第2章 指令系统
汇编语言设计复习题(第2章:8086的寻址方式和指令系统)
1、下列指令属于基址加变址寻址方式的是( MOV DX,DS:[BP][SI] )。
DX2、当程序顺序执行时,每取一条指令语句,IP指针增加的值是( D )。
DXA.1 B.2 C.3 D.由指令长度决定的3、下列属于合法的指令是( D ) DXA.MOV DS,ES B.MOV [SI],[DI] C.MOV AX,BL D.MOV [DI],BL4、若AX=349DH,CX=000FH。
则执行指令AND AX,CX后,AX的值是( 000DH )。
DX5、设DS=8225H,DI=3942H,指令NEG BYTE PTR[DI]操作数的物理地址是( 85B92H ) DX6、下列寄存器组中在段内寻址时可以提供偏移地址的寄存器组是( B ) DXA、AX,BX,CX,DXB、BX,BP,SI,DIC、SP,IP,BP,DXD、CS,DS,ES,SS7、对寄存器AX的内容乘以4的正确指令序列是( SHL AX,1 SHL,AX,1 )。
DX8、执行INC指令除对SF、ZF有影响外,还要影响的标志位是( OF,AF,PF )。
DX9、设DH=10H,执行NEG DH指令后,正确的结果是( DH=0F0H CF=1 )。
DX10、下列传送指令中有语法错误的是( A )。
DXA、MOV CS,AXB、MOV DS,AXC、MOV SS,AXD、MOV ES,AX11、下面指令执行后,改变AL寄存器内容的指令是( D )。
DXA、TEST AL,02HB、OR AL,ALC、CMP AL,BLD、AND AL,BL12、执行除法指令后,影响的标志位是( AF,CF,OF,PF,SF,ZF都不确定 )。
DX13、执行下面指令序列后,结果是( AX=0FF82H )。
DXMOV AL,82HCBW14、与MOV BX,OFFSET VAR指令完全等效的指令是( D )。
DXA、MOV BX,VARB、LDS BX,VARC、LES BX,VARD、LEA BX,VAR15、在段定义时,如果定位类型用户未选择,就表示是隐含类型,其隐含类型是( PARA )。
第二章指令系统(1)

通过一个典型例子来分析
关于地址码个数的结论:
对于一般商用处理机,采用多寄存器结构的 二地址指令是最理想的
如果强调硬件结构简单,并且以连续运算 (如求累加和等)为主,宜采用一地址结构
对于以向量、矩阵运算为主的处理机,最好 采用三地址结构。部分RISC处理机也采用三 地址指令
利用Huffman树进行操作码编码
利用Huffman树进行操作码编码
利用Huffman树进行操作码编码
Huffman编码操作码
采用Huffman编码法的操作码平均长度为: (实际长度)
7
H pi li 0.45 1 0.30 2 0.15 3 i 1
确定数据表示的原则
缩短程序的运行时间 减少CPU与主存储器之间的通信量 数据表示的通用性和利用率
数据表示在不断发展
例如:矩阵、树、图、表等已经开始用于数据表示中
将复杂的数据类型用数据表示实现,系统的硬件 成本较高
例1:计算C = A + B,A、B、C均为200×200的 矩阵,分析在一般的计算机上和在向量计算机上 运算的区别
主要定位方式
直接定位方式:
在程序装入主存储器之前,程序中的指令和数据的主 存物理地址就已经确定了的称为直接定位方式
静态定位:
在程序装入主存储器的过程中随机进行地址变换,确 定指令和数据的主存物理地址的称为静态定位方式
动态定位:
在程序执行过程中,当访问到相应的指令或数据时才 进行地址变换,确定指令和数据的主存物理地址的称 为动态定位方式
指令系统的设计必须由软件设计人员和硬 件设计人员共同完成
指令系统发展相当缓慢,需要用软件来填 补的东西就越来越多
微机原理(第二章 指令系统)

2.3 数据传送指令
数据传送类分为四类: 1. 通用传送: ①基本传送指令 MOV ②堆栈操作 ③交换指令 PUSH XCHG POP
2. 累加器专用传送: ①输入/ 输出 ②换码 3. 地址传送 4. 标志传送
2012-8-9
IN XLAT LEA LAHF
OUT
LDS SAHF
LES PUSHF POPF
19
7000 0
2000 1500 73500
CS段
2012-8-9
④ 变址寻址(相对寻址) 变址寻址适用于对一维数组的元素进行操作 ⑴无比例因子 EA=变址寄存器+位移量 16位寻址:SI,DI为基址寄存器, DS为默认段寄存器
32位寻址:除ESP外其余7个32位通用寄存器均可 作为变址寄存器,EBP默认SS为段寄存器,其余均 默认段寄存器为DS
执行后 AL=35H
完成什么功能?
