AVR单片机定时器输出PWM的设计及注意问题
AVR单片机定时器输出PWM的设计及注意问题

一、定时/计数器PWM设计要点根据PWM的特点,在使用ATmega128的定时/计数器设计输出PWM时应注意以下几点:1.首先应根据实际的情况,确定需要输出的PWM频率范围,这个频率与控制的对象有关。
如输出PWM波用于控制灯的亮度,由于人眼不能分辨42Hz以上的频率,所以PWM的频率应高于42Hz,否则人眼会察觉到灯的闪烁。
2.然后根据需要PWM的频率范围确定ATmega128定时/计数器的PWM工作方式。
AVR定时/计数器的PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
3.快速PWM可以的到比较高频率的PWM输出,但占空比的调节精度稍微差一些。
此时计数器仅工作在单程正向计数方式,计数器的上限值决定PWM的频率,而比较匹配寄存器的值决定了占空比的大小。
PWM频率的计算公式为:PWM频率 = 系统时钟频率/(分频系数*(1+计数器上限值))4.快速PWM模式适合要求输出PWM频率较高,但频率固定,占空比调节精度要求不高的应用。
5.频率(相位)调整PWM模式的占空比调节精度高,但输出频率比较低,因为此时计数器仅工作在双向计数方式。
同样计数器的上限值决定了PWM的频率,比较匹配寄存器的值决定了占空比的大小。
PWM频率的计算公式为:PWM频率 = 系统时钟频率/(分频系数*2*计数器上限值))6.相位调整PWM模式适合要求输出PWM频率较低,但频率固定,占空比调节精度要求高的应用。
当调整占空比时,PWM的相位也相应的跟着变化(Phase Correct)。
7.频率和相位调整PWM模式适合要求输出PWM频率较低,输出频率需要变化,占空比调节精度要求高的应用。
此时应注意:不仅调整占空比时,PWM的相位会相应的跟着变化;而一但改变计数器上限值,即改变PWM的输出频率时,会使PWM的占空比和相位都相应的跟着变化(Phase And Frequency Correct)。
8.在PWM方式中,计数器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。
单片机PWM输出接口设计与应用
单片机PWM输出接口设计与应用导言单片机(Microcontroller,简称MCU)作为现代电子科技领域的一个重要组成部分,广泛应用于各个领域,如家电、汽车电子、工业自动化等。
其中,PWM (Pulse Width Modulation,脉冲宽度调制)技术是单片机中重要的功能之一,通过对固定频率的方波的占空比调节,实现对输出信号的精确控制。
本文将介绍单片机PWM输出接口的设计与应用,包括PWM原理、接口设计步骤以及常见应用案例。
一、PWM原理PWM技术是一种将模拟信号转换为数字信号的调制技术,通过调整数字信号的脉冲宽度来控制输出信号的电平。
实现PWM的关键在于控制器对方波的占空比进行调节。
PWM信号的频率是固定的,周期为T,通常单位为微秒。
占空比(Duty Cycle)是指方波中高电平部分所占的时间比例,通常用百分比来表示。
占空比的改变决定了输出信号的高低电平持续时间的变化,从而控制被驱动设备的工作状态。
二、单片机PWM输出接口设计步骤1. 确定单片机型号:选择适合的单片机芯片,具有PWM功能的引脚或专用PWM模块。
2. 确定输出电平及频率:根据实际需求确定输出信号的高低电平以及频率。
不同的应用场景对电平和频率的要求可能不同。
3. 确定占空比调节方式:PWM信号的占空比调节方式有多种,包括软件调节和硬件调节。
软件调节可以通过对PWM寄存器进行编程来实现,而硬件调节一般是通过外部模块或电位器进行调节。
4. 连接外部电路:根据选定的单片机型号和引脚,将单片机的PWM引脚与外部电路(如LED、电机等)进行连接。
5. 编写程序:根据选定的单片机型号和开发环境编写相应的PWM输出程序。
在程序中设置PWM的频率、占空比以及相关参数。
6. 调试与测试:将单片机连接至供电电源,并通过示波器或其他测试工具观察PWM信号的波形,确保输出正常。
三、单片机PWM输出接口的应用1. LED亮度控制:通过PWM技术可以实现对LED灯的亮度控制。
AVR单片机项目8.4 PWM

