智能仪器 温度测量..
温度计的使用方法和注意事项

温度计是一种常见的测量温度的仪器,它在医疗、科研、工业等领域都有着广泛的应用。
正确的使用方法和注意事项对于准确测量温度、保护仪器以及人身安全都至关重要。
以下将介绍温度计的使用方法和注意事项。
一、温度计的使用方法1.选择适当的温度计:根据需要测量的温度范围和精度要求选择合适的温度计,常见的温度计有普通温度计、红外线温度计、数字温度计等。
2.校准温度计:使用前要确保温度计已经校准,确保准确度和精度。
3.正确放置温度计:使用时要确保温度计的探头完全接触被测物体表面,避免空气的影响。
4.等待稳定:在测量过程中,要等待温度计显示的数值稳定后再进行记录。
二、温度计的注意事项1.避免受潮:温度计是一种精密仪器,应该避免受潮,使用后应该及时擦干,存放在干燥通风的地方。
2.防止震动和跌落:温度计是一种精密仪器,应该避免受震动和跌落,以免损坏。
3.使用过程中保持清洁:使用温度计前后要保持探头的干净,避免污染影响测量准确性。
4.谨慎处理:使用温度计时要轻拿轻放,避免摔碰或者撞击。
文章中提到的使用方法和注意事项是使用温度计时需要特别注意的问题,只有正确的使用和注意才能保证温度计的准确度和使用寿命。
希望本文对您在使用温度计时有所帮助。
三、温度计的维护和保养1.定期校准:为了确保温度计的准确性,在使用一段时间后应该定期对温度计进行校准,校准频率根据使用频率和精度要求而定。
2.存放温度计:在存放温度计时,应该将其放置在干燥通风的地方,并且避免高温、潮湿以及日光直射的地方,以免影响仪器的性能和准确度。
3.清洁温度计:定期清洁温度计的外部表面和探头,避免灰尘、油脂和其他杂质的堆积影响测量的准确性。
4.注意电池电量:如果是电子温度计,则要定期检查电池电量,保持电池的电量充足,以免影响仪器的使用。
四、不同类型温度计的使用方法和注意事项1.普通温度计:使用时应该确保温度计的水银或酒精能够完全接触被测物体表面,避免出现气泡或者不良接触导致的不准确测量;在测量结束后,应该将温度计轻轻拿起,避免摔碰或者打翻。
智能仪器设计温度传感器的完整设计
指导老师: 班级:姓名:学号:目录1系统方案 (1)1.1 测温模块的论证与选择 (1)1.2 电源电路切换模块的论证与选择 (1)1.3 控制系统的论证与选择 (1)1.4 显示模块的论证与选择 (2)1.5键盘模块 (2)2系统理论分析与计算 (3)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1系统总体框图 (4)3.1.2 电源转换电路子系统的设计 (4)3.1.3 STC89C52单片机子系统的设计 (5)3.1.4电源的设计 (6)3.1.5温度采集电路子系统电路的设计 (7)3.1.6键盘模块 (7)3.2程序的设计 (8)3.2.1程序功能描述 (8)3.2.2程序流程图 (8)4测试方案与测试结果 (9)4.1测试方案 (9)4.2 测试条件与仪器 (9)4.3 测试结果及结论 (9)1系统方案本系统主要由测温模块、电源电路切换模块、控制系统模块、显示模块、键盘模块及电源模块组成,下面分别论证这几个模块的选择。
1.1 测温模块的论证与选择方案一:PT100温度传感器采用铂金属,它的阻值随温度上升而匀速增长,但是外接硬件电路复杂,需AD转换,测量范围小,精度一般。
方案二:采用数字温度传感器DS18B20,因其内部集成了A/D转换器,使得电路结构更加简单,而且减少了温度测量转换时的精度损失,使得测量温度更加精确。
数字温度传感器DS18B20只用一个引脚即可与单片机进行通信,大大减少了接线的麻烦,使得单片机更加具有扩展性。
由于DS18B20芯片的小型化,更加可以通过单跳数据线就可以和主电路连接,故可以把数字温度传感器DS18B20做成探头,探入到狭小的地方,增加了实用性。
鉴于DS18B20以上优点,故采用方案1.2 电源电路切换模块的论证与选择方案一:使用开关型手动切换电路不能受单片机控制,耗费人力,切换不及时,精度不准确,易受人为干扰等。
方案二:使用继电器使用两个继电器在电路初始状态下是输出端全部接地使电路在初始状态时处于不工作状态,而且它能实现单电源的正负实时切换,简单易行,元器件选择容易,焊接简单且控制效果很不错。
智能仪器在温度测控系统中的应用
() 盘 扫 描 任 务 5键 该 任 务 的功 能 是 识 别 按 下 的键 值 并 向 消 息处 理 任 务 发 送 消 息 。 盘扫 键
描过程就是让处理器按有规律地时间间隔查看键 盘矩阵, 以确定是否有键 被按下 。 2 4数 据 采 集 程 序 设 计 . 为了及时对 A D转换进 行响应,软件采用 中断方式处理采集到 的数 / 据 。数据采集程序可 分为两部分 :/ A D转换主程序和外部中断 0服务程序。 A D转换主程序 主要是实现 LC 24硬件初 始化、外部 中断 0初始化 , / P 29 完 成对 L C 6 6的启动 。外部 中断 0服务程序主要是及 时读 出 A D转换 结 T嵌入 的高速 F a h存储器。18位宽度的存储器接 IS P , 5K ls 2 口和独特的加速结构使 3 2位代码能够在最大 时钟速 率下运 行。对代码 规 模有严格控制, 使用 1 6位 T u b模式可将代码规模 降低 , hm 而性能的损失却 很小 。 2 温度测控系统软件设计 、 智能仪表的许多功能是在硬件设计 的基础上用软件 来实现 的, 其主要 任务包括 : 设 置 、 改 、 示 仪表 的 参数 : 修 显 检 测 、 算 、 示 温度 等 工况 参 数 ; 计 显 温度状态指示及报警输出; 定 时 存 储 各 种 检 测及 运 算参 数 。 2 1 动 代 码 (o t la e ) .启 Bo o d r 由于 A M系统的是复杂 的片上系统 (O ) 这种复杂 系统里 的多数 硬 R SC, 件 模 块 都 是 可 以配 置 的 , 需要 由 软件 来 确 定 其 工作 状 态 。 由于 这类 代 码 直 接 面 对 处 理 器 内 核 和 硬 件 控 制 器 进 行 编 程 , 般 使用 汇 编 语 言 编 写 , 动 一 启 代码就是完成各种初始化工作, 并到 引导进入 C语言程序 。 2 2嵌 入 式 软 件 设 计 . 针 对 每 一 部 分 所 需 要 完 成 的任 务 , 操 作 系统 的 各个 部 分 可 划 分 为 如 对 下模块 : () 统 外 围设 备 的硬 件 模 块 , 括 : 晶 显 示 屏 (C )G IU B通 信 1系 包 液 L D / U ,S 模 块 , 盘 , 储 器 、 统 的 时钟 日历 等 。 键 存 系 () 动 程 序 模 块 , 动 程 序 模 块 是 连 接 底 层 的 硬 件 和 上 层 的 A I函 2驱 驱 P 数 的纽带, 了驱动程序模 块, 有 就可 以把操 作系统的 A I函数和底层 的硬 P
