激光陀螺漂移的研究方法_二_张梅
陀螺漂移
ⅠⅡΩΩ捷联惯导系统的导航的精度将会随着时问的推移而降低,因为无论采取什么手段,只要惯导器件误差不为零,那么惯导系统的导航误差就要随时间而积累,这是由惯性导航原理决定的。
而两种主要的惯性元件陀螺仪和加速度计中,加速度计的精度通常比陀螺仪高一个数量级以上,一般能够满足导航要求。
因此陀螺漂移的合理补偿就成为了提高导航精度的关键。
陀螺漂移补偿的方案有很多种,本文曾对几种漂移补偿方案进行了实验比较,并在此基础上提出了一种在一定条件下行之有效的加速度计辅助补偿法。
下面介绍曾实验的几种方案并详细介绍加速度计辅助补偿法。
方案一称为动态校零的漂移补偿方法,这种方法的背景是:基于对压电陀螺的研究,发现压电陀螺始终存在零位不重复性和零位不稳定性。
零位不重复性是指在静止状态下,不同时间给陀螺通电,陀螺的输出电压各不相同;零位不稳定性是指在静止状态下,给陀螺通电,陀螺的输出电压随时间的推移而变化。
动态校零分为针对零位不重复性的开机零位校正和针对零位不稳定性的零位漂移抑制过程。
零位信号是一个变化较缓慢的信号,在短时间内,可以看作直流分量。
因此,开机零位校正可以采用一个求和过程,对开机时静态陀螺信号进行求和,再将所求之和除以积分的时间得均值,即可将开机零位分离出来。
本文采用的是开机一分钟的均值。
而零位漂移抑制则需要通过对大量陀螺数据的分析,总结出其漂移规律,根据规律预置漂移速率,由漂移抑制算法消除零位的不稳定性。
但是这个方一案存在一些问题,首先零位信号是随时间漂移的,那么开机所求得的零位信号在之后的导航解算中很可能与实际情况不符合从而影响修正的效果;另外,预置漂移速率要求陀螺输出有较强的规律性,而经过大量实验数据的采集和分析,证实本实验采用的陀螺不具有很强的规律性,所以此种动态校零的修正方案在本文并不适用。
方案二本文曾提出过一种方案,称之为最小二乘拟合法。
是根据对采集的大量陀螺数据的分析,建立一个陀螺输出漂移与时间关系的最小二乘的模型,并将陀螺输出分为若干小的时间段,例如I0s(因为在相邻的短时间段内规律性可视为相同),由于时间短,可将每个时间段内的模型近似认为是Y=aX十b, Y为陀螺输出,X为时间变量,a, b为待辨识参数,利用本时间段采集的数据实时估计的陀螺输出漂移的最小二乘模型来预估下一时间段陀螺输出漂移值,将据此估计值下一时间段中对实际陀螺输出进行修正。
激光陀螺误差模型研究的开题报告

激光陀螺误差模型研究的开题报告
激光陀螺是一种精密惯性导航传感器,其主要原理是利用光纤陀螺的力学性质,通过激光测量陀螺转动角速度的变化,从而实现导航与定位控制。
然而,在实际应用中,激光陀螺的精度受到多种误差因素的影响,如系统噪声、温度漂移、结构松动等,因此需要深入研究其误差模型。
本课题旨在对激光陀螺误差模型进行研究,主要研究内容包括以下几方面:
1. 性能分析:对激光陀螺的基本性能进行分析,如精度、分辨率、带宽等,为后续误差分析打下基础。
2. 误差源识别:通过实验和理论分析,确定激光陀螺的误差来源,包括系统误差和随机误差等。
3. 建立误差模型:根据误差源的分析结果,建立激光陀螺的误差模型,在此基础上进行误差分析和评估。
4. 误差补偿:根据误差模型,采取相应的误差补偿方法,提高激光陀螺的精度和稳定性。
本研究将采用综合理论与实验方法,通过对激光陀螺系统性能及误差源的深入分析,建立完整的误差模型,并根据模型提出有效的误差补偿方法,为激光陀螺在导航
与定位领域的应用提供科学的理论和技术支持。
激光陀螺的分析
激光陀螺1960年,激光第一次出现在了美国加利福尼亚州的休斯实验室中,它的发明者梅曼也成为世界上第一个将激光引入实用领域的科学家。
不久之后,就因其独特的光学性质而被用于医疗、电子产品、距离勘测等领域,一直被人们称之为“最快的刀”、“最准的尺”、“最亮的光”。
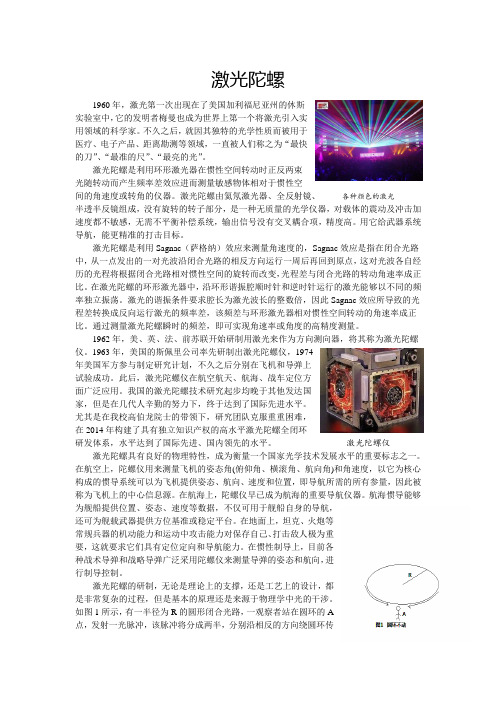
激光陀螺是利用环形激光器在惯性空间转动时正反两束光随转动而产生频率差效应进而测量敏感物体相对于惯性空间的角速度或转角的仪器。
激光陀螺由氦氖激光器、全反射镜、各种颜色的激光半透半反镜组成,没有旋转的转子部分,是一种无质量的光学仪器,对载体的震动及冲击加速度都不敏感,无需不平衡补偿系统,输出信号没有交叉耦合项,精度高。
用它给武器系统导航,能更精准的打击目标。
激光陀螺是利用Sagnac(萨格纳)效应来测量角速度的,Sagnac效应是指在闭合光路中,从一点发出的一对光波沿闭合光路的相反方向运行一周后再回到原点,这对光波各自经历的光程将根据闭合光路相对惯性空间的旋转而改变,光程差与闭合光路的转动角速率成正比。
在激光陀螺的环形激光器中,沿环形谐振腔顺时针和逆时针运行的激光能够以不同的频率独立振荡。
激光的谐振条件要求腔长为激光波长的整数倍,因此Sagnac效应所导致的光程差转换成反向运行激光的频率差,该频差与环形激光器相对惯性空间转动的角速率成正比。
通过测量激光陀螺瞬时的频差,即可实现角速率或角度的高精度测量。
1962年,美、英、法、前苏联开始研制用激光来作为方向测向器,将其称为激光陀螺仪。
1963年,美国的斯佩里公司率先研制出激光陀螺仪,1974年美国军方参与制定研究计划,不久之后分别在飞机和导弹上试验成功。
此后,激光陀螺仪在航空航天、航海、战车定位方面广泛应用。
我国的激光陀螺技术研究起步均晚于其他发达国家,但是在几代人辛勤的努力下,终于达到了国际先进水平。
