一种新型模块化钻机搬家车的研制
阿特拉斯.科普柯钻机选购指南

阿特拉斯·科普柯建筑与矿山技术部设备选购指南阿特拉斯·科普柯集团是一家全球领先的工业生产解决方案供应商。
其提供的产品和服务从压缩空气及气体设备、发电机、建筑及采矿设备、工业工具和装配系统到相关售后服务及专业租赁,一应俱全。
通过与客户及商业伙伴的紧密合作,在135年生产经验的基础上,阿特拉斯·科普柯为实现卓越生产力而不断创新。
集团总部位于瑞典斯德哥尔摩,业务遍及170多个国家和地区。
阿特拉斯·科普柯凭借百余年积累的技术优势,为中国的各类矿山和主要的基础设施建设提供先进的生产力和服务。
从最大的露天煤矿——准格尔煤矿,到最大的地下铁矿——梅山铁矿、最大的镍矿——金川镍矿,以及中国最大的水泥公司——安徽海螺;从规模居世界第一的三峡工程,到中国最长的铁路隧道——长达18公里的秦岭铁路隧道。
在这些威名显赫的矿山和举世瞩目的伟大工程中,阿特拉斯·科普柯产品为露天钻孔、地下凿岩、岩石加固、基础工程、挖掘水井、石油和天然气开采等提供先进的生产力,并能有效的降低运行成本。
早在20世纪20年代,阿特拉斯·科普柯的产品就已经进入中国。
80年代初,阿特拉斯·科普柯在香港成立公司,并同时在北京、上海和广州建立代表处。
阿特拉斯·科普柯(中国)投资有限公司是集团公司设在中国上海的地区性总部,负责所有下属机构,涉及所有权、法律、税务和机构事宜,提供财务、信息系统经营服务和人力资源支持及培训,并通过浦东客户服务中心向所有属下机构提供物流支持。
阿特拉斯·科普柯(上海)贸易有限公司设立在上海浦东外高桥,负责进口产品和本地制造产品的销售和服务。
阿特拉斯·科普柯(南京)建筑矿山设备有限公司始建于1993年,位于南京国家级经济技术开发区,主要负责生产、销售和服务全系列液压、气动露天钻机、地下钻机和铲运机等。
公司于2000年通过ISO 14001和ISO 9001认证。
PEMEX可搬迁式小模块化钻机技术方案实施

PEMEX可搬迁式小模块化钻机技术方案实施作者:张绍营金志全李杰来源:《中国石油和化工标准与质量》2013年第11期【摘要】可搬迁式小模块钻机形式具有安装、拆卸灵活,搬迁方便,海上安装运输不依赖大型驳船、浮吊设备的特点,将是模块钻机未来的主要发展趋势。
墨西哥石油国家公司(PEMEX)可搬迁式小模块化钻机的建造,是我国利用国内的先进技术,进一步开拓海外模块钻机市场的机会。
本文介绍了PEMEX可搬迁式小模块化钻机的技术要求,总体布置方案及钻机的主要技术参数。
【关键词】模块钻机可搬迁小模块化总体布置技术参数自2006年中海油服成功完成墨西哥石油国家公司(PEMEX)四套模块钻机的建造后,中海油服在海洋钻机领域,凭借其技术和价格优势成功的打入了国际市场。
2012年,中海油服再次取得墨西哥石油国家公司(PEMEX)公开招标的一套可搬迁式小模块化钻机建造项目的合同。
此套模块钻机包含一个100人的生活楼及钻井深度可达9000米的可搬迁式模块钻机装置。
目前世界上在用的可搬迁式模块钻机绝大部分的钻进能力均为7000米以下。
此套钻机是我国第一套自由研发的钻进能力达9000米的可搬迁的小模块化钻机。
1 概述此套可搬迁式小模块钻机将应用于墨西哥石油国家公司(PEMEX)位于墨西哥湾墨西哥水域的“Tsimin-C”八腿固定平台。
将用于钻井、完井、修井以及其他有关工作。
该钻机必须满足墨西哥湾天气条件,按照最新MODU、IMO、API以及其他墨西哥政府执行的环保和安全规范设计。
2 技术要点本钻机具有以下技术要点:(1)小模块设计,钻机安装和拆除依靠自身资源完成,不需要动用浮吊;(2)750ST钻机提升能力和旋转系统、7500psi高压泥浆系统;(3)100人生活楼(医生除外)和相应的生活和救生设施;(4)钻机自带排放和污水处理系统,负责收集钻机的含油污水、黑水和灰水,经过相应的分离和处理达标后排海或外运;5.钻机自带海水和消防水系统,作为钻机公用和消防用。
ZJ90DB使用说明书
ZJ90DB 钻机使用说明书及维护手册
断电。作业期间,应有专人看管电气开关(电闸),使其始终处于断开状 态。电控系统、电路的维护和检修作业必须两人以上。
9. 提升 提升和移动物体时,应充分考虑提升设备能力和被移动物体重量的比率。人 员应当远离被提升和移动的物体,任何情况下人员都不允许位于被提升的物体下 方。 9. 溶剂或染料的使用 在特定的安全的储存器中储存少量的干净的溶剂或染料。一些溶剂或染料可 能对皮肤、眼睛、呼吸系统有害。使用时必须遵守制造厂家的警告和安全指示。 并且只允许在通风和被允许的区域内使用。废弃的被溶剂或染料污染的抹布必须 放入特定的处理器中。 11. 压缩空气的使用 使用压缩空气的设备即使当压缩空气压力已降低到小于 30psi 时,也有可能 产生一个掺杂微粒的环境。因此使用压缩空气时必须带上有效的切屑防护器和个 人防护设备。而且决不允许压缩空气口对着自己和别人。 12. 移动件
当操作移动件时手、头发、衣服、首饰、抹布和工具应当远离之。 13. 可见度 当可见度不高时,不允许操作该设备。包括日出以前或日落之后都不允许操 作,除非有合适有效的光源。 14. 起动前 在起动该设备之前要确保所有控制元件都在合适的位置(开、关、中等)。 在起放该设备井架时风速要求≤8.3m/s(16knots)。 15. 工作区域 在操作该设备时要保持工作区域干净,不得有障碍物、手动工具和其它物体。 16. 动火要求 在该设备安装和拆卸的过程中,允许动火(电焊、气焊等)。但是在操作过程 中动火要远离危险区域,并且要征得有关人员的同意。
本使用维护手册对产品的安装、使用、维护与保养给出了相应指南。 本使用维护手册的使用对象是对钻井设备(或其他设备)具有一定知识、熟 悉的操作人员和技工,因此本使用维护手册并非预期涵盖了可能遇到的每一种情 况。 部分设备操作和维护资料取自各制造厂商的手册。如果该制造商颁布了新的 使用维护手册,或者有矛盾,除非另有规定,该制造厂商的资料优先于本手册给 出的资料。 本公司保留在任何时候废止(或更改)产品型号、而无须通知,也不负任何 责任和义务。 本使用维护手册未经本公司同意,不得提供给第三方,否则对所产生的后果 要负法律责任。 本使用维护手册虽经详细的审校,但仍可能有不妥之处,敬请指正。 安装、使用产品前,请仔细阅读本使用维护手册!
