气动人工肌肉的动态驱动特性研究
人工肌肉的科学原理与应用

人工肌肉的科学原理与应用在生物学中,肌肉是动物体内一种重要的组织,其作用是通过收缩和松弛实现机械能的转化,从而使机体产生运动。
基于这种有力的运动模式,人们希望能够制造一种机电装置,以实现类似于肌肉的功能,于是人工肌肉应运而生。
本文将介绍人工肌肉的科学原理和应用。
一、人工肌肉的科学原理人工肌肉的核心是人类模仿肌肉作用机理的产物,综合了电学、化学、物理学以及材料科学等交叉学科的成果。
在人工肌肉的原理中,电、化学反应和材料物理学是关键。
1. 电学原理通常情况下,人工肌肉是用来产生挤压或者拉伸的力。
人工肌肉能够向外施加力的根本在于其能够进行扭转和压缩,而这种扭转和压缩与电和热有关。
在电学方面,当电流通过了人工肌肉中的金属线或者合金丝时,由于金属六共面的电特性,金属丝会受到相应的加热,从而导致金属线或者合金丝发生伸长或者缩短的现象。
2. 化学原理当人工肌肉受到电流的刺激时,其中的一些化学成分也会发生变化。
例如,真空袋中的铜会在电刺激下被氧化,从而使袋子收缩,实现了人工肌肉的功能。
3. 材料物理学制造人工肌肉时,材料的选择至关重要。
例如,有些材料在收到电流刺激之后会发生明显的收缩,而其他材料则会扩张。
因此,要根据不同的应用场景选择不同的材料,以达到所需要的效果。
二、人工肌肉的应用人工肌肉在实际应用中有着广泛的用途,可以应用在肢体假肢、机器人、医疗和航空等多个领域。
1. 肢体假肢肢体假肢是人工肌肉的一大应用领域。
相比于普通的假肢,人工肌肉能够更好地模仿自然肌肉的运动方式,从而能够帮助残疾人恢复一定的运动能力。
在人工肌肉的框架中,通过合适的电刺激可以实现机械手臂的移动、手指的弯曲、手掌的抓握等动作。
2. 机器人另一个主要的应用领域是机器人。
在机器人的框架中,人工肌肉能够实现机器人运动的平滑与控制效果。
通过电极的应用,可以使人工肌肉更加智能化,实现更加复杂的动作和功能。
这样,机器人具备了更为灵活的执行能力,可以胜任更加复杂的任务。
气动人工肌肉驱动器的动态跟随控制研究
2 控 制 系统 软 件 设计
动与噪声控制方 面的研究和教学工作 。 曾在《 西安交通大学学报》 上
发表“ 气动人工肌 肉的动态驱动特性研究” 等论文 。
21 0 0年 3 月
刘吉轩等 : 气动人工肌肉驱动器 的动态跟 随控制研究
3 5
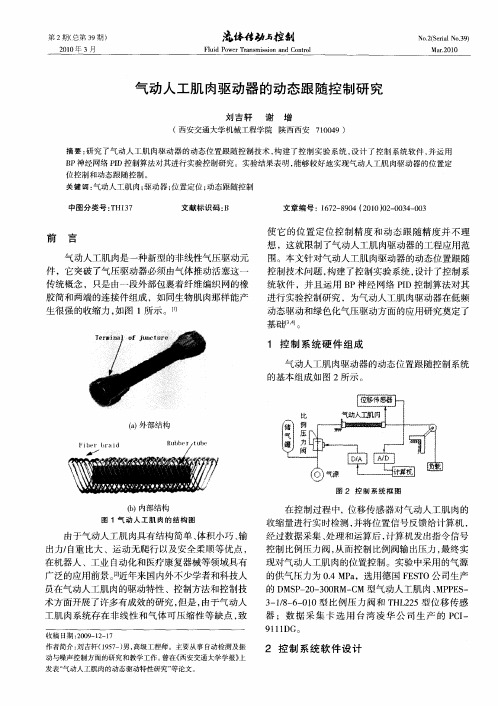
控 制 系统 的软 件设计 采用 虚拟 仪器 开发 平 台软 件 Lb IW 实现 。 Lb IW 软件 平 台能够 以其 直 aVE aVE 观简便 的编程 方式 、 多种 源码级 的设 备驱 动程 序 、 多 种多样 的分析 和表 达功能 支持 ,为用 户快 捷地 设计 实用 的测控 系统创造 了条 件 。气 动人 工肌 肉驱 动器 的动态 位置跟 随控制 系统 的软件 功 能框 图如 图 3 所
B P神 经 网络 PD算 法是 根据 系统 的运 行状 态 , I 适 时调节 PD控 制器 的参 数 k 、i k,使 输 出层 I pk 和 d 神经元 的输 出状 态对应 于 PD控制器 的三个 可调 参 I 数 , 利用 经典增 量式 数字 PD控制算 法 , 加 载系 再 I 对 统进 行控 制 和最 优化 。基 于 B P神 经 网络 的 PD控 I
人机界面l控制算法l数据处理 J l源自耋 圈 I ll 薹 Il 囊
图 3软 件 功 能框 图
图 6控 制 系统 前 面板
本系统 B P神 经 网络 的结构 如 图 7所示 :
Z
kp
输 入
隐
输 出堪
图 7 BP神 经 网络 的 结构 图
图 4 软件 流 程 图
收稿 日期 :0 9 1— 7 20 — 2 1 作者简介 : 刘吉轩 (9 7 ) , 15 一 男 高级工程师 。主要从事 自动检测及振
下肢外骨骼康复机器人动力学仿真与

2022年第46卷第12期Journal of Mechanical Transmission下肢外骨骼康复机器人动力学仿真与分析马晓君1刘玉阳1贾秋生2刘德胜3刘训报1袁铭润3(1佳木斯大学机械工程学院,黑龙江佳木斯154007)(2哈尔滨轴承集团公司,黑龙江哈尔滨150002)(3佳木斯大学信息电子技术学院,黑龙江佳木斯154007)摘要下肢外骨骼康复机器人可以有效提高下肢运动功能受损患者的康复效率,减轻康复医师的工作量。
设计了一款气动肌肉驱动的下肢外骨骼康复机器人。
为探究外骨骼机器人运动状态和各关节运动机理之间的关系,采用拉格朗日方程对下肢外骨骼进行动力学建模,将建立好的虚拟样机模型导入Adams中进行动力学仿真,得到下肢外骨骼康复机器人在不同运动状态下各关节在运动过程中转矩的变化情况,对仿真数据进行分析,验证了数据的正确性,为下一步实物样机制作及驱动器的选择提供了理论依据。
关键词外骨骼机器人拉格朗日方程动力学仿真虚拟样机Simulation and Analysis of Dynamics of Lower Limb Exoskeleton Rehabilitation Robots Ma Xiaojun1Liu Yuyang1Jia Qiusheng2Liu Desheng3Liu Xunbao1Yuan Mingrun3(1School of Mechanical Engineering,Jiamusi University,Jiamusi154007,China)(2Harbin Bearing Group Corporation,Harbin150002,China)(3School of Information and Electronic Technology,Jiamusi University,Jiamusi154007,China)Abstract A lower limb exoskeleton rehabilitation robot can effectively improve the rehabilitation efficien⁃cy of patients with impaired lower limb motor function and reduce the workload of rehabilitation physicians. Therefore,a lower limb exoskeleton rehabilitation robot is