用面向对象方法设计无人直升机信息处理系统
面向无人机的自动飞行控制系统设计与实现

面向无人机的自动飞行控制系统设计与实现自动飞行控制系统是无人机技术中至关重要的一部分,它能够使无人机在航线规划、导航、引导和飞行控制等方面实现自主化和智能化。
本文将讨论面向无人机的自动飞行控制系统的设计与实现,包括系统结构、工作原理和关键技术。
一、系统结构面向无人机的自动飞行控制系统通常由传感器、计算单元、执行单元和通信模块等组成。
传感器用于采集环境信息和飞行器状态,如GPS、气压计和陀螺仪等。
计算单元负责处理传感器数据并生成飞行控制指令,为无人机提供实时导航、避障和飞行控制功能。
执行单元根据计算单元的指令,控制无人机的发动机、舵机和螺旋桨等执行器,完成飞行任务。
通信模块用于无线传输控制指令和接收飞行器状态信息。
二、工作原理面向无人机的自动飞行控制系统的工作原理主要包括飞行计划生成、传感器数据处理、导航控制和飞行监测等环节。
首先,飞行计划生成模块根据用户输入的目标位置和飞行要求,生成一条航线规划方案。
其次,传感器数据处理模块负责采集环境信息和飞行器状态数据,如位置、速度和姿态等。
根据传感器数据,导航控制模块利用算法计算飞行器的姿态、位置和速度等信息,并生成飞行控制指令。
最后,飞行监测模块实时监测飞行器的状态和环境信息,进行飞行数据分析和故障诊断。
三、关键技术1. 航线规划算法:根据无人机飞行要求和环境条件,设计高效的航线规划算法可以实现飞行器的安全、高效地到达目标位置。
常用的航线规划算法包括A*算法和最小时间路径规划算法等。
2. 导航控制算法:导航控制算法是自动飞行控制系统的核心技术,它能够使无人机实现稳定的飞行姿态和精确的定位。
经典的导航控制算法包括PID控制算法和模型预测控制算法等。
3. 环境感知与避障技术:为了确保无人机的安全飞行,自动飞行控制系统需要具备环境感知和避障能力。
通过使用传感器和计算机视觉技术,系统可以获取飞行环境的信息并避免碰撞。
4. 通信与数据链路技术:自动飞行控制系统需要与地面控制站或其他无人机进行实时通信,以实现飞行控制指令的传递和接收飞行器状态信息。
无人直升机的设计方案无人机的设计与组装
无人直升机的设计方案无人机的设计与组装一、结构设计:1.确定无人直升机的尺寸和重量要求,以及所需的载荷能力。
2.设计无人直升机的主要部件,包括机身、旋翼、电池舱、舵机等。
3.使用轻量化材料,如碳纤维复合材料,以降低重量并提高强度。
4.进行结构强度分析,确保无人直升机在飞行过程中具有足够的稳定性和耐久性。
二、电子系统设计:1.确定无人直升机所需的电子设备,包括控制器、遥控器、传感器等。
2.设计适合无人直升机的电路,并进行电路仿真和优化,确保电路的可靠性和高效性。
3.选择合适的电源系统,如锂电池,并设计电池管理系统,确保电池的安全使用和充电。
4.设计电子系统的布局,确保各个电子设备之间的相互连接和工作的稳定。
三、控制系统设计:1. 选择合适的飞控系统,如常见的Pixhawk飞控系统。
2.设计无人直升机的姿态控制算法,并进行模拟和优化,确保在不同的飞行姿态下,无人直升机能够保持稳定。
3.设计遥控器和无人直升机之间的通信协议,确保遥控器能够准确地控制无人直升机的飞行。
四、组装步骤:1.根据结构设计,将无人直升机的各个部件组装在一起。
确保零部件之间的连接紧固,以防止在飞行过程中出现松动。
2.将电子设备和传感器等安装在无人直升机上,确保各个设备之间的连接正确无误。
3.进行电子系统的调试和校准,确保无人直升机各个电子设备的工作正常,传感器的数据准确。
4.进行姿态控制系统的调试,确保无人直升机在飞行过程中能够保持稳定。
5.进行无人直升机的地面测试,确保无人直升机在飞行前具有良好的性能和安全性。
总结:。
基于Java的无人机控制系统设计与开发
基于Java的无人机控制系统设计与开发一、引言随着科技的不断发展,无人机作为一种重要的航空器具,被广泛应用于军事侦察、航拍摄影、农业植保等领域。
而无人机的控制系统设计与开发是保证无人机正常飞行和执行任务的关键。
本文将围绕基于Java的无人机控制系统设计与开发展开讨论。
二、无人机控制系统概述无人机控制系统通常由飞行控制系统(Flight Control System,FCS)、导航系统、通信系统等组成。
其中,飞行控制系统是无人机最核心的部分,负责控制飞行器的姿态、高度、速度等参数,保证其稳定飞行。
三、基于Java的控制系统设计1. Java在无人机领域的应用Java作为一种跨平台、面向对象的编程语言,在无人机领域也有着广泛的应用。
其优秀的跨平台性能和丰富的第三方库使得Java成为无人机控制系统设计的理想选择。
2. 控制系统架构设计在基于Java的无人机控制系统设计中,通常采用分层架构。
包括硬件驱动层、数据处理层、控制逻辑层和用户界面层等。
每一层都有着特定的功能和责任,相互配合完成无人机的控制任务。
3. 控制算法设计控制算法是无人机控制系统设计中至关重要的部分。
常见的控制算法包括PID控制、模糊控制、神经网络控制等。
在基于Java的设计中,可以借助Java强大的数学计算库实现各种复杂的控制算法。
四、基于Java的控制系统开发1. 开发环境搭建在进行基于Java的无人机控制系统开发前,需要搭建相应的开发环境。
包括安装JDK、配置开发工具(如Eclipse、IntelliJ IDEA)、引入相关库等。
2. 硬件连接与通讯在实际开发中,需要将Java程序与无人机硬件进行连接,并建立稳定可靠的通讯。
可以通过串口通讯、Wi-Fi连接等方式实现数据传输。
3. 控制逻辑实现根据设计时确定的控制逻辑,利用Java语言编写相应的代码实现。
通过调用传感器数据、执行相应算法来实现对无人机飞行状态的监测和调节。
4. 用户界面设计为了方便用户对无人机进行监控和操作,需要设计友好直观的用户界面。
面向对象的模块化无人机概念设计
方位发展, 可以加上定位系统装备上吊抓帮助人们寄取 决递等。
1 模块 化 飞 行 器设 计 理 念
面向对象的模块化无人机必须具备以下特性 : ①体积较小 ;
②可靠性较高 , 易于维护 ; ③具 备优 异的模块特性 , 能方便拆卸 和组装 ; ④满足用户 的多功能需求 ; ⑤更具安全性 , 经济性。 模块
T r a n s f o r m e r转 变 为 A e r i a l R e c o n i f g u r a b l e E m b e d d e d S y s t e m
控、 动力 、 电调 、 图传等无人机关键部件 , 行业用户可以根据需求
进行定制。同样 , P a r r o t 发布了两款最新无人机 ,分别为 P a r r o t S w i n g 及P a r r o t M a m b o 。该类模块式的无人机只能在单 一行业
