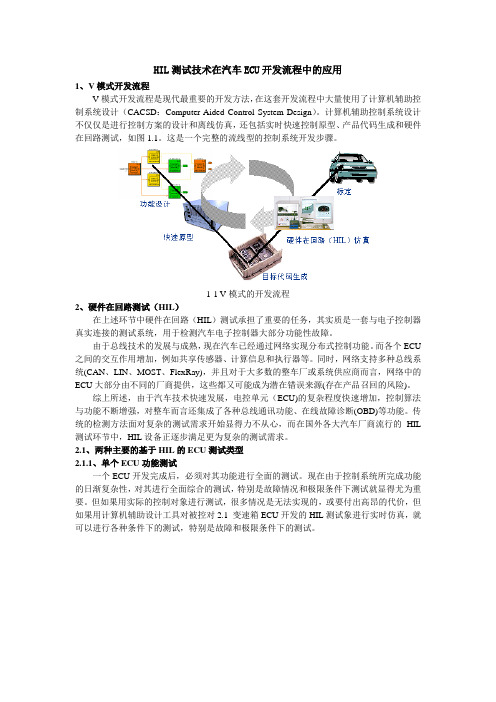
HIL测试技术在汽车ECU开发流程中的应用1、V模式开发流程V模式开发流程是现代最重要的开发方法,在这套开发流程中大量使用了计算机辅助控制系统设计(CACSD:Computer-Aided Control System Design)。
计算机辅助控制系统设计不仅仅是进行控制方案的设计和离线仿真,还包括实时快速控制原型、产品代码生成和硬件在回路测试,如图1.1。
这是一个完整的流线型的控制系统开发步骤。
1-1 V模式的开发流程2、硬件在回路测试(HIL)在上述环节中硬件在回路(HIL)测试承担了重要的任务,其实质是一套与电子控制器真实连接的测试系统,用于检测汽车电子控制器大部分功能性故障。
由于总线技术的发展与成熟,现在汽车已经通过网络实现分布式控制功能。
而各个ECU 之间的交互作用增加,例如共享传感器、计算信息和执行器等。
同时,网络支持多种总线系统(CAN、LIN、MOST、FlexRay),并且对于大多数的整车厂或系统供应商而言,网络中的ECU大部分由不同的厂商提供,这些都又可能成为潜在错误来源(存在产品召回的风险)。
综上所述,由于汽车技术快速发展,电控单元(ECU)的复杂程度快速增加,控制算法与功能不断增强,对整车而言还集成了各种总线通讯功能、在线故障诊断(OBD)等功能。
传统的检测方法面对复杂的测试需求开始显得力不从心,而在国外各大汽车厂商流行的HIL 测试环节中,HIL设备正逐步满足更为复杂的测试需求。
2.1、两种主要的基于HIL的ECU测试类型2.1.1、单个ECU功能测试一个ECU开发完成后,必须对其功能进行全面的测试。
现在由于控制系统所完成功能的日渐复杂性,对其进行全面综合的测试,特别是故障情况和极限条件下测试就显得尤为重要。
但如果用实际的控制对象进行测试,很多情况是无法实现的,或要付出高昂的代价,但如果用计算机辅助设计工具对被控对2.1 变速箱ECU开发的HIL测试象进行实时仿真,就可以进行各种条件下的测试,特别是故障和极限条件下的测试。
新能源电控系统HIL测试解决方案

概述
恒润科技基于HIRAIN TESTBASE-VVE(Virtual Vehicle Engineering)系统开发的新能源电控测试平台,可为新能源电控系统HIL测试提供功能丰富和完善的解决方案,该平台已在纯电动和混合动力汽车等新能源车辆积累了众多测试案例。
• VCU独立测试
• BMS独立测试
• MCU独立测试
•多ECU集成测试
• ECU接口测试
•故障诊断测试
•网络通讯测试
•算法功能验证
BMS HIL测试解决方案
电池系统特殊信号仿真板
高阶电池仿真模型
•电芯模拟
•高压模拟
•电流模拟
•温度模拟
•均衡测试
•绝缘监测
• SOC估计
•直流充电
•交流充电
•高压安全
MCU HIL测试解决方案
高速旋变信号仿真
高速三相电流仿真
• FPGA仿真•μs级步长• DQ模型•有限元模型• IGBT模型•旋变模拟•相电流模拟•缺相故障•相间短路•扭矩环验证•转速环验证。
整车硬件在环(HIL)测试系统软硬件介绍 ppt课件
ppt课件
CAN接口多,其它接口较少 电源:20W,6-40V 温度范围:-40-85摄氏度 良好抗震性,体积小
8
• 系统软件组成
MATLAB
SIMULINK
RTW
RTI
dSPACE 工具
• 分析,设计, 优化
• 离线的数据处理
RTW设置界面
代码编译
代码编译
周期
时间 数值计算方法
选择对应的 编译方法
ppt课件
生成*.sdf文件
Block reduction 设置为“Off”
16
• 一些注意点
• Simulink中的“Fcn”模块不能使用
• 其它工具箱中的模块多不能使用(DSP工具 箱中的“Filtering”模块可用)
• 仿真参数设置窗口中的“Block reduction”一 定设置为“Off”
• 串口
ppt课件
13
• RTI的设置(ADC模块为例)
I/O物理接口
模块功能
查手册 使用Help文档
ppt课件I/O特性 设置界面的参数描述 14
• RTI的设置(ADC模块为例)
12
6
A B
3组共6个50针接头
17
1
c
ppt课件DS1401接头
50
34
DS1103接头15
• RTW的设置及代码自动生成
ppt课件
6
• DS1103控制板
PowerPC 604e
主机接口
16M全局 SDRM
全局总线
全局总线
2M局部 2通用 RAM 定时器
整车多ECU系统HIL测试与分析