2012-8-9
27
2. 堆栈操作指令 •PUSH 源操作数 进栈指令,先调整堆栈指针(-2), 再把源操作数压栈 PUSH AX PUSH [SI+5] POP 目标操作数 出栈指令,先将栈顶2字节送目标操作数,再调整 堆栈指针(+2) POP [SI+5] POP AX 注: 只能有16位通用寄存器进栈/出栈指令 •PUSHF POPF 16位标志寄存器进栈/出栈指令
2012-8-9 31
2. 减法指令 •SUB 目标操作数, 源操作数 目标操作数-源操作数——>目标操作数 •SBB 目标操作数, 源操作数 目标操作数-源操作数-CF——>目标操作数 •DEC 目标操作数 目标操作数-1——>目标操作数 •NEG 目标操作数 0-目标操作数——>目标操作数 影响A,C,O,P,S,Z 6个标志位 •CMP 目标操作数, 源操作数 只影响标志位,不改变目标操作数
第二章 80868088寻址方式和指令系统
(5)奇偶标志PF
用于反映运算结果中“1”的个数。如果“1”的个数为偶数,则OF被置1,否则OF被清0。
(6)辅助进位标志AF
在字节操作时,如发生低半字节向高半字节进位或借位;在字操作时,如发生低字节向高字 节进位或借位,则辅助进位标志AF被置1,否则AF被清0。
②状态控制标志
(1)方向标志DF
方向标志决定着串操作指令执行时,有关指针寄存器调整方向。 当DF为1时,串操作指令按减方式改变有关的存储器指针值, 当DF为0时,串操作指令按加方式 改变有关的存储器指针值。
其中:存储单元的物理地址是12345H, 标出的:两个重叠段的段值分别是:1002H和1233H, 在对应段内的偏移分别是2325H和0015H。
采用段值和偏移构成逻辑地址后,段值由段寄存器给出,偏移可由指令指针IP、堆栈指针SP 和其他可作为存储器指针使用的寄存器(SI、DI、BX和BP)给出,偏移还可直接用16位数给 出。
图中指令存放在代码段中,OP表示该指令的操作码部分 再例如: MOV AL,5 则指令执行后,(AL)=05H
MOV BX,3064H 则指令执行后, (BX)=3064H
2、寄存器寻址方式
操作数在CPU内部的寄存器中,指令指定寄存器号。
对于16位操作数数,寄存器可以是:
AX、BX、CX、DX、SI、DI、SP和BP等;
指令中不使用物理地址,而是使用逻辑地址,由总线接口单元BIU按需要根据段值和偏移自动 形成20位物理址。
3、段寄存器的引用
由于8086/8088CPU有四个段寄存器,可保存四个段值。所以可同时使用四个段值,但这四个 段有所分工。
在取指令的时候,自动引用代码段寄存器CS,再加上由IP所给出的16位偏移,得到要取指令 的物理地址。
计算机系统结构第2章

计算机系统结构第2章第⼆章指令系统第⼀节指令系统设计概述⼀、指令系统概述1、指令系统的设计、应⽤及实现(1)指令系统的设计*机器指令:计算机硬件实现的运算或操作的命令;第i 种格式:OP i A 1A 2编码⽰例:00110 000~111 000~111功能⽰例:A 1←(A 1)+(A 2)第j 种格式:OP j A 编码⽰例:10110 000~111功能⽰例:A←(A)+1*指令系统设计:定义所有机器指令的格式(含编码)。
*指令系统:所有机器指令的集合;第1种:第2种:…第n 种:OP 1A 1A 2OP 2A OP n A 1A 2…(2)指令系统的应⽤第i种指令应⽤⽰例a:00110 000 001 功能AH←(AH)+(AL)⽰例b:00110 011 000 功能BL←(BL)+(AH)应⽤程序⽰例:从主存地址为2000H开始的100个元素累加求和机器指令格式机器指令程序汇编程序1011wreg data 1011001001100100 CX←1001011100100000000 00100000LP:BX←2000H1011000000000000 AL←0 0000000w mod reg r/m 0000000100000111AL←AL+[BX] 01000reg 01000001 BX←BX+1 11100010 disp 11100010 11111000 LOOP LP*指令系统应⽤:按指令格式要求,根据应⽤需要、编写程序中的指令(即指令格式的实例)。
(3)指令系统的实现指令功能实现步骤—ID 对IR 的OP 译码,⽤输出信号控制某⼀部件⼯作;ID 对IR 的A 译码,⽤输出信号控制相关REG 的读/写;信号有效时间由时序部件及该指令功能实现步骤决定。
指令操作或运算—部件功能实现及数据传递等的组合。
*指令系统实现:按指令格式要求,⽤硬件实现指令功能。
*设计/应⽤实现三者关系:类似C 语⾔设计、⽤C 语⾔编程、C 语⾔编译及执⾏平台!☆指令系统的实质—软件与硬件之间的界⾯(“约定”)!指令译码器ID I OP A 内部总线CPU ID D 功能部件1功能部件n …寄存器1寄存器m…指令寄存器IR :……存储总线MAR/MDR2、指令系统涉及内容(1)指令格式包含信息分析第i种指令格式:OP i A1A2②数据:(A1)=OP i⽀持类型的地址为A1的数据①操作:A1←(A1) OP i(A2) 或A 2←(A2) OP i(A1)硬件⽀持的数据类型(含数据长度)可存放数据部件类型、部件的编址⽅式部件中同⼀数据地址的表⽰⽅式(2)涉及内容*指令集结构:指令集总体框架,如存放部件、寄存器数量;*指令集功能:⽀持操作的类型;*数据表⽰:操作⽀持的数据类型、数据存储格式等。
二指令系统

例如:PC=300H,TBR=01H,AC=02H, 則其跳躍位址的組合规则如下: 位址=PC(bit8~bit 11) TBR AC PC =300H TBR=01H AC=02H 則其跳躍位址: 3 1 2 H
(3) STA 格 式: STA Mx,bbb
功能: 將累加器A内容送給位于bbb段的存储单元
指 令 碼: 00111 1bbb xxx xxxx 进位标志 : 无影响 運 算 式: Mx AC
LDI 20H,05H ;AC=05H,$20H=05H STA 21H,00H ;$21H=05H
指 令 碼: 00011 1bbb xxx xxxx 进位标志 : SUB结果小于0,CY置0(借位) 運 算 式: AC ,MX Mx -AC
