浅谈现场总线CANBUS的应用
现场总线CAN-bus在智能楼宇中的应用

现场总线CAN-bus在智能楼宇中的应用智能小区通常所谓的智能小区技术即是在住宅小区内采用4C 技术(Computer 计算机、AutomaticControl 自动控制、Communication 通讯、ICCard 智能卡),建立一个由服务管理中心、接入网和家庭智能化系统组成的信息集成网络系统,对各种信息实现全面、实时、有效地接收、传递、采集和监控。
为住户提供一个安全、舒适、便捷、节能、高效的生活环境。
小区智能化系统,通常包括智能家居系统、安全防范系统、一卡通系统、停车场智能管理系统、全自动远程集中抄表系统、物业收费自动查询催收系统、楼宇自控系统、火灾报警与消防联动控制系统等。
安防系统和消防系统是至关重要的,应符合相应的行业规范。
在整个小区系统越来越大、功能越来越多的情况下,各系统之间和系统内部起连接作用的通讯(Communication)系统环节的作用和重要性日益增强,并在很大程度上影响到整个小区系统的性能。
通讯系统也根据功能分为:监测控制通讯、音频与视频通讯、电信通讯、互联网等。
其中“监测控制通讯”的通讯方式是本文讨论的重点。
CAN-bus 总线以前绝大部分的智能楼宇系统的数字量、信号控制与采集的通讯都是采用RS-485 总线,但是由于RS-485 的总线效率低、系统的实时性差、通讯的可靠性低、后期维护成本高、网络工程调试复杂、传输距离不理想、单总线可挂接的节点少、应用不灵活等不足和缺陷逐渐体现出来,越来越不能适应大中型智能楼宇的控制需要,并且带来更多的成本和维护费用。
虽然许多工程师、生产厂商等提出了改进的方法和建议,但都不能从根本上解决RS-485 这些先天性的问题。
所以,采用更好性能的通讯系统的措施势在必行。
浅谈can总线在汽车上的应用
浅谈can总线在汽车上的应用
CAN总线是指控制器区域网络总线,是一种基于串行通信的短距离通信协议,通常应用于汽车电子系统中,使得车辆内部的各种设备可以进行互联,从而实现车辆的智能化控制。
在汽车上,CAN总线可以应用于如下几个方面:
1. 发动机控制:汽车的发动机是最核心的部分,通过CAN总线连接发动机控制模块,可以实现发动机的高效控制,比如更好的加速和燃油经济性。
2. 刹车控制:刹车是汽车行驶中重要的控制部分,通过CAN 总线,可以实现刹车的智能控制,比如自动制动和紧急制动等功能。
3. 灯光控制:汽车灯光是行驶中的重要信号,通过CAN总线连接灯光控制模块,可以实现灯光的自动控制和节能减排,比如自适应大灯等功能。
4. 仪表板控制:汽车仪表板是车辆状态的直观反馈,通过CAN总线连接仪表板控制模块,可以实现多种状态的显示,比如车速、油量、排气等级等。
5. 座椅和空调控制:汽车座椅和空调是车内舒适性的重要组成部分,通过CAN总线连接座椅和空调控制模块,可以实现个性化的控制,比如温度和座位调节等功能。
总的来说,CAN总线在汽车中的应用非常广泛,可以实现车辆内部设备之间的互联和智能控制,从而使得车辆更加安全、节能、环保和舒适。
现场总线NCUC-Bus的技术特点与应用情况
制 ,保 障了通信 的可靠 性 要求 。通过 在一 些 高档
数控机床项 目中的实施 ,取 得 了 良好 的应 用效果 ,
验 证 了 N U —u 的有 效 性 。 C CB s
如 图 1所示 ,基 于 N U —u 的数控 系统 IC C CB s P 单元 ,是属 于嵌 入式 工 业计 算 机模 块 ,可 以运行 LN X、WID WS IU N O 操作系统 ,它具备 V A、U B、 G S R .5等 P J4 C机标 准接 口,可 以用 于数 控装置 H I M、 ML U及数控系统 内部职能模块 的控制 。
20 0 8年 2月 ,成 立 了 由华 中 数 控 、 大 连 光 洋 、沈
用 P Y+ P A的硬件 结构 ,整个 协议 的处理都在 H FG
F G 中 实现 ,并 通 过 主 从 总 线 访 问 控 制 方 式 实 现 PA
各站点 的有序通 信。N U —u 采 用动态 “ C CB s 飞读 飞
协议的数据交互 。
性 ,使得其 在 自动 化工 业 控制 领 域 ,尤 其是 数 控 领域 ,得到 了广泛 的应用 ,在高档数控机床 、数控 系统 IC单元等硬件平台如华 中 8型总线式数 控系 P
统上 ,都取得 了很好 的效果 。
21 02繁2 ・ E 1 5 期 WM M l 0
阳高精 、广州 数 控 、浙 江 中控组 成 的数 控 系 统现
场 总 线 技 术 联 盟 ( C U i fC i id B s , N no o hn F l u ) n a e
写 ” 的方式实现 数据 的上传 和 下载 ,实现 了通信 的实时性 要求 ;通过 延 时测量 和计 算 时 间戳 的方 法 ,实现 了通信的同步性要求 ;同时 ,采用重发 和
can总线技术的应用

CAN总线在工程机械中的应用一.CAN-bus总线简介:CAN-bus总线是国际上应用最广泛的现场总线之一,最初被设计用作汽车电子控制单元(ECU:Electric Control Unit)的串行数据传输网络,现已被广泛应用于欧洲的中高档汽车中。
近几年来,由于CAN-bus 总线极高的可靠性、实时性,CAN-bus总线开始进入中国各个行业的数据通讯应用,并在2002年被确定为电力通讯产品领域的国家标准。