第56卷 第8期Vol. 56 No. 82018年8月August 2018农业装备与车辆工程AGRICULTURAL EQUIPMENT & VEHICLE ENGINEERINGdoi:10.3969/j.issn.1673-3142.2018.08.023整车多ECU系统HIL测试与分析刘江波,杨发松,孙涛(230601 安徽省 合肥市 安徽江淮汽车集团股份有限公司技术中心 汽车智能网联技术安徽省重点实验室 )[摘要] 整车系统匹配ECU不断增多,各个ECU之间的设计匹配与测试已经成为整车电子电气系统开发阶段的重要环节。
基于dSPACE的实时仿真系统建立整车架构系统多ECU硬件在环(HIL)台架,针对各电控单元的功能策略、网络通信系统的故障注入、电气故障和功能故障及诊断模拟整车环境进行所有测试用例的测试,提高整车电子电气系统安全、可靠性。
[关键词] 汽车;ECU;多系统;硬件在环测试[中图分类号] U467.1 [文献标识码] B [文章编号] 1673-3142(2018)08-0089-04Vehicle Multi-ECU Hardware-in-the-Loop Test and AnalysisLiu Jiangbo, Yang Fasong, Sun Tao(Anhui Janghuai Automobile Group Corp., Ltd., Hefei City, Anhui Province 230601, China)[Abstract] ECUs on vehicle systems continuously increase, and design compactness and testing among various ECUs has become an important part in the development phase of vehicle electrical systems. Based on dSPACE real-time simulation system, build vehicle architecture system multi-ECU hardware-in-the-loop (HIL) bench. For function strategy of each electronic control unit, fault injection of network communication system, electrical fault and function failure and diagnosis simulation of vehicle environment, test all test cases to improve the safety and reliability of vehicle electronic and electrical systems.[Key words] automotive; ECU; multi-system; hardware-in-the-loop testing0 引言随着汽车电子技术的快速发展,整车匹配的ECU越来越多。
基于HIL的车载空调控制器的自动化测试

基于HIL的车载空调控制器的自动化测试作者:黄欣贺洪江来源:《科技视界》2017年第13期【摘要】提出了一种用于车载空调控制器自动化测试的硬件在环测试系统(HIL),全面介绍了HIL软硬件设计方案,通过搭建测试模型,编辑并执行测试程序,完成车载空调控制器逻辑功能的自动化测试。
【关键词】HIL;车载空调;自动化测试【Abstract】This paper has put forward an automated test method for automotive HVAC ECU based on hardware in loop(HIL). It introduces the software and hardware design scheme of HIL. Through constructing the test model, editing and performing the test procedure, then achieved the automated test of logic function for automotive HVAC ECU.【Key words】HIL; Automotive HVAC; Automated test0 引言随着汽车智能化、网联化、生态化的发展,车载空调系统现已是车辆舒适系统中必不可少的部分,空调控制器的功能也越来越多样化,从而对空调控制器的功能和可靠性方面也带来了巨大的挑战,因此在空调控制器的开发过程中,其测试工作也是必不可少的。
在空调控制器的台架测试中,若能实现自动化测试,不仅可以替代重复性较高的令人乏味的测试工作,而且还可使测试人员节省大部分时间进行实车可靠性与舒适性验证,从而提高控制器的整体品质。
