汽车车灯同步转向装置设计
基于单片机控制的汽车转向同步照明装置
代码
00H 0l5 O.35一O.70 0.70.1.05
这样,单片机可利用查表程序迅速读出前照灯 应转过的角度。 单片机的外围电路包括传感器的信号输入、步 进电动机的脉冲输出信号、电源、复位和振荡电路,
11221 第31卷第7期2009—07
模拟信号的输入端进行抗干扰设计,该装置采用光 电隔离的方法,如图4所示。WYH—AT一3无触点式 角位移传感器输出的信号经线性光耦HCNR201隔离 后输入到P87C591单片机中,可以取得较好的效果。
0引言
目前汽车前照灯大都是与车身固结在一起的, 不能随车轮的转向而同步转动,这样在夜间行驶时 就存在照明死角,转弯内侧的路面没有灯光照明而 看不清楚,从而带来了巨大的安全隐患fI—l。汽车同 步转向灯技术可以解决夜间汽车转弯时固定式前照 灯的“视觉盲点”问题,有利于司机及时观测到转 弯处的路况,使车辆驾驶更加轻松,提高夜间汽车 行驶的安全性。
‘D
4结论
本文基于P87C591单片机开发研制了汽车转向 同步照明装置,解决了固定式前照灯因转向而带来 的照明“盲点”问题,是汽车照明技术的一大革新。 本装置简单实用、可靠性高,具有较好的市场前景。
参考文献:
【1】应育周.自动转向前照灯将成新卖点【J】.中国汽车报,2007,
B(16).
【2】董江辉.智能转向照明技术带您进入崭新的照明时代【J】. 汽车与配件,2006,4(19). 【3】王晓明.电动机的单片机控制【M】.北京:北京航空航天大学 出版社,2002. 【4】雷思孝,冯育长.单片机系统设计及工程应用【M】.西安:西
N
读电机步数『I
l读电机步数
m薪Y
结束
数减I非o>
I‘=r、步数减1 j哑
汽车辅助照明随动系统设计
汽车辅助照明随动系统设计摘要:分析了普通汽车前大灯照明存在的缺陷,应用单片机芯片,设计出汽车辅助照明随动系统。
该系统可以随着汽车的转向提前把辅助光源照在汽车的左前方或右前方,使行车速度和行车安全问题得到改善。
关键词:汽车辅助照明;随动系统;2051单片机;霍尔开关;步进电机0 引言驾驶A、B级汽车的驾驶员会遇到这样的问题,当夜晚行驶在盘山公路或乡村的小街巷时,总觉得前大灯照着的方向与你行驶的道路不一致。
行车速度和行车安全存在很大问题。
汽车辅助照明随动系统是以单片机AT892051芯片为控制核心,控制步进电机带动辅助照明光源,随方向盘的转动而转动。
对汽车的前大灯照明起到辅助作用。
辅助照明光源采用高亮度LED灯,这种光源节能、抗震性能好、重量轻,符合“辅助”的特点,可以随时安装或取下。
安装时只需用光源底部的永久磁铁吸附在驾驶室顶部或汽车的任何部位。
用霍尔开关检测汽车的转向、转角的大小以及转弯的速率,将检测信号和倒车信号一起送至单片机的输入接口,经单片机分析、计算、判断后,由单片机的输出接口输出控制信号,控制步进电机及辅助光源的转动,从而实现随动控制。
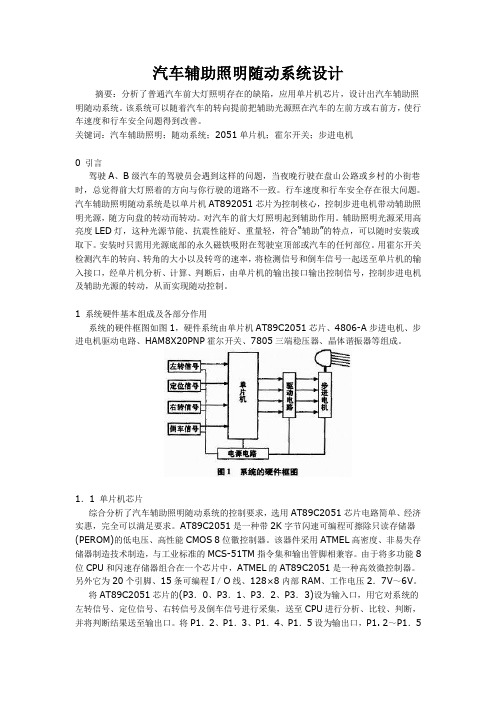
1 系统硬件基本组成及各部分作用系统的硬件框图如图1,硬件系统由单片机AT89C2051芯片、4806-A步进电机、步进电机驱动电路、HAM8X20PNP霍尔开关、7805三端稳压器、晶体谐振器等组成。
1.1 单片机芯片综合分析了汽车辅助照明随动系统的控制要求,选用AT89C2051芯片电路简单、经济实惠,完全可以满足要求。
AT89C2051是一种带2K字节闪速可编程可擦除只读存储器(PEROM)的低电压、高性能CMOS 8位徽控制器。
该器件采用ATMEL高密度、非易失存储器制造技术制造,与工业标准的MCS-51TM指令集和输出管脚相兼容。
由于将多功能8位CPU和闪速存储器组合在一个芯片中,ATMEL的AT89C2051是一种高效微控制器。
另外它为20个引脚、15条可编程I/O线、128×8内部RAM、工作电压2.7V~6V。
汽车车灯同步转向装置
毕业设计(论文)更多论文请加QQ: 1634189238 492186520题目:汽车车灯同步转向装置专业:数控技术及应用班级:04423学号:25姓名:指导老师:成都电子机械高等专科学校二〇〇七年六月摘要论文主从介绍汽车的发展入手深入地说明了汽车发展从而引出汽车的创新与现实要求相结合。
从当今汽车的使用者方便安全着手解出汽车夜间行驶的出现的困扰。
表明该设计课题与生活的紧密性。
设计中大量结合了已通过前人得出的结论。
结合现有的汽车转向原理中设计的汽车车灯同步转向装置。
并在设计中采用了连杆与铰链的结合使用使其过到目的。
而车灯受力转动所获得的转动力是通过与车轮转向节相固定的转向臂上获得。
该装置只是在原有的汽车系统中添加了一个使车灯转向的机构。
所以汽车车轮转向机构并不变。
只是在车轮转向节上多了一个力输出转向臂。
所以汽车的转向器与横向拉杆还在车轮转动部份不变。
采用连杆使汽车车灯转向必须添加一个车灯摇臂使车灯获得转动的力与转角。
