基于SOPC的计算机模型机网络交互实验
sopc实验心得

sopc实验心得
在进行SOPC(系统级可编程器件)实验的过程中,我深刻体会到了它的强大和灵活性。
SOPC是一种基于现场可编程门阵列(FPGA)技术的系统设计方法,它将硬件与软件相结合,可以实现高度集成和可重构的设计。
在实验中,我首先学习了SOPC的基本概念和原理,了解了它的组成部分以及各个组件之间的连接方式。
然后,我利用Quartus II软件进行了仿真和综合,将设计的硬件描述语言(HDL)代码转化为FPGA可以理解的形式。
通过仿真,我可以预先验证设计的正确性,并对其进行修改和优化。
接着,我进行了FPGA的编程和配置,将设计好的逻辑电路加载到FPGA芯片中。
通过这一步骤,我可以将自己的设计直接在硬件上实现,并进行实时的测试和调试。
这种即时性和灵活性是SOPC的一个重要优点,它使得我们能够更加高效地进行系统级设计和验证。
在SOPC实验中,我还学习了使用Nios II软核处理器进行嵌入式系统设计。
Nios II是一款可编程的32位RISC处理器,可以根据需求进行定制和配置。
通过Nios II,我可以在FPGA上实现复杂的嵌入式系统,并编写C语言程序进行控制和操作。
总的来说,SOPC实验让我深入了解了系统级可编程器件的原理和应用。
通过实践,我学会了使用Quartus II软件进行FPGA设计和配置,掌握了硬件描述语言
和嵌入式系统的开发方法。
这些知识和技能对我未来的学习和工作都具有重要的意义,我相信在不久的将来,SOPC技术将会在各个领域得到广泛应用。
SOPC实验报告

SOPC系统设计技术实验报告姓名:学号:院系: 信息科学与工程学院专业:电子科学与技术指导老师:完成日期: 2015年04月25日实验二、NIOSII实现串口收发数据及LCD显示一、实验目的(1)进一步熟悉Quartus II、SOPC Builder、NIOS II IDE的操作;(2)掌握SOPC硬件系统及NIOS II软件的开发流程。
二、实验内容(1)、实验平台:硬件:PC级、SmartSOPC+教学实验开发平台;软件:Quartus II 9.0, SOPC Builder 9.0, NIOS II IDE 9.0。
(2)、实验内容:建立包含SDRAM、JTAG_UART、Timer、LCD的NIOS II处理器系统,通过JTAG_UART从IDE的控制端窗口读取输入值N,计算1至N的累加值,并将计算结果及计算花费时间的显示在LCD中。
三、实验步骤3.1硬件设计根据实验内容,可以得出本次实验的硬件结构图如图3.1所示:图3.1 硬件设计结构图具体硬件设计步骤如下:1)、在Quartus II中建立一个工程命名为:smallCore,器件设置为EP3C55F484C8;2)、以原理图输入方式建立空白顶层模块,并保持;3)、打开SOPC Builder,命名SOPC系统名称为nios2system,开始建立NIOS II 系统。
4)、双击SOPC Builder主界面左侧中的“Nios II Processor”,出现Nios II CPU 的配置向导对话框,如图1.4所示,在这里可以有三种Nios II CPU选择,我们选择快速型的Nios II/f,不使用硬件乘法器及除法器。
然后单击Next进入下一步配置;Instruction Cache项中选择2 Kbytes,在Data Cache项中选择512 Bytes,单击Next 进行下一步配置;在“Advanced Features”和“MMU and MPU Settings”选项卡中选择默认参数,然后单击Next,到了“JTAG Debug Module”选项卡,如图1.6所示。
《基于SOPC的目标跟踪系统设计》范文
《基于SOPC的目标跟踪系统设计》篇一一、引言随着科技的进步和计算机视觉技术的不断发展,目标跟踪系统在各个领域中的应用日益广泛,包括安防监控、自动驾驶、人机交互等。
而SOPC(System on a Programmable Chip,可编程芯片上的系统)技术以其高度的集成性、灵活性和可定制性,为目标跟踪系统的设计提供了新的可能。
本文将探讨基于SOPC的目标跟踪系统设计,分析其设计原理、方法及实现过程。
二、SOPC技术在目标跟踪系统中的应用SOPC技术是一种集成了处理器、存储器、外设及可编程逻辑的单芯片系统。
在目标跟踪系统中,SOPC技术可以提供强大的计算能力和灵活的硬件配置,以满足复杂的目标跟踪算法对计算资源和硬件接口的需求。
通过将目标跟踪算法与SOPC技术相结合,可以实现高效、实时的目标跟踪。
三、目标跟踪系统设计原理目标跟踪系统的设计主要包括硬件设计和软件设计两部分。
硬件设计主要涉及SOPC芯片的选型、电路设计、接口设计等;软件设计则包括目标跟踪算法的设计与实现、操作系统及驱动程序的开发等。
