直流电机模糊控制系统的MATLAB-Simulink仿真研究毕业设计
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
模糊控制实例及simulink仿真实验报告
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
基于Matlabsimlink的模糊PID双闭环直流电机调速

速系统比仅仅使用PI双闭环系统的控制性 能指标有了一定的优化。
3、结论
本文通过对直流调速系统的开环、双 闭环以及模糊PI控制器的双闭环系统进行 了仿真,验证了不同控制系统对于直流电 机调速的控制效果。开环系统冲击电流大, 机械特性差,双闭环控制系统较开环系统 具有明显的硬度,机械特性不易受干扰。采 用带自调整因子的模糊Pl控制器减小了系 统初始的冲击电流,并且响应速度有r明 显的改善,这在工业生产和电力系统自动 控制中具有微高的实用价值。
低于给定转速时,转速调节器的输出增加,
即电流给定上升,并通过电流环调节使电
动机电流增加,从而使电动机获得加速转
矩,电动机转速上升,并通过电流环调节使}
电动机电流下降,电动机将因为电磁转矩
减小而减速。在当转速调节器饱和输出达
到限幅值时,电流环即以最大电流限制实
现电动机的加速,使电动机的启动时间最
短,转速、电流双闭环直流凋速系统的仿真
开环直流调速由于自身的缺点几乎不 能满足生产过程的要求,在应J丰{广泛的双闭 环直流调速系统中,传统PID控制已经得 到了比较成熟的应用。但是受电动机负载 等非线性因素的影响,传统的控制策略在实 际应用中难以保持i殳计时的性能。随着模 糊控制技术应用的日渐成熟,又由于模糊 控制不依赖于被控对象的精确数学模型,能 够克服非线性因素的影响,对调节对象的参 数变化具有较强的鲁棒性,所以将模糊控 制与传统的PID控制结合可以起flltE好的 效果。模糊控制系统中,在当对象参数、 给定或扰动变化过大时,很难获得满意的 控制效果,在此基础提出自调整因子0t.模 糊控制器,根据控制的误差值,通过适当 的调节规则来调整一些关键控制参数值,
基于MATLAB的无刷直流电机模糊控制仿真研究

基于MATLAB的无刷直流电机模糊控制仿真研究发表时间:2008-12-10T10:10:32.153Z 来源:《黑龙江科技信息》供稿作者:杨新军[导读] 摘要:无传感无刷直流电机(SLBLDCM)是一个多变量、非线性系统,PID控制在其调速系统中得到广泛应用。
本文将模糊PID控制应用到SLBLDCM控制系统中,首先建立了无刷直流电机的数学模型,然后利用MATLAB中的Fuzzy Toolbox和Simulink完成了该电机模糊PID双闭环调速系统的仿真设计。
仿真结果表明:控制系统运行平稳,速度跟踪快速准确,同时又具有较高的控制精度。
关键词:无刷直流电机;MATLAB;模糊控制摘要:无传感无刷直流电机(SLBLDCM)是一个多变量、非线性系统,PID控制在其调速系统中得到广泛应用。
本文将模糊PID控制应用到SLBLDCM控制系统中,首先建立了无刷直流电机的数学模型,然后利用MATLAB中的Fuzzy Toolbox和Simulink完成了该电机模糊PID双闭环调速系统的仿真设计。
仿真结果表明:控制系统运行平稳,速度跟踪快速准确,同时又具有较高的控制精度。
关键词:无刷直流电机;MATLAB;模糊控制引言无刷直流电机(BRUSHLESS DC MOTOR,以下简称BLDCM)以其体积小、重量轻、效率高、惯量小和控制精度高等优点,同时还保留了普通直流电动机优良的机械特性,广泛应用于伺服控制、数控机床、机器人等领域[1]。
在分析无刷直流电机数学模型的基础上,建立控制系统的计算机仿真模型,将模糊PID控制应用于BLDCM。
1 无刷直流电机的数学模型无刷直流电机控制系统采用电子换向器(逆变器)替代直流电动机的机械换向器,实现直流到交流的逆变,采用位置传感器控制绕组电流的切换控制[2],图1为通常采用的无刷直流电机的等效电路图。
为简化分析,假设:1.1定子绕组为60°相带整距绕组,星形连接。
1.2不考虑齿槽效应。
MATLAB设计模糊控制器并用simulink仿真
MATLAB设计模糊控制器并用simulink仿真
环境:MATLAB R2012a
目录
一、设计模糊控制器
1.1 创建项目文件夹
1.2 打开MATLAB
1.3 设计模糊控制器
二、设置控制系统
三、simulink仿真
一、设计模糊控制器
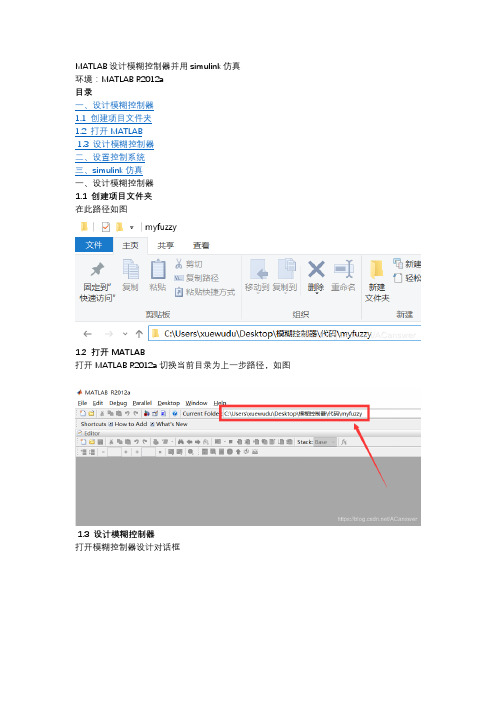
1.1 创建项目文件夹
在此路径如图
1.2 打开MATLAB
打开MATLAB R2012a切换当前目录为上一步路径,如图
1.3 设计模糊控制器
打开模糊控制器设计对话框
根据模糊控制器的输入输出设计模糊控制器,在此以二输入一输出为例。
完成后如图(左)所示,然后对每个输入输出变量设置隶属函数,如图(右)。
添加论域数量
设置隶属函数
完成后如图所示
设计模糊规则
保存刚刚设计的模糊控制器,如下图所示
加载模糊控制器到MATLAB中
二、设置控制系统
打开simulink仿真器
设计控制系统
设计完成如图所示
添加第一节中设计的模糊控制器,如下图
自此控制系统设计结束
三、simulink仿真
在仿真之前需要进行如下设置
开始仿真。
基于SIMULINK无刷直流电机模糊PID控制的建模与仿真
i n s t r u c t i v e t o a c t u al l y b r u s hl e s s DC mo t or s p e e d c on t r ol s y s t em d e s i g n . Ke y wo r ds :B r u s h l e s s DC Mo t o r ; Dou b l e — l o o p Con t r ol ; F u z z y PI D Co n t r o l
a i mi n g a t t h e t y p i c al t wo - - ph a s e c o n du c t i o n s t ar t hr e e - - ph a s e s i x wor k s o f br u s hl es s DC
统的 P I D控 制 方法相 比有 更好 的稳 定性和抗干扰性 。
变量 、强耦合 、非线性的复杂系统 …,
因此 传统 P I D 控 制 器 难 以 获 得 满 意
态 响应 等 优 点 ,基 于无 刷 直 流 电机 具有一系列优点 ,已在交通 、工业、 家 电、航空航天、军工、伺服控制等 领域 都 被 广 泛地 使 用 ,因此 对其 控 制 方 式的研 究可 以更 广 泛的 挖掘 其
基于MATLAB_SIMULINK的直流电机模糊控制的仿真
理论与设计基于MATLAB/SIMULINK的直流电机模糊控制的仿真周小波 王群京 陈 伟 周嗣理安徽大学(230039)Fuzzy Control Simulation for Dc Motor Based on MATLAB/SIMULINKZhou Xiaobo Wang Qunjing Chen Wei Zhou SiliAnhui University双闭环调速系统[2]。
摘 要:介绍了直流电机的双闭环调速原理,并用M A T L A B构建了直流电机转速、电流双闭环调速系统的模型。
转速环采用模糊控制器,与传统的P I调节器进行比较,模糊控制器具有更好的控制性能。
