随驾驶员视线改变视角的车辆盲区投影系统的制作技术
工程车盲区保障方案
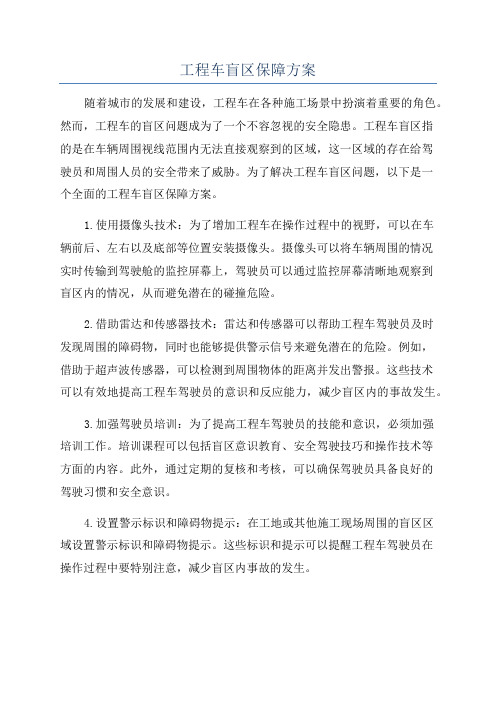
工程车盲区保障方案随着城市的发展和建设,工程车在各种施工场景中扮演着重要的角色。
然而,工程车的盲区问题成为了一个不容忽视的安全隐患。
工程车盲区指的是在车辆周围视线范围内无法直接观察到的区域,这一区域的存在给驾驶员和周围人员的安全带来了威胁。
为了解决工程车盲区问题,以下是一个全面的工程车盲区保障方案。
1.使用摄像头技术:为了增加工程车在操作过程中的视野,可以在车辆前后、左右以及底部等位置安装摄像头。
摄像头可以将车辆周围的情况实时传输到驾驶舱的监控屏幕上,驾驶员可以通过监控屏幕清晰地观察到盲区内的情况,从而避免潜在的碰撞危险。
2.借助雷达和传感器技术:雷达和传感器可以帮助工程车驾驶员及时发现周围的障碍物,同时也能够提供警示信号来避免潜在的危险。
例如,借助于超声波传感器,可以检测到周围物体的距离并发出警报。
这些技术可以有效地提高工程车驾驶员的意识和反应能力,减少盲区内的事故发生。
3.加强驾驶员培训:为了提高工程车驾驶员的技能和意识,必须加强培训工作。
培训课程可以包括盲区意识教育、安全驾驶技巧和操作技术等方面的内容。
此外,通过定期的复核和考核,可以确保驾驶员具备良好的驾驶习惯和安全意识。
4.设置警示标识和障碍物提示:在工地或其他施工现场周围的盲区区域设置警示标识和障碍物提示。
这些标识和提示可以提醒工程车驾驶员在操作过程中要特别注意,减少盲区内事故的发生。
5.定期车辆维护和检查:定期的车辆维护和检查是保证工程车安全运行的关键。
车辆的制动系统、转向系统和视觉设备等必须经常检查和维护,确保其工作正常。
如果发现任何问题,应及时修理或更换。
总之,保障工程车盲区的安全需要多种手段的综合应用。
使用摄像头、雷达和传感器等技术,加强驾驶员培训,设置警示标识和障碍物提示,以及定期车辆维护和检查,这些都是有效的保障措施。
只有通过全方位的保障方案,才能最大程度地减少工程车盲区带来的安全隐患,确保人员和车辆的安全。
盲区监测系统(BSD)研发建设方案(二)

盲区监测系统(BSD)研发建设方案1. 实施背景随着中国交通行业的快速发展,交通事故频发,其中很大一部分是由于车辆在行驶过程中对周围环境的盲区所导致。
为了减少交通事故,提高道路安全性,急需研发一种能够实时监测车辆周围环境的盲区监测系统(BSD)。
2. 工作原理BSD系统主要依靠先进的传感器技术和数据处理算法来实现。
传感器包括毫米波雷达、摄像头和超声波传感器,它们能够实时收集车辆周围的信息。
数据处理算法基于机器学习和深度学习技术,对收集到的数据进行处理和分析,识别出周围的车辆、行人和其他障碍物,进而实现对盲区的监测。
3. 实施计划步骤1.需求分析:明确系统的功能需求和技术指标。
2.硬件设计:设计并采购合适的传感器和处理器。
3.软件研发:开发数据处理算法和用户界面。
4.系统集成:将硬件和软件进行集成,并进行初步测试。
5.实地测试:在真实环境中进行测试,并根据反馈进行改进。
6.批量生产:经过验证后,开始批量生产。
4. 适用范围该系统适用于各类车辆,包括私家车、公交车、货车等。
通过BSD系统,驾驶员可以实时了解车辆周围的盲区情况,避免事故的发生。
此外,它也可以用于无人驾驶车辆,提高其行驶的安全性和稳定性。
5. 创新要点1.采用了多传感器融合技术,提高了监测的准确性和可靠性。
2.采用了先进的机器学习和深度学习算法,能够自适应地识别各种环境下的障碍物。
3.系统具有高实时性和低延迟性,能够满足实时监测的需求。
4.用户界面友好,易于操作和理解。
6. 预期效果通过BSD系统的应用,预计能够减少交通事故发生率至少30%,提高道路安全性和交通流畅度。
此外,该系统还能够提高驾驶员的驾驶体验和安全感。
7. 达到收益1.提高道路安全性,减少交通事故带来的经济损失和社会影响。
2.提高车辆的运行效率和节省能源消耗,降低运营成本。
3.为驾驶员提供更加安全和舒适的驾驶体验。
4.为无人驾驶技术的推广和应用提供支持。
8. 优缺点优点:1.高准确性和实时性:能够准确识别车辆周围的障碍物,并及时发出警告。
高德盲区会车预警技术原理-概述说明以及解释

高德盲区会车预警技术原理-概述说明以及解释1.引言1.1 概述高德盲区会车预警技术是一种基于高德导航系统的先进驾驶辅助系统,旨在提高车辆在行驶过程中的安全性和驾驶体验。
该技术利用车辆上安装的多功能摄像头和雷达传感器,能够实时监测车辆周围的交通情况,并通过高德导航系统进行数据分析和处理,提供准确及时的会车预警信息。
在日常驾驶中,盲区会车是很常见的情况,特别是在弯道、路口、高速公路出入口等场景下。
驾驶人员往往难以及时观察到盲区内的其他车辆,容易造成事故的发生。
而高德盲区会车预警技术通过智能化的算法和高精度的地图数据,能够准确地检测到盲区内的车辆,并向驾驶人员提供音频或视觉的警告,以提醒驾驶人注意前方的交通情况,避免发生碰撞或危险。
该技术的原理主要包括以下几个方面:1. 多功能摄像头:车辆上安装的多功能摄像头可以实时捕捉周围环境的图像信息,并通过算法进行图像识别和分析。