化无人机具备这 5大特性才能满 足用户对于无人机 日 益增长的 物质文化需求 。为了应对 以上要求模块化飞行器应采用 以下技 术方案满足 以上特性 : ①较为通用 的气动布局 , 例如旋 翼布局 ; ②使用太阳能和锂电池的组合能源方式代替传统 的单一能源方 式; ③在飞机材料领域要探索新材料 ; ④使用模块化的结构 , 将 飞行器分为气动模块 、 动力模块 、 功能模块 、 控制模块 和辅助模
胁等。D A R P A甚至给出了相应的设计指标 , 如具备垂直起降功
能, 机 舱尺寸和普通悍马军车相似 , 能提供 4 5 0 k g 左右 的有效
载荷 ( 约为 4名士兵及其装备 的重量 ) , 不带 副油箱的航程约为 4 6 0 k m。大部分作 品是结 合共轴旋翼直 升机和汽车 的设计 思
无人直升机任务规划与控制系统课件

• 无人直升机概述 • 无人直升机任务规划 • 无人直升机控制系统 • 无人直升机任务规划与控制系统的挑战与
解决方案 • 案例分析
01
无人直升机概述
无人直升机的定义与分类
无人直升机定义
无人直升机是一种能够自动或远 程操控的飞行器,具有自主飞行、 导航、避障等功能,可用于军事、 民用等多种领域。
仿真能力强:MATLAB具有强大的仿真能力,可以对无 人直升机的各种任务进行模拟和验证。
可视化界面友好:MATLAB提供了丰富的可视化工具, 可以将任务规划和控制系统的界面变得更加直观和友好。
基于Arduino的无人直升机控制系统案例
总结词:低成本、易实现、适用于小型无人机
低成本:Arduino板卡的价格较为低廉,降低了无人直升 机控制系统的成本。
支持多种编程语言:ROS支持C、Python等多种编程 语言,方便开发人员根据需求选择合适的编程语言。
高度可扩展性:ROS具有丰富的功能模块和工具包,可 以根据需求进行定制和扩展。
开源性:ROS是开源的,可以免费获取和使用源代码, 方便开发人员进行二次开发和优化。
基于PIXHAWK的无人直升机控制系统案例
无人直升机控制系统的特点与优势
无人直升机控制系统的特点
无人直升机控制系统具有高精度、快速响应、稳定性好等特点。其中,高精度能够实现对无人直升机 的精确控制,快速响应能够及时处理突发情况,稳定性好能够保证无人直升机的飞行安全。
无人直升机控制系统的优势
无人直升机控制系统具有高效、灵活、经济等优势。其中,高效能够提高任务完成效率,灵活能够适 应各种复杂环境,经济能够降低成本。
无人直升机的动力学模 型具有非线性特点,给 控制系统设计带来挑战。
面向直升机飞控系统的优化设计与实现
面向直升机飞控系统的优化设计与实现近年来,随着技术的不断发展,直升机已经成为了航空领域中不可或缺的一部分。
作为一种复杂的飞行工具,直升机的飞控系统对于其安全和性能至关重要。
因此,优化设计和实现直升机飞控系统已经成为了当前研究的热点之一。
本文旨在探讨面向直升机飞控系统的优化设计与实现方法。
一、直升机飞控系统概述直升机飞控系统是由多个子系统组成的复杂系统,包括机械、液压、能源、控制等多个方面。
其中,控制子系统是直升机飞控系统的核心部分,主要包括飞行控制、姿态控制、纵向控制、横向控制等内容。
飞行控制是指直升机在飞行过程中保持良好的稳定性和控制性;姿态控制是指直升机在加速、升降、旋转等方面的姿态控制;纵向控制是指直升机在垂直方向上的控制;横向控制是指直升机在水平方向上的控制。
二、直升机飞控系统的优化设计在直升机飞行过程中,控制系统的性能和可靠性对于直升机的飞行安全和性能具有重要的影响。
因此,如何实现直升机飞控系统的优化设计是目前研究的重要内容。
(一)控制系统设计直升机的控制系统一般采用传统的PID控制器设计,在此基础上引入某些先进的控制方法,例如模糊控制、神经网络控制等。
其中,模糊控制是一种能够适应复杂环境和输入变化的控制方法,相比传统PID控制更加优秀;神经网络控制则是一种基于人工神经网络设计的控制方法,能够适应各种复杂环境。
这些控制方法都可以用于直升机飞控系统的优化设计,以提高其控制性能和可靠性。
(二)传感器选择与布局传感器的选择与布局是直升机飞控系统设计中重要的一环。
在选择传感器的时候,需要根据不同的应用场景和控制系统的需要进行选择。
例如,加速度计和陀螺仪用于测量直升机的姿态和转向角度;高度计和气压计用于测量直升机的高度;GPS用于测量直升机的位置等。
在布局传感器的时候,需要考虑到其相互之间的干扰影响,以及其灵敏性和精度等方面的问题。
(三)控制算法优化控制算法优化是一种通过模型修正、参数优化、算法改进等方式来提升控制性能的方法。
无人直升机数据采集与处理系统的设计与实现

无人直升机数据采集与处理系统的设计与实现摘要:当前,无人直升机作为直升机领域中发展的一个组成,其体积较小,不需要驾驶人员,可以通过无人直升机完成多项工作。
随着科学技术不断发展,自动化控制技术不断改进,以自动化控制技术为基础,无人机技术得到快速发展,无人机的应用范围不断扩大。
此外,因为无人机的自身特点,无人机的使用价值不断提高。
数据采集系统对无人机的正常使用有着重要作用,通过采集无人直升机的相关信息,并及时反馈,数据采集系统发挥着监测作用。
因此,对数据采集系统加强研究和探索是有重要意义的。
本文主要针对当前数据采集系统的设计展开分析,以期为我国无人直升机的发展提供参考。
关键词:无人直升机;数据采集系统;电气系统引言:数据采集系统能够接收指令,从而完成信号的采集和运输。
当前计算机技术的发展,与数据采集系统能够较好结合,在航空领域发挥重要作用。
通过计算机技术,能够提高无人直升机的灵活性,能够广泛应用。
此外,无人直升机在发展过程中,需要处理多种信号,无人直升机中包括多个通信模块,要满足地面与无人直升机之间的数据传输,为了确保地面能够向无人直升机及时输送指令,从而控制无人直升机的飞行。
需要不断提高数据采集的精确度,也需要具备实时性。
所以,当前所采用的多种处理器,能够提高数据采集的精确度,实时性较高。
1国内外研究现状当前,数据采集系统主要是输入设备所监测到的各种电气信号,结合其他技术,对电气信号进行识别并记录,从而形成完整的数据采集系统。
数据采集系统需要对数据进行及时采集,及时记录,并具备对数据分析的能力。
此外,数据采集系统也需要对设备的状态进行监测,能够实时分析设备的相关状态。
当前数据采集系统被广泛应用在各种机器设备上,对相关设备进行定期监测,能够及时发现故障。
数据采集系统和现代计算机结合,就成为现代的监测系统,计算机能够为数据采集系统诊断故障提供帮助,提高数据采集系统的准确性。
当前,数据采集系统的发展方向趋向于智能化,不断提高智能化的发展,在一些其他国家,数据采集系统的发展已经逐步成熟,数据采集系统的功能基本一样,在机器设备上发挥相同作用,不同型号的数据采集系统之间差距不大。
用C语言实现的智能无人机航行控制系统设计
用C语言实现的智能无人机航行控制系统设计一、引言随着科技的不断发展,无人机作为一种新型的航空器具备了广泛的应用前景,包括军事侦察、灾害勘测、农业植保等领域。