电子温度计
电子温度计电子温度计一、引言电子温度计是一种使用电子元器件进行温度测量的仪器,具有快速、准确和便携等优点,被广泛应用于工业、医疗、农业、科研等领域。
本文将详细介绍电子温度计的工作原理、分类、应用以及发展趋势等方面,旨在帮助读者更好地了解和使用电子温度计。
二、工作原理电子温度计通过测量物体的温度与电子元器件之间的关系,间接地得出温度值。
其中最常用的原理是热敏电阻、热电偶和红外测温。
1. 热敏电阻热敏电阻是一种电阻随温度变化的元件,它的电阻值与物体的温度成正比关系。
电子温度计中的热敏电阻会随着温度的变化而产生电压,通过测量这个电压值可以得到物体的温度。
热敏电阻广泛应用于家用电器、汽车以及医疗设备等领域。
2. 热电偶热电偶是由两种不同金属引线焊接而成的元件,它利用两种金属在温度变化下产生的电动势来测量温度。
根据热电偶的材料不同,其温度范围可以达到较高的温度。
热电偶常被用于高温环境下的测温,如航天、冶金和化工等领域。
3. 红外测温红外测温利用物体自身辐射的红外辐射能量与温度之间的关系来测量温度。
通过红外传感器捕捉物体发出的红外辐射,转化为电信号后,经过数学处理即可得到温度值。
红外测温广泛应用于生产线的自动化控制、医院的体温测量以及消防领域。
三、分类按照使用场景和测量范围的不同,电子温度计可分为接触式和非接触式温度计。
1. 接触式温度计接触式温度计需要与被测物体接触,通过物体传导热量的方式进行温度测量。
常见的接触式温度计有电阻温度计、热电偶温度计和温度计枪等。
- 电阻温度计:电阻温度计利用热敏电阻的原理进行温度测量,适用于较为精确的实验和工业领域。
- 热电偶温度计:热电偶温度计利用热电偶的温度特性进行温度测量,适用于高温环境和特殊工况。
- 温度计枪:温度计枪利用红外测温原理进行温度测量,适用于远距离、快速测温。
2. 非接触式温度计非接触式温度计不需要与被测物体接触,通过测量物体发出的红外辐射来得出温度值。
温度测量技术的发展与应用

温度测量技术的发展与应用温度是指物体内部分子振动的程度,是描述物体热能状态的物理量。
在工业、农业、医疗等领域中,温度一直都是一个非常重要的参考值。
因此,测温技术的发展一直备受瞩目。
一、温度的测量方式1. 接触式温度计接触式温度计是最普遍的温度测量方法之一。
它需要将温度计的测量头与物体接触,通过测量头将真实温度传到显示仪器上。
接触式温度计包括普通的水银温度计、铂电阻温度计、热敏电阻温度计等。
这些温度计的精度和使用条件各不相同。
2. 非接触式测温技术近年来,随着红外线技术的发展,非接触式温度测量技术得到了广泛应用。
这种技术通过测量物体表面辐射出的红外线,来推断物体的温度。
它们可以测量高温物体如炉子、发动机等处于400℃-2000℃范围的表面温度。
而且,由于无需接触测量,非接触式温度计可以在危险、不适合人工接触的环境中使用,使用非常广泛。
3. 光学式测温技术光学式测温技术使用的物理原理同非接触式温度计,也是通过物体表面的光谱特性,并结合对物体表面热辐射的观察,精确测量物体的温度值。
这种技术应用范围在1000℃-2000℃之间。
二、温度测量技术的进展1. 新型的传感器新型的温度传感器在内部电路的设计、外观结构等方面得到了优化。
包括热敏电阻、铂电阻、热电偶,以及新兴的MEMS (基于微机电系统)技术制造出来的微型温度传感器。
这些新型传感器具有更高的精度和更持久的稳定性,而且更加灵活。
2. 智能温度计随着微电子技术、通信技术的发展,新一代的智能温度计问世了。
智能温度计不仅可以实现数据采集、处理和记录,还可以与计算机、网络等互连,实现远程数据传输及其它更先进的功能。
这使得温度管理变得更加便捷高效,大大提高了工作效率。
三、温度测量技术的应用情况1. 工业领域温度的测量在工业控制中十分重要。
例如,钢铁、化学工业等行业中,需要测量高温物体的温度。
而非接触式温度计因其速度快、精度高、适用于危险场合等特点,因此广泛应用于工业生产的各个方面。
温度测控仪设计-毕业设计

温度测控仪设计学生:XXX 指导教师:XXX内容摘要:本文主要介绍了智能温度测量仪的设计,包括硬件和软件的设计。
先对该测量仪进行概括性介绍,然后介绍该测量仪在硬件设计上的主要器件:“Pt100热电阻”、AT89C51单片机和LCD显示器以及描述测量仪的总体结构原理。
在本设计中,是以铂电阻PT100作为温度传感器,采用恒流测温的方法,通过单片机进行控制,用放大器、A/D 转换器进行温度信号的采集。
总体来说,该设计是切实可行的。
关键词:温度 Pt100热电阻 AT89C51单片机 LCD显示器Design of and control instrumentAbstract: This paper describes the design of the intelligent temperature measuring instrument, including hardware and software design. Be the first general description of the measuring instrument, and then describes the hardware design of the measuring instrument's main device: "Pt100 thermal resistance", AT89C51 microcontroller and LCD display, and describe the principle of measuring the overall structure. In this design, as is the PT100 platinum resistance temperature sensor, temperature measurement using constant current method, through the microcontroller to control, amplifier, A/D converter for temperature signal acquisition. Overall, the design is feasible.Keywords:temperature Pt100 thermal resistance AT89C51 microcontroller LCD monitor.目录前言 (1)1 总体硬件方案设计 (1)1.1温度传感器的放大电路设计 (2)1.2TLC549模数转化电路设计 (4)1.3显示电路设计 (5)1.4无线发送与接收模块的选择与设计 (5)1.5键盘设计 (6)2 总体的软件程序的设计 (6)2.1温度数据采集和数据处理子程序的设计 (6)2.2温度显示、保存处理的子程序设计 (7)2.3无线发送与接受的子程序的设计 (7)2.4十组温度查询的子程序设计 (9)3 调试与结果分析 (10)3.1调试仪器及方法 (10)3.3软、硬件调试与故障原因分析 (10)4 结束语 (10)附录1:硬件原理图及PCB板 (12)附录2:软件程序代码 (13)参考文献 (34)温度测控仪的设计前言随着工业生产效率的不断提高,自动化水平与范围也不断扩大,因而对温度检测技术的要求也愈来愈高,现在工业上通用的温度检测范围为200 ~3000℃,而今后要求能测量超高温度与超低温度。