CAN-bus网络使用普通双绞线作为传输介质,采用直线拓扑结构,单条网络线路可以连接到1。
CAN-bus 网络使用普通双绞线作为传输介质,采用直线拓扑结构,单条网络线路可以连接到110个节点。
当通讯距离不大于40米时,传输速率可达到1Mbps;当使用5Kbps传输速率(收发器PCA82C250/251支持),同一物理网络可达10公里的通讯距离。
CAN-bus总线的适用范围:可适用于节点数目比较多,传输距离在10公里以内,安全性、可靠性要求高的场合;也可适用于对实时性、安全性要求十分严格的机械控制网络。
目前,国内的汽车、电梯行业已是CAN-bus应用的典型领域,工业控制、智能楼宇、煤矿设备等行业也得到了广泛的应用。
二.CAN-bus 总线在工程机械中的应用由于嵌入式电脑、网络通讯、微处理器、自动控制等先进技术的日渐广泛应用,工程机械控制系统的性能和集成度已经有了很大的提高。
而CAN-bus总线由于良好性能,特别适合于工程机械中各电子单元之间的互连通讯。
随着CAN-bus总线技术的引入,工程机械中基于CAN-bus总线的分布式控制系统取代原有的集中式控制系统,传统的复杂的线束被CAN-bus总线所代替:系统中各种控制器、执行器以及传感器之间通过CAN-bus 总线连接,线缆少、易敷设,实现成本低,而且系统设计更加灵活,信号传输可靠性高,抗干扰能力强。
目前CAN-bus总线技术在工程机械上的应用越来越普遍。
canbus现场总线

canbus现场总线第三章 CANbus现场总线现场总线是安装在生产过程区域的现场设备仪表与控制室内的自动控制装置系统之间的一种串行、数字式、多点通信的数据总线。
现场总线(Fieldbus)技术是实现现场级控制设备数字化通信的一种工业现场层网络通信技术,可使用一条通信电缆将现场设备(智能化、带有通信接口)连接,用数字化通信代替4-20mA/24VDC信号,完成现场设备控制、监测、远程参数化等功能。
CAN,全称为“Controller Area Network”,即控制器局域网,由德国Bosch 公司最先提出,已成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。
CAN是一种多主方式的串行通讯总线,CAN的规范定义了OSI模型的最下面两层:数据链路层和物理层。
CAN 协议有2.0A和2.0B两个版本,CAN协议的2.0A版本规定CAN 控制器必须有一个11位的标志符,在2.0B版本中规定CAN控制器的标志符长度可以是11位或29位。
第一节 CAN通信协议3.1.0协议特点CAN总线是一种串行数据通信协议。
它有如下特点:1、CAN协议分层分为目标层、传输层、物理层。
目标层的功能:确定要发送的报文、确认传输层接收到的报文、为应用层提供接口。
传输层的功能:帧组织、总线仲裁、检错、错误报告、错误处理。
物理层的范围包括实际位传送过程中的电气特性。
2、CAN协议逻辑位使用2种逻辑位表达方式。
当总线上的CAN控制器发送的都是弱位时,此时总线状态是弱位(逻辑1);如果总线上有强位出现,弱位总是让位于强位,即总线状态是强位(逻辑0)。
上有强位出现,弱位总是让位于强位,即总线状态是强位(逻辑0)。
3、CAN协议校验.采用CRC校验并可提供相应的错误处理功能,保证了数据通信的可靠性。
4、CAN协议编码方式.使用了数据块编码方式,使得网络内的节点个数在理论上不受限制。
5、CAN协议数据块的长度.规定了数据块的长度最多为8个字节,传输时不会过长占用总线,保证了通信的实时性。
canbus总线
CAN总线1. 简介CAN(Controller Area Network)总线是一种串行通信协议,广泛应用于汽车、工控等领域中。
它是一种高可靠性、高抗干扰的通信方式,具有多主机、多从机的结构,能够支持多个节点之间的通信。
2. CAN总线的特点2.1 高可靠性CAN总线采用差分传输方式,通过在两条通信线上分别传输互补的信号来实现数据传输,可以有效地抵抗传输线上的电磁干扰和噪声。
此外,CAN总线拥有校验机制,当数据传输过程中发生错误时,接收端可以通过异或校验位来检测错误,并进行纠正。
2.2 多主从结构CAN总线可以支持多个主机和多个从机的通信。
主机用于发送命令和控制数据的节点,从机用于接收并执行命令的节点。
这种结构使得CAN总线非常适用于分布式控制系统,能够实现多个节点之间的实时通信。
2.3 高速通信CAN总线的通信速率可以达到几百kbps甚至几Mbps,可以满足多数应用的通信需求。
高速通信可以保证节点之间的实时性,并且降低通信延时。
2.4 灵活的网络拓扑结构CAN总线支持多种网络拓扑结构,包括总线型、星型、树型等。
这种灵活的结构使得CAN总线可以适用于不同的应用场景,如汽车电子系统中的各种控制模块之间的通信。
3. CAN总线的应用3.1 汽车领域CAN总线在汽车领域中得到了广泛应用。
汽车中有许多控制模块,如发动机控制单元(ECU)、制动控制单元(BCU)、车身控制单元(BCU)等,这些模块之间需要进行实时通信才能保证汽车的正常运行。
CAN总线通过其高可靠性和实时性,成为了汽车电子系统的首选通信协议。
3.2 工控领域在工控领域中,CAN总线也得到了广泛应用。