ZDY6000LD钻机
煤矿安全高效的生产要求,使煤炭采掘与 瓦斯钻孔施工速度的矛盾日益突出,对成 孔速度提出了更高要求
目前制约成孔速度主要有两大因素
1.钻机搬迁拆装等辅助时间长(MK-7型钻机使用统计)
搬迁拆装 2.分体式钻机经常拆装, 液压系统易污染,故障率提 高,油液损失严重
b.卸扣联动:反转时,部分高压油进入夹持器的 副油缸,以增加夹持器的夹紧能力,防止打滑
c.夹转联动:可实现正转时卡盘卡紧、夹持器自动 松开,停止回转后,夹持器自动卡紧,防止因误 操作引起滑杆事故
d.起下钻联动:在起钻或下钻工况下实现给进油缸与卡 盘、夹持器之间的联动。由于卡盘、夹持器自身工作原 理不同,可保证实现“先卡紧,后松开”的特殊要求。 当该阀处于中位时取消联动,可单独使给进油缸运动, 增加其机动性
位置、数量:在车体四角位置,设有四对 特点:缸尾两两对接,动作可单独控制 具备液压锁紧,可有效保压 应用:车体稳固、机身调角方便可靠,适 应性强
2.主机
回转 器 夹持 器 给进装 置
给进装置为两根双杆双作用缸直接驱动,带动拖板 和回转器沿机身导轨移动,整体钢性好,可靠性高
回转器
设计有主轴制动功 能的液控抱紧装置
• 初次运转前要从Ⅰ泵泄油口或高压出口加液 压油,边加油边拨转联轴器 • 初始压力调至(1.5~2) MPa;泵压调至26 MPa
Ⅱ泵循环原理图
Ⅱ泵调试
• 初次运转前要从 Ⅱ泵泄油口或高 压出口加液压油, 边加油边拨转联 轴器 • 泵压调至21 MPa
1.液压联动回路
a.卡转联动:回转器正、反转时,回转油路中的部分 高压油通过单向阀进入液压卡盘,使卡盘自动卡紧 钻杆
搬运机器人设计论文
按驱动方式可分为:(a)气压驱动;(b)液压驱动;(c)电气驱动。电气驱动是20世纪90年代后机器人系统应用最多的驱动方式。它有结构简单、易于控制、使用方便、运动精度高、驱动效率高、不污染环境等优点。
(4)按用途分类:
可分为搬运机器人、喷涂机器人、焊接机器人、装配机器人、切削加工机器人和特种用途机器人等。
应用搬运机器人进行工作,这是直接减少人力的一个侧面,同时由于应用搬运机械人可以连续的工作,这是减少人力的另一个侧面。因此,在自动化机床的综合加工自动线上,目前几乎都有搬运机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
可见,有效的应用搬运机械手,是发展机械工业的必然趋势机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段,国内外都很重视它的应用和发展。搬运机器人是典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起越来越重要的作用。
1.2机器人的产生与发展史
“机器人”是存在于多种语言和文字的新造词,它体现了人类长期以来的一种愿望,即创造出一种像人一样的机器或人造人,以便能够取代人去进行各种工作。
1920年,捷克剧作家卡雷尔·凯培克(KarelCapek)在他的幻想情节剧《罗萨姆的万能机器人》中,第一次提出来“机器人”这个名词。各国对机器人的译法,几乎都从斯洛伐克语“robota”音译为“罗伯特”,只有中国译为“机器人”。
③搬运机械手的控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
④搬运机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,搬运机械手还应用了视觉、力觉等传感器,
SDC-2500型全液压车载钻机的研制与应用

第43卷第6期2016年6月探矿工程(岩土钻掘工程)ExplorationEngineering(Rock&SoilDrillingandTunneling)Vol.43No.6Jun.2016:44-48 收稿日期:2016-01-19;修回日期:2016-04-22 基金项目:中国地质调查局地质调查项目“地质勘探深井车载钻机完善与应用”(编号:12120113017000) 作者简介:和国磊,男,汉族,1984年生,机械设计及其自动化专业,从事钻探设备的研发工作,河北省廊坊市金光道77号,hgliet@sina.com。
SDC-2500型全液压车载钻机的研制与应用和国磊,冯起赠,许本冲,刘晓林,秦如雷,刘家誉(中国地质科学院勘探技术研究所,河北廊坊065000)摘要:随着我国对资源勘探开发投入不断加大,全液压车载钻机已大量投入到钻探生产中。
SDC-2500型全液压车载钻机将负载敏感液压系统、PLC电控系统应用于钻机的控制执行系统,具有集成度高、机动性强、全液压顶驱、远程电控、多工艺适应性等特点。
通过野外生产试验,验证了钻机的性能,展现出较高的机械化程度和可靠性。
关键词:全液压车载钻机;全液压顶驱;负荷敏感系统;PLC控制中图分类号:P634.3+1文献标识码:A文章编号:1672-7428(2016)06-0044-05DesignandApplicationofSDC-2500FullHydraulicTruckMountedRig/HEGuo-lei,FENGQi-zeng,XUBen-chong,LIUXiao-lin,QINRu-lei,LIUJia-yu(TheInstituteofExplorationTechniques,CAGS,LangfangHebei065000,China)Abstract:WiththeincreasinginvestmentofresourcesexplorationanddevelopmentinChina,alargeamountoffullhydrau-lictruckmountedrigsareputintothedrillingproduction.SDC-2500fullhydraulictruckmountedrighasbeendevelopedbyCNIET,onwhichtheload-sensinghydraulicsystemandPLCelectroniccontrolsystemareappliedinthecontrolandex-ecutionsystemwiththecharacteristicsofhighintegration,strongmobility,fullhydraulictopdriving,remotecontrolandal-ternative-processadaptability.Inthefieldproductiontest,therigshowsitshighmechanizationandreliability.Keywords:fullhydraulictruckmountedrig;fullhydraulictopdriving;load-sensingsystem,PLCcontrol0 引言国外早在20世纪30年代就开始了车载钻机的开发研制,经过几十年的不断发展,到目前技术水平已经十分完善。
钻机电控系统再制造升级标准研制与应用
钻机电控系统再制造升级标准研制与应用董兴华1,2 孙 娟1,2 孟庆滨3 罗 震1,2 李洪波1,2 寻 明1,2 刘晶晶1(1.宝鸡石油机械有限责任公司;2.中油国家油气钻井装备工程技术研究中心有限公司;3.山东祺龙海洋石油钢管股份有限公司)摘 要:为了规范再制造市场,提高再制造产品质量,引领新技术在再制造领域的发展和应用。
因此有必要针对电控系统再制造的特殊性,对其再制造升级各个环节进行细化,对标准构建的基准、结构框架、再制造升级与传统维修的区别等领域开展研究,并在国外某项目上实践,应用效果获得用户认可和国际报刊报道。
该标准的实施为助推制造业绿色发展给出新的思路。
关键词:电控系统,标准,再制造升级,油气勘探Development and Application of the Standard on RemanufacturingUpgrade of Drill Rig Electronic Control SystemDONG Xing-hua 1, 2 SUN Juan 1, 2 MENG Qing-bin 3 LUO Zhen 1, 2 LI Hong-bo 1, 2XUN Ming 1, 2 LIU Jing-jing 1(1.Baoji Oilfield Machinery Co., Ltd.; 2. National Oil & Gas Drill Equipment Engineering Technical Research Center Co.,Ltd.; 3. Shandong Qilong Offshore Petroleum Steel Pipe Co., Ltd.)Abstract: In order to standardize the remanufacturing market, improve the quality of remanufacturing products, and lead the development and application of new technologies in the field of remanufacturing. Therefore, it is necessary to refine each link of remanufacturing upgrade of electronic control system according to its particularity, and carry out research on the basis of standard construction, structural framework, and the difference between remanufacturing upgrade and traditional maintenance, etc., and practice in a project abroad. The application effect has been recognized by users and reported by international newspapers and periodicals. The implementation of this standard gives a new idea to promote the green development of manufacturing industry.Keywords: electronic control system, standard, remanufacturing upgrade, oil and gas exploration作者简介:董兴华,高级工程师,博士研究生,主要研究方向为再制造、AI视觉识别和海洋钻井平台自动化控制技术。