它可以识别并跟踪其他车辆在盲区内的移动,并生成相应的警告信号。
2. 雷达传感器:车辆上的雷达传感器能够检测到盲区内的物体,并计算出与车辆的距离和速度等信息。
通过与高德导航系统的数据融合,可以实现对盲区内车辆的精准检测和预警。
3. 高德导航系统:高德导航系统是整个技术的核心,它通过与车辆上安装的设备进行实时数据交互,获取车辆位置、行驶路线等信息,结合地图数据和交通情况,进行会车预警的处理和分析,并及时向驾驶人员提供相关的预警信息。
通过以上原理的结合,高德盲区会车预警技术可以实现对车辆周围交通情况的全面监测和预警,有效提高驾驶安全性和减少事故发生的概率。
在未来,随着车辆智能化和无人驾驶技术的发展,该技术有望在自动驾驶领域发挥更大的作用,为驾驶人员提供更安全、便捷的行驶体验。
1.2 文章结构文章结构部分的内容可以参考以下写法:文章结构部分的目的是为读者提供一个清晰的导向,使其能够更好地理解本文的内容和结构安排。
本文主要分为三个部分,即引言、正文和结论。
探究“大货车驾驶员的视觉盲区”

工程:确定项目目标,项目验收方案
数学:角度与弧度的计算
乐高教具
本学习活动需要使用“45544机器人EV3套装”组装成大货车,模拟大货车在日常行驶的轨迹,利用传感器,测量驾驶员的视觉盲区,分析造成交通事故的主要原因。
学生探究的问题
1、当大货车静止时驾驶员的视觉范围
(在探究活动中注意大货车的轮子与车体的比
例,关注车长和车高)
2、当大货车转弯时,视觉范围如何变化
(分小组进行探究,如较长的货车,弯度越大…...,视觉盲区越…...。
也可以分析一下为什么大货车转弯时容易发生交通事故)。
Micro_LED_车灯投影光学系统设计与优化

文章编号 2097-1842(2024)01-0089-11Micro LED 车灯投影光学系统设计与优化李香兰1,2,金 霞3,吕金光1,郑凯丰1 *,陈宇鹏1,赵百轩1,赵莹泽1,秦余欣1,王惟彪1,梁静秋1 *(1. 中国科学院长春光学精密机械与物理研究所, 吉林 长春 130033;2. 中国科学院大学, 北京 100049;3. 中国电子科技集团公司第四十六研究所, 天津 300220)摘要:本文提出了一种基于Micro LED 阵列的车灯投影方案,设计了以像素尺寸为80 μm×80 μm 的200×150白光Micro LED 阵列作为显示光源,视场角为16°×34°的车灯投影光学系统,并对物面倾斜角度和光学系统结构进行了优化。
此外,分别采用反向畸变处理方法和像素灰度调制方法用以解决车灯投影图像的梯形畸变和照度均匀性问题,并搭建了投影实验平台,对图像校正方法进行了验证。
实验结果表明:校正后图像梯形畸变系数p 1,p 2分别从0.093 2和0.368 0下降至0.083 5和0.037 3,像面照度均匀性从83.2%提高到93.2%。
本文通过对基于Micro LED 的倾斜投影车灯光学系统进行优化设计及采用图像校正方法,实现了高光效、低畸变的车灯投影。
关 键 词:车灯投影光学系统;光学设计;Micro LED ;照度均匀性;梯形畸变中图分类号:TP394.1;TH691.9 文献标志码:A doi :10.37188/CO.2023-0063Design and optimization of Micro LED vehicle lightprojection optical systemLI Xiang-lan 1,2,JIN Xia 3,LV Jin-guang 1,ZHENG Kai-feng 1 *,CHEN Yu-peng 1,ZHAO Bai-xuan 1,ZHAO Ying-ze 1,QIN Yu-xin 1,WANG Wei-biao 1,LIANG Jing-qiu 1 *(1. Changchun Institute of Optics , Fine Mechanics and Physics , Chinese Academy ofSciences , Changchun 130033, China ;2. University of Chinese Academy of Sciences , Beijing 100049, China ;3. The 46th Research Institute of China Electronics Technology Group Corporation , Tianjin 300220, China )* Corresponding author ,E-mail : *********************.cn ; ****************.cnAbstract : This article presents a vehicle headlight projection scheme based on Micro LED arrays. A 200×150 white Micro LED array with pixel size of 80 μm×80 μm is designed as the display light source, and a headlight projection optical system with a field of view