列车运行控制速度曲线
列车运行控制系统的特性
列车运行控制系统的特性1.列控信息列控信息是指列控地面设备之间、列控地面设备与地面外部设备之间、列控车载设备之间、列控车载设备与列车外部设备之间、列控地面设备与列控车载设备之间传输的信息。
列控信息是列车运行控制系统的神经中枢,是列车运行控制系统正常工作的基础。
通常,列控信息主要指列控地面设备与列控车载设备之间传输的信息。
列控信息分为安全信息和非安全信息。
直接与行车安全相关的信息属于安全信息,如行车许可、空闲闭塞分区数量、进路信息、临时限速、等级切换、列车位置和速度等;非安全信息是列控辅助信息,如列车编组、列车长度、始发/目的站、司机乘务组编号等。
列控信息的信息量和实时性应满足不同速度、不同密度、不同运输方式及不同列车控制方式的要求。
列控信息的信息量首先应满足列车安全追踪间隔的距离要求。
(1)列控信息的信息量。
(2)列控信息的实时性。
2.列车追踪间隔距离和间隔时间同一方向上的两趟列车,彼此以闭塞分区相间隔追踪运行,前一列车的尾部与后一列车的头部之间所保持的最小间隔时间,称作追踪间隔时间。
计算追踪间隔时间时应分别计算区间列车追踪间隔时间、车站同方向发车追踪间隔时间及车站同方向到达的追踪间隔时间。
比较这三种追踪间隔时间,取其中最大的数值,作为追踪间隔时间。
既有线三显示和四显示信号系统中,列车控制采用分级阶梯码方式,而高速铁路则采用速度目标距离模式曲线方式(一次模式曲线)。
因此,既有线的列车追踪间隔时间计算公式不适用于高速铁路。
高速铁路列车追踪间隔时间的计算包括以下几部分:(1)区间列车追踪间隔时间。
(2)车站同方向到达追踪间隔时间。
(3)车站同方向发车追踪间隔时间。
3.RAMS(1)系统安全性。
(2)可靠性和有效性。
①平均无故障时间(mean time between failure,MTBF)。
②平均无故障运行时间(mean time between services failure,MTBSF)。
列车运行控制速度曲线
列车运行控制速度曲线
Lt
D
实验一:绘制列车限制速度曲线
实验报告
一.实验目标
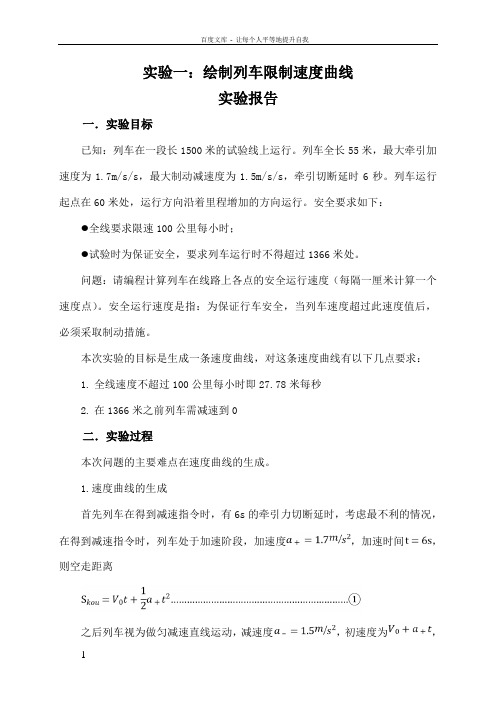
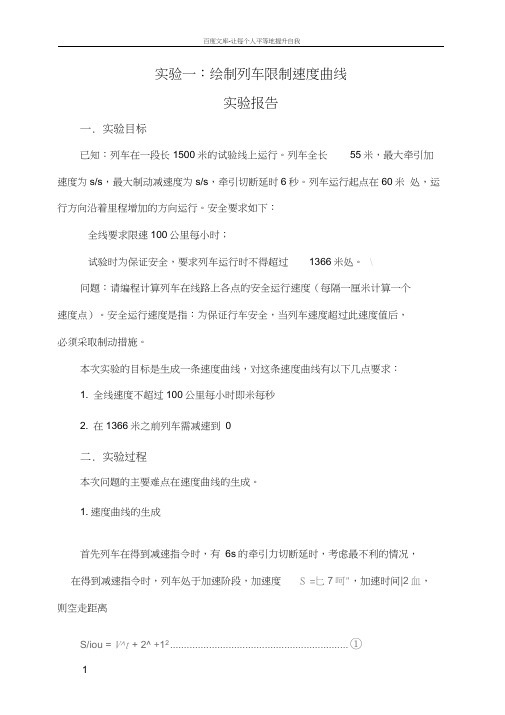
:列车在一段长1500米的试验线上运行。列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。列车运行起点在60米处,运行方向沿着里程增加的方向运行。安全要求如下:
全线.实验过程
本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成
首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度a= 1.7 m⁄s2,加速时间t = 6s,
那末空走距离
1
Skou=V0t2at2… … … … … … … … … … … … … … … … … … … … … … ①
试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在路线上各点的安全运行速度〔每隔一厘米计算一个速度点〕。安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:
1.全线速度不超过100公里每小时即27.78米每秒
中国轨道交通列车运行控制技术及应用

中国轨道交通列车运行控制技术及应用宁滨;刘朝英【摘要】中国的轨道交通在近十年中获得了飞速发展,城市轨道交通有效解决了市内交通供需矛盾,高速铁路的发展则给城市间的交通带来了同城效应和零换乘的理念.但无论如何,轨道交通的安全运营是其发展的重中之重.列车运行控制系统是确保轨道交通安全的关键技术之一,在我国得到了快速地自主创新发展.本文详细介绍了中国铁路列车运行控制系统(CTCS)技术和城市轨道交通基于通信的列车运行控制系统(CBTC)技术.为实现综合轨道交通网络的互联互通,轨道交通的低碳节能运营、自动化和智能化运营,实现资源共享的网络化运营模式,轨道交通列车运行控制系统将向着系统化、网络化、智能化、通信信号一体化和标准化、开放化的方向发展,通过降低系统复杂性、缩短列车追踪间隔、提高系统防护水平等技术降低成本,提高运能和旅客满意度,保证轨道交通的安全性和可靠性,最终实现安全、高效、绿色出行.