关键词:双闭环 模糊控制 直流电机SIMULINKAbstract: The principle of double-closed-loop speedregulation system for dc motors was introduced and modelof it was established by means of MATLAB. The speed loop employed the fuzzy logical control. Compared with the traditional PI control, the fuzzy logical controller had better performance.Keywords:Dual-closed-loop Fussy logical controller DC motor由于直流电机系统本身的非线性,当被控对象特性发生变化时,P I调节器难以保持良好的控制性能。
因此本文设计了基于模糊自调节的P I控制器,根据专家的在线调整,以M A T L A B/ S I M U L I N K为工具箱,建立直流电机的常规控制和模糊控制的仿真模型。
1 双闭环调速系统1.1 双闭环调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中分别设置两个调节器以调节转速和电流。
无刷直流电机模糊pid控制器的simulink设计

无刷直流电机模糊pid控制器的simulink设计在控制系统中,PID控制器是最常见且广泛应用的控制器之一,它通过调节比例项、积分项和微分项来实现对系统的控制。
而模糊控制器则是一种基于模糊逻辑的控制器,能够处理系统模型非线性、参数变化较大或难以精确建模的情况。
将PID控制器与模糊控制器相结合,可以充分发挥各自的优势,提高系统的控制性能。
在Simulink中设计无刷直流电机模糊PID控制器,首先需要建立电机模型。
电机模型可以通过数学建模或直接使用Simulink中的电机模型来实现。
接下来,需要设计PID控制器和模糊控制器。
PID控制器的参数可以通过经验法则、试错法或自整定法等方法进行调节,以获得合适的控制效果。
模糊控制器的设计需要确定模糊集合、模糊规则库和模糊推理方法,以实现对系统的模糊控制。
设计无刷直流电机模糊PID控制器的Simulink模型时,可以按照以下步骤进行:1. 建立电机模型:选择合适的直流电机模型,包括电机的电气特性、机械特性和控制接口等。
2. 设计PID控制器:设置PID控制器的比例、积分和微分参数,通过模拟和调节,使得系统的响应速度、稳定性和抗干扰能力达到要求。
3. 设计模糊控制器:确定模糊控制器的模糊集合、模糊规则库和模糊推理方法,设置模糊控制器的输入输出变量和模糊规则。
4. 整合PID控制器和模糊控制器:将PID控制器和模糊控制器串联或并联,根据系统的要求和性能指标来设计控制器的整体结构。
5. 仿真验证:在Simulink中进行仿真验证,通过模拟系统的运行情况和控制效果,来评估控制器的性能和稳定性。
通过以上步骤的设计和仿真验证,可以得到一个合理、有效的无刷直流电机模糊PID控制器的Simulink模型。
在实际应用中,可以根据系统的实际情况和性能要求,进一步优化控制器的参数和结构,以实现更好的控制效果。
同时,不断的实验和调试,能够进一步提高控制器的稳定性和鲁棒性,确保系统的可靠性和性能的提升。
直流调速系统模糊控制建模与仿真毕设资料
论文独创性声明本人所呈交的论文,是在指导教师的指导下,独立进行研究和开发工作所取得的成果。
除文中已特别加以注明引用的内容外,论文中不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的工作做出重要贡献的个人和集体,均已在文中以明确方式标明并致谢。
本人完全意识到本声明的法律结果由本人承担。
特此声明。
论文作者(签名):年月日摘要本文设计目的是建立一个模糊控制器控制的直流电机调速系统。
其内容包括直流电动机结构和工作原理的分析,直流调速系统的结构分析,传统控制方案的优缺点分析,直流调速系统和模糊控制器的模型的建立,模糊控制器的设计和Simulink工具箱的使用,并分别在PID控制和模糊控制下对直流调速系统仿真模型的输出结果进行分析,然后同传统的控制方案比较,得出结论。
方法是在MATLAB中分别建立直流电机和直流调速器系统的仿真图,设置好系统中各模块对应的最优参数,先在直流调速系统用传统的PID控制器得到进行仿真,得到相应的动态、稳态指标及抗扰动能力等相关数据。
再把直流电机调速的实际情况转换为模糊规则,利用这些规则进行模糊推理和模糊决策得到控制量,设置各部分参数,建立模糊控制器,然后将直流调速系统的PID控制器用模糊控制器代替,建立模糊控制策略,并保持原先系统各部分参数不变,查看输出波形,记录数据,对比分析各项指标。
研究表明,直流调速模糊控制系统具有构造简单,结果准确,调节方便,响应迅速及抗扰能力强等优点。
关键词:模糊控制;Simulink;直流调速系统;PID控制AbstractThe purpose of this paper is to establish a fuzzy controller to control the DC motor speed control system. The contents include DC motor structure and working principle of the analysis, structure analysis of DC speed control system, analysis of the advantages and disadvantages of the traditional control scheme, the establishment of the model of DC speed control system and fuzzy controller, fuzzy controller design and Simulink toolbox is used, and in the PID control and fuzzy control of DC speed control system simulation model of the output results and with the traditional control scheme, we can draw the conclusion that. Method in MATLAB are established simulation diagram of DC motor and DC speed regulator system, system of each module corresponds to the optimal parameter settings, first in DC speed regulating system with the traditional PID controller by simulation, the corresponding dynamic and steady-state performance and anti-disturbance kinetic energy force related data. The fuzzy rule, using the rules for fuzzy reasoning and fuzzy decision-making to get control of the actual situation of the DC motor speed conversion, set the parameters, a fuzzy controller is established, and then the DC speed control system PID controller is replaced by fuzzy controller, each part of the cascade system and maintain the original parameters unchanged, view the output waveform, recording data, comparative analysis the indicators. The