工控设备通常需要各种传感器和执行器之间的实时通信,以实现工艺过程的监控和控制。
CAN总线可以提供高可靠性的通信,并且支持多主从结构,非常适用于工控场景。
4. CAN总线的实现4.1 硬件实现CAN总线的硬件实现主要包括CAN控制器和CAN收发器。
CAN总线的应用分析

CAN总线的应用分析CAN(Controller Area Network)总线是一种广泛应用在工控、汽车、航空航天等领域的串行通信总线协议。
本文将对CAN总线的应用进行分析。
首先,CAN总线在汽车行业的应用非常广泛。
现代汽车中的许多系统都采用了CAN总线进行通信,如引擎控制单元(ECU)、制动系统、仪表盘、电子稳定控制系统(ESP)、空调系统等。
CAN总线的高可靠性和实时性使得汽车系统能够高效地进行数据交换和控制。
其次,CAN总线在工控领域的应用也非常普遍。
工控系统中需要将各个设备和节点进行连接和通信,CAN总线作为一种性能稳定的通信手段被广泛应用。
例如,工厂生产线上的各种传感器、执行器、PLC等设备可以通过CAN总线进行数据交换和控制。
CAN总线的高实时性和抗干扰能力使得工控系统能够实现稳定可靠的数据传输和控制。
此外,CAN总线也在航空航天领域得到广泛应用。
在飞机上,各种系统需要进行通信和数据交换,如发动机控制系统、驾驶舱仪表系统、通讯系统等。
CAN总线被广泛应用于这些系统之间的数据传输和协调控制,其可靠性和实时性能够满足对航空航天设备的高要求。
另外,CAN总线在物流、农业、能源等领域也有着重要的应用。
在物流领域,CAN总线可以用于卡车和物流设备之间的数据传输和控制,实现物流操作的智能化和自动化。
在农业领域,CAN总线可以用于农机设备和传感器之间的数据交换和控制,提高农业生产的效率和智能化程度。
在能源领域,CAN总线可以用于电力设备之间的数据传输和控制,实现能源系统的监控和调节。
总之,CAN总线作为一种高可靠性和高实时性的串行通信总线协议,被广泛应用于汽车、工控、航空航天、物流、农业、能源等领域。
它能够满足各种系统之间的数据传输和控制需求,实现系统的智能化和自动化。
随着技术的不断发展,CAN总线的应用领域将更加广泛,并且在各个领域中的应用也将更加深入和成熟。
CANbus现场总线应用方案

书山有路勤为径;学海无涯苦作舟
CANbus现场总线应用方案
前言
2003年5月6日,PHILIPS正式授权:广州周立功单片机发展有限
公司为汽车电子产品线(含CAN-bus、汽车防盗器RFID、汽车传感器)中国地区代理商。
依靠强大的专业开发团队、PHILIPS半导体的领先技术与国际CiA
协会、ODVA协会的支持,我们致力于发展中国的CAN产品与应用事业。
至现在,我们已成功开发出一系列CAN-bus教学、接口、工具、应用产品,
能够为客户提供从“芯片”、“工具”、“模块”、“方案”等各个方面的服务,
涉及CAN-bus多个行业与应用领域。
我们自主开发的数个型号产品已经领
先于国外技术水平,并已投入广泛的实际应用。
CAN-bus介绍
CAN-bus(Controller Area Network)即控制器局域网,是国际上
应用最广泛的现场总线之一。
起先,CAN-bus被设计作为汽车环境中的微
控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系
统中,均嵌入CAN控制装置。
CAN-bus是一种多主方式的串行通讯总线,基本设计规范要求有高
专注下一代成长,为了孩子。
CAN-bus现场总线应用方案(电梯控制)

CAN-bus现场总线应用方案(电梯控制)前言PHILIPS 授权:广州周立功单片机发展有限公司为汽车电子产品线(含CAN-bus、汽车防盗器RFID、汽车传感器)中国地区代理商。
依靠强大的专业开发团队、PHILIPS 半导体的领先技术与国际CiA 协会、ODVA 协会的支持,我们致力于发展中国的CAN 产品与应用事业。
至现在,我们已成功开发出一系列CAN-bus 教学、接口、工具、应用产品,能够为客户提供从“芯片”、“工具”、“模块”、“方案”等各个方面的服务,涉及CAN-bus 多个行业与应用领域。
我们自主开发的数个型号产品已经领先于国外技术水平,并已投入广泛的实际应用。
CAN-bus 介绍CAN-bus(Controller Area Network)即控制器局域网,是国际上应用最广泛的现场总线之一。
起先,CAN-bus 被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU 之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN 控制装置。
CAN-bus 是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。
当信号传输距离达到10Km 时,CAN-bus 仍可提供高达5Kbps 的数据传输速率。
由于CAN 串行通讯总线具有这些特性,它很自然地在汽车、制造业以及航空工业中受到广泛应用。
作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN-bus 已被广泛应用到各个自动化控制系统中。
从高速的网络到低价位的多路接线都可以使用CAN-bus。