钻机性能ZJ40D

ZJ40D电动钻机介绍ZJ40D 电动钻机介绍ZJ40/2250DZ钻机是为满足油田勘探开发和出国承包钻井的要求,由中油特车有限公司设计并开发生产的直流电传动钻机。
钻机基本参数SY/T5609标准,主要配套部件API规范,满足钻井新工艺的要求,技术性能和可靠性达到国际九十年代的先进水平,该钻机还可配相适应的顶部驱动钻井装置。
本钻机有下列特点:1.采用当今世界先进AC-SCR-IGBT-DC电传动系统,绞车、转盘和泥浆泵均可实现无级调速,获得良好的钻井特性。
启动平稳、传动效率高、负荷自动均衡分配。
2.绞车采用低位安装,解决了钻机绞车上高台困难和不安全的问题,同时也增大了钻台的有效面积。
3.绞车采用开槽滚筒,配置了液压盘式主刹车、电磁涡流辅助刹车、自动送钻装置,钻井安全、省力、准确。
4.对井架、底座等部件进行了优化设计,重量减轻,承载能力强,井架满足安装顶驱的要求,底座可以实现模块化组装。
5.电控操作台、参数仪表、盘刹操作、液气路控制、监视仪等均进入司钻控制房,便于自动化操作,改善了操作人员的工作环境。
6.对于发电机机组、变频控制柜等关键部件采用进口件,保证了钻机运行可靠、平稳,减少了故障停机时间。
7.钻机底座、井架部分满足整体运输条件,搬迁安装方便、快捷、省时、省力,搬家车次少。
8.主要部件如天车、游车、大钩、水龙头、转盘、钻井泵、井架、底座等制造和选用通过API认证的、质量可靠的成熟产品。
9.配备钢丝绳倒绳机、液压旋转猫头、液压大钳、液压升降机等辅助设备,减轻工人的操作劳动强度。
10.本钻机高配置、高性能、效率能够满足国内外油田钻井工艺要求,适应潮湿、高温的环境条件。
各系统简要说明钻台区该系统包括天车、井架、底座、游车、大钩、水龙头、转盘驱动装置、绞车、台面辅助设备、钢丝绳倒绳机和钻杆架等。
⒈旋吊系统天车是安装在井架顶部的定滑轮组,采用整体焊接结构,上部用螺栓分别与主滑轮轴座、导向滑轮轴座和滑轮轴座连接,下部用螺栓与井架连接。
HJ-120D多功能取样钻机的研制

H J -120D 多功能取样钻机的研制王士昭1,2,孔令沪1,2,张益男1,2,崔杰1,3(1.河北省地矿局国土资源勘查中心,石家庄 050081;2.河北石探机械制造有限责任公司,石家庄 050081;3.河北地矿集团有限公司,石家庄 050081)摘 要:针对环境监测施工的要求,我单位自主研发了H J -120D 多功能取样钻机㊂该钻机可实现直推给进取样及高频冲击给进取样,可以满足0~100m 深度的无扰动土壤取样,还可实现回转建井,为取水样及药剂注入提供支持㊂钻机履带行走通过性强,能应用于各种复杂地形,托架微调结构使钻机更易对正孔位,桅杆四向可调能实现多角度倾斜作业㊂钻机液压系统采用负载敏感控制系统,实现了各动作的无级调速,流量压力按需输出,节能减排㊂电气控制系统采用了C A N 总线图形显示控制器,具有数据采集㊁可编程控制㊁虚拟仪表显示㊁总线传输及故障诊断等功能㊂通过现场试验,证明该钻机适用于多种工况条件的环境取样施工㊂关键词:取样钻机;直推给进;负载敏感;C A N 总线中图分类号:P 634.3 文献标识码:A 文章编号:1009282X (2022)04000805R e s e a r c h a n d D e v e l o p m e n t o f H J -120D M u l t i -F u n c t i o n a l S a m p l i n g Dr i l l W A N G S h i z h a o 1,2,K O N G L i n gh u 1,2,Z H A N G Y i 'n a n 1,2,C U I J i e 1,31.L a n d a n d R e s o u r c e s E x p l o r a t i o n C e n t e r o f H e b e i B u r e a u o f G e o l o g y a n d M i n e r a l R e s o u r c e s B r e a u ,S h i j i a z h u a n g 050081,C h i n a ;2.H e b e i S h i t a n M a c h i n e r y M a n u f a c t u r i n g C o .,L t d ,S h i j i a z h u a n g 050081,C h i n a ;3.H e b e i G e o l o g i c a l a n d M i n e r a l G r o u p C o .,L t d .,S h i j i a z h u a n g 050081,C h i n a A b s t r a c t :A c c o r d i n g t o t h e r e q u i r e m e n t s o f e n v i r o n m e n t a l m o n i t o r i n g c o n s t r u c t i o n ,o u r c o m p a n y h a s i n d e p e n d e n t l y d e v e l o pe d H J -120D m u l t i -f u n c t i o n a l s a m p l i ng d r i l l .Thi s d r i l l c a n r e a l i z e d i r e c t p u s h a n d f e e d s a m p l i n g a n d h i g h -f r e q u e n c y i m pa c t f e e d s a m p l i n g ,a n d c a n m e e t t h e u n d i s t u rb e d s o i l s a m p l i n g a t t h e d e p t h o f 0~100m.I tc a n a l s o r e a l i z e r o t a r y we l l c o n s t r u c t i o n t o p r o v i d e s u p p o r tf o r w a t e r s a m p l i ng a n d r e a g e n t i n j e c t i o n .Th e d ri l l c r a w l e r h a s s t r o n g t r a f f i c a b i l i t y a n d c a n c o pe w i t h v a r i o u s c o m p l e x t e r r a i n .T h ef i n e -t u n i ng s t r u c t u r e o f th e b r a c k e t m a k e si t e a s i e r f o r t h e d r i l l t o a l i gn t h e h o l e p o s i t i o n .T h e m a s t c a n b e a d j u s t e d i n f o u r d i r e c t i o n s t o r e a l i z e m u l t i a n g l e i n c l i n e d o p e r a t i o n .T h e h y d r a u l i c s y s t e m o f d r i l l a d o pt s t h e l o a d s e n s i t i v e c o n t r o l s y s t e m ,w h i c h r e a l i z e s t h e s t e p l e s s s p e e d r e g u l a t i o n f o r e a c h a c t i o n ,t h e o u t p u t o f f l o w a n d p r e s s u r e o n d e m a n d ,e n e r g y c o n s e r v a t i o n a n d e m i s s i o n r e d u c t i o n .T h e e l e c t r i c a l c o n t r o l s y s t e m a d o p t s a d v a n c e d C A N -b u s g r a p h i c d i s p l a y co n t r o l l e r w i t h d a t a a c q u i s i t i o n ,p r o g r a m m a b l e c o n t r o l ,v i r t u a l i n s t r u m e n t d i s p l a y ,b u s t r a n s m i s s i o n ,f a u l t d i a gn o s