%With the rapid development of rail transit system in China in recent ten years , the problem of heavy traffic in cities has been solved effectively . The development of high-speed railway in China has resulted in none-transfer between the cities and changed the traditional concepts of time and space . However , safe opera-tion is the most important for the development of rail transit . The train control system ,as one of the key tech-nologies to ensure the safety of the rail transit , has beenunder rapid development in China through independent innovation . The train operation control system used in China railway (CTCS) and the communication-based train control system used in China urban rail transit (CBTC) were described in this paper . In order to satisfy the requirementsof connectivity for integrated rail transit network , low carbon energy efficient , automated and intelligent operation of rail transit system , and the network operation mode based on resource sharing , the train operation control system of the rail transit will developtowards systematization ,information networking , intelligence ,communication & signal integration , standardization andopenness . The reduction of the com-plexity of the system , the shortening of the train tracking interval , and the improvement of system protection level will lead to the reduction of the cost and carbon footprint and the improvement of transport capacity and passenger satisfaction ,which will ensure the safety and reliability of rail transit ,and ultimatelyachieve safe , efficient and green travel .【期刊名称】《铁道学报》【年(卷),期】2017(039)002【总页数】9页(P1-9)【关键词】高速铁路;城市轨道交通;列车运行控制系统【作者】宁滨;刘朝英【作者单位】北京交通大学,北京 100044;中国铁路总公司,北京 100844【正文语种】中文【中图分类】U284中国的轨道交通在近十年中获得了飞速发展,城市地铁、轻轨等轨道交通系统有效解决了市内交通供需矛盾,高铁成网、同城效应、高铁零换乘理念等给旅客出行带来了极大方便,拉近了城市间的距离,加快推进了城乡一体化发展,提升了中国的现代化水平。
列车运行控制实验报告
实验一:绘制列车限制速度曲线一、实验内容二、问题分析根据题目要求画出全线的限速示意图如下:速度防护曲线应该是全线各个限制条件共同作用下的最低速度,所以应该分别绘制出400~500米的速度限制曲线,550~700米的速度限制曲线,1450米处停车的速度限制曲线,和全线的限速,最后在每一个距离点处取不同限速曲线速度点的最小值,最终形成的曲线就是速度防护曲线。
首先设计1450m处停车的速度限制曲线,列车在制动过程中,近似做初速度为当前速度,末速度为0的匀减速直线运动,减速度为1.7m/s/s,根据牛顿运动学公式:但是,当车载设备输出制动命令时列牵引切断和力真正达到100% 需要一定时间,称为制动延。