例如,在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域,CAN-bus 都具有不可比拟的优越性。
CAN-bus 通讯电路CAN-bus 通讯单元电梯控制系统的控制部分由电梯主控制器、轿厢控制器、楼层控制器(多套)、群控器组成,通过CAN-bus 接口连接成一个完整的通讯网络,实时传输各运行参数、控制命。
现场总线的原理与应用

现场总线的原理与应用1. 引言现场总线(Fieldbus)是指用于工业自动化领域的数字通信总线技术,广泛应用于工厂自动化控制系统中。
现场总线连接了各种感应器、执行器和控制设备,实现数据传输、实时控制和监测功能。
本文将介绍现场总线的原理和应用。
2. 现场总线的原理现场总线通过将数据进行数字化和通信,实现了系统的联网和集成化。
其原理主要包括以下几个方面:2.1 数据传输方式现场总线采用异步传输方式进行数据的传输,每个节点都具有唯一的地址。
数据传输可以是双向的,节点可以发送和接收数据。
现场总线支持点对点或多点通信方式,节点之间可以直接进行数据交互。
2.2 数据传输协议现场总线使用特定的数据传输协议,确保数据的可靠传输和完整性。
常见的现场总线协议包括Profibus、Foundation Fieldbus、Modbus等。
这些协议定义了数据的格式、传输速率、校验等参数。
2.3 总线拓扑结构现场总线可以采用不同的拓扑结构,常见的有星型、环型、总线型等。
选择合适的拓扑结构可以根据系统需求和通信距离来确定。
拓扑结构的选择影响了总线的可靠性和性能。
3. 现场总线的应用现场总线在工业自动化领域有广泛的应用,以下列举了一些常见的应用场景:3.1 工厂自动化控制系统现场总线可以应用于工厂自动化控制系统中,连接和控制各种设备,如传感器、执行器、PLC等。
通过现场总线,可以实现实时数据的采集、设备的控制和监测,提高工厂的自动化程度和生产效率。
3.2 智能建筑系统现场总线可以用于智能建筑系统中,连接和控制照明、空调、安防等设备。
通过现场总线,可以实现对设备的集中控制和监测,提高建筑的能耗管理和智能化水平。
3.3 交通信号控制系统现场总线可以用于交通信号控制系统中,连接和控制交通信号灯、指示器等设备。
通过现场总线,可以实现实时的信号控制和交通流量的监测,提高交通效率和安全性。
3.4 水处理控制系统现场总线可以应用于水处理控制系统中,连接和控制水泵、阀门等设备。
现场总线及其应用技术

现场总线及其应用技术一、引言现场总线(Fieldbus)是指在工业自动化控制系统中,用于连接现场设备的一种通信总线技术。
它通过集成控制器和现场设备之间的数据交换,实现工业自动化系统的控制与监测。
本文将介绍现场总线的基本概念、工作原理以及在实际应用中的一些技术。
二、现场总线的基本概念现场总线是一种将传感器、执行器等现场设备与控制器相连的通信系统。
它能够提供双向通信、实时数据传输和分布式控制等功能,极大地简化了工业自动化系统的布线和维护工作。
常见的现场总线包括Profibus、Modbus、CAN等。
三、现场总线的工作原理现场总线的工作原理可以简单描述为以下几个步骤:1. 传感器或执行器将采集到的数据通过现场总线发送给控制器。
2. 控制器接收到数据后,进行处理并发送相应的控制指令给现场设备。
3. 现场设备接收到控制指令后,执行相应的动作,并将执行结果反馈给控制器。
四、现场总线的应用技术1. 实时性技术现场总线要求具有较高的实时性,能够在短时间内完成数据的传输和处理。
为了提高实时性,现场总线采用了一系列技术,如时间触发、通信速率调整和数据压缩等。
2. 安全性技术现场总线在工业自动化系统中承担着重要的控制和监测任务,因此安全性是其应用中的重要考虑因素。
现场总线采用了多种安全技术,如数据加密、身份认证和访问控制等,保障系统的安全运行。
3. 故障诊断技术现场总线能够实时监测现场设备的状态,并提供故障诊断功能。
通过采集设备的运行数据和故障信息,现场总线可以及时判断设备的工作状态,并进行故障定位和排除。
4. 网络管理技术现场总线通常由多个设备组成一个网络,因此需要进行网络管理。
网络管理技术包括网络拓扑结构的设计、数据包的路由和转发、网络性能的监测和调优等,保证网络的稳定和可靠运行。
5. 数据采集与处理技术现场总线能够实时采集大量的数据,并进行处理和分析。
数据采集与处理技术包括数据采样、滤波、数据压缩和数据存储等,为后续的控制和决策提供可靠的数据支持。
浅谈现场总线CANBUS的应用

}V A W IV j
} 小 统 点} 最 系节
与C N B。C N A 支持标准的1 A 2 . 0 A 2 . 0 1位标识符.C N A
规范的目 的是为了在任何两个基于C N U 的仪器之间建立兼容 ABS 性规范定义了传输层及 C N 协议在周围各层当中所发挥的作用。 A
CNU 遵从 O I ABS S 模型,主要工作在数据链路层和物理层, 是一种多主方式的串 行通讯总线基本设计规范。C N U A B S要求有
Ou lo t a pct n CANBUS t k h p lai o o e i o f o te ed u h f l b s f i
和C N . 两种技术规范.我们在开发中用到了上面提到的两款 A 2B 0 芯片,实践证明 控制这两款芯片的程序具有很强的可移植行,方便 了开发工作.