of 16°×34° is designed. The object plane tilt angle and optical system structure are optimized. In addition, the inverse distortion processing method and pixel grayscale modulation method are used to solve the trapezoidal distortion and uniformity of illumination of the headlight projection image. A projection experimental platform is built to verify the image correction收稿日期:2023-04-11;修订日期:2023-05-04基金项目:国家重点研发计划(No. 2022YFB3604702);吉林省科技发展计划(No. 20200401056GX )Supported by National Key Research and Development Program (No. 2022YFB3604702); Jilin Province Sci-ence and Technology Development Plan (No. 20200401056GX)第 17 卷 第 1 期中国光学(中英文)Vol. 17 No. 12024年1月Chinese OpticsJan. 2024method. Experimental results show that after correction, the image trapezoidal distortion coefficients p1 and p2 decrease from 0.093 2 and 0.368 0 to 0.0835 and 0.0373, respectively, and the image plane illumination uniformity increases from 83.2% to 93.2%. This article achieves high light efficiency and low distortion of vehicle headlight projection by optimizing the design of the inclined projection headlight optical system based on Micro LEDs and using image correction methods.Key words: headlight projection optical system;optical design;Micro LED;illumination uniformity;trapezoidal distortion1 引 言随着自动驾驶、智能网联等技术的兴起,汽车产品不断向“信息化、智能化、安全化”发展。
车辆盲区系统设计方案
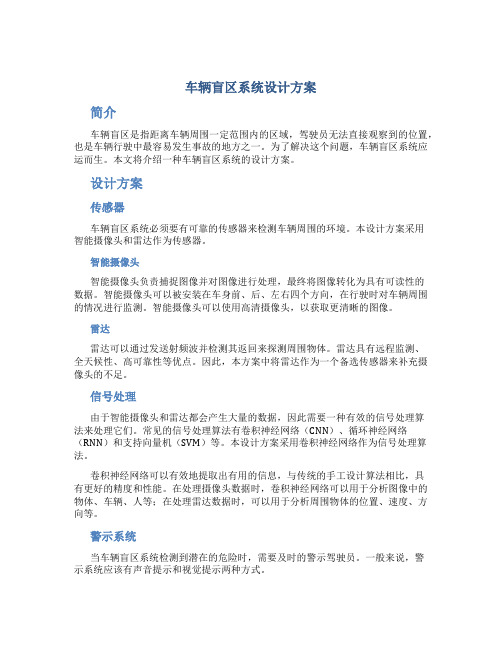
车辆盲区系统设计方案简介车辆盲区是指距离车辆周围一定范围内的区域,驾驶员无法直接观察到的位置,也是车辆行驶中最容易发生事故的地方之一。
为了解决这个问题,车辆盲区系统应运而生。
本文将介绍一种车辆盲区系统的设计方案。
设计方案传感器车辆盲区系统必须要有可靠的传感器来检测车辆周围的环境。
本设计方案采用智能摄像头和雷达作为传感器。
智能摄像头智能摄像头负责捕捉图像并对图像进行处理,最终将图像转化为具有可读性的数据。
智能摄像头可以被安装在车身前、后、左右四个方向,在行驶时对车辆周围的情况进行监测。
智能摄像头可以使用高清摄像头,以获取更清晰的图像。
雷达雷达可以通过发送射频波并检测其返回来探测周围物体。
雷达具有远程监测、全天候性、高可靠性等优点。
因此,本方案中将雷达作为一个备选传感器来补充摄像头的不足。
信号处理由于智能摄像头和雷达都会产生大量的数据,因此需要一种有效的信号处理算法来处理它们。
常见的信号处理算法有卷积神经网络(CNN)、循环神经网络(RNN)和支持向量机(SVM)等。
本设计方案采用卷积神经网络作为信号处理算法。
卷积神经网络可以有效地提取出有用的信息,与传统的手工设计算法相比,具有更好的精度和性能。
在处理摄像头数据时,卷积神经网络可以用于分析图像中的物体、车辆、人等;在处理雷达数据时,可以用于分析周围物体的位置、速度、方向等。
警示系统当车辆盲区系统检测到潜在的危险时,需要及时的警示驾驶员。
一般来说,警示系统应该有声音提示和视觉提示两种方式。
对于视觉提示,可以通过车载显示器来显示当前车辆周围环境的图像,包括标记潜在风险区域等。
当潜在风险区域被检测到时,这些区域可以被突出显示。
对于声音提示,当车辆进入潜在风险区域时,系统应该发出警报声。
在这里,设计可以选择不同的提示音来提醒驾驶员。
系统实现车辆盲区系统需要通过车载电脑来实现。
车载电脑具有数据存储、信号处理、图像显示、声音输出等功能。