基于单片机的热敏电阻温度计的设计

基于单片机的热敏电阻温度计的设计
随着科技的不断发展,各种电子设备应用也越来越广泛。
热敏电
阻温度计便是其中之一,它是一种利用物质温度对电阻值的变化来实
现温度测量的智能仪器。
本篇文章将介绍热敏电阻温度计的设计及其
原理。
首先,我们需要准备的材料有单片机、热敏电阻、电阻、显示屏、连接线以及电源。
将这些材料准备齐全后,便可以开始进行热敏电阻
温度计的设计。
我们需要将热敏电阻、电阻、单片机连接成电路。
电路连接后,
需要进行编程,以使得单片机能够读取热敏电阻和电压值,并将其转
换成温度值。
通过显示屏将温度值显示出来,实现对温度的实时监测。
在热敏电阻温度计设计的过程中,需要注意以下几点:
1. 选用合适的热敏电阻:热敏电阻的温度系数决定了它在不同温
度下的电阻值,因此需要选择合适的热敏电阻。
2. 电路的稳定性:电路中各部分的连接不可松动,否则会影响温
度测量的准确性。
3. 编程的准确性:需要通过合理的代码编写来实现对热敏电阻和
电压值的正确读取和转换,确保温度测量的准确性。
总之,热敏电阻温度计因其简单易用、准确度高等优点被广泛应
用于各种领域中,例如工业制冷、医疗设备等。
希望通过本篇文章的
介绍,能够帮助读者更好地了解热敏电阻温度计的设计及其原理,以便于更好地应用于实际生活生产中。
PT1000温度测量

图 7 显示电路
根据要求,显示最高位为百位,最低位为小数点后两位。 2、软件设计 软件部分分为延时子程序, 显示子程序,数据处理子程序以及主程序四个部 分。程序主流程图如下:
开始 系统初始化
PT1000 温度数据采集
处理读到数据
LED 显示
结束
图 8 系统总流程图
(1)主程序 用于控制单片机开关中断和调用子程序以实现数据的处理和显示, 流程图如 下:
图 5 A/D 转换电路
ADC0808 是采样分辨率为 8 位的、以逐次逼近原理进行模/数转换的器件。 其内部有一个 8 通道多路开关,它可以根据地址码锁存译码后的信号,只选通 8 路模拟输入信号中的一个进行 A/D 转换。 (4)数据处理电路 通过 AT89C51 单片机对 ADC0808 处理后的数据进行分析计算以用作输出。 具体电路图如图 6 数据处理电路:
Design of temperature measuring instrument based on PT1000
Abstract: This paper mainly introduces the design of temperature measuring instrument, including the hardware design and software design. This paper introduces the overall structure of the system, then the system design process were introduced ( including the hardware part and software ), the last of this design were summarized in this paper. In this design chose PT1000 as a temperature sensor, adopts a constant-current source method for temperature measurement, through the microcontroller to control, amplifier, A / D converter temperature signal acquisition. In general, the design is feasible. Key words: AT89C51 microcontroller; Pt1000 thermal resistance; temperature;
智能仪器课程设计报告

天津电子信息职业技术学院传感器技能实训课题名称智能温度测温系统姓名王先民学号20班级电信S10-1专业电子信息工程技术所在系电子技术系指导教师岑永祚完成日期2011年12月11日一、 主要内容温度传感器DS18B20采集环境模拟信号,其输出送入AT89C51,单片机在程序的控制下,将处理过的数据送到移位寄存器74LS164,经74LS164输出后驱动三位数码管显示。
当被测温度高于18℃时,单片机发出控制信号使降温电扇以自然风的形式旋转,温度越高转速越快,温度36℃以上时风扇全速工作,点亮此功能指示灯。
二、 基本要求(1)设计测量温度范围-55℃~+125℃的智能测温系统,要求数码管实时显示测量温度,单片机根据温度高低确定风扇转速 (2)画出程序框图(3)有完整的整机电路图(protel 绘制)(4)完成格式正确、内容完整的实验报告三、 参考文献王祁, 智能仪器设计基础.北京:机械工业出版社,2009目录一、前言 (4)二、系统组成 (4)1、设计思路 (5)2、系统的性能指标: (5)3、系统的主要功能: (5)三、电路组成及工作原理 (5)1、温度传感器功能模块 (6)2、AT89C51单片机 ........................................................................................................ 8 3、74LS164移位寄存器 .. (12)4、晶振电路 (12)5、复位电路 ................................................................................................................... 13 6、键盘电路 . (13)7、显示电路 (14)8、稳压电路 ................................................................................................................... 14 9、显示电路 . (15)10、风扇控制电路 (15)四、课程设计心得与体会 (16)五、参考文献 (16)六、整机电路图 (17)七.心得体会 (18)智能温度测量系统的设计一、前言温度是一种基本的环境参数,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量。
