()开关磁阻电动机的换相基本理论与实践
对永磁无刷直流电机和开关磁阻电机的理解

对永磁无刷直流电机和开关磁阻电机的理解一、永磁无刷直流电动机(1)、简介直流电动机虽然起动和调速性能好,堵转转矩大,但是直流电动机具有电刷和换向器组成的机械换向装置,其间的滑动接触严重影响了电机的精度和可靠性,缩短电机寿命,需要经常维,产生的火花会引起无线电干扰,并且电刷换向装置又使直流电机变得结构复杂,工作噪声大。
在微电子技术、电力电子技术和电机控制技术日趋成熟的基础上,人们应用高性能永磁材料创造出了无接触式换向的直流电机,我们称之为永磁无刷直流电机。
(2)、基本结构永磁无刷直流电动机主要由永磁电动机本体、转子位置传感器和功率电子开关三部分组成。
直流电源通过电子开关向电动机定子绕组供电,由位置传感器检测电动机转子位置并发出电信号去控制功率电子开关的导通和关断,使电动机转动。
(3)、工作原理以下举一相导通星形三相三状态的例子说明。
一相导通星形三相三状态永磁无刷直流电动机三只光电位置传感器H1、H2、H3在空间对称均布,遮光圆盘与电机转子同轴安装,调整圆盘缺口与转子磁极的相对位置使缺口边沿位置与转子磁极的空间位置相对应。
缺口位置使光电传感器H1受光而输出高电平,功率开关管VT1导通,电流流入A相绕组,形成位于A相绕组轴线上的电枢磁动势Fa,Fa顺时针方向超前于转子磁动势Ff150°电角度。
Fa与Ff相互作用拖动转子顺时针旋转,当转子转过120°电角度时,与转子同轴安装的圆盘转到使光电传感器H2受光、H1遮光,功率开关管VT1关断、VT2导通,A相绕组断开,电流流入B相绕组,电流换相。
电枢磁动势变为Fb,Fb在顺时针方向继续领先转子磁势Ff150°电角度,两者相互作用,又驱动转子顺时针方向旋转。
当转子磁极转到240°时,电枢电流从B相换流到C相,产生的电磁转矩继续使电机转子旋转,直至重新回到起始位置,完成一个循环。
(4)、控制方法永磁无刷直流电动机的控制方法,按有无转子位置传感器,可分为有位置传感器控制和无位置传感器控制。
开关磁阻电机 控制
江苏大学硕士学位论文摘要开关磁阻电机是上世纪70年代发展起来的新型调速电机,具有结构简单坚固、起动性能好、成本低、容错性好、可四象限运行等突出优点。
ISAD(Integrated Starter Alternator Damper)系统是混合动力汽车中起动、助力、发电、阻尼多功能一体化的系统。
将开关磁阻电机应用于混合动力汽车ISAD系统,可提高汽车整车性能,降低汽车油耗和排放,具有很好的应用前景和研究价值。
本文以12/10结构开关磁阻电机在混合动力汽车ISAD系统中的应用为研究背景,重点研究了开关磁阻电机在起动、助力、发电状态的运行控制。
结合开关磁阻电机的数学模型,分析了开关磁阻电机在电动与发电状态下的运行特点。
根据ISAD系统的性能要求,分别提出了开关磁阻电机在起动、助力、发电三种工作模式下的控制方法。
在此基础上,构建了开关磁阻电机的ISAD系统实验平台,设计了开关磁阻电机的控制软件。
所设计的开关磁阻电机ISAD系统,通过对不同状态下反馈输入,判断运行状态并根据所在状态调节控制参数。
能够在一定负载下带载起动;在助力状态下以效率最优和转矩最优模式为发动机助力;在发电状态,能够为蓄电池提供恒流和恒压两种模式的闭环充电。
实验证明,研究的开关磁阻电机ISAD系统运行控制方法性能良好,具有很好的应用前景。
关键词:开关磁阻电机,ISAD,混合动力汽车,DSPI江苏大学硕士学位论文AΒSTRACTSwitched Reluctance Motor(SRM)is a novel drive machine developed since 1970s, with the inherent characteristics of simple and rugged construction, good start performance, low-cost, fault tolerant and four-quadrant operation capability,. Integrated Starter Alternator Damper (ISAD)is a system within Hybrid Electrical Vehicle (HEV), combining the starter, alternator, and Damper. The application of SRM in ISAD is prospective for .well performances of the whole HEV, lower oil consumption and emission.Focused on a 12/10 SRM applied in ISAD for HEV, the control scheme of SRM is studied. Considering the mathematical model of SRM, the characteristics of SRM in the motor and generator operation are analyzed . According to the performance requirement of ISAD, control strategies of SRM in starter, booster and Alternator modes are presented respectively. Then the SRM-based ISAD experimental platform is established, the control software is also designed. The designed system recognizes running mode with the current and voltage feedback, and then adjusts control parameters accordingly. When in starter mode, it starts with load to idle