在硬件设计方面,需要根据目标跟踪系统的需求,选择合适的SOPC芯片,并设计相应的电路和接口,以保证系统的稳定性和可靠性。
在软件设计方面,需要针对目标跟踪算法进行优化和实现,以满足实时性的要求。
同时,还需要开发操作系统及驱动程序,以实现软硬件之间的良好交互。
四、目标跟踪系统设计方法基于SOPC的目标跟踪系统设计方法主要包括以下几个步骤:1. 需求分析:明确目标跟踪系统的应用场景、性能指标和功能需求。
2. 硬件选型与设计:根据需求选择合适的SOPC芯片,并设计相应的电路和接口。
3. 软件设计与实现:针对目标跟踪算法进行优化和实现,开发操作系统及驱动程序。
4. 系统集成与测试:将硬件和软件进行集成,进行系统测试和性能评估。
5. 优化与调试:根据测试结果进行优化和调试,提高系统的性能和稳定性。
五、实现过程及关键技术在实现基于SOPC的目标跟踪系统的过程中,需要掌握以下关键技术:1. SOPC芯片的选型与配置:根据系统需求选择合适的SOPC 芯片,并配置相应的硬件资源。
SOPC实验指导书
篇一:sopc实验指导书sopc实验3.1使用niosⅱ ide建立用户程序1.创建一个新的c/c++应用工程执行下面的步骤来创建一个新的c/c++应用工程:1. 启动niosⅱ ide。
选择【开始】??【程序】??【altera】??【quartusⅱ 5.0】??【nios ⅱ development kits 5.0】??【niosⅱ ide】启动niosⅱ ide。
也可以通过图1.1直接点击ⅱ ide。
按钮来启动nios图1 启动niosⅱ ide2.如果出现workspace launcher对话框,单击设置工作空间为quartusⅱ工程的文件夹,如图2所示,这样便于管理。
如果是第一次进入工作区,niosⅱ ide会先弹出一个欢迎界面,此时点击右上角的workbench图标,就可以进入niosⅱ ide编辑界面。
图2设置ide工作空间3.如图3所示,选择【file】??【new】??【c/c++ application】来打开新建c/c++工程向导,如图4所示。
图3打开新建c/c++工程向导1图4新建c/c++工程向导4.单击select target hardware右侧的按钮打开select target hardware窗口,选择led_nios2_system.ptf文件,即指向当前硬件设计系统,如图5所示。
图5选择硬件目标文件5.选择select project template列表中的hello_led。
name栏中自动更新为hello_led_0,确认选中use default location栏,如图6所示,单击完成工程创建。
2图6完成设置后的工程向导向导中的select project templates一栏中是已经设计好的软件工程,用户可以选择其中的一个,把它当作模板来创建自己的工程。
当然也可以选择blank project(空白工程),完全由用户写所有的代码。
本实验选取了hello_led工程,然后在此基础上进行适当的修改,一般情况下这比空白工程更加容易,也更方便。
基于SOPC的魔方解算机器人设计与开发

基于SOPC的魔方解算机器人设计与开发随着人工智能和机器人技术的不断发展,我们生活中越来越多的机器人产品。
以Rubik's Cube(魔方)为代表的智力玩具也成了机器人设计与开发的热门方向之一。
本文将介绍基于SOPC(System on a Programmable Chip)的魔方解算机器人的设计与开发过程。
一、项目背景魔方是一种立方体智力玩具,由三维的小立方块组成,每个面都有不同的颜色。
玩家需要通过转动立方体的六个面,使得每个面的小立方块都是同一个颜色。
魔方的复杂度和难度使得解开它成为一个智力和反应能力的极大挑战。
传统的魔方解算机器人通过机械臂和计算机视觉技术来实现,但是这些解算机器人通常需要庞大的体积和复杂的结构,造价昂贵。
基于SOPC的魔方解算机器人则采用了更加灵活、高效的设计方案,通过深度学习算法和实时控制技术实现魔方的自动解算。
二、设计原理基于SOPC的魔方解算机器人采用了一种新颖的设计思路,即将整个系统集成到可编程芯片中,通过硬件和软件的结合实现魔方的解算过程。
具体来说,系统包括以下几个模块:1. 视觉模块:搭载摄像头传感器和图像处理模块,用于实时获取魔方的状态和颜色信息。
摄像头将魔方的图像传输到图像处理模块,通过图像处理算法解析出魔方上每一个小块的颜色信息,并将信息传输给控制中心。
2. 控制中心:搭载FPGA芯片,用于实时处理图像信息和控制机械臂的运动。
控制中心根据视觉模块传来的颜色信息,通过深度学习算法计算出魔方的最优解算路径,并控制机械臂的运动来实现魔方的自动解算。
3. 机械臂:由多个舵机组成,用于实现魔方的旋转动作。
控制中心通过控制舵机的角度和速度来实现魔方的转动,从而完成解算过程。