designed,the relationship between the motion state of the exoskeleton robot and the motion mechanism of each joint is explored,the Lagrange equation to model the dynamics of the lower limb exoskeleton is used and the established virtual prototype model into Adams for dy⁃namic simulation is imported.Further,the torque changes of each joint of the lower limb exoskeleton rehabilita⁃tion robot in different motion states are obtained.The data are analyzed to verify the correctness of the data, which provides a theoretical basis for the next step of the physical prototype fabrication and the selection of the actuator.Key words Exoskeleton robot Lagrangian equation Dynamics simulation Virtual prototype0引言现如今,由于脑卒中、车祸或其他原因引起身体运动功能受损的人口数量在不断增加,从事有关康复训练的专业人员严重不足,因此,开发一种能够代替康复医师工作的机器人成为当下一个研究热点[1]。
人工肌肉的分类

人工肌肉的分类
人工肌肉是一种仿生材料,可以模拟人类肌肉的功能和特性。
根据其材料和工作原理的不同,人工肌肉可以分为几个不同的分类。
第一类是电致动人工肌肉,它是利用电能来激活和控制的。
这种人工肌肉通常由柔性导电材料制成,如碳纳米管或导电聚合物。
当电流通过它们时,导电材料会收缩或膨胀,从而模拟真实肌肉的运动。
电致动人工肌肉具有响应速度快、力量大、可控性强的特点,因此在机器人和智能装置等领域有广泛的应用。
第二类是化学反应人工肌肉,它是通过化学反应来实现肌肉运动。
这种人工肌肉通常由柔性聚合物或液体晶体材料制成。
当外部刺激物如光、温度或化学物质作用于它们时,材料会发生化学反应,从而引起收缩或膨胀。
化学反应人工肌肉具有灵敏度高、反应速度快的特点,可广泛应用于微机器人和医疗领域。
第三类是气动人工肌肉,它是利用气体或液体的压力来驱动的。
这种人工肌肉通常由柔性气囊或膜片制成,当气体或液体通过它们时,会引起肌肉的收缩或膨胀。
气动人工肌肉具有响应速度快、力量大的特点,常用于机器人和航空航天等领域。
第四类是形状记忆人工肌肉,它是利用特殊的合金或聚合物材料来实现肌肉运动。
这种人工肌肉具有记忆形状的特性,当受到外界刺激时,材料可以自动回复到其原始形状。
形状记忆人工肌肉具有自
修复能力和长期稳定性,广泛应用于医疗领域。
以上是几种常见的人工肌肉分类,每一类都有其独特的特点和应用领域。
人工肌肉的发展将为机器人技术、生物医学工程和智能装置等领域带来更大的创新和进步。
未来,随着科学技术的不断发展,人工肌肉的应用前景将变得更加广阔。
人造肌肉的工作原理及其在仿生机器人中的应用

人造肌肉的工作原理及其在仿生机器人中的应用人造肌肉是一种模拟人类肌肉运动的装置,具有强大的收缩和伸展能力,可用于多个领域,尤其是在仿生机器人中。
本文将介绍人造肌肉的工作原理以及在仿生机器人领域中的应用。
一、人造肌肉的工作原理1. 弹性材料人造肌肉通常由弹性材料制成,如合成聚合物或金属合金。
这些材料具有高度可塑性,能够承受大范围的伸缩变形。
2. 激发机制人造肌肉的激发机制类似于人体肌肉。
通过外部刺激,如电流、气压或热能,可以引起人造肌肉的收缩或伸展。
3. 收缩和伸展人造肌肉的收缩和伸展是通过控制输入的激发信号来实现的。
激发信号的类型和强度决定了人造肌肉的运动方式和幅度。
二、人造肌肉在仿生机器人中的应用1. 动力学人造肌肉在仿生机器人中扮演着关键的角色。
通过在机器人的关节和肌肉系统中应用人造肌肉,可以实现更精确和流畅的运动。
机器人可以模仿人类肌肉的收缩和伸展,使得其运动更加自然。
2. 机械臂人造肌肉在机械臂中的应用是非常广泛的。
机械臂可以使用人造肌肉来完成精密的动作,比如抓取和搬运物体。
人造肌肉具有较高的柔韧性和力量,可以适应不同形状和重量的物体。
3. 步行机器人步行机器人是仿生机器人领域中的一个重要研究方向。
人造肌肉被广泛应用于步行机器人的腿部系统中,可以模拟人类的步态和运动方式。
通过调节人造肌肉的收缩和伸展,步行机器人可以实现平稳的行走和灵活的动作。
4. 医疗辅助人造肌肉还可以应用于医疗领域,用于辅助康复训练和肢体功能的恢复。
人造肌肉可以模拟人体肌肉的运动,并根据患者的需要进行调节。
通过与人体肌肉的交互作用,可以帮助患者恢复肌肉功能和日常活动能力。
5. 灵巧操作人造肌肉的特性使得其在灵巧操作中有广泛应用的潜力。
比如在手术机器人中,人造肌肉可以用于进行高精确度的手术操作,提高手术的成功率和准确性。
三、结论人造肌肉作为一种模拟人体肌肉运动的装置,具有广泛的应用前景。
其工作原理基于弹性材料和激发机制,通过控制输入信号实现收缩和伸展。
(完整版)基于气动人工肌肉驱动的多关节机械手指动_力学仿真毕业论文
南京工程学院毕业设计说明书(论文)系部:机械工程学院专业:机械电子工程题目:基于气动人工肌肉驱动的多关节机械手指动力学仿真指导者:闫华副教授评阅者:2015 年 5 月南京毕业设计说明书(论文)中文摘要由于气动人工肌肉比重小、结构紧凑,占用空间小等优点,本文提出一种曲柄滑块机构来驱动手指弯曲,让气动人工肌肉驱动滑块运动,首先设计气动肌肉手指关节结构,并用SolidWorks绘制手指的三维图,利用ADAMS和MATLAB 进行动力学联合仿真,在手指端设置一定的负载,输入手指三个关节的直线驱动,观察手指末端的角速度变化和三个驱动力的变化,最后根据气动肌肉的驱动原理进行了气动肌肉灵巧手关节运动的控制研究,利用比例压力阀对气动肌肉压力进行控制,使气动肌肉横向收缩带动滑动移动,从而实现对手指关节弯曲角度的控制。