该系统还可以集成到车辆安全带、倒车影像系统等功能,从而提高整个汽车的安全性。
AGV视觉导航设计方案-经典

AGV搬运机器人视觉导航方案AGV(Automated Guided Vehicle,AGV)作为现代制造系统中的物料传送设备已经得到了广泛应用。
从理论上看,视觉导引AGV具有较好的技术应用前景,然而其却没能像电磁导引和激光导引AGV 那样广泛使用,主要问题在于视觉导引技术在实时性、鲁棒性和测量精度方面还有待进一步突破。
由多个AGV 单元组成的AGV 系统(Automated Guided Vehicle System,AGVS)配有系统集成控制平台,对AGV 的作业过程进行监管和优化,例如,创建任务、地图生成、发出搬运指令、控制AGV 的运行路线、跟踪传送中的零件以与多AGV 的任务规划和调度。
将AGV 与外部自动化物流系统、生产管理系统有机结合,对系统内每台AGV 合理地分配当前任务、选择最佳路径、实时图形监控、管理运行安全,实现信息化的管理和生产,方便地构成由调配中心计算机控制的自动化生产线、自动仓库和全自动物流系统。
目前视觉导引方式主要方法有基于局部视觉和全局视觉两种方法。
基于视觉导引的AGV 还没有大规模产业化,但其潜在的市场前景使其成为近几年来国内外AGV 研究的热点。
全局视觉导引方法是将摄像机安装在天花板或者墙上,以整个工作环境为目标,对包括AGV、导引路径、障碍物等进行对象识别,对各个摄像机获取的图像进行基于特征的图像融合,得到全局地图。
在生成的全局地图中,每个AGV 单元,导引线,障碍物的绝对坐标都能够实时获取。
全局视觉方法相对于将摄像机安装在车体上的局部视觉方法,在多AGV 调度、障碍物检测(固定和移动)、避障、全局监测方面更具优势。
尤其是可以对AGV 和障碍物的特征进行分类,通过增强型的卡尔曼滤波方法进行运动估计,动态跟踪每一个目标的位置、速度。
但是这种方法要根据不同的现场环境,按照视野不被遮挡并覆盖整个工作空间的原则,根据摄像机放置算法决定摄像机的数目、安装位姿。
因此这张全局视觉方法仅仅适用于室内且空间较大的场合,而且导引精度较低。
自制3d全息投影的原理
自制3d全息投影的原理
全息投影是一种通过激光光源和光反射原理,将物体呈现为逼真的三维图像的技术。
下面将介绍自制3D全息投影的工作原理。
首先,需要准备以下材料和设备:一台激光投影仪,一个用来制作全息图像的3D建模软件,一个透明的玻璃或塑料平面,一台计算机和显示器。
1. 制作全息图像:使用3D建模软件,设计一个想要投影的三维模型图像。
确保图像具有足够的细节和逼真度。
然后,将图像导出为标准的全息图像文件格式,如.hologram或.holo。
2. 准备透明平面:采购透明的玻璃或塑料平面,确保它足够平整和透明,并且不会发生任何形变。
请注意平面的大小应适合投影。
3. 设置激光投影仪:将计算机连接到激光投影仪,并将其设置为扫描全息图像的源。
确保激光投影仪能够正确识别图像文件格式。
4. 显示全息图像:打开全息图像文件,并将其发送到激光投影仪。
激光投影仪将使用激光光源照射全息图像,然后通过透明平面将光投射到空中。
由于全息图像的光反射原理,人眼可以看到一个逼真的三维图像。
需要注意的是,自制3D全息投影的质量和效果可能不如专业
的设备。
在制作全息图像时,选择合适的软件和适当的模型设计非常重要。
另外,使用高质量的激光投影仪和透明平面,以及在适当的光线环境下观看可以改善投影效果。
总之,自制3D全息投影的原理是基于激光光源和光反射原理,利用3D建模软件制作全息图像,并通过透明平面将光投射到
空中形成逼真的三维图像。
车载智慧屏 倒车辅助系统设计方案
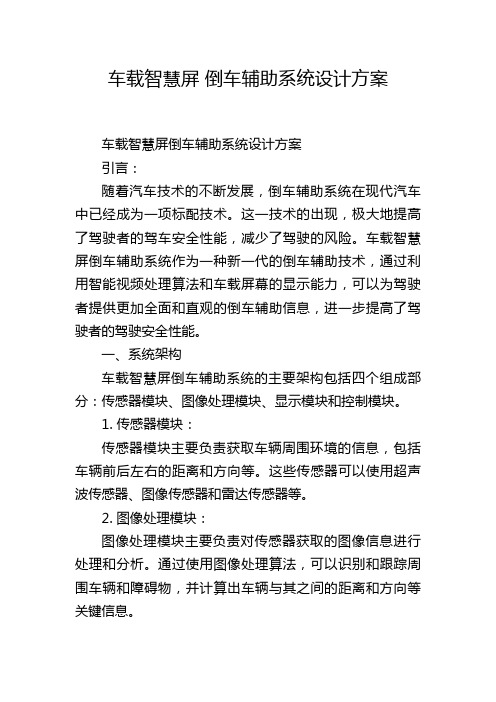
车载智慧屏倒车辅助系统设计方案车载智慧屏倒车辅助系统设计方案引言:随着汽车技术的不断发展,倒车辅助系统在现代汽车中已经成为一项标配技术。
这一技术的出现,极大地提高了驾驶者的驾车安全性能,减少了驾驶的风险。
车载智慧屏倒车辅助系统作为一种新一代的倒车辅助技术,通过利用智能视频处理算法和车载屏幕的显示能力,可以为驾驶者提供更加全面和直观的倒车辅助信息,进一步提高了驾驶者的驾驶安全性能。
一、系统架构车载智慧屏倒车辅助系统的主要架构包括四个组成部分:传感器模块、图像处理模块、显示模块和控制模块。
1. 传感器模块:传感器模块主要负责获取车辆周围环境的信息,包括车辆前后左右的距离和方向等。
这些传感器可以使用超声波传感器、图像传感器和雷达传感器等。
2. 图像处理模块:图像处理模块主要负责对传感器获取的图像信息进行处理和分析。
通过使用图像处理算法,可以识别和跟踪周围车辆和障碍物,并计算出车辆与其之间的距离和方向等关键信息。
3. 显示模块:显示模块主要负责将图像处理模块计算出的倒车辅助信息显示在车载智慧屏上,包括车辆周围环境图像、距离提示信息和方向指示等。
4. 控制模块:控制模块主要负责接收驾驶者的指令,控制传感器模块和图像处理模块的工作。
例如,当驾驶者选择倒车辅助功能时,控制模块会自动开启传感器模块和图像处理模块,并将结果传递给显示模块进行显示。
二、系统功能车载智慧屏倒车辅助系统的主要功能包括:1. 倒车辅助图像显示:在倒车时,车载智慧屏会自动显示车辆周围环境的图像,包括前后左右的景象,以帮助驾驶者更好地了解周围情况。
