STM32F103 Pin Assignment
stm32F103寄存器整理
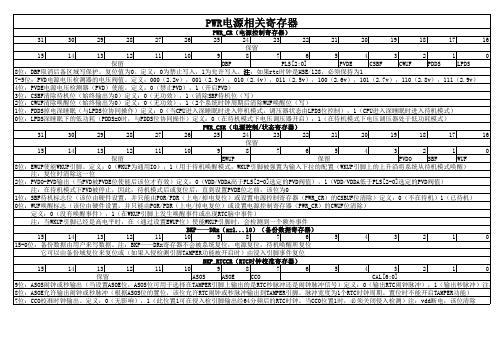
6-0位:CAL校准值。表示在每2的20次方个时钟脉冲内将有多少个脉冲被跳过。这可用来对RTC进行校准,以1000000/(2的20次方比例减慢时钟)可用被减慢0-121ppm BKP_CR(备份控制寄存器) 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 保留 TPAL TPE 1位:TPAL侵入检测TAMPER引脚有效电平。定义:0(检测TAMPER脚高电平清除备份数据)1(检测TAMPER脚低电平清除备份数据) 2位:TPE启动入侵检测TAMPER引脚。定义:0(TAMPER脚为普通IO),1(开启检测) 注:TPAL、TPE同时置为可用,但同时清零则会出问题。所以推荐在TPE为0时才改变TPAL位状态。 BKP_CSR(备份控制/状态寄存器) 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 保留 TIF TEF 保留 TPIE CTI CTE 9位:TIF侵入中断标志(当检测有侵入事件且TPIE为1时,此为硬件置1,通过向CTI位写1来清除标志位(同时也清除中断)。如果TPIE被清除,此位也会被清除。 定义:0(无侵入),1(检测到侵入)注:仅当系统复位或由待机模式唤醒后才复位该位 8位:TEF侵入事件标志(当检测到侵入事件时此位由硬件置1。通过向CTE位写1可清除此标志位)定义:0(无侵入事件),1(有侵入事件) 注:侵入事件会复位所有的BKP_DRx寄存器。只要TEF为1,所有的BKP_DRx寄存器就一直保持复位状态。当此位被置1时,若对BKP_DRx写操作,则不会保存。 2位:TPIE:允许侵入TAMPER引脚中断。定义0(禁止侵入检测中断),1(允许(BKP_CR寄存器TPE位也必须置1) 注:1、侵入检测无法将系统内核从低功耗模式唤醒,2、仅当系统复位或由待机模式唤醒后才复位该位 1位:CTI清除侵入检测中断(只能写入,读出值为0)定义:0(无效)1(清除侵入检测中断和TIF侵入检测中断标志)
STM32f103寄存器说明
CRC寄存器(一种算法,用以确认发送过程中是否出错)数据寄存器:CRC_DR可读写,复位值:0xFFFF FFFF;独立数据寄存器:CRC_IDR临时存放任何8位数据;控制寄存器:CRC_CR只零位可用,用于复位CRC,对其写1复位,由硬件清零;PWR电源控制(控制和管理电源)电源控制寄存器:PWR_CR控制选择系统的电源电源控制/状态寄存器:PWR_CSR睡眠或待机模式电源控制BKP备份寄存器(用以控制和管理备份数据)备份数据寄存器x:BKP_DRx (x = 1 … 10) 10个16位数据寄存器用以存储用户数据RTC时钟校准寄存器:BKP_RTCCR控制实时时钟的运行备份控制寄存器:BKP_CR控制选择清除备份数据的类型备份控制/状态寄存器:BKP_CSR对侵入事件的控制RCC寄存器(时钟的选择、复位、分频)时钟控制寄存器(RCC_CR)各时钟状态显示时钟配置寄存器(RCC_CFGR)时钟分频时钟中断寄存器(RCC_CIR)控制就绪中断使能与否APB2外设复位寄存器(RCC_APB2RSTR) APB1外设复位寄存器(RCC_APB1RSTR) 复位APB各功能寄存器AHB外设时钟使能寄存器(RCC_AHBENR) AHB时钟使能控制APB2外设时钟使能寄存器(RCC_APB2ENR) APB1外设时钟使能寄存器(RCC_APB1ENR) APB1时钟使能控制备份域控制寄存器(RCC_BDCR)备份域时钟控制控制/状态寄存器(RCC_CSR)复位标志寄存器AHB外设时钟复位寄存器(RCC_AHBRSTR) 复位以太网MAC模块时钟配置寄存器2(RCC_CFGR2)时钟选择与分频GPIO寄存器(设置端口的功能)端口配置低寄存器(GPIOx_CRL) (x=A..E)端口配置高寄存器(GPIOx_CRH) (x=A..E)端口输入数据寄存器(GPIOx_IDR) (x=A..E)只读数据,读出IO口的状态端口输出数据寄存器(GPIOx_ODR) (x=A..E) 可读可写端口位设置/清除寄存器(GPIOx_BSRR) (x=A..E)端口位清除寄存器(GPIOx_BRR) (x=A..E)将某一端口清零端口配置锁定寄存器(GPIOx_LCKR) (x=A..E) 用于保护端口配值AFIO寄存器(将端口重映射到其它端口用以端口的第二功能)事件控制寄存器(AFIO_EVCR)选择时间输出端口与引脚复用重映射和调试I/O配置寄存器(AFIO_MAPR) 各寄存器功能引脚重映射选择外部中断配置寄存器1(AFIO_EXTICR1)外部中断配置寄存器2(AFIO_EXTICR2)外部中断配置寄存器3(AFIO_EXTICR3) 外部中断配置寄存器4(AFIO_EXTICR4) 外部中断引脚重映射选择EXTI 寄存器(外部中断控制器)中断屏蔽寄存器(EXTI_IMR)用于屏蔽或开放某一引脚的中断请求事件屏蔽寄存器(EXTI_EMR)用于屏蔽或开放某一引脚的事件上升沿触发选择寄存器(EXTI_RTSR) 禁止或允许某一引脚的上升沿触发下降沿触发选择寄存器(EXTI_FTSR) 禁止或允许某一引脚的下降沿触发软件中断事件寄存器(EXTI_SWIER) 控制某引脚的软件中断挂起寄存器(EXTI_PR)显示某线的引脚有无触发请求DMA寄存器(脱离cpu的传输模式)DMA中断状态寄存器(DMA_ISR)中断情况标志器DMA中断标志清除寄存器(DMA_IFCR) 手动清除标志位DMA通道x配置寄存器(DMA_CCRx)(x = 1…7)传输控制寄存器DMA通道x传输数量寄存器(DMA_CNDTRx)(x = 1…7)数据传输剩余数量存储器DMA通道x外设地址寄存器(DMA_CPARx)(x = 1…7)设置数据传输外设源或目标地址DMA通道x存储器地址寄存器(DMA_CMARx)(x = 1…7)设置存储器地址ADC寄存器(模数转换器)ADC状态寄存器(ADC_SR)AD转换标志寄存器ADC控制寄存器1(ADC_CR1)ADC控制寄存器2(ADC_CR2)设置AD转换的各种功能ADC采样时间寄存器1(ADC_SMPR1)ADC采样时间寄存器2(ADC_SMPR2)某通道选择固定的采样时间ADC注入通道数据偏移寄存器x (ADC_JOFRx)(x=1..4) 设置数据偏移量ADC看门狗高阀值寄存器(ADC_HTR)设置模拟看门狗的阀值高限ADC看门狗低阀值寄存器(ADC_LRT)设置模拟看门狗的阀值低限ADC规则序列寄存器1(ADC_SQR1)ADC规则序列寄存器2(ADC_SQR2)ADC规则序列寄存器3(ADC_SQR3)设置ADC顺序ADC注入序列寄存器(ADC_JSQR)ADC 注入数据寄存器x (ADC_JDRx) (x= 1..4)ADC数据结果寄存器ADC规则数据寄存器(ADC_DR)DAC寄存器(数模转换器)DAC控制寄存器(DAC_CR)DAC软件触发寄存器(DAC_SWTRIGR)DAC通道1的12位右对齐数据保持寄存器(DAC_DHR12R1) DAC通道1的12位左对齐数据保持寄存器(DAC_DHR12L1) DAC通道1的8位右对齐数据保持寄存器(DAC_DHR8R1) DAC通道2的12位右对齐数据保持寄存器(DAC_DHR12R2) DAC通道2的12位左对齐数据保持寄存器(DAC_DHR12L2) DAC通道2的8位右对齐数据保持寄存器(DAC_DHR8R2)双DAC的12位右对齐数据保持寄存器(DAC_DHR12RD)双DAC的12位左对齐数据保持寄存器(DAC_DHR12LD)双DAC的8位右对齐数据保持寄存器(DAC_DHR8RD) DAC通道1数据输出寄存器(DAC_DOR1)DAC通道2数据输出寄存器(DAC_DOR2)TIM1和TIM8寄存器(高级的定时计数寄存器)TIM1和TIM8控制寄存器1(TIMx_CR1)TIM1和TIM8控制寄存器2(TIMx_CR2)TIM1和TIM8从模式控制寄存器(TIMx_SMCR)TIM1和TIM8 DMA/中断使能寄存器(TIMx_DIER) TIM1和TIM8状态寄存器(TIMx_SR)TIM1和TIM8事件产生寄存器(TIMx_EGR)TIM1和TIM8捕获/比较模式寄存器1(TIMx_CCMR1) TIM1和TIM8捕获/比较模式寄存器2(TIMx_CCMR2) TIM1和TIM8捕获/比较使能寄存器(TIMx_CCER) TIM1和TIM8计数器(TIMx_CNT)TIM1和TIM8预分频器(TIMx_PSC)TIM1和TIM8自动重装载寄存器(TIMx_ARR)TIM1和TIM8重复计数寄存器(TIMx_RCR)TIM1和TIM8捕获/比较寄存器1(TIMx_CCR1)TIM1和TIM8捕获/比较寄存器2(TIMx_CCR2)TIM1和TIM8捕获/比较寄存器3(TIMx_CCR3)TIM1和TIM8捕获/比较寄存器(TIMx_CCR4)TIM1和TIM8刹车和死区寄存器(TIMx_BDTR)TIM1和TIM8 