speed. When in boost mode, it boosts the engine with efficiency and torque optimum. When in alternator mode, it charges battery with current-constant mode or voltage-constant mode. The experimental results illuminates the performances of the designed ISAD system based on SRM and justify the presented control strategy.KEY WORDS: SRM , ISAD , HEV , DSPII江苏大学硕士学位论文目录第一章绪论 (1)1.1 ISAD系统简介 (1)1.2 开关磁阻电机的发展概况 (2)1.3 开关磁阻电机在ISAD系统上的应用 (3)1.4 课题研究背景及意义 (5)1.5 本文主要研究内容 (5)第二章开关磁阻电机的基本理论 (7)2.1 开关磁阻电机调速系统的基本组成 (7)2.2 开关磁阻电机的原理、基本结构与特点 (9)2.3 开关磁阻电机的数学模型 (11)2.3.1 开关磁阻电机的基本方程 (11)2.3.2 开关磁阻电机的线性模型 (13)2.3.3 开关磁阻电机的磁链特性 (14)2.3.4 开关磁阻电机的电流分析 (15)2.3.5 开关磁阻电机的机械特性 (17)2.4 开关磁阻电机的常用控制方式 (19)2.4.1 电流斩波控制(CCC)方式 (19)2.4.2 角度位置控制(APC)方式 (19)2.4.3 脉宽调制控制(PWM)方式 (20)2.5 开关磁阻电机的发电运行 (20)2.5.1 开关磁阻电机的功率平衡方程 (20)2.5.2 开关磁阻电机的发电运行分析 (21)2.6 小结 (22)第三章12/10结构开关磁阻电机调速系统硬件设计 (23)3.1 系统构成 (23)3.2 开关磁阻电机 (23)3.3 功率变换器 (24)3.3.1 功率变换器拓扑结构 (24)3.3.2 功率变换器具体设计 (25)3.4 控制器组成 (26)3.4.1 DSP控制器 (27)3.4.2 复杂可编程逻辑器件(CPLD)硬件控制电路 (28)3.4.3 外围比较电路 (30)3.5 反馈信号检测 (30)3.5.1 位置信号检测 (30)3.5.2 电流信号检测 (32)III江苏大学硕士学位论文3.5.3 电压信号检测 (33)3.6 小结 (33)第四章开关磁阻电机的控制策略及软件实现 (34)4.1 ISAD系统的控制要求 (34)4.2 开关磁阻电机ΙSAD调速系统的控制策略 (35)4.2.1 起动状态控制策略 (35)4.2.2 助力状态控制策略 (36)4.2.3 发电状态控制策略 (36)4.3 开关磁阻电机的控制问题 (37)4.3.1 转速计算功能的实现 (37)4.3.2 角度位置的准确定位 (38)4.3.3 换相逻辑的实现 (39)4.4 控制软件结构 (40)4.5 后台程序 (41)4.5.1 主程序 (41)4.5.2 初始化模块 (42)4.5.3 起动状态子程序 (43)4.5.4 助力状态子程序 (44)4.5.5 发电状态子程序 (44)4.6 前台中断 (45)4.6.1 捕获中断 (45)4.6.2 定时器1的中断 (46)4.6.3 其它中断 (47)4.7 小结 (47)第五章实验及数据分析 (48)5.1 实验系统 (48)5.2 起动实验 (50)5.3 助力实验 (51)5.3.1 助力状态导通角度优化实验 (51)5.3.2 助力性能分析 (55)5.4 发电运行开通角优化实验 (56)5.5 闭环发电实验 (58)5.6 缺相发电实验 (58)5.7 小结 (60)第六章全文总结与展望 (61)6.1 全文总结 (61)6.2 展望 (62)参考文献 (63)致谢 (68)IV江苏大学硕士学位论文第一章绪论1.1 ISAD系统简介混合动力汽车(Hybrid ElectricVehicle,简称HEV),是指同时装备汽车发动机和电动机两种动力源的新型车辆。
(整理)大工11春《微特电机及其控制》在线作业
大工11春《微特电机及其控制》在线作业1一、单选题(共 6 道试题,共30 分。
)1. 控制器ML4428的工作电压为()。
A. 3.3VB. 5VC. 12VD. 15V2. 从理论上来讲,无刷直流电动机气隙磁场的极弧宽度为()度电角度时,脉动转矩为0,输出转矩最大。
A. 60B. 90C. 120D. 1803. 无刷直流电动机主电路为星形连接三相桥式,采用二二导通方式,忽略换相影响,当梯形波反电动势的平顶宽度大于等于()度电角度时,转矩脉动为0。
A. 45B. 90C. 120D. 1504. 无刷直流电动机主电路为星形连接三相桥式,采用三三导通方式,则每个管子导通时间为()度电角度。
A. 90B. 120C. 150D. 1805. TMS320LF2407控制器具有3个()位通用定时/计数器。
A. 8B. 16C. 32D. 646. 在三次谐波检测法中,三次谐波分量的一个周期对应基波分量的()度电角度。
A. 45B. 60C. 90D. 120二、多选题(共7 道试题,共42 分。
)1. 无刷直流电动机常用的无位置传感器的位置检测方法有()。
A. 反电动势检测B. 续流二极管状态检测C. 三次谐波检测D. 瞬时电压方程检测2. 无刷直流电动机的特点包括()。
A. 无需考虑转子冷却问题B. 可在高速下工作C. 不必经常维护D. 电机结构简单3. 用微处理器取代模拟电路作为电机控制器的优点包括()。
A. 电路更加简单B. 提高控制灵活性C. 控制精度高D. 可提供人机界面4. 以下属于TMS320LF2407控制器的特点的是()。
A. 低功耗、高速度B. 工作电压为5VC. 地址总线为32位D. 单指令周期最短为25ns5. 以下属于无刷直流电动机的基本组成部分的是()。
A. 电动机本体B. 位置检测器C. 逆变器D. 互感器6. 无刷直流电动机控制系统设计的一般步骤包括()。