2. 距离提示信息显示:根据传感器模块获取的车辆与障碍物之间的距离信息,车载智慧屏会在图像上显示相应的距离提示信息,例如“前方10米”、“后方5米”等,以帮助驾驶者判断与障碍物的距离。
3. 方向指示显示:根据车辆行驶的方向和传感器模块获取的车辆与障碍物之间的方向信息,车载智慧屏会在图像上显示相应的方向指示箭头,以帮助驾驶者正确控制车辆的方向。
大货车转弯盲区预警系统设计
车辆工程技术34 车辆技术0 引言 随着交通运输业的快速发展,大货车的使用率越来越高,但是与之相应的交通事故也随之提升,每年造成严重的经济损失和人员伤亡,引发国内外的广泛关注,究其根源在于汽车在行驶的过程中存在一些驾驶员视觉看不到的地方,其视线被车体遮挡而不能直接观察到的那部分区域,我们将其称之为汽车盲区[1],货车也是存在这一些区域,当货车在行驶时驾驶员是无法看到汽车后方的全部视野,还有货车在右转弯时由于右侧盲区和内轮差的存在,使得驾驶员的视野受到限制,以至于不能够通过后视镜准确的观察到货车右侧的环境情况,这样容易引发与其他车辆和人流经过的交通事故。
在近年,随着交通事故的频繁发生,为降低交通事故发生概率,汽车盲区预警装置的研究广受国内外的各大汽车厂商和汽车拥有者关注,由于我国是世界上人口最多的国家之一,经济发展速度较快,对于汽车的需求量较大,因此在汽车盲区方面的研究也有一定的成果,本项目的装置能够解决驾驶员因盲区所带来的困惑,减少因交通事故而带来的各种损失和安全隐患。
该装置的作用在于让驾驶员能清晰的看到盲区的情况和环境,当盲区有出现突发情况时会发出警报提醒驾驶员。
1 交通事故的分析 大型车辆发生的交通事故较为复杂,具体有各方面的原因,有人为原因、环境因素、车辆本身的构造。
人为因素是指驾驶员造成的事故。
对于一些驾驶员本身而言完成运输任务就行,所以他们往往以追求经济利益为主有时忽略了安全问题,例如对汽车盲区问题的不了解,缺少相应的防范和安全知识。
还有疲劳驾驶和酒后驾驶等。
环境因素的影响也是很大的。
在行驶时遇到暴雨、雾霾等天气,在转弯、倒车、行驶上严重影响了司机的视野,司机从后视镜不能清晰的看到盲区的状况,容易引发交通事故。
车辆构造因素问题在于货车本身,货车在设计和制造上与小型车辆有较大的区别,它存在较大面积的盲区以及内轮差,导致在行驶时司机要留意和分散的注意力增加,而在货车后视镜的设计上,又不能观看到全部的盲区范围,存在严重的安全隐患。
车辆地面投影预测算法
车辆地面投影预测算法1.引言1.1 概述车辆地面投影预测算法是一种用于预测车辆在地面上可能产生的投影的算法。
在现代交通系统中,准确预测车辆在地面上的投影对于提高交通安全和交通效率至关重要。
通过预测车辆在地面上的投影,交通管理人员可以更好地规划道路和交叉口,并采取相应的措施来减少交通事故的发生和道路拥堵的程度。
车辆地面投影预测算法的关键在于利用车辆行驶的相关信息,如车辆速度、方向、加速度等,结合道路地势、交通信号灯,以及周围车辆和行人的动态信息,来预测车辆在未来一段时间内在地面上的投影位置。
这些信息可以通过传感器和通信技术获取,如车载传感器、交通监控摄像头、车辆通信网络等。
车辆地面投影预测算法的实现需要使用机器学习和数据分析的方法。
通过对历史数据和实时数据的分析和学习,算法可以逐渐提高预测的准确性。
同时,由于道路交通的复杂性和不确定性,车辆地面投影预测算法也需要考虑不同的交通场景和不同车辆行为模式,以保证预测的有效性和实用性。
本文将重点讨论车辆地面投影预测算法的关键要点和技术挑战。
首先,我们将介绍车辆地面投影预测算法的基本原理和流程。
然后,我们将深入探讨算法所需的关键数据和特征提取方法。
接着,我们将提出一种基于机器学习的预测模型,以及训练和验证算法的方法。
最后,我们将讨论算法的应用前景和可能的改进方向。
通过研究和应用车辆地面投影预测算法,我们有望在交通管理领域取得重要的突破,为实现智能、高效、安全的交通系统做出贡献。
然而,由于车辆行驶环境的复杂性和数据的噪声干扰,车辆地面投影预测算法仍然存在很多挑战和待解决的问题。
因此,今后的研究需要进一步发展和改进算法,以提高预测的准确性和鲁棒性,为实现智慧城市的交通管理目标做出更大的贡献。
1.2文章结构文章结构部分的内容可以按照以下方式进行编写:在本文中,我们将讨论车辆地面投影预测算法,该算法用于预测车辆在地面上的投影位置。
本文结构如下:第一部分为引言部分,包括概述、文章结构和目的。
汽车盲区维修方案
汽车盲区维修方案随着汽车的快速发展,许多新型车辆都配备有后视摄像头或者侧偏转向辅助系统来避免盲区的出现。
但是,对于一些老旧车型或者其他一些车辆,存在着一定的盲区,这样会给驾驶员带来很大的安全隐患。
在这里,我们就会为大家介绍一些汽车盲区维修方案,以帮助驾驶员解决这个问题。
什么是汽车盲区?汽车盲区是指一些驾驶员和乘客无法通过正常的视野来看到的区域,这些区域还包括你的左后方、右后方、侧后方和中心后方。
盲区是由于车辆的结构和摆放位置造成的。
例如,驾驶员坐在座位上,车子的A柱就可阻挡你的视线, B柱也会造成视线死角,并且车子尾部也存在着盲区。