C AN控创器
及陇动 各
22 开发模式 .
CNU A B S一般系统可以 这样描述,如图 1 所示.
} P C机 }
图 t N U C B S一般莱统 A 2 B同时支持标准的 1 . 0 1位标识符和扩展的2 9位标识符C N 0 A 2 .
在生产控制室内的自 动化装置主要是指 P C机,而 C N U ABS 系统的开发也主要是C N U 接口适配卡、智能传感器节点、最 ABS
尹 经验交流
m m r i) e o Ls y t
{
仪器仪表用户
该 循环的执行时间为 1 m 。如果我 6 s 0 们不用专用的内 存管理
器,而是用驮认的内存管理器,执行上面相同的循环,所用的时间 为 91 s 3m ,速度提高了5 倍。 . 8 5 结论
m m rLs 二m m r i-nx; eo i y t e o Ls> et y t
现场总线CAN-BUS在远程抄表系统中的应用

●Hale Waihona Puke 现场总线 C N- US在远程 抄表 系统 中 的应 用 A B
崔 志 辉
( 台河市 佳实 电力 工程股 份有 限 公司 七 台河 1 40 ) 七 56 0 [ 摘 要] 介绍 了利 用现 场总 线 C N B S技术实 现 远程抄 表 系统 的一 种解 决方 案 。同 时阐述 了系 统 的结构 、流 程和特 点。实现 对 电表数 据 的实 时采集 、 A — U 一 传输 、存 储 以及 显示 等 功能 。 实验 和现 场运 行表 明 G N总线 具 有造 价低 , A 可靠 性 高等 优 点, 电力 系统 中有 着 广泛 的应 用 前 景。 在 [ 键词 ]A 关 C N总线 远程 抄表 系统 中图分 类号 :P 7. T 24 2 文献 标识 码 : A 文 章编 号:0 99 4 (00 2— 2 50 10 1X 2 1) 40 7— 1
C N 线简介 A总 C N全称 为 “ o t o 1 r A e e w r ” 即控制 器局 域 网, 国际上 A C n r 1e ra N t o k , 是 应用最 广泛 的现场 总线 之一 .A 最 初出现 在 8 年代 末的汽 车工 业 中, CN 0 由德 国 B s h 司最先提 出。一个 由C N oc 公 A 总线 构成 的单 一 网络中 , 论上 可 以挂 接无 理 数个节 点 。实 际应 用中, 点数 目受 网络 硬件 的 电气特 性 所 限制 。C N可提 节 A
系统 的构 成 本文 提 出的 电力 集 中抄表 系统采 用三 层体 系结构 。其第 一层上 位机 服务 器, 其主 要 作用是 负 责存 储 多功 能电表 的 数据 、实现 对仪 表 的远 程监 控 、远 程 控制 等功 能 。服 务器通 过 M d m与 下位 机进 行 数据 通信 。 oe 第二 层是集 中器 。集 中器通过 M d m与上位 机服 务器 相连 , oe 通过 C N总 A 线 与第 三层 的采集 终端 相 连 。主要 打两 项任 务 : 是完成 与采 集器 的 数据通 一 信 工作, 向采 集器 下达 电量 数据 冻结 命令 , 时循环 接 收采 集器 的 电量数 据 。 定 另外 的任 务就是根 据系统要 求完 成与上 位机服 务器 的通信, 将用 户用 电数据 等 主 站 需要 的 信息 传 送 到主 站 数据 库 中 。 第三层 是采 集器 , 采集 器 可实现 对 各种 各样 电表的采 集 。采集 器 可 同时 采集 、存 储 6 4块 电表 的数据 , 采集 器 除 了完成 电表 的 电量 数据采 集 工作 以
现场总线NCUC-Bus的技术特点与应用
期 通 信 。周 期 通信 可 以 完 成 主设 备 和从 设 备 问 实时
设 备 为 主 设 备 ,不 能 主 动 发 起 总 线 通 信 、只 能 被
动 响应 的 总 线 设备 称 为 从 设 备 。 基于 NCUC Bu s
信息 ( 如伺服控制指令 、实时状态等);非周期通
信 则 实现 非 实 时信 息 ( 如监 控 、诊 断信 息 状 态 等 )
圈 圈
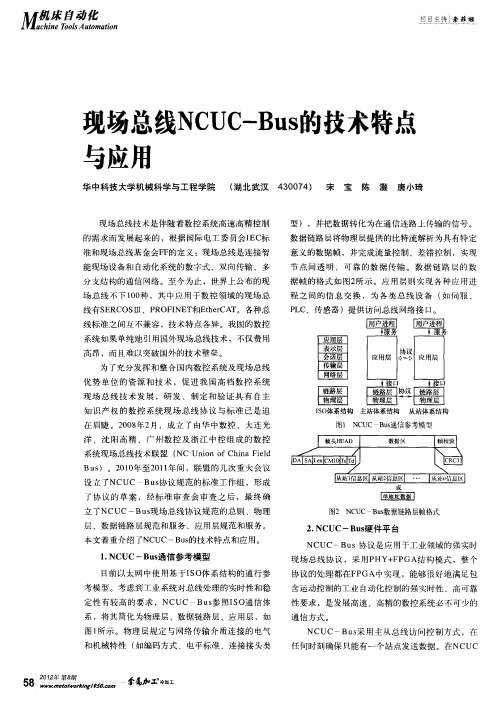
IO体系结构 S
知识产权 的数控 系统 现场总线协 议与标准 已是迫
在 眉 睫 。2 0 年 2 ,成 立 了 由华 中数 控 、大 连 光 08 月 洋 、沈 阳 高 精 、广 州 数 控 及 浙 江 中控 组 成 的 数 控
系 统现 场 总线 技 术联 盟 ( ino hn il NC Uno fC i aF ed
协议包括延时测量和时钟 同步两个步骤 。延时测量
用 于 测 量 数据 帧在 现 场总 线 网络 中 的总 环路 时 间和 主 站 到 各从 站 的 延 时 ;时 钟 同 步通 过 主 站发 送 的 时 间基 准 和 从 站 延 时 同 步 各从 站 时 钟 。NC UC—B s u