i s a n d o t h e r f u n c t i o n s .K e yw o r d s :s a m p l i n g d r i l l ;d i r e c t p u s h f e e d i n g ;l o a d s e n s i t i v e ;C A N -b u s 收稿日期:20220106作者简介:王士昭(1984-),男,河北石家庄人,流体传动及控制专业,研究生,工程师,从事地质机械开发工作,E -m a i l:1927950857@q q.c o m ㊂0 引言随着经济社会的发展,环境保护及治理工作形势严峻,对土壤污染的监测和治理工作也愈发重要㊂依据‘关于保障工业企业场地再开发利用环境安全的通知“和‘土壤污染防治行动计划“等文件的要求,关停并转㊁破产或搬迁工业企业原场地采取出让方式重新供地的,应当在土地出让前完成场地环境调查和风险评估工作[1]㊂我公司为满足环境监测施工需求,自主研发了紧凑型履带式H J -120D 多功能取样钻机(见图1)㊂该钻机配套双管取样钻具及取土管,采用液压直推或高频冲击器进行冲击取样,可实现30m 内的土壤无扰动取样㊂配套螺旋钻具可以实现螺旋建井,为取水样及原位修复提供支持㊂图1 H J -120D 多功能取样钻机F i g .1 H J -120D m u l t i f u n c t i o n a l s a m p l i n g dr i l l 1 钻机的结构特点H J -120D 多功能取样钻机的主要参数见表1㊂钻机由履带底盘㊁后托架㊁平移托架㊁动力单元㊁桅杆㊁双作用动力头㊁卷扬㊁人机操作台和遥控器等部分组成,结构紧凑,可靠性强㊂履带行走通过性强,能适应各种复杂地形;平移托架实现横纵双向的微调,确保顺利对正孔位㊂增加液压后推铲托架,可以表1 H J -120D 多功能取样钻机主要参数T a b l e 1 M a i n p a r a m e t e r s o f H J -120D m u l t i f u n c t i o n a l s a m -p l i n g dr i l l 取样深度/m0~100最大取样直径/m m 124取样管长度/m m 1550螺旋建井直径/m m 194螺旋建井深度/m 0~30螺旋钻杆长度/m m1655动力头转速/(r ㊃m i n-1)32,63动力头扭矩/(N ㊃m )5660,2830冲击频率/m i n-12300~3200冲击功率/k W16~21动力头行程/m m1800动力头推进力/k N 168动力头提升力/k N 245动力系统功率/k W74整体定位支撑,还可用于悬挂钻杆框㊁清除场地杂物及平整场地,设计简化,节省成本,此设计满足了市场对取样钻机灵活性和功能性的需求[2]㊂卷扬和桅杆具有伸缩功能,当卷扬和桅杆收回后,塔头自动向滑道侧旋转45ʎ,可以缩小钻机尺寸,节省运输空间㊂冲击动力头托架可以侧移,方便提钻取样[3]㊂1.1 双作用动力头钻机采用单动力头双工艺(冲击+回转)设计,既可满足脉冲振动破除水泥地面,直推㊁脉冲钻进取样的要求,又可进行回转钻进建井㊂在旋转推进钻孔方式上增加了液压后顶锤式冲击功能,实现了冲击和旋转机构的一体化,大幅度减少配件数量,且易于保养㊂冲击活塞采用进口原材料,经特殊热处理加工,具有更高的强度㊂通过多组蓄能器蓄存液压能量和吸收液压脉冲,使冲击锤获得更高的冲击力和冲击频率㊂采用进口液压马达,结合串并联切换阀,可实现低速大扭矩和高速低扭矩之间的转换㊂1.2 可调向桅杆钻机桅杆具备四向调节的功能,桅杆起落液压缸可调节桅杆的前后角度,桅杆摆动液压缸可调节桅杆左右角度,通过桅杆旋转机构和桅杆升降机构联动调节满足多角度钻孔需要,见图2㊂图2 可调向桅杆示意图F i g .2 S c h e m a t i c d i a g r a m o f a d ju s t a b l e m a s t 2 液压系统钻机采用专为开式液压回路静压传动设计的进口负载敏感液压变量泵,噪声小,具有理想的功质比及较长的使用寿命㊂该泵为轴向柱塞斜盘结构,通过调节斜盘角度,可实现流量的无级调节,配备有2个壳体回油口,具有出色的吸油特性㊂方向控制阀采用进口负载敏感比例多路阀,可实现钻机液压缸和液压马达运动速度无级调节,且该运动速度独立于负载,不因负载的改变而变化,可使多个执行元件同时并相互独立地在不同速度和压力下工作,直到通过所有执行机构流量的总和达到泵输出的最大排量㊂康明斯发动机经法兰联轴器与负载敏感泵相连,将转速与扭矩传输至液压泵,为液压系统提供压力油,驱动各执行元件的完成设定动作,液压原理图如图3所示㊂液压系统所需功率既可由发动机低速高扭状态提供,亦可由发动机高速低扭状态提供㊂根据使用中钻机各动作工作时长及液压系统功率需求,结合发动机特性曲线及比油耗曲线,为发动机设定了合理的工作转速及负荷率,在能够充分发挥发动机输出性能的同时,还可以有效降低燃油消耗,实现节能减排[4]㊂图3 钻机液压系统F i g .3 D r i l l h y d r a u l i c s ys t e m 2.1 负载敏感系统与普通液压系统相比,负载敏感液压系统在方向控制阀和液压泵之间多了一根L S (l o a d s e n s i n g)接线油管,通过该管线能够将的实际工况的压力变化信号经多路阀传导至负载敏感液压泵,并根据多路阀操作手柄变化情况,将操作者的意图传递至负载敏感液压泵㊂负载敏感液压泵根据L S 管线的压力反馈信号,改变自身斜盘摆角来为液压系统提供合适的流量及压力,满足实际工作需求[5]㊂负载敏感变量液压泵和负载敏感多路阀的组合实现了钻机液压系统功率的按需输出,对于提高燃油经济性和节能减排意义重大㊂通过该系统可以实现钻机动力头冲击的同时,升降液压缸自由伸缩,即两液压回路压力㊁流量互不干扰,可实现独立平稳运行㊂2.2 平衡阀工作过程中要求动力头升降平稳㊁顺畅㊁可靠,能够在桅杆轨道的行程内任意位置停留,无下坠现象;在钻机起塔过程中钻塔应可以在任意角度静止,无溜滑现象;液压卷扬在提升钻杆过程中,钻杆可以在行程内任意位置静止㊂根据以上要求,液压系统在动力头升降液压缸㊁起塔液压缸和液压卷扬马达处分别加装平衡阀,用于平衡负载重力对钻机动作的影响,液压原理如图4所示㊂图4 平衡回路原理图F i g .4 S c h e m a t i c d i a gr a m o f b a l a n c e c i r c u i t此外,平衡阀与执行元件间采用钢管焊接,实现刚性连接,即使在钻机作业过程中液压胶管由于老化磨损发生破坏,也可以通过平衡阀保证执行元件及负载不会失控下降,避免对设备和人员造成伤害,增加了设备的安全性㊂3 电气控制系统钻机电气控制系统采用了先进的具备C A N 总线通讯功能的智能I O 模块及图形显示控制器等,是一个集数据采集㊁可编程控制㊁虚拟仪表㊁总线传输,故障诊断于一体的智能控制系统[6],图5为电气原理图㊂图5 电气原理图F i g .5 E l e c t r i c a l s c h e m a t i c d i a gr a m 3.1 过滤器故障报警控制过滤器用于滤除液压系统中元件磨损产生的金属颗粒㊁密封件的橡胶杂质以及液压油本身化学变化所产生的胶质㊁沥青质㊁碳渣质等污染物,使液压系统保持清洁,从而达到防止阀芯卡死,节流小孔缝隙和阻尼孔的堵塞以及液压元件过快磨损等故障的产生㊂钻机液压系统配备了吸油㊁高压及回油过滤器,三种过滤器均设置了滤芯污染发讯器和油路旁通阀㊂当滤芯被污染物堵塞或因系统温度过低及流量脉动等因素造成滤芯进出口压差达到设定压力时,发讯装置发出讯号指示,警示灯闪烁发出蜂鸣声,液晶屏幕显示具体故障位置,发讯器原理如图6所示㊂若此时不能马上停机处理这些故障,设在滤芯下部的旁通阀自动开启工作,以保护过滤器及液压系统正常工作㊂过滤器的发讯压力和旁通阀开启压力值见表2㊂图6 过滤器发讯器原理F i g .6 P r i n c i pl e o f f i l t e r t r a n s m i t t e r 表2 过滤器参数T a b l e 2 F i l t e r p a r a m e t e r s过滤器发讯压力/M P a旁通阀开启压力/M P a吸油过滤器0.0180.020高压过滤器0.5000.550回油过滤器0.3500.4003.2 液压自动冷却系统控制液压油的最佳工作温度范围在30~50ħ,此时油液的黏度㊁润滑性和耐磨性均处于最佳状态,系统传递效率最高㊂油温最高不应超过65ħ,液压油温度过高会导致油液的黏度下降,泄漏增加,各滑动部位油膜被破坏,液压元件磨损加剧,设备动作变慢无力,降低工作效率,加大发动机油耗㊂一旦液压油工作温度升高到85ħ以上,液压油的寿命就会因为氧化过程的加速而缩短㊂当液压油温度高于50ħ时,钻机控制器根据风冷却器内置温度传感器的反馈信号,使该回路多路阀电磁铁得电,风冷却器液压马达回路连通,风冷风扇开始转动,冷却系统开始工作㊂当温度低于30ħ时,电磁线圈缓慢失电,风冷却器液压马达流量缓慢下降,直至液压风冷风扇停止转动,冷却系统停止工作㊂通过对电磁铁电流实施斜坡控制,可以使冷却马达缓慢停转,规避了因液压冲击及液压管路振荡对液压系统造成的不良影响,电气原理如图7所示㊂4 试验图8为H J -120D 多功能取样钻机进行现场取样图7 风冷温控原理F i g .7 A i r c o o l i n g t e m p e r a t u r e c o n t r o l p r i n c i pl e 试验㊂取样深度30m ,取样直径34.7m m ,取土管外径38.0m m ,壁厚1.65m m ,长度1525m m ,钻具外径60.0m m ,有效长度1550m m ,平均一根下钻时间2~3m i n ㊂螺旋建井施工情况如图9,井深20m ,井口直径194.0m m ,螺旋钻杆长度1655m m ,平均一根下钻时间3~4m i n㊂图8 直推取样试验F i g .8 D i r e c t p u s h s a m p l i n gt e s t 经试验验证,钻机操作简便㊁机身稳定㊁运行平稳㊁下钻顺利,其中直推式取样,样品完整取样率高达89%㊂螺旋建井高效便捷,为地下水取样及原位修复提供了支持㊂图9 螺旋建井试验F i g .9 W e l l c o n s t r u c t i o n t e s t b y a u g e r b o r i n g5 结语通过对环境政策的了解和学习,根据取样工艺及客户的需求研制了H J -120D 型环保取样钻机,该钻机具有操作简单㊁可控性强㊁可靠性高㊁取样高效快捷㊁取样率高㊁施工效率高㊁维护方便㊁履带行走平稳㊁便于移动的优点,适用于多种施工环境和工况㊂参考文献:[1] 熊甘霖,朱新伟,李小聪,等.