设计好后通过实际的汽车车灯同步装置来证明该转向装置可以被实际中采用。
本论文中的理论设计都以其模型为基础来进行说明关键词:汽车车灯同步转向、车轮转向臂、车灯转向臂、横向拉杆。
AbstractThesis lord the development of the car commenced to explain a car a development thoroughly thus from the introduction derivation car of innovation and reality request to combine together.It is safe to begin to solve the harassment of[with] emergence that a car nighttime drives nowadays from the automotive user convenience.The enunciation should design the close of topic and life.Design to win in great quantities combine have already passed the conclusion that the people of the past get.The car lamp of designing changed direction device to adopt to connect pole and pintle to combine an usage to make it lead a purpose synchronously.But the lamp be turned by dint to move acquisition of turn motive is pass to change direction stanza with car wheel to fix mutually of change direction arm to acquire up.Should equip to just increase an organization which makes the lamp change direction in originally of the car system.So the car car wheel changes direction organization constantly.It was just in the car wheel to change direction stanza a top to have another a dint exportation to change direction arm.So car of change direction a machine with horizontal pull a pole still in the car wheel turn to move a part constantly.Adoption's connecting a pole to make the car lamp change direction has to increase a lamp to shake arm to make the lamp is become dynamic dint and turn Cape.Designing to pass actual synchronizer of the car lamp behind to proving so much's shoulding change direction device can be won an adoption physically.Theories designs in this thesis all take its model as foundation to carry on elucidation.Keyword:The car lamp changes direction synchronously, the car wheel change direction arm, lamp to change direction arm, horizontal pull a pole.目录摘要 (I)ABSTRACT (II)目录 (III)第一章引言 (4)1世界汽车发展史与汽车发展的方向 (4)2. 现代汽车转向装置的设计趋势 (9)3现代汽车转向装置的发展趋势 (10)4动力转向是发展方向 (11)第二章汽车车灯转转向装置 (12)2.1汽车车灯转转向装置概述 (12)2.1.1汽车车灯同步转向系统。
一种汽车车灯随车转向系统[发明专利]