尤其是在我校高伯龙院士的带领下,研究团队克服重重困难,在2014年构建了具有独立知识产权的高水平激光陀螺全闭环研发体系,水平达到了国际先进、国内领先的水平。
激光陀螺仪工作原理

激光陀螺仪工作原理嘿,朋友!你有没有想过,在我们这个科技飞速发展的时代,有那么多神奇的小玩意儿在默默地为我们的生活和各种高大上的工程助力呢?今天我就想跟你聊聊激光陀螺仪,这可是个超级厉害的家伙!我有个朋友,他是搞航空航天研究的。
有一次我去他的实验室,看到一个不大不小的装置,感觉很神秘。
我就好奇地问他:“这是啥呀?看起来这么酷。
”他就一脸自豪地告诉我:“这就是激光陀螺仪,可是我们这儿的宝贝呢!”当时我就蒙了,激光陀螺仪?这名字听起来就像是科幻电影里的东西。
那这个激光陀螺仪到底是怎么工作的呢?其实啊,你可以把它想象成一个超级精密的小宇宙。
激光陀螺仪里面有一个环形的光路,就像是一条环形的跑道一样。
激光呢,就像一个个超级小的运动员,在这个环形跑道里跑来跑去。
这里面的激光可不是一般的光哦。
它具有非常好的单色性和相干性。
这就好比是一群训练有素、纪律严明的士兵,行动起来整齐划一。
激光在这个环形光路里传播的时候,会产生一种叫做萨格纳克效应的现象。
这萨格纳克效应说起来有点复杂,简单来讲呢,就像是两个人在一个旋转的圆盘上沿着不同方向跑步。
如果圆盘不转,那两个人跑的路程是一样的。
但是一旦圆盘开始旋转,沿着圆盘旋转方向跑的那个人跑的路程就会比反方向跑的那个人长一些。
激光在旋转的环形光路里传播也是类似的道理。
那这个路程的差异怎么被检测到呢?这时候就要靠一些聪明的小设备啦。
当激光在环形光路里跑完一圈后,由于萨格纳克效应产生的相位差就会被检测出来。
这相位差就像是一个小暗号,告诉我们这个激光陀螺仪有没有转动,转动的速度和方向是怎样的。
我当时就问我朋友:“这检测出来的相位差能有多精确啊?”他眼睛放光地说:“那可相当精确了,就像你能精确地知道一根头发丝的千分之一的变化一样。
”激光陀螺仪的精度这么高,在很多地方都能大显身手。
比如说在飞机上,飞机在空中飞的时候,需要时刻知道自己的姿态和航向。
要是没有准确的陀螺仪,就像一个人在黑暗里走路没有方向感一样,那可太危险了。
激光陀螺简介讲解
激光陀螺仪现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。
传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。
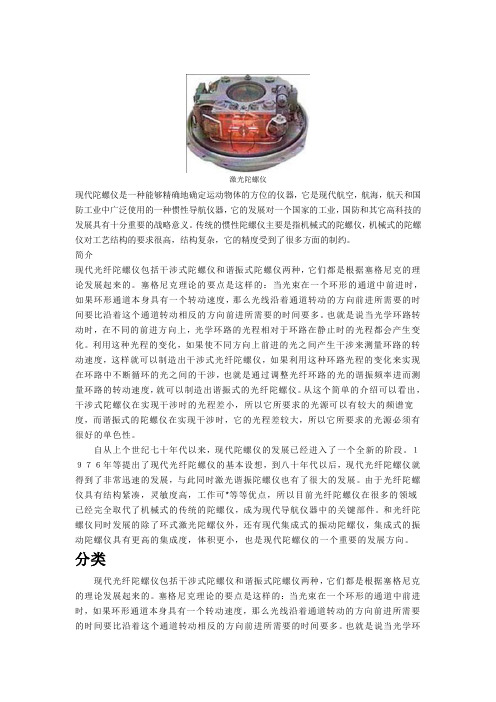
简介现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。
塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。
也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。
利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,这样就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。
从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。
自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
1976年等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。
由于光纤陀螺仪具有结构紧凑,灵敏度高,工作可*等等优点,所以目前光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。
和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
激光陀螺仪的研究报告
激光陀螺仪的研究报告
研究报告激光陀螺仪
1. 引言
激光陀螺仪是一种使用激光装置来测量旋转角速度的仪器。
它利用了激光光束在旋转物体表面上的干涉效应来测量物体的旋转速度。
本报告旨在对激光陀螺仪的原理、应用和研究进展进行探讨和总结。
2. 激光陀螺仪的原理
激光陀螺仪基于激光干涉技术,通过激光束在旋转物体表面上发生干涉,测量干涉光的相位差来推断物体的旋转角速度。
它通常由激光器、光纤、分束器、光学器件和光电探测器等部分组成。
3. 激光陀螺仪的应用
激光陀螺仪在航空航天、惯性导航、地震监测和姿态控制等领域有广泛的应用。
它可以用于飞机、导弹和卫星等飞行器的姿态控制和导航定位,提供精确的姿态测量和导航数据。
4. 激光陀螺仪的研究进展
随着光学技术的发展,激光陀螺仪的性能和精度不断提高。
目前,有许多研究正在进行,以改善激光陀螺仪的稳定性、精度
和抗干扰能力。
例如,采用了新颖的激光器设计、优化的光路结构和新型的光学器件等。
5. 结论
激光陀螺仪作为一种高精度、高稳定性的旋转角速度测量仪器,在航空航天和导航定位等领域有着重要的应用。
随着相关技术的不断发展,激光陀螺仪的性能将进一步提升,并拓宽其应用领域。
激光陀螺仪的原理和工作特性分析

激光陀螺仪的原理和工作特性分析激光陀螺仪是一种基于光学原理工作的惯性导航仪器,用于测量和监测物体的角速度和方向。