A. 了解电机特性,明确设计任务B. 硬件电路设计C. 控制软件设计D. 综合调试7. 造成无刷直流电动机转矩脉动的原因包括()。
开关磁阻电机发展概况
开关磁阻电机发展概况1 发展简介开关磁阻电机(Switched Reluctance Motor, SRM)最早可以追溯到1970年,英国Leeds大学步进电机研究小组首创一个开关磁阻电机雏形。
到1972年进一步对带半导体开关的小功率电动机(10w~1kw)进行了研究。
1975年有了实质性的进展,并一直发展到可以为50kw的电瓶汽车提供装置。
1980年在英国成立了开关磁阻电机驱动装置有限公司(SRD Ltd.),专门进行SRD系统的研究、开发和设计。
1983年英国(SRD Ltd.)首先推出了SRD系列产品,该产品命名为OULTON。
1984年TASC驱动系统公司也推出了他们的产品。
另外SRD Ltd. 研制了一种适用于有轨电车的驱动系统,到1986年已运行500km。
该产品的出现,在电气传动界引起不小的反响。
在很多性能指标上达到了出人意料的高水平,整个系统的综合性能价格指标达到或超过了工业中长期广泛应用的一些变速传动系统。
下表是当时对几种常用变速传动系统各项主要经济指标所作的比较。
成本 1.0 1.5 1.0美国、加拿大、南斯拉夫、埃及等国家也都开展了SRD系统的研制工作。
在国外的应用中,SRD一般用于牵引中,例如电瓶车和电动汽车。
同时高速性能是SRD的一个特长的方向。
据报道,美国为空间技术研制了一个25000r/min、90kW的高速SRD样机。
我国大约在1985年才开始对SRD系统进行研究。
SRD系统的研究已被列入我国中、小型电机“八五”、“九五”和“十五”科研规划项目。
华中科技大学开关磁阻电机课题组在“九五”项目中研制出使用SRD的纯电动轿车,在“十五”项目中将SRD应用到混合动力城市公交车,均取得了较好的运行效果。
纺织机械研究所将SRD应用于毛巾印花机、卷布机,煤矿牵引及电动车辆等,取得了显著的经济效益。
从上世纪90年代国际会议的上有关SRD系统的文章来看,对SRD系统的研究工作已经从论证它的优点、开发应用阶段进入到设计理论、优化设计研究阶段。
新能源汽车复习题
新能源汽车复习题一、选择题1.电动机的分类方法很多,下列不属于电动机分类方法的是()。
A、按工作电源分类B、按结构及工作原理分类C、按用途分类D、按电流大小分类2. 锂离子电池的不足体现在()。
A、成本高B、自放电率低C、无记忆性D、对环境无污染3.下列不属于电动汽车对动力电池要求的是()。
A、比能量高B、电压高C、循环寿命长D、比功率大4. 镍氢电池是将物质的化学反应产生的能量直接转化成电能的一种装置,镍氢电池由镍氢化合物正电极、储氢合金负电极以及()组成。
A、正极B、碱性电解液C、负极D、阴极5. 下列不属于电池性能指标的是()。
A、容量B、能量C、功率D、电容6. 开关磁阻电动机的运行原理遵循()。
A、主轴线不与磁场的轴线重合B、磁阻最小原理C、磁通总要沿着磁阻最大的路径闭合D、磁通最小原理7. 无刷直流电动机主要由电动机本体、电子换相器和()三部分组成。
A、电枢铁心B、电枢绕组C、转子位置传感器D、换向器8. 纯电动汽车的关键技术有,电动机及控制技术、电池及管理技术、整车控制技术和()。
A、整车轻量化技术B、整车性能化技术C、能量管理技术D、制动能量回收技术9. 根据增程器与汽车的安装关系,分为挂车式、插拔式和()三种。
A、组合式B、装配式C、便携式D、车载式10. 根据混合动力汽车零部件的种类、数量和连接关系,可将其分为串联式、并联式和()。
A、联合式B、复合式C、混联式D、他联式二、判断题(每小题2分,总20分)1. 锂离子电池由正极、负极、隔板、电解液、安全阀等组成。
(√)2. 能量密度也称体积比能量,是指电池单位质量所能输出的电能,单位是kgW/h 。
(×)3. 镍氢电池实际上不是“电池”,而是一个大的发电系统。
(×)4. 电动机的额定指标主要包括以下各项:额定功率、额定电压、额定电流、额定频率、额定转速。
(√)5. 电动汽车中的电动机比一般工业应用的电动机性能更高,电动机应具有瞬时功率大、带负载启动性能好、过载能力强,加速性能好,使用寿命长的特点。
开关磁阻电动机(1,2章)

i
2 m ax ut
LB
L
rt
其中:LB
Lmax
L
3
on
第28页
2、转矩计算: 瞬时相电流产生的电磁转矩。
Tem
1 i2 2
L
(电感不受电流大小的影响)
平均电磁转矩:
Tav
m1 T
T 1 i 2 L dt
0 2
第29页
第二节 准线性模型分析
准线性模型分析是将电机的磁特性曲线分段线性化。 1、电机的饱和磁特性及分段线性化
dt dt
dt i dt
“+”对应开关闭合; “-”对应于开关断开。
即: u
L
di dt
iR
ir
L
(电压平衡方程)
电源 自感 电阻 旋转电
电压 压降 压降 势压降
1、电流计算:
第25页
分段求解:
(1) 0 t t1
i u t (u L di
Lm in
dt
(2) t1 t t2 (R 0)
第35页
4)由式Tav可得: r u F / T
其中F为电机结构参数,m、θr、θ1、Lmax、Lmin及控制 参数θon、θoff的函数 ,表明SRM的固有机械特性与串励
直流电及相仿。
由准线性的分析过程可得
5)提高有效能量的方法。(增加W2)
_
a.加大电流ip,使 AB 线左移; _
b.加大磁链幅值使 BC 线上移;
Lm
ini
2 P
1 2
max LminiP
Lmax Lmin
2
V 2
2 r
off
1
1 on
Lm in
新能源汽车结构与原理复习题

新能源电动汽车结构与原理复习题1. 串联式混合动力电动汽车,内燃机仅与()相连,即只有电动机通过变速箱或直接作用于驱动轮的方式来驱动汽车。
A.起动机B.发电机C.电动水泵D.无级变速器2. 高压互锁系统在识别到危险时,整车控制器应根据危险时的行车状态及故障危险程度,合理运用的安全策略中不包括()。
A.切断低压源 B.切断高压源C.降功率运行D.故障报警3. 蓄电池在规定的放电终止电压下,放电电流(),电池的容量()。