长时间处于汽车盲区中,驾驶员和乘客会被排放物、废气和其他危险物质所污染,也可能会发生交通事故。
解决方法:后视镜位置调整在车子的驾驶室后方贴上小型凸型镜,可以一定程度上弥补后视镜盲区。
同时在行车中,我们也可以对后视镜进行轻微调整,来弥补一些视觉上缺陷。
例如调整道右上方的后视镜可以提高侧方视野,调整到最佳的角度,我们可以看到车辆后方的许多物体和行驶的车辆。
安装盲区显示器现在市场上也可以买到一些盲区显示器来解决此问题。
盲区显示器是一个小型触摸屏,安装在车辆中控台上,可以显示在驾驶员上下左右盲区的监测画面,让驾驶员在倒车、变道等操作时,更加轻松地把握道路情况,减少事故的发生。
安装盲区监测系统除了安装盲区显示器外,驾驶员还可以考虑安装盲区监测系统。
这种系统通常都使用摄像机来对盲区进行监测,并且在盲区内监测到物体时会发出警告声音或驾驶员位于车辆后方的显示器上进行提示,大幅度的提高了驾驶员对盲区的警觉性,避免了许多交通事故的发生。
调整座位的高度和位置调整驾驶座位的高度和位置,可以给驾驶员更清晰的视野,减少视线的死角。
另外,驾驶员也可以为自己设置一个符合人体工程学的座椅,使得长时间驾驶过程中也不会出现疲劳驾驶和视觉疲劳。
安装安全带匆忙驾驶、不系安全带的情况经常发生在许多的交通事故中,而安全带是预防或减少事故伤害的最重要因素。
智能网联汽车技术基础最新版课件-项目八 先进驾驶辅助系统

2、改善视野类ADAS认知
先进驾驶辅助系统
汽车自适应前照明系统(Adaptive Front Lighting System,AFS)通过车速传感器、转向盘角度传感器 、车高传感器等感知车辆行驶状态信息,自动调节前照明系统的工作模式,可实现城市道路照明、高速公路公 路照明、转弯道路照明及阴雨天气照明等不同照明模式的调节,保障车辆不同条件下的照明效果。
1、先进驾驶辅助系统整体认知
先进驾驶辅助系统
(3)自主控制类ADAS
自主控制类ADAS是指自动监测车辆可能发生的危险并提醒,必要时系统会主动介入车,通过控制车辆的横 、纵向运动防止发生危险或减轻事故伤害的驾驶辅助系统,包括:车道保持辅助系统、自动紧急制动系统、自 适应巡航控制系统和换道辅助系统等。
3、预警类ADAS认知
先进驾驶辅助系统
二、典型系统案例
本节以车道偏离预警系统为例,介绍预警类ADAS的系统组成及工作原理。
1、先进驾驶辅助系统整体认知
先进驾驶辅助系统
图8-1-1 ADAS系统在车辆上的应用示意图
在ADAS中,通常融合多个传感器信息实时感知 周边环境,为车辆计算系统提供精准的路况数据、障 碍物和道路标线等相关信息。软件系统根据传感器的 输入实时构建汽车周围环境的空间模型或计算行驶的 危险级别。接着,将输出提供给驾驶人或指定系统应 如何预警或主动干预车辆控制。如图8-1-1所示,为 ADAS在汽车上的应用以及不同类型传感器在ADAS中 的应用范围。
智能网联汽车技术基础
项目八 先进驾驶辅助系统
任务一 先进驾驶辅助系统整体认知 任务二 改善视野类ADAS认知 任务三 预警类ADAS认知 任务四 自主控制类ADAS认知 任务五 其他类型ADAS认知
汽车视野盲区分析及解决方案

汽车视野盲区分析及解决方案王乾浩;孙文轩;陈莹;薛亚硕;杨楠【摘要】汽车在行驶过程中,特别是在汽车并道时,由于视野盲区的存在使驾驶员不能对车身周围的情况有清晰的了解,很容易造成交通事故.对汽车在道路上行驶时的视野盲区进行综合分析并给出适当的解决方案,对安全行车具有重大意义.【期刊名称】《林业机械与木工设备》【年(卷),期】2017(045)009【总页数】3页(P44-46)【关键词】视野盲区;侧向辅助系统;3D全息投影技术;解决方案【作者】王乾浩;孙文轩;陈莹;薛亚硕;杨楠【作者单位】东北林业大学交通学院,黑龙江哈尔滨 150040;东北林业大学交通学院,黑龙江哈尔滨 150040;东北林业大学交通学院,黑龙江哈尔滨 150040;东北林业大学交通学院,黑龙江哈尔滨 150040;东北林业大学交通学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】U491.25汽车盲区示意图如图1所示。
1.1 前盲区前盲区是指汽车引擎盖所遮挡的区域,这个视野盲区的大小主要与汽车前端盖类型、驾驶员身材、座椅高度、发动机的布置形式等有关。
汽车多数情况下为向前行驶,驾驶员可以在启动汽车前下车检查盲区情况,确定没有安全隐患之后再启动汽车。
另外,汽车行驶过程中驾驶员可以适当调整坐姿以适应不同的行驶条件,使视野盲区尽量缩小,驾驶员在行车过程中要合理分配注意力,以应对突发状况。
1.2 两侧盲区两侧盲区主要是指汽车两侧由于3个立柱(从前到后依次为A柱、B柱、C柱)的存在而造成的视野盲区。
A柱盲区是最危险也是最为常见的两侧视野盲区,汽车左右转向时,由于驾驶员的视线被这些立柱遮挡,会短时间内无法看清盲区内的障碍物或行人,如果驾驶员在转向时车速没有降到一定范围内,则很容易造成重大交通事故。
立柱盲区是车身构造引起的,目前从结构理论上还无法完全消除,但驾驶员在转向时只要降低车速,适当挪动身体来调整视线,就会在很大程度上消除立柱盲区带来的安全隐患。
大型车辆右转弯盲区预警系统设计
YANG Wei,ZHANGZhiwei,ZHOU Kaixia,LIUJiajun