它利用激光束在光纤内传输的方式来感知物体的旋转运动,具有较高的精度和稳定性。
本文将对激光陀螺仪的原理、工作特性以及应用领域进行分析。
激光陀螺仪的原理主要基于两种光学现象:Sagnac效应和干涉测量。
首先是Sagnac效应。
当激光束沿一个封闭的环路进行传播时,如果该环路发生旋转,激光束在顺时针和逆时针方向上会遇到不同的光程差,这会导致干涉现象的产生。
根据Sagnac效应,光程差与旋转速度之间存在线性关系。
因此,通过测量干涉现象可以求得物体的旋转速度。
其次是干涉测量。
激光陀螺仪将激光束分为两束,一束顺时针传播,一束逆时针传播。
两束激光束再次汇聚时,会发生干涉。
这种干涉现象会造成光功率的变化,通过测量光功率的变化可以推导出物体的旋转速度。
激光陀螺仪的工作特性主要体现在以下几个方面。
首先是高精度和稳定性。
激光陀螺仪利用光学原理进行测量,相比传统的机械陀螺仪具有更高的测量精度和长期稳定性。
它可以提供高达0.01°/h的测量精度,适用于对角速度变化需求较高的应用场景。
其次是宽动态范围。
激光陀螺仪可以在较大的转速范围内工作,通常可以覆盖从几度每小时到数十万度每小时的运动速度。
这使得激光陀螺仪在高速旋转的应用中具有优势,例如飞行器导航、导弹制导等。
第三是快速响应和低延时。
激光陀螺仪可以实时获取角速度信息,并以快速响应的方式进行输出。
与传统陀螺仪相比,激光陀螺仪的响应时间更短,延时更小,这使得它在需要实时控制的应用中表现出色。
第四是无需标定和校准。
传统的机械陀螺仪需要进行定标和校准,以消除误差和漂移。
而激光陀螺仪不需要进行这些操作,能够在长期使用过程中保持较高的准确性和一致性。
最后是抗振动和抗冲击。
激光陀螺仪的光学系统和光纤耐受较强的振动和冲击,能够在恶劣环境下稳定工作。
这使得激光陀螺仪适用于需要抗干扰能力较高的应用,例如军事领域和航天领域。
我国激光陀螺制造技术简述
我国激光陀螺制造技术简述1.引言1.1 概述概述:激光陀螺是一种利用光学原理进行测量和稳定导航的高精度仪器。
它通过利用激光干涉的技术,实现对角速度的测量,从而使得惯性导航和导航系统的精度大幅提升。
激光陀螺具有很高的灵敏度和精确度,可以实现对角速度的精确测量,其稳定性和可靠性也远远超过了传统机械陀螺。
因此,激光陀螺在航天、航海、导航、定位等领域具有广泛的应用前景。
本文将简要介绍我国激光陀螺制造技术的发展现状和未来发展趋势。
首先,将介绍激光陀螺的原理和基本工作原理,然后重点探讨我国激光陀螺制造技术的研究与发展情况。
最后,将总结目前激光陀螺制造技术的现状,并展望我国激光陀螺制造技术的未来发展方向。
通过本文的介绍,读者可以了解到我国激光陀螺制造技术在航天、航海、导航、定位等领域的应用现状,同时也能够了解到我国激光陀螺制造技术的发展潜力和未来发展方向。
希望本文能对读者进一步了解和认识我国激光陀螺制造技术起到一定的帮助和指导作用。
1.2 文章结构文章结构部分的内容如下:文章结构:本文主要从概述、正文和结论三个方面介绍我国激光陀螺制造技术的发展情况。
首先,在引言部分中概述激光陀螺的基本原理和应用领域,并明确本文的目的。
接着,在正文部分分为两个小节,分别是激光陀螺的原理和我国激光陀螺制造技术的发展。
其中,激光陀螺的原理部分将详细介绍激光陀螺的工作原理和关键技术要点。
而我国激光陀螺制造技术的发展部分将回顾我国激光陀螺制造技术的历史发展过程,并重点介绍我国在激光陀螺制造方面取得的成就和创新。
最后,在结论部分,将总结激光陀螺制造技术的现状,概述我国激光陀螺制造技术的未来发展前景,并展望未来我国在激光陀螺制造领域的发展方向。
通过以上文章结构的安排,旨在系统而全面地介绍我国激光陀螺制造技术的发展情况,使读者能够全面了解激光陀螺的原理和我国在该领域的科技进步。
同时,结合发展趋势和前景,为我国激光陀螺制造技术未来的发展提供展望和思考。
线振动条件下激光陀螺捷联惯导附加漂移补偿技术
Z( )=HX( )+ ( z ) ;V( ) ~N( 0 , )( 8 )
技 术 。E — m a i l : z h o n g mi n g f e i l 1 @1 6 3 . t o m。
式 中 为姿态矩 阵 , =c , 为加 速度 计所测
得 的 比力 , n n 为导 航坐标 系 相对 于惯 性坐标 系 的角
1 5 2
科
学
技
术
激光陀螺捷联惯导在飞机等系统 中应用时 , 随 机振动是它主要 的力学环境¨ J 。在振动环境 中激 光陀螺捷联惯导系统的精度下降很大。一般认为振 动 包含 线 振动 和角 振动 两种 方式 。对线 振动 环境 中 激 光 陀螺捷 联惯 导 系统 的振 动 附加 漂移 进行 了有 效 估 计和 补偿 , 实 验表 明 , 在线 振 动环境 中对 激 光 陀螺 捷联 惯 导 系统进 行 附加 漂移 补偿 , 是 非 常有必 要 的 。 惯 性导 航 系统 的初始 对 准一 般分 为粗 对 准和 精
( ) =A( ) x( )+w( ) f 7 )
1 振 动 条 件 下 卡 尔 曼 滤 波 精 对 准 与 器 件 漂 移 估 计
1 . 1 对 准与测 漂 卡尔 曼滤 波模 型
W( ) ~N( 0 , Q) 式( 7 ) 中, 系 统激励 噪 声 向量 W( t 阵。
定 义导 航 坐 标 系 为 当地 地 理 坐 标 系 , 捷 联惯 导