关键词:仿人灵巧手;关节设计;气动肌肉;动力学仿真毕业设计说明书(论文)外文摘要Title Dynamic simulation of multi joint robotic fingers based on pneumatic muscle driven muscle AbstractBecause of the small proportion of pneumatic muscle, compact structure and small space occupancy, etc. In this paper, a slider crank mechanism drive the finger bending. The slider crank mechanism is driven by artificial muscles, Firstly, designing pneumatic muscle finger joint structure, And with the SolidWorks drawing fingers entity graph, using ADAMS and MATLAB co-simulation of the dynamics, the fingertip set certain load, input linear drive of the three joints of the fingers, to observe the change of the angular velocity of the finger tip and three driving force of change, finally according to the driving principle of the pneumatic muscle was analyzed by gas dynamic muscle dexterous hand joint movement control research, using the proportional pressure valve of pneumatic muscle pressure control, pneumatic muscle transverse shrinkage to drive the sliding movement, in order to realize the control of the flexion angles of finger joints. Keywords: Dexterous hand; Structural design; Pneumatic muscles; Dynamic simulation目录前言 (1)第一章绪论 (2)1.1课题项目的背景 (2)1.2气动人工肌肉多关节手指的国内外发展现状 (2)1.3气动技术的介绍以及发展前景 (4)1.4论文研究的内容和方法 (6)第二章多关节手指的结构设计及建模 (7)2.1 气动肌肉的介绍 (7)2.1.1 气动肌肉的内部结构 (7)2.2 气动机械手指的基本结构 (8)2.2.1 绘图软件SoildWorks介绍 (8)2.2.2 整体设计方案的设计 (8)2.2.3 手指的关节设计 (9)2.2.4手指关节的建模 (11)2.3 灵巧手指的装配和三维模型的导出 (11)第三章多关节手指的动力学仿真分析 (12)3.1仿真软件ADAMS和MATLAB简介 (12)3.2 动力学仿真过程介绍 (13)3.2.1 ADAMS参数设置过程 (13)3.2.2 建立MATLAB控制模型 (16)3.3 动力学仿真结果分析以及结论 (17)第四章气动肌肉灵巧手指的控制系统设计 (18)4.1气动肌肉回路原理和设计 (18)4.1.1气动回路器件的选择 (19)4.2灵巧手指的关节控制系统 (20)4.2.1控制系统的原理 (20)4.2.2控制系统的硬件选择 (21)4.3 D/A控制界面的设计和程序的编写 (22)|第五章结论及总结 (25)参考文献 (26)致谢 (27)前言随着机器人技术的日益成熟,工业机器人极有可能最终取代机床,成为新一代工业生产的基础。
基于气动人工肌肉变刚度并联减振系统模型及特性研究

其在 锻 压 设 备 中 的 应 用 [ J ] . 机 床与液压 , 2 0 1 0 , 3 8 ,
( 河南科技大学 机 电工程学院 , 河南 洛阳
4 7 1 0 0 3 )
r;
摘
要: 为 了解决船舰 等 工程领 域 高精 仪 器的减振 问题 , 提 出了具有 弹性 阻尼和 变 刚度特 性 的并联 减振
系统 , 实现 了减振 系统 刚度 的有效调 节和控 制 。通过 系统运 动 学和 动 力 学分析 , 结 合 气动肌 肉数 学模 型 , 建 立 了并联减振 系统的数 学模 型 ; 利用 A d a m s 软 件 进行 仿 真 , 分析 了脉 冲激励 下刚 度等 系统特 性 参数 对 并 联
Po we r Sy s t e m S o c i e t y, 2 00 2, 1 07 — 1 1 .
பைடு நூலகம்
颜 昌文 , 王炜 , 谈宏华 . 电液 比例控制技 术在工程 船舶 中 的应用 [ J ] . 液压与气 动 , 2 0 0 8 , ( 8 ) : 4 8— 5 1 .
蒙争争. 电液 比例 控 制 技 术 在 快 速 深 拉 伸 液 压 机 中的 应
一
中图分类号 : T H 1 3 8 文献 标志码 : B 文章 编号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 1 1 - 0 0 5 2 - 0 5
引 言
运 动机构 由若 干个并 行 的运 动铰链 控制 称为并 联 机 构 。即 由多个 运 动链 的一端 同时与 一个具 有多个 自 由度 的终 端 操 作 器 连 接 构 成 … 。将 并 联 机 构 引 人 减
气动人工肌肉制作及应用
液 压 气 动 与 密 封 / 0 7年 第 3期 2o
气 动 人 工 肌 肉制作 及 应 用
杨 林 韩建海 赵 书 尚 肖亮子
( 河南科技大学机电工程学院, 河南洛阳 4 10 ) 70 3
摘 要: 气动人工肌 肉作为一种新型 的气动执行元件 , 在服务 型机器人中得到 了越来越多 的应用 。本文对气 动人工肌 肉所需