而无人机的航行控制系统是保证其安全飞行的核心。
本文将介绍如何利用C语言设计智能无人机航行控制系统,实现对无人机的精准控制。
二、智能无人机航行控制系统设计1. 系统架构智能无人机航行控制系统主要由传感器模块、数据处理模块、执行器模块三部分组成。
传感器模块用于获取环境信息,数据处理模块对传感器获取的数据进行处理分析,执行器模块则根据处理结果控制无人机的航行。
2. 传感器模块传感器模块是智能无人机航行控制系统中至关重要的部分,常用的传感器包括陀螺仪、加速度计、气压计等。
这些传感器可以实时获取无人机的姿态、速度、高度等信息,为后续的数据处理提供基础。
3. 数据处理模块数据处理模块负责对传感器获取的数据进行滤波、融合等处理,提取出有用的信息并进行分析。
在C语言中,可以利用各种算法如卡尔曼滤波、PID控制等来实现数据处理模块的功能。
4. 执行器模块执行器模块根据数据处理模块得出的结果,控制无人机的电机、舵机等执行器,实现对无人机航行状态的调节。
通过C语言编程,可以编写相应的控制算法,实现对无人机的精准控制。
三、C语言在智能无人机航行控制系统中的应用1. 高效性能C语言作为一种高效的编程语言,在嵌入式系统中有着广泛的应用。
其快速的运行速度和对硬件的直接操作使得C语言成为设计智能无人机航行控制系统的理想选择。
2. 灵活性C语言具有较高的灵活性,程序员可以根据具体需求编写各种算法和函数,实现对无人机航行状态的精准控制。
同时,C语言也支持指针操作等底层操作,方便与硬件进行交互。
3. 可移植性由于C语言是一种通用性较强的编程语言,编写好的代码可以在不同平台上进行移植和调试。
这意味着设计好的智能无人机航行控制系统可以适用于不同型号和品牌的无人机上。
四、总结通过本文对用C语言实现的智能无人机航行控制系统设计进行介绍,我们了解到了智能无人机航行控制系统的架构和各个模块的功能。
无人直升机控制系统探索

无人直升机控制系统探索无人直升机(UAV)的出现已经成为了现代技术的一个标志。
它们可以应用于许多领域,包括军事侦察、天气预报、地理勘测、搜救等。
无人直升机的出现给我们的生活带来了很多便利,但是它们的安全控制系统一直是制约其应用的关键因素之一。
本文将探讨无人直升机控制系统的开发和应用,以及目前的技术发展方向。
无人直升机的控制系统是由多个部分组成的,其中包括飞行控制、通信链路、遥控设备、导航和自主控制等。
这些部分共同作用,保证了无人直升机的飞行安全和稳定性。
飞行控制系统是无人直升机的大脑,它负责处理传感器数据,执行飞行任务,并保证飞机的稳定性。
通信链路用于传输飞行控制系统和地面操作员之间的指令和数据。
遥控设备是地面操作员控制飞机的关键设备,它包括操纵杆、摇杆等。
导航系统用于确定飞机的位置,速度和姿态,而自主控制系统则可以让飞机自动执行飞行任务。
无人直升机的控制系统具有很高的要求,因为飞行中会遇到各种各样的不确定因素,比如天气、地形、通信干扰等。
为了解决这些问题,目前的研究方向主要包括以下几个方面。
飞行控制系统的研究是无人直升机控制系统的核心。
目前,自主控制系统的研究已经取得了很大的进展。
传统的PID控制器逐渐被基于强化学习和神经网络的控制方法所替代。
这种方法可以让无人直升机更好地适应各种复杂的环境,并且具有更强的自主性和抗干扰能力。
研究者还在积极探索新的控制策略,比如模糊控制、遗传算法等,以提高飞机的飞行性能和稳定性。
通信链路和遥控设备的研究也是无人直升机控制系统研究的重要部分。
目前,无人直升机的遥控设备已经由传统的手动操纵变成了数字化的遥控系统。
这些系统在提高操纵精度的还可以实现更多的飞行功能,比如自动起降、路径规划等。
通信链路的研究也在不断向着高速、稳定和抗干扰方向发展,以保证飞机与地面操作员之间的及时通信。
导航系统的研究也是无人直升机控制系统研究的重要组成部分。
目前,卫星导航系统已经成为了无人直升机导航的主要手段。
无人直升机地面站信息管理系统软件的设计与实现

摘要无人直升机现已在多个领域内得到了广泛的应用,作为其配套的控制管理设备,地面站相关技术的研究也成为国内外无人机领域研究的一个要点,地面站的主要工作是管理无人直升机的飞行及任务相关信息。
针对目前无人直升机及地面站种类繁多的情况,开发一种开放式结构的无人直升机通用型地面站的需求日益迫切。
所以,设计制作一款分布式和模块化的无人直升机地面站信息管理系统软件具有一定的实际意义。
本文参考国内外现有的地面站及其相关技术的研究的资料,综合使用需求和技术条件,设计了系统的相应结构。
依托HLA 标准的RTI 平台提供的服务,搭建一个分布式的开放系统架构,在这个架构之上,使用电子地图、虚拟仪表、视景合成等技术实现地理信息管理、实时姿态跟踪显示、航迹规划等功能。
首先,研究高层体系结构的相关的理论,包括其规则、接口规范、声明管理、对象管理等,以及联邦运行支撑框架的结构和使用。
并在详细阐述了联邦开发和执行过程模型之后,对整个无人直升机地面站信息管理系统做了分析。
划分了各个联邦成员,并对每个成员的功能实现和结构组成做了详细的设计。
之后,根据设计所得的资料,进行了系统联邦的开发工作,包括系统联邦对象模型的开发、联邦成员本地RTI 接口的开发。
并结合本系统的使用需要,提出并采用了一种低代价的联邦成员迁移机制,增强了系统的动态特性;还应用了RTI 外的联邦成员之间大量数据传输的方法,降低了RTI 平台的通信负荷。
其后,使用对应技术,开发和完善系统的相应功能模块。
最后,进行了系统联邦协同运作和联邦成员模块的功能实现的测试,结果证明邦员之间可以完成交互动作,设计功能也能基本实现。
基于HLA 的软件体系结构能达到系统设计模块化的要求。
关键词:无人直升机地面站,信息管理,高层体系结构,联邦成员,分布式系统IABSTRACTABSTRACTUnmanned Helicopter has been widely used in many fields. As the supporting equipment of UH, the research of Ground Control System has become an important point. The main function of the GCS is the management of UH and its mission information. There are various type of UH and GCS. It is important to develop a kind of universal GCS with open structure. Therefore, the design of modular and distributed UH GCS information management system software has some practical significance.In this