gps数据修正
Google全国地图纠偏数据偏移数据火星坐标修正方案

Google 全国地图纠偏数据偏移数据火星坐标修正方案谷歌地图纠偏有两种精度:分别为0.01和0.001,精度为0.01:经纬度每变化0.01,取一次偏移值,共980万条,access文件约600mb,误差5~10米。
精度为0.001:经纬度每变化0.001,取一次偏移值,共9亿条,csv文件共20gb,几乎没有误差。
非常的精准,也是当前开发最牛的纠偏技术解决方案。
下面来说明如何使用国内最权威的技术方案:使用方法:1、假设原始gps数据为(73.528888,39.368888)2、查询数据库:SELECT * FROM offset where lng=73.52 and lat=39.36,得出offsetlat、offsetlng3、用原始的lat加上offsetlat,lng加上offsetlng,得出纠偏后的经纬度,可以直接在google地图上显示正确位置了。
以上方法,百度地图和谷歌地图通用,但是纠偏数据库是完全不同的,原因可以查看其他博客,有详细的说明!具体的获取方法可以QQ:2640056519,官方新浪博客/s/blog_ae91db6001014pi6.html我们平时用到的地球坐标系统,叫做WGS84坐标,国家保密插件,也叫做加密插件或者加偏或者SM模组,其实就是对真实坐标系统进行人为的加偏处理,按照几行代码的算法,将真实的坐标加密成虚假的坐标,而这个加偏并不是线性的加偏,所以各地的偏移情况都会有所不同。
而加密后的坐标也常被人称为火星坐标系统,这是我们的国家又一个伟大的发明,让国外的go-vern-ment和企业等,都看不懂我们的坐标系统。
其实很少有人知道国家保密插件问题,但作为导航电子地图产业或者汽车导航产业中的人,吧,你真实的坐标是这个,加密后就成了那个,导航电子地图上看到的就是那个,那么人家导弹要是攻击那个的时候,那么导弹就打不中我们的鸟巢啦,我们的鸟巢就安全了。
不过,个人担心这样加密后没有打中鸟巢,会不会打中水立方呢,可能是无心插柳柳成荫了。
GPS定位系统在测绘中的误差与校正方法

GPS定位系统在测绘中的误差与校正方法导言随着科技的不断发展,全球定位系统(GPS)在测绘领域中扮演着越来越重要的角色。
然而,由于多种原因,GPS定位系统在测绘过程中可能存在一定的误差。
了解这些误差以及相应的校正方法对于确保测绘结果的准确性至关重要。
误差来源GPS定位系统在测绘过程中的误差可能来自多个方面,包括天线高度、大气延迟、多径效应、钟差、轨道误差等等。
这些误差源可以归结为系统误差和随机误差两类。
系统误差是由于GPS系统本身的特点或者用户设备的特殊性引起的,例如天线高度误差可能导致信号衰减,从而影响定位精度。
解决系统误差主要依赖于设备的校正和改进。
随机误差是由于环境和人为因素而引起的不可预测的误差。
这些误差通常是临时性的,难以完全避免。
然而,通过采用合适的数据处理方法和统计模型,可以在一定程度上减小随机误差对测绘结果的影响。
误差校正方法1. 信号补偿信号补偿是校正GPS定位系统误差的一种常见方法。
例如,大气延迟是导致定位误差的一个主要因素。
通过测量大气延迟并进行相应的补偿,可以显著提高定位精度。
这可以通过使用大气模型和天气观测数据来实现。
2. 数据处理技术数据处理技术对于校正GPS定位误差也起着至关重要的作用。
其中,差分定位是一种常用的技术。
差分定位利用有两个接收机,一个处于已知位置的参考站点,另一个处于测量位置的流动站点。
通过对两个接收机接收到的信号进行比较,可以得到一个差分修正值,从而消除了两个接收机之间的共同误差。
此外,数据滤波技术也可以被用来减小随机误差的影响。
数据滤波可以通过使用滤波器对收集到的数据进行处理,去除异常值和噪声,从而提高定位精度。
3. 多系统融合多系统融合是另一种校正GPS定位误差的方法。
目前,除了GPS系统外,全球导航卫星系统(GNSS)还包括其他系统,例如格洛纳斯(GLONASS)和伽利略(Galileo)。
通过使用多个系统提供的定位信息,可以显著提高定位精度并减小误差。
手持GPS校正参数