c t g mae as rc si g a i tr l ,p o e sn ,wo k n rn il n h rc e s i ft e p e ma i a t ca s l ed s r e n d t i i hsa — n i r i g p cpe a d c a a tr t so n u t ri i mu ce a e c i d i e al n t i r i i c h c i f l s r b t l .F n l ,t e a p i t n e a l ft e m ̄h nc e ie a ta e y f b c t n u t t ca s l x li e h i e i al c y h p l a i x mpe o h c o a ia d v c u td b a r e p e mai a i i mu e i e pan d i t e l c i d a cr f l i cs s n
气动人工 肌 肉是一种 新型 的拉伸 型气动执行 元
崭新的设计构思突破了气动执行元件作功必须 由压缩
空气推动活塞这 一传统概念。与传 统的气 缸相 比, 省
略 了活塞 、 活塞 杆 、 筒 、 缸 密封 圈等 诸 多零 部 件 , 主要 由
件, 当通人压缩空气时, 能像人类 的肌肉那样产生很强 的 收 缩力 , 以称 作 气 动人 工 肌 肉 。 动人 工 肌 肉 以 所 气
人工肌肉的研制与应用

人工肌肉的研制与应用人工肌肉是一种模仿人类肌肉的智能机械,具有多种应用领域。
随着现代科技的不断进步,人工肌肉的研制和应用也取得了显著的进展,成为了具有重要战略意义的前沿科技领域之一。
一、人工肌肉的研制人工肌肉的研制就是将一些类似于肌肉构造的材料或装置与电动力学相结合,通过一些机加工或管理控制方法来完成的。
根据材料不同,人工肌肉可分为压电人工肌肉、智能合金人工肌肉、液压人工肌肉、活性聚合物人工肌肉等。
1.1 压电人工肌肉压电材料具有压电效应,能够将机械能转化成电能,也可以将电能转化成机械能。
压电人工肌肉就是利用了良好的压电效应,将安装在不同的压电材料的两个表面上的金属电极进行交替触点的切换,实现了人工肌肉的弯曲和伸展,从而达到了肌肉的工作。
如压电材料Pb(ZrTi)O3(是一种铅氧钛压电陶瓷)的晶体方位变化会产生电荷分布的改变。
如果将两个引脚接到压电材料的两个表面上,并施加电压,它就能够在某个方向产生振荡运动。
有时,绕在某种电介质环绕的螺线管中还有一个这样的压电材料,螺线管就可以成为一块人工肌肉:当通高频信号时,螺线管会做变形收缩。
1.2 智能合金人工肌肉智能合金(Memory Alloy)是指具有记忆功能的合金。
温度敏感的智能合金受到控制电压的调节,能够发生形状记忆效应。
与传统的材料不同,智能合金能够在受到温度等外界环境的作用下,自我调节成为预定的形状,同时能够保持其弹性回程性质。
利用这一性质所制造的人工肌肉具有很好的可塑性和弹性。
1.3 液压人工肌肉液压人工肌肉是由一系列液体管道和小型活塞组成,利用液体在管内的压力差异来推动小型活塞的运动,从而实现了刚性运动。
液压人工肌肉性能稳定、动作幅度大、速度快、响应迅速,同时体积可调,可以降低成本。
1.4 活性聚合物人工肌肉活性聚合物人工肌肉具有一些与肌肉相似的特性如可伸缩、可弯曲、可扭曲等。
它的作用原理是,通过对其外部施加压力或电场等方式实现人工肌肉的伸缩变形,利用活性聚合物分子具有快速反应的特点,快速响应外界电场或压力的变化。
McKibben气动人工肌肉的理想模型
高 吸收能 力 的橡胶 套 筒 内部 及 表 面 , 与橡 胶 筒 硫 化 并
在一 起 。其编 织 网是 由刚度 很大 的纤 维组 成 。剖 面图
见 图 2 。
橡 胶筒
,
l 充气收缩
D
‘
弋0
・
.
I/ 、—
图 3 纤 维 层 几 何 参 数 关 系 示 意 图
,
/
橡 胶 筒 纤 维 a )气动 人工肌 肉层次 图 b )气动人工肌 肉断面图
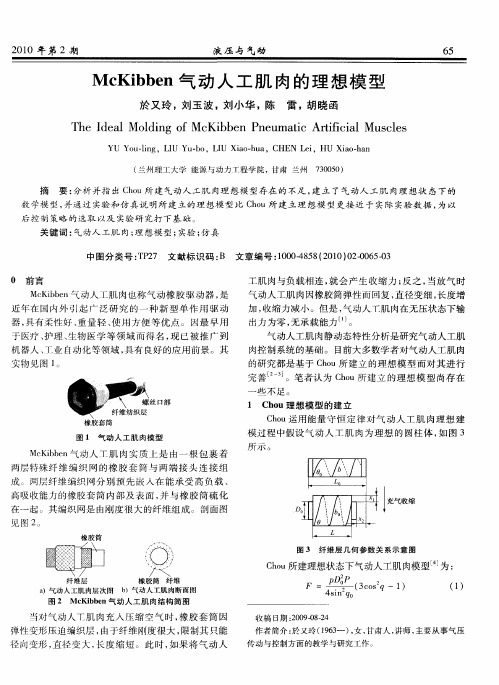
C o 建理 想状 态 下气 动人工 肌 肉模 型 为 : hu所
F:
4s n q i o
( csg_1 3 o2 )
() 1
一
1 Ch u理 想模 型 的建立 o
Co h u运用 能量 守 恒 定 律 对 气 动 人 工 肌 肉理 想 建
图 1 气 动 人 工 肌 肉模 型
模 过 程 中假设 气 动 人 工 肌 肉为 理 想 的 圆柱 体 , 图 3 如
所示 。
Mc ib n气 动人 T肌 肉实 质 上 是 由一 根 包 裹 着 Kb e 两层 特殊 纤 维 编 织 网 的橡 胶 套 筒 与 两 端 接 头 连 接 组
图 5 气 动 人 工 肌 肉 端 面 几 何 不 恿 图
Mc ibn气 动 人工肌 肉也称 气 动橡 胶 驱 动 器 , Kb e 是 近年 在 国 内外 引 起 广 泛 研 究 的 一种 新 型 单 作 用 驱 动
器 , 有柔 性好 、 量 轻 、 用 方便 等优 点 。因 最早 用 具 重 使
于 医疗 、 理 、 物 医学 等 领 域 而 得 名 , 已被 推 广 到 护 生 现
【doc】气动人工肌肉系统建模与仿真

气动人工肌肉系统建模与仿真第39卷第7期2003年7月,.《二机械工程v.1.39No.7 CHINESEJOURNALoFMECHANICALENGINEERINGJu1.2003气动人工肌肉系统建模与仿真李宝仁刘军杨钢(华中科技大学FESTO气动技术中心武汉430074)摘要:建立了气动人工肌肉系统完整的静动态特性数学模型,提出气动人工肌肉系统的工作过程可以分为等容充气,充气收缩,排气伸长和等容排气四个部分.并通过仿真分析了气动人工肌肉系统的工作特性,为控制策略的选取以及试验研究打下基础.关键词:气动技术人工肌肉静动态特性数学模型仿真中图分类号:TP270前言气动人工肌肉作为一种新型的气动执行元件,主要由内部橡胶筒及外部纤维层构成.充气后,气动人工肌肉可以实现径向膨胀和轴向收缩.在收缩运动过程中,其拉伸力逐步减小,使得气动人工肌肉最终能够平稳地达到期望位置.由于气动人工肌肉结构和工作原理的特殊性,其具有常规气动执行元件难以比拟的优点,如输出力一自重比大,柔性好,动作平滑,噪声低,重量轻和维护方便等,因此,气动人工肌肉在加工制造业,电子装备,半实物仿真和医疗器械等领域具有广阔应用前景.