A.越大,越大B.越小,越小C.越大,越小D. 越小,越大4. 用两节10Ah、2V的电池分别通过并联和串联组成电池组,两种电池组()。
A. 容量相同,能量相同 B. 容量不同,能量相同C. 容量相同,能量不同D. 容量不同,能量不同5. 改变逆变器输出的三相交流电的()就可以改变永磁同步电机的旋转方向。
A. 电压B. 电流C. 相序D. 频率6. 开关磁阻电动机的运行原理应遵循()。
A.主轴线不与磁场的轴线重合B.磁阻最小原理C.磁通总要沿着磁阻最大的路径闭合D.磁通最小原理7. 蓄电池的实际容量与以下()因素有关。
A. 结构与制造工艺B.放电速率C. 放电形式D. 终止电压与温度8. 具有记忆效应的动力电池是以下哪一种()。
A.镍氢蓄电池B.镍铬蓄电池C.镍锌蓄电池D. 锂离子蓄电池9. 最适合在频繁启动、停止、正反转换向运转等场景应用的电机是()。
A, 交流感应电机 B. 直流电机 C.永磁同步电机 D.开关磁阻电机10. 在纯电动汽车动力性要求中,国标对加速性能的要求是0-50km/h的加速时间不超过()A. 5sB. 10sC. 15sD. 20s11. 关于质子交换膜的说法不正确的是()A. 具有足够的机械强度和化学稳定性B.应有适度的含水率C. 膜表面与催化剂结合性要好D. 不允许H+ 通过12. 增压式燃料电池系统的氢气压力一般比空气压力高()MPaA. 0.02~0.05B. 0.1~0.2C. 0.2~0.3D. 0.3~0.513. 电动汽车控制器的最佳工作温度为()℃。
国内外特种电机种类和使用

国内外特种电机种类和使用国内外特种电机的种类及使用一、特种电机的概念:电机作为驱动的主要动力源,广泛应用于工业、农业、国防、公共设施、家用电器等各个领域。
特种电机指为了满足各类机械设备对其拖动电机性能要求的不同,而专门针对某一类型的机械设备特殊需要而单独设计、制造的特殊专用电机,国民经济的增长为特种电机行业的持续快速发展奠定了良好的基础。
二、特种电机的种类特种电机主要分为:新型旋转电机、直线电机、非电磁类电机三类。
1、新型旋转电机(1)永磁无刷电机:无刷电机的定义:一切具有直流电机外部特性的,采用电子换相的电机统称为“无刷电机”。
无刷电机的优点:1、无电刷、低干扰。
无刷电机去除了电刷,最直接的变化就是没有了有刷电机运转时产生的电火花,这样就极大减少了电火花对遥控无线电设备的干扰。
2、噪音低,运转顺畅。
无刷电机没有了电刷,运转时摩擦力大大减小,运行顺畅,噪音会低许多,这个优点对于模型运行稳定性是一个巨大的支持3、寿命长,低维护成本。
少了电1/ 6刷,无刷电机的磨损主要是在轴承上了,从机械角度看,无刷电机几乎是一种免维护的电动机了,必要的时候,只需做一些除尘维护即可。
(2)新型开关磁阻电机:开关磁阻电机是一种新型调速电机,调速系统兼具直流、交流两类调速系统的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无极调速系统。
它的结构简单坚固,调速范围宽,调速性能优异,且在整个调速范围内都具有较高效率,系统可靠性高。
它具有两个基本特征:(l)开关性——电机必须工作在一个连续的开关模式,这也是为什么在各种新型功率半导体器件可以获得后这种电机才得以发展的主要原因。
(2)磁阻性——定、转子具有可变磁阻回路,是真正的磁阻电机。
(3)磁悬浮电机:磁悬浮电动机是一种具有轴承支承功能的特殊电动机,它在运行时,不需要任何独立的轴承支承,因此具有无摩擦和磨损,无润滑油污染,寿命长等一系列优点。
(4)复式永磁电机:复式永磁同步电机将2个盘式电机的定子与外转子电机的定子构成一体,3个转子构成一个全封闭的筒形,将定子包围在其内部,它充分地利用了外转子式电机2个端面的空间。
开关磁阻电机的九大优势、三大缺点、应用领域全面解析
开关磁阻电机的九大优势、三大缺点、应用领域全面解析近年来,开关磁阻电机逐渐走进了市场,因为该电机具有其他电机没有的优势,所以逐渐成为了市场未来发展的主要方向,目前已成功地应用于电动车驱动、通用工业、家用电器和纺织机械等各个领域。
那么开关磁阻电机的优势到底是什么呢?让我们一起来了解一下吧!开关磁阻电机调速系统是以现代电力电子与微机控制技术为基础的机电一体化产品。
它是由开关磁阻电动机和微机智能控制器两部分组成,其特点是效率高、节能效果好、调速范围广,无冲击起动电流,起动转矩大,控制灵活等特点。
1998年,我国把发展电动机调速节能和电力电子节电技术纳入《中华人民共和国节能法》中,国家发改委“电动机节能计划”明确提出:提高电动机15-20%的效率,实现节电1000亿kWh/年。
因此,该种电机被广泛用于运输车辆驱动、龙门刨、锻压设备等需要重载起动,频繁启动,正反转的场合。
近几年,随着电机节能理念的逐渐深入,开关磁阻电机由于具有以下的特点,其正在应用于各种场合。
开关磁阻电机调速系统的特点:一、效率高,节能效果好。
经过测试,其整体效率比交流异步电动机变频调速系统至少高3%以上,低速下能提高至少10%,与直流调速、串级调速、电磁调速等比较,节电效果更明显。
二、起动转矩大,适合重载起动和负载变化明显且频繁启动的场合。
测试发现其启动转矩达额定转矩的150%时,起动电流仅为额定电流的30%,优势非常明显三、调速范围广。
开关磁阻电机可以在低速下长期运行,由于效率高,在低速下的温升程度比额定工况时要低,解决了变频调速电机低速运行时电动机发热问题,还可以根据实际灵活设置最高转速。
四、可频繁正、反转起动停止,系统调控性好,制动性好,能实现再生制动,节电效果显著。
五、起动电流小,避免对电网的冲击。
开关磁阻电机具有软启动特性,没有普通交流电动机起动电流大于5-7倍额定电流的现象。
六、功率因数高,不需增加无功补偿装置,测试发现,开关磁阻电机系统在空载和满载时的功率因数均大于0.98 。
新型开关磁阻电动机功率变换器的研究与设计
林 辉
( &RL brt y ot W s r o t hi l e , X n7 0 7 ,C ia S nG aq n Q og Ln 曰 aoao ,N r e e P le n a £ r h tn y c c i 0 2 hn) u unu i n i 。 1 R