research shows that the DC speed regulating fuzzy control system has the advantages of simple structure, accurate result, convenient adjustment, quick response and so on.Key words: Fuzzy control; Simulink; DC speed control system; PID control目录摘要 (I)ABSTRACT ................................................................... I I 1绪论.. (1)1.1论文的背景及意义 (1)1.2国内研究现状及展望 (1)1.3论文的主要内容 (3)2直流调速系统设计 (4)2.1直流电动机的基本结构和工作原理. (4)2.2直流调速系统总体方案设计 (6)2.2.1直流电动机调速方式的选择 (6)2.2.2单闭环直流调速系统的搭建 (8)2.2.3直流调速系统数学模型的建立 (9)2.2.4 控制器的类型 (12)3 模糊控制系统研究 (14)3.1模糊控制概述 (14)3.2模糊控制设计 (15)3.2.1模糊控制系统的核心设计 (15)3.2.2模糊控制系统的总体设计 (16)3.3模糊控制与PID控制比较 (17)4系统仿真 (18)4.1MATLAB编程环境及S IMULINK组件介绍 (18)4.2直流电机PID控制系统的建立与仿真 (19)4.3模糊控制器算法设计 (24)4.3.1选取模糊控制器 (24)4.3.2建立模糊规则表 (27)4.3.3模糊推理 (28)4.4直流电机模糊控制系统的建立与仿真 (28)4.5模糊-PID复合控制 (30)4.6扰动参与的系统仿真 (31)4.7仿真结果及分析 (32)4.7.1动态、稳态指标分析 (32)4.7.2抗扰动能力分析 (33)5 总结与展望 (35)致谢 (36)参考文献 (37)1绪论1.1论文的背景及意义在工农业生产和日常生活中,直流电机的使用非常广泛,是一种经常被用作为控制元件来使用的器件[1]。
基于MATLAB/SIMULINK直流电机调速系统模糊控制的建模与仿真

式 中 :T =L/ 为 电 枢 回 路 电 磁 时 问 ; R
E=Cn为额 定励 磁下 电 动机 的反电动 势 ; , 在零 初 始条件 下对 ( )式进 行拉 氏变换 得 1
GD。 2 4 =2 . 5;CⅣ一 3 / o PI*e
固定转 矩 为 6 。 7 3 1 电机 模 型 的 实现 .
( ) 电机 数 学模 型 1 额 定励直 流 电机 电枢 回路 电压 平衡 方程式 为 :
U d 。一 E — RI d十 I ,
围 3 直流电机仿真模型
标 器 在 模 型 窗 口上 “ ”出所 需 的控 画
直 流 电机模 糊控制 系统结 构 图如图 1所示 。
图 1 模 糊 控 制 直 流 电 机 系 统框 图
由 图 1可 见 , 机 直 流 调 速 系 统 的 过 程 为 : 测 速 电 由
发 电机输 出 电压 中取 出转速负 反馈 电压 ,与给定 电压 进 行 比较 得 到 的偏 差和 偏 差变 化率 送 给模 糊 控 制 器。 由模 糊控 能 器计算 出 电机控 制量 ,送给 电机 ,实 现 电
2 SMU I K 下直流 调速 系统仿真 模型 的实现 I LN
计算 机仿 真技 术是 应用 电子 计算机 对研究 对象 的 数 学模 型进 行计 算 和分析 的方 法 。对 于从 事控 制系统 研究 与设 计 的技术 人员 而 言 ,MATI B是 目前 控制 A 系统 计算 机辅 助设计 实用 且有 救 的工具 。这不 仅是 因 为 它能解 决控 制论 中大量 存在 的矩 阵运算 问题 ,更 因 为它提供 了强 有力 的工 具箱 支持 。与控 制 系统直接 相 关 的工 具箱 有控制 系统 、系统 辨 识、信 息处 理、优化 等 还有 一些 先进 和流行 的控 制 策略工 具箱 ,如鲁棒 控 制 、u 一分 析与 综台 、神经 网络 、模糊 预 测控 制 、非 线性 控 制设计 、模糊 逻辑 等 。 可以说 目前理论 界 和工 业 界 广 泛 应 用 和 研 究 的控 制 算 法 ,几 乎 都 可 以 在 MATI AB中找到相 应的 工 具箱 。 同时 ,MAT I AB软件 中还提供 了新 的控制 系统模 型输人与仿真工具 S MUI NK,它具有构 造模型简单 、 I I 动态修改参数实现系统控制容易 、 界面友好 、 功能强大等 优点 ,成为动态建模与仿 真方面应用 最广泛的软件包之一。它可以利用 鼠
无刷直流电机的模糊控制系统仿真
摘要无刷直流电动机是电力电子技术、微电子技术和永磁材料技术相结合的一种新型电动机。
无刷直流电动机具有体积小、运行可靠、控制相对简单等特点。
目前,无刷直流电机正在快速发展。
尤其是在家用电器、精密仪器、电梯控制等领域,无刷直流电动机都获得了很多成功应用。
本文详细的介绍了无刷直流电机的组成、基本原理和数学模型。
介绍了简单模糊控制器的设计过程。
通过分析MATLAB中“ac7_example”模型,利用Simulink 工具箱搭建模糊控制器,采用模糊控制法对无刷直流电机进行调速。
实现了无刷直流电机的模糊控制系统的计算机仿真。
结果表明,该模糊控制器结构简单、易于实现,能够基本满足系统的性能要求。
关键词:无刷直流电机;模糊控制;Matlab;SimulinkABSTRACTBrushless DC motor is the electric power and electronic technology, microelectronic technology and permanent magnet material technology is combined with a novel motor. Brushless DC motor has the advantages of small volume, reliable operation, control of relatively simple features such as. At present, brushless DC motor are rapid development. Especially in household appliances, precision instruments, elevator control and other fields, brushless DC motors have gained a lot of successful application.This paper introduces the brushless DC motor of the composition, basic principle and mathematical model. Introduction of simple fuzzy controller design process. Through the analysis of the MATLAB "ac7_example" model, the use of Simulink toolbox to build the fuzzy controller, the fuzzy control method of Brushless DC motor speed control. Realization of Brushless DC motor fuzzy control system computer simulation. The results show that, the fuzzy controller has the advantages of simple structure, easy