手持GPS校正参数在现代导航系统中,全球定位系统(GPS)是一种常见的定位和导航技术,用于确定地球上的位置和获取准确的导航信息。
然而,由于各种因素的干扰,GPS系统也存在一定的误差。
为了提高GPS定位的准确性,校正参数是必需的。
校正参数是一些修正因子,可以用于调整GPS接收机的输出数据,以减小信号误差。
这些参数通常是根据地理位置和时间的特定信息来计算得出的。
下面将介绍一些常见的手持GPS校正参数。
1.卫星轨道参数:卫星轨道参数是校正GPS定位误差的关键因素之一、在GPS系统中,卫星的轨道参数是用于计算卫星位置和运动的重要数据。
根据这些参数,可以更准确地确定接收机和卫星之间的距离,从而减小误差。
2.天线相位中心:GPS接收机使用的天线相位中心参数可以减少信号传输的误差。
天线相位中心是指接收机天线的几何中心,它会影响到接收到的信号的方向。
通过准确测量天线相位中心的位置,可以降低信号传输时的偏差,提高定位的准确性。
3.地球自转参数:地球自转参数用于修正GPS定位结果中的时间偏移。
由于地球自转速度的变化,GPS定位结果可能会存在时间误差。
通过使用地球自转参数,可以准确计算出真实的地方时,并校正定位结果中的时间偏移。
4.大气延迟参数:大气延迟是GPS信号传输过程中的一个关键问题。
大气延迟会导致GPS定位结果的偏离,尤其是在大气湿度变化较大的地区。
通过使用大气延迟参数,可以校正信号在大气中的传播路径,提高定位的精度。
5.多路径效应参数:多路径效应是GPS接收机常遇到的问题之一、多路径效应发生在GPS信号从卫星到达接收机时,会被地面或建筑物反射导致多个路径的到达。
这样会导致接收机接收到多个信号时产生干扰,降低定位精度。
通过使用多路径效应参数,可以减少多路径效应对定位结果的影响。
总之,手持GPS校正参数是提高定位准确性的关键因素之一、通过使用卫星轨道参数、天线相位中心、地球自转参数、大气延迟参数和多路径效应参数来校正GPS定位结果,可以减小误差,提高定位精度。
测绘技术中常见的GPS测量误差及其处理方法