thesis, considering the usage requirements and technical conditions, a structure of system is designed based on the research of domestic and international GCS and related technologies. It is a distributed system structure based on the service provided by RTI in HLA standard. With this architecture, it uses electronic maps technology, virtual instruments and virtual reality technology to achieve the function of geographic information management, tracking planning and real-time exhibit of UH attitude.At first, theories about high level architecture have been studied, including its rules, interface standard, statement management, object management, etc. The structure and the operation of the RTI have been also researched. An analysis of UH GCS information management systems is made after the understanding of FEDEP. The various federal members is divided, functions and structures of each member are detailed designed. After that, the system federation is developed according to the above information, including the FOM and LRC. A low expense of migration mechanism of federal members is proposed and adopted, which can enhance the dynamic characteristics of the system. The method of large data transmission between different federal members outside RTI is also applied, which reduce the communication load of RTI platform.After that,the function modules of the system were developed and improved by using corresponding technique.At the end of this thesis, test the function of each federal members and the collaborative operation of federation system. The results showed that members can complete interaction between each other, and the basic design function are satisfied. The software architecture based on HLA can achieve the requirements of m odular.IIABSTRACTKeywords:UH GCS, information management, HLA, federal members, distributed systemIII目录目录第一章绪论 (1)1.1 国内外研究背景及现状.............................................................................1.1.1 无人机及地面站的发展 (1)1.1.2 HLA 技术的发展 (5)1.2 研究内容及意义...................................................................................1.3 论文章节结构.....................................................................................第二章相关技术基础 . (8)2.1 HLA 分布式技术 ..................................................................................2.2 软件开发相关技术..................................................................................2.2.1 地理信息系统开发技术 (10)2.2.2 虚拟现实技术 (11)2.2.3 虚拟仪表技术 (12)2.2.4 数据库技术 (13)2.3 本章小结..........................................................................................第三章地面站信息管理软件系统总体设计 .. (15)3.1 设计方案说明......................................................................................3.2 系统需求分析......................................................................................3.2.1 功能需求分析 (16)3.2.2 设计及性能要求 (17)3.3 整体设计..........................................................................................3.4 系统模块设计......................................................................................3.4.1 控制管理模块设计 (20)3.4.2 通信链路管理模块设计 (22)3.4.3 信息数据管理模块设计 (22)3.4.4 负载管理模块设计 (26)3.5 本章小结..........................................................................................