to implement, can basically meet the system performance requirements.Key words:Brushless DC motor;fuzzy control;Matlab;Simulink目录第一章绪论 (1)一、课题背景 (1)二、无刷直流电机的发展历程 (1)三、无刷直流电机的结构特点 (2)四、无刷直流电机的应用 (2)五、主要研究内容 (3)第二章无刷直流电机的基本原理 (4)第一节无刷直流电机的基本组成 (4)第二节无刷直流电机的工作原理 (6)第三节无刷直流电机的数学模型 (7)第三章模糊控制仿真设计 (10)第一节模糊控制 (10)第二节Matlab简介 (12)第三节Simulink组件介绍 (12)第四节典型模糊控制设计 (13)第五节无刷直流电机系统的稳定性分析 (17)第四章无刷直流电机的糊控制仿真 (19)第一节无刷直流电机调速系统模型 (19)第二节无刷直流电机的模糊控制设计 (22)结论 (28)参考文献 (29)致谢 (30)第一章绪论一、课题背景无刷直流电机是一种把控制装置和电机本体结合在一起的机电一体化设备,它具有高效率,高功率,高可靠性等优点。
测控技术与仪器毕业论文范文——基于MATLABsimulink的无刷直流电机控制系统的建模和仿真

基于MATLAB/simulink的无刷直流电机控制系统的建模和仿真摘要在分析了无刷直流电机(BLDCM)的工作原理及控制系统的组成,推导出了无刷直流电机的数学模型。
并在此数学模型的基础上,提出了一种新型的基于MATLAB的无刷直流电机控制系统仿真建模的新方法,该方法借助MATLAB仿真软件,在Simulink环境下,把独立的功能模块和S函数相结合,构建了无刷直流电机系统的仿真模型。
系统采用双闭环控制:速度环采用离散PID控制,根据滞环电流跟踪型PWM 逆变器原理实现电流控制。
仿真和试验结果表明:波形符合理论分析,系统能平稳运行,电机转矩脉动小,系统过渡时间短,无超掉,稳态性能好,验证了该方法的合理性和有效性。
采用该BLDC仿真模型,可以十分便捷的实现、验证控制算法,改换或改进控制策略也十分简单,只需对部分功能模块进行替换或修改,而Simulink可以给长直接的构造控制系统并观察其结果。
此方法也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:无刷直流电机,建模,仿真,电流滞环,Matlab1 引言课题研究的背景、目的及意义无刷直流电机(Brushless DC Motor,以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
以其体积小、重量轻、效率高、惯量小和控制精度高等优点,同时还保留了普通直流电动机优良的机械特性,广泛应用于伺服控制、数控机床、机器人等领域[1]。
建立无刷直流电机控制系统的仿真模型,可以有效的节省控制系统设计时间,及时验证施加于系统的控制算法,观察系统的控制输出;同时可以充分利用计算机仿真的优越性,人为地改变系统的结构、加入不同的扰动和参数变化,以便考察系统在不同结构和不同工况下的动、静态特性[2]。
因此,如何建立有效的无刷直流电机控制系统的仿真模型成为电机控制算法设计人员迫切需要解决的关键问题。
本文在分析无刷直流电机数学模型的基础上,提出了一种新型的基于Matlab的BLDC控制系统仿真建模的新方法,将该方法在Simulink环境下结合S函数构建了无刷直流电机仿真模型,利用Matlab中的Simulink工具箱建立了BLDC控制系统的计算机仿真模型[3-4]。
Matlab模糊控制器的设计以及simulink下对模糊控制器系统的仿真(word文档良心出品)
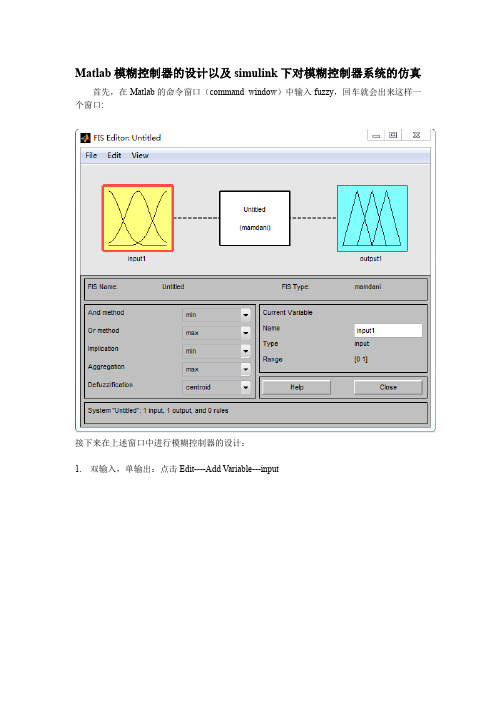
Matlab模糊控制器的设计以及simulink下对模糊控制器系统的仿真首先,在Matlab的命令窗口(command window)中输入fuzzy,回车就会出来这样一个窗口:接下来在上述窗口中进行模糊控制器的设计:1.双输入,单输出:点击Edit----Add Variable---input2.为E添加隶属度函数,E的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},E的模糊集合为{NB,NM,NS,NZ,PZ,PS,PM,PB},Edit—Membership Function edit,如下图所示:3.为EB添加隶属度函数,EB的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},EB的模糊集合为{NB,NM,NS,ZE,PS,PM,PB},Edit—Membership Function edit,如下图所示:4.为U添加隶属度函数,U的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},U的模糊集合为{NB,NM,NS,ZE,PS,PM,PB},Edit—Membership Function edit,如下图所示:其中E,EB,U均为模糊量。
5.为模糊控制器设计模糊规则,由于E的语言变量有8个,EB的语言变量有7个,所以模糊控制器的模糊规则总共有8*7=56条,接下来为模糊控制器添加规则:双击untitled,则有下面的表格:制定完成后,会形成模糊规则矩阵,系统会根据模糊输入量E,EB,经过模糊控制规则[56条],进而确定输出量U。
6.对输入量模糊化以及对输出量清晰化,我们采取最小最大重心法。
7.点击export—to file. ***#$.fis文件就是所设计的控制器。
8.下面对我们设计的模糊控制器进行检验,所构建的系统如下:系统分析:模糊控制器:双输入单输出,输入为误差以及误差的变化率的模糊量,输出为控制量的模糊量,模糊控制器中有56条规则。
模糊控制系统的MATLABSIMULINK仿真与分析

收稿日期:2000207203 基金项目:河南省教委自然科学基金项目(97465001) 作者简介:王东云(19642),男(汉族),湖南津市人,中原工学院电气工程系副教授、工学博士. 第11卷第4期郑州纺织工学院学报V ol.11 N o.42000年12月JOURNA L OF ZHENGZH OU TEXTI LE INSTITUTE Dec.,2000 文章编号:100724945(2000)0420001204模糊控制系统的MAT LAB ΠSI MULINK 仿真与分析王东云1,凌德麟2(1.中原工学院电气工程系;2.中原工学院院部,河南郑州 450007)摘要: 针对M AT LAB ΠSI M U LI NK 的模糊控制工具箱的使用方法和应用的相关文献尚未见到的情况,介绍了基于M AT 2LA B ΠSI M U LI NK 的模糊控制系统仿真分析的方法与步骤.在仿真的基础上,研究了量化因子、比例因子对模糊控制性能的影响.关 键 词: M AT LAB ΠSI M U LI NK;模糊推理系统;模糊控制;隶属度函数中图分类号:TP273.5 文献标识码:A MAT LAB 软件自1984年由美国的Math W orks 公司推出以来,其应用范围越来越广泛.目前的MAT LAB 已经成为国际上最为流行的软件之一[1].它除了传统的交互式编程之外,还提供了丰富的矩阵运算、图形绘制、数据处理、图像处理、方便的Windows 编程等便利工具.另外,MAT LAB 有很强的开放性,针对不同的应用学科,在MAT LAB 上可以推出不同的工具箱,这样就大大扩展了MAT LAB 的运用范围.目前,已经推出了控制系统的工具箱、系统辨识工具箱、神经网络工具箱、信号处理工具箱及模糊推理系统工具箱等许多学科性的工具箱,但针对具体的学科性的工具箱的使用方法和应用的相关文献尚未见到.