测绘技术中常见的GPS测量误差及其处理方法GPS测量误差是测绘技术中常见的一个问题,它会对测量结果的准确性和可靠性产生一定的影响。
本文将从几个方面讨论GPS测量误差及其处理方法,以帮助读者更好地理解和运用GPS测量技术。
一、GPS测量误差的来源GPS测量误差主要来自以下几个方面:1. 星历误差:GPS卫星的轨道预报存在一定的误差,这会导致卫星位置的偏差。
从而引起接收器测量结果的不准确。
2. 电离层延迟:GPS信号在通过电离层时会发生传播速度变化,从而产生延迟。
这种延迟会导致测量结果的偏移。
3. 对流层延迟:GPS信号在通过对流层时也会发生传播速度变化,引起延迟。
这个延迟主要受天气条件的影响,如温度、湿度等,会导致测量误差的增大。
4. 多径效应:GPS信号在传输过程中可能会被建筑物、树林等障碍物反射,形成多个信号路径。
这些反射信号会与直达信号叠加,导致测量结果的偏差。
二、GPS测量误差的处理方法针对GPS测量误差,我们可以采取以下几种方法进行处理:1. 差分GPS测量:差分GPS测量是一种通过同时测量参考站和待测站的方式,消除大部分GPS测量误差的方法。
通过获取参考站与待测站之间的差异,可以得到相对准确的测量结果。
2. 排除异常值:在大量的GPS测量数据中,可能存在一些异常值,这些异常值可能是由于设备故障或环境因素引起的。
通过统计学方法,可以识别和排除这些异常值,提高测量数据的可靠性。
3. 数据平滑处理:由于GPS测量误差的存在,测量数据可能存在一定的波动和不稳定性。
通过对数据进行平滑处理,可以减小误差对结果的影响,得到更加平稳的测量结果。
4. 多基线处理:对于需要测量较大区域的工程,使用多个基准站进行GPS测量可以提高精度和可靠性。
通过基线向量之间的相互比较和校验,可以减小误差的累积效应。
5. 校正模型:根据GPS测量误差的特点,可以建立相应的校正模型。
通过对误差进行建模和拟合,可以对测量结果进行修正,提高准确性。
GPS定位误差及修正算法
.
9
两者之差为:
YXcsoi sne((ettjj))
sin(etj) co se(tj)
0xj
0yj
Z 0
0
1zj
e 是地球自转角速度,且知 e =7.292115×10-5rad/s tj是卫星j的信号传播时延。
.
10
对流层误差及修正
▪ 对流层,是离地面高度50km以下的大气层,
.
16
▪ 我国在北半球中纬度地区,因此运用 Klobuchar模型对我国GPS接收机进行电离 层改正是可靠和可行的。电离层误差修正 如下式所示,
▪ 其中,F为倾斜因子
F 1 .0 1.0 6 (0 .5 3 E )3
I z 是垂直方向延迟
.
17
.
18
.
19
.
20
.
21
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!
.
7
相对论效应修正
▪ 虽然经过上述改正,但是相对论效应所产生的时 间偏移并非常数,对于某一给定偏心率e的GPS卫 星,一阶相对论效应改正如下:
e为偏心率,F
2
c2
其中, = 3.986005E+14m3/sec2;
C=2.99792458E+8 m/sec; F=-4.442807633×10-10 s / m
.
5
Hale Waihona Puke ▪ 各颗卫星的星钟误差 修正如下式:
其中,a0,a1,a2,to,c都可以从导航电文中得到。
a 0 :相对于GPS时系的时间钟差; a 1 :相对于实际频率的偏差系数(钟速) a 2 :时钟频率的飘移系数(钟速变换率,及钟漂); t oc :第一数据块的参考时间
对GPS高程累计误差的分析与修正
对GPS 高程累计误差的分析与修正本教程为Loor 爱好者群(3035043)所写,欢迎加入Loor 爱好者群,获取更多有用资讯和地图导航数据。
最近有好多朋友问,手机用什么软件记录的轨迹准,也有朋友问,为什么GPS 记录的轨迹高度误差这么大。
为什么各软件统计结果不一样。
本讲教程对这个问题进行一个综合回复。
本讲教程比较枯燥,所以各位朋友自行判断是否阅读,如果不想看实验,那么看1/2/4节就行。
同时,第五节是可以不知道的东西,所以看不看无所谓。
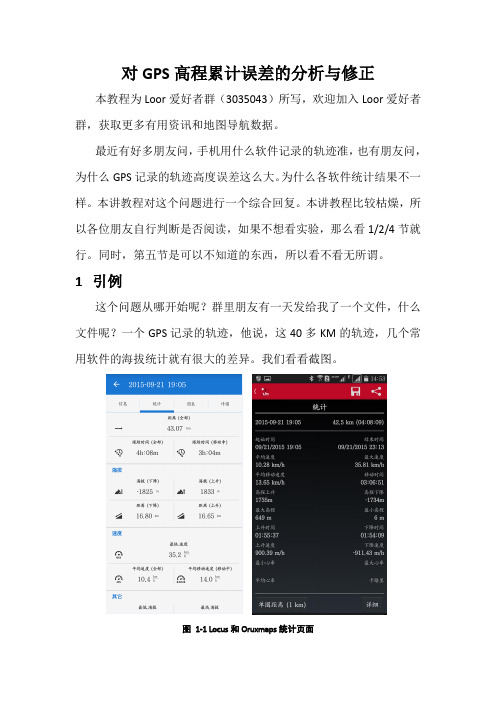
1 引例这个问题从哪开始呢?群里朋友有一天发给我了一个文件,什么文件呢?一个GPS 记录的轨迹,他说,这40多KM 的轨迹,几个常用软件的海拔统计就有很大的差异。
我们看看截图。
图 1-1 Locus 和Oruxmaps 统计页面我们可以看到,在Locus中,统计里程为43.07Km,海拔爬升1833m,海拔下降1825m。
在Oruxmaps中,海拔上升为1735m,海拔下降为1734m。
按说,40KM爬升下降不到2KM,似乎也能接受。
那么我们来看看谷歌地球给出的统计。
图1-2 谷歌地球统计看不清是吧,我想大家也看不清,因为我也从这个小图看不见细节。
那么,来个大图。
图1-3 GE统计放大首先,GE给出来的统计是,爬升1647m,下降1634m。
看起来和Lo、or统计的误差不大。
但是,合理么?注意左侧海拔图标的纵轴标签,一个神奇的事情发生了,什么?这座山最大海拔才650m。
这个轨迹不过是骑行到山顶,又放坡下来。
往返一圈,怎么就在一个海拔才650的小山头骑出了进2000m的海拔落差呢?于是,又把这个轨迹导入其他的各种软件进行测试,有的说爬升800多,有的说1200多,最大的达到了3895m。
总之,都不统一,那么问题来了,谁是对的。
如果你觉得这是个问题,那么文本就正式开始了。
2为什么GPS记录的海拔不准通过前面的一个引例发现,这GPS记录的轨迹,还真是有问题,给出来的海拔统计,这最小(800)和最大(1800)差距已经超过了一倍。
TBCGPS数据处理简要流程

TBCGPS数据处理简要流程GPS(全球定位系统)数据处理的流程通常包括数据采集、数据预处理、信号解算、数据校正和数据分析等几个主要步骤。
下面将详细介绍GPS数据处理的流程。
1.数据采集:GPS接收器通过接收卫星发送的信号来确定位置,同时还可以记录位置、速度和时间等相关数据。
数据采集可以是实时进行的,也可以是离线的。
实时数据采集通常用于车辆导航、移动设备和船舶等实时定位应用;离线数据采集通常用于科学研究和数据分析等领域。
2.数据预处理:数据预处理包括数据清洗、野值处理和补偿等步骤。
数据清洗是指去除采集到的异常数据,如误差较大或无效的数据点;野值处理是指对异常数据进行修正或剔除处理,以提高数据的准确性;补偿是指对时钟误差、电离层延迟和大气延迟等误差进行校正,以提高数据的精度。
3.信号解算:信号解算是指根据接收到的卫星信号,计算出接收器的位置和速度等信息。
通常有单点解算、差分解算和网络解算等方法。
单点解算是指仅使用单个接收器进行位置计算,精度较低;差分解算是指使用多个接收器共同进行位置计算,通过测量接收器间的差异来降低误差,精度较高;网络解算是指利用网络连接的多个接收器进行位置计算,进一步提高精度。
4.数据校正:数据校正是指对解算得到的位置和速度进行修正,校正的目的是提高数据的准确性和一致性。
校正方法包括永久性(如大地水准面)和临时性(如地球自转、地壳运动)的校正。
永久性校正通常使用大地基准系统来修正解算结果,临时性校正则根据地球运动的模型来修正解算结果。
5.数据分析:数据分析是指对解算得到的位置和速度等数据进行统计、计算和分析,以提取有用的信息。
数据分析可以包括轨迹分析、速度分析、加速度分析和位置相关性分析等。
轨迹分析用于研究物体的运动路径和行为;速度分析用于研究物体的运动速度和变化;加速度分析用于研究物体的运动加速度和变化;位置相关性分析用于研究不同位置之间的相关性和空间分布。
综上所述,TBCGPS数据处理的流程包括数据采集、数据预处理、信号解算、数据校正和数据分析等几个主要步骤。
基于自适应“当前”统计模型GPS测量数据的修正