三、技术实现1. 图像处理算法:基于深度学习算法实现图像颜色信息的识别和魔方解算路径的计算。
通过训练神经网络模型,实现对魔方颜色信息的识别和解算路径的生成,提高解算的准确度和效率。
2. 实时控制技术:利用FPGA芯片的高性能并行计算能力和低延迟的特点,实现图像信息的实时处理和机械臂的实时控制。
sopc实验指导书(1)

CON目录第一章实验箱简介 (2)第二章EDA实验单元 (5)实验一七人表决器 (5)实验二格雷码变换 (13)实验三BCD码加法器 (15)实验四四位全加器 (17)实验五四人抢答器 (19)实验六四位并行乘法器 (20)实验七设计基本触发器 (21)实验八设计74LS169计数器功能模块 (25)实验九步长可变的加减计数器 (27)实验十可控脉冲发生器 (28)实验十一正负脉宽数控调制信号发生器 (30)实验十二序列检测器 (32)实验十三四位并行流水乘法器 (34)实验十四出租车计费器 (37)实验十五多功能数字钟 (39)实验十六数字秒表 (41)实验十七频率计 (43)实验十八交通灯控制器 (45)实验十九数码锁 (47)实验二十VGA彩条发生器 (49)附录 (51)第一章实验箱简介EDA/SOPC实验箱是集EDA和SOPC开发为一体的综合性实验箱,它不仅可以独立完成几乎所有的EDA设计,也可以完成大多数的SOPC开发。
采用Altera公司的Cyclone系列的12万门FPGA为核心,整个系统采用模块化设计,各个模块之间可以自由组合,使得该实验箱的灵活性大大提高。
同时实验箱还提供了丰富的接口模块,供人机交互,从而大大增加了实验开发者开发的乐趣,满足了普通高等院校、科研人员等的需求。
开发工程师可以使用VHDL语言、Verilog HDL语言、原理图输入等多种方式,利用Altera公司提供的Quartus II及Nios软件进行编译,下载,并通过EDA/SOPC实验箱进行结果验证。
实验箱提供多种人机交互方式,如键盘阵列、按键、拨挡开关输入;七段码管、大屏幕图形点阵LCD显示;串口通信;VGA接口、PS2接口、USB接口、Ethernet接口等,利用Altera 公司提供的一些IP资源和Nios 32位处理器,用户可以在该实验箱上完成不同的SOPC设计。
EDA/SOPC实验箱提供的资源有:●Altera公司的EP1C6Q240C8,12万门级FPGA,另外可选配更高资源的FPGA●FPGA配置芯片采用可在线变成的EPC2,通过JTAG口和简单的跳线即可完成设计的固化●1个数字时钟源,提供48MHz、12MHz、1MHz、100KHz、10KHz、1KHz、100Hz、10Hz、2Hz和1Hz等多个时钟●1个模拟信号源,提供频率和幅度可调的正弦波、三角波和方波●两个串行接口,一个用于SOPC开发时的调试,另一个可以完成其它的通信●1个VGA接口●1个PS2接口,可以接键盘或鼠标●1个USB接口,利用PDIUSBD12芯片实现USB协议转换●1个Ethernet接口,利用RTL8019芯片实现TCP/IP协议转换●基于SPI接口的音频CODEC模块●1个输入、输出探测模块,供数字信号的观察●16个LED显示●8个拨挡开关输入●8个按键输入●1个4X4键盘阵列●8个七段码管显示●1个扬声器模块●1个交通灯模块●1个直流电机模块●1个高速AD和1个高速DA●240×128大屏幕图形点阵LCD显示●存储器模块提供256K×32Bit的SRAM和2M×8Bit的FLASHROM实验箱基本布局如下图1-1所示:图1-1 EDA/SOPC 试验箱系统布局下面就部分模块做简要介绍。
SOPC实验报告

SOPC设计基础实验报告学院:电子与信息工程学院学号:姓名:实验一开发软件使用练习一实验目的实验目的:掌握基于SOPC硬核处理器的设计流程。
二实验设备安装Quartu II的PC、实验箱三实验内容和步骤1)打开Quarts II 11.1,建立工程2)在菜单栏的File中选择New选项3)默认是New Quartus II Project,选OK4)选择Next,工程目录选择自己新建的文件夹,工程名输入E_Play5)源文件添加,点击Next直接跳过6)选择编号为EP4CE6E22C8的器件7)EDA工具选择,直接点击Next跳过8)项目信息显示,点击Finish完成空工程的建立9)配置无用引脚:在主页面菜单栏点击Assignments,接着在下拉框中选择Device选项,出现如下窗口:As input tri-stated with weak pull-up.点击OK完成。
创建软核处理器系统1)点击菜单栏的Tools,在下拉框中选择SOPC Builder选项,将System Name定为E_Play,下方的Target HDL选VHDL,最后点击OK确认。