因此本文详细介绍了利用MAT LAB5.0模糊推理工具箱,进行模糊控制系统的仿真与分析的方法与步骤.1 MAT LAB ΠSIMU LINK 简介MAT LAB 语言是一种面向科学与工程计算的高级语言,基本语法单元是矩阵.变量的赋值采用:变量=表达式的形式,变量有全局变量和局部变量两种.MAT LAB 的数据结构非常简单,只有数据变量和字符变量两种.MAT LAB 语言有三种基本的程序结构:顺序结构、循环结构及分支结构.其中循环结构有FOR -E ND 循环和WHI LE -E ND 循环两种.FOR -E ND 循环的一般形式为:FOR x =表达式(形如x =起点:步长:终点)循环体E ND WHI LE -E ND 循环的一般形式为:WHI LE 表达式(表达式非零,则执行循环体)循环体E ND 分支、结构的一般形式为:IF (表达式(非零)) 语句体 1E LSE 语句体 2E NDMAT LAB 的M 文件在功能上可分为两种类型:文本文件和函数文件.这两种文件都是ASCII 码的文本格式.文本文件包含一系列专门的MAT LAB 语句,当运行一个文本文件时,将自动执行一系列命令直至给出最终结果,而不是交互地等待键盘输入,如M 文件的第一行包“FUNCTI ON ”,则这个文件就是函数文件.其一般形式:FUNCTI ON[输出函数1,输出函数2,…]=函数名(输入参数1,输入参数2,…).函数调用格式:[输出参数1,输出参数2,…]=函数名(输入参数1,输入参数2,…).M A T LA B 有很强的绘图功能,用命令plot ()实现.SI MU LI NK 子库是一个建模、分析各种物理和数学系统的软件.它用框图表示各系统的各个环节,用带方向的连线表示各环节的输入输出关系.SI M U LI NK 的启发十分丰富,只需在命令窗口键入“SI M U LI NK ”命令,此时出现一个SI M U LI NK 窗口,包含七个模型库和一个DE M OS ,分别是:信号源库、输出库、离散系统库、线性系统库、非线性系统库及扩展系统库.在这些库中你可以找到你所需的每个环节,必要时,你还可以建立自己的环节库.具体方法可参见文献[2].2 利用M A T LA B 建立模糊控制仿真系统2.1 利用图形编辑器编辑模糊推理系统(FIS )在MAT LAB 的命令状态下键入Fuzzy.模糊推理系统图形编辑器如图1所示.它显示了模糊推理系统的高层信息.在顶部有一标名为输入和输出的系统图表,通过双击输入或输出框,产生隶属函数编辑器;双击图表中心的模糊规则框,产生规则编辑器.图1 模糊推理系统图形编辑器 图表的下方是显示当前FIS 名的文本区.窗口的左下角有一系列弹出菜单使你能定义用于模糊隐含程序的变量函数,右下方是提供关于当前变量信息的区域.通过单击输入或输出框来决定当前变量.如此我们构造了一个模糊推理系统,即建立了模糊控制器的输入输出变量名称、个数、变量的论域、分档、隶属度函数的形式、模糊运算方法、去模糊的方法、模糊规则集等.实际上我们可以利用show fis ()函数来查阅有关模糊推理系统的信息.另外还可以给刚刚建立的模糊推理系统取个名字,如:Firstfis.2.2 利用SIMU LINK 的图形编辑器构造模糊控制系统图2为一常规模糊控制系统.图2 常规的模糊控制系统结构其中:K 1、K 2为量化因子;K 3为比例因子.对如图2所示的模糊控制系统我们可以使用SI M 2U LI NK 的图形编辑器构造出,其步骤如下:(1)键入simulink ,进入SI MU LI NK 的图形编辑器.(2)在File ΠNew 下建立一个M odel 文件.(3)根据控制系统结构,利用SI MU LI NK 的图形编辑器,从SI MU LI NK 的模型库中“拖出”所需的各个环节,如在Blockets &T oolboxes 中的SI MU LI NK Fuzzy 库中,我们可以“拖出”Fuzzy logical controller ,在Linear 库或其它库中,我们可以设定控制对象.最后我们可以构造出所需的控制系统(见图3).图3 模糊控制系统控制框图 注意在“拖出”所需的各个环节后,可以设置各环・2・ 郑州纺织工学院学报 2000年 第11卷 节的参数.如设置比例环节的比例系数等.注意在设置模糊控制器时,要把在第一步建立的模糊推理系统与之统一起来,这样就可以在仿真时使用.这时我们可以使用MAT LAB 命令:afuzzycontroller =readfis (‘firstfis ’)其中firstfis 为在第一步建立的模糊推理系统名,接下来我们可以开始仿真.3 基于MAT LAB 的模糊控制仿真分析实例 对图2的一个经典的二维模糊逻辑控制器,比例因子K 1和K 2分别相当于模糊控制的比例作用和微分作用的系数,K 3则相当于总的放大倍数[3,4].K 1,K 2增大,相当于控制器的比例作用、微分作用增强;而K 3增大,相当于控制器的放大倍数加大.如图4为不同K 1时系统的阶跃响应.如图5为不同K 3时系统的阶跃响应.由以上仿真结果,我们不难分析出量化因子和比例因子对控制系统性能的影响:图4 K 1为不同值的系统响应图5 K 3为不同值的系统响应 (1)K 1越大,系统调节惰性越小,上升速率越快.(2)K 1过大,系统上升速率过大,产生的超调大,使调节时间增长,严重时还会产生振荡乃至系统不稳定.(3)K 1过小,系统上升速率较小,系统调节隋性变大,同时也影响系统的稳态性能,使稳态精度降低.(4)K 3增大,相当于系统总的放大倍数增大,系统的响应速度加快.(5)K 3过大,会导致系统输出上升速率过大,从而产生过大的超调乃至振荡和发散.(6)K 3过小,系统的前向增益很小,系统输出上升速率较小,快速性变差,稳态精度变差.4 结 语利用MAT LAB 来实现模糊控制器的仿真分析非常简便,为研究模糊控制理论、设计模糊控制器提供了有力的工具.如何利用MAT LAB 来实现自适应模糊控制器的仿真分析与设计,应是我们下一步要研究的问题.参考文献:[1] 张培强.M AT LAB 语言—演算纸式的科学工程计算语言[M].合肥:中国科技大学出版社,1995.228-327.[2] 施阳,李涛,许忻等.M AT LAB 语言精要及动态仿真工具S imulink[M].西安:西北工业大学出版社,1998.356-367.[3] 孙庚山,兰西柱.工程模糊控制[M].北京:机械工业出版社,1995.76-81.[4] 章正斌,吴汝善,于健.模糊控制工程[M].四川:重庆大学出版社,1995.288-290.(下转第7页)・3・ 第4期 王东云等:模糊控制系统的M AT LAB ΠSI M U LI NK 仿真与分析 (2)与静态冰蓄冷相比,动态冰蓄冷有以下特点:蓄冰槽内水温分布较均匀,不会出现温度不均及槽体的结构产生的“死区”.由于减少了管外冰壳造成的热阻,使水温下降较快,提高了整体结冰速度;且水流均匀冲刷盘管壁面,增大了管外的换热系数,充分利用了水的显热与潜热蓄冷的能力.(3)建议在冰蓄冷的过程中,采用动态的蓄冷过程.提高水的显热及潜热的利用能力.同时由于动态蓄冰时,槽体内水温低并且均匀,使释冷水温在较长时间保持稳定,提供较大的释冷速率,适应于短时间内需要大量的冷量的场合.国内一些公共建筑,如:体育馆、影剧院、会堂等均可采用动态冰蓄冷技术,提高经济效益.5 致谢本实验得到了中原工学院暖通空调教研室周光辉、范晓伟、王军及其专业实验室付光轩、刘寅等老师的大力帮助,在此表示感谢.参考文献:[1] 方贵银.蓄冷平板堆积床动态蓄冷性能研究[J ].制冷,1999,(2):1-6.[2] 华泽钊,刘道明.蓄冷技术及其在空调中的应用[M].北京:科学出版社,1997.48-64.[3] 张永铨.蓄冷空调系统[M].北京:中国建筑工业出版社,1998.20-38.[4] W.D.马克劳斯基.陈义雄译.冰蓄冷与区域供冷[J ].