DMA控制寄存器(TIMx_DCR)TIM1和TIM8连续模式的DMA地址(TIMx_DMAR)TIMx寄存器(控制定时器)控制寄存器1(TIMx_CR1)控制寄存器2(TIMx_CR2)从模式控制寄存器(TIMx_SMCR)DMA/中断使能寄存器(TIMx_DIER)状态寄存器(TIMx_SR)事件产生寄存器(TIMx_EGR)捕获/比较模式寄存器1(TIMx_CCMR1)捕获/比较模式寄存器2(TIMx_CCMR2)捕获/比较使能寄存器(TIMx_CCER)计数器(TIMx_CNT)预分频器(TIMx_PSC)自动重装载寄存器(TIMx_ARR)捕获/比较寄存器1(TIMx_CCR1)捕获/比较寄存器2(TIMx_CCR2)捕获/比较寄存器3(TIMx_CCR3)捕获/比较寄存器4(TIMx_CCR4)DMA控制寄存器(TIMx_DCR)连续模式的DMA地址(TIMx_DMAR)TIM6和TIM7寄存器(基本定时计数器)TIM6和TIM7控制寄存器1(TIMx_CR1)TIM6和TIM7控制寄存器2(TIMx_CR2)TIM6和TIM7 DMA/中断使能寄存器(TIMx_DIER)TIM6和TIM7状态寄存器(TIMx_SR)TIM6和TIM7事件产生寄存器(TIMx_EGR)TIM6和TIM7计数器(TIMx_CNT)TIM6和TIM7预分频器(TIMx_PSC)TIM6和TIM7自动重装载寄存器(TIMx_ARR)RTC寄存器(实时时钟)RTC控制寄存器高位(RTC_CRH)RTC控制寄存器低位(RTC_CRL)16.4.3 RTC预分频装载寄存器(RTC_PRLH/RTC_PRLL) 16.4.4 RTC预分频器余数寄存器(RTC_DIVH / RTC_DIVL)RTC计数器寄存器(RTC_CNTH / RTC_CNTL) 16.4.6 RTC闹钟寄存器(RTC_ALRH/RTC_ALRL)IWDG寄存器(独立看门狗,用以监督系统硬件的正常运行)键寄存器(IWDG_KR)预分频寄存器(IWDG_PR)重装载寄存器(IWDG_RLR)状态寄存器(IWDG_SR)窗口看门狗(WWDG)寄存器(用以监督软件的正常运行)控制寄存器(WWDG_CR)配置寄存器(WWDG_CFR)状态寄存器(WWDG_SR)FSMC寄存器(可变静态存储控制器)NOR闪存和PSRAM控制器寄存器SRAM/NOR闪存片选控制寄存器1…4 (FSMC_BCR1…4)SRAM/NOR闪存片选时序寄存器1…4 (FSMC_BTR1…4) SRAM/NOR闪存写时序寄存器1…4 (FSMC_BWTR1…4)NAND闪存和PC卡控制器寄存器PC卡/NAND闪存控制寄存器2..4 (FSMC_PCR2..4) FIFO状态和中断寄存器2..4 (FSMC_SR2..4)通用存储空间时序寄存器 2..4 (FSMC_PMEM2..4)属性存储空间时序寄存器 2..4 (FSMC_PATT2..4)I/O空间时序寄存器4 (FSMC_PIO4)ECC结果寄存器2/3 (FSMC_ECCR2/3)SDIO寄存器(数据传输控制器)SDIO电源控制寄存器(SDIO_POWER) SDIO时钟控制寄存器(SDIO_CLKCR) SDIO参数寄存器(SDIO_ARG)SDIO命令寄存器(SDIO_CMD)SDIO命令响应寄存器(SDIO_RESPCMD) SDIO响应1..4寄存器(SDIO_RESPx) SDIO数据定时器寄存器(SDIO_DTIMER) SDIO数据长度寄存器(SDIO_DLEN)SDIO数据控制寄存器(SDIO_DCTRL SDIO数据计数器寄存器(SDIO_DCOUNT) SDIO状态寄存器(SDIO_STA)SDIO清除中断寄存器(SDIO_ICR)SDIO中断屏蔽寄存器(SDIO_MASK)SDIO FIFO计数器寄存器(SDIO_FIFOCNT) SDIO数据FIFO寄存器(SDIO_FIFO)USB寄存器(usb传输控制器)通用寄存器USB控制寄存器(USB_CNTR)USB中断状态寄存器(USB_ISTR)USB帧编号寄存器(USB_FNR)USB设备地址寄存器(USB_DADDR)USB分组缓冲区描述表地址寄存器(USB_BTABLE)端点寄存器USB 端点n寄存器(USB_EPnR), n=[0..7]缓冲区寄存器发送缓冲区地址寄存器n(USB_ADDRn_TX)发送数据字节数寄存器n(USB_COUNTn_TX)接收缓冲区地址寄存器n(USB_ADDRn_RX)接收数据字节数寄存器n(USB_COUNTn_RX)CAN 寄存器(邮箱控制寄存器)CAN控制和状态寄存器CAN主控制寄存器(CAN_MCR)CAN主状态寄存器(CAN_MSR)CAN发送状态寄存器(CAN_TSR)CAN接收FIFO 0寄存器(CAN_RF0R)CAN接收FIFO 1寄存器(CAN_RF1R)CAN中断使能寄存器(CAN_IER)CAN错误状态寄存器(CAN_ESR)CAN位时序寄存器(CAN_BTR)CAN邮箱寄存器发送邮箱标识符寄存器(CAN_TIxR) (x=0..2)发送邮箱数据长度和时间戳寄存器(CAN_TDTxR) (x=0..2)发送邮箱低字节数据寄存器(CAN_TDLxR) (x=0..2)发送邮箱高字节数据寄存器(CAN_TDHxR) (x=0..2)接收FIFO邮箱标识符寄存器(CAN_RIxR) (x=0..1)接收FIFO邮箱数据长度和时间戳寄存器(CAN_RDTxR) (x=0..1)接收FIFO邮箱低字节数据寄存器(CAN_RDLxR) (x=0..1)接收FIFO邮箱高字节数据寄存器(CAN_RDHxR) (x=0..1)CAN过滤器寄存器CAN 过滤器主控寄存器(CAN_FMR)CAN 过滤器模式寄存器(CAN_FM1R)CAN 过滤器位宽寄存器(CAN_FS1R)CAN 过滤器FIFO关联寄存器(CAN_FFA1R)CAN 过滤器激活寄存器(CAN_FA1R)CAN 过滤器组i的寄存器x (CAN_FiRx) (互联产品中i=0..27,其它产品中i=0..13;x=1..2)SPI和I2S寄存器(串行外设接口控制器)SPI控制寄存器1(SPI_CR1)SPI控制寄存器2(SPI_CR2)SPI 状态寄存器(SPI_SR)SPI 数据寄存器(SPI_DR)SPI CRC多项式寄存器(SPI_CRCPR)SPI Rx CRC寄存器(SPI_RXCRCR)SPI Tx CRC寄存器(SPI_TXCRCR)SPI_I2S配置寄存器(SPI_I2S_CFGR)SPI_I2S预分频寄存器(SPI_I2SPR)I2C寄存器(数据传输寄存器)控制寄存器1(I2C_CR1)控制寄存器2(I2C_CR2)自身地址寄存器1(I2C_OAR1)自身地址寄存器2(I2C_OAR2)数据寄存器(I2C_DR)状态寄存器1(I2C_SR1)状态寄存器2 (I2C_SR2)时钟控制寄存器(I2C_CCR)TRISE寄存器(I2C_TRISE)USART寄存器(通用同步异步收发器)状态寄存器(USART_SR)数据寄存器(USART_DR)波特比率寄存器(USART_BRR)控制寄存器1(USART_CR1)控制寄存器2(USART_CR2)控制寄存器3(USART_CR3)保护时间和预分频寄存器(USART_GTPR)OTG_FS控制和状态寄存器(数据传输控制器)OTG_FS全局寄存器OTG_FS控制和状态寄存器(OTG_FS_GOTGCTL)OTG_FS中断寄存器(OTG_FS_GOTGINT)OTG_FS AHB配置寄存器(OTG_FS_GAHBCFG)OTG_FS_USB配置寄存器(OTG_FS_GUSBCFG)OTG_FS复位寄存器(OTG_FS_GRSTCTL)OTG_FS控制器中断寄存器(OTG_FS_GINTSTS)OTG_FS中断屏蔽寄存器(OTG_FS_GINTMSK)OTG_FS接收状态调试读/OTG状态读和POP寄存器(OTG_FS_GRXSTSR / OTG_FS_GRXSTSP)OTG_FS接收FIFO长度寄存器(OTG_FS_GRXFSIZ)OTG_FS非周期性TX FIFO长度寄存器(OTG_FS_GNPTXFSIZ)OTG_FS非周期性TX