2)Device Family选择Cylone IV E,Clock Frequency定为50MHz3)配置软核处理器系统点开左侧Processors总选项,双击Nios II Processor,选择Nios II/e另外在JTAG Debug Module选项中选择第一项,点击Finish完成配置4)配置存储器点开左侧Memories and Memory Controllers总选项,点开第二个On-Chip分选项,双击On-Chip-Memory,在Total memory sizes后输入4096点击Finish,在Onchip-memory2_0上右击,Rename为onchip-memory5)点开左侧Interface Protocols总选项,点开Serial分选项,双击JTAG UART,点击Finish完成6)在jtag_uart_0上右击,Rename为jtag_uart产生软核处理器系统1)双击cpu_0,将Reset Vector和Exception Vector的Memory均设置为onchip_memory,点击Finish完成。
《基于SOPC的目标跟踪系统设计》范文

《基于SOPC的目标跟踪系统设计》篇一一、引言随着科技的不断进步,目标跟踪系统在众多领域如安防监控、自动驾驶、智能机器人等的应用越来越广泛。
本文旨在探讨基于SOPC(System on a Programmable Chip,可编程片上系统)的目标跟踪系统设计。
SOPC以其高度集成、可定制和灵活的特性能有效满足目标跟踪系统的高效、实时和准确性的要求。
二、SOPC概述SOPC是一种将处理器、存储器、接口和可编程逻辑等集成在单一芯片上的系统。
它结合了ASIC(应用特定集成电路)的高性能和FPGA(现场可编程门阵列)的灵活性,为各种复杂系统设计提供了强大的硬件支持。
在目标跟踪系统中,SOPC能够提供高效的计算能力和灵活的配置,以满足不同场景下的需求。
三、目标跟踪系统设计1. 系统架构设计基于SOPC的目标跟踪系统设计主要包括硬件设计和软件设计两部分。
硬件设计包括SOPC芯片的选型、处理器和外设的配置等;软件设计则包括操作系统、算法实现和优化等。
整个系统架构应具备高集成度、低功耗、高效率等特点。
2. 算法选择与实现目标跟踪算法是目标跟踪系统的核心。
常用的目标跟踪算法包括光流法、Mean Shift法、相关滤波法等。
在基于SOPC的目标跟踪系统设计中,应根据实际需求选择合适的算法,并对其进行优化,以实现高效、准确的目标跟踪。
3. 硬件加速设计为了进一步提高目标跟踪系统的性能,可以采用硬件加速设计。
通过在SOPC芯片上实现部分算法的硬件加速,可以大大提高系统的处理速度和准确性。
例如,可以利用FPGA实现目标检测、特征提取等算法的硬件加速。
四、系统实现与测试1. 硬件实现根据系统架构设计和硬件选型,完成SOPC芯片的配置和外设的连接。
确保硬件平台具备稳定的性能和可靠的功耗控制。
2. 软件实现与优化在操作系统支持下,完成目标跟踪算法的软件实现。
通过优化算法和利用SOPC的并行处理能力,提高软件的运行效率和准确性。
基于SoPC的网络模块设计与实现
务 要 求决 定 系统 需求 ,用 S P ule建 立 自己 的 oCB i r d
电子 器 件 及 应用 。
图 1 Nis Ⅱ软 核 处 理 器 原 理 框 图 o
系 申 辱
A AL) V (N交换 架 构
审萆曲
图 2 S P I h e 生 成 的 系 统 模 块 买 例 o C R J lr i
摘 要 : ̄ Atr& -l a e
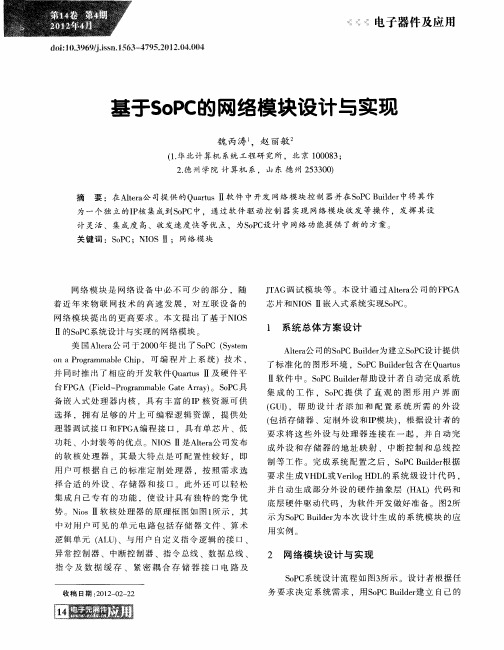
提 供 的Q atsI软 件 中开发 网络模 块控 制 器  ̄S P ule 将 其作 u r I u o CB i r d
为 一个独 立 的I 核 集 成到S P ,通过 软 件驱 动控 制 器 实现 网络模 块 收 发等操 作 ,发挥 其设 P o Cq -
SP o C系统 。在 硬 件方 而 ,建 一 个顶层 设 计 文件 , 将 生 成 的S P o C系统 例化 .并 设 置 引 脚 分 配 、时序
要 求 及 其 它 设 计 约 束 ,然 后 编 泽 硬 件 设 计 并 将 F — P
图3 S P o C系统 设 计 流 程
G A设 计 下载 列 目标 板 中 。在 软 件方 面 ,用 No I i l s IE D 开发 应 用软 件 ,在 其 中使 用Ni 1 令仿 真 器 o I指 s 运行 并 调 试 软 件 . 后 将 可 执 行 软 件 下载 到 目标 之
电子器件及应用
d i!》 9 9i s 。5 3 4 9 0 2t 0 o :I3 6 / i l 6 - 7 52 1 40 4 l s }
基于S P 的网络模块设计 与实现 oC
魏 丙涛 .赵 丽敏。
f. 1华北计 算机 系统 工程研 究所 ,北京 10 8 ; 0 0 3 2德 州 学院 计 算机 系,山 东 德 州 2 3 0 ) . 5 30