气动人工肌肉静动态特性分析是研究气动人工肌肉控制系统的基础,许多学者在此方面进行了研究[1~10】,建立了描述气动人工肌肉静动态性能的数学模型,但这些模型忽视了气动人工肌肉是一种气动元件的事实,没有考虑压缩空气的流动以及流动中的热力学过程对系统的影响,缺乏严格的理论基础,并不能准确的反映气动人工肌肉的实际运动情况.提出将气动人工肌肉系统作为一种气压传动系统来研究的观点,并基于流体力学和热力学理论建立了描述气动人工肌肉系统动静态特性的数学模型,同时应用此模型对气动人工肌肉系统进行仿真研究,得出了一些有益结论,为进一步分析研究气动人工肌肉控制系统打下了基础.1气动人工肌肉的结构特性气动人工肌肉的工作特性与其独特的结构特点是密不可分的.在气动人工肌肉的工作过程中,其20020925收到初稿.20030120收到修改稿纤维层起到了至关重要作用.当气动人工肌肉充气后(图1和图2),橡胶筒开始膨胀,由于纤维层对橡胶筒运动的约束,橡胶筒的径向膨胀力被转换为气动人工肌肉的轴向收缩力,从而使气动人工肌肉产生径向膨胀运动和轴向收缩运动,这就是气动人工肌肉充气后收缩运动的原因.图1气动人工肌肉结构简图图2纤维层几何参数关系示意图由于纤维层的刚性远远大于橡胶筒的刚性,因此,可以认为单根纤维的长度.Z在气动人工肌肉运动过程中保持恒定.根据图2,可得纤维层中的各几何参数的函数关系为L=lcos0(1)nlgD=lsinO(2)式中三——气动人工肌肉实际长度24机械工程?第39卷第7期D——气动人工肌肉的直径卜一单根纤维长度,l——纤维缠绕圈数——纤维与轴向之间的夹角2系统组成及其数学描述气动人工肌肉系统是一种气压传动系统.如图3所示,其主要由气动人工肌肉,小车,负载气缸和气源等部分组成.这里采用负载小车模拟惯性负气≮—一载,负载气缸模拟力负载.为方便推导出描述气动人工肌肉系统动静态特性的数学模型,特作如下假设.(1)在工作过程中,气动人工肌肉腔室内的气体与外界无热交换.(2)气源压力恒定,气体温度为环境温度.(3)气动人工肌肉腔室内的气体热力学过程为准静态过程.(4)气动人工肌肉无泄漏.图3气动人工肌肉系统1.减压阀2.压力表3.负载小车4.负载气缸5.气动人工肌肉6.换向阀7,储气蕾2.1充放气能量方程如图4所示,气动人工肌肉腔室的充,放气过程为一变质量系统的热力学过程.图4气动人工肌肉充放气简化物理模型根据有限容积绝热充气的能量守恒方程【ll1,可得气动人工肌肉充气过程的能量守恒方程为一kRT,q幼dV一='__________.一(1f(1f式中P——腔室内压力R——气体常数七——气体绝热指数——气源温度g~进入腔室的气体质量流量腔室工作容积将式(1)和(2)代入式(3),可得=(R一p)一==—--———--——?——---———-—-————---一I,r,一,l一一l(1f 一)一缸,l'I|缸,l(1fJ式中——橡胶筒体积同样,根据有限容积绝热放气的能量守恒方程可得气动人工肌肉放气过程的能量守恒方程为史:~k.Rrg.1望r5,一=~——__一l,l(1f(1f式中卜腔室内气体的温度qml——腔室排向大气的气体质量流量将式(1)和(2)代入式(5),可得一cRTq~l+p171112)一=一?____-?-_____-_____________-?.一IⅣ一一I(1f(f一)一缸'缸,ldfJ (6)2.2充放气流量方程气体进入腔室的质量流量方程【ll1为gm∞(cr,6I)=国(,61)=旦≤6lptlr:卫>6-式中广一充气上游压力.——进,排气管道系统的总有效面积6l——临界压力比腔室向大气排气的质量流量方程为【ll12003年7月李宝仁等:气动人工肌肉系统建模与仿真‰=I?=詈≤cr'.1:詈式中——橡胶筒的横截面积(9)卜表面有编织纤维层的橡胶筒的弹性模量假设橡胶筒套的体积在气动人工肌肉运动(1O)式中p0_一大气压力考虑到排气过程中腔室内气体温度的不断变化,假设排气过程为绝热等熵过程,写出温度随压力P的变化关系式【ll】为k-IT=(卫)T(11)2.3动力学方程如图5所示,以气动人工肌肉和小车为研究对象.FFlF2Fs图5气动人工肌肉系统受力模型示意图由牛顿第二运动定律可以获得气动人工肌肉系统的动力学方程为哇+.d2L=F3+F2+F~sign—F02)式中m.——气动人工肌肉质量m:——惯性负载质量F1——摩擦力F2——橡胶筒的弹性力F3——力负载F__气动人工肌肉收缩力si——摩擦力算子,sign=+_l摩擦力Fl为'=Fc+,7詈(13)式中Fc——运动过程中的库仑摩擦力r/——运动过程中的阻尼橡胶筒的弹性力F2为【】:~ELo-L.'厶过程中保持不变:(15),根据在气动人工肌肉任一微小区段内,定压气体对气动人工肌肉做功与气动人工肌肉输出力对外做功相等,可以得到气动人工肌肉的收缩力F为一FdL=(p—Po)dV(16)将式(1)和(2)代入式(16)可得F:(.)(17)2.4系统模型联立上述各方程,获得描述气动人工肌肉系统特性数学模型的微分方程组形式.充气收缩过程三式中J,o==詈(18)c?m?c2,oatn2k=排气伸长过程=Yl(?9)【=一G(Rrql+C3ylY2)式(18)和式(19)即为描述气动人工肌肉系统特性的数学模型.3仿真研究针对图3所构成的气动人工肌肉系统,采用变步长四阶龙格库塔法求解微分方程组,分析研究气动人工肌肉系统的工作特性.为了达到研究目的, (14)的外负载进行仿真.仿真参数如表机械工程第39卷第7期表1仿真计算用参数表2三组外负载由于气动人工肌肉系统具有下述两个特点. (1)气动人工肌肉开始运动之前存在一个充气启动过程,在此过程中,静摩擦力大小是随着腔室内压力不断升高而变化的.(2)气动人工肌肉的长度工不会超过它的初始长度,即气动人工肌肉在初始位置只能收缩,不能伸长.因此,在对气动人工肌肉系统进行仿真时,提出将其整个运动过程划分为等容充气,充气收缩, 排气伸长和等容排气四个过程来考虑.3.1等容充气图6中1,2,3各代表一种外负载情况下的工作曲线,以下皆同.图6所示,在等容充气过程中,气动人工肌肉腔内体积不变,腔内压力P随时间增加而线性上升.等容充气过程的时间即为气动人工肌肉的启动响应时间.图中曲线1,2,3表明:力负载越大,启动响应时间越长,惯性负载的大小与启动响应时间无关.3.2充气收缩充气收缩过程是气动人工肌肉的主要工作过程.图7,8,9所示,在充气收缩过程中,人工肌肉腔内体积不断增加,导致气动人工肌肉腔内压力P在逐渐升高的过程中出现波动.