壁虎运动反力和行为的动态同步表示方法
动物的运动和行为知识点总结

动物的运动和行为知识点总结一、动物的运动方式动物的运动方式多种多样,根据不同的物种和环境,它们采用了各种不同的运动方式。
1. 行走:大多数陆生动物都能够通过四肢的运动来行走。
例如,狗、猫、狮子等四肢动物都是通过行走来移动的。
2. 跳跃:一些动物,如青蛙和袋鼠,通过后肢的弹力来进行跳跃。
它们的后肢肌肉发达,能够产生强大的力量,从而实现迅速的跳跃。
3. 飞行:鸟类和昆虫是唯一能够自由飞行的动物。
它们通过翅膀的振动产生升力,从而在空中飞行。
4. 游泳:水生动物,如鱼类、海豚和海龟,通过身体的形状和鳍、鳃等特殊器官来在水中游泳。
5. 爬行:爬行动物,如蛇和蜥蜴,通过腹部的鳞片和肌肉的运动来爬行。
二、动物的行为表现动物的行为表现是它们对外界刺激做出的反应,它们的行为可以反映出它们的生存需求、社交关系和繁殖行为等。
1. 捕食行为:捕食行为是动物为了获取食物而展示的行为。
例如,猎豹会利用其敏捷的身体和快速的奔跑能力来追捕猎物。
2. 社交行为:动物之间存在着各种各样的社交行为,包括求偶、争斗、合作等。
例如,狮子会通过咆哮来维护自己的领地和社会地位。
3. 繁殖行为:动物的繁殖行为是为了繁衍后代而展示的行为。
不同的物种有不同的繁殖行为方式,例如,鸟类会筑巢、孵蛋,哺乳动物会进行交配和哺育幼崽等。
4. 迁徙行为:一些动物会根据季节和资源的变化而进行迁徙。
例如,候鸟会根据气候的变化选择合适的栖息地,进行长途迁徙。
5. 学习行为:一些动物具有学习能力,能够通过经验和观察来改变自己的行为。
例如,猴子可以通过模仿其他猴子的行为来学习新的技能。
总结:动物的运动方式和行为表现多种多样,它们适应了不同的生存环境和生活方式。
通过了解动物的运动方式和行为表现,我们可以更好地理解它们的生态习性和生存策略,为保护和研究动物提供参考和指导。
八年级生物动物的运动和行为知识点

八年级生物动物的运动和行为知识点
以下是八年级生物中关于动物的运动和行为的一些知识点:
1. 动物的运动方式:
- 游泳:水生动物如鱼、鲸等利用泳鳍或鳍状肢体在水中移动。
- 水平爬行:蛇、蜥蜴等动物通过腹面与地面接触来进行水平爬行。
- 垂直爬行:蜘蛛等动物利用特殊的器官或附着结构垂直爬行。
- 跳跃:草h企鹅、青蛙等动物通过强力腿部肌肉的收缩来进行跳跃。
- 飞行:鸟类、昆虫等动物通过翅膀的扇动来实现飞行。
2. 动物的导航和迁徙:
- 借助地标:动物常常利用地标如山脉、河流等作为引导,实现导航。
- 嗅觉和视觉:动物利用嗅觉和视觉的感知来识别和记忆环境和路线。
- 地磁感应:一些动物如候鸟、海龟等能够感应地球的磁场来确定方向。
- 内部钟表:动物可能拥有内部钟表来感知时间,辅助导航和迁徙。
3. 动物的行为:
- 群居行为:某些动物如蚂蚁、蜜蜂组成群体,每个个体扮演不同的角色,共同协作以获得更好的生存效益。
- 进化行为:一些动物通过物种的进化发展出特定的行为以适应环境,如迷彩、攻击和防御等。
- 社交行为:动物通过展示行为如打招呼、领地争夺、婚配等来交流和维护社交关系。
- 孵卵和育儿行为:某些动物如鸟类、哺乳动物表现出孵卵和照顾幼崽的行为。
这些知识点是关于八年级生物学中动物运动和行为方面的一些基本知识点,你可以进一步深入学习这些内容并进行拓展。
壁虎的生物学

壁虎在医学领域的应用价值
壁虎具有一定的药用价值,其干燥全 体可入药,具有祛风、活络、散结等 功效。
现代医学研究还发现,壁虎具有抗肿 瘤、抗病毒等药理作用。
壁虎可用于治疗中风瘫痪、风湿关节 痛、骨髓炎、淋巴结结核等疾病。
壁虎作为宠物及观动物
壁虎因其独特的形态和习性,逐 渐成为人们喜爱的宠物之一。
行。
壁虎的特点包括扁平的身体、大 大的眼睛、灵活的尾巴和脚趾上
的粘附鳞片。
壁虎的分布与生态环境
壁虎广泛分布于全球各地,从 热带雨林到沙漠地区都有它们 的踪迹。
它们通常栖息在建筑物的缝隙 、墙壁、树木和岩石等地方, 以适应不同的生态环境。
壁虎的分布范围与其对环境的 适应能力密切相关,不同的壁 虎种类在生态环境上有所偏好 。
家庭饲养壁虎可以观察其捕食、 蜕皮等生活习性,增加生活乐趣
。
在动物园、昆虫馆等场所,壁虎 也常作为观赏动物展出,供游客
参观学习。
05 壁虎的保护与生 态意义
壁虎面临的威胁与挑战
栖息地丧失
城市化、农业扩张等导致壁虎自 然栖息地不断减少。
环境污染
化学农药、杀虫剂等的使用对壁虎 生存环境造成污染。
非法捕捉与贸易
壁虎却趁机溜走。
内部器官与系统功能
呼吸系统
壁虎通过肺进行呼吸,需要较 高的氧气含量。
消化系统
壁虎的消化系统包括口腔、食 道、胃、小肠和大肠等部分, 用于消化食物和吸收营养。
循环系统
壁虎的心脏为二心房一心室, 属于不完全的双循环,负责将 氧气和营养物质输送到全身各 个部位。
排泄系统
壁虎通过肾脏和泄殖腔进行排 泄,排除体内的代谢废物。
粘附能力
壁虎的脚趾具有强大的粘 附能力,可以在垂直或倒 立的表面上轻松爬行和捕 食。
动物运动行为知识点总结

动物运动行为知识点总结动物运动行为是动物生活中非常重要的一部分,它涉及到动物的生存、繁衍和生活方式等方面。
动物运动行为的研究可以帮助我们更好地了解动物的生活习性,从而为人类保护动物、合理开发利用自然资源提供重要参考。
下面将就动物运动行为的相关知识点进行总结,以便加深我们对动物生活习性的了解。