C 2
。
}T 3、
( ) 双极性 电源 型 a
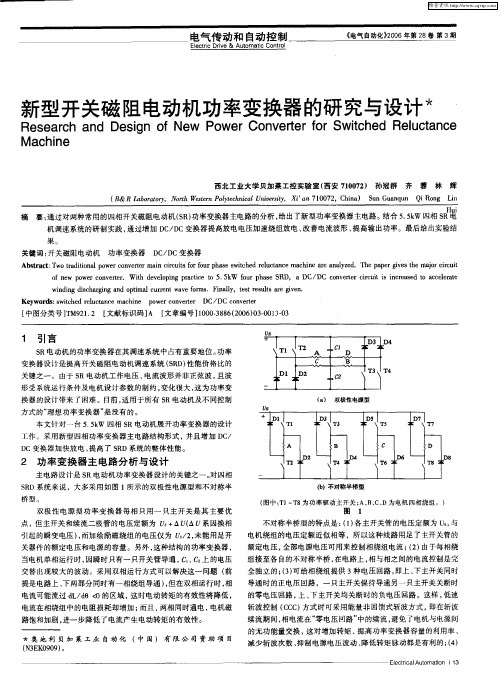
2 功率变换器主电路分析与设计
主 电路设计是 S R电动机功率变换器设计 的关键之一。 四相 对 S D系统来 说 ,大多采用如图 1 R 所示的双 极性 电源型和不对称半
桥型。
()不对称 半桥型 b
双极性 电源 型功率变换 器每相 只用一 只主开关是 其主要优
斩波控制 ( C ) C C 方式时可采用能量非回馈式斩波方式 , 即在斩波
当电机单相运行 时, 因瞬时只有一只开关管导通 , C 上的电压 C、 z
( 图中: 1 T 为功率驱动主开关 ; B C D为电机 四相绕组 。) T 一8 A、 、 、 图 1
点 ,但主开关 和续流二极管的电压定额为 +Au( aU系因换相
引起的瞬变 电压 )而加给励磁绕组的电压仅 为 / , , 2 未能用足开 关器件的额 定电压和 电源的容量。另外 , 这种结构的功率变换器 ,
摘 要: 通过对两种常用的 四相开关磁阻电动机 (R) s 功率变换器主电路的分析 , 给出了新 型功率变换器主电路。结合 5 5 W 四相 s 。k 机调速系统 的研制实践 , 通过增加 D / C变换器 提高放电 电压加速绕组放 电、 CD 改善 电流波形 、 高输 出功率。最后给出实验结 提
维普资讯
电气 传 动 和 自动控 制
E e ti i e& Au oma i n r j lc r Dr c v t t Co to c
五种新型电机简介
五种新型电机简介姓名:赵涛学号:1、超声波电机简介:原理:超声波电机就是利用超声波频率范围内的机械振动来获得动力源的装置,借助摩擦传递弹性超声波振动以获得动力。
超声波电机获得能量的超声波振动源又与压电陶瓷有着密切联系,当对压电陶瓷施加交变电压时,压电陶瓷本身或压电陶瓷和金属的混合体就会产生周期性地伸缩,即逆压电效应,通过这种伸缩,电机产生了动力。
人耳所能听到的的声音频率约为20Hz-20KHZ,而当频率超过20KHz以上,人耳便无法辨识,成为超声波。
对超声波电机的压电材料输入电压所产生的是晶体的形变,因此利用压电材料来带动转子,其前进的距离相当小,约是微米等级,因此若要此电机做长距离运动,就必须输入超声波的高频电压,使定子产生极高的振动频率才能得到合适的转速,这也正是超声波电机的由来。
特点: 1、超声波电机弹性振动体的振动速度和依靠摩擦传递能量的方式决定了它是一种低速电机,同时其能量密度是电磁电机的5到10倍左右,使得它不需要减速机构就能低速时获得大转矩,可直接带动执行机构。
2、超声波电机的构成不需要线圈与磁铁,本身不产生电磁波,所以外部磁场对其影响较小。
3、超声波电机断电时,定子与转子之间的静摩擦力使电机具有较大的静态保持力矩,从而实现自锁,省去了制动闸,简化了定位控制,其动态响应时间也较短。
4、超声波电机依靠定子的超声振动来驱动转子运动,超声振动的振幅一般在微米数量级,在直接反馈系统中,位置分辨率高,容易实现较高的定位控制精度。
应用:1、超声波电机可用于照相机的自动聚焦系统的驱动器;航空航天领域的自动驾驶仪伺服驱动器;机器人或微型器械自动控制系统的驱动器;高级轿车门窗和座椅靠头调节的驱动装置;窗帘或百叶窗自动启闭装置;2、医学领域的人造心脏驱动器、人工关节驱动器;强磁场环境下设备的驱动装置,如磁悬浮列车的控制系统;不希望驱动装置产生磁场的场合,如磁通门的自动测试转台等。
2、无刷直流电动机:原理:无刷永磁电动机伺服系统主要由4个部分组成:永磁同步电动机MS、转子位置检测器BQ、逆变器和控制器。
驱动电机及其控制技术
驱动电机及其控制技术驱动电机是电动汽车驱动系统的核心部件,其性能好坏直接影响电动汽车驱动系统的性能。
驱动电机一般有直流电机、交流电机、永磁电机和开关磁阻电机四种。
由于直流电机在电动车上的应用较少,主要介绍永磁同步电机、交流异步电机、开关磁阻电机三种电机及其控制技术。
一.永磁同步电机及其控制技术;永磁同步电机具有高效、高控制精度、高转矩密度、良好的转矩平稳性及低振动噪声的特点,通过合理设计永磁磁路结构能获得较高的弱磁性能。
它在电动汽车驱动方面具有很高的应用价值,受到国内外电动汽车界的高度重视,是最具竞争力的电动汽车驱动电机系统之一。
永磁同步电机分为正弦波驱动电流的永磁同步电机和方波驱动电流的永磁同步电机两种。
这里以三相正弦波驱动的永磁同步电机为例,阐述永磁同步电机的结构与特点。
永磁同步电机的结构和传统电机样,它主要由定子和转子两大部分构成。
定子与普通异步电机的定子基本相同,由电枢铁心和电枢绕组构成。
电枢铁心一般采用0.5mm硅钢冲片叠压而成,对于具有高效率指标或频率较高的电机,为了减少铁耗,可以考虑使用0.35mm的低损耗冷轧无取向硅钢片。
电枢绕组则普遍采用分布短距绕组;对于极数较多的电机,则普遍采用分数槽绕组;需要进一步改善电动势波形时,也可以考虑采用正弦绕组或其他特殊绕组。
转子主要由永磁体、转子铁心和转轴等构成。
其中永磁体主要采用铁氧体永磁和钕铁硼永磁材料;转子铁心可根据磁极结构的不同,选用实心钢,或采用钢板、硅钢片冲制后叠压而成。
与普通电机相比,永磁同步电机还必须装有转子永磁体位置检测器,用来检测磁极位置,并以此对电枢电流进行控制,达到对永磁同步电机驱动控制的目的。
根据永磁体在转子上位置的不同,永磁同步电机的磁极结构可分为表面式和内置式两种。
(1)表面式转子磁路结构:在表面式转子磁路结构中,永磁体通常呈瓦片形,并位于转子铁心的外表面上,永磁体提供磁通的方向为径向。
表面式结构又分为凸出式和嵌入式两种,对采用稀土永磁材料的电机来说,因为永磁材料的相对回复磁导率接近,所以表面凸出式转子在电磁性能上属于隐极转子结构;而嵌入式转子的相邻两永磁磁极间有着磁导率很大的铁磁材料,故在电磁性能上属于凸极转子结构。
电机原理及拖动 第4版 习题及答案(边春元) 第八章思考与习题解答
第八节思考题及答案.什么是特种电机?特种电机的分类?答:与传统直流电机、异步电机和同步电机相比,在工作原理、励磁方式、技术性能或功能及结构上有较大特点的电机统称为特种电机。