图中曲线1,2,3表明,气动人工肌肉的最终平衡位置由力负载决定,与惯性负载无关,当惯性负载较大时,在气动工肌肉运动的初始阶段会产生"抖动"现象,并伴随有腔内压力略大于气源压力的现象发生.坦F翻=\坦锚时问t/ms时问t/ms图6等容充气过程腔内压力p随时间t的变化曲线1?1.1?量.1?1.时问t/s图7充气收缩过程长度£随时间it的变化曲线时问t/s图8充气收缩过程速度1,随时间t的变化曲线4OI8000O0l一一一^【-E.目v煞硝葺;警2003年7月李宝仁等:气动人工肌肉系统建模与仿真27 苫\幽r时网t/0图9充气收缩过程腔内压力P随时间t的变化曲线3.3排气伸长排气伸长过程是气动人工肌肉由工作状态转换为非工作状态的过程.如图10,11,12所示,在排气伸长过程中,气动人工肌肉逐渐伸长,腔内体积不断减小,导致腔内压力P在不断下降的过程中出现波动.由于气动人工肌肉在初始位置不能伸长,因此气动人工肌肉在排气伸长运动结束时会产生"冲击",在短时间内气动人工肌肉停止运动.图中曲线1,2,3表明,力负载对排气伸长时间产生较大影响,力负载越大,排气伸长时间越短.昌图10排气伸长过程长度三随时间t的变化曲线I∞●昌,瞄j晕=时问t/s图11排气伸长过程速度v随时间t的变化曲线0.300.26o.zz幽0.18时同I/0图12排气伸长过程腔内压力P随时间t的变化曲线3.4等容排气图13所示,当气动人工肌肉收缩运动到初始位置后,腔室内压力仍然高于大气压力,此时,腔室向大气等容排气.图中曲线1,2,3表明,等容排气时间由等容排气过程开始时的腔内压力P决定,与外负载无关.\幽r趟时向t/8图13等容排气过程腔内压力p随时间t的变化曲线4结论将气动人工肌肉系统作为一种气压传动系统来研究,利用流体力学和工程热力学等理论详细地推导出了描述气动人工肌肉系统动静态特性的数学模型,提出气动人工肌肉系统运动由等容充气过程,充气收缩过程,排气伸长过程和等容排气过程组成,并通过仿真分析了气动人工肌肉系统的工作特性,这为进一步研究气动人工肌肉系统打下了基础.当然,由于机理建模中的一些因素,如摩擦力大小并未确定,橡胶的应力应变关系实际上并不满足虎克定理,而且,充放气过程中的绝热等熵假设在实际情况中并不存在,因此,所建立的描述气动人工肌肉系统动静态特性的数学模型还存在一些误差,这还应通过以后试验来验证.9753l1m玑m仉28机械工程第39卷第7期参考文献lChouCP.HannafordB.Staticanddynamiccharacteristicsof McKibbenpneumaticartificialmuscles.In:Proc.1994IEEE RoboticandAutomationConference,19942ChouCHannafordB.Measurementandmodelingof McKJbbenpneumaticartificialmuscles.IEEETransactions OnRobotics&Automation,1996,l2(1):90~1023TsagarakisN,CaldwenDG.Improvedmodelingandas- scssmentofpneumaticmuscleactuators.In:Proceedingsof the2000IEEEInternationalConferenceonRobotics& Automation,SanFrancisco,California:2oo04VincentAS,TonduMB.Nonlinearparametricidentifica- tionofaMcKibbenartificialpneumaticmuscleusingfiat- hesspropertyofsystem.In:Proceedingsofthe1998IEEE InternationalConferenceonControlApplicationsTrieste, Italy:19985DarwinG,Caldwell,GustavoA.Medrano-Cerda,eta1. Characteristicsandadaptivecontrolofpneumaticmuscle actuatorsforaroboticelbow.In:Proceedings,1994IEEE InternationalConferenceonRobotics&Automation,San Diego,California,USA.1994:3558~35636宇野元雄.厶人工筋口求一0应用.油压空气压,1986,l7(3):l75~1797则次俊郎,和田力.,厶制空气压7,_手,一夕0制御性能.油压空气压,1994,21(6):628~6348田杜平,林良明.人工肌肉静态特性及其测量.实用测试技术.1998(6):27~289刘荣,宗光华.人工肌肉驱动特性研究.高技术通讯, 1998(6):34~38lO叶骞,王祖温,包钢.气动人工肌肉.液压气动与密封2000(2):13~15l1李建藩.气压传动系统动力学.华南理工大学出版社,l991l2单祖辉.材料力学,上册.北京:国防工业出版社,1986 MoDELGANDS硼J】【.A TIoN oFPNEIATICMUSCLESYSTEMLiBaorenLiuJunGang (HuazhongUniversityofScienceandTechnology)Abstract:Pneumaticmuscleisanovelpnonmatic锄ct山Il. enmposedofarubbertubesurroundedbybraidedcords.111e fIlllmathematicmodelofpneumaticmusclesystemispresented.11leworkln~processofpneumaticmusclesystemisdivided intofoursuccessivepl∞ss骼,consistingofisometricinflation, contractiveinflation,extendeddisinflationandisometricdisin- fiation.111echaracteristicsofpneumaticmusclesystemarc discussedbycomputersimulation.Keywords:PneumatictechnologyPneumaticmuscle Dylaamicandstaticcharacteristics MathematicmodelSimulation作者简介:李宝仁,男,1962年出生,工学博士,教授,博士生导师.主要研究方向为新型液压,气动元件的开发,电液,电气伺服技术,负压伺服系统的基础理论.。