智能温度测量仪课程设计 (1)
智能温度测量仪课程设计报告专业:班级:姓名:学号:指导教师:----智能温度测量仪摘要:本文主要介绍了智能温度测量仪的设计,包括硬件和软件的设计。
先对该测量仪进行概括性介绍,然后介绍该测量仪在硬件设计上的主要器件:“Pt100热电阻”、AT89C51单片机和LCD显示器以及描述测量仪的总体结构原理。
在本设计中,是以铂电阻PT100作为温度传感器,采用恒流测温的方法,通过单片机进行控制,用放大器、A/D转换器进行温度信号的采集。
总体来说,该设计是切实可行的。
关键词:温度;Pt100热电阻;AT89C51单片机;LCD显示器。
引言:温度是日常生活、工业、医学、环境保护、化工、石油等领域最常遇到的一个物理量,也是工业控制中主要的被控参数之一。
对温度的测量与控制在现代工业中也是运用的越来越广泛。
而传感器主要用于测量和控制系统,它的性能好坏直接影响系统的性能。
因此,不仅必须掌握各类传感器的结构、原理及其性能指标,还必须懂得传感器经过适当的接口电路调整才能满足信号的处理、显示和控制的要求,而且只有通过对传感器应用实例的原理和智能传感器实例的分析了解,才能将传感器和信息通信与信息处理结合起来,适应传感器的生产、研制、开发和应用。
另一方面,传感器的被测信号来自于各个应用领域,每个领域都为了改革生产力、提高工效和时效,各自都在开发研制适合应用的传感器,于是种类繁多的新型传感器及传感器系统不断涌现。
温度传感器是其中重要的一类传器。
其发展速度之快,以及其应用之广。
并且还有很大潜力为了提高对传感器的认识和了解,尤其是对温度传感器的深入研究以及其用法与用途,基于实用、广泛和典型的原则而设计了本系统。
本文利用单片机结合温度传感器技术而开发设计了这一温度测量系统。
文中将传感器理论与单片机实际应用有机结合,详细地讲述了利用热电阻作为温度传感器来测量实时的温度,以及实现热电转换的原理过程。
本设计系统包括温度传感器,信号放大电路,A/D转换模块,数据处理与控制模块,温度显示五个部分。
智能仪器课程设计任务书

智能型温度测试仪任务书
题目:智能型温度测量仪
院别:机电工程与自动化
专业:生产过程自动化技术
班级:xxx
姓名:xxx
Xxx
Xxx
指导老师:xxx
《智能型仪器仪表》设计任务书一、设计系统名称
智能型温度测量仪
二、性能指标
DS18B20利用单总线的特点可以方便的实现多点温度的测量,轻松的组建传感器网络,系统的抗干扰性好、设计灵活、方便,而且适合于在恶劣的环境下进行现场温度测量。
1、具有数码管显示时间,如12:00。
2、显示温度二位数值,如50 ºC。
3、按键功能,设计中共使用了4个按键,第一个为功能键用
来切换按键用来切换时间的时、分;第二个按键为加键;第三个为减键;第四个为设置取消键
三、任务分配
1.人员安排:
由xxx编写程序、画原理图
由xxx做ppt。
由xxx收集资料。
课程设计进程安排表。
PT100高精度温度测量
仪器科学与光电工程学院智能温湿度测量记录仪研究报告光信息科学与技术03级3班科技创新小组1.研究意义现在的精密测量和精密加工中,环境因素是影响精度的主要因素之一,其中的温度、湿度是环境的两项主要指标。
当前,已经开发了很多温湿度测量系统,一些高精度温度传感器的精度可到±0.01℃,然而价格非常昂贵,一般只作为高分辨力的精度测量和用作测温仪器的标准。
而对于生产应用中的较低精度温湿度测量系统,现有的系统多采用了与计算机直接结合的工作模式,增加了系统的成本。
鉴于目前的情况,我们提出以价格低廉的单片机作为控制核心,以多个温度、湿度传感器作为测量元件,构成了低成本的智能温湿度测量系统。
在该系统中,根据测量空间或设备的实际需要,由多路温度、湿度传感器对关键温度点进行测量,由安装于仪器内的单片机对各路数据进行循环检测、存储,实现温、湿度的智能测量。
经初步预算,该系统的成本仅为数百元人民币,价格低廉。
另外,该系统具有与计算机的通讯功能,在长时间数据采集完成后,可以将数据在传送到计算机进行相关的研究分析。
因此,该系统即具有现有的计算机控制的智能测量功能,又节省硬件成本。
另外,我们所设计的智能温湿度测量系统外形尺寸小,即可用于实验室环境温度的测量,又可用于仪器、大型设备等的内部环境测量。
其功能如下:1.测量空间多点的温度和湿度:根据测量空间或设备的实际需要,由多路温度、湿度传感器对关键温、湿度敏感点进行测量,由安装于仪器内的单片机对各路数据进行循环检测、数据处理、存储,实现温湿度的智能、多空间点的测量。
2.长时间测量数据记录功能:可以根据需要设置数据记录时间间隔,数据存入数据存储器。
3.通讯功能:与计算机通讯功能,采用RS232串行通讯方式最远传输距离为20米。
采用此通讯方式成本低。
将采集的数据传入计算机,在Windows环境下通过对温湿度数据进行分析,得出空间温度场和湿度场的分布情况。
要求达到的技术指标:测温范围: -20℃~ 100℃测温精度:±0.1℃测湿范围: 0~100%RH测湿精度:±3.5%RH测量仪特点:1.长周期数据自动记录2.空间温度场、湿度场测量3. 精度较高4. 价格低廉2. 研究内容2.1 总体方案设计以单片机为控制核心,采用温湿度测量,通信技术,误差修正等关键技术,以温湿度传感器作为测量元件,构成智能温湿度测量系统。
智能仪器
2.1 整体设计方案的确定 综合考虑,本设计采用基于STC89C52单片机与 DS18B20温度传感器,其整体框架图如下。
DS18B20
单 片 机
数码管
按键
温度传感器DS18B20芯片介绍与运用 DS18B20具有结构简单、体积小、功耗小、抗干扰 能力强、使用方便等优点。由于18B20芯片送出的温 度信号是数字信号,因此简化了A/D转换的设计,提 高了测量效率和精度。
按 键 : 取 消 设 置
4.1 单片机模块 说明:该该部分硬件是单片机模块,如下图:
用DS 18B20作为测温元件,DS18B20采用电源 供电方式(如图),此时DS18B20的1脚接地,2脚作 为信号线P3.2,3脚接+5V电源。DS18B20处于写 存储器操作和温度A/D转换操作时,总线上必须有 强的上拉 。
智能型温度仪器测试仪课程设计 小组成员: xxx xxx xxx 指导老师: xxx
由林良存编写程序、画原理图。 由范岩斌做ppt。 由林煌兴收集资料、写报告。