第 4期
大
连
交 通
大
学 学
报
Vo 1 . 3 4 No . 4 Au g. 201 3
2 0 1 3年 8月
J OURNA L OF DAL I AN J I AOT ON G UNI V ERS I T Y
文章编号 : 1 6 7 3 — 9 5 9 0 ( 2 0 1 3 ) o 4 — 0 I l 2 一 O 4
基 于 自适 应 “ 当前 " 统 计 模 型 GP S测量 数 据 的修 正
黄杰, 林怡青 , 彭 美春
( 广 东工 业 大 学 机 电工 程 学 院 , 广东 广州 5 1 0 0 0 6 ) 米
摘
要: 针对 G P S测量实际道路车速 中存在的突变野值问题 , 提 出改进的 自适应“ 当前” 统计模型, 该模
“ 当前 ” 统 计模 型更加 切合 实际 . 最 后 通过 车辆 的
依赖卫星通信 , 信号传输过程 中存在很多不确定 因素 . G P S测 量 的数 据 中经 常 随机 出 现 一些 野 值 点 j , 实际测 量 车速 中经 计 算甚 至 出现 加 速度 超 过车辆本身具有 的加速或制动能力 . 作为初始 数据 本身 , 影响也 许不 太大 , 但作 为许 多应用 领域 的基 础 数 据 , 渗入各类模型 , 通 过 各 种 公 式 的转 换、 误 差经 过 传递 、 放大 , 可 能 对相 关 的研 究 产 生 严重 的影 响. 因此 , 研究 如 何通过 后处 理减 少 G P S 的测 量误 差是 一个很 重要 的 问题 .
卡 尔曼最 优估计 是处 理 随机误差 一种 有效 手 段, 通 过选用 切 实 的跟 踪模 型估 计 目标 最 优 值从 而 提供更 可靠 的 数据 . 周宏 仁 教 授 提 出 的机 动 目 标“ 当前 ” 统计 模型 应用 卡 尔 曼估 计 理论 , 用 修 正 的瑞利 分布描 述 机 动加 速 度 特性 , 比较 符 合 实 际 跟踪 需求 j . 机 动频率 是 “ 当前 ” 统 计 模 型 中一个 重要 的参数 , 机动 频率一 般预 先人 为设定 为定值 , 然而在 实 际 中很 难 事 先知 道 机 动 频率 的精 确值 , 且 机动 频率 可能 是 时变 的 J . 因此 机 动频 率 只有 实时按 照机 动水 平 调 整才 能 保 证 跟踪 精 度 , 减 少 出现 跟踪震 荡 和偏 离 现象 . 本 论 文在 机 动 频率 自
GPS测量中的钟差分析与校正方法

GPS测量中的钟差分析与校正方法导语:全球定位系统(GPS)作为一种广泛应用于测量、导航和定位的技术,已经成为我们生活中不可或缺的一部分。
然而,在GPS测量中,由于钟差的存在,会对测量结果产生较大的影响。
因此,研究GPS测量中的钟差分析与校正方法,对于提高测量精度和准确性具有重要意义。
一、GPS钟差的概念与影响钟差是指卫星钟和地面接收机钟之间的时间差。
由于卫星钟和地面接收机钟的精度不完全相同,且在转运和存储过程中会受到一系列因素的影响,导致钟差的产生。
GPS信号的传播时间是依靠测量卫星钟和地面接收机钟的差值来进行计算的,而钟差就是这个差值。
钟差对GPS测量结果的影响是很大的。
首先,钟差会导致定位结果的误差,从而影响导航精度;其次,钟差还会产生测距误差,使得测量结果的精度下降。
二、钟差分析方法在GPS测量中,钟差分析是一项基础工作,可以通过对各个卫星钟差进行分析来获得更加准确的测量结果。
1. 基于卫星轨道数据的钟差分析卫星轨道是描述卫星位置和运动状态的重要参数,通过对卫星轨道的分析,可以得到卫星钟差的近似值。
利用卫星轨道数据,可以计算出预测的钟差值,从而在GPS测量中进行校正。
2. 基于接收机测量数据的钟差分析接收机测量数据中包含了卫星信号的到达时间和接收机钟的读数,通过对接收机测量数据的分析,可以计算出实际的钟差值。
这种方法相对精确,但需要进行复杂的算法计算。
3. 综合分析法综合分析法是一种将卫星轨道数据和接收机测量数据进行综合分析的方法,可以得到更加准确的钟差值。
通过将两者的数据进行整合和比较,可以排除各自的误差,从而提高钟差的准确性。
三、钟差校正方法在得到钟差值之后,需要进行校正以提高GPS测量的准确性。
1. 即时校正法即时校正法是指在GPS测量过程中,根据实时的钟差值对测量结果进行修正。
这种方法实时性强,但精度相对较低。
2. 分析校正法分析校正法是指在GPS测量后,通过对钟差进行进一步分析,得到更加准确的校正值。
GPS校正的原理