一、动物运动行为的定义和分类1. 动物运动行为的定义:动物运动行为是动物为了生存、繁衍、避免危险等目的而进行的各种活动,包括飞行、游泳、奔跑、攀爬等。
2. 动物运动行为的分类:根据动物在不同环境中的运动方式,可以将动物运动行为分为陆地运动行为、水域运动行为和空中运动行为三类。
1)陆地运动行为:指动物在陆地上进行的各种运动活动,如奔跑、跳跃、攀爬等。
例如,猎豹奔跑时的速度可以达到每小时约110公里,是陆地上速度最快的哺乳动物之一。
2)水域运动行为:指动物在水中进行的各种运动活动,如游泳、潜水等。
例如,海豚擅长游泳和潜水,能在水中高速游动和做各种花样动作。
3)空中运动行为:指动物在空中进行的各种运动活动,如飞行、滑翔等。
例如,鸟类和昆虫能够利用翅膀在空中飞行,并以此方式觅食、躲避天敌等。
二、动物运动行为的适应性和进化意义1. 动物运动行为的适应性:动物的运动行为通常与其生存环境和生活方式具有密切关系,是对生存环境和生活方式的适应性反映。
例如,猎豹的奔跑速度快、灵活性强,使其能够在草原上猎捕瞬间,确保生存。
2. 动物运动行为的进化意义:动物的运动行为在漫长的生物进化过程中逐渐形成并逐步完善,对动物种群的生存繁衍具有重要的意义。
例如,海豚通过游泳和潜水捕食,不仅能够获取食物,还能够锻炼身体,提高繁衍后代的机会。
三、动物运动行为的调节和控制1. 神经调节:动物的运动行为通常受大脑和神经系统的调节和控制。
例如,猎豹在进行猎捕时,大脑会释放出大量的肾上腺素,使其肌肉迅速充血,提高肌肉张力和反应速度,从而保证猎物的捕获。
2. 内分泌调节:动物的内分泌系统也能够对运动行为进行调节和控制。
《壁虎仿生材料》PPT课件

1.1壁虎的吸附机制
01
粘液说?
壁虎的脚底根本不存在腺体
02
吸盘说?
壁虎放在玻璃罩子里,然后把玻璃 罩里的空气抽走,结果壁虎仍然可 以爬上垂直的玻璃
03
静电说?
使用x射线轰击靶材消除静电 引力后,在离子化的条件下刚 毛仍然能够实现粘附。
·
04
范德华力?!
1.1壁虎的吸附机制
范德华力?!
假设为范德华力:壁虎脚部的粘附力随着所接触基底的表面能的增 加而增加,Kellar Autumn等人利用单根刚毛的粘附力,使用JKR模
2.仿壁虎粘附阵列的设计与制造
2.1仿壁虎粘附阵列的设计
仿壁虎粘附阵列的设计应使其具有较强的粘附力、可控制脱离、能适 应不同粗糙度的表面、自洁性和耐久性。
Gaurav J Shah等人将 壁虎的层状阵列简化为 图所示的模型,其中 L为nm级绒毛的长度; a为绒毛半径; w为绒毛间距; θ为绒毛倾角。
型对抹刀形顶端的半径进行了近似估计,结果为0.13~0.16 um, 与实验测量值很接近。
他们使用两种不同的疏水性聚合物(硅树脂橡胶和聚酯树脂)制造了仿壁
虎的绒毛结构,并测量其与AFM探针间的粘附力,发现47%~63% 的粘附力都是由范德华力提供的。在这几种主要证据的支持下,范
德华力被普遍认为是壁虎实现粘附的主要机理。[1]
本模板的所有素材和逻辑 图表,均可自由编辑替换 和移动。
1.1壁虎的吸附机制
Kellar Autumn等人利用MEMS技术制造的高精度二维压阻悬臂梁测量了壁虎单根刚毛的粘附 力,最大值为194+25 uN 。所有刚毛同时粘附并达到最大值时,壁虎的脚掌可产生约1300 N 的粘附力。[1]
1.2壁虎的脱离机制
壁虎玻璃上行走原理
壁虎玻璃上行走原理壁虎是一种具有特殊行走能力的爬行动物,它们能够在垂直、倾斜或者倒置的表面上自由自在地行走。
这种令人称奇的行走能力主要得益于壁虎脚底的特殊结构和生物力学原理。
壁虎的脚底有数以百计的微小鳞片,这些鳞片中的每一个都覆盖着微小的毛发,这种鳞片和毛发的结合使得壁虎脚底能够与平滑表面产生分子间吸附力。
这些鳞片和毛发细小的结构,使之能够充分利用范德华力、毛发力和干粘附力,从而使壁虎能够牢牢地附着在玻璃或其他表面上。
在壁虎的脚底鳞片以及鳞片上的毛发中,存在一种特殊的结构,称为扇形结构。
这种结构将脚底鳞片分割成了许多微小的区域,每个区域中都有众多的毛发。
这些毛发的末端形成了一个刚度递增的三维结构,这就产生了一个类似于开放式扇形的形状。
这种扇形结构可以增加壁虎与表面之间的接触面积,提高附着力,从而使壁虎能够在垂直表面或倾斜表面上行走。
在壁虎行走时,它们的脚底鳞片和毛发会与表面形成一个密实的接触网络,这种网络能够在壁虎行走时保持稳定。
当壁虎移动脚部时,脚底鳞片和毛发会形成一个密闭的接触区域,从而增加了壁虎与表面之间的附着力。
当壁虎移动一条腿时,它的其他腿会保持在原位,这样可以保持稳定的附着力,不至于使整个身体滑落。
另外,壁虎行走时的步态也对其行走能力起到了重要的作用。
壁虎在行走时采用了一种称为交替式移动的步态,即前腿和后腿交替推动身体前进。
这种步态使得壁虎能够保持平衡,并且减少了附着力的变化,从而使壁虎能够稳定地在垂直或倾斜表面上行走。
总结起来,壁虎能够在玻璃等表面上行走的原理主要包括鳞片和毛发的微小结构、扇形结构的特殊形状、接触区域的附着机制以及交替式移动的步态。
这些特殊的结构和行走方式使得壁虎能够在各种表面上行走,展现出令人惊异的行走能力。
【初二学习指导】人教版初二上册生物第五单元第二章知识点:动物的运动和行为
【初二学习指导】人教版初二上册生物第五单元第二章知识点:
动物的运动和行为
知识点对朋友们的学习非常重要,大家一定要认真掌握,生物网为大家整理了人教版
初中第二天
上册生物第五单元第二章知识点:动物的运动和行为,让我们一起学习,一起进步吧!