因此,车载设备开始触发制动需经过两个阶段。
第一阶段为空走阶段,列车制动力为0,做持续时间是牵引切断延时的匀速直线运动;第二阶段才为完全制动阶段。
所以实际的目标距离会更短,考虑制动延时后目标距离减少了4*Vm,在保证安全的前提下,Vm取全线限速的最大值,即100km/h。
所以:400m处和550m处的速度限制曲线也用同样的表达式绘制,只需要改变目标距离x和Vt的值。
经过上述分析,得到速度限制曲线的Matlab表达式如下:400米处:v3=(sqrt(2*a*(400-s-s1)+vt_1^2)*3.6) .*(s<=400-s1)550米处:v4=(sqrt(2*a*(550-s-s1)+vt_2^2)*3.6) .*(s<=550-s1)1450米处:v1=sqrt(2*a*(1450-s-s1)+vt^2)*3.6;当列车从低速限速区段驶入高速限速区段时,要保证车尾通过低速限速区段才能解除限速,所以低限速区间的长度应该延长车长70m,Matlab表达式如下:400~500限制速度:90.*(s>400-s1 & s<=500+l)550~700限制速速:45.*(s>550-s1 & s<=700+l)全线限制速度:v2=100.*(s>=60 & s<=1450);使用分段函数绘制出各个限制条件下的速度-距离曲线,再用函数v=min([v1,v2,v3,v4]),得到每个距离点s上对应的最小速度点v。
铁路信号运营基础 第四章列车运行控制 知识点总结
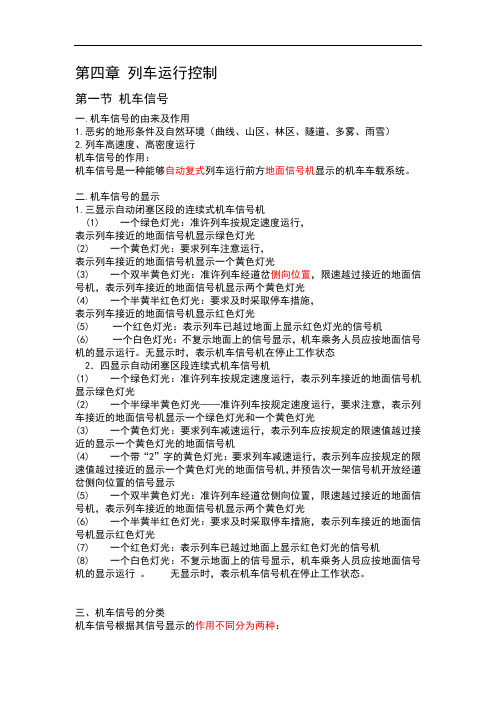
第四章列车运行控制第一节机车信号一.机车信号的由来及作用1.恶劣的地形条件及自然环境(曲线、山区、林区、隧道、多雾、雨雪)2.列车高速度、高密度运行机车信号的作用:机车信号是一种能够自动复式列车运行前方地面信号机显示的机车车载系统。
二.机车信号的显示1.三显示自动闭塞区段的连续式机车信号机(1) 一个绿色灯光:准许列车按规定速度运行,表示列车接近的地面信号机显示绿色灯光(2) 一个黄色灯光:要求列车注意运行,表示列车接近的地面信号机显示一个黄色灯光(3) 一个双半黄色灯光:准许列车经道岔侧向位置,限速越过接近的地面信号机,表示列车接近的地面信号机显示两个黄色灯光(4) 一个半黄半红色灯光:要求及时采取停车措施,表示列车接近的地面信号机显示红色灯光(5)一个红色灯光:表示列车已越过地面上显示红色灯光的信号机(6)一个白色灯光:不复示地面上的信号显示,机车乘务人员应按地面信号机的显示运行。
无显示时,表示机车信号机在停止工作状态2.四显示自动闭塞区段连续式机车信号机(1) 一个绿色灯光:准许列车按规定速度运行,表示列车接近的地面信号机显示绿色灯光(2) 一个半绿半黄色灯光——准许列车按规定速度运行,要求注意,表示列车接近的地面信号机显示一个绿色灯光和一个黄色灯光(3) 一个黄色灯光:要求列车减速运行,表示列车应按规定的限速值越过接近的显示一个黄色灯光的地面信号机(4) 一个带“2”字的黄色灯光:要求列车减速运行,表示列车应按规定的限速值越过接近的显示一个黄色灯光的地面信号机,并预告次一架信号机开放经道岔侧向位置的信号显示(5) 一个双半黄色灯光:准许列车经道岔侧向位置,限速越过接近的地面信号机,表示列车接近的地面信号机显示两个黄色灯光(6) 一个半黄半红色灯光:要求及时采取停车措施,表示列车接近的地面信号机显示红色灯光(7) 一个红色灯光:表示列车已越过地面上显示红色灯光的信号机(8) 一个白色灯光:不复示地面上的信号显示,机车乘务人员应按地面信号机的显示运行。
列车运行控制速度曲线

实验一:绘制列车限制速度曲线实验报告一.实验目标已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:●全线要求限速100公里每小时;●试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:1.全线速度不超过100公里每小时即27.78米每秒2.在1366米之前列车需减速到0二.实验过程本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度,加速时间,则空走距离之后列车视为做匀减速直线运动,减速度,初速度为,末速度为0,则刹车距离根据要求,有其中是列车距防护点的距离,取最不利情况即带入数据,根据①②③可得其防护速度与当前列车距防护点距离的关系式为当时,2.程序的编写使用matlab进行编程,算法流程如下图:限速计算函数:function [ v ] = xiansu( sz,s,vt )v=-19.2+0.5*sqrt(691.2+12*(sz-s));if v> vtv= vt;endif v<=0v=0;endend其中sz为防护点位置,s为当前列车位置,vt为列车限速,v为防护速度。