GPS校正的原理
GPS校正是通过对接收到的卫星信号进行修正,以提高GPS 定位准确度的过程。
GPS系统是由全球定位系统卫星和地面接收器组成的。
卫星发射的信号会传播到地球上的接收器,接收器通过计算信号传播的时间来确定自身的位置。
然而,地球上的大气层对卫星信号的传播会产生干扰,从而影响到GPS系统的精度。
其中最主要的干扰源是大气层中的电离层。
电离层是一个由高层大气中的电离气体构成的区域,会对卫星信号的传播速度和路径产生影响。
为了校正这种干扰,GPS系统使用了两种主要的校正方法:数字地形模型(DTM)校正和差分GPS校正。
数字地形模型校正是利用地面上的数字地形模型数据,通过计算卫星信号在地球表面上传播的路径差异来校正定位误差。
数字地形模型是一个描述地球表面高程变化的模型,包括山脉、河流、湖泊等地形要素。
通过对卫星信号的路径进行修正,可以更准确地确定接收器的位置。
差分GPS校正是利用两个或多个接收器同时接收卫星信号,并进行相互之间的比较来进行校正。
其中一个接收器称为基准站,它的准确位置已知。
其他接收器称为流动站,它们的位置需要测量。
通过比较基准站和流动站接收到的信号,可以计算出流动站的误差,并对其进行校正。
无论是数字地形模型校正还是差分GPS校正,它们都可以提
供更准确的GPS定位结果。
这些校正方法使GPS系统在不同环境和天气条件下都能保持较高的定位精度,使GPS成为了现代导航和定位系统中的关键技术。
GPS轨迹数据纠偏方法研究

GPS轨迹数据纠偏方法研究GPS轨迹数据纠偏是指根据GPS接收器定位的原始数据,采用一定的方法对其进行修正和纠正,以获得更准确、更平滑的轨迹数据。
GPS轨迹数据纠偏在定位导航、实时交通监测、地图绘制等领域具有广泛的应用。
本文将对GPS轨迹数据纠偏的方法进行研究和分析。
GPS定位原理是利用卫星信号和接收器的测距原理来计算导航接收器的位置。
然而,在实际应用中,由于多种原因(如信号遮挡、多径效应、大气折射等),GPS接收器的定位数据会产生一定的误差。
因此,对GPS 轨迹数据进行纠偏处理是必要的。
在GPS轨迹数据纠偏方法中,最常用的方法是基于线性插值和曲线拟合的方法。
线性插值方法通过已知点之间的线性插值,推算出中间位置的估计值。
这种方法简单易行,但精度相对较低。
曲线拟合方法则通过拟合轨迹点的函数曲线来计算位置,能够更好地逼近原始轨迹数据,因此精度较高。
另外,还有一些基于地理信息系统(GIS)的纠偏方法,如基于地理特征的纠偏方法和基于轨迹分析的纠偏方法。
基于地理特征的纠偏方法通过对地理特征进行分析,根据道路、河流等地理特征的几何形状,对轨迹数据进行纠偏。
基于轨迹分析的纠偏方法则是通过对轨迹点的速度和方向进行分析,利用轨迹的连续性和平滑性来对轨迹数据进行纠偏。
除了上述方法,还有一些改进的GPS轨迹数据纠偏方法被提出,如基于卡尔曼滤波的方法、基于粒子滤波的方法、基于神经网络的方法等。
这些方法在一定程度上能够提高GPS轨迹数据的纠偏精度,但也需要更复杂的计算和更大的计算资源。
综上所述,GPS轨迹数据纠偏是一项重要的研究课题。
目前的纠偏方法主要包括线性插值和曲线拟合方法、基于地理信息系统的纠偏方法、基于轨迹分析的纠偏方法,以及一些改进的纠偏方法。
这些方法在实际应用中有着各自的优缺点,需要根据具体需求选择合适的方法。
未来的研究方向可以探索更先进、更精确的GPS轨迹数据纠偏方法,以应对不同应用场景的需求。
测绘技术中的GPS航迹数据处理方法