第8章-基于SOPC实现的数字信号处理实验报告

36
GENERIC MAP (W2=>W2, W1=>W1, W=>W) PORT MAP (clk=>clk, x_in=>Bre_in, y_in=>Bim_in, c_in=>c_in, cas_in=>cas_in, css_in=>css_in, r_out=>r, i_out=>i); sub_1:lpm_add_sub GENERIC MAP (LPM_WIDTH=>W, LPM_DIRECTION=>"SUB", LPM_REPRESENTATION=>"SIGNED") PORT MAP (dataa=>Are_in, datab=>r, result=>Dre); sub_2:lpm_add_sub GENERIC MAP (LPM_WIDTH=>W, LPM_DIRECTION=>"SUB", LPM_REPRESENTATION=>"SIGNED") PORT MAP (dataa=>Aim_in, datab=>i, result=>Dim); add_1:lpm_add_sub GENERIC MAP (LPM_WIDTH=>W, LPM_DIRECTION=>"ADD", LPM_REPRESENTATION=>"SIGNED") PORT MAP (dataa=>Are_in, datab=>r, result=>Ere); add_2:lpm_add_sub GENERIC MAP (LPM_WIDTH=>W, LPM_DIRECTION=>"ADD", LPM_REPRESENTATION=>"SIGNED") PORT MAP (dataa=>Aim_in, datab=>i, result=>Eim); PROCESS BEGIN WAIT UNTIL clk'event and clk='1'; Dre_out<=Dre;
《基于SOPC的声纹识别系统的设计与现》范文

《基于SOPC的声纹识别系统的设计与现》篇一基于SOPC的声纹识别系统的设计与实现一、引言随着信息技术的飞速发展,声纹识别技术已成为生物特征识别领域的重要分支。
基于SOPC(System on a Programmable Chip,可编程片上系统)的声纹识别系统,以其高集成度、低功耗、高效率等优势,逐渐在各类应用中崭露头角。
本文将详细介绍基于SOPC的声纹识别系统的设计与实现过程。
二、系统设计1. 硬件设计本系统硬件部分采用SOPC技术,将处理器、存储器、接口电路等集成在一块芯片上。
其中,处理器选用高性能、低功耗的RISC架构处理器,以满足实时处理的需求。
存储器包括RAM和Flash存储器,分别用于存储程序代码和数据。
接口电路包括麦克风接口、扬声器接口、USB接口等,用于与外部设备进行数据传输和交互。
2. 软件设计软件部分包括操作系统、声纹识别算法及驱动程序等。
操作系统选用嵌入式实时操作系统,以保证系统的实时性和稳定性。
声纹识别算法采用先进的语音处理技术和特征提取方法,包括预处理、特征提取、模型训练等步骤。
驱动程序负责与硬件设备进行通信,实现数据的采集和传输。
三、声纹识别算法实现1. 预处理预处理阶段主要包括降噪、端点检测等操作。
针对录音中的背景噪声,采用谱减法等算法进行降噪处理,以提高语音质量。
端点检测则用于确定语音的开始和结束位置,以便进行后续的特征提取。
2. 特征提取特征提取是声纹识别的关键步骤。
本系统采用MFCC(Mel Frequency Cepstral Coefficients)等特征参数,对语音信号进行频谱分析,提取出反映声纹特性的参数。
这些参数具有较好的抗噪性和稳定性,能有效提高声纹识别的准确率。
3. 模型训练模型训练采用机器学习算法,如支持向量机(SVM)、神经网络等。
通过大量训练样本的学习和优化,建立声纹识别模型。
在模型训练过程中,还需对参数进行调优,以获得最佳的识别效果。
EDA/SOPC实验教学方法探讨
EDA/SOPC实验教学方法探讨EDA (Exploratory Data Analysis) 和 SOPC (System on Programmable Chip) 是两种不同的实验教学方法,也分别应用于不同的领域。
EDA 主要用于数据分析和可视化,而 SOPC 则是用于数字系统设计和嵌入式系统开发。
本文将探讨这两种方法在实验教学中的应用,并讨论它们的优势和劣势。
首先,我们来看看EDA在实验教学中的应用。
EDA是一种探索性数据分析的方法,通过统计图表、描述性统计等手段来发现数据的特征和规律。
在教学中,EDA可以帮助学生更好地理解和分析数据,培养他们的数据分析能力和解决问题的能力。
通过实际操作和实验,学生可以学会如何使用各种工具和技术来进行数据的清洗、转换、可视化和分析,进而提高数据处理和数据挖掘的能力。