人工肌肉的研究和应用

人工肌肉的研究和应用一、引言人工肌肉这个概念,通常会被大家想象成一些奇特的机器人手臂或腿部,但其实除了这些传统的想法,人工肌肉还有着广泛的应用场景。
随着科技的不断发展,人工肌肉正逐渐演化为一种新型材料,拥有越来越多的实用性和市场价值。
本文将阐述人工肌肉的相关研究和具体应用,旨在提供对其发展和前景的了解和认识。
二、人工肌肉的定义和基本原理首先我们要明确,人工肌肉是一种由活性聚合物、电致活性材料或其他可能形成收缩延伸运动的元件构成的新型材料。
在这些材料中,电致活性材料尤其是电致致动聚合物材料是最常见的。
这类材料在感受到电压或电场时会发生体积变化,产生与真正的肌肉相似的运动,因此被称作“人工肌肉”。
其基本原理是,当这种材料受到电场激发时,会引起材料及其表面的体积变化,从而通过这一运动效应,在不同的应用领域发挥出各种不同的功能。
人工肌肉的许多特点和特性,如柔软可塑、可逆损伤、自愈能力强等,与真正的生物肌肉十分类似。
三、人工肌肉的应用针对不同的应用场景,人工肌肉可以被制成不同形态的机器人元件,例如灵活的手指、腿部的关节、甚至是更复杂的生物内科学工具。
下面,我们将详细讨论人工肌肉的现有和潜在的几个应用领域。
1.仿生机器人人工肌肉作为一种替代传统机器人的重要材料,可以被广泛的应用在现代仿生机器人的设计中。
比如,在机器人手臂中,人工肌肉能够比传统机器人手臂更加灵活地模拟人的手部运动,让机器人能够更好地模拟人的动作,或者实现更高的精准度和复杂性。
这些机器人可以在医疗、教育、工程等领域中发挥出巨大的作用。
2.医疗器械人工肌肉还可以应用于制作医疗器械,医用人工肌肉在仿真医学领域具有潜在的应用价值。
例如,人工心脏中应用电致活性材料的人工肌肉能够更好地模拟正常的心脏肌肉收缩和松弛,与当前的心脏辅助装置的机械结构相比,更为生理学的模拟可能会带来更好的治疗效果和患者的生活质量。
此外,在手术器械和生物传感器等领域中,人工肌肉也有着广泛的应用前景。
气动人工肌肉

McKibben气动人工肌肉的测量和建模Ching-Ping Chou and Blake HannafordMember, ZEEE摘要:本文报道了测量和建模McKibben人工肌肉气动执行机构。
此装置,首先在1950年开发的,包含扩大管周围编织线。
我们通过静态和动态长度张力的测试结果,得出一个线性模型。
并将结果与人体的肌肉属性相比较,以评估是否适合人体肌肉仿真。
McKibben执行器基于生物学的机器人手臂。
一、引言McKibben气动人工肌肉的研究在1950年和1960年,主要是发达的假肢。
他们最近被商业化的日本机器人应用普利司通橡胶公司的J.温特斯博士用来重新设计建造生物力学逼真的骨骼模型。
McKibben肌肉包括一个内部膀胱周围由编织网是连接外壳(具有灵活且不可扩展的线程)在两端的接头或一些类似肌腱的结构(图1(a)条)。
当膀胱加压,高的高压气体推压其内表面上,并针对外部的外壳,且很容易增加其体积。
由于纵向刚度非常高的编织网壳中的线程,执行器缩短根据它的容量的增加和/或,如果它产生张力被耦合到一个机械负载。
这种物理配置导致McKibben本的肌肉有可变刚度春天的特性,非线性弹性被动,身体的柔韧性,和很轻的重量比其他种类的人工致动器[9]。
之间的关系紧张,长度,速度不同的激活是主要特征从类型区分。
人骨骼肌也有其自己的特殊特性:例如,凸状主动张力长度关系[5],非线性被动拉伸长度的关系,和双曲张力速度关系[11]。
每个属性也是一个函数激活电平[14],[18],[19]。
为了说明的相似性(或不)生物肌肉,三种类型的McKibben肌肉,两个普利司通设计者和博士共同进行了测试。
另外,由于气动执行器,实验和建模简单的气动回路都包括在内。
在本文中,所有的实验,理论,建模,和模拟分为四个主要部分:准静态和动态拉伸长度的关系;第三节,气动回路;第四节,等距等渗实验和第五节,能源转换和效率估计。
第二节:1)一个理想化的静态McKibben的肌肉的物理模型进行分析一个简单的理论方法,2)动态试验机将描述;3)的一系列准静态和动态实验进行说明,显示的速度不敏感紧张长度滞后;4)简化的静态模型将描述基于实验数据和一个理论方法和5)的准静态和动态特性进行分析。
国家863计划项目,智能材料与仿生结构一体化的人工肌肉柔顺驱动单元研究与开发
国家863计划项目,智能材料与仿生结构一体化的人工肌肉柔顺驱动单元研究与开发《国家863计划项目:智能材料与仿生结构一体化的人工肌肉柔顺驱动单元研究与开发》序近年来,随着科技的快速发展,智能材料和仿生结构的研究逐渐成为科研领域的热门话题。
而在国家863计划项目中,智能材料与仿生结构一体化的人工肌肉柔顺驱动单元研究与开发更是备受关注。
本文将通过对此项目的全面评估,探讨其意义、前景及研究进展,旨在帮助读者深入了解这一领域的重要性和挑战。
一、项目背景国家863计划项目作为我国重要的科技攻关计划之一,一直致力于推动科技创新及成果转化。
智能材料与仿生结构一体化的人工肌肉柔顺驱动单元研究与开发作为该计划项目的重要子课题之一,旨在发展新型智能材料及驱动技术,实现仿生结构在工程实践中的应用,对于推动我国科技水平的提升具有重要意义。
二、项目意义该项目旨在解决传统机械驱动单元在柔性控制和高效能方面的不足,借鉴生物肌肉组织的结构与功能,开发智能材料驱动技术,从而实现人工肌肉柔顺驱动单元的研究与开发。
这一技术的成功应用将对机器人、生物医学和生产制造等领域产生深远影响,为我国科技创新注入新的动力,提高国家综合实力和国际竞争力。
三、研究进展目前,该项目已取得了一系列重要的研究成果。
在智能材料方面,团队通过对智能合金、电致变色材料等的研究,成功开发出具有形变和感应性的新型智能材料。
在仿生结构方面,通过对生物肌肉组织的结构与功能进行深入研究,团队成功实现了人工肌肉柔顺驱动单元的仿生设计与制造。
团队还在柔性控制和高效能方面取得了突破,为项目的后续研究奠定了坚实基础。
四、展望与应用随着研究的不断深入,人工肌肉柔顺驱动单元技术将在未来的机器人、生物医学和生产制造等领域得到广泛应用。