3 NC C—B s 信实时性技术 . U u通
准和现场总线基金会F 的定义:现场总线是连接智 F
能 现场 设 备 和 自动 化 系统 的 数 字式 、双 向传 输 、 多 分 支 结 构的 通 信 网络 。至 今 为 止 ,世 界上 公 布 的现 场 总 线 不 下 1 0 ,其 中应 用 于 数 控 领 域 的现 场 总 0种 线有 S R O Ⅲ 、P O I E  ̄Eh r A 。各 种 总 E C S R FN T N teC T 线标 准 之 间互 不兼 容 ,技 术特 点 各异 。我 国 的数 控
浅谈can总线在汽车上的应用

浅谈can总线在汽车上的应用
CAN总线是汽车电子系统中常用的一种总线技术,具有广泛的应用。
CAN总线通过三线式传输方式进行数据通信,可实现多节点通信、数据实时传输和高可靠性。
在汽车上,CAN总线应用于多个方面,包括引擎控制、底盘控制、车身电子和仪表盘控制等。
本文将详细介绍CAN总线在汽车上的应用。
引擎控制
CAN总线可以用于汽车引擎控制,包括点火控制、燃油喷射、排放控制等。
CAN总线能够将各种传感器的测量数据实时传输到控制单元,并快速响应引擎工作条件的变化,以提高发动机性能和燃油经济性。
例如,当发动机冷却液温度过高时,控制单元可以实时调整燃油喷射量和点火时机,以保持发动机稳定工作状态。
底盘控制
CAN总线可用于汽车底盘控制系统,包括ABS、牵引力控制和电子稳定控制等。
CAN总线可以实时监测车轮速度、制动、悬架等信息,并快速响应底盘状态的变化,例如,当车辆在急转弯或溜车时,电子稳定控制系统可以通过CAN总线向ABS传递指令,实时调整车轮制动力和牵引力,实现减速或保持车辆稳定的控制。
车身电子
CAN总线可用于汽车车身电子系统的控制,包括车门锁、安全带预警、雨量感应器、中央多媒体控制等。
通过CAN总线,这些电子组件可以实现相互连接和通信,控制车辆的各项功能,例如,当安全带没有系好时,控制单元可以通过CAN总线向车辆仪表盘发送预警信号,提醒驾驶员注意。
CAN总线可用于汽车仪表盘控制系统。
汽车仪表盘需要实时收集车辆发动机、底盘等各种状态数据,并将其转化为图形显示,以告诉驾驶员车辆的行驶信息。
通过CAN总线,仪表盘可以实现对多个传感器信息的采集和处理,并实时向驾驶员提供相关数据。
第2章-现场总线CAN-Bus
现场总线(Fieldbus)是自动化 系统中一种把大量现场级设备和 操作级设备相连的工业通讯系统。 定义:一种用于智能化现场设备 和自动化系统的开放式,数字化, 双向串行,多节点的通信总线。
汽车领域
简单例子: 1、工业控制:化工厂数据监控与处理 2、汽车领域:几乎任何汽车里,都存在CAN总线(安全气囊) 3、电梯:每层的上下按键节点都是通过总线与主控制器相连。
基础概念
1.1基础概念
国际标准化组织ISO对通信系统的详细划分,以打电话为例进行讲解:
最高层。用户、软件、网络终端等之间用来进行信息交换 将两个应用不同数据格式的系统信息转化为能共同理解的格式 依靠低层的通信功能来进行数据的有效传递 两通信节点之间数据传输控制,操作如:数据重发,数据错误修复 规定了网络连接的建立、维持和拆除的协议,如:路由和寻址 规定了在介质上传输数据位的排列和组织,如:数据校验和帧结构 规定通信介质的物理特性,如:电气特性和信号交换的解释
根据应用领域不同,世界上存在很多种现场总线。
多点通信:在同一个通信 能够满足工业控制现场复 网络上可以挂接多个设备。 杂环境、实时通信、抗干
扰等方面的要求。
(1)1983年,由Bosch与Intel公司为了减少汽车电缆 数量而开发CAN-bus。 (2) 1986年,正式发布。 (3) 1989年,宝马推出第一款使用CAN-bus通信的汽 车。车上电缆质量减少了50kg。
基础概念
1.2CAN总线简介
OSI模型与CAN-Bus的对应关系 CAN-bus规范定义了ISO模型中的物理层和数据链路层。
物理层 CAN收发器( 举例:PAC82C51 )
数据链路层 CAN控制器( பைடு நூலகம்例:SJA1000 )
CAN-bus现场总线在汽车中的应用

CAN-bus现场总线在汽车中的应用对于CAN 在汽车上的应用,具有很多行业标准或者是国际标准,比如国际标准化组织(International Organization for Standardization)的ISO11992、ISO11783 以及汽车工程协会(Society of Automotive Engineers )的SAE J1939。
CAN 总线已经作为汽车的一种标准设备列入汽车的整体设计中。
对此,很多世界级的半导体厂商专门针对CAN 总线在汽车上的应用,提出了自己的全套解决方案。