系统 导航 误差 方程 可 以写 成
姿态 误差
2 0 1 4年 9月 2 4 日收 到 国家 自然科 学 基金 ( 6 1 2 0 3 1 9 9) 资助
A( )=
基于激光陀螺仪的航空器导航研究
基于激光陀螺仪的航空器导航研究随着航空工业的发展,航空器导航技术也取得了很大的发展。
导航技术的重要性也逐渐凸显出来。
精准、高效、安全的导航技术已经成为未来航空发展的关键。
而基于激光陀螺仪的导航技术,因其高精度、高效、长寿命等优点,逐渐成为当前航空领域中广泛采用的导航技术之一。
激光陀螺仪是一种采用光的旋转相位差来检测旋转角速度的仪器。
它与传统的机械陀螺仪相比,其精度更高,寿命更长,使用更加方便,不会受到外界干扰。
因此,在现代航空导航中,激光陀螺仪已经得到了广泛的应用。
在飞行器的导航系统中,激光陀螺仪通常被用来测量飞行器的姿态角、旋转角速度等参数。
通过测量这些参数,可以对飞行器的状态进行实时监测,提高导航系统的精度和可靠性。
同时,激光陀螺仪具有高度的抗干扰能力,可以有效地降低气候、电磁干扰等因素对导航系统的影响,从而提高导航系统的可靠性和稳定性。
而在实际应用中,航空器的导航系统中除了激光陀螺仪之外,还需要搭载其他传感器,如惯性导航系统(INS)、全球定位系统(GPS)等。
这些传感器可以协作工作,为导航系统提供更全面、更准确的数据。
其中,激光陀螺仪作为导航系统的核心组成部分,可以为其他传感器提供姿态角、旋转角速度等参数数据,保证整个导航系统的工作环境和工作状态的准确性。
虽然激光陀螺仪在航空导航中具有重要的地位,但是其的应用也受到一定的限制和挑战。
目前主要的问题是,激光陀螺仪的价格高,制造周期长,并且需要高精度的制造技术和设备。
此外,激光陀螺仪的精度也受到许多因素的影响,如温度、振动等。
因此,为了在实际应用中充分发挥激光陀螺仪的优势,需要在激光陀螺仪的制造过程中不断提高生产工艺和技术水平,同时在设计导航系统时充分考虑激光陀螺仪的工作环境和适应性问题。
总之,基于激光陀螺仪的航空器导航技术已经成为当前航空导航领域中的主要技术之一。
通过与其他传感器协同工作,可以为导航系统提供更高精度、更可靠的数据,提高导航系统的安全性和可靠性。
激光陀螺有什么用?工作原理是什么?
激光陀螺有什么用?工作原理是什么?激光陀螺具有很多重要的军事应用,随着技术进步,它的性能将会越来越好,完全替代传统的机电陀螺,在惯性导航定位、制导系统以及姿态控制和稳定系统中更好地体现和发挥核心作用,增强它们的导航定位、姿态控制、精确制导等能力,大幅提升以导弹为代表的精确打击武器的战斗力。
“陀螺原理”及传统陀螺先从陀螺说起。
许多人小时候一定玩过一种玩具陀螺“冰猴”。
脚尖身圆的“冰猴”放在地上,用一根绳子做的鞭子猛抽“冰猴”,“猴身”就能转起来,用鞭子抽得越狠,它就转得越飞快,不会倒下。
在日常生活中,我们也发现:如果一个物体旋转时速度很快,它就会稳定地立在一个地点不动,转速足够快的时候,即使平板倾斜一些,它仍然不会倒,并且转轴始终指向一个固定方向。
这就是物体的“定轴特性”。
科学家利用“定轴特性”制造出能定向和定位的陀螺仪,通过将陀螺定轴方向与运载体的轴心相比对,就能得出运载体的正确方向和瞬时位置。
而以陀螺仪为核心部件,进而组装出惯性导航系统或制导系统。
因此,陀螺是航天、航空、航海装备及很多武器装备在作战中不可缺少的定位和导航装置。
传统的惯性陀螺主要是指机电陀螺,但其稳定性以及定向与定位精度不够,不能满足现代武器精确打击的要求。
科研人员一直希望能找到更好的陀螺仪,帮助运载体精确定位与定向、稳定运行,更好地发挥武器的效能,激光陀螺无疑是一种很好的替代品。
何为激光陀螺?科技名词定义:激光陀螺,学名“环形激光器”。
实际上是一种无质量的光学陀螺仪,利用环形激光器在惯性空间转动时正反两束光随转动而产生频率差的效应,测定敏感物体相对于惯性空间的角速度或转角,进而测定物体方向等。
原理:一束光经分光器被分成完全相同的两束光后,进入同一环形光回路,分别沿顺时针方向和逆时针方向相向传播。
如果让光回路绕垂直于自身的轴旋转起来,这两束光之间会产生相位差,利用光的干涉性能测出相位差,进而得出光回路旋转的角速度。
如果光回路被制成一个环形激光器,其中传播的光就是方向性好、聚束性强、相干性优的激光,因此就形成了一个能通过敏感角速度来测定方向与姿态并具有快速寻北与稳定作用的激光陀螺。
激光陀螺的漂移
V (r )2 rdr 0
0
a
代入
1 0 V (1 b )V jP 2 a 2 a (1 e ) b a 2 2 a a (1 e )
0 jL
因为ห้องสมุดไป่ตู้
a
1 ,b ,于是,上式可写成 15 a
8S v v v r L
L R
(四)器件介绍
(五)四频差动陀螺的误差事项
对于左、右旋陀螺,考虑到比例因子与零漂项后,有
L L 2 v 2 (v2 v1 ) R R 2 v 2 (v3 v4 )
r L L L 0 L (1 A ) 2 KVA ( ) ( 2 1 ) R (1 AR )0 2 KVAR ( r )R ( ) 3 4
0 0 0 2 v H H
其中
r 2(1 A) ( A A )H 4KV A 2( )( 2 1 )
0 L R
L R A ( A A ) 2 H 2 H
由于行波2和3同是逆时针行波,所以两者相等,即有
( 2 1 ) ( 3 4 )
朗缪尔流零漂及差损零漂项倍增了!