1.动物行为:孔雀打开屏幕,鹤跳舞,鹅向南飞,蜜蜂采蜜
不是动物的行为有:肠胃的蠕动心脏的跳动血液的流动
2.动物有各种各样的动作。
(一)动物的运动
1.哺乳动物的运动系统由骨骼和肌肉组成。
2、每一组肌肉的两端分别附着在不同骨上,与骨相连的肌肉总是由两组肌肉相互配
合活动的。
例如:屈肘时,肱二头肌收缩,肱三头肌舒张,伸肘时则相反。
(课本p30图
v-1617)
4.关节头从关节窝滑脱称为脱位。
5、运动并不仅靠运动系统,还需要神经系统的控制和调节,以及消化系统、呼吸系统、循环系统供应能量。
只要你以这种方式完成你的日常计划和小目标,你就可以自由地应对新的学习,实现你的长期目标。
《人民教育版》第1卷,第2卷,生物学,第5单元,第2章知识点:动物运动和行为,祝你们学习愉快!。
各种动物的运动和行为

海星通过管足的伸缩来实现运动。
水螅
它们特殊的活动方式 之一是翻筋斗,即以 触手代足足跟右边前后的两 只足合为一组,每次运动 是三只足落地,也就是 「左一右二」移动一次, 「左二右一」再移动一次, 这样左右交换爬行。
多足动物如:蜈蚣、马陆,它们爬行时每只 在它前面的足活动后接触地面一下,所以足 的移动好像弹钢琴时按键的程序。
乌贼鱿鱼水母扇贝类等以其身体躯干的特殊造将水向后喷出将生物能转化成动能前昆虫爬行时它左边中间的一只足跟右边前后的两只足合为一组每次运动是三只足落地也就是左一右二移动一次左二右一再移动一次这样左右交换爬行
海蜇、水母的身体 能在海面漂浮,随波逐流
乌贼、鱿鱼、水母、扇 贝类等以其身体躯干的 特殊造,将水向后喷出, 将生物能转化成动能前 进。
多足动物的爬行
袋鼠的跳跃
袋鼠的后肢特别强壮, 就象两根弹簧,极利于跳 跃。它的跳跃本领极高, 不仅能连续跳跃前进,而 且一蹦就可达9米
飞魚的行动也近于滑翔﹐当 在水內加速窜出水面时﹐翼 狀胸鳍和臀鳍相继外展﹐借 风浮起﹐可滑行数十米。
鼯鼠四肢间有皮肤膜 相连,可以滑翔。
蚂蚁搬家
蜜蜂采蜜
刚出生的小袋鼠掉在母袋鼠的 尾巴根部,它可以靠本能爬向母 袋鼠腹部的育儿袋,从育儿袋中 吃奶。
一、取食行为
动物要生存,就必须不断地从外界 获取食物。
举例:蟒蛇吞蛋、狮子捕获斑马、黑 猩猩用工具挖取白蚁等。
招潮蟹颜色鲜艳的螯肢 乌贼喷出墨汁
壁虎研究报告

壁虎研究报告壁虎是一种常见且广泛分布于世界各地的爬行动物。
它们属于有鳞目、壁虎科,是一类小型爬行动物。
壁虎通常以昆虫和其他小型无脊椎动物为食,它们能够在垂直的表面上爬行,并具有很强的附着能力。
本报告将对壁虎的生物特性、栖息地、行为习性以及保护动物等方面进行研究。
一、生物特性:1. 外貌:壁虎一般体型较小,身体通常呈扁平状,覆盖有鳞片。
它们的四肢相对较长,指、趾末端有爪。
壁虎通常具有独特的皮肤颜色和斑纹,有的可以进行伪装。
2. 运动方式:壁虎拥有强大的附着能力,可以在垂直的表面上自由爬行,甚至能够在天花板上行走。
这得益于它们脚掌底部具有微小而且丰富的吸盘结构。
3. 繁殖方式:壁虎是卵生动物,通常通过产卵的方式繁殖。
雄性壁虎通常会与多个雌性壁虎交配,繁殖季节视地理环境而异。
二、栖息地:壁虎在全球各地都有分布,不同物种的壁虎适应不同的生境。
它们可以在森林、草原、沙漠、城市及家庭等各种环境中栖息。
壁虎通常喜欢隐藏在树木、石头或建筑物的裂缝中。
三、行为习性:1. 食性:壁虎以昆虫和其他小型无脊椎动物为食,包括蚊子、苍蝇、蜘蛛、蟑螂等。
它们捕食能力强,能够有效地控制害虫数量。
2. 活动时间:壁虎通常是夜行性动物,白天往往隐藏在树木或建筑物的暗处,晚上才出来觅食。
3. 社会行为:壁虎通常是孤独生活的动物。
当遇到威胁时,它们会通过扩大身体、摇尾巴和发出声音来警告对手。
四、保护动物:由于栖息地破碎化、非法捕捉、污染和气候变化等原因,壁虎的数量逐渐减少。
因此,保护壁虎和其栖息地变得非常重要。
采取以下措施可以帮助保护壁虎:1. 宣传教育:增加公众对壁虎的认识和保护意识,促进人们对其生存环境的尊重和保护。
2. 管理保护区:建立壁虎保护区,保护其栖息地,禁止非法猎捕和买卖壁虎。
3. 研究保护:加强壁虎的生态学研究,了解其栖息地变化和对外界环境的适应能力。
通过对壁虎进行深入研究和保护,有助于维护生态平衡,并且保护壁虎所在生态系统中的多样性。
兽类、飞禽、爬行动物运动规律
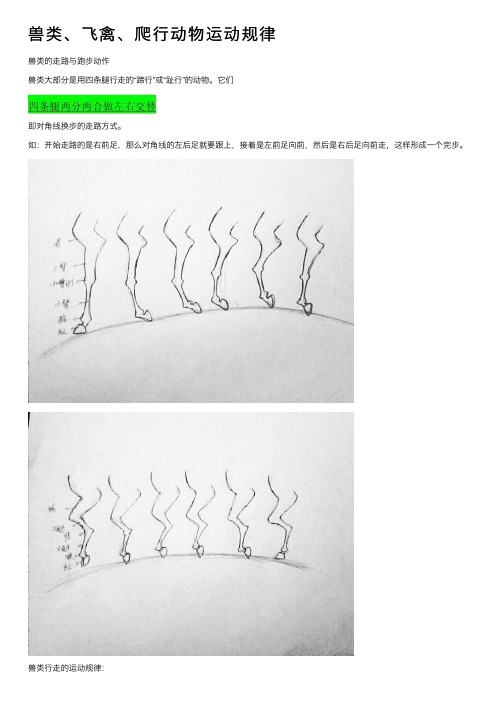
兽类、飞禽、爬⾏动物运动规律兽类的⾛路与跑步动作兽类⼤部分是⽤四条腿⾏⾛的“蹄⾏”或“趾⾏”的动物。
它们即对⾓线换步的⾛路⽅式。
如:开始⾛路的是右前⾜,那么对⾓线的左后⾜就要跟上,接着是左前⾜向前,然后是右后⾜向前⾛,这样形成⼀个完步。
兽类⾏⾛的运动规律:1、四条腿两分两合做左右交替成⼀个完步2、前腿抬起时,腕关节向后弯曲;后腿抬起时,踝关节朝前弯曲3、⾛步时由于腿关节的屈伸运动,⾝体稍有⾼低起伏4、⾛步时为了配合腿部的运动,保持⾝体重⼼平衡,头部会上下略有点动,⼀般是在跨出的前脚即将落地时,头开始朝下点动5、⽖类动物因⽪⽑松软柔和,关节运动的轮廓不⼗分明显,蹄类动物关节运动就⽐较明显6、兽类动物⾛路动作的运动过程中,应注意腿、趾落地、离地时所产⽣的⾼低弧度兽类的跑步运动规律1、动物奔跑动作基本规律与⾛步时四条腿的交替分和相似,但是跑的越快,四条腿的交替分和越不明显。
有时会变成前后各两条腿同事屈缩,四脚离地时只差⼀到两格2、奔跑的过程中,⾝体的伸展(拉长)和收缩(缩短)姿态变化明显(尤其时⽖类动物)3、在快速奔跑过程中,四条腿有时呈腾空跳跃状态,⾝体上下起伏较⼤,但在极度快速奔跑的情况下,⾝体起伏的弧度⼜会减⼩4、奔跑动作速度。
⼀般快跑中间需画11—13张动画(如拍两格张数减半)。