FIFO/请求队列状态寄存器(OTG_FS_GNPTXSTS)OTG_FS通用控制器配置寄存器(OTG_FS_GCCFG)OTG_FS控制器ID寄存器(OTG_FS_CID)OTG_FS主机周期性发送FIFO长度寄存器(OTG_FS_HPTXFSIZ)OTG_FS设备IN端点发送FIFO长度寄存器(OTG_FS_DIEPTXFx)(其中x是FIFO的编号,x=1…4)主机模式下的寄存器OTG_FS主机模式配置寄存器(OTG_FS_HCFG)OTG_FS主机帧间隔寄存器(OTG_FS_HFIR)OTG_FS主机帧号/帧时间剩余寄存器(OTG_FS_HFNUM)OTG_FS主机周期性发送FIFO/请求队列寄存器(OTG_FS_HPTXSTS)OTG_FS主机所有通道中断寄存器(OTG_FS_HAINT)OTG_FS主机所有通道中断屏蔽寄存器(OTG_FS_HAINTMSK)OTG_FS主机端口控制和状态寄存器(OTG_FS_HPRT)OTG_FS主机通道x特性寄存器(OTG_FS_HCCHARx)(此处x代码通道号,x = 0...7)OTG_FS主机通道x中断寄存器(OTG_FS_HCINTx)(其中x代表通道号,x=0...7,)OTG_FS主机通道x中断屏蔽寄存器(OTG_FS_HCINTMSKx)(其中x为通道号,x=0...7) OTG_FS主机通道x传输长度寄存器(OTG_FS_HCTSIZx)(其中x为通道号,x=0...7)设备模式下的寄存器OTG_FS设备配置寄存器(OTG_FS_DCFG)OTG_FS设备控制寄存器(OTG_FS_DCTL)OTG_FS设备状态寄存器(OTG_FS_DSTS)OTG_FS设备IN端点通用中断屏蔽寄存器(OTG_FS_DIEPMSK)OTG_FS设备OUT端点通用中断屏蔽寄存器(OTG_FS_DOEPMSK)OTG_FS设备所有端点中断寄存器(OTG_FS_DAINT)OTG_FS所有端点中断屏蔽寄存器(OTG_FS_DAINTMSK)OTG_FS设备V BUS放电时间寄存器(OTG_FS_DVBUSDIS)OTG_FS设备V BUS脉冲时间寄存器(OTG_FS_DVBUSPULSE)OTG_FS设备IN端点FIFO空中断屏蔽寄存器(OTG_FS_DIEPEMPMSK)OTG_FS设备控制IN端点0控制寄存器(OTG_FS_DIEPCTL0)OTG设备端点x控制寄存器(OTG_FS_DIEPCTLx)(其中x为端点号,x=1…3)OTG_FS设备控制OUT端点0控制寄存器(OTG_FS_DOEPCTL0)OTG_FS设备OUT端点x控制寄存器(OTG_FS_DOEPCTLx)(其中x为端点号,x=1…3) OTG_FS设备端点x中断寄存器(OTG_FS_DIEPINTx)(其中x为端点号,x=0…3)OTG_FS设备端点x中断寄存器(OTG_FS_DOEPINTx)(其中x为端点号,x=0…3)OTG_FS设备IN端点0传输长度寄存器(OTG_FS_DIEPTSIZ0)OTG_FS设备OUT端点0传输长度寄存器(OTG_FS_DOEPTSIZ0)OTG_FS设备端点x传输长度寄存器(OTG_FS_DIEPTSIZx)(其中x为端点号,x=1…3) OTG_FS设备IN端点传输FIFO状态寄存器(OTG-FS_DTXFSTSx)(其中x为端点号,x=0…3)OTG_FS设备端点x传输长度寄存器(OTG_FS_DOEPTSIZx)(其中x为端点号,x=1…3) OTG_FS电源和时钟门控寄存器(OTG_FS_PCGCCTL)以太网寄存器(通信传输控制器)MAC寄存器以太网MAC设置寄存器(ETH_MACCR)以太网MAC帧过滤器寄存器(ETH_MACFFR)以太网MAC Hash列表高寄存器(ETH_MACHTHR)以太网MAC Hash列表低寄存器(ETH_MACHTLR)以太网MAC MII地址寄存器(ETH_MACMIIAR)以太网MAC MII数据寄存器(ETH_MACMIIDR)以太网MAC流控寄存器(ETH_MACFCR)以太网MAC VLAN标签寄存器(ETH_MACVLANTR)以太网MAC远程唤醒帧过滤器寄存器(ETH_MACRWUFFR)以太网MAC PMT控制和状态寄存器(ETH_MACPMTCSR)以太网MAC中断状态寄存器(ETH_MACSR)以太网MAC中断屏蔽寄存器(ETH_MAIMR)以太网MAC地址0高寄存器(ETH_MACA0HR)以太网MAC地址0低寄存器(ETH_MACA0LR)以太网MAC地址1高寄存器(ETH_MACA1HR)以太网MAC地址1低寄存器(ETH_MACA1LR)以太网MAC地址2高寄存器(ETH_MACA2HR)以太网MAC地址2低寄存器(ETH_MACA2LR)以太网MAC地址3高寄存器(ETH_MACA3HR)以太网MAC地址3低寄存器(ETH_MACA3LR)MMC寄存器以太网MMC控制寄存器(ETH_MMCCR)以太网MMC接收中断寄存器(ETH_MMCRIR)以太网MMC发送中断寄存器(ETH_MMCTIR)以太网MMC接收中断屏蔽寄存器(ETH_MMCRIMR)以太网MMC发送中断屏蔽寄存器(ETH_MMCTIMR)以太网MMC1次冲突后发送”好”帧的计数器寄存器(ETH_MMCTGFSCCR)以太网MMC1次以上冲突后发送”好”帧的计数器寄存器(ETH_MMCTGFMSCCR)以太网MMC发送”好”帧的计数器寄存器(ETH_MMCTGFCR)以太网MMC CRC错误接收帧计数器寄存器(ETH_ MMCRFCECR)以太网MMC对齐错误接收帧计数器寄存器(ETH_ MMCRFAECR)以太网MMC接收帧”好”单播帧计数器寄存器(ETH_ MMCRGUFCR)27.8.3。
stm32f103标准库例程

stm32f103标准库例程一、概述本文档旨在为STM32F103标准库的使用者提供一个完整的例程,帮助初学者快速了解和掌握STM32F103标准库的使用方法。
本例程涵盖了STM32F103标准库的基本概念、常用外设的使用方法以及代码编写规范。
STM32F103标准库是STMicroelectronics公司为STM32F103系列微控制器提供的软件开发库。
该库提供了一系列的嵌入式软件工具和API,简化了STM32F103系列微控制器的软件开发过程,缩短了开发周期。
三、例程内容1. 外设配置及初始化在编写代码之前,需要对STM32F103标准库所支持的外设进行配置和初始化。
本例程将介绍如何配置和初始化常用的外设,如GPIO、UART、SPI、I2C等。
2. 代码编写规范为了提高代码的可读性和可维护性,本例程将介绍STM32F103标准库的代码编写规范,包括变量命名规则、注释规范、代码缩进和排版等。
3. 常用函数示例本例程将提供一些常用的函数示例,包括GPIO输出、UART发送和接收、SPI 传输、I2C通信等。
这些示例代码将帮助您更好地理解如何使用STM32F103标准库。
4. 串口通信示例本例程将提供一个串口通信的示例代码,包括串口初始化、数据发送和接收等操作。
通过这个示例,您可以了解如何使用STM32F103标准库实现串口通信功能。
四、代码示例以下是一个简单的STM32F103标准库代码示例,用于控制LED灯的闪烁:```c#include "stm32f10x.h"#include "stm32f10x_std_lib.h"void LED_Init(void) {GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);}void main(void) {LED_Init();while(1) {GPIO_SetBits(GPIOA, GPIO_Pin_0); // 亮起LED灯delay(500); // 延时500msGPIO_ResetBits(GPIOA, GPIO_Pin_0); // 熄灭LED灯delay(500); // 延时500ms}}```五、总结本文档为STM32F103标准库提供了一个完整的例程,涵盖了外设配置及初始化、代码编写规范、常用函数示例以及串口通信示例等内容。
STM32F103R-F030R-F205R-64Pin引脚对比
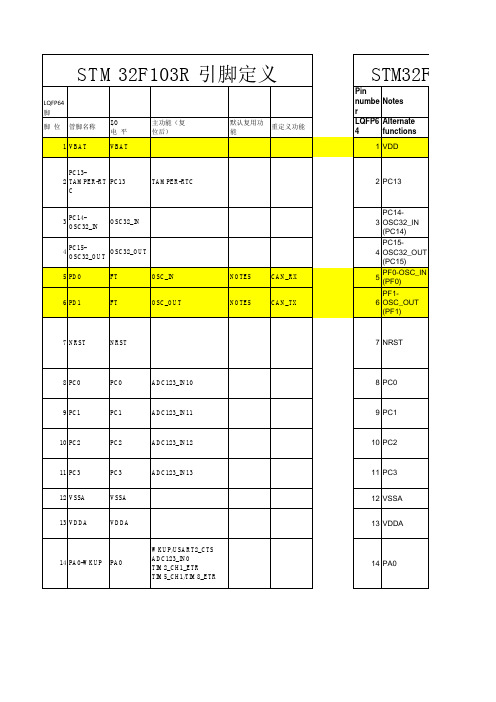
7. 表 中的 引脚 PA0 对 应的 复用 功能 中的 TIM2_ CH1_E TR , 表示 可
7. After reset, these pins are configur ed as SWDIO and SWCLK alternat e function s, and the internal pull-up on SWDIO pin
3. This feature is availabl e on STM32 F030x8 devices only.
4. For STM32 F030x4/ 6/8 devices only.
5. For STM32 F030xC devices only.
6. On LQFP32 packag e, PB2 and PB8 should be treated as unconn ected pins (even when they are not availabl e on the
packag e, they are not forced to a defined level by hardwar e).