第四章基于HLA 的系统联邦的设计和开发 .. (27)4.1 系统联邦成员设计..................................................................................4.1.1 联邦成员划分 (27)IV目录4.1.2 联邦成员功能规划 (28)4.2 地面站信息管理系统的联邦开发 (30)4.2.1 联邦FOM 的开发 (31)4.2.2 LRC 功能模块开发 (34)4.3 联邦功能实现 (38)4.3.1 联邦成员的组合 (38)4.3.2 联邦成员迁移的实现 (39)4.3.3 桥接数据通信机制 (41)4.4 本章小结 (42)第五章无人直升机地面站信息管理系统软件功能模块的实现 (43)5.1 通信链路管理模块实现 (43)5.2 系统调度功能模块实现 (46)5.3 地理信息管理功能模块实现 (47)5.4 航迹管理功能模块实现 (50)5.5 状态数据显示功能模块实现 (52)5.6 实时姿态显示功能模块实现 (56)5.7 数据库管理功能模块实现 (57)5.8 负载管理功能模块实现 (58)5.9 本章小结 (59)第六章系统测试 (60)6.1 系统工作测试 (60)6.1.1 系统测试环境 (60)6.1.2 系统联邦运行测试 (60)6.2 本章小结 (66)第七章总结与展望 (67)7.1 主要工作总结 (67)7.2 未来工作展望 (67)致谢 (69)参考文献 (70)V第一章绪论第一章绪论无人机是一类包括不同动力和飞行方式、、由无线电遥控设备或机载智能控制设备操纵、机上无任何驾驶人员、可重复使用的飞行器的总称,英文里为Unmanned Aerial Vehicle 表示,其简写为UAV[1]。
基于面向对象技术的先进飞机自动配电监控系统设计

基于面向对象技术的先进飞机自动配电监控系统设计谢拴勤;脱秀林;刘成;李玲【摘要】针对先进飞机自动配电的监控系统,运用面向对象建模语言对系统进行建模与面向对象技术进行软件设计,以飞机自动配电系统内各种配电设备为对象进行全面分析、归类和建模,建立了具有稳定友好可视化人机交互界面的先进飞机自动配电监控系统;该软件设计依托Visual C++6.0强大功能,利用API甬数封装的串口通信类实现Windows环境下串行通信,选用Access2003作为数据存储工具,通过编程接口对其进行访问,实现实时有效的管理系统中的数据;实验结果表明此系统具有友好的人机交互界面,运行稳定、可靠并且具有可扩展性.【期刊名称】《计算机测量与控制》【年(卷),期】2010(018)005【总页数】4页(P1088-1091)【关键词】面向对象建模;Visual C++;类;串口通信;数据库【作者】谢拴勤;脱秀林;刘成;李玲【作者单位】西北工业大学,自动化学院,陕西,西安,710129;西北工业大学,自动化学院,陕西,西安,710129;西北工业大学,自动化学院,陕西,西安,710129;西北工业大学,自动化学院,陕西,西安,710129【正文语种】中文【中图分类】TP3020 引言在飞机电气系统中,随着电力电子和计算机技术的高速发展,固态器件取代了传统的机电式、触点式继电器和接触器,这种固态器件可以用计算机进行控制。
固态配电方式的配电系统可采用分布式汇流条配电方案,飞机座舱中无须设置中心配电装置,用电设备就近与配电汇流条相连。
这种配电方式,采用多路传输技术,由计算机来完成所要求的控制和监控功能,全部或部分替代飞行人员的操作,进行负载自动控制和管理,提高了配电系统的效率和可靠性,减轻了飞行人员的负担。
由于用键盘控制器和显示器取代了众多的指示/控制装置,缓和了驾驶舱控制板上设备的拥挤程度。
飞机配电系统的自动化程度越来越高,自动化程度已成为衡量先进飞机电气系统水平高低的重要标志,高质量、方便实用且易于操作的监控系统是飞机电气系统管理的必要内容,而图形化人机界面又是先进飞机自动配电监控系统中不可缺少的部分。
用面向对象方法设计无人直升机信息处理系统

用面向对象方法设计无人直升机信息处理系统
赵琦;张晓林
【期刊名称】《北京航空航天大学学报》
【年(卷),期】2002(028)004
【摘要】面向对象的设计方法在系统设计中得到了越来越广泛的应用.地面信息处理系统是无人机的重要组成部分,在无人机执行任务过程中,地面信息处理系统提供的无人机的飞行参数和设备参数是飞行员实施监控的依据.分析了共轴式无人驾驶直升机地面信息处理系统的特点和需求,应用面向对象的设计方法,设计了无人机测控地面站信息处理系统,该系统具有易重复使用、易改进、易测试、易维护和易扩充等特点.经过多次试飞证明,该系统满足飞行要求.
【总页数】4页(P409-412)
【作者】赵琦;张晓林
【作者单位】北京航空航天大学电子工程系;北京航空航天大学电子工程系
【正文语种】中文
【中图分类】V243.5
【相关文献】
1.海南省供销社与海南省农资公司首次引进智能无人直升机:无人直升机洒农药种粮大户欲“尝鲜” [J], 汪洋;张玉付
2.军用无人驾驶直升机发展动向简述——几种世界著名的军用无人驾驶直升机型号简介 [J], 操辰东
3.用面向对象设计方法开发车号员信息处理系统 [J], 黄洪亮
4.直升机防撞激光雷达综合信息处理系统 [J], 张清源;李丽;李全熙;董光焰
5.面向对象的“平法”施工图钢筋信息处理系统研究 [J], 孙波成;赵慧娟
因版权原因,仅展示原文概要,查看原文内容请购买。
无人直升机飞行控制系统设计报告
无人直升机飞行控制系统设计报告摘要:本文介绍了用于无人直升机控制的飞行控制系统结构和分部分的主要性能,详细阐述了系统设计方案以及设计思想。
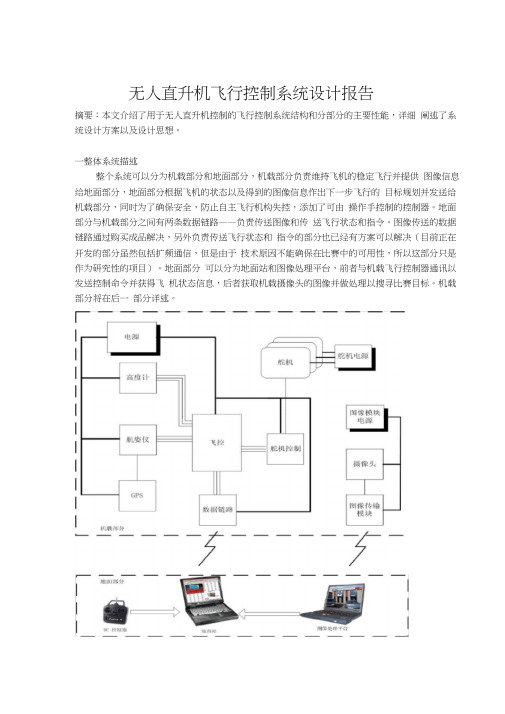
一整体系统描述整个系统可以分为机载部分和地面部分,机载部分负责维持飞机的稳定飞行并提供图像信息给地面部分,地面部分根据飞机的状态以及得到的图像信息作出下一步飞行的目标规划并发送给机载部分,同时为了确保安全,防止自主飞行机构失控,添加了可由操作手控制的控制器。
地面部分与机载部分之间有两条数据链路——负责传送图像和传送飞行状态和指令。
图像传送的数据链路通过购买成品解决,另外负责传送飞行状态和指令的部分也已经有方案可以解决(目前正在开发的部分虽然包括扩频通信,但是由于技术原因不能确保在比赛中的可用性,所以这部分只是作为研究性的项目)。