主函数V=zeros(1,150001); %设置速度数组S=0:0.01:1500; %设置距离数组Vt=100/3.6; %设置最高限速Sz=1366; %设置防护点距离for k=1:150000 %计算防护速度V(k)=xiansu(Sz,S(k),Vt);endVa=V*3.6; %速度转换为km/hSa=S/1000; %距离转换为kmplot(Sa,Va) %画图grid onxlabel('位置(km)')ylabel('速度(km/h)')title('列车速度防护曲线')axis([0 1.5 0 120])V=V*100; %速度转换为cm/sS=S*100; %距离转换为cmT = [S;V];fileID = fopen('列车防护速度.txt','wt'); fprintf(fileID,'%.2f,%.2f\n',T);fclose(fileID);三.实验结果分析利用matlab画出的图像如下图所示:该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。
列车运行控制速度曲线
实验一:绘制列车限制速度曲线实验报告一.实验目标已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:●全线要求限速100公里每小时;●试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:1.全线速度不超过100公里每小时即27.78米每秒2.在1366米之前列车需减速到0二.实验过程本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度,加速时间,则空走距离之后列车视为做匀减速直线运动,减速度,初速度为,末速度为0,则刹车距离根据要求,有其中是列车距防护点的距离,取最不利情况即带入数据,根据①②③可得其防护速度与当前列车距防护点距离的关系式为当时,2.程序的编写使用matlab进行编程,算法流程如下图:限速计算函数:function [ v ] = xiansu( sz,s,vt )v=-19.2+0.5*sqrt(691.2+12*(sz-s)); if v> vtv= vt;endif v<=0v=0;endend其中sz为防护点位置,s为当前列车位置,vt为列车限速,v为防护速度。
主函数V=zeros(1,150001); %设置速度数组S=0:0.01:1500; %设置距离数组Vt=100/3.6; %设置最高限速Sz=1366; %设置防护点距离for k=1:150000 %计算防护速度V(k)=xiansu(Sz,S(k),Vt);endVa=V*3.6; %速度转换为km/hSa=S/1000; %距离转换为kmplot(Sa,Va) %画图grid onxlabel('位置(km)')ylabel('速度(km/h)')title('列车速度防护曲线')axis([0 1.5 0 120])V=V*100; %速度转换为cm/sS=S*100; %距离转换为cmT = [S;V];fileID = fopen('列车防护速度.txt','wt');fprintf(fileID,'%.2f,%.2f\n',T);fclose(fileID);三.实验结果分析利用matlab画出的图像如下图所示:该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。
第八章列车运行控制系统铁路信号基础
▪ 按照闭塞方式分类 • 固定闭塞列控系统:将线路划分为固定的闭塞 分区,前后列车的位置及间隔,均以闭塞分区 为单元来检测和表示。 • 移动闭塞列控系统:不存在固定的闭塞分区, 列车之间的安全追踪间隔随着列车运行而不断 移动且变化。
Company Logo
▪ 按照功能和自动化程度分类
Company Logo
8.1 列控系统概述
列车运行控制系统是由地面设备和车载设备构 成,用来控制列车运行速度,保证行车安全,提高 运输能力。
列车运行控制系统的功能是: 1)检测线路的空闲状态; 2)检测列车完整性; 3)列车运行授权; 4)指示列车安全运行速度; 5)监控列车安全运行。
Company Logo
德国LZB系统是基于轨道电缆传输的列控系统, 是世界上首次实现连续速度控制模式的列控系统, 技术上是成熟的。1965年在慕尼黑-奥斯堡间首次运 用,德国已装备了2000km铁路线,1992年开通了西 班牙马德里—塞维利亚471km高速线。
Company Logo