快速奔跑为8—11张动画拍⼀格,特别快速飞奔为5—7张动画拍⼀格兽类的跳跃运动规律1、在跃出前躯⼲先往后收缩成蹲状,准备⼒量,利⽤后退有⼒⼀蹬,把⾝躯弹出2、在运动过程中,⾝体悬空,前肢弯起伸向前⽅,准备着地3、着地时前肢先接触地⾯,承受⾝体前冲运动的惯性作⽤,⾝体会由挺直到蜷缩4、后退着地后,冲⼒减弱才回复原状禽类⼀、家禽家禽多以⾛为主,如鸡、鸭、鹅等。
它们主要靠双脚或在⽔中浮游,有时也能扑打着双翅,做短距离的飞⾏动作。
1、鸡鸡的⾛路运动规律:⑴双脚前后交替运动,⾝体左右摇摆⑵当⼀只脚抬起时,头开始向后收;超前⾄中间位置时,头伸到最前⾯;当脚向前落地时,头也随之超前伸到顶点⑶注意在运动过程中脚掌的变化2、鹅鹅的⾛路运动规律⑴鹅⾛路时屁股左右摇摆⑵头随脚的抬起前后略微点地⑶鹅在划⽔时,两脚前后交替⼆、飞禽飞禽以飞为主,⼀般是指鸟类,分为阔翼类和雀类。
小学科学13壁虎与小猫(教案
小学科学13壁虎与小猫(教案一、教学内容本节课选自小学科学教材第五册第三章《动物的运动》中的第13课《壁虎与小猫》。
详细内容包括:了解壁虎和小猫的运动特点,探究它们运动方式的异同,掌握动物运动与生活环境的适应关系。
二、教学目标1. 知识与技能:学生能够描述壁虎和小猫的运动特点,了解它们运动方式的异同,认识到动物运动与生活环境的适应关系。
2. 过程与方法:学生通过观察、比较、分析,提高观察力和逻辑思维能力。
3. 情感态度价值观:激发学生对动物运动的兴趣,培养学生的探究精神。
三、教学难点与重点教学重点:壁虎与小猫的运动特点及其异同。
教学难点:动物运动与生活环境的适应关系。
四、教具与学具准备1. 教具:壁虎和小猫的图片、视频,实验材料等。
2. 学具:观察记录表、画图工具等。
五、教学过程1. 导入新课实践情景引入:播放壁虎在墙上爬行、小猫在地面跳跃的视频,引导学生关注动物的运动特点。
提问:你们知道壁虎和小猫的运动特点吗?它们为什么会有这样的运动方式?2. 新课探究学生分组讨论:观察壁虎和小猫的图片,讨论它们的运动特点。
实践活动:学生动手实验,观察壁虎和小猫在不同环境下的运动表现,探讨动物运动与生活环境的适应关系。
3. 例题讲解出示例题:壁虎为什么能在墙上爬行?学生思考、讨论:引导学生从壁虎的足部结构、身体特点等方面进行分析。
教师解答:讲解壁虎在墙上爬行的原因。
4. 随堂练习学生画图展示:展示壁虎和小猫在不同环境下的运动方式。
5. 课堂小结六、板书设计1. 壁虎的运动特点:爬行、吸附、快速移动。
2. 小猫的运动特点:行走、奔跑、跳跃。
3. 动物运动与生活环境的适应关系。
七、作业设计1. 作业题目:观察生活中的动物,记录它们的特点和运动方式,分析其与生活环境的适应关系。
2. 答案:学生根据观察到的动物,结合本节课所学内容,进行解答。
八、课后反思及拓展延伸1. 课后反思:教师反思本节课的教学效果,了解学生对壁虎与小猫运动特点的理解程度,为下一节课做好准备。
2023年全国中学生生物竞赛各省市试题选编第十四章生物技术和能力

生物技术和能力一、单项选择题1.(陕西99)研究生物学问题的方法有:①推论②结论③问题④实验⑤观测⑥假设,其研究的环节应是A ③⑥①④⑤②B ③⑥④⑤①②C ⑤③①⑥④②D ⑤③⑥①④②2.(湖南99预赛)甲、乙、丙、丁、戊是有关显微镜的几个操作环节,右边两图是在显微镜下观测到的番茄果肉细胞,要将图1转换为图2,所列A、B、C、D4种操作顺序中,对的的应是甲.转动粗准焦螺旋乙.转动细准焦螺旋丙.调节光圈丁.转动转换器戊.移动玻片A 甲→乙→丙→丁B 丁→丙→乙C 戊→丁→丙→乙D 丁→戊→甲→丙3.(陕西98)生物学实验中常用普通光学显微镜观测细小物体,若物体被放大50倍,这里“被放大50倍”是指该细小物体的A 体积B 表面积C 像的面积D 长度或宽度4.(福建99预赛)在鉴定种子中含淀粉成分时,右图所示液体的颜色分别是(已滴完)A 白色、黑色B 乳白色、蓝色C 棕色、黑色D 棕色、蓝色5.(浙江98)在观测青蛙心脏活动的实验中,为了保证心脏能正常的代谢,要用生理溶液灌注心脏,所用生理溶液的溶质质量分数是A 0.9%B 0.7%C 0.6%D 0.5%6.(陕西98)在解剖蚯蚓时,重要目的是具体观测蚯蚓的神经系统,同时也希望能看到它的重要血管,解剖的方法最佳是A 沿着背部中线将体壁纵切B 沿着身体两侧中线将体壁纵切C 沿着腹面正中线将体壁纵切D 将蚯蚓横切,剪成3段7.(陕西98)采集飞翔的昆虫时,手执捕虫网对的的捕法是A 从背后兜捕B 迎面兜捕C 从上向下兜捕D 从下向上兜捕8.(陕西97)观测胞间连丝的抱负材料是A 厚壁细胞B 薄壁细胞C 导管D 表皮细胞9.(山东98决赛)制作草履虫装片时,吸取一滴草履虫培养液的位置是A 培养液的底层B 培养液的表层C 培养液的中层D 培养液的中下层10.(广东99预赛)做鳞翅目昆虫标本时,昆虫针要插在A 中胸中央偏有一些B 右面翅鞘的左上角C 前翅基部上方的右侧D 前胸和中胸之间11.(江苏98)浸制保存小型脊椎动物最常用的保存液是A 95%酒精B 70%酒精C 95%福尔马林D 70%福尔马林12.(陕西98;福建99预赛)在光照明亮的实验室里,用白色洋葱表皮细胞做质壁分离实验,在显微镜视野中能清楚看到细胞壁,但看不清楚细胞是否发生质壁分离,为便于判明。
壁虎飞檐走壁的原理

壁虎飞檐走壁的原理
壁虎是一种常见的爬行动物,它们有着独特的生存方式和行动方式,可以在各种环境中自如地爬行。
壁虎的飞檐走壁的能力,是由其身体结构和生理特点所决定的。
壁虎的脚掌上有着许多微小的肉质突起,这些突起被称为趾盘,可以让壁虎在垂直的表面上附着。
趾盘的表面有着许多微小的毛细管,可以形成分子间的吸附力,从而让壁虎能够在垂直的表面上行走。
此外,壁虎的趾盘还有着弹性,可以让它们在行走时更加灵活。
壁虎的身体结构也有助于它们的飞檐走壁。
壁虎的身体非常柔软,可以让它们在狭小的空间中自如地穿行。