特种电机大致划分为如下几类:永磁电机、磁阻类电机、伺服电动机、直线电动机、信号检测与传感电机以及非传统电磁原理电机等。
1.永磁同步电动机与电励磁同步电动机在结构上有什么相似之处,又有什么不同之处?两者相比,永磁同步电动机有什么特点?答:永磁同步发电机与电励磁同步发电机在结构上的不同在于前者采用永磁体建立磁场,取消了励磁绕组、励磁电源、集电环和电刷等,结构简单、运行可靠。
假设采用稀土永磁,可以提高气隙磁密和功率密度,具有体积小、重量轻的优点。
但永磁同步发电机制成后,难以通过调节励磁磁场以控制输出电压,使其应用受到了限制。
2.永磁同步电动机径向式和切向式转子磁极结构各有什么优点?答:径向式结构:漏磁系数小、转轴上不需采取隔磁措施、转子冲片机械强度相对较高、安装永磁体后转子不易变形等。
切向式结构:在于一个极距下的磁通由相邻两个磁极并联提供,可得到更大的每极磁通。
尤其当电动机极数较多,而径向式结构又不能提供足够的每极磁通时,这种结构便具有明显的优势。
此外,这种转子结构的凸极效应明显,产生的磁阻转矩在电机总转矩中的比例可达40%,这对充分利用磁阻转矩,提高电动机功率密度和扩展电动机的恒功率运行范围都是有利的。
3.简述永磁无刷电动机的构成,其中位置传感器有哪几种?答:永磁无刷直流电动机由电动机本体、转子位置检测装置和功率驱动电路三局部组成。
常用的位置传感器主要有电磁式位置传感器、光电式位置传感器、磁敏式位置传感器,其中,磁敏式位置传感器种类有多种,如霍尔元件、磁敏晶体管以及磁敏电阻器等。
4.永磁无刷直流电动机为什么一定要有位置传感器或间接位置传感器?答:永磁无刷直流电机位置传感器的作用是为控制器提供当前转子磁极所处位置,控制器根据转子位置和电机转向来确定各功率管的导通状态。
开关磁阻电机发展概况
开关磁阻电机发展概况1 发展简介开关磁阻电机(Switched Reluctance Motor, SRM)最早可以追溯到1970年,英国Leeds大学步进电机研究小组首创一个开关磁阻电机雏形。
到1972年进一步对带半导体开关的小功率电动机(10w~1kw)进行了研究。
1975年有了实质性的进展,并一直发展到可以为50kw的电瓶汽车提供装置。
1980年在英国成立了开关磁阻电机驱动装置有限公司(SRD Ltd.),专门进行SRD系统的研究、开发和设计。
1983年英国(SRD Ltd.)首先推出了SRD系列产品,该产品命名为OULTON。
1984年TASC驱动系统公司也推出了他们的产品。
另外SRD Ltd. 研制了一种适用于有轨电车的驱动系统,到1986年已运行500km。
该产品的出现,在电气传动界引起不小的反响。
在很多性能指标上达到了出人意料的高水平,整个系统的综合性能价格指标达到或超过了工业中长期广泛应用的一些变速传动系统。
下表是当时对几种常用变速传动系统各项主要经济指标所作的比较。
成本 1.0 1.5 1.0美国、加拿大、南斯拉夫、埃及等国家也都开展了SRD系统的研制工作。
在国外的应用中,SRD一般用于牵引中,例如电瓶车和电动汽车。
同时高速性能是SRD的一个特长的方向。
据报道,美国为空间技术研制了一个25000r/min、90kW的高速SRD样机。
我国大约在1985年才开始对SRD系统进行研究。
SRD系统的研究已被列入我国中、小型电机“八五”、“九五”和“十五”科研规划项目。
华中科技大学开关磁阻电机课题组在“九五”项目中研制出使用SRD的纯电动轿车,在“十五”项目中将SRD应用到混合动力城市公交车,均取得了较好的运行效果。
纺织机械研究所将SRD应用于毛巾印花机、卷布机,煤矿牵引及电动车辆等,取得了显著的经济效益。
从上世纪90年代国际会议的上有关SRD系统的文章来看,对SRD系统的研究工作已经从论证它的优点、开发应用阶段进入到设计理论、优化设计研究阶段。
新能源汽车技术智慧树知到期末考试章节课后题库2024年潍坊学院、潍柴职业大学

新能源汽车技术智慧树知到期末考试答案章节题库2024年潍坊学院、潍柴职业大学1.与纯电动汽车相比,燃料电池汽车续驶里程增大2-4倍,能快速增加燃料。
()答案:对2.因飞轮电池采用竹纤维材料,直径不大,常使其作为电动汽车的辅助电源。
()答案:错3.恒流充电是指充电过程中使充电电流保持不变的方法。
()答案:对4.自适应控制系统是一个具有一定适应能力的系统,它能够认识环境条件的变化(如负荷变化,风、雨等气候条件的变化等)并自动校正控制动作,使系统达到最优或接近最优的控制效果。
()答案:对5.氢气的制氢过程属于车载烃类制氢过程。
()答案:错6.若两个磁通势方向相同,则称为差复励。
()答案:错7.如果储能器已经被完全充满,再生制动就不能实现,所需的制动力就只能由常规的制动系统提供。
()答案:对8.液压再生制动装置通常在工程机械或大型车辆上使用。
()答案:对9.增程式电动汽车是介于纯电动汽车和混合动力电动汽车之间的一种过渡车型,具有纯电动汽车和混合动力电动汽车的特征。
()答案:对10.定电流充电能够将蓄电池完全充足,有益于延长蓄电池的寿命。
()答案:对11.纯电动汽车是以电池为储能单元,以电动机为驱动系统的车辆。
()答案:对12.电枢调压控制是指通过改变电枢的端电压来控制电动机的转速。
()答案:对13.超级电容的内阻小,输出功率密度高,是一般蓄电池的数十倍。
()答案:对14.再生制动是指电动汽车在减速制动(刹车或者下坡)时将汽车的部分动能转化为电能,转化的电能储存在储存装置中,如各种蓄电池、超级电容和超高速飞轮,最终增加电动汽车的续驶里程。
()答案:对15.内置式转子结构可分为()。
答案:径向式###切向式###混合式16.纯电动汽车按照能源数量可分为:()。
答案:单能源###多能源17.混合电动汽车根据混合动力电动汽车零部件的种类、数量和连接关系,分为()混合动力电动汽车。
答案:并联式###串联式###混联式18.电动汽车充电装置组成()。
5.4 开关磁阻电动机控制技术
5.4.2 开关磁阻电机的控制方式
开关磁阻电动机控制系统的可控参数主要 有开通角、关断角、相电流幅值以及相绕组端电 压;对这些参数进行单独控制或组合控制就能得 到不同的控制方法,常用的控制方法有角度控制 (APC)、电流斩波控制(CCC)和电压控制 (VC)三种。