欧洲是世界轨道交通最发达的地区,欧洲现有 的列车运行控制系统种类繁多。为克服欧洲各国信 号制式复杂、互不兼容,保证高速列车在欧洲铁路 网内互通互行,在欧洲共同体的支持下,欧洲各信 号厂商联合制订ERTMS/ETCS技术规范。
在分级曲线控制方式下,列车在一个闭塞分 区中运行时,列控设备判定列车超速的目标速度不 再是一个常数,而是随着列车行驶不断变化,即 是距离的函数。
Company Logo
分段速度—距离控制模式基本原理
S1+S2 S4 S3
设备监督曲线
制动性能差的车 制动性能好的车
S 分段速度控制模式 S=(S1+S2+S3+S4)*n
列车运行控制速度曲线

实验一:绘制列车限制速度曲线实验报告一.实验目标已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为s/s,最大制动减速度为s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:●全线要求限速100公里每小时;●试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:1.全线速度不超过100公里每小时即米每秒2.在1366米之前列车需减速到0二.实验过程本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度,加速时间,则空走距离之后列车视为做匀减速直线运动,减速度,初速度为,末速度为0,则刹车距离根据要求,有其中是列车距防护点的距离,取最不利情况即带入数据,根据①②③可得其防护速度与当前列车距防护点距离的关系式为当时,2.程序的编写使用matlab进行编程,算法流程如下图:结束V(k)=VK+1开始当前距防护点位置S(k)速度是否大于全程限速Vt 计算防护速度VV(k)=Vt全程计算结束限速计算函数:function [ v ] = xiansu( sz,s,vt ) v=+*sqrt+12*(sz-s));if v> vtv= vt;endif v<=0v=0;endend其中sz为防护点位置,s为当前列车位置,vt为列车限速,v为防护速度。
主函数V=zeros(1,150001); %设置速度数组S=0::1500; %设置距离数组Vt=100/; %设置最高限速Sz=1366; %设置防护点距离for k=1:150000 %计算防护速度V(k)=xiansu(Sz,S(k),Vt);endVa=V*; %速度转换为km/hSa=S/1000; %距离转换为kmplot(Sa,Va) %画图grid onxlabel('位置(km)')ylabel('速度(km/h)')title('列车速度防护曲线')axis([0 0 120])V=V*100; %速度转换为cm/sS=S*100; %距离转换为cmT = [S;V];fileID = fopen('列车防护速度.txt','wt');fprintf(fileID,'%.2f,%.2f\n',T);fclose(fileID);三.实验结果分析利用matlab画出的图像如下图所示:该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。
2.1铁路曲线概述

(4)线路大中修竖曲线设置
◆线路大中修时,允许速度不大于160km/h的线路,采用抛物线型 竖曲线时,若相邻坡段的坡度代数差大于2‰,应设置竖曲线。 20m范围内竖曲线的变坡率,凸形不应大于1‰,凹形不应大于 0.5‰。采用圆曲线型竖曲线时,若相邻坡段的坡度代数差大于3‰, 应设置竖曲线,竖曲线半径不应小于10000m。
◆因为三次抛物线,具有线型简单,长度短而实用,便于 测设和养护维修,所以我国铁路采用超高为直线的顺坡、 平面为三次抛物线的缓和曲线。
(4)圆曲线和夹直线
◆圆曲线和夹直线最小长度应保证车辆通过圆曲线或夹直 线两端缓和曲线时,车辆后轴在缓和曲线终点(指缓圆点 或缓直点)产生的振动,与车辆前轴在另一缓和曲线起点 (指圆缓点或直缓点)产生的振动不叠加,以保证列车运 行的平稳性和旅客舒适度,如表2-5所示。
2.1.2曲线的技术条件
1.平面曲线 1 曲线半径 12000、10000、8000、7000、6000、5000、4500、4000、3500、 3000、2800、2500、2000、1800、1600、1400、1200、1000、800、 700、600、550、500(Ⅲ、Ⅳ级铁路含450、400、350、300) ◆圆曲线的最大半径Rmax:12000 √问题:为会要规定圆曲线的最大半径? ◆圆曲线的最小半径Rmin √问题:影响圆曲线最小半径的主要因素有哪些?