ADC1_I N9,也 可以配 置为 ADC2_I N9。
同样, 表中的 引脚名 称标注 中出现 的 ADC12 3_INx(x 表示 0~3 或 10~13 之间的 整数),
FT
OSC_IN
6 PD1
FT
OSC_OUT
NOTE5
CAN_RX
NOTE5
CAN_TX
7 NRST
NRST
8 PC0
PC0
ADC123_IN10
9 PC1
stm32f103停止模式
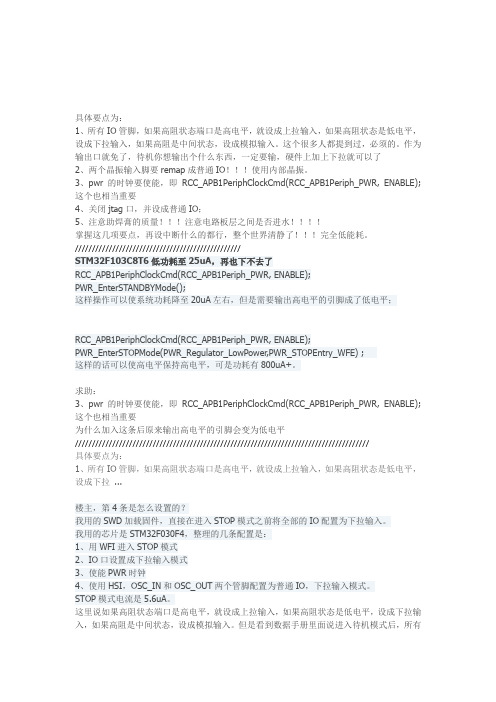
具体要点为:1、所有IO管脚,如果高阻状态端口是高电平,就设成上拉输入,如果高阻状态是低电平,设成下拉输入,如果高阻是中间状态,设成模拟输入。
这个很多人都提到过,必须的。
作为输出口就免了,待机你想输出个什么东西,一定要输,硬件上加上下拉就可以了2、两个晶振输入脚要remap成普通IO!!!使用内部晶振。
3、pwr的时钟要使能,即RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);这个也相当重要4、关闭jtag口,并设成普通IO;5、注意助焊膏的质量!!!注意电路板层之间是否进水!!!!掌握这几项要点,再设中断什么的都行,整个世界清静了!!!完全低能耗。
/////////////////////////////////////////////////STM32F103C8T6低功耗至25uA,再也下不去了RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);PWR_EnterSTANDBYMode();这样操作可以使系统功耗降至20uA左右,但是需要输出高电平的引脚成了低电平;RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);PWR_EnterSTOPMode(PWR_Regulator_LowPower,PWR_STOPEntry_WFE) ;这样的话可以使高电平保持高电平,可是功耗有800uA+。
求助:3、pwr的时钟要使能,即RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);这个也相当重要为什么加入这条后原来输出高电平的引脚会变为低电平///////////////////////////////////////////////////////////////////////////////////////具体要点为:1、所有IO管脚,如果高阻状态端口是高电平,就设成上拉输入,如果高阻状态是低电平,设成下拉 ...楼主,第4条是怎么设置的?我用的SWD加载固件,直接在进入STOP模式之前将全部的IO配置为下拉输入。
STM32f103寄存器说明
CRC寄存器(一种算法,用以确认发送过程中是否出错)数据寄存器:CRC_DR可读写,复位值:0xFFFF FFFF;独立数据寄存器:CRC_IDR临时存放任何8位数据;控制寄存器:CRC_CR只零位可用,用于复位CRC,对其写1复位,由硬件清零;PWR电源控制(控制和管理电源)电源控制寄存器:PWR_CR控制选择系统的电源电源控制/状态寄存器:PWR_CSR睡眠或待机模式电源控制BKP备份寄存器(用以控制和管理备份数据)备份数据寄存器x:BKP_DRx (x = 1 … 10) 10个16位数据寄存器用以存储用户数据RTC时钟校准寄存器:BKP_RTCCR控制实时时钟的运行备份控制寄存器:BKP_CR控制选择清除备份数据的类型备份控制/状态寄存器:BKP_CSR对侵入事件的控制RCC寄存器(时钟的选择、复位、分频)时钟控制寄存器(RCC_CR)各时钟状态显示时钟配置寄存器(RCC_CFGR)时钟分频时钟中断寄存器(RCC_CIR)控制就绪中断使能与否APB2外设复位寄存器(RCC_APB2RSTR) APB1外设复位寄存器(RCC_APB1RSTR) 复位APB各功能寄存器AHB外设时钟使能寄存器(RCC_AHBENR) AHB时钟使能控制APB2外设时钟使能寄存器(RCC_APB2ENR) APB1外设时钟使能寄存器(RCC_APB1ENR) APB1时钟使能控制备份域控制寄存器(RCC_BDCR)备份域时钟控制控制/状态寄存器(RCC_CSR)复位标志寄存器AHB外设时钟复位寄存器(RCC_AHBRSTR) 复位以太网MAC模块时钟配置寄存器2(RCC_CFGR2)时钟选择与分频GPIO寄存器(设置端口的功能)端口配置低寄存器(GPIOx_CRL) (x=A..E)端口配置高寄存器(GPIOx_CRH) (x=A..E)端口输入数据寄存器(GPIOx_IDR) (x=A..E)只读数据,读出IO口的状态端口输出数据寄存器(GPIOx_ODR) (x=A..E) 可读可写端口位设置/清除寄存器(GPIOx_BSRR) (x=A..E)端口位清除寄存器(GPIOx_BRR) (x=A..E)将某一端口清零端口配置锁定寄存器(GPIOx_LCKR) (x=A..E) 用于保护端口配值AFIO寄存器(将端口重映射到其它端口用以端口的第二功能)事件控制寄存器(AFIO_EVCR)选择时间输出端口与引脚复用重映射和调试I/O配置寄存器(AFIO_MAPR) 各寄存器功能引脚重映射选择外部中断配置寄存器1(AFIO_EXTICR1)外部中断配置寄存器2(AFIO_EXTICR2)外部中断配置寄存器3(AFIO_EXTICR3) 外部中断配置寄存器4(AFIO_EXTICR4) 外部中断引脚重映射选择EXTI 寄存器(外部中断控制器)中断屏蔽寄存器(EXTI_IMR)用于屏蔽或开放某一引脚的中断请求事件屏蔽寄存器(EXTI_EMR)用于屏蔽或开放某一引脚的事件上升沿触发选择寄存器(EXTI_RTSR) 禁止或允许某一引脚的上升沿触发下降沿触发选择寄存器(EXTI_FTSR) 禁止或允许某一引脚的下降沿触发软件中断事件寄存器(EXTI_SWIER) 控制某引脚的软件中断挂起寄存器(EXTI_PR)显示某线的引脚有无触发请求DMA寄存器(脱离cpu的传输模式)DMA中断状态寄存器(DMA_ISR)中断情况标志器DMA中断标志清除寄存器(DMA_IFCR) 手动清除标志位DMA通道x配置寄存器(DMA_CCRx)(x = 1…7)传输控制寄存器DMA通道x传输数量寄存器(DMA_CNDTRx)(x = 1…7)数据传输剩余数量存储器DMA通道x外设地址寄存器(DMA_CPARx)(x = 1…7)设置数据传输外设源或目标地址DMA通道x存储器地址寄存器(DMA_CMARx)(x = 1…7)设置存储器地址ADC寄存器(模数转换器)ADC状态寄存器(ADC_SR)AD转换标志寄存器ADC控制寄存器1(ADC_CR1)ADC控制寄存器2(ADC_CR2)设置AD转换的各种功能ADC采样时间寄存器1(ADC_SMPR1)ADC采样时间寄存器2(ADC_SMPR2)某通道选择固定的采样时间ADC注入通道数据偏移寄存器x (ADC_JOFRx)(x=1..4) 设置数据偏移量ADC看门狗高阀值寄存器(ADC_HTR)设置模拟看门狗的阀值高限ADC看门狗低阀值寄存器(ADC_LRT)设置模拟看门狗的阀值低限ADC规则序列寄存器1(ADC_SQR1)ADC规则序列寄存器2(ADC_SQR2)ADC规则序列寄存器3(ADC_SQR3)设置ADC顺序ADC注入序列寄存器(ADC_JSQR)ADC 注入数据寄存器x (ADC_JDRx) (x= 1..4)ADC数据结果寄存器ADC规则数据寄存器(ADC_DR)DAC寄存器(数模转换器)DAC控制寄存器(DAC_CR)DAC软件触发寄存器(DAC_SWTRIGR)DAC通道1的12位右对齐数据保持寄存器(DAC_DHR12R1) DAC通道1的12位左对齐数据保持寄存器(DAC_DHR12L1) DAC通道1的8位右对齐数据保持寄存器(DAC_DHR8R1) DAC通道2的12位右对齐数据保持寄存器(DAC_DHR12R2) DAC通道2的12位左对齐数据保持寄存器(DAC_DHR12L2) DAC通道2的8位右对齐数据保持寄存器(DAC_DHR8R2)双DAC的12位右对齐数据保持寄存器(DAC_DHR12RD)双DAC的12位左对齐数据保持寄存器(DAC_DHR12LD)双DAC的8位右对齐数据保持寄存器(DAC_DHR8RD) DAC通道1数据输出寄存器(DAC_DOR1)DAC通道2数据输出寄存器(DAC_DOR2)TIM1和TIM8寄存器(高级的定时计数寄存器)TIM1和TIM8控制寄存器1(TIMx_CR1)TIM1和TIM8控制寄存器2(TIMx_CR2)TIM1和TIM8从模式控制寄存器(TIMx_SMCR)TIM1和TIM8 DMA/中断使能寄存器(TIMx_DIER) TIM1和TIM8状态寄存器(TIMx_SR)TIM1和TIM8事件产生寄存器(TIMx_EGR)TIM1和TIM8捕获/比较模式寄存器1(TIMx_CCMR1) TIM1和TIM8捕获/比较模式寄存器2(TIMx_CCMR2) TIM1和TIM8捕获/比较使能寄存器(TIMx_CCER) TIM1和TIM8计数器(TIMx_CNT)TIM1和TIM8预分频器(TIMx_PSC)TIM1和TIM8自动重装载寄存器(TIMx_ARR)TIM1和TIM8重复计数寄存器(TIMx_RCR)TIM1和TIM8捕获/比较寄存器1(TIMx_CCR1)TIM1和TIM8捕获/比较寄存器2(TIMx_CCR2)TIM1和TIM8捕获/比较寄存器3(TIMx_CCR3)TIM1和TIM8捕获/比较寄存器(TIMx_CCR4)TIM1和TIM8刹车和死区寄存器(TIMx_BDTR)TIM1和TIM8 DMA控制寄存器(TIMx_DCR)TIM1和TIM8连续模式的DMA地址(TIMx_DMAR)TIMx寄存器(控制定时器)控制寄存器1(TIMx_CR1)控制寄存器2(TIMx_CR2)从模式控制寄存器(TIMx_SMCR)DMA/中断使能寄存器(TIMx_DIER)状态寄存器(TIMx_SR)事件产生寄存器(TIMx_EGR)捕获/比较模式寄存器1(TIMx_CCMR1)捕获/比较模式寄存器2(TIMx_CCMR2)捕获/比较使能寄存器(TIMx_CCER)计数器(TIMx_CNT)预分频器(TIMx_PSC)自动重装载寄存器(TIMx_ARR)捕获/比较寄存器1(TIMx_CCR1)捕获/比较寄存器2(TIMx_CCR2)捕获/比较寄存器3(TIMx_CCR3)捕获/比较寄存器4(TIMx_CCR4)DMA控制寄存器(TIMx_DCR)连续模式的DMA地址(TIMx_DMAR)TIM6和TIM7寄存器(基本定时计数器)TIM6和TIM7控制寄存器1(TIMx_CR1)TIM6和TIM7控制寄存器2(TIMx_CR2)TIM6和TIM7 DMA/中断使能寄存器(TIMx_DIER)TIM6和TIM7状态寄存器(TIMx_SR)TIM6和TIM7事件产生寄存器(TIMx_EGR)TIM6和TIM7计数器(TIMx_CNT)TIM6和TIM7预分频器(TIMx_PSC)TIM6和TIM7自动重装载寄存器(TIMx_ARR)RTC寄存器(实时时钟)RTC控制寄存器高位(RTC_CRH)RTC控制寄存器低位(RTC_CRL)16.4.3 RTC预分频装载寄存器(RTC_PRLH/RTC_PRLL) 16.4.4 RTC预分频器余数寄存器(RTC_DIVH / RTC_DIVL)RTC计数器寄存器(RTC_CNTH / RTC_CNTL) 16.4.6 RTC闹钟寄存器(RTC_ALRH/RTC_ALRL)IWDG寄存器(独立看门狗,用以监督系统硬件的正常运行)键寄存器(IWDG_KR)预分频寄存器(IWDG_PR)重装载寄存器(IWDG_RLR)状态寄存器(IWDG_SR)窗口看门狗(WWDG)寄存器(用以监督软件的正常运行)控制寄存器(WWDG_CR)配置寄存器(WWDG_CFR)状态寄存器(WWDG_SR)FSMC寄存器(可变静态存储控制器)NOR闪存和PSRAM控制器寄存器SRAM/NOR闪存片选控制寄存器1…4 (FSMC_BCR1…4)SRAM/NOR闪存片选时序寄存器1…4 (FSMC_BTR1…4) SRAM/NOR闪存写时序寄存器1…4 (FSMC_BWTR1…4)NAND闪存和PC卡控制器寄存器PC卡/NAND闪存控制寄存器2..4 (FSMC_PCR2..4) FIFO状态和中断寄存器2..4 (FSMC_SR2..4)通用存储空间时序寄存器 2..4 (FSMC_PMEM2..4)属性存储空间时序寄存器 2..4 (FSMC_PATT2..4)I/O空间时序寄存器4 (FSMC_PIO4)ECC结果寄存器2/3 (FSMC_ECCR2/3)SDIO寄存器(数据传输控制器)SDIO电源控制寄存器(SDIO_POWER) SDIO时钟控制寄存器(SDIO_CLKCR) SDIO参数寄存器(SDIO_ARG)SDIO命令寄存器(SDIO_CMD)SDIO命令响应寄存器(SDIO_RESPCMD) SDIO响应1..4寄存器(SDIO_RESPx) SDIO数据定时器寄存器(SDIO_DTIMER) SDIO数据长度寄存器(SDIO_DLEN)SDIO数据控制寄存器(SDIO_DCTRL SDIO数据计数器寄存器(SDIO_DCOUNT) SDIO状态寄存器(SDIO_STA)SDIO清除中断寄存器(SDIO_ICR)SDIO中断屏蔽寄存器(SDIO_MASK)SDIO FIFO计数器寄存器(SDIO_FIFOCNT) SDIO数据FIFO寄存器(SDIO_FIFO)USB寄存器(usb传输控制器)通用寄存器USB控制寄存器(USB_CNTR)USB中断状态寄存器(USB_ISTR)USB帧编号寄存器(USB_FNR)USB设备地址寄存器(USB_DADDR)USB分组缓冲区描述表地址寄存器(USB_BTABLE)端点寄存器USB 端点n寄存器(USB_EPnR), n=[0..7]缓冲区寄存器发送缓冲区地址寄存器n(USB_ADDRn_TX)发送数据字节数寄存器n(USB_COUNTn_TX)接收缓冲区地址寄存器n(USB_ADDRn_RX)接收数据字节数寄存器n(USB_COUNTn_RX)CAN 寄存器(邮箱控制寄存器)CAN控制和状态寄存器CAN主控制寄存器(CAN_MCR)CAN主状态寄存器(CAN_MSR)CAN发送状态寄存器(CAN_TSR)CAN接收FIFO 0寄存器(CAN_RF0R)CAN接收FIFO 1寄存器(CAN_RF1R)CAN中断使能寄存器(CAN_IER)CAN错误状态寄存器(CAN_ESR)CAN位时序寄存器(CAN_BTR)CAN邮箱寄存器发送邮箱标识符寄存器(CAN_TIxR) (x=0..2)发送邮箱数据长度和时间戳寄存器(CAN_TDTxR) (x=0..2)发送邮箱低字节数据寄存器(CAN_TDLxR) (x=0..2)发送邮箱高字节数据寄存器(CAN_TDHxR) (x=0..2)接收FIFO邮箱标识符寄存器(CAN_RIxR) (x=0..1)接收FIFO邮箱数据长度和时间戳寄存器(CAN_RDTxR) (x=0..1)接收FIFO邮箱低字节数据寄存器(CAN_RDLxR) (x=0..1)接收FIFO邮箱高字节数据寄存器(CAN_RDHxR) (x=0..1)CAN过滤器寄存器CAN 