5.4.2 开关磁阻电机的控制方式
5.4 开关磁阻电动机 控制技术
开关磁阻电动机调速系统SRD(Switched Reluctance Drive)是继变频调速系统、无换 向器电动机调速系统之后发展起来的最新一代 交流无级调速系统。它具有结构简单、坚固、 成本低、工作可靠、控制灵活、运行效率高等 诸多优点,由其构成的传动系统具有交、直流 传动系统所没有的优点。
APC方式
T C
T C
T2 C
O
n1
n2
5.4.3 开关磁阻电动机的机械特性
在恒转矩区,由于转速较低,电动机的感应电动势较小,因此 需要对电流进行斩波限幅,采用电流斩波控制(CCC)方式,或采 用相电压脉宽调制。
在恒功率区,由于相感应电动势较大,相电流赋值受限,可以 通过调节恒功率区开关器件的触发角和关断角得到恒功率特性,采 用角度位置控制(APC)方式。
5.4.1 控制系统的结构组成
VT1
VT3
VT5
VD1
US
+
A
CS
VD3 B
VD5 C
VT2 VD2
VT4 VD4
VD6 VT6
5.4.1 控制系统的结构组成
该电路利用两个功率器件(如A相为VT1和 VT2)和两个续流二极管(A相VD1和VD2)分 别控制相电流,并实现能量回馈功能。由于这种 电路的拓扑结构每相需要两个功率器件,因此该 变换器的成本相对高于一个功率器件的变换器, 但是可以单独控制每相绕组,而且不受其他相绕 组状态的影响。因此可以采用相重叠,使转矩增 加,并且恒功率调速范围变宽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第28卷第4期1996年8月南 京 航 空 航 天 大 学 学 报Jo ur nal o f Nanjing Univ ersity o f Aeronautics&Astro nauticsV o l.28N o.4 Aug.1996开关磁阻电动机的换相基本理论与实践陈 昊 樊小明 朱学忠(南京航空航天大学自动控制系 南京,210016)摘要 介绍了开关磁阻电动机的换相原理,提出了衡量其换相性能的指标,并与其它类型电动机的换相机理做了对比。
根据对常规四相8/6结构方案、三相6/4结构PW M方案和四相五管制调压调速方案的实践,分析了影响其换相性能的主要控制参数和运行参数,表明关断角θ2是影响换相性能的主要控制参数,并以最大电磁功率为准则,给出了四相8/6结构和三相6/4结构的θ2优选范围,且其低速、轻载运行时,比高速、重载运行时的换相性能要好。
关键词:功率变换器;磁阻;开关磁阻电动机;开关电路;调速电动机;电机控制中图分类号:TM301.2引 言开关磁阻调速电动机(简称SRD)的各相绕组要保持有一定相序和通断时刻的相电流,需要由输出周期性脉冲电流的变换器来实现。
由于电机(SRM)转子是反应式结构,故只需单极性供电。
单极性输出的变换器的相电流没有自然过零点,因此必须适时关断主开关强迫换相,同时还要优化控制参数,防止电机换相续流时间过长而形成的制动转矩,影响系统的效率与出力[1,2]。
1 换相机理1.1 换相原理 m相SRD的相电感L(θ)以转子齿距角θr=2π/Z r(1)为周期而变化(见图1),其中,Z r为转子齿极数,且各相之间依次相差T p=θr/m(2)航空科学基金资助项目。
收稿日期:1995-10-16;修改稿收到日期:1996-01-09第一作者 陈 昊 男,博士后,1969年6月生。
通过控制功率变换器各相主开关分别在各自θ=θ1(开通角)时刻触发导通,在θ=θ2(关断角)时刻关断,在θ=θ3(换相角)时刻完成续流换相,即θ1≤θ<θ2区域,电源U s对相绕组供电;θ2≤θ≤θ3区域,换相电压U c反加于相绕组两端,强迫其换相,忽略相间互感,有电压方程U AU BU m=R A+j Ai AD0 0R B+j Bi B D00… 0R m+j mi mDi Ai Bi m+K θj A0j B0j m(3)图1 相电感及相电流示意图其中D表示时间微商记号,即Di=d id t;第k相磁链和电阻分别是j k,R k;电机运行角速度为K=dθ/d t;且供电阶段U k=U s,(k=A,B,…,m)。
一般,由于换相电压U c反向施于相绕组,强迫相电流衰减,实现换相,则换相时,有电压方程-U c=R k i k+j ki kd i kd t+Kj kθ(4) 从能量角度看,换相时,就要强迫释放电机磁场储能。
忽略铁心损耗及互感影响,以一相通电为例,根据能量守恒定律,有-d W m=R k i2k d t+U c i k d t+T em K d t(5)即d t时间内磁场释放的磁能(-d W m),一部分消耗在电阻R k上(定子铜耗,右边第一项),一部分转化为电能回馈给电源(或电容)(右边第二项),尚有一部分转化为有用机械能(右边第三项)。
而电磁转矩T em=-W mθj=c(6)若在θm~θr区域内有续流电流存在时,T em<0,电机进入再生运行阶段。
SRD就是通过对相绕组施加换相电压,强迫释放电机磁场储能,让换相的相电流迅速衰竭,从而减少制动转矩分量,实现有效换相,使系统得到充分利用。
1.2 换相性能指标(a)换相裕度V SRD换相的相电流必须在一个θr内截止,这样,下一个周期到来时,主开关可实现零电流开通,开关应力小。
换相裕度定义为V=1-(θ3-θ1)/θr(7)它反映了确保实现零电流开通的角度余量。
(b)制动转矩相对值T*b 在0~θm区域,相电流产生电动转矩;在θm~θr区域,相电流产生制动转矩。
两者在一个θr内的平均值分别是T p和T b,则平均输出转矩为T av=T p-T b(8)493第4期陈 昊等:开关磁阻电动机的换相基本理论与实践则制动转矩相对值定义为T *b =T b /T av(9)它表示了SRD 的实际利用程度。
换相快,续流时间短,则负转矩小。
理想情况下,T *b 的最小值为0。
此外,SRD 的输出功率P 2和效率Z 也可以与V ,T *b 一起用来衡量其换相性能。
1.3 不同类型电机的比较SRD 可以说是带有位置闭环控制大步距角步进电动机的延拓。
一般步进电动机作为信息传输,实现角位移精密传动。