(3)客货共线铁路、重载铁路竖曲线
◆路段设计速度为160 km/h及以上的线路,当相邻坡段的坡度差大 于1‰,路段设计速度为160 km/h以下的线路,当相邻坡段的坡 度差大于3%,采用圆曲线型竖曲线连接,竖曲线半径分别不得小 于15 000m和10 000m。
◆改建既有线时,当既有线是采用抛物线型竖曲线,且折算竖曲线 半径不小于上述规定时,可保留既有线的坡段连接标准。特别困 难条件下,竖曲线的位置可不受缓和曲线位置的限制。
列车运行控制速度曲线
实验一:绘制列车限制速度曲线实验报告一.实验目标已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为s/s,最大制动减速度为s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:全线要求限速100公里每小时;试验时为保证安全,要求列车运行时不得超过1366米处。
\问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:1. 全线速度不超过100公里每小时即米每秒2. 在1366米之前列车需减速到0二.实验过程本次问题的主要难点在速度曲线的生成。
1. 速度曲线的生成首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度S =匕7呵",加速时间|2血,则空走距离S/iou = V^t + 2^ +12................................................................ ①之后列车视为做匀减速直线运动,减速度= IM/",初速度为人+ " + r,末速度为0,则刹车距离S shu=^^-.............................................. ②根据要求,有其中s是列车距防护点的距离,取最不利情况即\^5 沖廿[1 $/才1] hr" ****・" bl・*******・* ****** *・*■ "**9**1 ・・***・**1*・ »*****・・* 1・****1**・・1 /带入数据,根据①②③可得其防护速度与当前列车距防护点距离S的关系式为-38.4 + ^'691.2 + 125 \=-------------- 为---------------- \当V Q> 27.78时V n= 27.782. 程序的编写使用matlab进行编程,算法流程如下图:限速计算函数:fun cti on [ v ] = xia nsu( sz,s,vt ) v=+*sqrt+12*(sz-s));if v> vtv= vt;endif v<=0v=0;endendv为防护速度。
列车运行控制系统_华东交通大学中国大学mooc课后章节答案期末考试题库2023年

列车运行控制系统_华东交通大学中国大学mooc课后章节答案期末考试题库2023年1.LKJ2000型监控装置可以记录距前方信号机距离。
参考答案:正确2.列车在过分相时()参考答案:不受制动力,也不受牵引力3.CTCS-3级列控系统由()生成行车许可参考答案:RBC4.应答器信息处理模块的英文缩写()参考答案:BTM5.机车信号主机有两块主机板,两块电源板一块转换板和一块记录板构成参考答案:正确6.临时限速计划调度命令内容由TCC系统负责拟定参考答案:错误7.CTCS-3级列控系统,()实现列车定位检查。
参考答案:应答器8.CTCS-3列控系统中,计算机联锁向无线闭塞中心RBC主要传输以下哪项信息()参考答案:进路状态信息9.CTCS-3级列控系统只能实现地对车的单向通信参考答案:错误10.CTCS-3级的最小追踪间隔是()分钟参考答案:311.主体化设备中新的LED显示器比灯丝灯泡显示具有更高的可靠性。
参考答案:正确12.单个MA只能包括一个连续锁闭进路参考答案:错误13.双套热备是指机车信号主机内具有双套主机板及双套电源和双路接收线圈共同组成的双套热备系统。
参考答案:正确14.行车许可MA生成需要()参考答案:列车位置模式等级_闭塞分区状态_线路描述信息_TSR15.调车模式下,牵引运行限制速度为()Km/h参考答案:4016.GSM-R网络在CTCS-3级列控系统中无需覆盖极间转换所需要的区域参考答案:错误17.附加阻力是指在理想理想线路条件上运行受到的额外阻力参考答案:错误18.CTCS-3级列控系统工作模式有9种参考答案:正确19.LKJ2000型监控装置采用()英寸TFT高亮度彩色液晶显示器参考答案:1020.事故状态记录器(黑匣子)将记录()min以内的最新列车运行状态数据参考答案:3021.列车走行距离超过( )m,事故状态记录器(黑匣子)将产生一次相关参数记录。
参考答案:522.LKJ2000型监控装置屏幕显示器显示()参考答案:限制速度曲线_线路状态信息_实际速度曲线23.列车运行监控记录装置主要用于时速160Km/s以下的路段参考答案:正确24.列车运行监控记录装置可以提高运输效率,保证行车安全。