![一种汽车车灯随车转向系统[发明专利]](https://img.taocdn.com/s3/m/f09b142cb6360b4c2e3f5727a5e9856a561226f3.png)
(10)申请公布号(43)申请公布日 (21)申请号 201510767222.0(22)申请日 2015.11.10B60Q 1/12(2006.01)(71)申请人迅驰车业江苏有限公司地址212322 江苏省镇江市丹阳市丹北镇新桥群楼工业园1号(72)发明人张荣平(54)发明名称一种汽车车灯随车转向系统(57)摘要本发明公开了一种汽车车灯随车转向系统,包括设置在方向盘内的角度传感器,角度传感器通过AD 转换电路连接主机,主机通过左从机和右从机分别控制左舵机和右舵机,转动方向盘,末端磁铁根据一定的传动比跟随转动,使角度传感器感应到相应的信号;通过AD 转换电路把角度传感器产生的信号输入到主机;主机把输入的角度信号,根据不同的模拟速度,通过运算得出舵机的控制转角值,并通过LIN 总线送到左、右从机;左、右从机分别识别到信号ID,并得到不同的转角值,输出特定的脉宽,控制舵机。
本发明的汽车车灯随车转向系统在汽车转弯时大灯灯头跟着转,照亮弯道内侧更多盲区,以便即时发现路上行人和障碍物,提高夜间行车安全性。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书1页 说明书2页 附图1页CN 106671869 A 2017.05.17C N 106671869A1.一种汽车车灯随车转向系统,其特征在于,包括设置在方向盘内的角度传感器,角度传感器通过AD转换电路连接主机,主机通过左从机和右从机分别控制左舵机和右舵机,转动方向盘,末端磁铁根据一定的传动比跟随转动,使角度传感器感应到相应的信号;通过AD转换电路把角度传感器产生的信号输入到主机;主机把输入的角度信号,根据不同的模拟速度,通过运算得出舵机的控制转角值,并通过LIN总线送到左、右从机;左、右从机分别识别到信号ID,并得到不同的转角值,输出特定的脉宽,控制舵机;光电开关识别到周围环境的明暗情况,判定是否打开前照灯;由按钮模拟不同的速度环境,使舵机在不同的速度下有不同的转角。
随动转向车灯毕业设计

随动转向车灯毕业设计摘要随着我国经济水平的提高和汽车工业技术的发展,对汽车安全性要求越来越高。
影响安全性的因素较多,有主动因素,也有被动因素,汽车车灯正常工作,能否保证驾驶员能即时给出行车信号和在夜间行车的良好视野范围是一个重要因素。
对汽车前照灯的控控已有成熟控制技术用于汽车,而对信号灯的控制较少[6]。
本文根据现有技术的情况,引入模糊控制技术,对汽车的前照灯进行较为全面的分析,同时对汽车的随动转向灯的结构和机械传动进行了设计。
本设计着重对以下问题进行了研究与探讨:1、对汽车车灯控制参量进行了研究分析,确定了合理的参数类型和数量,使系统开发具有可行性和实用性;2、把模糊控制理论应用于汽车前照灯的控制,并对控制器进行了设计;3、构建了随动转向灯的结构与传动。
关键词:随动转向灯;单片机;模糊控制;机械传动ABSTRACTWith the improvement of the economic level of our country and the development of the industrial technology of the automobile,the demands on the auto safety arehigher.There are mant safety factors which are active or passive.It is a important factor that automobile’s lights is normal which can give driving signals in light intime according to the driver and good field of view. The head lights are used to control by maturity control technology,bur single lights control less.The article uses fuzzy control technique to control totally auto head lights and work state ofsingle lights timely.It researches and probes for contents of intelligent control of auto lights,the principle of controlling and realization of the system of software and hardware.This text put great emphasos in to research and study below