新型直推式取样钻机与传统回转钻机的试验对比研究[J ].中国金属通报,2020(13):218219.[2] 程林.1000型全液压动力头式车载钻机的技术研究[J ].地质装备,2010,11(6):1920,18.[3] 盛海星,高成,吕佩东,等.E S D 70型环保取样钻机的研制[J ].钻探工程,2021,48(12):101106.[4] 王士昭,王克虎,程林,等.液压节能策略在钻机开发中的应用[J ].地质装备,2021,22(6):1921.[5] 赵静一,王智勇,覃艳明,等.T L C 900型运梁车液压驱动系统与发动机功率匹配研究[J ].中国机械工程,2007,18(7):878881.[6] 王克虎,满国祥,王浩.基于P L C 控制的多功能土壤地下水调查采样机的研发[J ].地质装备,2021,22(2):1216,28.。
“PBA”洞桩法施工新型低净空反循环钻机的研制与应用
“PBa”洞桩法施工新型低净空反循环钻机的研制与应用柴喜元1,2 谭颖1,2 卢春阳1,21.衡阳中地装备探矿工程机械有限公司,湖南 衡阳 4210022.智能地质装备湖南省工程研究中心, 湖南 衡阳 421002摘要:为更好地满足“PBA”洞桩法钻孔桩施工环境条件和质量技术要求,以北京地铁12号线蓟门桥站为工程背景,研制了新型DKZ系列低净空反循环钻机,大大提高了施工工效。
本文重点介绍了钻机的总体方案、性能参数、技术特点及工程应用等情况。
关键词:反循环钻机; PBA洞桩法; 低净空; 地铁车站0 引言“PBA”洞桩法是浅埋暗挖法的一种类型,是在分析总结传统浅埋暗挖法优缺点的基础上,结合盖挖法的理念发展起来的一种地下工程施工方法[1]。
其原理就是将传统的地面框架结构施工方法和暗挖法进行有机结合,即施工时先暗挖导洞,然后在导洞内施作围护边桩、中柱、底梁和顶梁、顶拱,最后在由桩(Pile)-梁(Beam)-拱(Arch)共同形成的支撑框架体系内逐层向下开挖土体并施作内部结构,最终形成由外层边桩及顶拱初期支护和内层二次衬砌组合而成的永久承载体系[2]。
与其他类型的浅埋暗挖法相比,“PBA”洞桩法具有可以有效控制地表沉降、施工效率高、结构形式灵活、空间利用率高、环境影响小等优势,尤为突出地解决了地面施工场地受限的掣肘,目前是北京地区暗挖车站的一种主流工法[3]。
“PBA”洞桩法的施工过程主要包括四个阶段:导洞施工阶段、桩柱施工阶段、扣拱施工阶段、主体施工阶段。
导洞施工完成后,在导洞内进行钻孔桩施工。
桩柱为钻孔灌注桩,采用反循环钻机成孔,泥浆护壁,成孔后分节安装钢筋笼,灌注混凝土。
反循环钻机主要是在钻进过程中通过离心泵的抽吸作用,实现强力排渣。
该施工方法排渣、清渣容易,振动小、护壁好,施工扰动小。
目前,用于钻孔桩施工的反循环钻机,设备品种较多,大都是从传统的泵吸反循环工程施工和水井施工设备变型改造而来的,购置成本较低,基本能满足施工需要,但也存在制造粗糙、施工效率低、劳动强度大、维护费用高、成孔质量低及自动化、信息化程度较低等不足。
DT20型铁钻工电液控制系统的研制
2024年4月地质装备D T 20型铁钻工电液控制系统的研制孙军盈,朱江龙*,王春蕾,宋志亮,黄江涛,刘颖毅,马亦农(中地装(北京)科学技术研究院有限公司,北京 100120)摘 要:D T 20型铁钻工是一种安全㊁高效㊁全电液控制的自动化拧卸工具,其控制系统是在地质拧卸装备和电气自动化控制的基础上,开发的适合于地质行业专有工艺的铁钻工电液控制系统㊂本文主要介绍了D T 20型铁钻工的电气控制系统㊁液压系统和上卸扣的工艺与控制流程,为地质钻探自动化装备的相关研发人员提供一定的参考和借鉴㊂关键词:铁钻工;拧卸机具;自动化钻机;电液控制中图分类号:P 634 文献标识码:A 文章编号:1009282X (2024)02000705T h e d e v e l o p m e n t o f e l e c t r o -h y d r a u l i c c o n t r o l s y s t e m f o r D T 20i r o n r o u gh n e c k S U N J u n y i n g Z H U J i a n g l o n g *W A N G C h u n l e i S O N G Z h i l i a n g H U A N G J i a n gt a o L I U Y i n g y i M A Y i n o n gC h i n a G e o l o g i c a l E q u i p m e n t R e s e a r c h I n s t i t u t e C o L t d B e i j i n g 100120 C h i n a A b s t r a c t D T 20i r o n r o u g h n e c k i s a s a f e e f f i c i e n t a n d f u l l y e l e c t r o -h y d r a u l i c c o n t r o l l e d a u t o m a t i c u n s c r e w i n gt o o l I t s c o n t r o l s y s t e m i s d e v e l o p e d b a s e d o n g e o l o g i c a l u n s c r e w i n g e q u i pm e n t a n d e l e c t r i c a l a u t o m a t i o n c o n t r o l a n d i s s u i t a b l e f o r t h e i r o n r o u g h n e c k e l e c t r o -h y d r a u l i c c o n t r o l s y s t e m o f g e o l o g i c a l c o r e d r i l l i n g T h i s p a p e r m a i n l y i n t r o d u c e s t h e e l e c t r i c a l c o n t r o l s ys -t e m h y d r a u l i c s y s t e m m a k i n g -u p &b r e a k i n g -o u t p r o c e s s a n d c o n t r o l f l o w o f t h e D T 20i r o n r o u gh n e c k w h i c h c a n b e u s e d a s r e f e r e n c e f o r t h e r e s e a r c h a n d d e v e l o p m e n t p e r s o n n e l o f g e o l o g i c a l d r i l l i n g a u t o m a t i o n e q u i pm e n t K e yw o r d s i r o n r o u g h n e c k m a k i n g -u p a n d b r e a k i n g -o u t t o o l a u t o m a t i c d r i l l e l e c t r i c -h y d r a u l i c c o n t r o l s y s t e m 收稿日期:20230610基金项目:国家重点研发计划项目(编号:2018Y F C 0603402) 作者简介:孙军盈(1984-),男,高级工程师,从事地质钻探装备自动化开发工作,E -m a i l :ju n _i n @f o x m a i l .c o m ㊂ *通信作者:朱江龙(1974-),男,教授级高级工程师,从事地质钻探装备开发工作,E -m a i l :z h u j i a n g l o n g @c g e g.c o m .c n ㊂0 引言近年来,随着深孔地质钻探工程日益增多,钻具组合也变得越来越复杂,起下钻的频率也在不断增加,常规地质钻杆动力钳已逐渐无法满足钻机自动化发展的需求[1-4]㊂铁钻工作为动力钳的升级替代产品,具有操作简单㊁井口无需配置人员等特点,司钻可以通过电子手柄或遥控器进行远程操作,还可配合其他井口自动化工具实现一键上卸扣作业[6-12]㊂虽然石油钻机铁钻工发展较快且应用案例较多,但石油钻井与地质岩心钻探存在较大差异,其铁钻工无法直接应用于地质钻具拧卸㊂D T 20型铁钻工是国家重点研发项目 5000米地质岩心钻机关键技术与装备研制 的重要成果之一,适用于地质钻探过程中接卸钻杆㊁钻铤作业,其夹持范围为89~150m m ,且无需更换牙板㊂D T 20型铁钻工通过电液控制完成对各动作的控制,设备本体带有可编程逻辑控制器,既可以作为独立产品进行应用,也可以通过工业以太网与钻机配套使用,具有结构紧凑㊁布线简单㊁扩展性强等特点[13-17]㊂通过井场试验,对其控制功能和可靠性进行了验证,证明其可以节省钻井作业辅助时间㊁降低劳动强度和提高作业效率㊂1 