作为功率型电气传动装置,SRD 要突出转速控制和实现高效率运行,因此,对换相性能的要求远高于步进电动机。
反应式同步电动机也是利用无励磁转子的凸极效应传递功率的,但它的定子与常规多相交流电机的相同,接通交流电后产生旋转磁场,相电流有自然过零,可望自然换相。
自整步同步电动机,即无换向器直流电动机的定子由逆变器供多相交流电,在高速运行时,可利用电动机反电势关断原导通开关,实现换相;在低速时,采用断流法实现换相。
直流电动机是采用机械换向(相),必要时可辅以换向极实现反电势换向(相)。
可见,与其它电动机相比,SRD 具有特殊的工作机理,其换相策略也颇具特色。
2 典型换相策略分析常见的SRD 有四相8/6结构和三相6/4结构。
由于采用不同的变换器拓扑结构和控制方案,其换相策略也就不同。
本文选取几例典型方案,做有关分析。
2.1 常规四相8/6结构方案目前广泛应用的四相8/6结构SRD 主电路如图2(a )所示。
两电容C 1和C 2分压构成中点电位,同时起到续流贮能和强迫换相功能,并兼作交流整流的滤波电容。
A ,C 相换相电压是U 0;B ,D 相换相电压等于(U D -U 0)。
图2(b )给出了某样机工作时的相电流实际波形(U D =146V,n =2060r /min)。
(本文定义转子槽轴线与定子齿极轴线重合的位置为θ=0°。
)图2 常规四相8/6结构方案2.2 三相6/4结构PW M 方案图3(a )所示为三相6/4结构双开关主电路。
它每相采用两只主开关,供电时,对相触发信号施加PW M 信号,通过调节占空比D ,实现调速控制;换相时,两只主开关关断(以A 相为例,S 1和S 4关断),相电流将经两只续流二极管(VD 4,V D 1)续流,将磁能转变为电能回馈,直至续流电流截止,由于494南 京 航 空 航 天 大 学 学 报第28卷电源电压U D 全部反向加于续流电路,即U C =U D ,所以可使换相相强迫续流,可靠换相。
某三相样机的相电流实际波形(U D =270V ,n =1500r /min ,T em =14.2N ·m ),见图3(b )所示。
图3 三相6/4结构PW M 方案2.3 四相五管制调压调速方案图4(a )为四相五管制调压调速SRD 主电路。
PW M 信号施加在斩波管V 上,通过调节占空比D ,实现调压调速。
变换器四相主开关采用优化的固定通断角触发,导通1/2周期,系统以DA →AB →BC →CD →DA 的双四拍工作制循序运行。
采用此方案的某样机的相电流实际波形(U D =250V ,n=1500r /m in ,T em =1.7N ·m )见图4(b )所示。
该方案换相时,换相相的磁能直接向其它相转移,引起中点电位U 0的浮动。
以A 相为例,进入第3拍(BC 导通)时:(1)若V 导通,由于A 相开始续流,C 相导通,使U 0上浮,换相电压U C =U 0升高,加速了A 相续流电流的衰减;(2)若V 关断,V D 导通,U 0下浮,则U C 减小,不利于A 相电流的衰减。
进入第4拍(CD 导通)时:(1)若V 导通,由于B 相开始续流,D 相导通,使U 0下浮;特别是(2)V 关断,VD 导通时,U 0进一步下浮,出现U 0<0,即U C <0,这有背于换相时串加反电压实现强迫换相;此时,若A 相电流未截止,则会引起A 相电流上升,难以实现可靠换相。
因此,须优选控制参数,使续流电流在第3拍内就截止。
图4 四相五管制调压调速方案上述方案中,均采用贮能元件(L,C)存贮和转移因换相而回馈的能量。
此外,也可采用电阻换相方案[3],使换相回馈的能量,一部分消耗在耗能元件(电阻)上,但因回馈的能量没有有效地回收,系统的效率不高,因此一般应用在微电机系统中。
3 影响换相性能的主要因素分析S RD 是由双凸极磁阻电机(SRM )、功率变换电路及控制调节单元组成的调速电动机系统,不同的S RM 结构参数,以及不同的功率变换电路方案,其换相性能就有所差异。
本文495第4期陈 昊等:开关磁阻电动机的换相基本理论与实践将着重分析控制参数和运行参数对换相性能的影响。
3.1 关断角θ2的影响θ2可以控制相电流的大小和波形,θ2过大,则续流电流大,换相过程长,延伸至电感下降区的续流电流,产生较大的制动转矩;θ2过小,则相电流过早截止,电机过早换相,出力小。
因此,关断角θ2是影响S RD 换相性能的主要控制参数。
根据计算结果,以最大电磁功率即电机有效利用程度为准则(如图5所示)得:(a )22(°)~24(°)是四相8/6结构SRD 的θ2优选范围;(b )36(°)~38(°)是三相6/4结构S RD 的θ2优选范围。
图5 θ2优选依据3.2 运行参数的影响作为调速电动机系统,SRD 具有一定的调速范围,同时还要求有一定的过速和过载能力。
然而,在不同的运行参数n (转速)和T em (电磁转矩)下,其换相性能亦不相同(见表1,2)。
(1)转速n 的影响表1以某四相五管制方案SR D 样机为例,保持电磁转矩恒定,计算了三种运行转速下的换相性能。
由于随转速n 的升高,需增加相绕组供电电压,以建立合适的相电流,满足输出的需要;而相电流的时间周期T =θr /Ψ变短,续流延长,(θ3-θ1)增加,则换相裕度γ减小,且制动转矩分量T *b 增加。
496南 京 航 空 航 天 大 学 学 报第28卷表1 转速n 对换相性能的影响n /r ·min -1D (%)I ph /A i max /A γ(%)T *b (%)50030.0 1.69 3.3528.261.38150064.0 1.76 3.5724.571.842300100.01.683.0521.302.42 注:U D =250V ,T em = 1.7N ·m ,PW M 频率f =3k Hz 。
(2)电磁转矩T em 的影响表2 电磁转矩T em 对换相性能的影响T em /N ·m D (%)I ph /A i max /A γ(%)T *b (%)0.530.00.82 1.8224.571.061.764.0 1.76 3.5724.571.845.0100.03.325.4615.872.29 注:U D =250V ,n =1500r /min ,PW M 频率f =3k Hz 。