地面部分可以分为地面站和图像处理平台,前者与机载飞行控制器通讯以发送控制命令并获得飞机状态信息,后者获取机载摄像头的图像并做处理以搜寻比赛目标。
机载部分将在后一部分详述。
飞机内部系统描述为了完成自主飞行任务,飞机需要相关功能部件完成对飞机状态信息的采集、对执行部分的控制以及对地面站命令的响应等功能。
在无人机上,替代飞行员或操作手完成 飞行任务的自主机构包括图像设备、飞控模块、高度测量、舵机控制、数据链路以及航 姿仪等,如下图所示:各个模块之间相对独立,均可单独完成一定的功能,模块之间的相互连接采用总线 实现,硬件上采用PC104标准,便于安装和系统集成。
虽然采用的总线是较可靠的通讯 标准,但是在直升机实际飞行的环境中存在震动、电磁等干扰因素,可能影响到数据传 输的可靠性,为了保证正确的数据传输,采用了两套互为备份的总线系统一一422总线和 CAN 总线。
422总线为现有UAV 系统采用的标准,具有技术较成熟的优势;CAN 总线 对于数据包的传送更为方便,克服了 422只能采用主从模式以及工作在轮询模式的缺点, 并且具有更高的数据传输速度,是一种较新的标准,使用CAN 总线也是对系统方案升级 的尝试。
无人直升机自主飞行控制系统设计与工程实现
无人直升机自主飞行控制系统设计与工程实现摘要:无人直升机因造价低、效益好、无人员伤亡、使用灵活等特点,广泛应用于军事、民用以及科研领域。
但无人直升机有着操纵响应迟缓、稳定性差、通道耦合严重等缺点,尤其是在悬停小速度段不稳定性更为明显,再加上飞行模态众多,因此对无人直升机飞行控制系统有着很高的要求。
无人直升机自主飞行控制技术涉及多学科交叉技术,具有极大的研究价值。
另外,无人机自主飞行控制技术是编队飞行控制技术的基础,只有实现良好的自主飞行性能,才能实现多机编队飞行。
因此无人直升机自主飞行控制技术研究是具有十分重要的意义。
关键词:无人直升机;自主飞行控制;系统设计;工程实现1无人直升机自主飞行控制系统概述飞行控制系统包含飞行控制器硬件、软件及算法设计;飞行地面站包含硬件平台和软件设计两部分;数据链路通信系统由物理线路、软件通信协议和通信拓扑结构构成。
无人直升机飞行控制系统是自主飞行控制系统的载体,是自主飞行控制系统的执行层。
飞行地面站系统是自主飞行控制系统的控制指令生成及发送终端,是自主飞行控制系统的决策层。
数据链路通信系统是飞行控制系统和地面站系统的信息交互桥梁,是自主飞行控制系统的数据交互层。
地面站系统通过无线数据链路向无人直升机飞行控制系统发送航点等飞行指令,无人直升机飞行控制系统收到指令后,运行控制算法按照指定路线飞行,同时与地面站保持实时通信,地面站软件实时显示无人直升机飞行轨迹并可以随时改变其飞行轨迹,由此形成了本文无人直升机自主飞行控制系统基本逻辑。
2无人直升机飞行控制器设计2.1飞行控制器总体设计无人直升机飞行控制器总体设计包含硬件和软件两大部分。
控制器硬件部分由内置主控电路、传感器电路、输入输出电路设计、外置硬件选型及无线数传设备等部分组成。
软件设计由飞行控制、传感器数据融合、无线数据通信与解析、任务管理、舵机驱动等模块构成。
底层硬件为上层软件提供数据来源及硬件基础,上层硬件为底层硬件提供数据驱动,底层硬件和上层软件有机地结合,构成了一个完整的无人直升机自主飞行控制器系统。
直升机装备管理信息系统的设计与实现的开题报告
直升机装备管理信息系统的设计与实现的开题报告一、选题背景随着科技的发展和经济的进步,直升机在军事、医疗、警务、消防等领域中得到越来越广泛的应用。
直升机作为一种高性能、高精度的空中作业平台,装备中包含了大量的仪器、设备和零部件。
对于直升机的装备管理至关重要,直接影响到它们的运行效率、安全性和耐久性。
为此,开发一套直升机装备管理信息系统,可以实时监测、控制和管理直升机的装备信息,最大限度地提高其工作效率和安全性,具有重要的现实意义。
二、研究内容本项目拟设计和实现一款直升机装备管理信息系统,主要研究内容包括:(1)系统需求分析:根据用户需求,确定系统的功能、性能和接口要求,建立系统的总体架构和用户流程。
(2)系统设计:采用系统化的方法,设计系统的结构、模块、算法和数据库,编写系统的开发计划和详细设计文档。
(3)系统实现:按照设计要求,选用适当的编程语言和开发工具,开发系统的前后端业务逻辑、用户界面和数据处理模块。
(4)系统测试:在开发完成后,进行单元测试、集成测试、系统测试和用户测试,确保系统的正确性、可用性和可维护性。
三、研究方法本项目采用以下研究方法:(1)文献综述:通过查阅相关文献,了解直升机装备管理信息系统的研究历史、现状和发展趋势,为系统设计和实现提供理论支持。
(2)需求分析:通过用户调研、问卷调查和专家访谈等方式,获取用户对系统的需求,明确系统的功能、性能和技术要求。
(3)系统设计:采用UML和ER图等系统化方法,建立系统的概念模型和逻辑模型,确定系统的结构、模块和算法。
(4)系统实现:选用较为流行的开发工具和框架,采用面向对象的编程思想,开发系统的业务逻辑、用户界面和数据处理模块。
(5)系统测试:采用黑盒测试和白盒测试相结合的方式,对系统进行单元测试、集成测试、系统测试和用户测试,确保系统的正确性、可用性和可维护性。
四、预期成果本项目的预期成果包括:(1)一份规范的开题论文和中期答辩论文,包含系统需求分析、系统设计和系统实现等内容。
小型自主无人直升飞机软件系统设计与实现的开题报告

小型自主无人直升飞机软件系统设计与实现的开题报告开题报告一、课题背景随着科技的发展,自主无人直升飞机的应用日益广泛,涵盖了农业、医疗、物流、勘探等领域。
传统的飞行器需要人为操纵,需要高昂的成本以及严格的员工资质要求。
而自主无人直升飞机可以实现自主化的操作,不仅可以降低运营成本,而且在一些危险场合,比如救援、探矿等,可以更好地保障人员安全。
因此,自主无人直升飞机已经成为了今后发展的必然趋势。
而小型自主无人直升飞机可以更好地适应各种工作场景,因此受到了越来越多人的关注。
基于这样的背景和前景,本课题拟对小型自主无人直升飞机软件系统进行设计和实现,实现飞行器的自主控制、数据分析、地理定位等功能,从而保障无人直升飞机的安全稳定、高效运营。
二、研究内容1. 研究并确定小型无人直升飞机硬件平台及相应技术:选择一款小型无人直升飞机,了解其硬件平台构造,评估其飞行性能、传感器、控制系统等技术指标,为研究软件系统提供参考。
2. 设计并实现小型无人直升飞机软件系统:设计实现软件控制系统,建立机器人路径规划、自主化决策、数据收集与分析等功能模块,实现自主飞行、地理定位和数据记录等基本功能。
3. 验证软件系统的稳定性与有效性:通过对软件系统的模拟测试和实际场景测试,验证软件系统的性能、稳定性等方面指标,并提出优化改进方案。
三、研究方法1. 数据分析方法:通过对现有的无人机软件系统的分析,了解市面上存在的问题、不足之处,为自主软件系统设计提供基础。