将所有的运算 (包括逻辑运算)指令对比
比较加法指令可以发现: ADD-ADDM SUB-SUBM
ADC-ADCM
ADI-ADIM
SBC-SBCM
SBI-SBIM
ST : 堆栈(Stack) TBR: Table Branch Register X : 程式位址 I : 立即值 LDI 20H,0AH 以十六進制 & : 逻辑AND 表示 | : 逻辑OR LDI 20H,10 以十進制表示 ^ : 逻辑EOR LDI 20H,1010B 以2 進制 H : 十六进制 表示 B : 二进制
第一节
指令的分类
SINOWEALTH 单片机共有43条指令,且均 为单字节单周期(机器周期)指令。如果系统时钟 4M,则一条指令时间为1uS,运算值0-FH 1.分类 A、算术运算指令 加法指令:ADD,ADM,ADC,ADCM, ADI,ADIM 减法指令:SUB,SUBM,SBC,SBCM SBI,SBIM 十进制调整指令:DAA,DAS
计算机系统结构 第二章 数据表示与指令系统

缺点:处理速度慢, 需要花费时间在数的浮 加位加1以及因此产生进 位的时间。
19
4)查表舍入法
其方法是基于存储逻辑思想 ,用ROM 或PLA存放下溢 处理表。
优点:集中了上述各种处理方 法的优点,避免了舍入法所需 的相加和进位传输时间。由于 ROM的读出时间比加法时间短, 所以这种查表的速度比较快。 该方法速度快,平均误差可调 节到趋于0
计算机系统结构
第二章数据表示与指令系统
刘超 中国地质大学计算机学院
第二章 数据表示与指令系统
2.1浮点数数据表示(尾数/基值选择、下溢处理) 2.2高级数据表示(自定义、向量、堆栈) 2.3寻址方式与指令格式优化(寻址/定位/优化) 2.4指令系统的两种风格(CISC和RISC)
3
2.1.2引入数据表示的原则
巨的、范大围、大中,个型数机多上,,运rm算宜速取度大快,;这而样小使、可微表型示机的由数 于可表示数范围不要求太大、速度也不要求太高, 尾 取数 值字小长些较。短如,:所以更注重于可表示精度,宜使rm
PDP-11/ Intel X86等,rm=2; IBM 370,rm=16; Burroughs B6700,rm=8
由于表示产生的误差大小就是数的表示精度。当 总的机器字长确定好之后,结构设计者就应该确 定好浮点数表示中p和m的位数,这主要示根据 数的表示范围和精度来定的。
8
阶码采用二进制p位, 尾在数非采负用阶、rm正进尾制数m、′位规, 格化条件下各种浮点数 特性参量的一般式
10
(1)可表示数的范围 随于p可着大以的rm减r的m少的增。大值,,可为表表示示数相的同范范围围增的大数,,换其句阶话码说的位,对数
汇编语言程序设计(第四版)第2章【课后答案】

汇编语言程序设计第四版【课后习题答案】—-囮裑為檤第2章8086的指令系统〔习题2.1〕已知DS=2000H、BX=0100H、SI=0002H,存储单元[20100H]~[20103H]依次存放12 34 56 78H,[21200H]~[21203H]依次存放2A 4C B7 65H,说明下列每条指令执行完后AX寄存器的内容。
(1) mov ax,1200h(2)mov ax,bx(3)mov ax,[1200h](4) mov ax,[bx](5) mov ax,[bx+1100h](6)mov ax,[bx+si](7) mov ax,[bx][si+1100h]〔解答〕(1)AX=1200H(2)AX=0100H(3)AX=4C2AH ;偏移地址=bx=0100h(4)AX=3412H ;偏移地址=bx=0100h(5)AX=4C2AH ;偏移地址=bx+1100h=1200h(6)AX=7856H ;偏移地址=bx+si=0100h+0002h=0102h(7)AX=65B7H ;偏移地址=bx+si+1100h=0100h+0002h+1100h=1202h〔习题2.2〕指出下列指令的错误(1)mov cx,dl(2)mov ip,ax(3) mov es,1234h(4)mov es,ds(5)mov al,300(6)mov [sp],ax(7)mov ax,bx+di(8)mov 20h,ah〔解答〕(1)两操作数类型不匹配(2)IP指令指针禁止用户访问(3)立即数不允许传给段寄存器(4)段寄存器之间不允许传送(5)两操作数类型不匹配(6)目的操作数应为[ SI ](7)源操作数应为[BX+DI](8)立即数不能作目的操作数〔习题2。
3〕已知数字0 ~ 9对应的格雷码依次为:18H、34H、05H、06H、09H、0AH、0CH、11H、12H、14H,它存在于以table为首地址(设为200H)的连续区域中。
51系列单片机指令系统
MOV DPTR,#1000H MOVX A,@DPTR INC DPTR, MOVX @DPTR,A 7、程序存储器向累加器A传送指令 MOVC A,@A+DPTR MOV DPTR,#100H MOV A,R0 MOVC A,@A+DPTR ORG 0100H. DB 0,1,4,9,16,25 8、堆栈操作指令 PUSH direct POP direct 第一条指令称之为入栈指令,就是将direct中的内容 送入堆栈中,第二条指令称之为弹出指令,就是将堆栈 中的内容送回到direct中。
位寻址时,操作数是二进制数的某一位,其位地 址出现在指令中,例如指令 • SETB bit ;(bit) ← l • 51系列单片机可用于位寻址的空间是内部RAM的可 位寻址区和SFR区中的字节地址可以被8整除(即地址以 “0”或“8”结尾)的寄存器所占空间,寻址方式如表 2-2所示。
表2-2 寻址方式一览表
寻 址 方 式
寻 址 范 围
R0-R7 ,DPTR ACC,B,C(CY位)
内部RAM 00H-7FH 特殊功能寄存器 80H-FFH 内部RAM位寻址区 (20H-2FH): 位地址00H-7FH 可寻址的特殊功能寄存器: 位地址 80H-F7H 以数据指针表示操作数 内部RAM 00H-7FH 外部RAM或I/O端口 00H-FFH / 0000H-FFFFH
图2-3 寄存器间接寻址
图2-4 立即寻址
4、立即寻址
•
立即寻址时,指令中直接给出操作数。例如指令 MOV A,#76H ;数据76H送累加器 A。 • 立即数寻址过程如图2-4所示。