在教学中,我们可以使用各种数据集来进行 EDA,比如 iris 数据集、泰坦尼克号数据集等,让学生通过实际操作来了解数据集的特征和结构。
学生可以利用 Python 的 pandas、numpy、matplotlib等库来进行数据分析和可视化,从而加深对数据的理解。
此外,还可以引导学生进行数据探索性分析,比如查看数据的分布、相关性等,从而为后续的建模和预测做准备。
然后,我们来看看SOPC在实验教学中的应用。
SOPC是一种基于可编程逻辑器件的系统设计方法,可以将多个硬件模块集成在一个芯片上,实现数字系统的设计和嵌入式系统的开发。
在教学中,SOPC可以帮助学生更好地理解数字系统的原理和设计方法,培养他们的硬件设计和嵌入式开发能力。
通过实际操作和实验,学生可以学会如何使用FPGA来实现数字系统的功能模块,如寄存器、计数器、逻辑门等,进而提高其系统设计和开发的能力。
在教学中,我们可以使用 Quartus II、Vivado等工具来进行 SOPC 的设计和实施,比如设计一个简单的计数器、LED 控制器等。
《基于SOPC的多种生物特征识别系统的研究》范文
《基于SOPC的多种生物特征识别系统的研究》篇一一、引言随着科技的进步和人类对安全性的需求日益增长,生物特征识别技术已成为现代社会中不可或缺的一部分。
生物特征识别系统以其独特的非接触性、不可复制性、唯一性等特点,广泛应用于身份验证、安全控制、人机交互等多个领域。
近年来,基于SOPC(System on a Programmable Chip,可编程片上系统)的多种生物特征识别系统更是受到了广泛的关注。
本文将详细研究基于SOPC的多种生物特征识别系统的技术原理、实现方法及研究进展。
二、SOPC与生物特征识别系统概述SOPC是一种集成了可编程逻辑电路和嵌入式系统的芯片,其高度集成性、灵活性以及低功耗的特点使其在生物特征识别系统中具有独特的优势。
生物特征识别系统则是一种通过人体固有的生理特征或行为特征进行身份识别的技术,如指纹识别、面部识别、虹膜识别等。
三、基于SOPC的生物特征识别系统技术原理基于SOPC的生物特征识别系统主要分为数据采集、预处理、特征提取、匹配识别等几个步骤。
首先,通过传感器等设备采集生物特征数据;然后,对数据进行预处理,如去噪、增强等;接着,提取出生物特征的关键信息,形成特征模板;最后,将提取的特征与数据库中的模板进行比对,实现身份识别。
四、基于SOPC的多种生物特征识别系统实现方法在实际应用中,基于SOPC的生物特征识别系统常采用多种生物特征融合的方法,以提高识别的准确性和可靠性。
例如,将指纹识别和面部识别相结合,同时采集用户的指纹和面部信息,进行双重验证。
此外,SOPC的强大处理能力还可以实现对多种生物特征的并行处理,提高系统的整体性能。
五、研究进展及未来趋势目前,基于SOPC的多种生物特征识别系统已在多个领域得到广泛应用。
在技术方面,研究人员不断探索新的算法和模型,以提高识别的准确性和速度。
同时,随着人工智能技术的发展,基于深度学习的生物特征识别技术也取得了显著的进展。
在应用方面,多种生物特征融合的识别系统逐渐成为主流,以满足不同场景下的需求。
基于SOPC的网络视频监控头的研究与实现的开题报告
基于SOPC的网络视频监控头的研究与实现的开题报告一、选题的背景及意义:随着计算机与通信技术的发展,网络视频监控系统越来越受到人们的关注。
网络视频监控系统可以实现无时无刻的视频监控,方便了人们对于安全问题的监管,因此在无数场合中被广泛应用。
目前市场上存在着众多网络视频监控系统,但大部分系统存在着许多问题,如可靠性、安全性、成本等问题。
基于SOPC的网络视频监控头是一个新型的网络视频监控系统,可以实现高效、安全、低成本的视频监控,而且易于控制和管理。
因此,本课题选择研究基于SOPC的网络视频监控头的设计与实现,旨在解决传统网络视频监控系统存在的问题,提高系统的可靠性、安全性、灵活性和智能化水平,为社会的经济发展和人民的生活安全提供有力的支持和保障。
二、国内外研究现状:网络视频监控系统一直是国内外研究的热点之一,目前国内外已经有很多学者和企业对网络视频监控系统进行了深入的研究与开发,如美国的Honeywell公司、荷兰的Philips公司、英国的Videcon公司、中国的海康威视、大华股份等企业。
这些企业都在网络视频监控系统的研究和开发方面积累了丰富的经验,并取得了一定的成果。
在基于SOPC的网络视频监控系统的研究和开发方面,国内外也有很多学者和企业进行了相关的研究。
如中国科学院、武汉理工大学、北京大学等,都在研究基于SOPC的网络视频监控系统方面取得了一定的成果。
三、预期目标:本课题的主要研究目标如下:1、设计基于SOPC的网络视频监控头的硬件架构,实现视频采集、压缩、传输和播放等功能;2、设计基于SOPC的网络视频监控头的软件系统,实现视频监控的各种功能,包括实时监控、远程监控、录像保存、事件报警等;3、对基于SOPC的网络视频监控头的系统进行测试和评估,验证系统的可靠性、安全性和性能优势。