过滤器主控寄存器(CAN_FMR)CAN 过滤器模式寄存器(CAN_FM1R)CAN 过滤器位宽寄存器(CAN_FS1R)CAN 过滤器FIFO关联寄存器(CAN_FFA1R)CAN 过滤器激活寄存器(CAN_FA1R)CAN 过滤器组i的寄存器x (CAN_FiRx) (互联产品中i=0..27,其它产品中i=0..13;x=1..2)SPI和I2S寄存器(串行外设接口控制器)SPI控制寄存器1(SPI_CR1)SPI控制寄存器2(SPI_CR2)SPI 状态寄存器(SPI_SR)SPI 数据寄存器(SPI_DR)SPI CRC多项式寄存器(SPI_CRCPR)SPI Rx CRC寄存器(SPI_RXCRCR)SPI Tx CRC寄存器(SPI_TXCRCR)SPI_I2S配置寄存器(SPI_I2S_CFGR)SPI_I2S预分频寄存器(SPI_I2SPR)I2C寄存器(数据传输寄存器)控制寄存器1(I2C_CR1)控制寄存器2(I2C_CR2)自身地址寄存器1(I2C_OAR1)自身地址寄存器2(I2C_OAR2)数据寄存器(I2C_DR)状态寄存器1(I2C_SR1)状态寄存器2 (I2C_SR2)时钟控制寄存器(I2C_CCR)TRISE寄存器(I2C_TRISE)USART寄存器(通用同步异步收发器)状态寄存器(USART_SR)数据寄存器(USART_DR)波特比率寄存器(USART_BRR)控制寄存器1(USART_CR1)控制寄存器2(USART_CR2)控制寄存器3(USART_CR3)保护时间和预分频寄存器(USART_GTPR)OTG_FS控制和状态寄存器(数据传输控制器)OTG_FS全局寄存器OTG_FS控制和状态寄存器(OTG_FS_GOTGCTL)OTG_FS中断寄存器(OTG_FS_GOTGINT)OTG_FS AHB配置寄存器(OTG_FS_GAHBCFG)OTG_FS_USB配置寄存器(OTG_FS_GUSBCFG)OTG_FS复位寄存器(OTG_FS_GRSTCTL)OTG_FS控制器中断寄存器(OTG_FS_GINTSTS)OTG_FS中断屏蔽寄存器(OTG_FS_GINTMSK)OTG_FS接收状态调试读/OTG状态读和POP寄存器(OTG_FS_GRXSTSR / OTG_FS_GRXSTSP)OTG_FS接收FIFO长度寄存器(OTG_FS_GRXFSIZ)OTG_FS非周期性TX FIFO长度寄存器(OTG_FS_GNPTXFSIZ)OTG_FS非周期性TX FIFO/请求队列状态寄存器(OTG_FS_GNPTXSTS)OTG_FS通用控制器配置寄存器(OTG_FS_GCCFG)OTG_FS控制器ID寄存器(OTG_FS_CID)OTG_FS主机周期性发送FIFO长度寄存器(OTG_FS_HPTXFSIZ)OTG_FS设备IN端点发送FIFO长度寄存器(OTG_FS_DIEPTXFx)(其中x是FIFO的编号,x=1…4)主机模式下的寄存器OTG_FS主机模式配置寄存器(OTG_FS_HCFG)OTG_FS主机帧间隔寄存器(OTG_FS_HFIR)OTG_FS主机帧号/帧时间剩余寄存器(OTG_FS_HFNUM)OTG_FS主机周期性发送FIFO/请求队列寄存器(OTG_FS_HPTXSTS)OTG_FS主机所有通道中断寄存器(OTG_FS_HAINT)OTG_FS主机所有通道中断屏蔽寄存器(OTG_FS_HAINTMSK)OTG_FS主机端口控制和状态寄存器(OTG_FS_HPRT)OTG_FS主机通道x特性寄存器(OTG_FS_HCCHARx)(此处x代码通道号,x = 0...7)OTG_FS主机通道x中断寄存器(OTG_FS_HCINTx)(其中x代表通道号,x=0...7,)OTG_FS主机通道x中断屏蔽寄存器(OTG_FS_HCINTMSKx)(其中x为通道号,x=0...7) OTG_FS主机通道x传输长度寄存器(OTG_FS_HCTSIZx)(其中x为通道号,x=0...7)设备模式下的寄存器OTG_FS设备配置寄存器(OTG_FS_DCFG)OTG_FS设备控制寄存器(OTG_FS_DCTL)OTG_FS设备状态寄存器(OTG_FS_DSTS)OTG_FS设备IN端点通用中断屏蔽寄存器(OTG_FS_DIEPMSK)OTG_FS设备OUT端点通用中断屏蔽寄存器(OTG_FS_DOEPMSK)OTG_FS设备所有端点中断寄存器(OTG_FS_DAINT)OTG_FS所有端点中断屏蔽寄存器(OTG_FS_DAINTMSK)OTG_FS设备V BUS放电时间寄存器(OTG_FS_DVBUSDIS)OTG_FS设备V BUS脉冲时间寄存器(OTG_FS_DVBUSPULSE)OTG_FS设备IN端点FIFO空中断屏蔽寄存器(OTG_FS_DIEPEMPMSK)OTG_FS设备控制IN端点0控制寄存器(OTG_FS_DIEPCTL0)OTG设备端点x控制寄存器(OTG_FS_DIEPCTLx)(其中x为端点号,x=1…3)OTG_FS设备控制OUT端点0控制寄存器(OTG_FS_DOEPCTL0)OTG_FS设备OUT端点x控制寄存器(OTG_FS_DOEPCTLx)(其中x为端点号,x=1…3) OTG_FS设备端点x中断寄存器(OTG_FS_DIEPINTx)(其中x为端点号,x=0…3)OTG_FS设备端点x中断寄存器(OTG_FS_DOEPINTx)(其中x为端点号,x=0…3)OTG_FS设备IN端点0传输长度寄存器(OTG_FS_DIEPTSIZ0)OTG_FS设备OUT端点0传输长度寄存器(OTG_FS_DOEPTSIZ0)OTG_FS设备端点x传输长度寄存器(OTG_FS_DIEPTSIZx)(其中x为端点号,x=1…3) OTG_FS设备IN端点传输FIFO状态寄存器(OTG-FS_DTXFSTSx)(其中x为端点号,x=0…3)OTG_FS设备端点x传输长度寄存器(OTG_FS_DOEPTSIZx)(其中x为端点号,x=1…3) OTG_FS电源和时钟门控寄存器(OTG_FS_PCGCCTL)以太网寄存器(通信传输控制器)MAC寄存器以太网MAC设置寄存器(ETH_MACCR)以太网MAC帧过滤器寄存器(ETH_MACFFR)以太网MAC Hash列表高寄存器(ETH_MACHTHR)以太网MAC Hash列表低寄存器(ETH_MACHTLR)以太网MAC MII地址寄存器(ETH_MACMIIAR)以太网MAC MII数据寄存器(ETH_MACMIIDR)以太网MAC流控寄存器(ETH_MACFCR)以太网MAC VLAN标签寄存器(ETH_MACVLANTR)以太网MAC远程唤醒帧过滤器寄存器(ETH_MACRWUFFR)以太网MAC PMT控制和状态寄存器(ETH_MACPMTCSR)以太网MAC中断状态寄存器(ETH_MACSR)以太网MAC中断屏蔽寄存器(ETH_MAIMR)以太网MAC地址0高寄存器(ETH_MACA0HR)以太网MAC地址0低寄存器(ETH_MACA0LR)以太网MAC地址1高寄存器(ETH_MACA1HR)以太网MAC地址1低寄存器(ETH_MACA1LR)以太网MAC地址2高寄存器(ETH_MACA2HR)以太网MAC地址2低寄存器(ETH_MACA2LR)以太网MAC地址3高寄存器(ETH_MACA3HR)以太网MAC地址3低寄存器(ETH_MACA3LR)MMC寄存器以太网MMC控制寄存器(ETH_MMCCR)以太网MMC接收中断寄存器(ETH_MMCRIR)以太网MMC发送中断寄存器(ETH_MMCTIR)以太网MMC接收中断屏蔽寄存器(ETH_MMCRIMR)以太网MMC发送中断屏蔽寄存器(ETH_MMCTIMR)以太网MMC1次冲突后发送”好”帧的计数器寄存器(ETH_MMCTGFSCCR)以太网MMC1次以上冲突后发送”好”帧的计数器寄存器(ETH_MMCTGFMSCCR)以太网MMC发送”好”帧的计数器寄存器(ETH_MMCTGFCR)以太网MMC CRC错误接收帧计数器寄存器(ETH_ MMCRFCECR)以太网MMC对齐错误接收帧计数器寄存器(ETH_ MMCRFAECR)以太网MMC接收帧”好”单播帧计数器寄存器(ETH_ MMCRGUFCR)27.8. 3。
stm32f103中文手册[7]
![stm32f103中文手册[7]](https://img.taocdn.com/s3/m/38586d2658eef8c75fbfc77da26925c52cc59127.png)
stm32f103中文手册1. 概述stm32f103是一款高性能、低功耗、高集成度的32位微控制器,基于ARM Cortex-M3内核,支持Thumb-2指令集,具有72MHz的主频和64KB至512KB的闪存。
stm32f103具有丰富的外设资源,包括多种通信接口、定时器、模数转换器、DMA控制器、触摸感应控制器等,能够满足各种复杂的应用需求。
stm32f103还具有多种低功耗模式,能够实现动态电源管理,降低系统功耗。
stm32f1 03采用多种封装形式,适用于不同的应用场合。
2. 引脚定义stm32f103的引脚定义如图1所示。
stm32f103的引脚分为四类:电源引脚、复位引脚、晶振引脚和功能引脚。
电源引脚包括VDD、VSS、V DDA和VSSA,分别提供数字电源、数字地、模拟电源和模拟地。
复位引脚包括NRST和BOOT0,分别用于复位芯片和选择启动模式。
晶振引脚包括OSC_IN和OSC_OUT,分别连接外部晶振的输入和输出端。
功能引脚包括多达80个可编程的通用输入输出(GPIO)引脚,以及一些专用功能引脚,如JTAG/SWD调试接口、USB接口等。
图1 stm32f103引脚定义3. 系统架构ARM Cortex-M3内核:是stm32f103的核心部分,负责执行程序指令,处理数据和中断等。
存储器:包括闪存(Flash)、静态随机存储器(SRAM)和备份寄存器(Backupregisters),分别用于存储程序代码、数据和备份数据等。
外设总线:包括总线矩阵(Bus matrix)、总线桥(Bus bridge)和外设总线(Peripheralbus),分别用于连接内核、存储器和外设等。
时钟和复位控制:包括时钟树(Clocktree)、复位控制器(Reset controller)和电源管理单元(Power managementunit),分别用于提供时钟信号、复位信号和电源管理等。
STM32F103使用TIM3产生四路PWM

STM32F103使⽤TIM3产⽣四路PWMSTM32F103 使⽤TIM3产⽣四路PWM程序如下:/******************************************************************************** 程序说明 : 思路PWM波⽣成函数* 函数功能 : 使⽤TIM3的PWM功能⽣成思路PWM,* 输⼊ : ⽆* 输出 : 四路PWM,通过GPIO引脚复⽤,对TIM3的四个输出通道引脚重映射为PC6、PC7、PC8、PC9*******************************************************************************/#include"stm32f10x.h"void RCC_Cfg(void);void GPIO_Cfg(void);void TIM_Cfg(void);void NVIC_Cfg(void);void delay_ms(u32 i);void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4);int main(){u8 flag = 1;float ooo=0.5;RCC_Cfg();NVIC_Cfg();GPIO_Cfg();TIM_Cfg();//开启定时器2TIM_Cmd(TIM3,ENABLE);//呼吸灯while(1){PWM_Cfg(ooo,10,50+0.5*ooo,200-2*ooo);if(flag == 1){ooo=ooo+0.002;}if(flag == 0){ooo=ooo-0.002;}if(ooo>100){flag = 0;}if(ooo<0.5){flag = 1;}}}void GPIO_Cfg(void){GPIO_InitTypeDef GPIO_InitStructure;//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);//全部映射,将TIM3_CH2映射到PB5//根据STM32中⽂参考⼿册2010中第第119页可知://当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB1//当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB1//当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9//也即是说,完全重映射之后,四个通道的PWM输出引脚分别为PC6,PC7,PC8,PC9,我们⽤到了通道1和通道2,所以对应引脚为PC6,PC7,PC8,PC9,我们⽤到了通道1和通道2,所以对应引脚为 GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);//部分重映射的参数//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//设置PC6、PC7、PC8、PC9为复⽤输出,输出4路PWMGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;GPIO_Init(GPIOC,&GPIO_InitStructure);}void TIM_Cfg(void){//定义结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//重新将Timer设置为缺省值TIM_DeInit(TIM3);//采⽤内部时钟给TIM2提供时钟源TIM_InternalClockConfig(TIM3);//预分频系数为0,即不进⾏预分频,此时TIMER的频率为72MHzre.TIM_Prescaler =0;TIM_TimeBaseStructure.TIM_Prescaler = 0;//设置计数溢出⼤⼩,每计20000个数就产⽣⼀个更新事件TIM_TimeBaseStructure.TIM_Period = 7200 - 1;//设置时钟分割TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置计数器模式为向上计数模式TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//将配置应⽤到TIM2中TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);//清除溢出中断标志//TIM_ClearFlag(TIM2, TIM_FLAG_Update);//禁⽌ARR预装载缓冲器//TIM_ARRPreloadConfig(TIM2, DISABLE);//开启TIM2的中断//TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);}/******************************************************************************** 