5、变址寻址
•
变址寻址时,指定的变址寄存器的内容与指令中 给出的偏移量相加,所得的结果作为操作数的地址。 例如指令MOVC A, @A+DPTR ;((A)+(DPTR))送 A。变址寻址过程如图2-5所示。 不论用DPTR或PC作为基址指针,变址寻址方式都 只适用于51系列单片机的程序存储器,通常用于读取 数据表也就是将程序存储器中的数送入A中。因此也称 为查表指令,常用此指令来查一个已做好在程序存储 器中的表格,这条指令采用变址寻址。
计算机系统结构 第二章自考练习题答案
第二章数据表示与指令系统历年真题精选1. 计算机中优先使用的操作码编码方法是( C )。
A. BCD码B. ASCII码C. 扩展操作码D. 哈夫曼编码=16,除尾符之外的尾数机器位数为8位时,可表示的规格化最大尾2.浮点数尾数基值rm数值为( D )。
A. 1/2B. 15/16C. 1/256D. 255/2563. 自定义数据表示包括(标志符)数据表示和(数据描述符)两类。
4. 引入数据表示的两条基本原则是:一看系统的效率是否有提高;二看数据表示的(通用)性和(利用)率是否高。
5. 简述设计RISC的一般原则。
6. 简述程序的动态再定位的思想。
7. 浮点数表示,阶码用二进制表示,除阶符之外的阶码位数p=3,尾数基值用十进制表示,除尾符外的尾数二进制位数m=8,计算非负阶、规格化、正尾数时,(1)可表示的最小尾数值;(2)可表示的最大值;(3)可表示的尾数个数。
8. (1)要将浮点数尾数下溢处理成K—1位结果,则ROM表的单元数和字长各是多少并简述ROM表各单元所填的内容与其地址之间的规则。
(2)若3位数,其最低位为下溢处理前的附加位,现将其下溢处理成2位结果,设计使下溢处理平均误差接近于零的ROM表,以表明地址单元与其内容的关系。
同步强化练习一.单项选择题。
1. 程序员编写程序时使用的地址是( D )。
A.主存地址 B.有效地址 C.辅存实地址 D.逻辑地址2. 在尾数下溢处理方法中,平均误差最大的是( B )。
A.舍入法 B.截断法 C.恒置“1”法 D.ROM查表法3. 数据表示指的是( C )。
A .应用中要用到的数据元素之间的结构关系B .软件要处理的信息单元之间的结构关系C .机器硬件能识别和引用的数据类型D .高级语言中的数据类型说明语句4. 标志符数据表示中的标志建立由( A )。
A .编译程序完成B .操作系统完成C .高级语言编程时完成D .汇编语言编程时完成5. 堆栈型机器比通用型机器优越的是( C )。
第二章 常用Linux命令 g
chmod 改变文件或目录的访问权限
语法: 语法:chmod 模式 文件或目录名 r-可以看文件的内容。 -可以看文件的内容。 w-可以修改或删除文件,可以在目录中建 -可以修改或删除文件, 立新文件 x-可以执行它,可以从一个目录转到另一个 -可以执行它, 目录。 目录。 用户: 用户:u——文件的拥有者 文件的拥有者 g——文件的所属组
例:以树的形式显示当前目录下的文件和子目录 [test @redflag test]$tree
参数] 目录名—— ——建立目录 mkdir [参数] 目录名——建立目录
-p:建立目录时,如果父目录不存在,则一起建立 例:在当前目录下建立dir1目录 [test @redflag test]$mkdir dir1
o——其他用户 a——代表所有用户(即u+g+o) 举例1:[root @redflag /root]#chmod u=rw,g=rw,o=r chap1.txt 例2:[root @redflag /root]#chmod o+w chap1.txt 例3:[root @redflag /root]#chmod 664 chap1.txt 等同于: [root @redflag /root]#chmod u=rw,g=rw,o=r chap1.txt
删除Sub12以及其下的kde-root 删除R13下的install.log文件 删除R13空文档
5.
6.
7. 8. 9.
链接
链接:是给系统中已有的某个文件指定另外一个可用 于访问它的名称。链接有两种,一种为硬链接(Hard Link),另一种被称为符号链接(Symbolic Link),也 叫软链接( Soft Link )。 硬链接:实际上是为文件建一个别名,链接文件和原 文件实际上是同一个文件。这两个文件的inode号是同 一个,说明它们是同一个文件。更改了一个文件,另 一个的文件长度、内容、更改时间等都将相应发生变 化,更改了一个文件的权限位mode,另一个也会发生 同样的变化。 inode可以转换成存放此文件的具体物理地址(1磁头、 20柱面、30扇区) ,一个inode对应着系统中唯一的一 片物理数据区 语法: ln 源文件 链接名
第2章 指令系统 习题
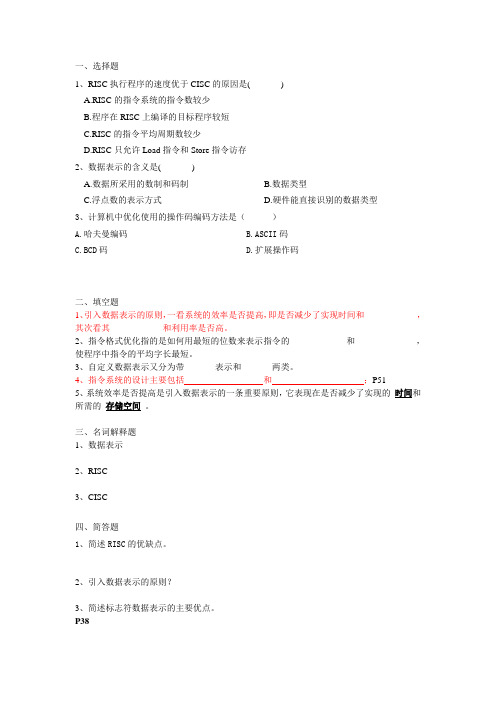
1、RISC执行程序的速度优于CISC的原因是( )A.RISC的指令系统的指令数较少B.程序在RISC上编译的目标程序较短C.RISC的指令平均周期数较少D.RISC只允许Load指令和Store指令访存2、数据表示的含义是( )A.数据所采用的数制和码制B.数据类型C.浮点数的表示方式D.硬件能直接识别的数据类型3、计算机中优化使用的操作码编码方法是()A.哈夫曼编码B.ASCII码C.BCD码D.扩展操作码二、填空题1、引入数据表示的原则,一看系统的效率是否提高,即是否减少了实现时间和____________,其次看其____________和利用率是否高。
2、指令格式优化指的是如何用最短的位数来表示指令的_____________和______________,使程序中指令的平均字长最短。
3、自定义数据表示又分为带_______表示和_______两类。
4、指令系统的设计主要包括和;P515、系统效率是否提高是引入数据表示的一条重要原则,它表现在是否减少了实现的_时间和所需的_存储空间_。
三、名词解释题1、数据表示2、RISC3、CISC四、简答题1、简述RISC的优缺点。
2、引入数据表示的原则?3、简述标志符数据表示的主要优点。