此外,壁虎的尾巴也有着重要的作用,可以让它们在行走时保持平衡。
壁虎的尾巴还可以用来抓住物体,从而增加它们的附着力。
壁虎的生理特点也是其飞檐走壁能力的关键。
壁虎的心脏和呼吸系统非常发达,可以让它们在高处行走时保持平衡和稳定。
此外,壁虎的眼睛也非常敏锐,可以让它们在行走时更加警觉和敏捷。
壁虎的飞檐走壁能力是由其身体结构、生理特点和行动方式所决定的。
壁虎的趾盘、柔软的身体、尾巴和发达的心脏和呼吸系统,都是其能够在各种环境中自如地爬行的关键。
壁虎的飞檐走壁能力不仅是一种生存方式,也是一种独特的生物学现象,值得我们深入研究和探索。
壁虎运动反力和行为的动态同步表示方法
壁虎运动反力和行为的动态同步表示方法作者:邢强戴振东王周义来源:《现代电子技术》2010年第02期摘要:运动反力测试是认识动物运动力学规律的最直接途径,但目前测试得到的数据难以与运动行为很好关联。
为此提出一种立体直观表示运动反力的方法,并和动物的运动行为直接关联。
针对以往的人工筛选数据的方法,提出数字图像在动力学数据筛选方法研究中的应用:采用数字图像目标检测的方法进行数据的筛选,在保证筛选正确率的基础上提高筛选效率;结合高速摄像机获得的图片采用OpenGL纹理渲染的方式展现壁虎的运动状态和脚掌受力,实现用于分析壁虎运动状态和脚掌力间的协调关系,为四足机器人的步态规划提供重要参考。
关键词:数据筛选;动力学仿真;大壁虎;OpenGL中图分类号:TP391文献标识码:A文章编号:1004-373X(2010)02-147-04Dynamic Synchronous Representation between Reaction_force and Motion of GeckoXING Qiang1,2,DAI Zhendong1,WANG Zhouyi 1,2(1.Institute of Bio_Inspired Structure and Surface Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing,210016,China;2.College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing,210016,China)Abstract:Anti_force testing is the direct way to recognize the laws of animal movementanti_force.However,the data obtained from the current test associated with motor behavior is not very good.To this end,a three_dimensional visual representation of the movement anti_force method is proposed.In this paper,in ensuring the correct rate to improve screening efficiency,uses digital image target detection methods to filter experimental data,different from the previous manual ing the images obtained by the high_speed camera,it shows the kinestate of Gekko gecko and stress of Gekko gecko soles of the feet,based on the technique of OpenGL texture rendering.It makes visualization to analyse the harmonious relations between the kinestate and inter_foot force of Gekko gecko.Keywords:data screening;dynamics simulation;Gekko gecko;OpenGL0 引言基于颜色内容检索的数字图像处理技术可以缩小特征数据库的大小,实现特定颜色区域的定位、跟踪,并根据需要计算出目标在数字图像中的面积大小。
壁虎在垂直的不同材料表面的运动与附着行为研究
壁虎在垂直的不同材料表面的运动与附着行为研究吉爱红;顾伟;汪中原;倪勇;王周义;戴振东【摘要】用动物全空间运动行为-反力测试系统测试记录了大壁虎(gekko gecko)在垂直的玻璃、有机玻璃、铝和不锈钢表面的运动行为和运动反力.分析了壁虎在垂直的不同材料表面的运动附着能力与材料表面特性之间的关系.大壁虎在玻璃、有机玻璃、铝表面上采用对角步态向上爬行,运动与附着能力依次降低,在不锈钢表面不能爬行与附着.在玻璃表面的爬行速度是铝表面爬行速度的两倍.壁虎主要通过提高步频来提高速度.在运动与附着能力较弱的表面,壁虎对壁面的运动反力较小,通过降低爬行速度、提高占空比、增加腿的附着时间来保证运动的稳定与安全,并通过轴向力克服身体重力向上爬行,通过侧向力和法向力使身体稳定地附着在壁面上.壁虎在垂直表面的运动与附着能力随着接触面材料表面能的增加而提高.【期刊名称】《中国机械工程》【年(卷),期】2014(025)004【总页数】7页(P432-438)【关键词】运动;动力学;黏附机制;表面能;壁虎【作者】吉爱红;顾伟;汪中原;倪勇;王周义;戴振东【作者单位】南京航空航天大学,南京,210016;南京航空航天大学,南京,210016;南京航空航天大学,南京,210016;南京航空航天大学,南京,210016;南京航空航天大学,南京,210016;南京航空航天大学,南京,210016【正文语种】中文【中图分类】Q8110 引言在亿万年的生存与演变过程中,生物的形态结构、运动机理和行为方式逐渐与其生存环境相适应[1]。