函数名 : PWM波产⽣配置函数* 函数功能 : PWM_Cfg* 输⼊ : dutyfactor 占空⽐数值,⼤⼩从0.014到100* 输出 : ⽆*******************************************************************************/void PWM_Cfg(float dutyfactor1,float dutyfactor2,float dutyfactor3,float dutyfactor4){TIM_OCInitTypeDef TIM_OCInitStructure;//设置缺省值TIM_OCStructInit(&TIM_OCInitStructure);//TIM3的CH1输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor1 * 7200 / 100;TIM_OC1Init(TIM3, &TIM_OCInitStructure);//TIM3的CH2输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor2 * 7200 / 100;TIM_OC2Init(TIM3, &TIM_OCInitStructure);//TIM3的CH3输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor3 * 7200 / 100;TIM_OC3Init(TIM3, &TIM_OCInitStructure);//TIM3的CH4输出TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置是PWM模式还是⽐较模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能,使能PWM输出到端⼝ TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置极性是⾼还是低//设置占空⽐,占空⽐=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%TIM_OCInitStructure.TIM_Pulse = dutyfactor4 * 7200 / 100;TIM_OC4Init(TIM3, &TIM_OCInitStructure);//使能输出状态TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设置TIM3的PWM输出为使能TIM_CtrlPWMOutputs(TIM3,ENABLE);}void NVIC_Cfg(void){//定义结构体NVIC_InitTypeDef NVIC_InitStructure;//选择中断分组1NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//选择TIM2的中断通道NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//抢占式中断优先级设置为0NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//响应式中断优先级设置为0NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;//使能中断NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}void RCC_Cfg(void){//定义错误状态变量ErrorStatus HSEStartUpStatus;//将RCC寄存器重新设置为默认值RCC_DeInit();//打开外部⾼速时钟晶振RCC_HSEConfig(RCC_HSE_ON);//等待外部⾼速时钟晶振⼯作HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){//设置AHB时钟(HCLK)为系统时钟RCC_HCLKConfig(RCC_SYSCLK_Div1);//设置⾼速AHB时钟(APB2)为HCLK时钟RCC_PCLK2Config(RCC_HCLK_Div1);//设置低速AHB时钟(APB1)为HCLK的2分频RCC_PCLK1Config(RCC_HCLK_Div2);//设置FLASH代码延时FLASH_SetLatency(FLASH_Latency_2);//使能预取指缓存FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);//设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHzRCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);//使能PLLRCC_PLLCmd(ENABLE);//等待PLL准备就绪while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);//设置PLL为系统时钟源RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);//判断PLL是否是系统时钟while(RCC_GetSYSCLKSource() != 0x08);}//允许TIM2的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//允许GPIO的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO,ENABLE); }void TIM2_IRQHandler(void){u16 aa=10;if(TIM_GetFlagStatus(TIM2,TIM_IT_Update)!=RESET){//清除TIM2的中断待处理位TIM_ClearITPendingBit(TIM2 , TIM_FLAG_Update);TIM_Cmd(TIM2,DISABLE);//通过循环让灯闪烁while (aa){GPIO_SetBits(GPIOC,GPIO_Pin_3);delay_ms(10);GPIO_ResetBits(GPIOC,GPIO_Pin_3);delay_ms(10);aa--;}//使灯的状态为灭GPIO_SetBits(GPIOC,GPIO_Pin_3);TIM_Cmd(TIM2,ENABLE);}}void delay_ms(u32 i){u32 temp;SysTick->LOAD=9000*i; //设置重装数值, 72MHZ时SysTick->CTRL=0X01; //使能,减到零是⽆动作,采⽤外部时钟源SysTick->VAL=0; //清零计数器do{temp=SysTick->CTRL; //读取当前倒计数值}while((temp&0x01)&&(!(temp&(1<<16)))); //等待时间到达SysTick->CTRL=0; //关闭计数器SysTick->VAL=0; //清空计数器}在产⽣PWM时,如果输出引脚已经被使⽤,就要对引脚进⾏重映射,阅读《STM32中⽂参考⼿册2010》第119页可知:对TIM3⽽⾔:1、当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB12、当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB13、当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9为了整齐,我们选择完全重映射,使⽤的函数是:GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);如果想使⽤部分映射,参数⽤GPIO_PartialRemap_TIM3:GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);。
STM32F103芯片CAN总线应用程序
/*******************************************************************---------------------Copyright(a)-----------------------------------作者:日期:修改记录:描述:STM32共有14组过滤器,用以对接收到的帧进行过滤。
每组过滤器包括了2个可配置的32位寄存器:CAN_FxR0和CAN_FxR1。
对于过滤器组,可以将其配置成屏蔽位模式,这样CAN_FxR0中保存的就是标识符匹配值,CAN_FxR1中保存的是屏蔽码,即CAN_FxR1中如果某一位为1,则CAN_FxR0中相应的位必须与收到的帧的标志符中的相应位吻合才能通过过滤器;CAN_FxR1中为0的位表示CAN_FxR0中的相应位可不必与收到的帧进行匹配。
过滤器组还可以被配置成标识符列表模式,此时CAN_FxR0和CAN_FxR1中的都是要匹配的标识符,收到的帧的标识符必须与其中的一个吻合才能通过过滤。
例如:CAN_FilterInitStructure.CAN_FilterNumber=0;//设置第一组过滤器CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//32位CAN_FilterInitStructure.CAN_FilterIdHigh=(0x0635<<5);//接收ID为635的消息11位帧ID 标准帧因此左移5CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0xffff;//CAN_FilterInitStructure.CAN_FilterMaskIdLow=0xffff;CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;//第一组过滤器指向FIFO0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;CAN_FilterInit(&CAN_FilterInitStructure);滤波器配置详细如下:1、对扩展数据帧进行过滤:(只接收扩展数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLo=(((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFF FF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;(注:标准帧数据帧、标准远程帧和扩展远程帧均被过滤)2、对扩展远程帧过滤:(只接收扩展远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_REMOTE)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;3、对标准远程帧过滤:(只接收标准远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_REMOTE)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;4、对标准数据帧过滤:(只接收标准数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_DATA)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;5、对扩展帧进行过滤:(扩展帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;6、对标准帧进行过滤:(标准帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;注:slave_id为要过滤的id号。
stm32f103中文手册[6]
![stm32f103中文手册[6]](https://img.taocdn.com/s3/m/345c353f91c69ec3d5bbfd0a79563c1ec4dad74d.png)
stm32f103中文手册一、概述stm32f103c8/cb:64KB或128KB闪存,20KBSRAM,48引脚或64引脚LQFP封装。
stm32f103r8/rb:64KB或128KB闪存,20KBSRAM,64引脚LQFP封装。
stm32f103v8/vb:64KB或128KB闪存,20KBSRAM,100引脚LQFP封装。
stm32f103rc/rd/re:256KB或384KB或512KB闪存,48KB或64KB SRAM,64引脚或100引脚LQFP封装。
stm32f103vc/vd/ve:256KB或384KB或512KB闪存,48KB或64KB SRAM,100引脚LQFP封装。
stm32f103zc/zd/ze:256KB或384KB或512KB闪存,48KB或64KB SRAM,144引脚LQFP封装。
stm32f103系列的主要特性如下:72MHz的主频,1.25 DMIPS/MHz的性能。
从2.0V到3.6V的工作电压范围。
从-40°C到+85°C的工作温度范围。
多种低功耗模式,包括停机模式、待机模式、睡眠模式和停止模式。
多达7个定时器,包括3个16位通用定时器、1个16位高级定时器、2个基本定时器和1个看门狗定时器。
多达3个同步串行接口(SPI),支持I2S协议。
多达3个通用异步收发器(USART),支持ISO7816协议、LIN协议、IrDA协议和调制解调器控制。
多达2个通用串行总线(USB),支持USB 2.0全速设备和CAN2.0B协议。
多达2个I2C总线接口,支持400KHz的快速模式和10KHz的低速模式。
多达3个12位模数转换器(ADC),支持1.2us的转换时间和多通道扫描模式。
多达2个12位数模转换器(DAC),支持8位和12位的数据格式和双缓冲区输出模式。
多达80个通用输入输出端口(GPIO),支持多种工作模式和中断功能。
多达15个可屏蔽中断源和一个非屏蔽中断源(NMI)。
STM32F103芯片CAN总线应用程序