impaortant problem proceed detailed:First,researched the analyzed the parameters of auto lights,and make sure type and quantity of control parnmeters,so as to make it feasible and practical for developing system of auto lights control.Second,used fuzzy control technique theory for auto head lights and designed contriller.Third,probed realization of measuring technology by self and voice warning for auto signal lights.At last,structured intelligent control system of auto lights which core is single-chip computer MS-51.Key words: auto head lights,Directional headlamps,single-chop computer, Mechanical transmission,fuzzy control目录摘要 . I Abstract .. (II)第1章绪论 .. (1)1.1 汽车车灯的结构和类型.... . (1)1.1.1 照明装置. (1)1.1.2 信号装置 (2)1.2 汽车电子系统的发展状态. (2)1.3 汽车随动转向车灯控制国内外研究情况 (4)1.3.1 国内外研究现状 ..... (4)1.3.2 本文主要研究内容 (5)1.4 智能控制模式的确定 (5)1.5 本章小结....................... . (5)第2章汽车车灯智能控制系统总体方案 .................................... (6)2.1 单片机的发展 (6)2.2 MCS-51单片机的特点 (7)2.3步进电机控制系统 (10)2.4车灯随动转向控制系统的方案 (11)2.5 转角控制 (12)2.6 信号采集 (13)2.7 控制方法说明 (14)2.8 本章小结 (15)第3章蜗杆传动设计 ......... (16)3.1 蜗轮蜗杆的形成 (16)3.2 圆柱蜗杆传动的设计 (16)3.2.1 失效形式 (17)3.2.2 蜗杆设计 ....................... (22)第4章模糊控制理论及随动转向转角控制器 ............4.1 模糊控制原理 ........................................................4.2 模糊控制规则 ........................................................................................4.3 转向灯转动角度模糊控制器 .............................................................4.3.1 输入输出论域的确定 ...............................................................4.3.2 隶属度的确定 .............................................................................4.3.3 输入输出模糊变量的隶属度 ..................................................4.4 本章小结 .................................................................................................第5章利用Matlab软件对车灯转向模糊定义分析 ... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车车灯同步转向装置设计摘要随着公路的提速,汽车车高速行驶的安全问题也越来越被重视。
传统的汽车大灯照明采用固定方式,其光束会延弯道切线方向射出,形成弯道内侧照明盲区,汽车驾驶员无法观察到安全距离范围内的所有情况,存在较大的安全隐患。
因此,对汽车大灯的照明方式进行改进是非常必要的。
本论文针对国内汽车车大灯固定式照明现状,参考了一些相关的专利发明技术与实际汽车应用,提出了基于汽车运行图的机车大灯智能转向控制系统,使大灯控制系统在汽车进入弯道前的某个适当时机,提前控制大灯自动换向,保证大灯进入弯道时刚好转到需要的角度,从而使大灯光束始终照射在前方轨道的中心位置。