下图是PHILIPS 半导体公司的汽车网络解决方案。
通过上图可以看到,蓝色较粗线代表CAN 总线,它连接了传动装置控制单元、灯控单元、门控单元、座椅控制单元以及仪表盘控制单元等等。
红色较细线代表LIN 总线,由LIN 总线构成的LIN 网络作为CAN 网络的辅助网络,连接了车窗控制单元、雨刷控制单元、天窗控制单元等低速设备。
LIN 网络(Local Interconnect Network),由汽车厂商为汽车开发,作为CAN 网络的辅助网络,目标应用在低端系统,不需要CAN 的性能、带宽以及复杂性。
LIN 的工作方式是一主多从,单线双向低速传送数据(最高20K 位/秒),与CAN 相比具有更低的成本,且基于UART 接口,无需硬件协议控制器,使系统成本更低。
在未来的汽车中,由汽车厂商和半导体厂商共同组成的团体FlexRay Consortium,致力于发展更高速的、具有容错性的、支持分布式控制系统的总线“X-by-Wire”,X-by-Wire 的通信速率将达到10M。
届时,X-by-Wire 将和CAN、LIN 一起组成整个汽车的通信控制网络。
下图为具备X-by-Wire 的概念车型。
ECU 中的CAN 电路- CAN 控制器+CAN 收发器- CAN 控制器+CAN 收发器+LIN 收发器下面的电路图为在汽车电子ECU 设计中推荐使用的电路图。
现场总线CAN-bus 在煤矿通讯中的优势

现场总线CAN-bus 在煤矿通讯中的优势煤矿生产是与国计民生密切相关的一个领域。
其中,煤矿平安无疑是大家关注的热点之一,不仅对社会经济有影响,更关系到每个矿业人员的生命平安。
煤矿系统中原先的各类独立设备已经不能够满足现代化煤矿生产的需求;组建一个技术先进的煤矿通讯网络,对煤矿的工作人员、现场环境参数进行监测、控制,形成一个能够满足地域化控制、符合煤矿平安要求的煤矿数据/信息管理系统,这已经是煤矿行业的开展大趋势。
煤矿企业内部通过煤矿通讯网络传输各类现场数据;通常传输的是来往于各个现场设备之间的控制类数据,一般都属于小流量、实时数据。
煤矿通讯主要涉及以下两个方面的应用:●考勤和巡检系统●作业现场环境监测同时,煤矿通讯具有非常明显的自身行业特点:●设备符合本质平安要求●现场环境恶劣●通讯距离较远●数据传输要求可靠实时●同一网络设备节点较多按国家对煤矿企业中现场通讯设备的参数要求,目前在煤矿行业中可运行的常见通讯方式有串行通讯RS-485、现场总线CAN-bus、调制解调Modem、无线通讯等几种方式。
本文将比照这几种通讯方式,并结合实际工程的运行经验,从而汇总一些煤矿行业应用现代化通讯的特点、优势,并且介绍现场总线CAN-bus 的主要优势。
1、串行通讯RS-485国际EIA 协会在1983 年制定了RS-485 标准,这是一个串行通讯的电气标准。
与第一代的RS-422 标准相比,RS-485 标准支持多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围。
RS-485 标准是一种实现本钱较低的多点网络通讯方式,通用RS-485 收发器的价格低于10 元/个;RS-485 网络是最常见到的通讯方式之一,单一网络能够连接32 个节点,通讯距离够到达1200 米;RS-485 设备可以基于普通单片机UART 端口进行开发,电路设计简单。
在工业自动化设备、分布式数据采集、楼宇安防、早期的煤矿网络等领域,RS-485 设备是最常见到的通讯设备之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(
’
S me ig ary 10 ] o Th ra [O 0; n S me ig:e e it o Th : wM mL s0; n n
fr n o j< 50 j + o( t i J= ; 0 ;+ ) (
friti= O o( n ;i< 10 ;i+ 00 + )
摘要 : C N U A B S是 国际上应用最 广泛 的现 场总 线之一 。作 为一种技 术先
进 .可靠性高,功能完瞢 ,成本合理 的远程 网络通讯控制方式 , C N U A B S 已被广泛应用到各个 自动化控制系统 中。 关键词: C N U ; A B S 现场总线 ;网络通讯 ;自动化控制 中田分类号 :T 3 6 文献标识码 : B P3
域中最活跃的一个领域 ,已成为工业数据 总线领域 的一 个新 热点. 现场总线 【】 1 可分为 CANBUS Co t l rAra Newo k ( nr l e t r)、L oe ON WORK ( o a Op rt g S L cl eai Newo k ) P n t rs 和 ROF I BUS (rc s pe es Fed Bu ) il s 等。 CANBUS是重要的现场总线之一.