D T 20铁钻工组成1.1 总体结构D T 20铁钻工主体主要包括以下部分:底座㊁升7孙军盈等:D T 20型铁钻工电液控制系统的研制第25卷 第2期降桅杆㊁桅杆滑架㊁伸缩臂㊁吊篮滑架㊁夹持卸扣器㊁液压总成㊁本体控制箱,见图1㊂图1 D T 20型铁钻工主机组成F i g .1 T h e m a i n c o m p o s i t i o n o f D T 20i r o n r o u gh n e c k 1.2 主要参数(表1)表1 D T 20型铁钻工主要参数T a b l e 1 T h e m a i n p a r a m e t e r s o f D T 20i r o n r o u gh n e c k 冲扣钳适应钻杆(钻铤)范围/m m 89~150冲扣钳最大卸扣转矩/(N ㊃m )33000冲扣钳最大上扣转矩/(N ㊃m )16000冲扣钳拧卸角度/(ʎ)30旋扣钳适应钻杆(钻铤)范围/m m 89~150旋扣钳最大旋扣转矩/(N ㊃m )4000旋扣钳最大旋扣速度/(r ㊃m i n-1)90铁钻工伸缩位移/m m 1850铁钻工升降位移/m m1000液压系统最大压力/M P a18液压系统最大排量/(L ㊃m i n-1)1402 电液系统控制方案D T 20型铁钻工液压控制阀采用高性能的电比例阀和开关阀,阀体带手动释放手柄㊂控制系统以西门子高性能的S 71200系列C P U 为控制核心,通过现场总线技术把本体控制器㊁遥控接收器和钻机远程控制器组成通信网络,实现远程司钻操作㊁就地应急操作㊁便携式遥控器操作㊁人机界面状态显示和参数设定等功能㊂2.1 液压系统原理D T 20型铁钻工液压系统控制的动作有背钳松紧㊁主钳拧卸扣㊁钳头伸缩㊁主钳松紧㊁旋扣钳松紧㊁钳头升降㊁旋扣器拧卸扣㊂铁钻工的三联电比例阀组和四联开关电磁阀组均通过电子技术进行控制㊂通过安装急停㊁液压缸位置和压力检测元件,系统具备精确控制扭矩㊁一键上卸扣功能㊂2.2 控制系统组成控制系统由本体控制箱㊁本体操作台㊁遥控器㊁传感器㊁急停及电磁阀等组成㊂本体控制箱固定在铁钻工本体立柱上,跟随升降机构同步运动,控制系统的核心P L C 安装在其内部㊂传感器㊁急停及电磁阀等信号接入本体控制箱,并通过现场总线与一体化司钻座椅进行通信连接㊂2.3 电液控制模式D T 20型铁钻工具备本地操作方式㊁远程一体化司钻座椅控制和便携式遥控器控制三种控制模式㊂本体控制箱预留总线接口,通过配置通信参数,铁钻工与一体化司钻座椅进行通信,司钻房一体化司钻座椅如图2所示㊂图2 一体化司钻座椅F i g .2 I n t e gr a t e d d r i l l e r s e a t 同时,为了独立运行铁钻工㊁方便副司钻更加灵活地控制,配置了如图3所示的便携式遥控器㊂图3 便携式遥控器F i g.3 P o r t a b l e r e m o t e c o n t r o l 本地操作采用液压手柄的操作台方式进行操控,操作台安装在钳头右侧(面对钳头),本体操作台82024年4月地质装备外形如图4所示㊂图4本体操作台F i g.4M a i n c o n s o l e2.4控制系统硬件设计铁钻工工作在指定的区域,需要考虑安装调试及维护的便捷性,故采用模块化设计,将铁钻工电气组成分为若干个模块,包括高防护等级的接插件㊁电源模块㊁P L C控制器㊁信号隔离及转换模块等,控制系统的总架构如图5所示㊂2.5软件控制策略铁钻工在切换冲扣与旋扣工艺时,需要单独控制冲扣钳的松开㊂夹持方式汇总为3条指令,分别是旋扣钳夹持与松开㊁背钳与冲扣钳同时夹持与松开㊁冲扣钳单独松开㊂所有动作包括:立柱升降㊁伸缩臂伸缩㊁旋扣钳夹持与松开㊁旋扣回转㊁冲扣钳夹持与松开㊁冲扣钳紧扣与松扣㊂图5控制系统架构F i g.5C o n t r o l s y s t e m f r a m e w o r k(1)手动上卸㊂手动控制铁钻工进行上卸扣作业是铁钻工最基本的功能要求,手动方式具有操作灵活的优势,也有因为操作步骤多㊁工序复杂及人为随意性带来的劣势,手动上卸扣操作步骤与自动上卸扣流程基本相同㊂(2)自动上卸㊂手动上卸扣时,需要操作人员实时观察上卸扣流程中每一步的运行状态,频繁的上卸扣操作十分消耗操作人员的精力[4-5]㊂D T20型铁钻工在保留手动操作的基础上,针对频繁㊁枯燥的上卸扣作业,研制了自动上卸扣功能,基于安全考虑,自动上卸扣的流程可以随时手动终止,自动上扣流程图如图6所示㊂图6自动上扣流程图F i g.6F l o w c h a r t f o r a u t o m a t i c m a k i n g-u p c o n n e c t i o n自动上扣操作时,立柱升降和伸缩臂的伸缩动作相对比较危险,在手动控制立柱高度和伸缩臂到位后,通过一体化司钻座椅或者遥控器发送自动上扣指令,铁钻工本体P L C将自动执行上扣流程程序,其中每一步的执行依赖主机本体安装的传感器进行判断,例如冲扣模式的背钳和冲扣钳的夹持,是通过各自的压力传感器判断是否夹紧,在夹紧压力达到设定压力后程序自动转到下一步作业程序㊂自动上扣功能在一定程度上减轻司钻人员工作强度,并能保证设定的拧紧力矩,从而减少人工操作所带来的拧紧力矩差异㊂自动卸扣流程与自动上扣流程基本相似㊂9孙军盈等:D T 20型铁钻工电液控制系统的研制第25卷 第2期2.6 HM I 人机界面基于铁钻工动作和传感器设置,兼顾实用性和易用性,开发出的HM I 界面如图7所示㊂图7 H M I 界面F i g.7 H M I i n t e r f a c e 界面按照功能类别分区如下:①界面切换及急停指示,该区域包括主界面与铁钻工界面的切换㊁本体和远程急停的状态显示㊂②运行点位显示,铁钻工在运行时,控制系统通过传感器检测到动作的运行状态㊂③实时显示冲扣钳的紧扣扭矩㊁松扣扭矩㊁旋扣转速和左右手柄的动作状态㊂④参数设定区域,包括操作模式选择功能㊁互锁保护及复位功能㊂默认情况下,操作模式为手动方式,自动方式的旋扣时间可以自行设定;系统复位功能可以将铁钻工的所有命令清除,在自动上卸扣时,可以随时暂停并恢复至初始步骤;系统互锁是在手动方式时,开启或关闭互锁保护功能,例如,伸缩臂和升降机构动作时需要判断旋扣钳和冲扣钳的状态,在传感器出现故障或者维护时,可以临时关闭系统互锁功能㊂⑤HM I 手动操控区,该区域包含了铁钻工的所有液压动作控制命令,区域内的控件只有在激活HM I 操作后才有效,在一体化座椅的手柄出现故障或者调试阶段可用此方式进行临时操控㊂⑥运行参数显示,该区域实时显示铁钻工本体运行的压力参数,包括系统压力㊁夹持压力等,方便司钻人员实时掌握铁钻工运行状态㊂3 施工应用D T 20型铁钻工通过厂内试验,并在国家重点研发项目 5000米智能地质钻探技术装备研发及应用示范 的示范工程中进行了生产试验,见图8㊂生产试验中,铁钻工整体运行良好,电液控制系统稳定㊁操作安全,具备一键上卸扣功能,符合设计要求,达到了设计预期,满足试验和生产需求,为钻探施工带来了极大的便利并提升了工作效率㊂图8 铁钻工现场施工F i g .8 I r o n r o u gh n e c k s o n s i t e 4 结语D T 20型铁钻工的开发研制,为地质岩心钻机的自动化发展做出了一次尝试㊂通过对其电液控制系统的研究和测试,为国内进一步对铁钻工的研制迭代提供借鉴和参考,主要结论归纳如下:(1)多操作模式可提高铁钻工的适配性和兼容性㊂本系统提供了本地操作台㊁远程一体化司钻台座椅㊁便携式无线遥控器三种控制模式㊂无论作为单个产品使用,还是集成在钻机控制系统中,多操作控制模式在集成灵活性㊁用户体验和安全性等方面都具有显著的优势㊂(2)精准控制扭矩,一键上卸扣功能能够减轻司钻人员的工作强度并降低潜在的施工风险㊂针对地质钻杆的特点,要求铁钻工必须能够精准控制扭矩,减少手动上卸扣的操作,尽量优化一键上卸扣流程,为司钻人员提供更加便捷和高效的操作体验,使整个钻探过程更加安全㊁高效和可靠㊂(3)D T 20型铁钻工虽然初步具备自动上卸扣功能,但仍需继续完善,如:自动上扣时,对钻杆的对扣精准判断;上卸扣时,对旋扣完成条件的判断㊁伸缩臂自动定位等㊂该系统的试制为适用于地质钻探的铁钻工国产化的发展提供一定的技术参考㊂参考文献(R e f e r e n c e s):[1] 张洪生,于昊,赵金峰.铁钻工的现状与展望[J ].石油矿场机械,2008,37(1):1216.12024年4月地质装备Z H A N G H o n g s h e n g,Y U H a o,Z H A O J i n f e n g.T h e s i t u a t i o n a n d f o r e c a s t o f i r o n r o u g h n e c k[J].O i l F i e l dE q u i p m e n t,2008,37(1):1216.[2]郝山波.I R N-120型铁钻工的研制[J].新型工业化, 2018,8(8):4750.H A O S h a n b o.D v e l o p m e n t o f I R N-120t y p e i r o n d r i l-l e r[J].T h e J o u r n a l o f N e w I n d u s t r i a l i z a t i o n,2018,8(8):4750.[3]李洪波,王洪川,赵磊,等.伸缩臂式铁钻工的研制[J].石油机械,2014,42(11):1619.L I H o n g b o,W A N G H o n g c h u a n,Z H A O L e i,e t a l.D e v e l o p m e n t o f t e l e s c o p i c-a r m i r o n r o u g h n e c k[J].C h i n a P e t r o l e u m M a c h i n e r y,2014,42(11):1619.