2. 需求分析方法:从应用场景出发,将无人机软件系统用户需求进行分析和解读,分析无人机软件系统的具体功能,以及现有技术解决的优势和问题。
3. 软件设计方法:选定软件开发框架,构建机器人路径规划、自主化决策、数据收集与分析等模块,实现系统的基本功能。
4. 模拟测试方法:通过模拟仿真实现软件系统功能,测试机器人路径规划、自主化决策、数据收集与分析等模块接口的有效性。
5. 实测测试方法:将软件系统运用到实际场景测试中,根据实际测试结果,修正并提出软件系统的改进方案。
python无人机程序设计

python无人机程序设计无人机(Unmanned Aerial Vehicle,简称UAV)近年来得到了广泛应用和发展,在军事、航拍、物流等领域发挥着重要作用。
而无人机的控制程序的开发也是无人机技术的重要组成部分。
Python作为一种功能强大且易于使用的编程语言,被广泛应用于无人机程序设计。
本文将介绍Python在无人机程序设计中的应用和相关内容。
我们要了解无人机程序设计的基本原理。
无人机程序设计主要涉及到两个方面,即无人机飞行控制和任务控制。
无人机飞行控制是指对无人机的飞行状态进行控制和调整,如起飞、降落、悬停、定点飞行等。
任务控制是指无人机执行特定任务,如航拍、物品投放、搜救等。
Python在这两个方面都有广泛的应用。
对于无人机飞行控制,Python提供了许多相关的库和模块,如Dronekit、Pygame和Tkinter等。
其中,Dronekit是一个用于与无人机通信的Python库,可以实现对无人机的遥控和状态获取等功能。
Pygame是一个用于游戏开发的库,可以用来创建无人机的飞行控制界面。
Tkinter是Python自带的一个图形化界面库,可以用来设计和开发无人机的地面站软件。
使用这些库和模块,开发者可以通过Python编写出控制无人机飞行的程序,并且实现灵活多样的飞行模式和控制方式。
对于无人机的任务控制,Python同样提供了许多实用的库和模块。
例如,OpenCV是一个开源的计算机视觉库,可以用于无人机的图像识别和目标跟踪。
TensorFlow是一个用于机器学习和深度学习的库,可以用于无人机的自主飞行和智能决策。
还有许多其他的库和模块,如NumPy、Matplotlib和Pandas等,都可以在无人机任务控制中发挥重要的作用。
这些库和模块使得无人机能够对外界环境进行感知和分析,并且能够实现更加复杂和智能化的任务。
除了以上提到的库和模块,Python还可以通过调用其他编程语言的接口来扩展无人机程序的功能。
适合控制无 人机的编程语言

适合控制无人机的编程语言无人机作为无人驾驶飞行器的代表,近年来在各个领域都得到了广泛的应用。
无人机的控制需要依靠编程语言来实现。
本文将介绍适合控制无人机的编程语言,并分析其特点和优势。
1. PythonPython是一种高级编程语言,以其简洁、易读的语法而闻名。
对于控制无人机来说,Python具有以下优势:Python具有丰富的库和框架,如Django、Flask等,可以方便地进行开发和调试。
对于无人机控制,有一些开源的Python库,如DroneKit和PyDrone等,可以帮助开发者快速搭建控制系统。
Python的语法简洁易懂,使得开发者能够更加专注于算法的设计和实现,而无需过多关注底层细节。
这对于初学者来说尤为重要,因为他们可以更快地上手编程。
Python还具有良好的跨平台性,可以在不同的操作系统上运行,不受硬件平台的限制。
这对于控制无人机的应用来说非常重要,因为无人机的硬件平台可能各不相同。
2. C++C++是一种高效的编程语言,广泛应用于系统级开发和嵌入式系统。
对于控制无人机来说,C++具有以下优势:C++具有高性能和低延迟的特点,能够实时地处理大量的数据和复杂的算法。
在无人机控制中,往往需要处理实时传感器数据和复杂的飞行控制算法,因此需要一种高效的编程语言来实现。
C++支持面向对象的编程范式,能够更好地组织和管理代码。
这对于无人机控制系统来说尤为重要,因为无人机的控制涉及到多个模块和组件的协同工作。
C++还具有强大的硬件控制能力,可以直接操作底层硬件,与无人机的传感器和执行器进行交互。
这对于控制无人机来说非常关键,因为无人机的控制需要与多个硬件设备进行通信。
3. JavaJava是一种广泛应用于企业级开发的编程语言,以其可移植性和安全性而受到青睐。
对于控制无人机来说,Java具有以下优势:Java具有良好的跨平台性,可以在各种操作系统上运行,不受硬件平台的限制。
这使得开发者可以更加灵活地选择硬件平台,而无需重新编写代码。
面向对象的空中交通进程仿真技术及应用的开题报告

面向对象的空中交通进程仿真技术及应用的开题报告一、研究背景空中交通进程仿真技术是在真实交通环境中模拟飞行器、管制系统、空中交通等复杂元素的行为和交互,以实现空中交通管理的优化、效率的提高和安全的保障。
随着现代民用航空业的不断发展和技术的进步,仿真技术是实现安全、经济和高效的空中交通管理的重要手段之一。
二、研究内容本次论文将采用面向对象技术实现空中交通进程仿真系统,主要研究内容包括:1. 空中交通进程的建模:根据空中交通的特点和航空器的行为规律,构建合理、逼真的空中交通进程模型。
2. 管制系统的建模:通过对常见管制系统的研究,设计出适用于实际空中交通的管制系统模型。
3. 系统架构的设计:采用面向对象设计思想,设计合理的系统架构,并实现其相应的类和对象。
4. 空中交通进程的仿真实现:根据所设计的模型和系统架构,编写相应的程序,并进行测试和优化,使仿真结果更加符合实际情况。
5. 仿真结果的分析与应用:对仿真结果进行分析和综合,提取有用信息,为空中交通管理决策提供科学依据。
三、预期成果1. 实现一套完整的空中交通进程仿真系统,能够模拟真实的空中交通进程和管制系统,具有高度的逼真度和精度。
2. 对空中交通进程进行建模,明确其行为规律,并提供一些优化措施,为实际运行中的空中交通管理提供有益参考。
3. 提供一套全面的、可信的空中交通管理工具,以提高民航交通效率和安全性。
四、研究方法1. 系统分析和设计:通过对实际情况的分析和需求的明确,设计出合理的系统结构和算法流程。
2. 编程实现:采用面向对象技术,以C++为主要开发语言,结合OpenGL图形库进行图形化界面开发。
3. 系统测试和优化:对系统进行全面、系统的测试和性能优化,以确保系统功能和性能的稳定和可靠。
五、进度安排第一年1. 空中交通进程建模,确定相关变量和常数。
2. 设计管制系统模型,解析管制命令。
3. 系统分析和设计,制定详细的系统架构。
第二年1. 编写基本仿真模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 用 oo 方 法 设 计 信 息 处 理 系 统
1 1 地 面 信 息 处 理 系统 的 总 体 结 构 和 特 点 .