引言 系统设计 硬件设计 软件设计 结论 结束语
温度是日常生活、工业、医学、环境保护、化工、石油等 领域最常遇到的一个物理量,也是工业控制中主要的被控 参数之一。对温度的测量在现代工业中也是运用的越来越 广泛。而传感器主要用于测量,它的性能好坏直接影响系 统的性能。因此,不仅必须掌握各类传感器的结构、原理 及其性能指标,还必须懂得传感器经过适当的接口电路调 整才能满足信号的处理、显示和控制的要求,而且只有通 过对传感器应用实例的原理和智能传感器实例的分析了解, 才能将传感器和信息通信与信息处理结合起来,适应传感 器的生产、研制、开发和应用。 DS18B20是美国DALLAS半导体公司继DS1820之后最新 推出的一种改进型智能温度传感器。与传统的热敏电阻相 比,他能够直接读出被测温度并且可根据实际要求,因而 使用DS18B20可使系统结构更趋简单,可靠性更高。他 在测温精度、转换时间、传输距离、分辨率等方面较 DS1820有了很大的改进,给用户带来了更方便的使用和 更令人满意的效果。
智能仪器智能温度测试仪的设计

智能仪器智能温度测试仪的设计智能仪器智能温度测试仪的设计1.引言1.1 目的本文档旨在介绍智能仪器智能温度测试仪的设计。
该仪器采用智能化技术,能够准确测量温度并进行数据分析和记录,以满足各种温度测试需求。
1.2 背景随着科技的发展,温度测试在工业、医疗、农业等领域中的重要性越来越被重视。
传统的温度测试仪器存在准确性、操作复杂等问题。
为了解决这些问题,本设计旨在开发一款智能化的温度测试仪器。
2.系统设计2.1 系统概述智能温度测试仪由硬件模块和软件模块组成。
硬件模块包括传感器、数据采集模块、数据分析处理模块和显示屏等部分;软件模块包括数据管理系统、用户界面和远程控制等部分。
2.2 硬件设计①传感器本设计采用高精度温度传感器,能够实时测量温度,并输出数字信号给数据采集模块。
②数据采集模块数据采集模块负责采集传感器输出的温度数据,并进行模数转换。
采集的数据将通过总线传输给数据处理模块。
③数据处理模块数据处理模块对采集到的温度数据进行处理和分析,并将结果保存到内部存储器中,以备后续查询和分析。
④显示屏显示屏用于展示实时温度、历史数据以及系统状态等信息,并提供用户操作界面。
2.3 软件设计①数据管理系统数据管理系统用于存储、查询和管理温度测试仪采集到的数据。
它提供了数据导入、导出、删除、备份等功能。
②用户界面用户界面提供给用户进行温度测试的操作界面和数据展示界面。
用户可以通过界面设定温度范围、采样频率等参数。
③远程控制远程控制功能使用户可以通过远程连接的方式,对温度测试仪进行远程控制和数据查询。
3.性能要求3.1 测量精度温度测试仪的测量精度要达到±0.1℃以内,以满足不同行业对温度测试的精度要求。
3.2 响应时间温度测试仪的响应时间应小于1秒,以便快速响应用户的操作并实现实时数据显示。
3.3 数据存储容量温度测试仪的数据存储容量应达到最少1000条数据,以满足长时间的数据记录需求。
4.法律名词及注释●智能温度测试仪: 一种具备智能化功能的温度测试设备,能够准确测量温度并进行数据分析和记录。
全智能测控仪使用说明

全智能测控仪的使用说明1. 仪器介绍全智能测控仪是一种先进的测量和控制设备,具有高精度、高效率和多功能的特点。
它可以用于各种领域的测量和控制任务,包括工业、实验室和家庭等。
该仪器使用了最新的数字技术,提供了准确、可靠的测量结果,并具有友好的用户界面。
2. 连接和安装在开始使用全智能测控仪之前,需要将其连接到相应的设备或系统上。
首先,确保所有的连接线缆和插头都正确地连接到仪器和外部设备上。
然后,将测控仪的电源线插入电源插座,并打开电源开关。
在安装过程中,确保仪器放置在平稳的表面上,并远离水源和高温环境。
3. 基本操作全智能测控仪具有直观的用户界面,使其易于操作。
在打开仪器后,你会看到一个液晶显示屏和一些控制按钮。
通过这些按钮,你可以选择不同的测量模式、调整参数和查看测量结果。
此外,还可以使用触摸屏或键盘来进行输入和操作。
4. 测量模式选择全智能测控仪支持多种测量模式,包括温度、压力、湿度、电流等。
要选择测量模式,你可以使用控制按钮或触摸屏上的菜单。
在选择模式之后,你可以根据需要进行进一步的设置和调整。
5. 参数设置在测量模式选择完成后,你可以根据你的需求进行参数设置。
例如,如果你想测量温度,你可以设置温度单位(摄氏度或华氏度)、测量范围和采样频率等。
这些参数可以通过控制按钮或触摸屏上的菜单进行调整。
6. 测量和控制一旦参数设置完成,你就可以开始进行测量和控制操作了。
全智能测控仪会根据你的设置自动采集数据,并显示在液晶显示屏上。
你可以通过监控屏幕上的数据变化来进行实时监测,并根据需要进行相应的控制操作。
7. 数据保存和导出全智能测控仪通常具有内置的存储功能,可以将测量数据保存在内部存储器或外部存储设备上。
你可以使用控制按钮或触摸屏上的菜单来设置数据保存的方式和格式。
另外,你还可以将数据导出到计算机或其他设备上进行进一步分析和处理。
8. 故障排除在使用全智能测控仪的过程中,可能会遇到一些故障或问题。
在这种情况下,你可以参考用户手册中的故障排除部分,找到解决问题的方法。
智能仪器课程设计报告(李林)
智能仪器设计课程设计报告―――基于DS18B20温度测量系统的设计学生姓名:李林学号:0701170118班级:07011701任课教师:石晓晶成绩:南京理工大学机械工程学院基于DS18B20温度测量系统的设计摘要:设计了一种数字化温度测量系统,其误差小于等于±0.5℃,具有3位数码显示(XX.X℃)和开机自检功能,并配有简单键盘,能够设置温度上、下限临界报警值设置并上位机通信。
关键字:DS18B20 ,温度测量,单片机引言 (4)1硬件电路设计 (5)1.1总体方案 (5)1.2 DS18B20介绍 (5)1.2.1 DS18B20的主要特征 (5)1.2.3 DS18B20的时序 (6)1.3 键盘控制设计 (7)1.4 共阴极LED显示控制设计 (8)1.5 复位电路的设计 (9)1.6 DS18B20测温电路的设计 (9)1.7 上位机通信电路 (10)2 软件编程设计 (11)2.1总体流程图 (11)2.2 主程序 (11)2.3 自检子程序 (12)2.4 上、下限温度值传送子程序 (13)2.5 键盘控制子程序 (14)2.6 DS18B20 复位子程序 (15)2.7 DS18B20写控制字子程序 (16)2.8 DS18B20读数据子程序 (16)2.12 数据表 (17)总结 (17)致谢 (18)参考文献 (19)附录1(电路图) (21)附录2(实物图) (20)在工业控制和生产自动化中,对于温度量的测量是十分重要的。