[4]尹玉刚,高加索,陈丽琴,等.煤层气钻机旋转式轻便铁钻工的研制[J].石油机械,2014,42(2):1418.Y I N Y u g a n g,G A O J i a s u o,C H E N L i q i n,e t a l.R e-s e a r c h o n t h e r o t a r y l i g h t i r o n r o u g h n e c k f o r C B Md r i l l i n g r i g[J].C h i n a Pe t r o l e u m M a c h i n e r y,2014,42(2):1418.[5]张勇,刘清友,陈小伟.新型轻便式铁钻工的研制[J].石油矿场机械,2007,36(9):7375.Z H A N G Y o n g,L I U Q i n g y o u,C H E N X i a o w e i.D e-v e l o p m e n t o f n e w m o v a b l e r o u g h n e c k[J].O i l F i e l dE q u i p m e n t,2007,36(9):7375.[6]康亮,李亚伟,黎善猛,等.石油钻机管柱处理系统研究现状和发展趋势分析[J].液压气动与密封, 2019,39(5):110.K A N G L i a n g,L I Y a w e i,L I S h a n m e n g,e t a l.R e-s e a r c h p r e s e n t s i t u a t i o n a n d d e v e l o p m e n t t r e n d a n a l y-s i s o f p i p e l i n e h a n d l i n g s y s t e m f o r d r i l l r i g[J].H y-d r a u l i c s P ne u m a t i c s&S e a l s,2019,39(5):110.[7]李静.石油钻机自动化发展探讨[J].山东工业技术, 2015(9):7980.L I J i n g.D i s c u s s i o n o n t h e d e v e l o p m e n t o f o i l r i g a u t o-m a t i o n[J].S h a n d o n g I n d u s t r i a l T e c h n o l o g y,2015(9):7980.[8]南树歧,邹庆波,李伦,等.一体化铁钻工设计开发及关键技术研究[J].石油机械,2018,46(10): 1822.N A N S h u q i,Z O U Q i n g b o,L I L u n,e t a l.D e s i g n o f a n i n t e g r a t e d r o u g h n e c k a n d i t s k e y t e c h n o l o g i e s[J].C h i n a P e t r o l e u m M a c h i n e r y,2018,46(10):1822.[9]景佐军,徐小鹏,南树歧,等.铁钻工旋扣钳碳纤维滚轮优化与试验[J].机械工程师,2021(3):7578. J I N G Z u o j u n,X U X i a o p e n g,N A N S h u q i,e t a l.O p t i-m i z a t i o n a n d T e s t i n g o f t h e C a r b o n F i b e r R o l l e r i n a nI r o n R o u g h n e c k s S p i n n e r[J].M e c h a n i c a l E n g i n e e r, 2021(3):7578.[10]黄悦华,李洪波,王正磊,等.伸缩臂式铁钻工旋扣钳的设计研究[J].石油机械,2014,42(7):2831.H U A N G Y u e h u a,L I H o n g b o,W A N G Z h e n g l e i,e t a l.D e s i g n o f t e l e s c o p i c i r o n r o u g h n e c k s p i n n e r[J].C h i n a P e t r o l e u m M a c h i n e r y,2014,42(7):2831.[11]叶强,闫文辉,李慧莹,等.伸缩臂式铁钻工冲扣钳的设计[J].液压气动与密封,2018,38(6):811.Y E Q i a n g,Y A N W e n h u i,L I H u i y i n g,e t a l.D e s i g n o f i r o n r o u g h n e c k t o r q u e w r e n c h[J].H y d r a u l i c s P n e u-m a t i c s&S e a l s,2018,38(6):811. [12]赵金峰.T Z G216110型铁钻工控制系统的研制[D].兰州:兰州理工大学,2008.Z H A O J i n f e n g.D e v e l o p m e n t o f T Z G216110i r o n r o u g h n e c k c o n t r o l s y s t e m[D].L a n z h o u:L a n z h o uU n i v e r s i t y o f T e c h n o l o g y,2008.[13]朱永庆,罗磊,李峰,等.基于P L C的铁钻工电气系统设计[J].机械工程师,2015(8):8284.Z H U Y o n g q i n g,L U O L e i,L I F e n g,e t a l.E l e c t r i c a l s y s t e m d e s i g n o f i r o n d r i l l e r b a s e d o n P L C[J].M e-c h a n i c a l E n g i n e e r,2015(8):8284.[14]廖常初.S71200P L C编程及应用(第3版)[M].北京:机械工业出版社,2017.L I A O C h a n g c h u.S71200P L C P r o g r a m m i n g a n dA p p l i c a t i o n(3r d e d i t i o n)[M].B e i j i n g:C h i n a M a c h i n eP r e s s,2017.[15]李海军,王春光,刘宇.基于P L C的电液比例电气控制系统设计[J].内蒙古农业大学学报(自然科学版), 2010,31(2):269272.L I H a i j u n,W A N G C h u n g u a n g,L I U Y u.T h e d e s i g n o f e l e c t r o-h y d r a u l i c p r o p o r t i o n a l v a l v e o f E C S b a s e d o n P L C[J].J o u r n a l o f I n n e r M o n g o l i a A g r i c u l t u r a l U n i-v e r s i t y(N a t u r a l S c i e n c e E d i t i o n),2010,31(2): 269272.[16]何军国.铁钻工研制技术路线研究[J].河南科技, 2018(2):4749.H E J u n g u o.S t u d y o n T e c h n o l o g y o f I r o n R o u g h n e c kD e v e l o p m e n t R o u t e[J].J o u r n a l o f H e n a n S c i e n c e a n dT e c h n o l o g y,2018(2):4749.[17]廖常初,陈晓东.西门子人机界面(触摸屏)组态与应用技术(第2版)[M].北京:机械工业出版社,2008.L I A O C h a n g c h u,C H E N X i a o d o n g.S i e m e n s m a n-m a-c h i n e i n t e r f a c e(t o u c h s c r e e n)c o n f i g u r a t i o n a n d a p p l i-c a t i o n t e c h n o l o g y(2n d e d i t i o n).B e i j i n g:C h i n a M a-c h i n e P r e s s,2008.11。
50DB钻机技术方案
ZJ50/3150DB变频钻机技术方案中国石油化工集团公司ZJ50/3150DB钻机技术方案1ZJ50DB钻机总体设计原则1.1、钻机设计、制造依据“性能先进、工作可靠、运移方便、运行经济、满足HSE要求”的原则,整机性能和制造质量达到国际同类钻机的水平;1.2、钻机按SY/T5609-1999标准及相关标准进行设计和制造,主要部件(井架、底座、绞车相关部位、游车、大钩、天车、水龙头、转盘、泥浆泵相关部位等)符合API规范,并打API标记;自动化程度高;满足国际钻井市场要求。
1.3、符合HSE规范,在防爆、防渗漏、防腐(油漆)、防潮、耐高温、耐寒、防沙方面具有很高的适应性。
1.4、钻机布局合理,总体布局充分考虑防爆、消防、井控、材料供给、安装、使用、拆卸、维修方便等要求。