1 空调控制器的工作原理空调系统主要由压缩机、HVAC、冷凝器总成、制冷管、暖风水管、各传感器、空调控制器、空调控制面板等组成,如图1所示,以制冷循环为例,简单介绍汽车空调系统的工作原理[1]。
基于HIL的车载网关控制器的自动化测试研究
10.16638/ki.1671-7988.2021.05.040基于HIL的车载网关控制器的自动化测试研究巫辉燕,林汉雄(广州汽车集团股份有限公司汽车工程研究院,广东广州510640)摘要:车载网关控制器(简称GW)是汽车网络架构中重要的ECU控制单元,负责不同网络之间报文与信号的转换与路由处理。
因此,网关控制器的可靠性要求是非常高的。
文章对网关控制器测试验证进行了自动化测试研究,提出了两种实现网关自动化测试的方法,对网关控制器研发过程中的测试验证提供了极其重要的参考价值。
关键词:车载网关;HIL;自动化测试中图分类号:U467 文献标识码:A 文章编号:1671-7988(2021)05-140-03Research on Automation Test of Automotive Gateway Based on HILWu Huiyan, Lin Hanxiong( Guangzhou Automobile Group Co., Ltd., Automobile Engineering Institute, Guangdong Guangzhou 510640 )Abstract:Gateway(short for GW) is an important ECU in the automotive network architecture, it’s responsible for the conversion and routing of messages and signals between different networks. Therefore, the high reliability is required. In this paper, it makes research work on the automation test of GW and presents two methods to realize GW Automaton test which provides important reference value for the test verification in the development process of GW.Keywords: Automotive gateway; HIL; Automation TestCLC NO.: U467 Document Code: A Article ID: 1671-7988(2021)05-140-03前言网关控制器是汽车整车电子电气架构中的核心ECU,车载网关作为车载网络中信息交换的核心[1],整车信号传输的枢纽,其主要的功能有路由、网络管理、波特率转换以及诊断刷新等。
Hil在汽车整车测试及开发系统中的应用
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在simulink中搭建整车动力学模型,如 下图
02
PART
②
通过NI工具包将simulink模型导成 .dll 文件,最终导入PXI机箱运行
02
软件界面介绍(主界面)
PART
③ ②
①
① 实验模型控
制
② 整车控制输
入
③ 仪表显示
④ 故障报警
④
⑤ 整车综合信
息
⑤
02
软件界面介绍(副界面)
PART
开各高压回路;复位高压故
障诊断;保存故障代码、行
驶参数等;最后断开低压自
保控制
系统结构介绍
02
机柜总成结构
PART
供电箱及开关 工控机 PXI机箱 适配器
信号调理箱 负载箱
02
操作台结构ຫໍສະໝຸດ PART挂板 待测控制器
接线导轨 操作台 上位机界面
02
硬件组成介绍
PART
PXIe-1082机箱
4个混合插槽 3 个 PXI Express
踩刹车并换D 档,松刹车, 换档完成
① 电机控制器控制指 令报文(0xCFF08EF) 的控制模式位置2, 即电机转换为转矩 模式,车辆准备就 绪,可以运行。
满载最高时速测试
测试用 例2
已知参数
参数名称
01 满载总质量
02 空载总质量
03 减速器速比
04 设定机械传动效率
05 设定车辆轮半径
06 设定车辆迎风面积
系统故障的判断和 存储,动态检测系 统故障信息,记录 出现的故障,并依 据故障的级别对整 车进行分级保护, 如降额输出,紧急 情况直接切断动力
协调管理其他车载 电器设备
01
整车控制器基本控制策略
PART
ACC上电,整车低压设备进
①
行自检
ON上电,VCU输出低压自保
控制信号,对高压上电设备
进行故障监测和诊断,如无
****汽车集团整车控制器 HIL
待测控制器介绍
****整车控制器概况
80PI N