壁虎[2-3]、昆虫[4]等能够在各种崎岖不平的表面或光滑的表面上自由爬行或附着。
动物在不同材质表面的附着机制及运动行为的研究,对研制具有全空间自由运动能力的仿生机器人有重要意义[5-6]。
壁虎脚趾上长有数以百万计的刚毛,在光滑壁面上,主要依靠脚趾刚毛与运动表面产生的黏附力附着于各种表面,其脚掌的黏附过程就是刚毛与运动表面黏附及脱附的过程。
壁虎粘附力性质

研究的法
AFM原子力显微镜
测量原理
原子力显微镜 (AFM),一种可 用来研究包括绝缘 体在内的固体材料 表面结构的分析仪 器。它通过检测待 测样品表面和一个 微型力敏感元件之 间的极微弱的原子 间相互作用力来研 究物质的表面结构 及性质。 由于针尖尖端原 子与样品表面原 子间存在极微弱 的排斥力,通过 在扫描时控制这 种力的恒定,带 有针尖的微悬臂 将对应于针尖与 样品表面原子间 作用力的等位面 而在垂直于样品 的表面方向起伏 运动。
在相对湿度变化范围为0.10〜0.95内,半径为15nm的 氮化硅球体与云母的黏附力模拟。
实验结果
• 为了确保模拟计算的可行性,在不同湿度下进行力-距离测量。
接触角 30° 30° 30° 110° N.A. 环境 Dry N2 70% RH Wet N2 70% RH Water 平均力 4.4 11.8 6.2 4.9 1.8 标准差 0.8 2.2 1.2 0.9 0.5
研究结论
结论
我们测量了单个壁虎绒毛产 生的黏附力。由于壁虎黏附 力与表面疏水性和是否存在 水有关,我们可以得出结论, 粘合力的主要组成部分是毛 细管力。这一发现是许多有 趣的自然现象之一,可提高 人类的技术知识,例如人造 壁虎仿生设备。
问题与思考
Evidence for van der waals adhesion in gecko setae. Autumn K, Metin S, Liang Y A, et al.
研究的方法
为了确定范德华力的振幅,测量要在液体或完全干燥 (高真空)环境下进行,以便于消除毛细管力的影响。
由于任何自然栖息地的相对湿度(RH)始终至少为10 %,毛细管力在壁虎的黏附中很可能起到一定的作用。
动植物的运动方式与行为特征
鱼类:通过摆动尾鳍和胸鳍来游泳
海龟:通过四肢划水来游泳
企鹅:通过双脚划水来游泳
鲸鱼:通过上下摆动尾鳍和胸鳍来游泳
水母:通过伞状体和触手来游泳
ห้องสมุดไป่ตู้
鸟类的飞行方式
鸟类的飞行方式主要有滑翔、翱翔、俯冲、上升、盘旋等。
鸟类的飞行速度因种类而异,最快的鸟类可以达到每小时300公里以上。
鸟类的飞行高度也因种类而异,有的鸟类可以在高空飞行,有的鸟类只能在低空飞行。
定义:动物为了寻找食物、繁殖或躲避恶劣环境而进行的长距离移动
迁徙类型:鸟类迁徙、鱼类迁徙、哺乳动物迁徙等
03
植物的运动方式
向光性运动
概念:植物向光源方向生长的特性
原因:植物需要阳光进行光合作用
例子:向日葵、牵牛花等
影响因素:光照强度、温度、水分等环境因素
向地性运动
向地性运动的机制:生长素、细胞分裂素、乙烯等植物激素的作用
植物和动物共同进化,形成独特的生态系统
05
动植物运动与行为特征的进化意义
适应环境的重要性
动植物通过运动与行为特征适应环境变化
运动与行为特征的进化有助于提高生存能力
适应环境的能力是动植物进化成功的关键
运动与行为特征的进化可以促进物种多样性和生态平衡
物种多样性的形成
动植物的运动与行为特征是物种多样性的重要体现
XX,a click to unlimited possibilities
动植物的运动方式与行为特征
目录
01
动物的运动方式
02
动物的行为特征
03
植物的运动方式
04
植物的行为特征
05
动植物运动与行为特征的进化意义
壁虎的动态吸附与壁虎纳米材料仿生学_杨文伍

90 ° , 分离所需要的力越来越小 。 以壁虎绒毛与基底接触点为支点 , 绒毛另一端 与基底的距离为力臂 , 吸附和脱附时拖拽力均平行 于基底 , 但方向相反 。 脱附时的力臂远远大于吸附 过程中的力臂 , 由杠杆原理知 , 壁虎仅需用很小的力 即可让绒毛与基底分离 另外一种解释
[ 23] [ 31]
[ 6] [ 6]
第 21 卷
年和 1878 年开始研究壁虎脚掌不同寻常的微结构 , 但囿于当时的科研条件 , 他们只能大致地推测壁虎 可能具有很精细的脚掌结构 。 Schmidt 在 1904 年 用光学显微镜对壁虎脚掌进行观察 , Ruibal 和 Ernst 在 1965 年利用电子显微镜对壁虎脚掌的微结构进 行观察
第 21 卷 4 期 2009 年 4 月
化 学 进 展
PROGRESS IN CHEMISTRY
Vol . 21 No . 4 Apr . , 2009
壁虎的动态吸附与壁虎纳米材料仿生学
杨文伍 何天贤 邓文礼
**
*
( 华南理工大学材料科学与工程学院 广州 510640) 摘 要 以壁虎为代表的一类脚掌具有超细绒毛结构的动物具备极强的吸附和脱附能力 。 这种独特的 能力引起科学家的极大关注并逐渐成为研究的热点 。 与一般粘附材料( 比如胶水) 产生的吸附力不同的是 , 这种吸附力可以在需要时产生或消失( 动态吸附) 。 模拟这种结构的纳米材料具有极高的实用价值 。 本文以 壁虎为例 , 从化学 、 物理学 、 生物学 、 机械工程学及材料学的角度全方位系统地介绍了壁虎动态吸附理论和基 于这种理论在仿生方面研究的最新进展 , 最后提出本领域研究工作的展望 。 关键词 纳米 壁虎 动态吸附 仿生 中图分类号 : TB383 ; Q811. 2 文献标识码 : A 文章编号 : 1005-281X( 2009) 04 -0777 -07