维普资讯
●
me rLs) moy i t
(
me o y s = me o yLit>ne t m r Lit m r s一 x;
该循环 的执行 时间为 10 .如果我们 不用专 用的 内存 管理 6 ms 器,而是用默 认的内存 管理器,执行上面相同的循环,所用的时间
作者声明: 自愿将本文稿 酬捐为 。 仪嚣仪表用户杂志爱・ 助学基金
文章编号: 1 7 -0 12 0 )3 们 4 -2 11 4 ( 0 60 - 00 6
浅 谈 现 场 总 线 C B S的应 用 AN U
刘 琦
( 天津 城市 建设 学院 电子 与信 息 工程 系,天 津 308 ) 03 4
参考文献 【】 rc c e. + 1 B ue E k 1 +编程思想 ( 2 ):第一卷 :标准 C +引导 C 第 版 +
】 北京 :机械工业出版社, 2 0 . 3 53 4 . 0 29 0 -2 . . 【】 c t Me es r f∞f e C +M】北京 :中田电力出版社。 2 S ot y r. e E f i + 【 . Mo ; v
Chn ) ia 、
Ab ta t sr c : CANBUS S i on o t e e f h ap l a i n f h b o d s f l pi to o t e r a e t i d c e
C NB S遵 从 O I A U S 模型 ,主要工作在数据 链路层和物理 层, 是一种多主方式 的串行通讯总 线基本 设计规 范. C N U A B S要求有 高的位速 率高抗 电磁干扰性 ,而且 能够检测 出产生 的任何错误。主 要特性 【 如下:总线仲裁 :低成本 的现场 总线 :极高的总线利用 2 】 率 :很远的数据传输距离 ( 长达 lk ; O m)高速 的数据传输速 率 ( 高 达 I p ) 可根据报文 的 I 决定接 收或屏 蔽该报文 :可靠的错误 Mb s ; D 处理和检错机制 :发送 的信息遭到破坏后可 自 动重发 :节点在错误 严重的情况下具有 自动退出总线 的功 能:报文不包含源地址或 目标 地址仅用标志符来指示功能信息优先级信息等等. 2 应 用
(
aryi n w o T ig i ra [ 】= e S me hn ( ; )
)
fri= o o( ;i< 10 ;i+ 00 + )
(
d lt ra [ ; eee aryi ]
【】D vB laD vd Mahw 提 高 C +性 能的 编程 技 术 【 . 3 o uk ,ai y e . + M】北 京 :清华大学 出版社 。 2 O .. -5 0 36 56 . 5
为91 3ms.速度提 高了 58倍. .
d lt[ et t; eee】n xP r
) ) 为 了测试专用 的内存管理器,我们执行如下测试:
itma ( n i单线程环境 中执行 ,所 以我们的 S me h g 内 o Ti n 存管理子程序 不受并发 问题 的干 扰. 由于我 们不用担心任 何临界 区,所 以不对 内存管理进行保护 .我们也充 分利用了所有分配 的内 存空间大 小相 同的事实—— 即为 S me h g对象 的大小.固定大 o Ti n 小的内存分配要简单得 多。要执行 的计算少 了很 多 ( 比如查找下一 个能够满足需求 的足够大 的内存块) .所有这些都使得专用内存管 理器的效 率获得 了极大 的提高 .所 以在特 定情况下 ,使用专用 内存 管理器可 以提高应用程序 的效率 .●
作者 简介 :宋伟 ( 9 0) 男,硕士研究生,主要研 究方向:C D 技术和数 18 - , A 据库技术:杨连贺 ( 9 5) 男,教授,博士生导 师,主要研究方向:计算机 16 ・ , 仿真与辅助设 计.数据库应 用.
) )
S me hn : eee mLi 0; o T ig: ltMe d s t
Ou lo h p l a i n o t k t e a p i t f CANBUS o c o
o h i l s f t e f d bu e
L U Qi I (Ee t n & Ifr t n n ie r g e a me t l r i co c nomai e gn ei D p d n, o n Ta j n tueo ra o srcin Ta j 0 3 4 ini lsi t fUb n C n t t 。 inl 3 0 8 n t u o n