关键词:汽车大灯同步转向控制系统Auto lamp synchronous steering device researchAbstractThe potential safety hazard in the high一speed proeess of trains was proposed and paid more and more attention,with the development and the acceleration of trainsystem in recent years.The traditional fixed method of the train headlamp 15stationary model.The light will beam along the tangent line of the rail eurve,and itwill bring about a speeial blind area in the inside field of eurve.The potent ial dangerexsits in the high speed eireumstances beeause the driver ean’t earefully observeevery event in the safety area.So it is very essential to improve the lighting manner ofthe vehiele beam.This topie aims at dometie eurrent situation of fixed illumination of trainheadlamp.Referto some related patent teehnology, an intelligent steering controlsystem of headlamp whieh based on the train route map was put forward.Aeeordingto the eomputer centrally·controlled system and advantage of computer in for matization,the eontrol system of train headlamp eontrols automatie reversebefore a siutable time when train comes into the bend.Make sure that when traineomes into the bend,train headlamp turn to the required angle.And make the beam of train headlamp irradiate the central of front traek all the time.Keywords:Automotive headlight Synchronous steering Control system目录摘要 (I)Abstract ..................................................... I II 1 绪论. (2)1.1课题背景及意义 (2)1.2国内外研究现状和发展趋势 (2)1.3本文研究内容 (4)2 汽车车灯同步转向装置的应用 (4)2.1东风雪铁龙——凯旋 (5)2.2凯美瑞 (5)2.3新天籁 (6)2.4华晨宝马 (7)2.5新君越 (7)2.6途观 (8)3 汽车车灯同步转向工作原理 (14)3.1汽车车灯同步转向装置构想 (14)3.2汽车车灯同步转向装置工作原理 .............. 错误!未定义书签。
3.3钢丝拉索式车灯转向机构的主要特点 (14)3.4设计原理装配图............................ 错误!未定义书签。
3.5实现过程 (16)3.6材料选择 (16)4 总结和展望 (17)4.1论文的主要工作与总结 ...................... 错误!未定义书签。
4.2进一步的工作展望.......................... 错误!未定义书签。
参考文献.. (18)谢辞 (19)1 绪论1.1课题背景及意义车灯作为汽车功能的重要构成部分和车身外型的点睛之笔,其最基本的作用——安全,却常常被一些有车族忽视。
其实,车灯使用正确与否直接影响到有车族的行车安全,而大灯和安全尤其有着密切的联系。
据统计,60%的车祸都是因为视线不清造成的,因此,许多高档豪华车和欧洲车都把自动大灯作为一项重要且基本的主动安全配置。