(犛犮犺狅狅犾狅犳犃狌狋狅犿狅犫犻犾犲,犆犺犪狀犵’犪狀犝狀犻狏犲狉狊犻狋狔,犡犻’犪狀710064,犆犺犻狀犪)
犃犫狊狋狉犪犮狋:Tocompensatethepoornightworkingeffectandlowriskwarningaccuracyoftraditionalrightsideblindwarningsys tem,arightturningcollisionwarningsystemoflargevehicleswasdesignedforallweatherenvironment.Whenthesignalofright turnsignalwascollected,thesystemstartedtheRMONCAMC600highdefinitioninfraredvisionsensortoshoottheblindarea image.BlindimagesweredetectedforpedestrianandcyclistbyusingthetrainedInceptionv3migrationlearningmodel.Ifdan geroussituationwasdetected,thesystem wouldimmediatelydisplaytheblindareaandgiveanalarm.Theresultsshowthatthe averageaccuracyofthesystemis97% andtheneededaveragetimeis74.8msforthedetectionoftherightblindareaofeach frame.Thesystemcanaccuratelyidentifytherightblindareaintheabsenceofilluminationatnightandprovidetimelyandrelia blecollisionwarningofrightblindarea. 犓犲狔狑狅狉犱狊:automobileengineering;pedestriandetection;Inceptionv3model;deeplearning;highdefinitioninfraredvisionsensor
车辆盲区的解决方案

车辆盲区的解决方案车辆盲区是指在驾驶员视线内无法看到的区域。
这些盲区可能会导致事故和伤害。
为了解决这个问题,汽车制造商和技术公司开发了多种技术来识别并消除车辆盲区。
1. 倒车影像系统倒车影像系统是一种在汽车后方安装摄像机并与车辆显示器相连的技术。
该技术可以帮助驾驶员在倒车时更加清晰地看到车辆后方。
倒车影像系统可以有效地减少倒车事故,因为它可以告诉驾驶员什么时候停车。
2. 盲区监测系统盲区监测系统使用雷达和摄像机等技术来检测驾驶员无法看到的区域。
当有物体进入盲区时,系统会向驾驶员发出警告。
这使得驾驶员可以更加谨慎地驾驶车辆,确保安全。
3. 自动刹车系统自动刹车系统是一种可以在检测到险情时自动帮助车辆减速或制动的技术。
如果驾驶员没有及时地刹车,自动刹车系统会帮助车辆避免事故或减少事故严重程度。
自动刹车系统可以在桥梁和收费站等狭窄路段,以及行人和其他车辆突然出现的情况下非常有用。
4. 360度全景摄像系统360度全景摄像系统可以帮助驾驶员更好地了解周围的道路和交通情况。
该系统通过安装多个高清摄像机在车辆四周,将周围的情况呈现在驾驶员的显示器上。
这种技术可以减少盲区,并增加驾驶员对周围环境的了解。
5. 智能后视镜智能后视镜是一种可以替代传统后视镜的技术。
这种后视镜将安装在车辆内部,使用高清摄像头来捕捉车辆后方的图像。
该技术可以帮助驾驶员看到传统后视镜无法覆盖的区域。
它可以在夜间或低光照条件下更好地工作,并具有自适应亮度和曝光控制功能。
结语随着汽车技术的迅速发展,各种技术在帮助驾驶员减少车辆盲区方面发挥着越来越重要的作用。
这些技术不仅能够保护驾驶员和乘客的安全,还可以减少车辆事故和损失。
bev 视角转换原理
bev 视角转换原理
BEV (Bird's Eye View) 视角转换原理是一种将车辆周围的实时图像转换为鸟瞰视角的技术。
它通过使用车辆周围多个摄像头的图像,并将它们合成为一个全景图像,从而实现鸟瞰视角的效果。
BEV 视角转换原理主要包括以下几个步骤:
1. 图像采集:车辆周围安装多个摄像头,通常包括前、后、左、右和顶部摄像头,用于捕捉车辆周围的实时图像。
2. 图像校正:为了保证图像的准确性和一致性,每个摄像头的图像需要进行校正。
校正包括去除镜头畸变、调整图像的亮度、对比度和颜色平衡等操作。
3. 图像拼接:将多个摄像头的图像进行拼接,以形成一个全景图像。
拼接可以通过图像的重叠区域进行对齐和融合,从而获得连续、无缝的鸟瞰视角。
4. 透视变换:将全景图像进行透视变换,使得车辆周围的图像呈现出鸟瞰视角。
透视变换可以通过数学算法来实现,将图像中的每个像素点映射到新的位置,从而改变图像的视角。
5. 显示输出:将转换后的鸟瞰图像显示在车辆的显示屏上,供驾驶员观看。
鸟瞰图像可以帮助驾驶员更好地了解车辆周围的环境,提供更全面的视角,从而提高行驶安全性。