P381、某台计算机有9条指令,其使用频度如下:试分别用Huffman编码(要求画出Huffman树)与“2位--4位”等长扩展码为其编码?并分别计算其平均码长?(注:编码方案不唯一,但各个码的码长是唯一的)2、某模型机有9条指令,其使用频度为ADD(加):30%,SUB(减):24%,JOM(按负转移):6%,STO(存):7%,JMP(转移):7%,SHR(右移):2%,CIL(循环左移):3%,CLA(清加):20%,STP(停机):1%。
试分别用Huffman编码(要求画出Huffman树)和“2位--4位”等长扩展码为其编码。
并分别计算其平均码长?(注:编码方案不唯一,但各个码的码长是唯一的)课后习题:2.10。
计算机系统结构 第 2 章 指令集结构

2.1 指令系统结构的分类
• • • • • • 1. 指令系统分类的准则 ⑴ 在CPU中操作数的存放方法。 ⑵ 在每条指令中,显式指明的操作数个数。 ⑶ 操作数的寻址方式。 ⑷ 指令系统所提供的操作类型。 ⑸ 操作数的类型与大小。
2014-3-8
10
2.指令系统结构的分类
• • • • 按在CPU中操作数的存放方法可分为: ⑴ 堆栈型 ⑵ 累加器型 ⑶ 通用寄存器型
2014-3-8
21
4. 编址单位
• ⑴ 字编址:以访问一次设备所获得的信息量 为单位进行编址。 • ⑵ 字节编址:以字节为单位进行编址。 • ⑶ 位编址:按二进制位编址。
2014-3-8
22
按字节编址时需解决的问题
• ① 多字节数据的存放顺序 • 小端排序:将一个字中的低位字节存放在低地址 单元中。 • 大端排序:将一个字中的高位字节存放在低地址 单元中。 • 小端排序符合从右向左进位的硬件习惯;大端排 序符合程序员从左向右的编程习惯。
• 5. 按地址寻址方式(略,P47)
• 寻址方式的使用频度:
• R寻址->直接->变址->单字位移->自增->R间址->自减 • 高 -------------------------- 低
2014-3-8
26
2.2.2 按内容访问方式
• • • • • 1. 按内容访问方式 按照要访问的数据的内容访问内存。 2. 联想存储器(相联存储器、按内容访问存储器) 满足按内容访问方式的存储器。 联想存储器的主要特点:以并行方式在存储器中 查找所需信息的内容。 • 3. 按内容访问的方法 • 通过硬件将要访问的内容与存储单元的内容进行 比较,若相同,则进行访问。
微机原理第02章(指令系统)2
加法指令:ADD, ADC和INC 减法指令:SUB, SBB, DEC, NEG和CMP 他们分别执行字或字节的加法和减法运算, 除 INC 和 DEC 不影响 CF 标志外,其他按定 义影响全部状态标志位 操作数组合:
运算指令助记符 reg, imm/reg/mem 运算指令助记符 mem, imm/reg
第2章:5. 求补指令NEG(negtive)
4.取补指令 格式:NEG OPRD (OPRAND ) 功能:OPRD取补 (取反加1) 相当0-操作数,所以算入减法; 且一般CF=1(0-肯定有借位), 只有OPRD=0时CF=0
第2章:例题2.9 求补运算
mov ax,0ff64h neg al ;AL=0-64H=9CH,AX=FF9CH ;OF=0, SF=1,ZF=0,PF=1,CF=1 sub al,9dh ;AL=9CH-9DH=FFH,AX=FFFFH ;OF=0,SF=1,ZF=0,PF=1,CF=1 neg ax ;AX=0-FFFFH=0001H ;OF=0,SF=0,ZF=0,PF=0,CF=1 dec al ;AL=01H-1=0,AX=0000H ;OF=0,SF=0,ZF=1,PF=1,CF=1 neg ax ;AX=0-0=0 ;OF=0,SF=0,ZF=1,PF=1,CF=0
第2章:例题2.10 符号扩展
mov al,64h
;AL=64H (机器数) ,表示10进制数100(真值)
cbw
;将符号0扩展,AX=0064H,仍然表示100
mov ax,0ff00h
;AX=FF00H,表示有符号10进制数-256
cwd
;将符号位“1”扩展,DX.AX=FFFFFF00H ;仍然表示-256
第二章 计算机组成原理知识点
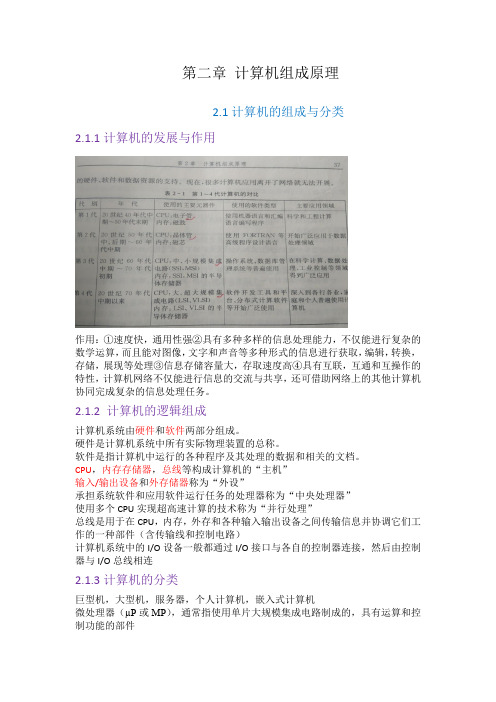
第二章计算机组成原理2.1计算机的组成与分类2.1.1计算机的发展与作用作用:①速度快,通用性强②具有多种多样的信息处理能力,不仅能进行复杂的数学运算,而且能对图像,文字和声音等多种形式的信息进行获取,编辑,转换,存储,展现等处理③信息存储容量大,存取速度高④具有互联,互通和互操作的特性,计算机网络不仅能进行信息的交流与共享,还可借助网络上的其他计算机协同完成复杂的信息处理任务。
2.1.2 计算机的逻辑组成计算机系统由硬件和软件两部分组成。
硬件是计算机系统中所有实际物理装置的总称。
软件是指计算机中运行的各种程序及其处理的数据和相关的文档。
CPU,内存存储器,总线等构成计算机的“主机”输入/输出设备和外存储器称为“外设”承担系统软件和应用软件运行任务的处理器称为“中央处理器”使用多个CPU实现超高速计算的技术称为“并行处理”总线是用于在CPU,内存,外存和各种输入输出设备之间传输信息并协调它们工作的一种部件(含传输线和控制电路)计算机系统中的I/O设备一般都通过I/O接口与各自的控制器连接,然后由控制器与I/O总线相连2.1.3计算机的分类巨型机,大型机,服务器,个人计算机,嵌入式计算机微处理器(µP或MP),通常指使用单片大规模集成电路制成的,具有运算和控制功能的部件SOC:单个集成电路芯片中包含微处理器,存储器,输入/输出控制与接口电路,电子系统模拟电路,数字/模拟混合电路和无线通信使用的射频电路2.2 CPU的结构与原理2.2.1 CPU的作用与组成匈牙利数学家冯·诺依曼的“存储程序控制”原理CPU的根本任务是执行指令CPU的组成:寄存器组(用来临时存放参加运算的数据和运算得到的中间结果),运算器:也称算术逻辑部件(ALU),控制器:指令计数器(用来存放CPU正在执行的指令的地址)和指令寄存器(用来保存当前正在执行的指令)2.2.2 指令与指令系统指令是构成程序对的基本单位,采用二进制表示,指令由操作码和操作数地址组成,CPU所能执行的全部指令称为指令系统2.2.3 