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的起点坐标 (左上角坐标) ,区域面积 ( ai ×bi ) , 区域中
心坐标 pi ( i = 1 ,2 , …,16) , 表中所获得的位置与理论
位置的一致性受实验平台安装精度影响 。
表 2 测力片在图像中的位置
像素
承力片编号 11 12 13 14 15 16
区域起点坐标 (375 ,262) (560 ,270) (360 ,148) (562 ,151) (354 ,34) (559 ,36)
通过图片中壁虎脚掌与承力片区域的位置关系来 判断承力片数据的有效性 ,可以采用基于颜色特征的目 标跟踪 、定位 ,以及区域面积比较的方法来实现数据的 筛选 。
图 2 阵列中传感器承力片的定位与脚掌的位置匹配
图 2 中所示的每个承力片的在图像中的区域位置
见表 2 ,表中列出了编号为 11~16 的承力片在图像中
《现代电子技术》2010 年第 2 期总第 313 期
计算机应用技术
壁虎运动反力和行为的动态同步表示方法
邢 强1 ,2 ,戴振东1 ,王周义1 ,2
(1. 南京航空航天大学 仿生结构与材料防护研究所 江苏 南京 210016 ; 2. 南京航空航天大学 机电学院 江苏 南京 210016)
ห้องสมุดไป่ตู้
2. 2 基于颜色特征区域的数据筛选方法 该方法的主要原理就是通过对系统承力片和壁虎
脚掌数字图像的定位 、区域面积的比较 ,确认两者之间 的关系 ,判断数据是否有效 。 2. 2. 1 承力片的定位
在力学测试前 ,要将高速相机放在合适的位置获得 最佳的图像 ,在一次测试实验中 ,镜头和试验平台的距离 是保持不变的 ,对于这样的每一组数据只需要对镜头进 行一次标定。图 2 中白线框区域为承力片所在区域 ,在 实物 中 横 向 距 离 为 W = 140 mm , 纵 向 距 离 为 L = 240 mm ,测力片大小为 30 mm ×30 mm 的有机玻璃片。 通过系 统 的 预 处 理 可 以 得 到 黄 色 线 框 的 起 始 坐 标 为 (354 ,34) ,即采用的坐标系和图像坐标系一致 ,左上角为 坐标原点标为 (1 ,1) ,单位为像素 ,所有的坐标取整。
2 基于颜色特征的实验数据筛选
2. 1 有效数据的筛选依据 由于壁虎运动的不可控性 ,运动中壁虎脚掌和承力
片的位置会出现以下几种情况 ,如图 1 所示 (图中线框 表示承力片在图片中的区域) :图 1 (a) 中壁虎脚掌没有 完全踩在承力片上 ,那么此时刻对应的承力片获得的数 据是无效的 ;图 1 ( b) 中壁虎脚掌完全踩在承力片上 ,对 应的 承 力 片 获 得 的 数 据 就 为 此 刻 此 脚 掌 的 受 力 ; 图 1 (c) 中壁虎脚掌完全踩在承力片区域 ,当壁虎脚趾 刚毛部分和承力片的交接面积大于壁虎脚趾刚毛面积 的 60 %时 ,那么此脚掌的受力为两承力片上力学数据 的矢量和 。
承力片和线框之间的距离相对不变 ,位置关系如 下 :在实际系统中第一个承力片的区域相对于标记点位 置 ,可以看成是由四顶点 (0 ,0) , (0. 3 ,0) , (0. 3 ,0. 125) , (0 ,0. 125) 构成的一个正方形区域 ,其余的承力片可以 通过在宽度方向上平移为 0. 4 个单位 ,在长度方向上平 移为 0. 125 个单位 。根据几何直线不变性和相似不变 性原理[13] ,可通过四个定位点的坐标获得每个承力片 在数字图像中的位置 。
在动物动力学研究中 ,为了探索生物体运动的基本 原理 ,建立仿生推进技术的理论框架 ,各国科研人员根 据动物具有的运动特性[6] 开展了大量的定性观察和实 验[7 ] ,研究如蝗虫[8 ] 、马[9 ] 、虎纹捕鸟蛛[10 ] 、大壁虎[11 ] 等 动物的运动步态或运动受力 。生物实验的特殊性 ,从统 计学上来讲 ,需要进行大量的实验获得样本数据 ;在研 究分析中 ,由于涉及的实验参数比较多 ,就需要根据不 同参数的组合筛选有效的实验数据 。与以往人工筛选
力学测试设备采用南京航空航天大学仿生结构与
147
科学计算与信息处理
邢 强等 :壁虎运动反力和行为的动态同步表示方法
材料防 护 研 究 所 自 主 研 制 的 动 物 三 维 运 动 反 力 测 试仪2 Ⅱ[12] 。高速摄像系统采用德国 Mikrot ro n 公司生 产的高速摄像系统 (Mikrot ro n MC1311) 进行实验拍摄 (选择 250 f/ s ,像素 1 024 ×1 024) ,高速摄像机记录下 壁虎在通道中运动的序列图像 。
关键词 :数据筛选 ;动力学仿真 ;大壁虎 ;Open GL 中图分类号 : TP391 文献标识码 :A 文章编号 :10042373X(2010) 022147204
Dynamic Synchronous Representation bet ween Reaction2f orce and Motion of Gecko
区域面积 ( ai ×bi) 114 ×117 115 ×111 111 ×115 112 ×111 117 ×114 115 ×111
区域中心坐标 pi (414 ,321) (618 ,326) (416 ,206) (618 ,207) (413 ,91) (617 ,92)
148
《现代电子技术》2010 年第 2 期总第 313 期
1 运动反力测试实验