四、数据校正
数据校正是为了解决GPS数据中的几何变形和非线性误差。由于GPS信号在传播过程中可能会发生多径效应、大气延迟等问题,导致测量结果的误差增加。因此,需要对数据进行校正以提高测量的准确性。
五、数据处理和应用
经过数据预处理和校正后,可以进行数据处理和应用。根据实际需要,可以采用以下几种处理方法。
1.轨迹提取:将航迹数据中的轨迹信息提取出来,以得到航迹的路径和轨迹点。可以通过连接连续的GPS测量点来得到轨迹线段,并进行平滑处理以去除噪声。
2.航迹分析:对航迹数据进行分析,提取出有用的信息。例如,可以计算航迹的长度、速度、方向等参数,以评估航迹的特征和性能。
三数据预处理
数据预处理是为了减少噪声和异常值对后续处理的干扰,提高数据质量。常用的预处理方法包括以下几个方面。
1.数据质量检查:对采集到的原始数据进行质量检查,包括检查是否有缺失数据、是否有信号中断等异常情况。可以通过观察数据的变化趋势、信号强度等指标进行初步判断。
2.数据滤波:利用滤波算法对数据进行平滑处理,以去除噪声和异常值。常用的滤波方法有均值滤波、中值滤波、卡尔曼滤波等。需要根据实际情况选择合适的滤波算法和参数。
3.航迹匹配:将航迹数据与地图进行匹配,以获取更精确的定位结果。可以利用地图匹配算法,将航迹数据与地图数据进行比较和匹配,从而得到更准确的位置信息。
4.航迹可视化:将航迹数据以可视化的方式展示出来,以直观地观察和分析。可以使用地图软件或可视化工具,将航迹数据绘制在地图上或以其他形式进行展示。
六、总结
测绘技术中的GPS航迹数据处理方法
GPS测绘仪的基本操作与校准方法
GPS测绘仪的基本操作与校准方法GPS(全球定位系统)测绘仪是当今测绘领域中不可或缺的工具之一。
它利用卫星信号确定地球上某一点的准确位置,并通过收集、处理和分析数据来生成地图、测绘图等相关信息。
在使用GPS测绘仪进行实地测量之前,了解其基本操作和校准方法是非常重要的。
一、基本操作1. 准备工作使用GPS测绘仪之前,首先需要确保设备电量充足并具备信号接收能力。
同时,在测量前应校准测量仪器,以确保数据的准确性。
另外,应在测量区域确定好控制点,为后续数据的处理提供准确的基准。
2. 启动设备将GPS测绘仪接通电源,按照设备的启动指示进行开机操作。
启动后,设备会自动搜索卫星信号,直到接收到足够数量的信号后方可进行测量。
此过程一般需要几分钟的时间,请耐心等候。
3. 设置参数在进行测量之前,需要针对具体的测量任务设置一些参数,如测量方式(单点定位、差分测量等)、坐标系(经纬度、UTM等)以及测量精度等。
根据实际需要,灵活调整这些参数以获得尽可能准确的测量结果。
4. 进行测量一切准备就绪后,开始进行实地测量。
在移动时,保持设备的稳定,避免突然加速或急刹车等行为,以免对测量结果产生干扰。
同时,注意周围环境,如建筑物、树木等可能影响到卫星信号的存在。
5. 数据记录在测量过程中,设备会不断记录并存储数据。
根据需要,可以设定间隔时间以控制记录点的密度。
记录完成后,将数据导出到计算机或其他设备上进行后续处理和分析。
二、校准方法1. 静态校准GPS测绘仪的静态校准方法主要针对卫星信号接收的误差问题。
使用此方法时,首先将测绘仪放置在开阔的地方,并保持静止不动。
然后,根据设备提供的菜单操作步骤,进行静态校准。
此过程可能涉及到输入一些参考数据或信号修正参数。
2. 动态校准动态校准适用于GPS测绘仪在移动时产生误差的纠正。
在进行动态校准之前,需要确定一个已知坐标的控制点作为基准。
然后,携带测绘仪进行一段已知距离和方向的移动。
移动结束后,将实际测量得到的坐标与已知控制点的坐标进行比对,进而计算出校准参数。
2023修正版GPS管理办法