测量温度的方法多种,传统温度测量方法是通过温度敏感元件,将温度的测量转换成对电信号的测量,再通过调理电路和模—数转换后得到温度值。
本设计的温度测量系统,采用了Dallas公司的DS18B20型“一线总线”接口的数字化传感器,通过软件控制的方式,简化了硬件设计环节。
1硬件电路设计1.1总体方案本设计的总体思路为:以单片机为控制核心,采用动态扫描的LED显示方式,并采用查询的方式对按键进行扫描。
《智能仪器设计基础》试题及答案

《智能仪器设计基础》试题及答案一、判断题(每题 2 分,共20 分)1. 因中值滤波满足比例不变性,所以是线性的滤波器。
(2 )2. 基准电压Vr 的精度和稳定性影响零位误差、增益误差的校正效果。
(1)3. 测量获得一组离散数据建立近似校正模型,非线性校正精度与离散数据精度无关,仅与建模方法有关。
(2)4. RS232 通信采用的是TTL电平,因此它的传输距离比485 短。
(2)5. USB协议为设备定义了2种供电模式:自供电和总线供电。
在自供电模式下,USB设备不需要任何外接电源设备。
(2)6. LCD显示器有静态驱动和叠加驱动两种驱动方式,这两种驱动方式可在使用时随时改变。
(2)7. 智能仪器中的噪声与干扰是因果关系,噪声是干扰之因,干扰是噪声之果。
( 1)8. 软件开发过程的三个典型阶段是定义、开发和测试。
(2)9. RAM 测试方法中,谷值检测法无法检测“ 粘连” 及“ 连桥” 故障。
(2 )10.曲线拟合要求y=f(x )的曲线通过所有离散点(x i ,y i )。
(2)二、选择题(每题 2 分,共20 分)1. 多通道数据采集系统的框图如下图所示。
其中(1 )~(4 )各部分的组成为:(b )A. 放大器、A/D 转换器、D/A 转换器、计算机B. 多路开关、放大器、A/D 转换器、计算机C. 多路开关、放大器、D/A 转换器、计算机D. 放大器、多路开关、A/D 转换器、D/A 转换器2. 仪器采集数据中存在随机误差和系统误差,基本数据处理顺序是:(b )A. 系统误差消除→数字滤波→标度变换B. 数字滤波→系统误差消除→标度变换C. 标度变换→系统误差消除→数字滤波D. 数字滤波→标度变换→系统误差消除3. 设采集数据由信号加噪声构成,应根据( b )确定滤波算法?A. 噪声统计规律B. 信号特征和噪声统计规律C. 信号特征D. 只能用多种滤波算法试验,由处理效果确定。
4. 采样保持器的作用是( c )A. 提高系统的采样速率B. 保持系统的数据稳定C. 保证在A/D转换期间ADC前的模拟信号保持不变D. 使A/D 转换器前信号能跟上模拟信号的变化5. 采集数据中含有脉冲性干扰,信号为直流,则应选择( d )滤波算法。
红外线体温计使用方法
红外线体温计使用方法摘要:红外线体温测量是一种快速而准确的体温测量方法,比传统的温度计更加方便快捷。
本文首先介绍了红外线体温计的工作原理,接着介绍了市面上常见的类型及其特点,最后介绍了正确使用红外线体温计的一些准则,包括操作准备、使用方法、科学预防、安全注意等。
红外线体温计使用方法红外线体温测量可以快速准确地测量人体温度,大大减少了温度测量所需要的时间。
体温是人体健康判断的重要指标,在某些时候也是诊断疾病的重要依据。
红外线体温计是便携式的,测量结果可以在秒内由智能仪器直接显示出来,因此被大量用于医疗监测和科学研究中。
一、红外线体温测量原理红外线体温测量仪利用人体热量发射出来的热像技术,测量体表的温度。
它是一种非接触式测量,可以清晰地记录体温。
红外线体温测量仪可以检测到0.1度的温度变化,因此这种测量方法的灵敏度比传统的温度检测方法要高。
二、市面上常见的红外线体温计市面上现有的红外线体温计大致可分为一次性红外体温计和可重复使用型红外体温计。
一次性红外体温计不能重复使用,测量温度速度快,可以检测到正常体温和轻度发烧,是体温测量中普及最广的一种。
可重复使用型红外体温计比一次性红外有更高的精度,可以测出低于正常体温的低温,常用于营养缺乏等其它疾病的诊断。
三、正确使用红外线体温计的一些准则1.操作准备:在使用红外线体温计之前,首先应该确认被测量者的安全情况和体温的情况,检查测量仪器是否安装正确,电池是否充足。
2.使用方法:被测量者应取消头部的附件,如帽子,发圈等,然后将体温计的探头置于头部不遮挡眼睛的位置,一旦读数收敛,即可完成测量。
3.科学预防:应通过定期体温检测,注意调节好作息、饮食习惯,以及每日保持良好的卫生习惯,及时发现疾病并得到有效治疗,从而达到预防疾病的目的。
4.安全注意:使用红外线体温计的时候,请不要将探头急速移动,以免造成误差。
此外,应将体温计放置在安全的地方,妥善保管,以免造成意外。
综上所述,红外线体温测量是一种快速准确的测量方法,有利于及时发现疾病,检查体温反应情况,在医疗保健、科学研究等诸多领域都被广泛应用。
温度计的工作原理及应用领域分析
温度计的工作原理及应用领域分析商业计划书1. 概述本商业计划书旨在分析温度计的工作原理及其在不同应用领域中的潜在商机。
温度计是一种广泛应用于各行各业的测量工具,具有重要的商业价值和市场需求。
2. 温度计的工作原理温度计是一种用于测量温度的仪器,其工作原理基于物体的热胀冷缩性质。
常见的温度计包括水银温度计、电子温度计和红外线温度计等。
3. 温度计的应用领域分析3.1 医疗行业温度计在医疗行业中起着至关重要的作用。
医院、诊所和家庭常备的体温计用于测量人体体温,帮助判断患者是否发热,从而进行疾病诊断和治疗。
随着医疗技术的不断进步,越来越多的智能温度计出现在市场上,可以通过蓝牙或Wi-Fi与手机或电脑连接,实现数据的实时监测和远程管理。
3.2 工业领域温度计在工业领域中广泛应用于温度监测和控制。
在制造业中,温度是一个重要的工艺参数,对于保证产品质量和生产效率至关重要。
温度计可以用于监测和控制炉温、热处理过程、冷却液温度等,以确保工艺的稳定性和一致性。
3.3 环境监测温度计在环境监测中也扮演着重要的角色。
例如,气象站使用温度计来测量气温,提供准确的天气数据。
同时,温度计也可以应用于农业领域,监测土壤温度、水温等,为农作物的种植和养殖提供科学依据。
3.4 食品安全温度计在食品安全领域中具有重要的应用价值。
食品加工和储存过程中,温度是一个关键因素,过高或过低的温度可能导致食品变质和细菌滋生。
温度计可以用于监测食品的温度,确保食品的安全性和质量。
4. 市场需求和商业机会温度计作为一种基础工具,在各个行业中都有广泛的市场需求。
随着科技的进步和应用领域的扩大,温度计的需求将继续增长。
尤其是智能温度计的出现,为温度监测和控制提供了更便捷、准确和可靠的解决方案。
在市场竞争激烈的情况下,温度计制造商和供应商应该注重产品的创新和差异化。
例如,开发具有更高精度、更长寿命、更便携、更智能化的温度计,以满足不同行业和用户的需求。
智能温度控制仪使用说明书.