动物运动反力测试系统主要由力学测试系统和高 速摄像系统两部分组成 ,可以测量壁虎在物体表面运动 时脚掌与附着面间的接触反力和记录大壁虎的运动步 态 。当大壁虎在传感器阵列上运动时 ,运动反力测试仪 的三维传感器阵列测量出每只脚掌的运动反力 ,用于揭 示大壁虎真实的运动规律和协调机制 ;高速摄像系统拍 摄 、记录壁虎运动的图像 ,用于观察分析大壁虎接触反 力测试过程中脚掌与传感器的接触情况 、运动步态 、脚 掌和接触面间的粘附和脱附过程 。
XIN G Qiang1 ,2 ,DA I Zhendo ng1 ,WAN G Zho uyi 1 ,2
(1. Institute of Bio2Inspired St ruct ure and Surface Engineering ,Nanjing University of Aeronautics and A st ronautics ,Nanjing ,210016 ,China ; 2. College of Mechanical and Elect rical Engineering ,Nanjing University of Aeronautics and A st ronautics ,Nanjing ,210016 ,China)
收稿日期 :2009209217 基金项目 :国家自然科学基金重点资助项目 (60535020) ;
国家“863”计划资助项目 (007AA04Z201)
数据和步态分析的方法相比 ,为提高实验数据的筛选效 率和实现受力状态下步态分析的可视化 :提出了采用跟 踪颜色特征区域的方法 ,通过分析壁虎运动过程中脚掌 位置和承力片位置的关系 ,在保证准确率的前提下 ,实 现对有效实验数据的快速筛选 ; 通过 Open GL 进行壁 虎运动受力的仿真 ,便于分析壁虎运动和受力的关系并 建立壁虎运动力学模型 。
摘 要 :运动反力测试是认识动物运动力学规律的最直接途径 ,但目前测试得到的数据难以与运动行为很好关联 。为 此提出一种立体直观表示运动反力的方法 ,并和动物的运动行为直接关联 。针对以往的人工筛选数据的方法 ,提出数字图 像在动力学数据筛选方法研究中的应用 :采用数字图像目标检测的方法进行数据的筛选 ,在保证筛选正确率的基础上提高 筛选效率 ;结合高速摄像机获得的图片采用 Open GL 纹理渲染的方式展现壁虎的运动状态和脚掌受力 ,实现用于分析壁虎 运动状态和脚掌力间的协调关系 ,为四足机器人的步态规划提供重要参考 。
(504 ,566) ,区域的长宽 ( a ×b) 为 115 ×142 ,中心坐标
为 P(562 ,637) ,单位为像素 。
计算机应用技术
2. 2. 2 运动目标区域的定位
首先在力学实验前对壁虎的脚掌进行标记处理 ,采
用明显区别于实验平台背景的颜色给壁虎的脚掌着色 ,
便于处理中对颜色特征区域的提取分割 。通过图像处
理方法确定这些区域中心在数字图像中的位置 。如
图 2中方框内区域所示 ,通过数字图像的处理可以判断
出脚掌踩在数字图像中的区域 ,图中所示的区域起点为
Keywords :data screening ;dynamics simulatio n ; Gekko gecko ;Open GL
0 引 言
基于颜色内容检索的数字图像处理技术可以缩小 特征数据库的大小 ,实现特定颜色区域的定位 、跟踪 ,并 根据需要计算出目标在数字图像中的面积大小 。基于 颜色 特 征 识 别 的 技 术 , 在 车 牌 快 速 定 位[1] 、农 业 工 程[224 ] 、植物学[5 ] 等方面有着广泛的应用 。
通过运动反力测试实验可以获得的壁虎运动的力 学实验数据和对应的运动图像 ,但这些都要进过筛选才 能用于分析研究 。在以往的数据筛选中 ,首先查看图像 序列 ,通过判断在某一时刻图片中壁虎脚掌完全踩在承 力片区域 ,根据区域所对应的承力片编号 ,查找对应承 力片的力学数据 ,进行分析 ;这样的数据筛选方法需要 大量的时间和人力 ,为了提高筛选的效率本文提出了基 于颜色特征的实验数据筛选方法 。
Abstract :Anti2fo rce testing is t he direct way to recognize t he laws of animal movement anti2force. However ,t he data o b2 tained f rom t he current test associated wit h motor behavio r is not very good. To t his end ,a t hree2dimensio nal visual rep resenta2 tion of t he movement anti2force met hod is p ropo sed. In t his paper ,in ensuring t he co rrect rate to imp rove screening efficiency , uses digital image target detection met hods to filter experimental data ,different f rom t he p revio us manual met hod. U sing t he images obtained by t he high2speed camera ,it shows t he kinestate of Gekko gecko and st ress of Gekko gecko soles of t he feet , based o n t he technique of Open GL text ure rendering. It makes visualization to analyse t he harmonious relations between t he kinestate and inter2foot force of Gekko gecko .