增益介质将受纵向磁场塞曼效应的影响,使得增正、负旋光增益曲线 向相反方向移动 vB 2
1 B B 1 1 ku 2ku 2 B B 2 2 ku 2ku B 3 3 2ku 4 4 B 2ku
2 1.30 z0l02 l (1 2 )(0.15 2 ) 0.26 2 (1 2 ) a a 0 0 j g0 jVPj , ( j 1, 2)
激光陀螺】
激光陀螺激光陀螺仪的原理是利用光程差来测量旋转角速度( Sagnac 效应)。
在闭合光路中,由同一光源发出的沿顺时针方向和反时针方向传输的两束光和光干涉,利用检测相位差或干涉条纹的变化,就可以测出闭合光路旋转角速度。
激光陀螺仪的基本元件是环形激光器,环形激光器由三角形或正方形的石英制成的闭合光路组成,内有一个或几个装有混合气体(氦氖气体)的管子,两个不透明的反射镜和一个半透明镜。
用高频电源或直流电源激发混合气体,产生单色激光。
为维持回路谐振,回路的周长应为光波波长的整数倍。
用半透明镜将激光导出回路,经反射镜使两束相反传输的激光干涉,通过光电探测器和电路输入与输出角度成比例的数字信号。
激光陀螺仪需要突破的主要技术为漂移、噪声和闭锁阈值。
1. 激光陀螺仪的飘移激光陀螺仪的飘移表现为零点偏置的不稳定度,主要误差来源有:谐振光路的折射系数具有各向异性,氦氖等离子在激光管中的流动、介质扩散的各向异性等。
2. 激光陀螺仪的噪声激光陀螺仪的噪声表现在角速度测量上。
噪声主要来自两个方面:一是激光介质的自发发射,这是激光陀螺仪噪声的量子极限。
二是机械抖动为目前多数激光陀螺仪采用的偏频技术,在抖动运动变换方向时,抖动角速率较低,在短时间内,低于闭锁阈值,将造成输入信号的漏失,并导致输出信号相位角的随机变化。
3. 激光陀螺仪的闭锁阈值闭锁阈值将影响到激光陀螺仪标度因数的线性度和稳定度。
闭锁阈值取决于谐振光路中的损耗,主要是反射镜的损耗激光陀螺是在光学干涉原理基础上发展起来的新型导航仪器,成为新一代捷联式惯性导航系统理想的主要部件,用于对所设想的物体精确定位。
石英挠性摆式加速度计是由熔融石英制成的敏感元件,挠性摆式结构装有一个反馈放大器和一个温度传感器,用于测量沿载体一个轴的线加速度。
光纤陀螺三轴惯测组合由三个光纤陀螺仪和三个石英挠性摆式加速度计组成,可以实时地输出载体的角速度、线加速度、线速度等数据,具有对准、导航和航向姿态参考基准等多种工作方式,用于移动载体的组合导航和定位,同时为随动天线的机械操控装置提供准确的数据。
国外激光陀螺lasergyroscope的发展与应用

国外激光陀螺laser gyroscope的发展与应用来源:《国外惯性技术信息》2017年第4期,作者:国防科技大学张斌,罗晖,袁保伦,汪之国激光陀螺(RLG)是一种以萨格奈克(Sagnac)效应为基础的光学陀螺,主要用于运动载体的角运动(运动角速度或转动角度)测量。
1913年,法国科学家Sagnac进行了环形光路中外界转动引起干涉条纹变化的实验,并从理论上对此现象进行了解释,提出了著名的Sagnac效应:在环形闭合光路中,从某一观察点发出的一对光波沿相反方向运行一周后又回到该点时,这对光波的光程(或相位)将由于闭合光路相对于惯性空间的旋转而不同,其光程差(或相位差)与闭合光路的旋转角速度成正比。
在随后的很长一段时间里,由于没有合适的相干光源,光学Sagnac效应的研究基本上没有任何实用性进展。
直到1960年,世界上的第一台激光器诞生以后,激光陀螺作为激光技术的一个重要应用而成为世界各军事强国研究的热点。
1激光陀螺及其特点激光陀螺是由腔体(一般采用超低膨胀系数的微晶玻璃材料)和高质量反射镜构成的环形激光器,腔内运行的顺、逆时针激光能够以不同的频率独立振荡。
由于激光谐振条件的要求,Sagnac效应产生的光程差转换成了顺、逆时针运行激光的频率差,因此极大地提高了陀螺的响应灵敏度。
当激光陀螺固定在运动载体上,并相对于惯性空间以角速度Ω旋转时,该频率差为:,式中为标度因数,它由环形谐振腔的面积A、环路长度L以及激光波长λ决定。
激光陀螺的原理光路如图1所示,采用合光棱镜使其输出的顺、逆时针激光以微小夹角合并,经光电转换后可得到频率为∆v的拍频信号,从而实现载体转动角速度的测量。
图1 激光陀螺原理光路在实际的激光陀螺中,顺、逆时针激光通过反射镜的后向散射或环路中的非均匀损耗发生耦合,导致陀螺输入角速度小于某阈值时,频率差∆v为零,这种现象称为闭锁效应。
为了克服闭锁效应的影响,激光陀螺需要采取偏频措施,即在两束光波之间人为引入较大的频率差,使激光陀螺的工作区远离闭锁区域或者减少处于闭锁区域的时间。
激光陀螺仪的原理与应用

Basic principle 2
8
Rotation free condition, two beams of light transmission time, which is,
tCCW tCWL c2cR
M CCW
M
l
M ’
Under the condition of rotating,
CCCW
under the condition of low speed it is easy to closure.