暖通空调,1996,(1):71-73.Experimental R esearch of W ater T emperature Form ation in theCooling Storage T ank for Dynamic and Static Perform ance Cooling SystemsLI U Jian 1,G ONG Y i2(1.X i ′an University of Architecture &T echnology ,X i ′an 710049;2.Zhongyuan Institute of T echnology ,Zhenzhou 450007,China ) Abstract : The purpose of this paper focuses specially on the experimental research on the water tem perature formation mechanism of the ice storage processes on the external melt ice 2on 2coil system in the ice storage tank ,in which the system op 2erats with different performance.Through the research of this system ,the characteristic of the initial tem perature of the cooling water with the time is studied.The result can be used by engineering designer.K ey w ords : evaporator helical coil ;ice storage am ount ;cooling space(上接第3页)Simulation and Analysis for Fuzzy ControlSystem B ased on MAT LAB ΠSIMU LINKWANG Dong 2yun ,LI NG De 2lin(Zhongyuan Institute of T echnology ,Zhengzhou 450007,China ) Abstract : Methods for simulating and analyzing fuzzy control system with MAT LAB ΠSI MU LI NK are introduced in thispaper ,for no relating references were published.Further m ore effect on performance of fuzzy control system by quantum factor and proportional factor is studied.K ey w ords : MAT LAB ΠSI MU LI NK;fuzzy inference system (FIS );fuzzy control ;membership function・7・ 第4期 刘 建等:动、静态冰蓄冷蓄冷槽水温变化的实验分析 。
直流电机控制方法的Matlab仿真研究

直流电机控制方法的Matlab仿真研究作者:徐莉来源:《现代电子技术》2016年第03期摘要:针对无刷直流电机的控制方法进行了深入研究。
根据无刷直流电机实际物理模型建立相应的数学模型,电机使用双闭环进行控制。
根据电机的实际工作特点,使用模糊自适应PID算法替代常规PID算法建立速度控制模型,以提高无刷直流电机速度控制系统的稳定性和抗干扰能力。
使用Matlab/Simulink工具箱建立无刷直流电机的仿真模型,研究结果表明,模糊自适应PID算法能够使无刷直流电机的速度更加平稳,在载荷扰动下快速恢复设定速度,使得控制系统具有更好的鲁棒性。
关键词:直流电机; Matlab;模糊PID算法;仿真研究中图分类号: TN919⁃34; TP391.9 文献标识码: A 文章编号: 1004⁃373X(2016)03⁃0151⁃04Research on Matlab simulation for DC motor control methodXU Li(Department of Automation Engineering, Sichuan Vocational College of Chemical Technology, Luzhou 646005, China)Abstract: The control method of brushless DC motor is studied deeply. According to the actual physical model of brushless DC motor, the corresponding mathematical model is established, in which the motor is controlled by double closed⁃loop scheme. On the basis of the real working characteristics of the motor, the conventional PID algorithm is replaced by the fuzzy adaptive PID algorithm to establish the speed control model, so the stability and anti⁃interference ability of the brushless DC motor speed control system can be improved. The simulation model of brushless DC motor was established by Matlab/Simulink toolbox. The research results show that the fuzzy adaptive PID algorithm can make the speed of the brushless DC motor stable, and the speed can recover to the setting speed quickly under load disturbance. The control system has perfect robustness.Keywords: DC motor; Matlab; fuzzy PID algorithm; simulation research0 引言随着社会的不断进步,科学技术的不断发展,人们对电机的使用频率以及性能要求不断提高。
毕业设计--直流电机模糊控制系统设计
1 绪论直流电动机经常被当做控制元件来使用,离生活越来越近。
PID控制法是控制直流电机常用的方法。
在有些情况下,控制器都是在对象有精确数学模型的基础上建立起来的。
但是,还有其他在许多情况下,由于各方面的原因,生产过程或者被控对象的精确数学模型无法建立。
在构建模型的过程中,一些参数需要估计,而且在解决这些参数的过程中,往往会因为对整个控制过程和它的系统特性没有做到全面的了解,从而导致了精简后的数学模型在说明原来的系统上存在较大的偏差,使得设计的系统变得没有实用价值;还有一些由于在生产环境中,没有合适的测量方法,或者由于空间因素,整个测量过程中没办法安装测量装置最后导致了数学模型无法建立[1~3]。
目前,随着科技的不断进步,如今研究的控制系统中将会经常涉及到多变量、非线性、时变的系统,在这种情况下,要建立数学模型也是非常困难的,或者在这个情况下根本不能建立模型。
在这种背景下,传统的控制理论和技术迎来了新的要求和挑战。
一种可以处理语言信息能力的模糊控制理论的提出克服了上面所出现的问题。
在模糊控制理论的基础上设计出了模糊控制器,而且它能够模仿操作员工的手动控制。