GPS管理办法GPS管理办法1. 引言GPS(全球定位系统)是一种卫星导航系统,用于确定地理位置和时间。
在现代社会中,GPS已经广泛应用于航空、航海、交通运输、军事等领域,并且被普遍应用于智能方式、汽车导航系统等消费电子产品中。
为了合理使用和管理GPS系统,在各个领域普及GPS设备的同时,制定GPS管理办法也变得尤为重要。
2. 目的和范围本文档的目的是为各个领域的GPS设备用户提供一套完整的管理办法,以确保GPS系统的正常运行与使用。
本文档适用于所有涉及GPS设备的领域,包括但不限于航空、航海、交通运输、军事和消费电子等方面。
3. GPS设备使用规范3.1 GPS设备的选择和购买- 选择具有良好信誉和品牌的GPS设备供应商,并确保其产品符合国家相关标准和规定。
- 根据实际需求选择合适的GPS设备型号和功能,避免盲目购买不必要的功能。
3.2 GPS设备的安装和维护- 在安装GPS设备时,确保设备接收到的信号不会受到遮挡或干扰,以确保定位的准确性和可靠性。
- 定期对GPS设备进行维护和检修,包括清洁设备表面、检查电池寿命和充电状态等。
3.3 GPS设备的使用- 在GPS设备使用过程中,应按照设备说明书的要求进行操作,并遵守相关法律和规定。
- 使用GPS设备时,切勿分散注意力,以免造成交通事故或其他意外。
4. 数据隐私和安全规定4.1 GPS数据的收集和存储- GPS设备用户在收集和存储数据时,应遵守相关隐私和数据保护法律法规,并在事先获得被监控对象的同意。
- GPS数据应妥善保存,防止丢失或被非法获取,并定期进行备份。
4.2 GPS数据的使用和共享- GPS数据的使用应在合法的前提下进行,禁止利用GPS数据进行非法活动或侵犯他人隐私。
- 当需要共享GPS数据时,应事先征得相关当事人的同意,并确保数据的安全性。
4.3 GPS数据的销毁- 当GPS设备用户不再需要某些GPS数据时,应及时销毁这些数据,以确保不会被滥用或泄露。
GPS轨迹数据纠偏方法研究

GPS轨迹数据纠偏方法研究随着移动互联网的发展和GPS技术的普及,GPS轨迹数据的应用范围越来越广泛,如车辆监控、运输物流、旅游导航等领域。
然而,由于各种原因(如信号遮挡、信号弱、多径效应等),GPS轨迹数据存在着一定的误差,需要进行纠偏处理。
本文将介绍GPS轨迹数据纠偏的相关方法和研究进展,以及存在的问题和挑战。
目前,对GPS轨迹数据进行纠偏的方法主要包括基于地图匹配的方法、基于传感器数据的方法和基于机器学习的方法。
其中,基于地图匹配的方法是最常用的一种方法。
该方法通过将GPS轨迹数据与地图数据进行匹配,找出最可能的轨迹路径,并进行修正。
这种方法的优点是简单易实现,且准确率较高。
然而,这种方法也存在一些缺点,如对道路网络数据的要求较高、对数据量的处理能力有限等。
另一种方法是基于传感器数据的方法。
该方法通过使用陀螺仪、加速度计等传感器数据来校正GPS轨迹数据,提高数据的准确性。
这种方法的优点是可以减少对地图数据的依赖,提高纠偏的速度和精度。
然而,这种方法也存在一些缺点,如传感器数据的噪声干扰、设备成本高等。
最近几年,基于机器学习的方法在GPS轨迹数据纠偏领域也取得了一些进展。
这种方法通过构建模型,对GPS轨迹数据进行学习和预测,从而实现数据的纠偏。
机器学习方法的优点是可以根据数据的特征自动学习和调整,提高纠偏的准确性和效率。
然而,这种方法也存在一些挑战,如需要大量的标注数据、模型的训练和调优过程复杂等。
在GPS轨迹数据纠偏领域还存在一些问题和挑战。
首先,随着移动设备的普及和GPS技术的发展,GPS轨迹数据的规模和复杂度不断增加,如何有效地处理大规模数据是一个值得研究的问题。
其次,不同的应用场景对GPS轨迹数据的准确性和实时性要求不同,如何根据具体的需求选择合适的纠偏方法也是一个挑战。
最后,如何提高GPS轨迹数据的隐私性和安全性也是一个需要研究的问题。
GPS定位误差修正方法的研究

GPS定位误差修正方法的研究传统的GPS定位系统存在着一定的误差,这主要是由于卫星信号传播过程中会受到大气延迟、多径效应、钟差等因素的影响所导致的。
为了进一步提高GPS定位的准确性,研究者们提出了多种方法对这些误差进行修正。
本文将对GPS定位误差修正的方法进行详细的研究和分析。
首先,GPS定位误差的修正可以通过使用差分定位方法来实现。
差分定位是一种利用参考站和用户接收机之间的差异进行准确定位的技术。
它通过比较参考站的准确位置和用户接收机测得的位置来计算出误差,并将其应用于其他用户接收机的定位中。
这种方法可以显著降低定位误差,提高定位的精度。
另外,利用卫星和地面站的测控数据进行定位误差修正也是一种常用的方法。
卫星和地面站的测控数据包括卫星的轨道参数、钟差等信息。
通过使用这些数据,可以对卫星信号传播过程中的误差进行修正。
例如,在计算卫星位置时,可以使用卫星的轨道参数来纠正轨道误差;在计算接收机钟差时,可以利用卫星和地面站的钟差数据来进行修正。
此外,通过使用外部参考数据也可以对GPS定位误差进行修正。
外部参考数据可以是地图数据、地形数据、建筑物数据等。
通过将这些数据与GPS测得的位置进行比较,可以找出定位误差并对其进行修正。
例如,在城市区域使用GPS定位时,由于建筑物和高层建筑的遮挡,会导致GPS信号的多径效应增强,从而造成定位误差。
通过使用建筑物数据,在计算GPS定位时可以将建筑物的阻挡效应考虑在内,从而提高定位的准确性。
此外,利用多个卫星的信号进行合并定位也是一种有效的误差修正方法。
通过使用多个卫星的信号,可以同时测量多个方向上的距离,并通过三角定位原理计算出接收机的准确位置。
这种方法不仅可以提高定位的准确性,还可以减小由于单个卫星信号传播过程中的误差导致的定位误差。
最后,利用地球物理模型进行误差修正也是一种常用的方法。
地球物理模型可以描述地球表面上的大气延迟和多径效应等因素,通过使用这些模型,可以将定位误差进行修正。
GPS精确测量加入相对论修正分析