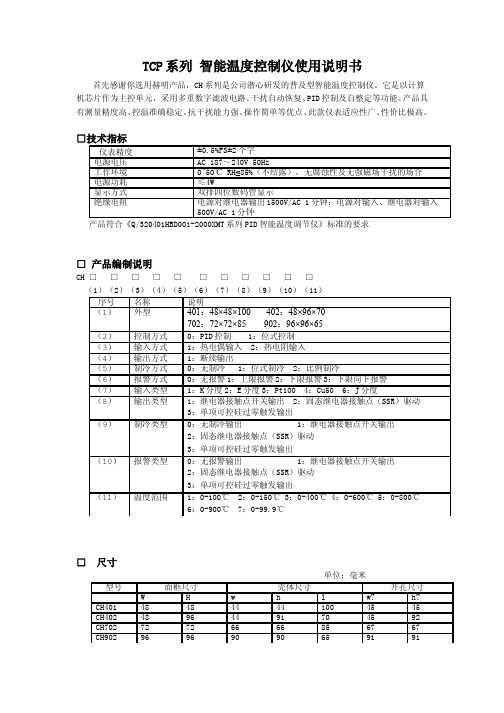
TCP系列 智能温度控制仪使用说明书首先感谢你选用赫明产品,CH系列是公司潜心研发的普及型智能温度控制仪。
它是以计算机芯片作为主控单元,采用多重数字滤波电路、干扰自动恢复、PID控制及自整定等功能。
产品具有测量精度高、控温准确稳定、抗干扰能力强、操作简单等优点、此款仪表适应性广、性价比极高。
产品符合《Q/320401HBD001-2000XMT系列PID智能温度调节仪》标准的要求□ 产品编制说明CH □ □ □ □ □ □ □ □ □ □ □(1)(2)(3)(4)(5)(6)(7)(8)(9)(10)(11)□ 尺寸单位:毫米□ 面板各部分说明1、设定键2、左移键3、设定值加键4、设定值减键5、设定值窗口6、采样值窗口7、输出指示灯 8、报警1指示灯 9、报警2指示灯□操作1、在PID参数设定方式,每按一次(SET)键,将按顺序显示下表参数,但是根据订货规格,有些参数可能不出现,初始值也可能有所不同。
2、如需位式控制,请修改下列参数为Pv=0 Dv=下回差值,SPv=0(无需回差值,则Dv=0)2、自整定的准确使用控温精度对仪表而言关键是PID的参数要选择合理,但由于各种加热对象差异很大,PID参数也相差甚大,对非专业人士,可以通过自整定来达到较为理想的控温较果。
在参数自整定之前,先确定该控制系统是否允许在位式控制状态下(控制量是0%或100%)工作,若不允许,PID参数就须采用手工设置。
本仪表自整定的专家经验公式是根据自整定启动后的两次过冲幅值及自整定过程所用的时间经过运算后得出来的,因此启动自整定时测量值越是小于设定值,则自整定的效果越理想。
自整定过种中不要有异常的扰动(如负载的变化,打开箱门)和修改相关的参数(如测量值)的情况。
自整定给出的参数在某些情况下可能并不是最佳的,因此用户在某些使用过程中还须在此基础上进一步修改。
3、PID参数的手工整定当系统因环境温度变化很多或系统本身的差别造成系统控温达不到使用要求时,可依以下几种情况对PID参数进行调节,以达到使用要求:a)当系统在比例带范围内加热很少而又要冲温时,应增大比例带P。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《智能仪器》实验报告实验项目温度测量实验时间同组同学班级11111学号1111111姓名111112014年4月实验二温度测量一、实验目的了解常用的集成温度传感器(AD590)基本原理、性能;掌握测温方法以及数据采集和线性标度变换程序的编程方法。
二、实验仪器智能调节仪、PT100、AD590、温度源、温度传感器模块,传感器实验箱(一);“SMP-201 8051模块”、“SMP-204 块块模块”、“SMP-101 8位A/D模块”、“SMP-401 块块块示模块”。
三、实验原理集成温度传感器AD590是把温敏器件、偏置电路、放大电路及线性化电路集成在同一芯片上的温度传感器。
其特点是使用方便、外围电路简单、性能稳定可靠;不足的是测温范围较小、使用环境有一定的限制。
AD590能直接给出正比于绝对温度的理想线性输出,在一定温度下,相当于一个恒流源,一般用于-50℃-+150℃之间温度测量。
温敏晶体管的集电极电流恒定时,晶体管的基极-发射极电压与温度成线性关系。
为克服温敏晶体管U b电压生产时的离散性、均采用了特殊的差分电路。
本实验仪采用电流输出型集成温度传感器AD590,在一定温度下,相当于一个恒流源。
因此不易受接触电阻、引线电阻、电压噪声的干扰,具有很好的线性特性。
AD590的灵敏度(标定系数)为1 A/K,只需要一种+4V~+30V电源(本实验仪用+5V),即可实现温度到电流的线性变换,然后在终端使用一只取样电阻(本实验中为传感器调理电路单元中R2=100Ω)即可实现电流到电压的转换,使用十分方便。
电流输出型比电压输出型的测量精度更高。
在实验一的基础上进行电压测量、标定、线性变换,最后显示出对应温度。
图2-1 温度传感器模块原理图四、实验内容与步骤1.参考“附录实验PT100温度控制实验”,将温度控制在500C,在另一个温度传感器插孔中插入集成温度传感器AD590。
2.将±15V直流稳压电源接至实验箱(一)上,温度传感器实验模块的输出Uo2接实验台上直流电压表。
3.按图2-1接线,并将AD590引线的红色端接“温度传感器模块”的a1,蓝色端接“温度传感器模块”的b1,并从实验台上接+5V 电源到a1端。
调节RW2大约在中间位置,用实验台上“直流电压表”的20V 档测量“温度传感器模块”的“Uo2”端,再调节电位器Rw1使直流电压表显示为零。
5.按照图将信号引到差动放大器的输入Ui ,记下模块输出Uo2的电压值。
6.升高温度源的温度每隔50C 记下Uo2的输出值。
直到温度升至1200C 。
并将实验结果填入表2-1。
7.按照实验1的1-5步骤搭建单片机AD 转换电路,将模块输出电压Uo2接入到“SMP-101 8位AD 块块模块”的CH0;8.编写数据采集程序及标度变换程序,并进行调试,检验程序的测量结果是否与温度源给定的温度一致。
(数据采集程序及硬件电路参考“实验一”的结果,线性标度变换公式参考教材中的“标度变换”一节)五、实验报告1.由记录的数据数据计算在此范围内整个测温系统的灵敏度,并画出标定出的拟合直线。
(端基法)表2-1 温度与输出电压关系T Uo2V (℃())384552596673801.387 1.419 1.45 1.483 1.515 1.548 1.581T (℃) 384552596673808794101108115Uo2(V )1.387 1.419 1.450 1.483 1.515 1.548 1.581 1.612 1.645 1.678 1.710 1.7422.由表2-1记录的数据计算在此范围内集成温度传感器的非线性误差。
K=(1.742-1.387)/(115-38)=0.0046所以y=0.0046*x+1.2122V1=0V2=0.0002V3=0.0014V4=0.0006V5=0.0008V6=0V7=0.0080V8=0.0004V9=0.0016V10=0.0012V11=0.0010V12=0所以最大误差为:0.0016非线性误差=0.0016/1.742*100%=0.09% 3.画出程序流程图。
开始初始化AD转换器结束4.用c语言编制实验程序。
主程序:#include <c8051f020.h> // SFR declarations#include <stdio.h>#include "Delay.h"#include "AD774.h"//-----------------------------------------------------------------------------// 16-bit SFR Definitions for 'F02x//-----------------------------------------------------------------------------sfr16 DP = 0x82; // data pointersfr16 TMR3RL = 0x92; // Timer3 reload valuesfr16 TMR3 = 0x94; // Timer3 countersfr16 ADC0 = 0xbe; // ADC0 datasfr16 ADC0GT = 0xc4; // ADC0 greater than windowsfr16 ADC0LT = 0xc6; // ADC0 less than windowsfr16 RCAP2 = 0xca; // Timer2 capture/reloadsfr16 T2 = 0xcc; // Timer2sfr16 RCAP4 = 0xe4; / Timer4 capture/reloadsfr16 T4 = 0xf4; // Timer4sfr16 DAC0 = 0xd2; // DAC0 datasfr16 DAC1 = 0xd5; // DAC1 data//-----------------------------------------------------------------------------// Global CONSTANTS//-----------------------------------------------------------------------------#define BAUDRATE 115200 // Baud rate of UART in bps#define SYSCLK 22118400//11059200 // SYSCLK frequency in Hz#define SAMPLE_RATE 50000 // Sample frequency in Hz #define INT_DEC 256 // integrate and decimate ratio//sbit AD_BUSY = P3^5;sbit AD_BUSY = P1^6;//-----------------------------------------------------------------------------// Function PROTOTYPES//-----------------------------------------------------------------------------void SYSCLK_Init (void);void PORT_Init (void);//-----------------------------------------------------------------------------// Global V ARIABLES//-----------------------------------------------------------------------------long result; // ADC0 decimated value//-----------------------------------------------------------------------------// MAIN Routine//-----------------------------------------------------------------------------void main (void){unsigned char high8,low4;unsigned char HIGH4,LOW8;unsigned char i=0;unsigned char add=0;unsigned char j=0; // temperature WDTCN = 0xde; // disable watchdog timer WDTCN = 0xad;SYSCLK_Init (); // initialize oscillatorPORT_Init (); // initialize crossbar and GPIO// sample rateHIGH4 = 0x00;LOW8 = 0x00;AD_BUSY = 1;//选择并设置多路开关的通道为第1 