Fiber optic
Ring laser gyro
gyro
④ The precision of RLG is high , but the price also high.
7
1
Background
4
Inertial components
Inertia measurement Inertial navigation Inertial stabilization Inertial guidance
Inertial device is the core of the inertial technology
Early 21st century, Litton company developed the mechanical dithering of four frequency differential laser gyro, the precision can reach 0.001 ° / h.
Now Honeywell's latest GG1389 precision of laser gyro has amounted to 0.00015 ° / h.
二频机抖激光陀螺温度漂移补偿的初步研究
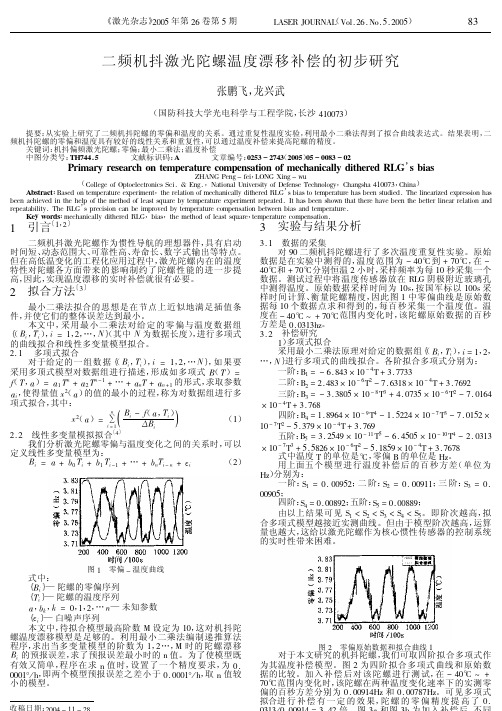
二频机抖激光陀螺温度漂移补偿的初步研究张鹏飞,龙兴武(国防科技大学光电科学与工程学院,长沙4l0073)提要:从实验上研究了二频机抖陀螺的零偏和温度的关系。
通过重复性温度实验,利用最小二乘法得到了拟合曲线表达式。
结果表明,二频机抖陀螺的零偏和温度具有较好的线性关系和重复性,可以通过温度补偿来提高陀螺的精度。
关键词:机抖偏频激光陀螺;零偏;最小二乘法;温度补偿中图分类号:TH744.5文献标识码:A文章编号:0253-2743(2005)05-0083-02Primary research on temperature compensation of mechanically dithered RLG’s biasZHANG Peng-fei,LONG Xing-wu(CoIIege of OptoeIectronics Sci.&Eng.,NationaI University of Defense TechnoIogy,Changsha4l0073,China)Abstract:Based on temperature experiment,the reIation of mechanicaIIy dithered RLG’s bias to temperature has been studied.The Iinearized expression has been achieved in the heIp of the method of Ieast sguare by temperature experiment repeated.It has been shown that there have been the better Iinear reIation and repeatabiIity.The RLG’s precision can be improved by temperature compensation between bias and temperature.Key words:mechanicaIIy dithered RLG,bias,the method of Ieast sguare,temperature compensation.l引言〔l,2〕二频机抖激光陀螺作为惯性导航的理想器件,具有启动时间短、动态范围大、可靠性高、寿命长、数字式输出等特点。
陀螺角度随机游走误差对旋转惯导系统的影响
陀螺角度随机游走误差对旋转惯导系统的影响高贤志【摘要】采用旋转调制技术可以抑制惯导系统误差随时间发散的趋势,然而,随机误差是限制旋转惯导系统精度继续提高的因素之一.对于高精度应用领域,陀螺角度随机游走误差也是惯导系统设计时考虑的因素.本文从对准和导航2个过程出发,研究陀螺角度随机游走误差对惯导系统的影响,结合激光陀螺实测数据进行艾伦方差分析,并利用实测结果进行仿真验证.结果表明,陀螺角度随机游走引起惯导系统振荡误差,0.0005°/√h的角度随机游走导航7天引起的位置误差大约1.3 nm.【期刊名称】《舰船科学技术》【年(卷),期】2014(036)009【总页数】4页(P122-124,135)【关键词】随机误差;角度随机游走;旋转惯导;艾伦方差【作者】高贤志【作者单位】海军驻天津707研究所军事代表室,天津300131【正文语种】中文【中图分类】U666.1旋转惯导系统通过双轴旋转机构带动IMU绕方位轴和横摇轴交替旋转,将器件误差调制成周期性信号,降低其对导航精度的影响[1-4]。
然而,并非所有的器件误差均能被旋转调制掉,不可调制的误差特性及其对调制效果的影响值得研究[5]。
针对这些不可调制误差,应分析出其对调制效果影响的严重程度,提出相应的应对措施,对能补偿或抑制的误差提出相应的方法[6]。
角度随机游走(Angle Random Walk,ARW)是一个非平稳的随机过程,均值为0,方差随时间变长而增大,相关性随时间增长[7],因此在长航时高精度导航的光学陀螺惯导系统中,这项指标就显得格外关键。