四、拟采用的研究方法:本课题将采用如下研究方法:1、文献综述法:对国内外相关研究文献进行综述,全面掌握网络视频监控系统的最新发展和趋势;2、理论分析法:对SOPC技术进行理论分析和研究,确定网络视频监控头的硬件和软件架构设计;3、实验研究法:设计并实现网络视频监控头硬件和软件系统,进行系统测试和评估,验证系统的可行性和效果。
智能移动式果蔬采摘机器人设计—基于SOPC神经网络
智能移动式果蔬采摘机器人设计—基于SOPC神经网络邓荣【摘要】果蔬采摘机器人一般采用移动式机器人,虽有着强大的计算能力和移动性,但其感知能力的局限性限制了其智能的发展. 为了提高果蔬采摘机器人的智能移动性能,使其拥有更好的实现自主导航的能力,采用( system on a programma-ble chip , SOPC )微处理器系统设计了一种新的智能移动式机器人控制系统,并采用神经网络算法对其进行了优化,大大提高了机器人移动的精确性,增强了输入和输出的线性关系,使控制系统在单片芯片上实现了复杂系统的全部功能. 通过测试发现:机器人的移动躲避障碍物时速度的稳定性较好,移动误差较低,实现了果蔬采摘无人控制下的智能移动.%Fruit and vegetable picking robots generally use the mobile robot , which has a powerful computing capacity andmobility .However ,the limitations of their sensing ability limits the development of the intelligent .In order to im-prove fruit picking robot intelligent mobile performance , it has better achieve autonomous navigation capabilities by SOPC of a new intelligent mobile robot control system , and it optimized neural network algorithm , greatly improved the accuracy of mobile robot , enhanced the linear relationship between the input and output , made control system on a single chip re-alize all the functions of the complex system .Through the test , it is found that the speed of the robot's movement is better and the moving error is lower , and the intelligent movement of the fruit and vegetable picking is realized .【期刊名称】《农机化研究》【年(卷),期】2016(038)008【总页数】5页(P184-188)【关键词】果蔬采摘机器人;智能移动;自主导航;SPOC技术【作者】邓荣【作者单位】重庆工程职业技术学院,重庆 402260【正文语种】中文【中图分类】S225.91;TP242现代果实采摘机器人已经开始应用智能化控制系统,对整个系统影响较大的是传感器的工作性能。
基于SoPC的网络入侵检测中模式匹配系统设计

基于SoPC的网络入侵检测中模式匹配系统设计陈勇;南玲巧;任鹤翔;李晶皎【期刊名称】《电子技术应用》【年(卷),期】2011(37)11【摘要】This paper presents a pattern matching system that based on FPGA. This paper uses DM9000A to receive network data and uses Snort rule and HashMem function to match pattern. With software simulation the conflict pattern string of Snort rules found out and processed separately. So, conflict can be high-speed solved. The experimental results show that when processing more Snort rules, the system resource consumption increased very little, throughput is not affected, which has more advantage compared to the performance of traditional systems.