灯光是驾驶员向外界传递的主要信息,也是夜间行车的重要保证,车灯出现故障或者灯光效能差会影响行车的安全,国内外很多车事故是与车灯有关。
由其是在夜间开车转弯时出现事故的情况由其多。
因为一般传统的汽车大灯都是直射的,车子晚上过弯的时候,根本无法照射到内侧,也就是我们常说的照明“盲区”,转向时静态大灯限制了驾驶者的视野,因此常常会产生"黑洞"。
如果没有及时发现弯道内侧的行人情况,很容易发生危险事故。
那么要解决驾驶员的视角盲区,就要求能使灯光能够照到转弯内侧部份。
而显然灯光是直身的不可能转弯,所以我们只有让灯旋转一些角度。
那么使灯与车轮同步旋转相同角度的话,也就能使灯始终与汽车行驶方向一致了。
这样就很好的解决了驾驶夜间转弯时出现的视用盲区了。
大灯只是车辆的一个部件,但往往在这种细节之处的改进可以让消费者得到更贴心的关爱。
见微知著,前大灯体现出的人性化科技内涵,是其整车开发思路的一个缩影。
所以解决这种给驾驶员带来安全隐患是我们设计的主要目的。
1.2国内外研究现状和发展趋势目前,在汽车前照灯的标准方面存在2种不同的标准:欧洲标准和美国标准,两者主要在近光配光上有较大的差别。
欧洲标准特别注重对眩光的控制,因此在其配光上存在15°的截止线。
并且照度也比较低。
而在美国,道路大多比较宽阔,因眩光没什么特别的要求,只要前照灯能够照得更远更亮就可以了。
但随着经济全球化进程的加快,人们迫切要求消除这两种标准之间的差别,建立一个统一的国际标准。
一种方法就是将两种标准中合理的部分综合起来,形成一个双方都能接受的标准,这就是所谓的国际协调。
另外一种方法就是建立一个包括多种功能的前照灯系统,它能根据不同的路况、天气而采用不同的照明方式,这就是AFS系统。
联合国欧洲经济委员会ECE No。
48/01法规中规定近光灯不应随转向角度而转动。
但随着AFS系统的成熟和广泛应用,欧盟委员会于2005年提交一项议案,建议允许欧盟25个成员国境内的汽车使用先进的AFS汽车前照灯,该议案在得到欧洲议会和欧盟理事会的批准后已经生效。
而在随后欧盟委员会颁布的ECE No。
48/02法规中,关于近光灯不应随转向角度而转动这一规定已经取消,AFS系统的使用得到了认可。
原来欧盟境内的汽车若想安装AFS~1照灯系统,需要极为复杂的审批程序。
新规定生效后,欧盟的相关审批程序大大简化。
我国国标GB4785- 1984 《汽车及挂车外部照明和信号装置的数量、位置和光色》的规定是参照联合国欧洲经济委员会ECE No。
48/01法规制定的。
按国情删去及修改部分内容外,其主要技术要求与ECE No。
48/01~ 规等效。
同样,国$~GB4785- 1984也有对近光灯不应随转向角度而转动的规定。
但随着ECE No。
48/02法规的修改,国标也将进行适当的修改,允许AFS系统的使用。
对夜间行车的安全性产生了飞跃性的提高,同时大大提升了行车照明的舒适性,这在日本和欧洲的汽车制造商中已经成为共识。
对于AFS前照灯系统的研究在国外已经取得了很大进展,日趋成熟。
日本、欧洲等国的知名汽车制造商都纷纷推出自己的AFS系统,在其高档轿车中标配AFS系统的同时,将AFS系统在中档甚至中低档轿车车型中作为选配列出,比如奥迪A8,宝马5系,梅塞德斯CLS、E系、M系,9kz~ B6,雷克~ RX330,丰田皇冠等。
在国外AFS系统已经得到广泛应用,国内在这方面的研究还比较少,加之引进的AFS系统大多为生产商本国道路状况考虑,且国内的道路状况也与日本和欧洲有较大不同,有自己的道路特点和地形地貌,因此AFS系统并不能发挥最大的作用,对AFS系统在国内的应用带来了阻力。
国内上海小糸已经对天津丰田锐志AFS前照灯完成了国产化开发工作,用于新款丰田佳美AFS前照灯系统业已完成,但其主要是以技术引进为主,自主研发AFS系统应用于实车批量生产的还没有出现。
虽然AFS系统已经投入使用,而且效果良好,但致力于行车安全的专家们并未满足于已经取得的成绩。
以德国海拉公司为首的汽车灯具巨头们正在考虑如何让车灯在多种复杂的道路状况下为道路使用者提供更好的照明。
一种多功能可变智能灯光系统 (VARILIS) 的新技术即将诞生,除了上述随动转弯功能之外,它将根据车速在不同范围产生不同的光型,如乡村灯光、城市灯光、高速灯光、远光等。
传统的双氙气前照灯中,遮光罩在远光和近光2个位置动作,动作时间为毫秒级,电磁阀拉动机械装置使遮光罩上下移动,从而使射灯系统分别发出远光和近光。
在VARILIS系统中,光源和透镜之间不是双氙气前照灯中的遮光罩,而是一个可旋转的柱体,该柱体表面有很多不同的形状,它转到不同的角度意味着不同的光型。
为了有效确定应该使用哪种照明状态并根据需要转换,由智能控制器处理各类传感器信号,例如光线传感器、日光传感器、速度传感器、转角传感器等。
随着科技的发展,AFS系统的光源也将不断改进。
目前AFS系统大多使用高强度气体放电灯 (HID,High Intensity Discharge Lamp)来取代卤钨灯。