第六章 列车运行控制
320
320
300
270
230
170
35
000
红灯
320 300 270
230
170
列车实际运行曲线
ATP 防护曲线
限
制
速
度
区
35
320
320
300
270
230
170
35
000
未确定
第14页
二、曲线速度防护模式
2.目标—距离(DISTANCE TO GO)曲线控制模式
目标-距离模式曲线控制不再对每一个闭塞分区规定一个目标速度, 而是向列车传送目标速度、目标距离(可包含多个闭塞分区)。
Km/h 200
150
100
50
0
200
160
100
0
分段制动和一次制动方式示意图
分段制动需要多个空走距离和安全距离,若采用一次制动只需要一个空走距
离和安全距离。
第8页
二、曲线速度防护模式
1.分级曲线速度控制模式 每个闭塞分区仍然给定一个目标速度。
320
320
300
270
230
170
35
000
闭塞分区分界处绝缘节位置相对固定,且两边闭塞分区传输信息不同。 列车可以根据接收到信息的变化来了解通过绝缘节的时机,从而获得列 车位置信息。
甲站
乙站
f5
f1
f3
f5
f1
f3
f2
f4
f6
f2
f4
f6
分区1
分区2
分区3
分区4
第22页
三、列控系统关键技术
2>计轴器定位方法 计轴传感器安放也是固定的,通过计轴器检测列车占用或者出清对应计 轴区段也可以获得列车位置信息。
列车运行控制系统

列车运行控制系统定义:由列控中心、闭塞设备、地面信号设备、地车信息传输设备、车载速度控制设备构成的用于控制列车运行速度保证行车安全和提高运输能力的控制系统。
功能:1. 线路的空闲状态检测;2. 列车完整性检测3. 列车运行授权;4. 指示列车安全运行速度;5. 监控列车安全运行系统分类发达在列控系统研究方面已有较长发展历史,比较成功的列控系统主要有:日本新干线ATC系统,法国TGV铁路和韩国高速铁路的TVM30C及TVM430系统,德国及西班牙铁路采用的LZB系统,及瑞典铁路的EBICA900系统等。
上述列车控制系统都具有自己的特点、不同的技术条件和适应范围,因此,列控系统可以分成许多类型。
(1)按照地车信息传输方式分类:①连续式列控系统,如:德国LZB系统、法国TVM系统、日本数字ATC系统。
连续式列控系统的车载设备可连续接收到地面列控设备的车- 地通信信息,是列控技术应用及发展的主流。
采用连续式列车速度控制的日本新干线列车追踪间隔为 5min ,法国TGV北部线区间能力甚至达到 3 min。
连续式列控系统可细分为阶梯速度控制方式和曲线速度控制方式。
②点式列控系统,如:瑞典EBICAB系统。
点式列控系统接收地面信息不连续,但对列车运行与司机操纵的监督并不间断,因此也有很好的安全防护效能。
③ 点一连式列车运行控制系统,如: CTCS2级,轨道电路完成 列车占用检测及完整性检查,连续向列车传送控制信息。
点式 信息设备传输定位信息、进路参数、线路参数、限速和停车信 息。
( 2 )控制模式分,分为两种类型:① 阶梯控制方式出口速度检查方式,如:法国 TVM300系统入口速度检查方式,如: 日本新干线传统 ATC 系统② 速度—距离模式曲线控制方式速度-距离模式,如:德国LZB 系统,日本新干线数字 ATC 系统(3)按照人机关系来分类,分为两种类型:① 设备优先控制的方式。
如:日本新干线 ATC 系统。
铁路信号与通信设备复习题
1.铁路信号的作用是指示列车运行及调车作业的命令,有关行车人员必须严格执行。
2.广义的铁路信号是指,在铁路运输系统中,用于保证行车安全,提高车站和区间通过能力,编组站解体编组作业能力的各种控制设备的总称。
3.狭义的铁路信号是指,地面和车上的各种信号机、表示器以及手信号灯旗等。
4.铁路信号分类:听觉信号和视觉信号5.铁路信号基本颜色:红色、黄色、绿色;辅助颜色:蓝色、月白色、透明白色、紫色。
6.要求停车的信号,如红色灯光、蓝色灯光,叫做禁止信号,又叫信号的关闭状态。
允许按规定速度运行的信号,如绿色灯光、黄色灯光、双黄灯光、白色灯光,叫做允许信号,又叫信号的开放状态。
7.信号机按用途分:进站、出站、通过、进路、接近、遮断、预告、驼峰、驼峰辅助、复示、调车。
8.进站信号机:设置在车站入口处,用于防护车站,指示列车进站条件,并能表示列车接车进路是否安全可靠。
9.出站信号机:设置在车站有发车作业的正线和到发线端部的适当地点,用于防护区间,其允许显示作为列车占用区间的凭证,指示列车能否由车站进入区间。
当显示禁止灯光时,指示进站列车在站内的停车位置。
10.四显示自动闭塞:双黄--准许列车按限定速度越过该信号机,经道岔侧向位置进入站内准备停车。
黄绿--准许列车由车站出发,表示运行前方有两个闭塞分区空闲。
11.进路表示器不能单独构成信号命令,只有在出站信号机开放后才能显示白色灯光表示开往方向。
12.色灯信号机按安装方式分为:高柱信号机和矮型信号机。
13.继电器是一种电磁开关,是实现自动控制和远程控制的重要设备。
14.继电器的作用:①表示功能:利用不同的继电器表示轨道区段的占用和空闲、信号机的开放和关闭、道岔是否在规定的位置、区间是否闭塞等。