总的来说,BEV 视角转换原理通过图像采集、校正、拼接、透视变换和显示输出等步骤,将车辆周围的多个摄像头图像转换为鸟瞰视角,从而提供更全面、准确的车辆环境信息。
车载镜头光学设计流程

车载镜头光学设计流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!标题:车载镜头光学设计流程详解一、引言车载镜头作为高级驾驶辅助系统(ADAS)与自动驾驶系统的核心组件,其光学设计的精准度与性能直接影响到车辆环境感知的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种随驾驶员视线改变视角的车辆盲区投影系统,由车外摄像头、投影模块、投影幕、驾驶员视线追踪摄像头和微电脑模块组成,多个车外摄像头安装在车外的驾驶员视线盲区处,投影幕贴在车辆的引擎盖上,投影模块安装在车辆前挡风玻璃的上部,其投影端指向引擎盖上的投影幕;多个驾驶员视线追踪摄像头安装在车内前挡风玻璃的上部;车外摄像头和驾驶员视线追踪摄像头的信号输出端连接在微电脑模块的信号输入端,投影模块的信号输入端连接在微电脑模块的信号输出端;微电脑模块根据驾驶员的视线方向实时调整各车外摄像头的拍摄角度,使其与驾驶员的视线方向一致,并通过投影模块实时将组合后的影像投射到车辆引擎盖上的投影幕上。
权利要求书
1.一种随驾驶员视线改变视角的车辆盲区投影系统,由车外摄像头、投影模块、投影幕、驾驶员视线追踪摄像头和微电脑模块组成,其特征是:多个车外摄像头安装在车外的驾驶员视线盲区处,投影幕贴在车辆的引擎盖上,投影模块安装在车辆前挡风玻璃的上部,其投影端指向引擎盖上的投影幕;多个驾驶员视线追踪摄像头安装在车内前挡风玻璃的上部;车外摄像头和驾驶员视线追踪摄像头的信号输出端连接在微电脑模块的信号输入端,投影模块的信号输入端连接在微电脑模块的信号输出端;微电脑模块实时通过驾驶员视线追踪摄像头检测驾驶员的视线方向,并根据驾驶员的视线方向,调整各车外摄像头的拍摄角度,使其与驾驶
员的视线方向一致,同时将车外摄像头拍摄的影像组合后,通过投影模块实时投射到车辆引擎盖上的投影幕上。
技术说明书
随驾驶员视线改变视角的车辆盲区投影系统
技术领域
一种随驾驶员视线改变视角的车辆盲区投影系统。
背景技术
目前,没有能够按照驾驶员视线方向拍摄和显示车辆盲区影像的装置,现有车辆盲区显示装置通常采用固定视角拍摄和显示车辆盲区影像,所显示的影像也很容易存在盲区,不利于驾驶员更好地观察车辆多方向的盲区情况,不利于行车安全。
技术内容
为了克服现有车辆盲区显示装置的不足,本技术提供一种随驾驶员视线改变视角的车辆盲区投影系统。
该随驾驶员视线改变视角的车辆盲区投影系统可通过其驾驶员视线追踪摄像头检测驾驶员的视线方向,并根据驾驶员的视线方向,调整各车外摄像头的拍摄角度,使其与驾驶员的视线方向一致,同时将车外摄像头拍摄的影像组合后,通过投影模块实时投射到车辆引擎盖上的投影幕上。
本技术解决其技术问题所采用的技术方案是:该随驾驶员视线改变视角的车辆盲区投影系统由车外摄像头、投影模块、投影幕、驾驶员视线追踪摄像头和微电脑模块组成,多个车外摄
像头安装在车外的驾驶员视线盲区处,投影幕贴在车辆的引擎盖上,投影模块安装在车辆前挡风玻璃的上部,其投影端指向引擎盖上的投影幕;多个驾驶员视线追踪摄像头安装在车内前挡风玻璃的上部;车外摄像头和驾驶员视线追踪摄像头的信号输出端连接在微电脑模块的信号输入端,投影模块的信号输入端连接在微电脑模块的信号输出端;微电脑模块实时通过驾驶员视线追踪摄像头检测驾驶员的视线方向,并根据驾驶员的视线方向,调整各车外摄像头的拍摄角度,使其与驾驶员的视线方向一致,同时将车外摄像头拍摄的影像组合后,通过投影模块实时投射到车辆引擎盖上的投影幕上。
本技术的有益效果是,可根据驾驶员的视线方向实时调整各车外摄像头的拍摄角度,使其与驾驶员的视线方向一致,并通过投影模块实时将组合后的影像投射到车辆引擎盖上的投影幕上。
附图说明
下面结合附图对本技术进一步说明。
图1是本技术的组成结构和数据传输方式示意图。
图中(1)车外摄像头,(2)车外摄像头,(3)车外摄像头,(4)微电脑模块,(5)投影模块,(6)驾驶员视线追踪摄像头,(7)驾驶员视线追踪摄像头,(8)驾驶员视线追踪摄像头。
具体实施方式
该随驾驶员视线改变视角的车辆盲区投影系统由车外摄像头(1)(2)(3)、投影模块(5)、投影幕、驾驶员视线追踪摄像头(6)(7)(8)和微电脑模块(4)组成,多个车外摄像头安装在车外的驾驶员视线盲区处,投影幕贴在车辆的引擎盖上,投影模块安装在车辆前挡风玻璃的上部,其投影端指向引擎盖上的投影幕;多个驾驶员视线追踪摄像头安装在车内前挡风玻璃的上部;车外摄像头和驾驶员视线追踪摄像头的信号输出端连接在微电脑模块的信号输入端,投影模块的信号输入端连接在微电脑模块的信号输出端;微电脑模块实时通过驾驶员视线追踪摄像头检测驾驶员的视线方向,并根据驾驶员的视线方向,调整各车外
摄像头的拍摄角度,使其与驾驶员的视线方向一致,同时将车外摄像头拍摄的影像组合后,通过投影模块实时投射到车辆引擎盖上的投影幕上。
以上公开的仅为本申请的一个具体实施例,但本申请并非局限于此,任何本领域的技术人员能想到的变化,都应落入本申请的保护范围内。