1.5、外观质量精美,实用性强,总体配置消灭薄弱环节,最大限度地满足5000m 高难度井、疑难井钻井工艺要求。
1.6、模块化设计,方便整体吊装运输及近距离调整,单件尺寸满足铁路和汽车运输的要求。
1.7、钻机配套的所有仪表为公英制(如MPa、Psi);设备及配套件的铭牌为中英文对照;产品有吊装标识和安全标识。
1.8、钻机成套采用国外引进与国内制造相结合方式,即:国内成熟、可靠的部件由国内制造,国内目前尚不能满足整机性能和要求的关键部件,(如:主发电机组、逃生器等)从国外进口。
同时负责总装配套,钻机设计质量、制造质量、外协件质量、装配质量、接口质量和整机性能。
1.9、充分考虑底座与井架的稳定性,有效防止井架与人字架的横向错位。
1.10、机电一体化设计,人机界面良好。
1.11、相关部位预留安装顶部驱动装置的接口;1.12、井场电气系统符合相关国际标准;1.13、井场内用房、泥浆罐、油水罐等有独立的接地保护措施(在底部焊接M14铜制螺栓接线柱并配螺母);1.14、液、气系统油管接头处采用可靠的接头;球阀为不锈钢;1.15、所有液、气、电线走向规范、安全可靠、布局合理。
ZJ40DBT沙漠快速移运拖挂钻机的研制

石油机械2017 年第 45 卷第11 期CHINA PETROLELM MACHINERY — 27 —◄钻井技术与装备►ZJ40DBT沙漠快速移运拖挂钻机的研制陈伟松王世魁胡军旺胡世林(兰州兰石石油装备工程股份有限公司)摘要:国内常规拖挂钻机普遍采用2段伸缩式结构,由于运输尺寸限制,通常井架的高度较 低,多数产品只适用于19m立根作业,不满足北非用户的使用要求。
为此,研发了 ZJ40D BT沙漠快速移运拖挂钻机。
该钻机采用5轴传动结构,将自动送钻系统和主电机动力输入系统集成在 一台减速器上,既减小了绞车宽度,又简化了传动结构;井架采用直立无绷绳3段伸缩式结构,满足28 m立根作业要求。
厂内和现场试验结果表明:钻机的各拖车移运平稳,刹车灵敏,泵的各 项指标满足要求;钻机能实现快速安装和移运功能,各项技术参数满足钻井作业要求。
该钻机的 研制成功为成套钻机的快速移动设计积累了经验。
关键词:快速移运;拖挂钻机;伸缩式;动力模块;快速拆分中图分类号:丁瓦922文献标识码:入如:10.16082/】.(:吐[^吼.100卜4578.2017.11.006Development of Model ZJ40DBT Desert Fast Moving Trailer RigChen Weisong Wang Shikui Hu Junwang Hu Shilin(Lanzhou LS Petroleum, Equipment Engineering Co. , Ltd.)Abstract:At present,the dual-section telescopic structure is widely used in the trailer rig.Due to the low height ol the derrick limited by the transportation,the majority ol the products are only suitable for 19 m stand operation and do not meet the requirements ol North African users.In view ol this,Model ZJ40DBT desert last moving trailer rig has been developed.The rig adopts a5-axis drive structure,and integrates the automatic drilling system and the main motor power input system in a reducer,so as to reduce the drawworks width and simplilies the transmission system.The mast is a triple-section telescoping upright type mast without guy line,which meets the 28 m stand operation requirements.The results ol the lactory and lield tests show that the trailers ol the rig moved smoothly,the brakes were sensitive,and the indexes ol the pumps meet the requirements.The drilling rig can realize quick assembly-disassembly and transportation lunction,and all ol the technical parameters meet the drilling operation requirements.The successlul development ol the rig has accumulated experiences l'or the last moving ol lull set ol rig.Keywords:last moving;trailer rig;telescopic;power module;quick disassembly0引百为了提高钻机的工作效率,控制油气资源的开 发成本,除了通过提高钻机性能,提高其智能化水 平之外,快速的转场搬家也是影响钻井作业效率的 重要因素,同时也是钻井设备厂家研究的重要内容 之一[|]。
适用于工务维修的多功能公铁两用车研制
汽车维修与保养NO.01202121车时代AUTO TIME适用于工务维修的多功能公铁两用车研制陈荣1魏刚2陈新华1王琰1雷张文1(1.宝鸡中车时代工程机械有限公司株洲分公司,湖南株洲412007;2.中国铁路太原局集团有限公司工务处,山西太原030013)摘要:实现铁路线路维护机具灵活机动、快速切入切出、减少用工数量、降低维护成本,一直是铁路线路维护工作努力的方向。
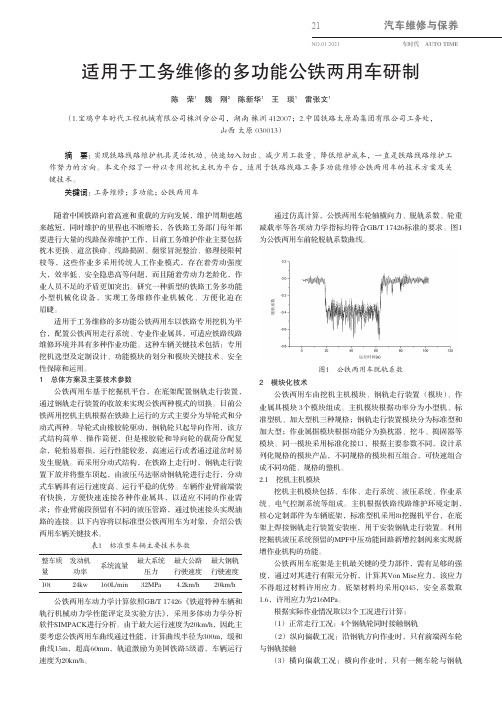
本文介绍了一种以专用挖机主机为平台,适用于铁路线路工务多功能维修公铁两用车的技术方案及关键技术。
关键词:工务维修;多功能;公铁两用车随着中国铁路向着高速和重载的方向发展,维护周期也越来越短,同时维护的里程也不断增长,各铁路工务部门每年都要进行大量的线路保养维护工作,目前工务维护作业主要包括枕木更换、道岔换砟、线路捣固、翻浆冒泥整治、修理侵限树枝等,这些作业多采用传统人工作业模式,存在着劳动强度大,效率低、安全隐患高等问题,而且随着劳动力老龄化,作业人员不足的矛盾更加突出。
研究一种新型的铁路工务多功能小型机械化设备,实现工务维修作业机械化、方便化迫在眉睫。
适用于工务维修的多功能公铁两用车以铁路专用挖机为平台,配置公铁两用走行系统、专业作业属具,可适应铁路线路维修环境并具有多种作业功能。
这种车辆关键技术包括:专用挖机选型及定制设计、功能模块的划分和模块关键技术、安全性保障和运用。
1总体方案及主要技术参数公铁两用车基于挖掘机平台,在底架配置钢轨走行装置,通过钢轨走行装置的收放来实现公铁两种模式的切换。
目前公铁两用挖机主机根据在铁路上运行的方式主要分为导轮式和分动式两种。
导轮式由橡胶轮驱动,钢轨轮只起导向作用,该方式结构简单、操作简便,但是橡胶轮和导向轮的载荷分配复杂,轮胎易磨损,运行性能较差,高速运行或者通过道岔时易发生脱轨。
而采用分动式结构,在铁路上走行时,钢轨走行装置下放并将整车顶起,由液压马达驱动钢轨轮进行走行,分动式车辆具有运行速度高、运行平稳的优势。
ZJ50JDB钻机并车传动装置的研制
ZJ50JDB钻机并车传动装置的研制马正选;陈庆飞【摘要】针对ZJ50JDB钻机用户的使用要求,克服传统皮带并车装置存在的底座结构复杂、运输性能差、三段式传绞车链条罩安装及拆卸费时费力等弊端,研制了底座直接落地、联组窄V带并车、整体链条箱驱动绞车的并车传动装置.整套装置设计为5个主要运输模块,降低了制造、运输及使用成本;可单独或联合驱动绞车和泥浆泵、带动节能发电机发电,实现对柴油机动力的合理分配;结构布局合理,传动平稳、柔和,操作方便、可靠,对环境适应性强.【期刊名称】《机械研究与应用》【年(卷),期】2016(029)005【总页数】3页(P133-135)【关键词】V带并车;运输;底座;驱动;链条箱【作者】马正选;陈庆飞【作者单位】兰州兰石石油装备工程有限公司,甘肃兰州730314;兰州兰石石油装备工程有限公司,甘肃兰州730314【正文语种】中文【中图分类】TE924随着石油钻井工业的发展,要求钻机不仅具有先进可靠的工作性能,而且具有良好的经济性能。
传统的机械钻机皮带并车装置在具有传动柔和、并车容易、制造简单、维护保养方便等优点的同时,也存在运输成本高、底座结构复杂、驱动绞车链条罩安装不方便等缺点[1]。
ZJ50JDB钻机是兰州兰石石油装备工程有限公司为西部钻探吐哈钻井公司生产的机电复合驱动钻机。
针对用户的实际使用要求,并在改进传统皮带并车装置的基础上,研制了新型的柴油机偶合器机组提供动力、联组窄V 带并车、整体链条箱驱动绞车的并车传动装置。
机械驱动钻机采用皮带并车是我国钻机的一大特色,主要是因为皮带传动结实简单,允许一定的传动打滑并具有超载时自动打滑的特性,能够起到安全保护作用,所以一直为我国油田工人所接受。
目前采用柴油机+液力偶合器正车减速箱作为动力源的技术已经相当成熟,相比于液力变矩器可大幅度节省燃油、简化钻机操作、提高钻机工效,并适用于机电复合驱动钻机[2]。
传统的皮带并车装置多采用三段式连接短节驱动绞车,这种结构密封效果较差,安装和拆卸劳动强度大,不利于井队搬家转场[3]。