②驱动功能:车站联锁设备的主要被控对象是信号机和转辙机,不论车站是采用继电联锁还是计算机联锁,均利用继电器控制相应的设备。
③逻辑功能:在继电联锁设备以及继电半自动闭塞设备中,利用继电电路实现有关逻辑关系,以保证车站和区间的行车、调车作业安全。
《动车组运行控制》第一次作业

《动车组运行控制》第一次作业1.列控系统的速度控制模式有哪些种类?对其进行分析对比。
答:列控系统从速度方面来看,可分为分级速度控制和目标距离速度控制。
(1)分级速度控制又分为阶梯式分级速度控制和分段曲线式分级速度控制。
1)阶梯式分级速度控制又分为超前速度控制方式和滞后速度控制方式;超前速度控制方式又称为入口速度检查方式,在闭塞分区入口检查控制列车是否超速;滞后速度控制方式有成为出口速度检查方式,控制系统在闭塞分区的出口检查列车的速度值,如果列车速度超过目标速度则设备进行自动制动;2)曲线式分级速度控制根据列车运行的速度分级,每一个闭塞分区给出一段速度控制曲线,对列车运行进行速度控制。
分级速度控制系统的列车追踪间隔主要与闭塞分区的划分、列车性能和速度有关,而闭塞分区的长度是以最坏性能的列车为依据并结合线路参数来确定的,所以不同速度列车混合运行的线路采用这种模式,起通过能力要受到较大的影响。
(2)目标距离速度控制采取的制动模式为连续式一次制动速度控制的方式,根据目标距离、目标速度及列车本身的性能确定列车制动曲线,不设定每个闭塞分区速度等级。
其是随路线参数和列车本身性能不同而变化的,空间间隔的长度是不固定的,比较适合用于各种不同性能和速度列车的混合运行,其追踪运行间隔比分级控制小,减速较平稳,舒适度要好。
2.以日本ATC系统为例,简述列控系统对列车速度进行控制的原理。
答:ATC系统即列车自动控制系统,是在列车自动停车基础上发展起来的装置,使列车按地面送来的允许行车速度信息行驶的技术和设备。
它设在机车上,大部分情况下,是装有专用程序的微型计算机及其相应的接口。
装有ATC 系统的列车,连续不断地从地面获得允许行车的速度信息,将它与列车实时采集的车速相比较,在超出规定允许的车速时,控制系统根据列车的制动能力、实际载重和前方区间坡道弯道条件等多种因素,求得最佳降速方案进行降速,或在需要时进行制动,以保证行车安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一:绘制列车限制速度曲线
实验报告
一.实验目标
已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:
●全线要求限速100公里每小时;
●试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:
1.全线速度不超过100公里每小时即27.78米每秒
2.在1366米之前列车需减速到0
二.实验过程
本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成
首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度,加速时间,则空走距离
之后列车视为做匀减速直线运动,减速度,初速度为,
末速度为0,则刹车距离
根据要求,有
其中是列车距防护点的距离,取最不利情况即
带入数据,根据①②③可得其防护速度与当前列车距防护点距离的关系式为
当时,
2.程序的编写
使用matlab进行编程,算法流程如下图:
限速计算函数:
function [ v ] = xiansu( sz,s,vt )
v=-19.2+0.5*sqrt(691.2+12*(sz-s)); if v> vt
v= vt;
end
if v<=0
v=0;
end
end
其中sz为防护点位置,s为当前列车位置,vt为列车限速,v为防护速度。
主函数
V=zeros(1,150001); %设置速度数组
S=0:0.01:1500; %设置距离数组
Vt=100/3.6; %设置最高限速
Sz=1366; %设置防护点距离
for k=1:150000 %计算防护速度
V(k)=xiansu(Sz,S(k),Vt);
end
Va=V*3.6; %速度转换为km/h
Sa=S/1000; %距离转换为km
plot(Sa,Va) %画图
grid on
xlabel('位置(km)')
ylabel('速度(km/h)')
title('列车速度防护曲线')
axis([0 1.5 0 120])
V=V*100; %速度转换为cm/s
S=S*100; %距离转换为cm
T = [S;V];
fileID = fopen('列车防护速度.txt','wt');
fprintf(fileID,'%.2f,%.2f\n',T);
fclose(fileID);
三.实验结果分析
利用matlab画出的图像如下图所示:
该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。