ARW误差对惯导系统的影响不能被旋转调制平均掉,其影响与非旋转惯导系统相同。
为了研究ARW误差对旋转惯导系统的影响,本文从ARW的含义出发,分析其对惯导系统对准和导航2个过程的作用机理,并验证该项误差对系统精度的影响。
ARW实质上是角速率中的白噪声积分成为角度后表现为随机的角度误差漂移,ARW与角速率白噪声这2种形式等效,满足以下关系[8]:式中:N(t)为角速率白噪声序列;n(t)为ARW序列。
激光陀螺仪发展史
激光陀螺仪发展史1962年,美、英、法、前苏联开始研制用激光来作为方位测向器,称之为激光陀螺仪,其原理是利用光程差来测量旋转角速度(Sagnac效应)。
1963年2月美国斯佩里公司的Macek和Davis宣布他们用环形行波激光器感测转速率获得成功,研制出世界上第一台环形激光陀螺实验装置,该装置的光程长达4米。
激光陀螺固有的闭锁效应以及零漂误差等给激光陀螺的研制带来许多困难,直到70年代,美国和法国的一些公司才陆续有激光陀螺产品问世。
1972年,霍尼韦尔公司研制出GG-1300型激光陀螺仪,经随后的改进后其零漂值达0.004o/h,尺寸大小为18cm×20cm×5cm,重量为3公斤。
1975年,霍尼韦尔公司又研制出机械抖动偏频的单轴激光陀螺,并首次成功地应用于战术飞机。
激光陀螺从此进入实用阶段。
并且成功地应用到战术导弹、直升机、潜艇、运载火箭等项目上。
直到80年代初期,激光陀螺才进入批量生产阶段。
1982年,霍尼韦尔公司研制的ARINC 704激光陀螺惯性基准系统正式投入民用航线使用,该系统使用的是GG1342激光陀螺。
现在,世界上的大中型民航客机(如波音系列和空中客车系列)基本上都安装了激光陀螺惯性基准系统,用于导航与稳定。
80年代后期,霍尼韦尔公司和Litton公司研制成功的激光陀螺产品零漂值优于0.01o/h,在航空领域获得广泛的应用。
90年代,他们又解决了激光陀螺的光学集成和数字化技术,使其更加易于工程实现。
1994年2月,日本H-2运载火箭呼啸升空,激光陀螺首次在航天运载器中取代挠性陀螺。
此外,法国Sextant公司研制的二频抖动激光陀螺,零漂值达0.005o/h,也用于阿里亚娜4火箭、阿里亚娜5火箭、军用机和远程导弹上。
90年代末期,美国Litton公司研制的四频差动激光陀螺,由于采用光学方法消除陀螺“闭锁”现象,所以又称为第二代激光陀螺,其零漂值已达0.001o/h,使激光陀螺精度又达到一个新的水平,其最佳时的零漂值已优于0.0003o/h,显然会成为纯惯性远程军用武器系统的优选对象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 17 卷第 3 期 2009 年 6 月
文章编号:1005-6734(2009)03-0350-06
中国惯性技术学报 Journal of Chinese Inertial Technology
Vol.17 No.3 Jun. 2009
σ
2 Allan
(τ
)
=
2[σ
2
(τ
)
−
σ
2
(2τ
)]
(文献[2]中式(34)),可得
Allan
方差:
∑ σ
2 Allan
(τ
)
=
m
Bm2
g
τ ( τm
,
ym )
+
3σ
2 Q
τ2
式中,
g(x, y) = 2[ f (x, y) − f (2x, y)]
(5) (6)
根据采样周期τ 与阻尼驰予时间常数τ m 比值的大小,可将各种阻尼振荡分为三类:
⎤ ⎥ ⎥⎦
1 τ2
+
m
Bm2
τ g(
τm
,
ym
)
(10)
一般情况下,式(9)(10)中的最后一项 m 很小,甚至不存在该项,因此,式(9)(10)比全面的公式(3)(5)大 大地简化了。
2 与传统方法比较
根据上一节的公式(9)(10)可见: 1) 与普通文献[3-6]中各种误差项相比,除1/ f 噪声项外,其他各项全部齐全。1/ f 噪声项在激光陀螺中如果存在, 那么根据式(2)进行积分,得到经典方差是 ∞ ,但是实际上经典方差并非 ∞ 。1/ f 噪声项在激光陀螺中可能并不存在。 2) 普通文献中的角速度随机游走、速率斜坡加上通常所谓“慢漂”[1]三种项在这里仅为慢漂的三个展开项,这三个 展开项之和必须大于零,但并不要求每一项都大于零(例如,经典方差 σ 2 (τ ) 的第一项大于零是肯定的,而第二项肯定小 于零)。这与实际上分析陀螺数据的经典方差时,τ 的一次方项为负值完全符合。而普
关 键 词: 激光陀螺;漂移;经典方差;Allan 方差;阻尼振荡
中图分类号:U666.1
文献标志码:A
Research method on drift of ring laser gyro (II)
ZHANG Mei, ZHANG Wen
(School of Opt-electrical Science and Engineering, National University of Defense Technology, Changsha 410073, China)
+
1
/
τ
2 m
+
SQ (
f
)
⎨ ⎪ ⎪SQ
(
f
)
=
⎧⎪(2πf ⎨
)2σ
Q2τ
,
f ≤1/ 2τ
⎪⎩
⎪⎩ 0,
f > 1/ 2τ
(1)
我们知道,经典方差与其频域表达式的关系式[2][3]为:
∫ σ 2 (τ )
=
2
∞
0 SΩ ( f
sin2 (πf τ )
)
df
(πf τ )2
(2)
将式(1)代入式(2),得到经典方差:
效应的方差,用严格的公式计算是复杂的,实际计算时可根据具体情形作可行的近似,从而得到简单可用的激
光陀螺的噪声的时域表达式。假设激光陀螺中存在的噪声由各种阻尼振荡组成,符合自然界的普遍规律,更主
要的是,该假设得到了实验的验证,逻辑自洽,彻底地解决了通常文献的分析方法存在的矛盾。因此,用阻尼
振荡的方法来研究激光陀螺漂移是合理的。
6) 该分析方法既适用于陀螺,也适用于测控陀螺的电路,所以由电路造成的效应也包括在内。从文献[1]表 2 的例
3 与例 4 比较来看,电路的效应非常明显,性能不好的电路可使 a0 、a1 、a2 、a3 系数作很大变化。
第3期
张梅等:激光陀螺漂移的研究方法(二)
353
3 实验数据分析
1) PSD
首先,对实验数据进行 Fourier 分析,得到其功率谱密度。然后,根据该功率谱密度的特点来选用适合的拟合模型。
上一篇文章[1]指出,在分析激光陀螺的漂移时,仅用 Allan 方差的方法是不行的,应主要以经典方差来衡量陀螺的性
2
∑ 能。并指出,通常文献用 SΩ ( f ) = bn2 f n 形式作为 PSD 推导出 Allan 方差后,产生了一些逻辑上不合理的结果,有些 n = −2
则与实验不符合,只有找一种能彻底解决这些问题的方法,才能够对激光陀螺的漂移进行准确可靠的分析。
+1
⎞ ⎟ ⎠
1 τ
+
∑ ∑ ⎡⎛
⎢⎜ ⎢⎣⎝ m′′
τ B ( y 2 2 2 m′′ m′′ m′′
(
y2 m′′
+ 1)
−
2
1)
⎞ ⎟ ⎠
+
2σ
2 Q
⎤ ⎥ ⎥⎦
1 τ2
+
m
Bm2
f
τ ( τm
,
ym
)
(9)
公式(5)可写成:
∑ ∑ ∑ σ
2 Allan
(τ
)
=
⎛ ⎜
⎝
m′
Bm2 ′ 3τ m′
1) 慢漂类: x = τ /τ m << 1, xy << 1
这类阻尼振荡的驰予时间τ m 相对采样周期τ 要长得多,衰减很慢。此时,函数 f (x, y) 和 g(x, y) 的形式可简化为:
⎧ ⎪⎪ ⎨ ⎪ ⎪⎩
f
(x, y) ≅ g(x, y)
1 2 ≅
−
ቤተ መጻሕፍቲ ባይዱx 3
x 6 +
− ( y 2 −1)x 24
下面列出一些功率谱密度有代表性的数据例子。
图 1 为数据例子的功率谱密度图,其中,例 1 至例 4 为四频陀螺数据的功率谱密度图,例 5 至例 7 为机抖陀螺的功
率谱密度图。从能量角度看,前面 5 例的主要能量集中在低频部分,应该主要根据低频部分功率谱密度的特点考虑拟合
模型。第 6 例的主要能量集中在一个很宽的频带,第二个能量集中区域也在低频部分。第 7 例的能量分布随着频率增加
⎞⎟τ ⎠
+
⎛ ⎜ ⎝
m′
Bm2 ′
( ym2 ′
4τ
2 m′
−1)
⎞⎟τ ⎠
2
+
⎛ ⎜ ⎝
m′′
τ B2 m′′ m′′
y2 m′′
+1
⎞ ⎟ ⎠
1 τ
+
∑ ∑ 3 ⎡⎛ ⎢⎜ 2 ⎢⎣⎝ m′′
τ B ( y 2 2 2 m′′ m′′ m′′
−
(
y2 m′′
+ 1)2
1)
⎞ ⎟ ⎠
+
2σ
2 Q
4) 快漂展开的另一项是1/τ 项,此项系数必大于零,可按传统称之为角随机游走项。白噪声必然产生1/τ 项,但是 否“ m′′ ”项所包含的快漂类阻尼振荡均为白噪声?目前还无法回答,是将来应该大力研究的重要问题。
5) 式(9)(10)可写成:
∑ ⎧
⎪ ⎪
σ
2 (τ
)
=
a0
+
a1 τ
+
a2 τ2
+ a3τ + a4τ 2 +
第3期
张梅等:激光陀螺漂移的研究方法(二)
351
∑ Bm2 /τ m
m
(ω
−
ωm
)2
+
1
/
τ
2 m
式中, ω = 2πf , ωm = 2πfm 。由于量化噪声不属阻尼振荡之列,须另外处理,当加上量化噪声[1][3]后,PSD 为:
∑ ⎧
⎪SΩ ( f ) = ⎪⎪
m
(ω
Bm2 /τ m
− ωm
)2
快漂类阻尼振荡写成“ m′′ ”,不快不慢类仍用“ m ”,则式(3)可写成:
∑ ∑ ∑ ∑ σ 2 (τ ) =
m′
Bm2 ′ 2
⎛ −⎜
⎝
m′
Bm2 ′ 6τ m′
⎟⎞τ ⎠
−
⎛ ⎜ ⎝
m′
Bm2′ ( ym2 ′ −1)
24τ
2 m′
⎟⎞τ ⎠
2
+
⎛ ⎜ ⎝
m′′
τ B2 m′′ m′′
y2 m′′
m
Bm2
f
τ ( τm
,
ym
)
⎨
∑ ⎪⎪⎩σ
2 Allan
(τ )
=
a1 τ
+
3 2
a2 τ2
−
2a3τ
−
6a4τ
2
+
m
Bm2
g
τ ( τm
,
ym
)
(11)
式中: a0 , a1 ,τ m , ym ≥ 0 ; a3 < 0 ; a2 , a4 不确定,而普通文献要求 a2 一定为正值、 a4 一定为负值,是不恰当的。
激光陀螺漂移的研究方法(二)
张 梅,张 文
(国防科技大学 光电科学与工程学院,长沙 410073)
摘要:在研究环形激光陀螺的漂移时,通常文献的分析方法存在诸多矛盾。针对这种研究方法的不合理性,提
出用阻尼振荡的方法来研究陀螺的漂移,属原创性革新。用阻尼振荡的频域表达式,加上采样量化噪声的频域