GPS精确测量加入相对论修正分析GPS(全球定位系统)是一种利用卫星定位和测量接收器来确定地球上任意一点位置的技术。
然而,由于相对论效应的存在,GPS测量结果可能会产生误差。
因此,加入相对论修正对GPS精确测量非常重要。
相对论修正是指根据相对论理论对测量结果进行修正,以消除相对论效应引起的误差。
根据爱因斯坦的相对论理论,时钟在高速运动和重力场中会出现时间的变化,这就是所谓的相对论时间膨胀效应。
由于GPS是使用卫星时钟进行测量,因此必须考虑这种相对论效应。
首先,我们需要考虑相对论时间膨胀效应对GPS测量结果的影响。
由于GPS卫星的速度较高,接近光速,相对论时间膨胀效应会导致卫星时钟比地面时钟快。
根据相对论理论,速度越快,时间膨胀效应越大。
因此,需要对卫星时钟进行修正,以消除这种时间膨胀效应引起的误差。
这样,我们才能获得更准确的测量结果。
其次,地球的重力场也会对GPS测量结果产生影响。
根据相对论理论,位于较强的重力场中的时钟会比位于较弱的重力场中的时钟慢。
由于卫星距离地球较远,位于较弱的重力场中,相对论引起的时间膨胀效应导致卫星时钟比地面时钟慢。
因此,需要对卫星时钟进行修正,以消除由于地球重力场引起的相对论误差。
此外,相对论修正还需要考虑空间扭曲效应。
根据相对论理论,重力会扭曲时空,使光线的传播路径发生偏移。
这种空间扭曲效应也会对GPS测量结果产生影响。
为了准确测量位置,必须对这种扭曲效应进行修正。
为了加入相对论修正,GPS系统中的卫星必须配备精密的原子钟。
这些时钟能够在高速运动和重力场中保持稳定,并且能够进行实时的时间膨胀修正。
同时,GPS接收器也需要能够接收和处理从卫星发射的修正信号,并将其应用于测量结果。
在实际应用中,加入相对论修正后的GPS测量结果更加准确。
这对于许多领域都具有重要意义。
例如,在航空航天、导航和地质勘探等领域,需要高精度的位置测量。
相对论修正的加入可以提高GPS测量的精度,从而提高导航系统的准确性和可靠性。
利用软件算法改善车载终端GPS定位漂移的问题

利用软件算法改善车载终端GPS定位漂移的问题利用软件算法改善车载终端GPS定位漂移的问题随着社会的发展和科技的进步,汽车已经成为了现代人生活中的一部分,车载终端GPS定位系统不仅为驾驶员提供导航服务,还具备交通信息查询、车辆追踪等功能。
然而,由于各种原因,如环境干扰、天气条件等,车载终端GPS定位系统可能会出现定位漂移的问题,导致定位准确度下降,给用户带来了不便和不安全因素。
车载终端GPS定位漂移的问题主要是由卫星信号传输中的差异性噪声、速度突变、信号多路径等因素引起的。
为了提高车载终端GPS定位系统的准确性,许多研究人员致力于开发和优化软件算法。
首先,我们可以通过改进卫星信号处理算法来改善定位漂移问题。
目前常用的定位算法有WAAS(Wide Area Augmentation System)、DGPS(Differential GPS)和RTK (Real-Time Kinematic)。
WAAS是一种增强型卫星系统,通过在地面上分布的监测站校正卫星信号,提高了定位精度。
DGPS通过获取附近测量点的辅助数据,对接收到的卫星信号进行差分计算,从而消除大部分误差。
RTK则是一种实时运算的动态定位技术,利用测量基站和移动站之间的相对距离信息来提高定位精度。
通过优化这些算法,我们可以有效减少定位漂移问题。
除了改进卫星信号处理算法外,我们还可以利用运动传感器数据对车辆的行驶状态进行精确估计,进一步改善车载终端GPS定位的准确性。
运动传感器包括加速度计、陀螺仪和磁强计等,可以感知车辆的加速度、角速度和方向等信息。
通过将运动传感器数据与GPS定位数据进行融合,可以提高系统对车辆位置和速度的估计精度,从而减小定位漂移的影响。
另外,利用地图匹配算法也是改善车载终端GPS定位漂移问题的一种有效方法。
地图匹配是将GPS定位数据与电子地图数据进行匹配,利用地图数据中的道路几何特征和限速信息等来修正GPS定位的不准确性。