O O技 术 是 一 个 非 常 实 用 而 强 有 力 的 软 件 开
发方 法 . 的 主 要 特 征 是 以一 种 与 人 类 思 维 方 式 它
在 无 人 机 测 控 系 统 中 , 面 信 息 处 理 系 统 是 地
中 图 分 类 号 : 4 5 V 2 3.
文献标 识码 : A
文 章 编 号 :10 .9 5 2 0 )40 0 .4 0 15 6 ( 0 2 0 .4 90
在 对 无 人 机 的 控 制 过 程 中 , 行 员 要 根 据 地 飞 面 信 息 处 理 系 统 连 续 不 断 地 实 时 提 供 的 飞 机 位
置 、 态 等 各 种 飞 行 参 数 , 纵 无 人 机 按 任 务 飞 姿 操 行 . 此 , 求 在 系 统 的 设 计 上 , 须 能 够 提 供 直 因 要 必
观 与 完 备 的 可 视 化 界 面 . 外 , 于 共 轴 式 无 人 驾 另 由
驶直升机 的研制在我 国属首 次 , 其发展 过程 中 , 在 功 能 应 根 据 用 户 需 求 进 一 步 拓 宽 , 就 要 求 地 面 这
囡一
图 1 无 人 机 测 控 系 统 地 面 站 的 简 要 框 图
信息 处 理 系统 能 同时 满 足 新 的 功 能 要 求 , 向 对 面
象 ( O) 术 是 一 个 非 常 实 用 而 强 有 力 的 软 件 开 O 技 发方法 . 能很好 地实现这 种逐步完善 的过程 . 它 本
Au us 2 02 g t 0 Vo . No. I 28 4
第2 卷 第4 8 期
用 面 向 对 象 方 法 设 计 无 人 直 升 机 信 息 处 理 系 统
赵 琦
摘
张 晓 林
( 京航 空航 天大 学 电子 工程 系 ) 北
要 :面 向对 象 的 设 计 方 法 在 系 统 设 计 中得 到 了越 来 越 广 泛 的 应 用 . 地
作者 筒介 : 赵
其 不 可 缺 少 的 组 成 部 分 , 性 能 直 接 关 系 到 无 人 其
收 稿 日 期 : 0 0 1 -2 2 0 . 10
相 似 , 更 直 接 、 自然 的 方 法 来 描 述 和 处 理 现 实 但 更 世 界 的 各 类 问题 . 用 此 方 法 设 计 和 开 发 软 件 , 运 可
部 分 组 成 , 图 2中虚 框 所 示 . 如
1 2 用 oo 技 术 设 计 地 面 信 息 处 理 系 统 . 12 1 O 技 术 运 用 于 地 面 信 息 处 理 系 统 优 越 性 .. O
直升机 ( 以下 简 称 无 人 机 ) 测 控 系 统 中 , 过 多 的 经 次 试 飞试 验 , 足 飞 行 要 求 . 满
面 信 息处 理 系统 是 无 人 机 的 重 要 组 成 部 分 , 无 人 机 执 行 任 务 过 程 中 , 面信 息 处 理 在 地 系统 提 供 的 无 人 机 的 飞 行 参 数 和 设 备 参 数 是 飞 行 员 实 施 监 控 的 依 据 . 析 了共 轴 式 分 无 人 驾 驶 直 升 机 地 面 信 息 处 理 系统 的特 点 和 需 求 , 用 面 向对 象 的设 计 方 法 , 计 了 应 设 无 人 机 测 控 地 面 站 信 息 处 理 系 统 , 系 统 具 有 易 重 复 使 用 、 改进 、 该 易 易测 试 、 维 护 和 易 易 扩 充 等 特 点 . 过 多 次试 飞 证 明 , 系统 满 足 飞 行 要 求 . 经 该 关 键 词 :无 人 驾 驶 直 升 机 ;遥 测 ;遥 控 ;信 息 处 理 ;面 向对 象
文 针 对 共 轴 式 无 人 驾 驶 直 升 机 地 面 信 息 处 理 系 统
的需 求 和 特 点 , 用 面 向对 象 分 析 ( O 、 向 对 运 O A) 面 象 设 计 ( O 和 面 向 对 象 编 程 ( O ) 方 法 设 计 O D) O P的 了共 轴 式 无 人 驾 驶 直 升 机 地 面 信 息 处 理 系 统 . 该
从 图 1可 以看 出 , 面 信 息 处 理 系 统 在 无 人 地
机 测 控 地 面 站 中 占 有 非 常 重 要 的 地 位 . 其 是 在 尤
飞行 过 程 中 , 面 信 息 处 理 系 统 的 显 示 设 备 实 时 地
显 示 无 人 机 的 各 种 飞 行 参 数 和 状 态 参 数 , 时 显 同 示 飞 机 的 轨 迹 、 离 和 方 位 , 行 员 在 地 面 站 通 过 距 飞
系 统 不 仅 设 计 过 程 简 单 、 路 清 晰 易 懂 , 有 易 重 思 具 复使用 、 改进 、 测试 、 维护和易扩 充等特点 , 易 易 易
而 且 飞行 员 可 以在 极 短 的时 间 内 学 会 整 个 操 作 过
程 .
观 察 显 示 设 备 , 能 知 道 无 人 机 的 飞 行 状 态 , 根 就 并
据 当前 的 飞 行 状 态 , 过 遥 控 系 统 控 制 无 人 机 按 通 任务 飞行 .
地 面 信 息 处 理 系 统 主要 由视 频 遥 测 数 据 解 密
该 系 统 已应 用 于 我 国 某 型号 共 轴 式 无 人 驾 驶
和 译 码 、 控 主 机 、 示 设 备 和 数 据 记 录 与 处 理 等 监 显
维普资讯
20 年 02
8月
北 京ห้องสมุดไป่ตู้航 空 航 天 大 学 学 报
J un lo ej gUnvri f rn uisa d Asrn u c o ra fB in iest o o a t n to a t s i y Ae c i