号通道SET_PGA(0x00); //选择并设置程控放大器的放大倍数为1while(1){SET_PLUS(0x00+2*0x20);AD_START(); //启动AD转换while(AD_BUSY); //等AD转换完if(!AD_BUSY) //若转换完,则读转换后的数字量{high8 = RD_ADDA TA_H8(); //读高8位(D7~D4D11~D8)low4 = RD_ADDATA_L4(); //读低4位(D3~D0)}HIGH4 = high8 & 0x0f; // (0000D11~D8)-> HIGH4LOW8 = (high8 & 0xf0)|(low4 & 0x0f);//(D7~D4D3~D0)-> LOW8//P2 = HIGH4;//P3 = LOW8;result=HIGH4*256+LOW8;result=HIGH4*256+LOW8;Delay_ms(255);}}}//-----------------------------------------------------------------------------// Initialization Subroutines//-----------------------------------------------------------------------------//-----------------------------------------------------------------------------// SYSCLK_Init//-----------------------------------------------------------------------------//// This routine initializes the system clock to use an 22.1184MHz crystal// as its clock source.void SYSCLK_Init (void){int i; // delay counterOSCXCN = 0x67; // start external oscillator with// 22.1184MHz crystalfor (i=0; i < 256; i++) ; // XTLVLD blanking interval (>1ms)while (!(OSCXCN & 0x80)) ; // Wait for crystal osc. to settleOSCICN = 0x88; // select external oscillator as SYSCLK// source and enable missing clock// detector}//-----------------------------------------------------------------------------// PORT_Init//-----------------------------------------------------------------------------//// Configure the Crossbar and GPIO ports//void PORT_Init (void){XBR0 = 0x04; // Enable UART0XBR1 = 0x00;XBR2 = 0x40; // Enable crossbar and weak pull-upsP1MDOUT = 0xff; // enable P1.6 (LED) as push-pull output P2MDOUT = 0xff; // enable P1.6 (LED) as push-pull output P3MDOUT = 0xff; // enable P1.6 (LED) as push-pull output P74OUT = 0xff; //设置P4-P7口输出EMI0CF=0x2f; //外部存储器接口EMI0TC=0x9e; //外部存储器时序控制延时程序:#include "c8051F020.h"#include <intrins.h>#include "delay.h"/****************************************************************************** ******//****************************************************************************** ****** 函数名称:Delay_us;** 函数功能描述:延时n微秒子函数;** 输入参数:延时时间(单位微秒);** 返回数据:none;** 注意:none;******************************************************************************* *****/void Delay_us(unsigned char Times){unsigned char i;for (i=0; i<Times; i++){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}}/****************************************************************************** ****** 函数名称:Delay_us;** 函数功能描述:延时n毫秒子函数;** 输入参数:延时时间(单位毫秒);** 返回数据:none;** 注意:none;******************************************************************************* *****/void Delay_ms(unsigned char Times){unsigned char i;for (i=0; i<Times; i++){Delay_us(250);Delay_us(250);Delay_us(250);Delay_us(250);}}/****************************************************************************** ****** 函数名称:Delay_us;** 函数功能描述:延时n秒子函数;** 输入参数:延时时间(单位秒);** 返回数据:none;** 注意:none;******************************************************************************* *****/void Delay_s(unsigned char Times){unsigned char i;for (i=0; i<Times; i++){ Delay_ms(250);Delay_ms(250);Delay_ms(250);Delay_ms(250);}}附加程序:#include <c8051f020.h> // SFR declarations//=========================================================//========================================================= #define PLUS_ADDR 0x8c00#define PGA_ADDR 0x8b00#define AD_START_ADDR 0x8d00#define RD_H8_DATA_ADDR 0x8e00#define RD_L4_DA TA_ADDR 0x8f00unsigned char xdata *PLUS_POINT = (unsigned char *)PLUS_ADDR; unsigned char xdata *PGA_POINT = (unsigned char *)PGA_ADDR;unsigned char xdata *AD_POINT = (unsigned char *)AD_START_ADDR; unsigned char xdata *RD_H8_POINT = (unsigned char *)RD_H8_DATA_ADDR; unsigned char xdata *RD_L4_POINT = (unsigned char *)RD_L4_DATA_ADDR;//=========================================================//========================================================= //入口参数:一个多路开关参数//出口参数:无//功能:根据所给的开关参数打开相应的开关void SET_PLUS(unsigned char i){*PLUS_POINT = i;}//=========================================================//========================================================= //入口参数:一个增益参数//出口参数:无//功能:根据所给的增益参数设置相应的放大倍数void SET_PGA(unsigned char i){*PGA_POINT = i;}//=========================================================//========================================================= //入口参数:无//出口参数:无//功能:启动AD转换void AD_START(void){*AD_POINT = 0x00;}//=========================================================//========================================================= //入口参数:无//出口参数:AD转换结果的高8位数//功能:读AD转换结果的高8位数unsigned char RD_ADDA TA_H8(void){unsigned char i;i = *RD_H8_POINT;return(i);}//=========================================================//========================================================= //入口参数:无//出口参数:AD转换结果的低4位数//功能:读AD转换结果的低4位数unsigned char RD_ADDA TA_L4(void){unsigned char i;i = *RD_L4_POINT;return(i);}5.调试结果分析硬件连接图:当显示的温度为115度时,此时电压表上显示的数值为1.742V ,而通过AD转换后受输出的result为3024.根据上次实验可以算出3042所对应的电压值为2.42V,远远大于了电压表上显示的1.742V,所以说明误差特别大。