01
PART
22路DI 6路AI 2路Can 23路DO 3路AO 4路PWM
01
整车CAN通信网络拓扑结构
PART
数字 仪表
BMS
监控 终端
CAN Bus 2
车身 CAN
CAN Bus
1
电机
转向
控制
助力
器
油泵
动力 CAN
图所示。记录该转矩和转速的关系并绘制曲线,判
断该曲线是否合理
04
PART
04
测试过程
PART
⑦
HIL测试得到结果:最高车速为
80Km/h,加速时间为16s
车辆的最高速度除了受到驱动力和负载阻力的限制,还 受到整车控制器发给电机控制器指令报文(0xCFF08EF) 的转速正值限制。目前电机工作在转矩模式,通过该转 速正值,限制电机的最高转速,同时限制车速。当为满 载质量时,最高速度是由转速正值限制,此时整车控制 器发出的指令转矩是260Nm,HIL模型计算得到的电机的 实际输出转矩130.3Nm,在该转矩下,电机转速保持在 3可8以00在rpm31。00kg到4460kg之间任意输入整车质量,进行上 述过程测试计算
01
整车控制器基本功能与用途
PART
接收、处理驾驶员 的驾驶操作指令, 并向各个部件控制 器发送控制指令, 使车辆按驾驶期望 行驶
与 电 机 、 DC/DC 、 BMS等进行可靠通 讯 , 通 过 CAN 总 线 进行状态的采集输 入及控制指令量的 输出
接收处理各个零部 件信息,结合BMS 单元提供当前的能 源状况信息,实现 整车驱动控制、能 量优化控制、制动 回馈控制和网络管 理等功能
③
整车动力学模型根据收到的指令转矩,
计算得到驱动电机的实际输出电磁转
矩
测试过程
④
车辆加速,在前面板可以实时观测
车速,电机转速等数据,如下图所
示
04
PART
测试过程
⑤
得到车辆的加速过程速度时间曲线
如下图所示
04
PART
测试过程
随着车速升高,整车控制器发出的指令转矩减小,
⑥
整车控制器发出的指令转矩和实际车速的关系如下
并显示报文
ON上电
① 低压自保输出 ② 电机控制器启动 ③ 预充电开始 ④ DC/DC接触器线控
输出 ⑤ 待预充电完成后主
接触器吸合 ⑥ DC/DC使能控制 ⑦ 电机控制器准备就
绪灯亮 ⑧ 动力系统准备就绪
灯亮
START启动1s
① 转向助力泵控制 ② 油泵DCAC控制报
文 (0x10242E27) 的 启动命令为置1, 即启动 ③ 仪 表 板 READY 灯 亮 ④ 电机控制器启动输 出灯亮
故障则主接触器吸合,启动
高压辅助系统控制逻辑
START启动(1s以上):开启
电机控制器、转向助力泵控
制VC逻U采辑集,油无门故踏障板报信警号则,点亮控
②
绿制色电R机ea控dy制灯器输出转矩,同
时限制电机的最高转速,最
高 车 速 限制 为 100km/h, 主
减比5.1,轮胎半径360mm
一般故障状态:VCU检测到
③
一般故障,整车控制器报警
( 报 警 灯 闪 烁 、 通 过 CAN 总
线发送相关的报警信息,通
知其他的节点),整个系统
降级运行。
重 大 故 障 状 态 : VCU 报 警
(紧急情况采用紧急呼叫指
令通知其他节点),必要时
切 ON断断主开继:电根器据电当源前,状系态统,停进
④
车 行电机负载卸载;卸载后断
①
① 控制器输出
②
③
状态
② VCU报文输
入
③ VCU报文输
出
02
系统运行实况
PART
02
现场介绍及培训
PART
02
现场介绍及培训
PART
02
现场介绍及培训
PART
测试用 例1
VCU上电过 程测试
03
VCU上电过程测试
PART
ACC上电
① 低压上电 ② 整车控制器收发报
文 ③ HIL 可 以 实 时 收 发
07 设定车辆风阻系数
08
设定车辆行使摩擦系数 (100km/h)
04
PART
符号
m mk iz ηt r area Cd fk
数值
4460 3100 5.1 0.9 0.365 4.6 0.45 0.014
单位
kg kg
m m^2
04
测试系统初始状态
PART
HIL
VCU和HIL 连接正常
D N R
插槽 每插槽1 GB/s的
PXIe主机控制器
2.3 GHz 四 核 Intel Core i7
内存8GB
PXIe-6356 模块
PXIe-6363 模块
PXI-8513 模块
8路同步AI 32路DIO 双路CAN
16位分辨率 10MHz频率 高低速兼容
250kS/s采样
率
整车simulink模型
VCU系统 上电正常
整车控制器发 给电机控制器
指令报文 (0xCFF08EF) 的电机控制器
使能位为1
档位位于D档
04
测试过程
PART
①
输入加速踏板到最大值,电压达到4.2V
②
观察整车控制器发给电机控制器指令 报文(0xCFF08EF)的指令转矩值, 可以观察到当车速为0时,指令转矩 值为520Nm