CPU的性能指标字长,主频,CPU总线速度,高速缓存的容量与结构,指令系统,逻辑结构,内核个数 TFLOPS(万亿条浮点指令/秒)MIPS(百万条定点指令/秒),MFLOPS(百万条浮点指令/秒)2.3 PC主机的组成2.3.1 主板,芯片组与BIOSCPU芯片和内存条分别通过主板上的CPU插座和存储器插槽安装在主板上,PC机常用外围设备通过扩充卡或I/O接口与主板相连,扩充卡借助卡上的印刷插头插在主板上的PCI总线插槽中主板上还有两块特别有用的集成电路:一块是闪烁存储我,其中存放的是BIOS,它是PC机软件中最基础的部分,没有它机器就无法启动,另一个集成电路芯片是CMOS存储器,其中存放者与计算机系统相关的一些参数(称为配置信息),包括当前的日期和时间,开机口令,已安装的光驱和硬盘的个数及类型等,CMOS 芯片是一种易失性存储器,它由主板上的电池供电,即使计算机关机后它也不会丢失所存储的信息芯片组由北桥芯片(MCH)和南桥芯片(ICH)组成,CPU时钟信号由芯片组提供芯片组还决定了主板上所能安装的内存最大容量,速度及可使用的内存条的类型每次机器加电时,CPU首先执行BIOS程序,它具有诊断计算机故障和加载操作系统并启动其运行的功能BIOS:加电自检程序,引导装入程序,CMOS设置程序,基本外围设备的驱动程序内存储器由称为存储器芯片的半导体集成电路组成,RAM目前多采用MOS型半导体集成电路芯片制成DRAM:电路简单,集成度高,功耗小,成本低SRAM:电路复杂,集成度低,功耗大,成本高每个存储单元都有一个地址,CPU按地址对存储器进行访问存储器的存取时间指的是从CPU给出存储器地址开始到存储器读出数据并送回到CPU所需要的时间解决主存速度慢的方法是:①采用cache存储器②改进存储器芯片的电路与工艺,并对DRAM的存储控制技术进行改进2.3.3 I/O总线与I/O接口CPU芯片与北桥芯片相互连接总线称为CPU总线(前端总线FSB),I/O设备控制器与CPU,存储器之间相互交换信息,传输数据的一组公用信号线称为I/O总线,总线上有三类信号:数据信号,地址信号和控制信号总线带宽(MB/S)=(数据线宽度/8)X总线工作频率(MHZ)X每个总线周期的传输次数PCI-E是PC机I/O总线的一种新标准,采用高速串行传输USB电源(5V,100mA~500Ma) USB3.0的电流是1A2.4常用输入设备扫描仪的性能指标:①扫描仪的光学分辨率:普通家用扫描仪分辨率在1600~3200dpi②色彩位数③扫描幅面④与主机的接口2.5 常用输出设备显示器的刷新频率越高,图像的稳定性越好,响应时间越小越好。
微机原理第02章(寻址方式和传送指令)
有效地址由基址寄存器( BX 或 BP )的内容加上 变址寄存器(SI或DI)的内容构成: 有效地址=BX/BP+SI/DI 段地址对应 BX基址寄存器默认是 DS,对应BP基 址寄存器默认是SS;可用段超越前缀改变
MOV AX, [BX+SI] MOV AX, [BX][SI]
;AX←DS:[BX+SI]
段内偏移量为适应各种数据结构的需要,可以有几个部分组 成,所以也把它称为有效地址EA。
寻址方式不同EA的构成不同。归纳EA可有多种情况构成: 直接寻址,寄存器间接寻址,寄存器相对寻址,
基址加变址寻址,相对址加变址寻址。
寻址方式——如何寻找内存操作数。 不同寻址方式实质上是构成它段内的偏移量的方法不同。
34H 12H
堆 栈 段
...
寄存器间接寻址方式 MOV [BP], AX
3 、用 SI、DI、BX 、BP作为间接寻址允许段跨越
指令中可以指定段跨越前缀来取得其他段中的数据。
例:MOV ES:[DI], AX MOV DX, DS:[BP] 这种寻址方法可以用于表格处理。
第2章 (五)寄存器相对寻址方式(Register relative addressing)或变 址寻址 (Index Addressing)
8位位移量 PA=16d ×(SS)+ (BP) + 16位位移量
例: MOV AX, COUNT [BP] 或MOV AX, [COUNT+BP] 或MOV AX, COUNT+[BP]
AH AL 48H 存储器 OP OP 40H 20H 操 作 码 位移量 COUNT
COUNT为16位位移量。 指令执行前: (SS)=5000H, (BP)=3000H, COUNT=2040H, (AX)=1234H
第02章单片机指令系统与汇编语言程序设计习题解答
第02章单⽚机指令系统与汇编语⾔程序设计习题解答第02章单⽚机指令系统与汇编语⾔程序设计习题解答⼀、填空题1. MCS-51单⽚机指令系统中有 111 条指令。
2. MCS-51单⽚机指令中,Rn表⽰ R0、R1、R2、R3、R4、R5、R6、R7中的⼀个。
3. MCS-51单⽚机指令中,@表⽰间接寻址。
4. MCS-51单⽚机指令中,$表⽰当前指令的⾸地址。
5. MCS-51单⽚机寻址⽅式有⽴即数、直接地址、寄存器、寄存器间接、变址、相对、位寻址等七种寻址⽅式。
6. 指令MOVC A, @A+PC的功能是将A的内容与PC当前值相加作为程序存储器地址,再将该地址单元的内容传送到A 。
7. 指令JBC CY, LOOP是 3 字节、 2 个机器周期指令。
8. 指令DA A的功能是对A中当前值进⾏⼗进制调整。
9. 调⽤⼦程序时,将PC当前值保存到堆栈。
10. MCS-51单⽚机堆栈操作的基本原则是先进后出。
⼆、简答题1. MCS-51单⽚机指令⼀般由哪⼏个部分组成?各部分的功能是什么?答:MCS-51单⽚机指令⼀般由标号、操作码助记符、操作数、注释四部分组成。
标号是⼀条指令的标志,是可选字段,与操作码之间⽤“:”隔开;设置标号的⽬的是为了⽅便调⽤或转移。
标号的选择应遵从下列规定:标号由1~8个字母或数字组成,也可以使⽤⼀个下划线符号“_”。
第⼀个字符必须是字母。
指令助记符或系统中保留使⽤的字符串不能作为标号。
标号后⾯需要有⼀个冒号。
⼀条语句可以有标号,也可以没有标号,取决于程序中其它语句是否需要访问这条语句。
操作码规定指令的功能,是⼀条指令的必备字段,如果没有操作码,就不能成为指令。
它与操作数之间⽤“空格”隔开。
操作数是指令操作的对象。
分为⽬的操作数和源操作数两类,它们之间⽤“,”分隔。
操作数是可选字段。
⼀条指令可以有0、1、2、3个操作数。