/*******************************************************************---------------------Copyright(a)-----------------------------------日期:修改记录:描述:STM32共有14组过滤器,用以对接收到的帧进展过滤。
每组过滤器包括了2个可配置的32位存放器:CAN_FxR0和CAN_FxR1。
对于过滤器组,可以将其配置成屏蔽位模式,这样CAN_FxR0中保存的就是标识符匹配值,CAN_FxR1中保存的是屏蔽码,即CAN_FxR1中如果某一位为1,那么CAN_FxR0中相应的位必须与收到的帧的标志符中的相应位吻合才能通过过滤器;CAN_FxR1中为0的位表示CAN_FxR0中的相应位可不必与收到的帧进展匹配。
过滤器组还可以被配置成标识符列表模式,此时CAN_FxR0和CAN_FxR1中的都是要匹配的标识符,收到的帧的标识符必须与其中的一个吻合才能通过过滤。
例如:CAN_FilterInitStructure.CAN_FilterNumber=0;//设置第一组过滤器CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//32位CAN_FilterInitStructure.CAN_FilterIdHigh=(0x0635<<5);//接收ID为635的消息11位帧ID 标准帧因此左移5CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0xffff;//CAN_FilterInitStructure.CAN_FilterMaskIdLow=0xffff;CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;//第一组过滤器指向FIFO0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;CAN_FilterInit(&CAN_FilterInitStructure);滤波器配置详细如下:1、对扩展数据帧进展过滤:(只接收扩展数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLo=(((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFF FF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;(注:标准帧数据帧、标准远程帧和扩展远程帧均被过滤)2、对扩展远程帧过滤:(只接收扩展远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_REMOTE)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;3、对标准远程帧过滤:(只接收标准远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_REMOTE)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;4、对标准数据帧过滤:(只接收标准数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_DATA)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;5、对扩展帧进展过滤:(扩展帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;6、对标准帧进展过滤:(标准帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;注:slave_id为要过滤的id号。
STM32F103 IO口设置模式

flyheart33 发表于 2014-3-7 10:45:46 |只看该作者点评回复 |返回版面.有关推挽输出、开漏输出、复用开漏输出、复用推挽输出以及上拉输入、下拉输入、浮空输入、模拟输入的区别最近在看数据手册的时候,发现在Cortex-M3里,对于GPIO的配置种类有8种之多:(1)GPIO_Mode_AIN 模拟输入(2)GPIO_Mode_IN_FLOATING 浮空输入(3)GPIO_Mode_IPD 下拉输入(4)GPIO_Mode_IPU 上拉输入(5)GPIO_Mode_Out_OD 开漏输出(6)GPIO_Mode_Out_PP 推挽输出(7)GPIO_Mode_AF_OD 复用开漏输出(8)GPIO_Mode_AF_PP 复用推挽输出对于刚入门的新手,我想这几个概念是必须得搞清楚的,平时接触的最多的也就是推挽输出、开漏输出、上拉输入这三种,但一直未曾对这些做过归纳。
因此,在这里做一个总结:推挽输出:可以输出高,低电平,连接数字器件; 推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止。
高低电平由IC的电源低定。
推挽电路是两个参数相同的三极管或MOSFET,以推挽方式存在于电路中,各负责正负半周的波形放大任务,电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小、效率高。
输出既可以向负载灌电流,也可以从负载抽取电流。
推拉式输出级既提高电路的负载能力,又提高开关速度。
详细理解:如图所示,推挽放大器的输出级有两个“臂”(两组放大元件),一个“臂”的电流增加时,另一个“臂”的电流则减小,二者的状态轮流转第 1 页换。
对负载而言,好像是一个“臂”在推,一个“臂”在拉,共同完成电流输出任务。
当输出高电平时,也就是下级负载门输入高电平时,输出端的电流将是下级门从本级电源经VT3拉出。
这样一来,输出高低电平时,VT3 一路和 VT5一路将交替工作,从而减低了功耗,提高了每个管的承受能力。
STM32F103芯片CAN总线应用程序
/*******************************************************************---------------------Copyright(a)-----------------------------------作者:日期:修改记录:描述:STM32共有14组过滤器,用以对接收到的帧进行过滤。
每组过滤器包括了2个可配置的32位寄存器:CAN_FxR0和CAN_FxR1。
对于过滤器组,可以将其配置成屏蔽位模式,这样CAN_FxR0中保存的就是标识符匹配值,CAN_FxR1中保存的是屏蔽码,即CAN_FxR1中如果某一位为1,则CAN_FxR0中相应的位必须与收到的帧的标志符中的相应位吻合才能通过过滤器;CAN_FxR1中为0的位表示CAN_FxR0中的相应位可不必与收到的帧进行匹配。
过滤器组还可以被配置成标识符列表模式,此时CAN_FxR0和CAN_FxR1中的都是要匹配的标识符,收到的帧的标识符必须与其中的一个吻合才能通过过滤。
例如:CAN_FilterInitStructure.CAN_FilterNumber=0;//设置第一组过滤器CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;//屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;//32位CAN_FilterInitStructure.CAN_FilterIdHigh=(0x0635<<5);//接收ID为635的消息11位帧ID 标准帧因此左移5CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0xffff;//CAN_FilterInitStructure.CAN_FilterMaskIdLow=0xffff;CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;//第一组过滤器指向FIFO0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;CAN_FilterInit(&CAN_FilterInitStructure);滤波器配置详细如下:1、对扩展数据帧进行过滤:(只接收扩展数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLo=(((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFF FF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;(注:标准帧数据帧、标准远程帧和扩展远程帧均被过滤)2、对扩展远程帧过滤:(只接收扩展远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT|CAN_RTR_REMOTE)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;3、对标准远程帧过滤:(只接收标准远程帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_REMOTE)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;4、对标准数据帧过滤:(只接收标准数据帧)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD|CAN_RTR_DATA)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFF;5、对扩展帧进行过滤:(扩展帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<3)|CAN_ID_EXT)&0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;6、对标准帧进行过滤:(标准帧不会被过滤掉)CAN_FilterInitStructure.CAN_FilterIdHigh = (((u32)slave_id<<21)&0xffff0000)>>16;CAN_FilterInitStructure.CAN_FilterIdLow = (((u32)slave_id<<21)|CAN_ID_STD)&0xffff;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0xFFFF;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0xFFFC;注:slave_id为要过滤的id号。
J-Link-OB- STM32F103 STM32F103系列MCU的内置调试探针用户指南说明书
J-Link-OB-STM32F103 User guide of the onboard debug probe based on STM32F103 MCUDocument: UM08023Revision: 2Date: June 9, 2022A product of SEGGER Microcontroller GmbHDisclaimerThe information written in this document is assumed to be accurate without guarantee. The information in this manual is subject to change for functional or performance improvements without notice. SEGGER Microcontroller GmbH (SEGGER) assumes no responsibility for any errors or omissions in this document. SEGGER disclaims any warranties or conditions, express, implied or statutory for the fitness of the product for a particular purpose. It is your sole responsibility to evaluate the fitness of the product for any specific use.Copyright noticeYou may not extract portions of this manual or modify the PDF file in any way without the prior written permission of SEGGER. The software described in this document is furnished under a license and may only be used or copied in accordance with the terms of such a license.© 2004-2017 SEGGER Microcontroller GmbH, Monheim am Rhein / GermanyTrademarksNames mentioned in this manual may be trademarks of their respective companies.Brand and product names are trademarks or registered trademarks of their respective holders. Contact addressSEGGER Microcontroller GmbHEcolab-Allee 5D-40789 Monheim am RheinGermanyTel.+49-2173-99312-0Fax.+49-2173-99312-28E-mail:******************Internet:Manual versionsThis manual describes the current version. If you find an error in the manual, please report it to us and we will try to assist you as soon as possible.Contact us for further information on topics that are not yet documented.Print date: June 9, 2022About this documentAssumptionsThis document assumes that you already have a solid knowledge of the following:•The software tools used for building your application (assembler, linker, C compiler).