这种模糊控制器对已知受控对象的数学模型无明确的要求,但是,需要注意:模糊控制器对已知被控对象的数学模型无明确的要求,并不是在对受控对象无了解的情况下提出的[4~6]。
恰恰相反,它仍然需要对受控对象有一定的了解,只不过它们是以知识的模型的形式而并不是用数学模型表达的。
所以,在直流电动机中应用模糊控制对现代生活有着重大的意义,也是一个新的里程碑。
1.1 本课题研究的背景和意义随着时代的发展,交流和直流调速不断冲击着,但是我国在这个直流调速领域中的研究不断深入,专家们研制出了全数字直流调速系统[7]。
这个调速系统有着较高的精度,而且很实用,使得直流调速系统成为工业过程中不可缺的一部分。
直流调速系统有稳速、调速和加减速这个三种控制要求。
在目前的控制过程中,对于调速和加减速已经得到了良好的实现,但是在生产过程中稳速的效果不是很理想,达不到预想中的的效果。
基于MATLAB_SIMULINK直流电机模煳控制系统的建模与仿真

Appliances Technology
基于 MATLAB/SIMULINK 直流电机模糊控制系 统的建模与仿真
肖文英 1 ,李军红 2 ,阳武娇 2 ( 1 . 湖南工学院电气与信息工程系,湖南衡阳 4 2 1 0 0 8 ;
2 . 南华大学,湖南衡阳 4 2 1 0 0 1 ) 摘 要: 将 M A T L A B 中的模糊控制工具箱和 S I M U L I N K 有机结合起来,实现了直流电 机模糊控制系统的建模与仿真。 关键词: 模糊控制; 直流电机; S I M U L I N K
1 引言
计算机仿真技术是应用电子计算机对研究对象的 数学模型进行计算和分析的方法。M A T L A B 是目前控制 系统计算机辅助设计最有效的工具,它不仅能解决控 制论中大量的矩阵运算问题,而且提供了强有力的工 具箱支持[ 1 ] 。另外,M A T L A B 中还嵌入了控制系统模型输 入与仿真工具 S I M U L I N K 。S I M U L I N K 具有建模简单直观、 动态修改系统参数、界面友好、功能强大等优点,是动 态建模与仿真方面应用最广泛的软件包之一[ 2 ] 。本文将 M A T L A B 中的模糊控制工具箱和 S I M U L I N K 有机结合起 来,实现了直流电机模糊控制系统的建模与仿真。
43
MATLAB/SIMULINK- Based Modeling and Simulation of Fuzzy Control
SystemforDC Motor XIAO Wen-ying LI Jun-hong YANG Wu-jiao Nanhua University, Hengyang, 421001, China Abstract: This paper introduces the modeling and simulation of fuzzy control system for DC motor. It is realized by combining the fuzzy control box and the SIMULINK module in MATLAB. Key words: Fuzzy control; DC motor; SIMULINK
基于MATLAB的直流电机模糊控制系统仿真

引 言
近年泉 .戈 : 一 铬 能控制的 究 分 十 跃.作 的智能控制拄术的 1爱打浊 .幔糊 : 控带 ∞研究 和发幔.已经徕 凡|l f I 电 传动
系 统 领 域 , 并 给 控 制 策 略骷 采 r新思 路 辑 靳 方法 , 1
13点浅电动机的逛横和参数 设置 .
D C m3 n } t r 鲫 t
, o  ̄ n r I s t m.h n n l e 于 t o ys e t e a ays s
mu bn ∞ u . T r r Ut 虮 0 钢 ws % t te c t l h ∞ c 撇 埘 f a mz c O r ne
MAT {} 】 I 找毋 A_ 的 工具筘: 本文以此 如基 础 ,运 Ⅲ 模 糊 逻辑 控 制 , 遵 r 电机 榨制系统m似真悭掣 .j通过 r-靠的忻 i :
真实 验
1
,
螈。备相参数 | 竺髓:幅恤取 2 0 2 V、各相相 位互摹 l O ,频率 5 H “ 此可得 i 2 0z I 相 对称 交 『 杰电源 。 12品闸管链流桥的 建摸和参数设霞 . 从 电 力 电 予 模 块 蛆 中 选 取 nv  ̄3 B ig 懂块 .件将模块改为 ie 1 r e d
维普资讯
中国科技 信息 2 0 0 6年第 8期 CHN  ̄ IN E N E H O O Y 卜 oR IA E C A D T C N L G I M^T 0 Ap 0 6 F l N 『2 0
J MAT 二 LAB的
陈 刚 南京 工程 学 院 电 力 系 2 0 5 1 ‘ 0
任 电 帆 系 统 模块 组 t 选 取 D C } 一 Ma h n 模块 . 许&柄 签为 。 c ie i 淡 电动
直流电机模糊控制系统的MATLABSimulink仿真研究
直流电机模糊控制系统的MATLABSimulink仿真研究毕业设计说明书直流电机模糊控制系统的MATLAB/Simulink仿真研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
XXXX届毕业设计说明书直流电机模糊控制系统的MATLAB/Simulink仿真研究院、部:电气与信息工程学院学生姓名:XXX指导教师:XXXX职称教授职称专业:XXXXXXXXXXXXX班级:XXXXXXXXX完成时间:20XX.X.X摘要在当今控制技术的发展当中,模糊控制技术的发展走在了前列,成为了当今世界上最先进的控制技术之一。
模糊控制技术很好的将模糊数学理论应用于控制领域当中, 更加真切地模拟出了人脑的思维方式和判断能力, 以及对产品生产的过程进行筛选和对产品质量上的控制, 从而发展出了基于模糊控制技术的智能化的新技术,为当今控制技术的发展提供了广阔空间。
在本文当中,主要介绍了基于模糊控制理论的直流电机模糊控制系统的原理,以及直流电机模糊控制系统的优点和缺点,并通过使用MATLAB语言中SIMULINK 模块和模糊控制工具箱对直流电机模糊控制系统进行仿真,把控制直流电机调速的实际情况转换成模糊控制规则,再使用这些规则,对过程经过模糊推理和模糊决策所得到的控制量,从而实现在MATLAB语言中SIMULINK模块和模糊控制工具箱对直流电机模糊控制系统的建模与仿真。
对仿真结果予以分析,对直流电机模糊控制系统的仿真进行总结。
关键词:MATLAB;SIMULINK;模糊控制;直流电机;电机调速ABSTRACTAmong today’s control technology development, one of the leading enterprises in the development of fuzzy control technology, fuzzy control technology has become one of the most advanced control technology in the world today, it will be a very good fuzzy control technology of fuzzy mathematics theory is applied in control field, the more realistically simulate the human brain’s way of thinking and judgment ability, as well as to the production process of screening and the control on the quality of product, which was developed based