注释是对指令功能的说明解释。
以“;”开始。
2. 程序中,伪指令ORG和END的作⽤是什么?答:ORG⽤于定义汇编语⾔源程序或数据块存储的起始地址。
北理工计算机体系结构习题解答
习题解答
1
第1章 基础知识
翻译
先用转换程序将高一级机器级上 的程序整个地变换成低一级机器 级上可运行的等效程序,然后再 在低一级机器级上去实现的技术
2
第1章 基础知识
解释
在低一级机器级上用它的一串语 句或指令来仿真高一级机器上的 一条语句或指令的功能,通过对 高一级机器语言程序中的每条语 句或指令逐条解释来实现的技术
解:
2
1
(1 F ) (F / 20)
F 10 0.53 19
19
1-10 用一台40MHz处理机执行标准测试 程序,它含的混合指令数和相应所需的 时钟周期数如下:
指令类型 指令数 时钟周期数
整数运算 45000
1
数据传送 32000
2
浮点
15000
2
控制传送 8000
2
求有效CPI、MIPS速率和程序的执行时 间。
20
[解答]
C=P(I4=50i0n10(*C1+PI3i2*00IIC0i *)2+15000*2+8000*2)/
(45000+32000+15000+8000) = 1.55周期/指令
速率MIPS f /(CPI*106) 40*106 /(1.55*106) 25.81
1 t (45000*1 32000* 2 15000* 2 8000*2)*( 40*106 ) 3.875*103秒
21
1-11 假设在一台40MHz处理机上运行200,000条指令的目标代码,程序主要由 四种指令组成。根据程序跟踪实验结果,已知指令混合比和每种指令所需的 指令数如下:
指令类型
第2章 指令系统

第2章
指令系统
二地址制
操作码
地址码
地址码
三地址制
操作码
地址码
地址码
地址码
一地址制
操作码
地址码
图2.5 在定长指令字内实现多种地址制
第2章
指令系统
寄存器-寄存器型
操作码
R
R
寄存器-存储器型
操作码
访存地址S
R
带直接操作数
操作码
直接操作数
R
R
图2.6 同种地址制下的多种地址形式和长度
第2章
指令系统
(4)在以上这些措施的基础上,还可以进一步考虑采 用多种指令字长度的指令。如:单字长指令、双字长 指令、三字长指令等。这比只有一种长度的定长指令 字方式更能减少信息的冗余量,缩短程序的长度。 综上所述,指令格式的优化就是指通过采用多种不
0.0 2
0
0.0 1 0.0 2 0.0 5
1
0.0 6
0
0.0 7
1
0.1 3
0.3 5
0
0.2 2 0.4 3
图2.3 利用Huffman树进行操作码编码
第2章
指令系统
9条指令对应的Huffman编码如表2.3所示。
表2.3 操作码的Huffman编码法和2-4扩展码编码法
指令
指令使用频度 pi
第2章
指令系统
2. Huffman编码 Huffman 编码法是1952年由 Huffman 首先提出的一种
编码方法,开始主要用于电报报文的编码。如 26 个英
文字母中,e、t等的使用频率最高,用短码表示;q、x 等的使用频率很低,用长码表示。这样,可以缩短整
个报文的长度,减少报文的传送时间。Huffman编码不
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内容提要
’C54x的指令系统包含助记符指令和代数指令 两种形式。 助记符指令:是一种采用助记符号表示的类似于 汇编语言的指令; 代数指令:是一种比汇编语言更高级,类似于高 级语言的代数形式指令,具有接近汇编语言的特点。 两种指令具有相同的功能。本章着重介绍助记符 指令的分类及基本功能。其内容有: ● TMS320C54x的指令表示方法 ● TMS320C54x的指令系统
源累加器位。S=0为累加器A,S=1为累加器B 状态寄存器的4位位号数 4位移位数区(0~15) 5位移位数区(-16~15)
18
19 20
2013年8月14日
X
Y Z
数据存储器位
数据存储器位 延迟指令位。Z=0无延迟操作,Z=1带延迟操作
DSP原理及应用 14
第2章 指令系统
2.指令操作码符号和缩略语
2013年 指令系统
2.1 指令的表示方法
’C54x的助记符指令是由操作码和操作数两
部分组成。在进行汇编以前,操作码和操作数都是
用助记符表示。
例如: LD #0FFh, A ;将立即数0FF传送至A
操作码 源操作数 目的操作数
2013年8月14日 DSP原理及应用
DSP原理及应用 6
第2章 指令系统
1.指令系统中的符号和缩略语
序号 21 22 23 24 25 26 27 28 29 30
2013年8月14日
符 号 Dmem DP dst dst_ EAB EAR extpmad FRCT hi(A) HM
含
义
数据存储器操作数 ST0中的数据存储器页指针(0DP511) 目的累加器(A和B) 与dst相反的目的累加器 E地址总线 EAB地址寄存器 23位立即程序存储器地址 ST1中的小数方式位 累加器的高阶位(AH或BH) ST1中的保持方式位
DSP原理及应用 5
2013年8月14日
第2章 指令系统
1.指令系统中的符号和缩略语
序号 11 12 13 14 15 16 17 18 19 20
2013年8月14日
符 号 C16 C CC CMPT CPL cond [d],[D] DAB DAR dmad
含
义
ST1中的双16位/双精度算术运算方式位 ST0中的进位位 2位条件码(0CC3) ST1中的ARP修正方式位 ST1中的直接寻址编辑标志位 表示一种条件的操作数,用于条件执行指令 延时选项 D地址总线 DAB地址寄存器 16位立即数数据存储器地址(0~65535)
DSP原理及应用 11
第2章 指令系统
1.指令系统中的符号和缩略语
序号 71 72 73 74 75 符 号 T TC TOS TRN TS 含 义 暂存器 ST0中的测试/控制标志 堆栈顶部 状态转移寄存器 由T寄存器的5~0位所规定的移位数(-16~31)
76
77 78 79 80
2013年8月14日
2013年8月14日 DSP原理及应用
SHIFT:移位数区 移位范围:-16~15
15
第2章 指令系统
2.1.2 指令系统中的记号和运算符 1.指令系统中使用的记号