•The C programming language.•The target processor.•DOS command line.If you feel that your knowledge of C is not sufficient, we recommend The C Programming Lan-guage by Kernighan and Richie (ISBN 0--13--1103628), which describes the standard in C pro-gramming and, in newer editions, also covers the ANSI C standard.How to use this manualThis manual explains all the functions and macros that the product offers. It assumes you have a working knowledge of the C language. Knowledge of assembly programming is not required. Typographic conventions for syntaxThis manual uses the following typographic conventions:Style Used forBody Body text.Keyword Text that you enter at the command prompt or that appears on the display (that is system functions, file- or pathnames).Parameter Parameters in API functions.Sample Sample code in program examples.Sample comment Comments in program examples.Reference Reference to chapters, sections, tables and figures or other doc-uments.GUIElement Buttons, dialog boxes, menu names, menu commands. Emphasis Very important sections.Table of contents1Why J-Link OB? (8)2Supported target CPU cores (9)3Supported target interfaces (10)3.1Target interface pins (11)3.2Target interface JTAG (12)3.3Target interface SWD (13)4Compatible MCUs as J-Link OB host (14)5Schematics (15)6Glossary (17)Why J-Link OB?The J-Link on-board (J-Link OB) was designed in order to provide a low-cost, space-saving and on-board alternative to the general J-Link, for eval board manufacturers. J-Link OB can be used with the same software package as the general J-Links and can be used with the same utilities (as far as the feature set of the J-Link OB supports this)Supported target CPU coresFor a list of cores supported by this J-Link OB model, please refer to here:J-Link OB Model overviewSupported target interfacesThe J-Link-OB-STM32F103 supports the following target interfaces:•JTAG•SWD (+ SWO)It may therefore be used for ARM7/9 target CPUs or other target CPUs with JTAG connection or Cortex-M targets with JTAG or Serial Wire Debug connection.The J-Link-OB-STM32F103 provides the following target interface signals:•TCK/SWCLK (PA5 / Pin 15)•TMS/SWDIO (PA7 / Pin 17)•TDI (PA2 / Pin 12)•TDO/SWO (PA10 / Pin 31)•#RESET (PA1 / Pin 11)•nTRST (PA0 / Pin 10)Which signals are required depends on what features shall be supported on the evaluation board. If support for a specific feature or interface is not required, the spare pins should be left open. For more information about which target interface requires which signals, please refer to the following sections.If JTAG support is required on the target hardware to be designed, the following signals need to be connected:•TCK (PA5 / Pin 15)•TMS (PA7 / Pin 17)•TDI (PA2 / Pin 12)•TDO (PA10 / Pin 31)•#RESET (PA1 / Pin 11)•nTRST (PA0 / Pin 10)If SWD (+ optional SWO) support is required on the target hardware to be designed, the following signals need to be connected:•SWCLK (PA5 / Pin 15)•SWDIO (PA7 / Pin 17)•SWO (PA10 / Pin 31)•#RESET (PA1 / Pin 11)If SWO support is not required (e.g. when the target CPU is Cortex-M0/M0+ based, which does not provide SWO support), the SWO signal can be left open.Compatible MCUs as J-Link OB hostThe J-Link-OB-STM32F103 is based on the ST STM32 F103 72 MHz, 128 KB flash, 20 KB RAM series MCUs. The following microcontrollers are compatible to this J-Link OB model:•STM32F103CB (LQFP48, UFQPN48, VFQFPN48)•STM32F103RB (LQFP64, TFBGA64)•STM32F103TB (VFQFPN36)•STM32F103VB (LFBGA100, LQFP100, UFBGA100)Schematics16CHAPTER 5Chapter 6GlossaryThis chapter describes important terms used throughout this manual.Adaptive clockingA technique in which J-Link / J-Trace sends out a clock signal and waits for the returned clock from the target device before generating the next clock pulse. The technique allows the J-Link / J-Trace interface unit to adapt to different signal drive capabilities, different cable lengths and variable target clock speeds. Adaptive clocking can be used when it is supported by the connected target device.RESETAbbreviation of System Reset. The electronic signal which causes the target system other than the TAP controller to be reset. This signal is also known as “nSRST” “nSYSRST”, “nRST”, or “nRESET” in some other manuals. See also nTRST.nTRSTAbbreviation of TAP Reset. The electronic signal that causes the target system TAP controller to be reset. This signal is known as nICERST in some other manuals. See also nSRST. RTCKReturned TCK. The signal which allows Adaptive Clocking.TCKThe electronic clock signal which times data on the TAP data lines TMS, TDI, and TDO. TDIThe electronic signal input to a TAP controller from the data source (upstream). Usually, the TDI signal of J-Link is connected to the TDI of the first TAP controller in a JTAG chain. TDOThe electronic signal output from a TAP controller to the data sink (downstream). Usually, the TDO signal of J-Link is connected to the TDO of the last TAP controller in a JTAG chain. TMSThe electronic signal Test Mode Select is an input to the TAP controller and it is used to select different stages of state machine. It is clocked in into the TAP controller using the TCK signal.(upstream). Usually, the TMS output signal of J-Link is connected to the TMS input of the first TAP controller in a JTAG chain. For Cortex-M CPUs this signal may also be used as the bidirectional data signal SWDIO when the CPU is accessed in serial wire debug mode SWD.SWDA serial communication protocol for Cortex M CPUs which may used for communication with a debug device as an alternative communication channel to JTAG. The SWD communication uses less pins.SWDIOThe bidirectional electronic signal for communication of a Cortex M CPU accessed in serial wire debug mode. Normally, the TMS input pin of the Cortex M CPU is used as SWDIO pin in serial wire mode.SWCLKThe electronic signal which times data on the SWDIO data line used in serial wire debug mode. The SWCLK pin is typically the TCK pin used as JTAG clock input, when JTAG is also supported by the device.SWOThe electronic asynchronous signal for trace data output or SWV output data which may be sent by the application on a Cortex-M CPU running in serial wire debug mode. J-Link-OB-STM32F103 is able to receive the data in asynchronous mode when SWO of the target CPU is connected to the SWOin signal of J-Link-OB-STM32F103. Normally the SWO output signal of a Cortex-M CPU is directed via the TDO signal pin, but may be separated on some devices.。