on fuzzy intelligent control technology of the new technology, for the development of modern control technology provides a broad expansion of space.in this article, mainly introduced the dc motor based on fuzzy control theory, the principle of fuzzy control system, as well as the advantages and disadvantages of the fuzzy control system for dc motor, and by using the SIMULINK module and the fuzzy control toolbox in MATLAB language for the calculation of the fuzzy control system of dc motor, the control of the actual situation of the dc motor speed control is converted into fuzzy control rules, and then use these rules, the process through fuzzy reasoning and fuzzy decision of control, thus to achieve the SIMULINK module and the fuzzy control toolbox in MATLAB language modeling and simulation of fuzzy control system of a dc motor. And the analysis to the results of simulation and simulation of fuzzy control system of dc motor.Keywordsmatlab;Simulink;fuzzy control;dc motor;motor speed control目录1 绪论 (1)1.1 研究的目的与意义 (1)1.2 国内外的发展现状及发展历程 (1)1.2.1 直流调速系统的发展历程 (1)1.2.2 直流调速控制系统的发展现状 (2)1.3 研究的主要内容及章节介绍 (3)2 直流调速系统 (4)2.1 直流调速系统的基本概念 (4)2.1.1 直流他励电动机的调速方法 (4)2.1.2 直流调速系统的供电方式 (6)2.1.3 开环V-M系统的机械特性 (7)2.2 直流调速系统的动态分析 (8)2.2.1 单闭环直流调速系统的动态分析 (8)2.2.2 多环直流调速系统的动态分析 (9)2.3 直流脉宽调速系统概述 (10)3直流电机 (11)3.1 直流电动机的基本结构和工作原理 (11)3.1.1 直流电动机的基本结构 (11)3.1.2 直流电动机的工作原理 (12)3.2 直流电动机的运行特性 (14)3.3直流电动机的起动、调速和制动 (17)3.3.1 直流电动机的起动 (17)3.3.2 直流电动机的调速 (17)3.3.3 直流电动机的制动 (17)4模糊控制 (19)4.1 模糊控制原理 (19)4.2 模糊控制器的一般设计步骤 (20)5直流电机模糊控制系统的MATLAB/Simulink的仿真 (22)5.1 建立直流电机的仿真模型 (22)5.2模糊控制器的设计 (22)5.3 直流电机模糊控制系统的建立与仿真 (24)5.4 仿真结果及分析 (27)6 总结与展望 (28)参考文献 (39)致谢 (31)1绪论1.1研究的目的与意义在工业现代化的发展当中,直流电机的使用非常广泛。
对直流电机的控制也越来越重要,在现代的工业生产当中,对生产的过程控制要求比较严格,对生产出来的产品质量的要求也相当严格,这就要求在现代工业生产过程当中,对控制的要求控制精度准确、易于调速、运行稳定。
在工业生产过程中为提高产品的质量和产品的产量,控制过程从人工手动控制慢慢向半自动控制发展,半自动控制慢慢向全自动控制发展,使得生产工艺实现全自动化生产,在全自动化生产的过程当中,离不开传动系统的调速电机对生产设备的控制,按驱动电动机的类型可分为直流传动系统和交流传动系统二大类。
本文中主要研究直流传动系统。
直流电动机具有很多优良的调速特性,如:调速平滑、简单易控、过载能力大、正反转能快速切换、并可实现频繁地无级快速起动和制动。
能够满足在现代化工业的生产过程当中不同环境下的的特殊运行要求,如:在生产机械设备的切削机床、生产用纸的纸机设备、全自动生产电子产品的生产线、水泥厂等对控制性能要求非常高的工业生产当中被广泛应用,使得直流电机在现代工业生产当中仍然充当着重要角色。
1.2国内外发展历程及发展现状1.2.1直流调速系统的发展历程在运动控制系统的发展过程当中,交流电气传动和直流电气传动并存于工业生产的各个领域,在历史上最早出现的是直流电动机,在没有出现交流电动机之前,直流电气传动是惟一的电气传动方式,随着工业生产技术的向前发展,对电气传动在启动、制动、正转、反转、调速精度、调速范围、静态特性、动态响应等方面提出了更高的要求,这就要求在工业生产当中大量的使用直流传动调速系统,由于直流电动机的调速性能和转矩控制性能非常好,从20世纪30年代起。
直流调速系统开始应用于工业的各个领域。
最早的控制系统是由旋转变流机组控制来实现的,而后慢慢发展成为由放大机和磁放大器控制系统来实现控制的,经过放大机和磁放大器控制的时代的发展,基于它们的闭环连续控制系统得到广泛应用,在改进控制的性能方面,取得了良好的效果,到后面晶闸管变流装置和模拟控制器的出现,使得控制真正实现了直流调速,一直到后面可控整流和大功率晶体管组成的PWM控制电路的出现,才得以实现了使用数字化对直流的调速。
而直流调速在工业应用方面具有快速、可靠、经济、稳定、方便等特性,使得直流调整系统在工业应用方面非常广泛。
在直流电气传动系统中,有如下几种常用的可控直流电源:(1)使用恒定的直流电压直接向直流电动机电枢供电,改变阻值的大小来实现对电枢回路的调速。
这种通过改变电阻的大小,从而改变电压值的大小来调速的方法简单,便于操作,工业生产方面也简单,而且成本低。
这种方法也有着不少缺点,比如:这种调速转化率低,机械性能差,调速易于波动,不能进行平滑调速。
由于这些缺点的存在,便得这种方法在工业生产当中使用率很低。
(2)30年代末,发电机-电动机(也称为旋转变流组)的问世,增加了调速领域的灵活性、广泛性等,同时存在的闸流管、电机扩大机、及磁放大器等控制器件共同组成的调速系统,提高了调速的各方面的性能,如:提高了调速平滑变化、调速转速精度、及加宽了调速范围、提高效率等。
特别发电机-电动机的使用,很容易就实现了将电动机轴上的飞轮惯量反馈给电网,不仅提高了效率,减少了能量损耗,而且能够很好的实现平滑制动。
但是这样的调速系统还是存在着不少缺点,如因此增加的辅助设备(旋转电机和励磁设备等),造成占地面积大、转化率低、维修难度大、不易维修、成本高等。
(3)直到汞弧变流器出现以后,汞弧变流器开始慢慢取代了发电机-电动机调速控制系统,进一步提高了调速控制系统的性能。
(4)世界上第一只晶闸管的问世是在1957年,晶闸管的问世,让整个直流调速系统发生了极大的变化,因为晶闸管具有可靠性高、反应灵敏、所占空间小、简便耐用等优良性能,使得晶闸管提到了广泛的应用,不仅提高了直流调速系统的可靠性和经济效益,而且在工业生产使用中相对其他直流控制的性能上也具有很大的优势,晶闸管变流装置比机组和汞弧变流器的放大倍数分别高1000倍和10倍,自身的放大倍数在10000以上,而机组和汞弧变流器的放大倍数分别是10倍和1000倍。