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 2013年8月14日 14 记 号 黑体字符 斜体字符 [X] # (abc) xy r(n-m) <<nn || \\ // X |X| AAh 含 义 表示指令中的操作码 表示指令中的变量 表示操作数在指令中为任选项 用来表示指令中的立即数 小括号表示一个寄存器或存储单元的内容 x值被传送到y中 表示寄存器或存储器r的第n~m位 移位nn位,nn为正时左移,为负时右移。 表示两指令并行操作 循环左移 循环右移 X取反(1的补码) X取绝对值 DSP原理及应用 AA代表一个十六进制数
例如:
LD Smem,SHIFT,dst
;单数据存储器操作数, A: Smem的存储地址 移位后加载累加器
6 5 4 3 2 1 0
操作码:
15 14 13 12 11 10 9 8 7
0 0
1 0
1 0
0 0
1 1
1 1
1 0
1 D
1 0
A 1
A 0
A S
A H
A I
A F
A T
D: 目的累加器位 D=0 dst为累加器A D=1 dst为累加器B
46
47 48 49 50
2013年8月14日
OVdst_
OVsrc OVM PA PAR
指定与Ovdst相反的目的累加器的溢出标志
指定源累加器(A或B)的溢出标志 ST1中的溢出方式位 16位立即端口地址(0PA65535) 程序存储器地址寄存器
DSP原理及应用 9
第2章 指令系统
1.指令系统中的符号和缩略语
DSP原理及应用 10
第2章 指令系统
1.指令系统中的符号和缩略语
序号 61 62 63 64 65 66 67 68 69 70
2013年8月14日
符 号 RSA SBIT SHFT SHIFT Sind Smem SP src ST0,ST1 SXM
含
义
块重复起始地址寄存器 用于指定状态寄存器位的4位地址(0~15) 4位移位值(0~15) 5位移位值(-16~15) 间接寻址的单数据存储器操作数 16位单数据存储器操作数 堆栈指针寄存器 源累加器(A或B) 状态寄存器0,状态寄存器1 ST1中的符号扩展方式位
从左到右
左移、右移 小于、小于等于 大于、大于等于 不等于 按位与运算 按位异或运算 按位或运算
DSP原理及应用
从左至右 从左至右 从左至右 从左至右 从左至右 从左至右 从左至右
17
∧
|
第2章 指令系统
2.2 指令系统
’C54x的指令系统共有129条基本指令,由于
操作数的寻址方式不同,由它们可以派生多至205
条指令。 按指令的功能可分成六大类: 数据传送指令 算术运算指令 逻辑运算指令 程序控制指令
并行操作指令
重复操作指令
2013年8月14日
DSP原理及应用
18
第2章 指令系统
一、 数据传送指令
是从存储器中将源操作数传送到目的操作数所
指定的存储器中。
包括: 装载指令
存储指令
条件存储指令
混合装载和存储指令
2013年8月14日
DSP原理及应用
19
第2章 指令系统
1.装载指令 即取数或赋值指令,用于将存储器内容或立即 数赋给目的寄存器,共计21条。 源操作数 [,移位数] ,目的操作数 DLD dst 累加器A或B TS 6位移位数 Lmem SARAM中的32位数据 功能: 源操作数按移位数进行移位,将移位结果送入 LD -16TS31 Smem SARAM中的16位数据 T 暂存器 LDM Xmem DARAM中的16位数据 目的操作数指定的寄存器。 16 16位移位数 DP RAM页指针 #K 小于9位的短立即数 LDR SHIFT #lK 16位长立即数 5位移位数 LDU ASM 累加器移 #k9 9位立即数-16SHIFT15 LTD 位方式位 #k5 5位立即数
序号 51 52 53 54 55 56 57 58 59 60
2013年8月14日
符 号 PC pmad pmem PMST prog [R] rnd RC RTN REA
含
义
程序计数器 16位立即程序存储器地址(0pmad65535) 程序存储器操作数 处理器工作方式状态寄存器 程序存储器操作数 舍入选项 循环寻址 重复计数器 快速返回寄存器 块重复结束地址寄存器
uns
XF XPC Xmem Ymem
无符号数
ST1中的外部标志状态位 程序计数器扩展寄存器 16位双数据存储器操作数,用于双数据操作数指令 16位双数据存储器操作数,用于双数据操作数指令 和单数据操作指令
DSP原理及应用 12
第2章 指令系统
2.1.1 指令系统中的符号 2.指令操作码符号和缩略语
2013年8月14日 DSP原理及应用 21
第2章 指令系统
1.装载指令 (4) LD
Smem,16,dst
2013年8月14日
功能: dst=Smem<<16 将Smem所指定的单数据存 储器的数据左移16位后送入A或B。 (5) LD Smem [,SHIFT],dst 功能: dst=Smem<<SHIFT 将Smem所指定的单数据 存储器的数据,按SHIFT所给定的移位数移 位,然后送入A或B。 (6) LD Xmem,SHFT,dst 功能: dst=Xmem<<SHFT 将Xmem所指定的双数据 存储器的数据,按SHFT所给定的移位数移 位,然后送入A或B。
2013年8月14日 DSP原理及应用 1
第2章 指令系统 知识要点
本章涉及的内容包括’C54x指令 系统中的常用符号、缩略语和运算符 ,数据传送、算术运算、逻辑运算、 程序控制、并行操作和重复操作指令 。
2013年8月14日
DSP原理及应用
2
第2章 指令系统
2.1 指令的表示方法 2.2 指令系统
注释
4
第2章 指令系统
2.1.1 指令系统中的符号 1.指令系统中的符号和缩略语
序号 1 2 3 4 5 6 7 8 9 10 符 号 A ALU AR ARx ARP ASM B BRAF BRC 含 义 累加器A 算术逻辑运算单元 泛指通用辅助寄存器 指定某一辅助寄存器AR0~AR7 ST0中的3位辅助寄存器指针 ST1中的5位累加器移位方式位-16~15 累加器B ST1中的块重复操作标志 块重复操作寄存器 用于测试指令,指定数据存储器单元中的哪 BITC或bit_code 一位被测试,取指范围:0~15