%设计了一种基于FPGA的模式匹配系统,通过Verilog HDL语言实现系统主体;采用开源的Snort规则,选用由“异或”运算组成的适合FPGA处理的HashMem函数进行模式匹配;通过软件预处理找出Snort中的冲突模式串进行单独匹配从而用硬件方法解决冲突.硬件电路采用DM9000A网络控制器接收网络数据.实验结果显示,当处理的Snort规则数增多时,系统资源消耗低,吞吐量稳定,相比于传统系统随着规则数增加性能下降的特性,此系统更具优势.【总页数】4页(P13-16)【作者】陈勇;南玲巧;任鹤翔;李晶皎【作者单位】东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819;东北大学信息科学与工程学院,辽宁沈阳110819【正文语种】中文【中图分类】TP393.08【相关文献】1.基于模式匹配的网络入侵检测系统 [J], 田大新;刘衍珩;魏达;张树伟2.网络入侵检测系统中的模式匹配算法设计优化 [J], 陈卓民3.网络入侵检测系统中基于多核平台的模式匹配技术研究 [J], 吴诚堃;殷建平;蔡志平;程杰仁4.基于网络入侵检测系统的改进BM模式匹配算法研究 [J], 易著梁5.基于多模式匹配算法的计算机网络入侵检测研究 [J], 唐君;杨云因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验十六、基于SOPC 的两实验箱交互通讯实验
一、 实验目的:
1、 了解SOPC 技术及其使用;
2、 掌握EP4CE6实现网络通讯功能的方法。
二、 实验原理:
在本实验中,使用集合SOPC 的EP4CE6芯片实现网络收发功能。
在QuartusII10.0开发环境中使用SOPC Builder 工具建立软核CPU —SOPC ,完成功能配置,分配管脚,并通过NIOS II 11.0 Eclipse 编写C 语言程序控制DM9000A 以太网控制器最终实现两实验箱交互网络收发功能。
网络发送、接收的C 程序流程图如下:
三、 实验连线
1、取两台实验箱,每个实验箱按照“图2”进行连线;
图2 实验箱1连线图
图1
2、用一根直连网线将两台实验箱连接起来,如图3;
图3 两台实验箱网络连线图
四、实验过程一
1、按照接线要求将硬件连接好后;
2、从任一实验箱甲上发送任意8位二进制数据(即实验箱左下方的数据输
入电路DIJ1:D7...D0),如10101001;
3、观测另外一个实验箱乙,查看对应的数据总线的低8位LED灯,如果
显示数值为10101001,则说明实验箱乙收到了实验箱甲的数据;
五、实验过程二(选作,兴趣性实验)
1、打开Quartus II11.0工程文件test.qsf,进入Quartus集成开发环境(如图3所示)。
图4 QuartusII10.0集成开发环境
2、图3中间的mycpu符号为通过SOPC Builder工具定制的软核CPU,双击它可弹出SOPC Builder工具,实现对软核的配置,图4为软核mycpu 的具体配置。
图5 软核mycpu具体配置
3、通过实验模块上的JTAG下载口将test.sof文件下载到SOPC网络实验模块上。
4、打开NIOS II 11.0 Eclipse开发环境,选择工作空间\EP4CE6_NET1\workspace,其界面如图5所示。
图6 NIOS II 11.0 Eclipse开发环境
5、点击Run菜单,选择Run Configuration完成下载配置(包括下载文件和下载端口(Target Connection菜单)选择),如图6所示,完成配置后点击RUN即可。
图7 下载ELF文件
6、下载成功后,可在从NIOS II 11.0 Eclipse操作环境下方的NIOS II
console观察实验结果。
图6显示网络初始化成功,开始发送和接收网络数据。
图8 NIOS II console显示初始化结果
7、从实验箱上发送任意两位16进制数据(即实验箱左下方的数据输入电路:D7...D0)此时可在NIOS II中的console窗口中看到我们发送的数据
—data之后的数据。
图9 实验箱发送来的数据可在Console窗口观察
8、实验总结:以太网是计算机的必备外设之一,第实验15、16也是《计算机组成及系统结构》课程的一个综合创新实验,通过完成上述实验后,可以更好的让大家了解计算机原理通过FPGA重构的知识,还可以让大家更好的掌握SOPC的设计方法,因为下一代的微处理器设计技术与这些非常紧密。