在机器人领域,该技术的成功应用将使机器人具备更加灵活和智能的特性,为我国制造业发展注入新的活力;在生物医学领域,人工肌肉柔顺驱动单元技术的应用将使仿生假肢、智能支具等得到新的突破,为残疾人群体带来更多的希望和便利。
人造肌肉的材料和制造技术

人造肌肉的材料和制造技术自古以来,人类一直在探索如何模拟自然界的各种生物物质和生物过程,以便应用于工业、医疗等领域。
肌肉作为人体最重要的器官之一,承担着使人体活动、运动等功能,一直是人类关注的研究领域之一。
而人造肌肉作为模拟、替代自然肌肉的一种材料和技术,正越来越受到科技界的关注和研究。
本文将从材料性能和制造技术两个方面,介绍人造肌肉的研究现状和发展趋势。
一、人造肌肉的材料性能人造肌肉材料需要具备以下特性:1. 类似肌肉的收缩和膨胀能力人类肌肉的收缩和膨胀能力是其最基本的功能之一,人造肌肉的材料也需要具备类似的特性。
目前,科学家们已经开发出了能够收缩和膨胀的人造肌肉材料,如聚合物、金属合金、碳纤维等,可以通过电场、热量和化学反应等方式来实现类似肌肉的收缩和膨胀。
2. 高度可控性人造肌肉材料需要具备高度可控性,能够以某种方式或某种程度调节其收缩和膨胀的速度和幅度。
这需要科学家们在研究和制造人造肌肉材料时,采用一定的制造工艺和材料修饰手段,以实现材料的可控性。
3. 高韧性和耐久性人造肌肉材料还需要具备高韧性和耐久性。
这是因为肌肉在长时间和高频率运动时需要承受较大的力量和摩擦,因此材料需要具备抗拉、抗压、耐磨等基本机械特性。
二、人造肌肉的制造技术人造肌肉的研究和制造是一个高度综合性和跨学科的领域,需要动力学、材料科学、化学、机械制造等专业技术的支持。
在人造肌肉的制造技术方面,主要有以下几种方法:1. 仿生学方法仿生学是一种通过模拟自然界生物物质和生物过程,来设计、制造和应用人造材料和器件的技术。
其制造人造肌肉的方法是,以生物肌肉为样板,模拟其结构、材料成分和运动机制,通过分子设计、材料合成等手段,制造出与自然肌肉类似的人造肌肉材料。
2. 智能材料方法智能材料是一种能够对外界刺激做出响应的材料,其常见的响应方式包括形变、颜色变化等。
在制造人造肌肉时,一些智能材料,如聚乙烯、液晶材料等,可以通过外部电场、温度等刺激而形成收缩或膨胀的形变效应,从而模拟自然肌肉的功能。
北京理工大学科技成果——气动人工肌肉在仿生机器人中的应用技术

北京理工大学科技成果——气动人工肌肉在仿生机器人中的应用技术成果简介气动人工肌肉驱动器具有较强的柔性及仿生性,其高功率/质量比的特点使之在仿人机器人技术领域中具有无可比拟的优势。
对气动人工肌肉的静、动态特性深入进行了建模与实验研究,进行了气动人工肌肉驱动的关节特性分析及位置控制研究。
分别研制出气动人工肌肉驱动的仿人灵巧手,以及十四自由度双臂机器人,通过简单的材料制作出性能优异的气动人工肌肉,辅之模糊自适应控制、协调控制等高精度气动伺服控制技术,实现了灵巧手基于数据手套的主从抓持操作、机械臂自动驾驶方向盘等动作。
该研究为气动人工肌肉的广泛应用奠定了坚实的理论与工程基础。
气动人工肌肉(左)和仿人灵巧手(右)项目来源国家自然科学基金项目技术领域新型驱动器,仿人机器人应用范围低成本研究性仿人机器人;医疗护理性机器人;家政服务型机器人;空间探索性抓持器。
技术特点以仿人五指灵巧手骨架为核心,气动人工肌肉驱动,柔索传动。
由一对肌肉驱动一个手指关节,高响应压电比例阀控制气动人工肌肉的内部压力,从而改变肌肉的收缩长度及输出力,最终控制关节角度的变化。
采用模糊PID对单关节进行控制,关节空间的轨迹规划来自人手佩戴的数据手套的反馈信息,由此构成实时主从控制效果。
灵巧手的外观具有很好的仿人性,亲和力较强,在主从控制下可以完成各种手势运动及简单的抓持操作。
双臂机器人采用对称式结构设计,每个手臂均具有七个自由度,其中肩关节有三个自由度,肘关节有两个自由度,腕关节亦有两个自由度。
单臂控制器由带重力补偿器和摩擦力补偿器的模糊自适应PID 控制,最大的跟踪误差小于0.08rad。
双臂协调控制,即在双臂控制回路之间插入动态模糊协调控制器,通过对比双臂对应关节的角位移误差大小,按一定模糊规则对各控制量进行补偿。
双臂机器人技术创新低成本气动人工肌肉的研制,十七自由度仿人灵巧手的研制,十四自由度双臂机器人的研制,基于数据手套的灵巧手主从控制,双臂机器人的协调控制。
气动肌肉 综述

气动肌肉综述
气动肌肉是一种基于气压控制的机电一体化产品,具有较高的灵活性和自适应性,广泛应用于机器人、医疗器械、运动辅助器具等领域。
气动肌肉的工作原理是利用空气的压力来驱动肌肉扩张和收缩,达到类似人类肌肉的运动效果。
相比于传统的电动机械驱动,气动肌肉具有更快的响应速度和更好的力量控制性能,可以实现更加自然的运动模式和更高的运动精度。
气动肌肉的种类繁多,包括单向和双向气动肌肉、圆柱形和扁平形气动肌肉、线性和旋转气动肌肉等,各种类型的气动肌肉都有其独特的应用场景和特点。
未来随着气动技术的不断发展和应用范围的扩大,气动肌肉必将成为机电一体化领域的重要组成部分,为人们带来更加智能、高效、自然的机器人和运动辅助器具产品。
- 1 -。
气动人工肌肉及其在双足机器人中的应用文档资料ppt课件

参数说明: b:纤维长度; n:编织纤维的圈数; θ:气动人工肌肉编织角; D :加压前气动人工肌肉直径;
图 气动肌肉理想几何模型
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
微小化,而电机、气缸和液压驱动器则难以达到这一要求;
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
1.2 生物肌肉的组成
图 生物肌肉的结构图 人体全身有639块骨骼肌,众多肌束,约60亿条呈圆柱形的肌纤维组成。 每块肌肉表面由称作“肌包膜”的结缔组织包裹着。肌肉内分布着血管和神 经,负责调节肌肉的收缩和舒张。
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
2、气动人工肌肉介绍
早在20世纪50 年代,美国医生McKibben 出于帮助手臂有残疾的人实 现肢体矫正目的,发明了一种驱动假肢运动的气动执行元件, 即McKibben 气动人工肌肉,(Pneumatic Artificial Muscle, PAM) 。
SMA EAP PZT PAM
>40
>5 >40 0. 09 >15
L s~ s
s L s~ s L s~ s
s
>100
>1000 >5
>1000 >1000