项目8.4 PWM模式调光控制
【项目任务】
利用ATmega16单片机内部的定时/计数器的PWM 功能,对LED灯进行调光控制,通过外部信号触 发,改变PWM的占空比实现LED灯渐明渐暗显示 效果。
【项目任务】
自主搭建硬件电路(硬件实际电路图)
【项目知识点与技能点】
知识点:
1、ATmega16单片机的定时/计数器2的结 构、类型及其功能。 2 、与定时 / 计数器 2 有关的寄存器的功能 及设置。 3、定时/计数器2快速PWM模式
【项目知识准备】
二、定时器工作模式:快速PWM模式
OC2---PD7
OC2输出的PWM波形的频率:
256
N代表分频因子(1、8、64、256或1024)。
【项目知识准备】
二、定时器工作模式:快速PWM模式
PWM原理框图如下图所示:
S1
时钟源
定时器计数器
溢出标志TF
S2 中断请求
比较器
PWM输出
比较寄存器
PWM输出的最大特点是波形的频率恒定,波 形的占空比D却可以改变。占空比的改变很具有实 际意义,例如小功率直流电机的驱动与调速,其方 法就是控制电机电枢电压接通和断开的比值来驱动 电机和改变电机的转速,这种方法称为脉宽调速法。
【项目知识准备】
一、 PWM输出原理与方法 PWM为脉冲宽度调制。PWM输出的一般形式为一系列 的脉冲波形。如下图所示。 设脉冲的周期为,高电平持续时间为t,则t与之比定义 为PWM的“占空比”,用D表示,即D=t/。
【项目知识点与技能点】
技能点:
1 、掌握单片机系统内部定时 / 计数器 2 和定 时的使用方法,并能合理运用到实际项目 中; 2、通过C语言和汇编语言编程实现对单片机 内部定时计数器2的配置; 3、系统硬件设计的实现,功能的软件技术实 现以及功能实现的综合调试能力。
AVR单片机定时器CTC输出PWM模式

AVR单片机定时器CTC输出PWM模式
第一篇:AVR单片机定时器CTC输出PWM模式
CTC:比较匹配时清零计数器模式。
当计数器TCNT0的数值等于比较寄存器OCR0时计数器TCNT0自动清零。
OCR0定义了计数器的最大(TOP)值,这个模式使得用户可以很容易地控制比较匹配输出的频率。
T/C0的比较输出脚为OC0(PB3),PB口的第三脚,在此模式下可以在OC0上输出PWM控制外部设备。
例如:在OC0脚上输出20HZ的方波信号,方波的周期时间为T=1/20HZ=0.05秒=50ms,半个周期为25ms,系统采用8MHZ晶振,1024分频,时钟计数频率为8000000/1024=7812.5HZ,每个时钟脉冲时间为1/7812.5=0.128ms,定时25ms的计数值为25ms/0.128ms=195,将195赋值为T/C0的比较寄存器OCR0,启动定时器后,TCNT0从0开始计数,当计数到195时,产生比较中断,在OC0脚上输出20HZ的占空比为50%的方波信号。
操作过程如下:
一、I/O管脚初始化:PB3(OC0)脚设为输出,DDRB|=(1<
二、使能全局中断:SREG=0X80;。
AVR单片机实现的直流电机PWM调速控制器

控制软件设计。设计了。可实现两个编码器信号的采集。 对INT1的中断次数计数来测量通道B的脉冲数,读取PC6 (即A相信号)的电平状态来判断电机
的转动方向。以上升沿触发为例,即当B路信号的上升沿 引起中断时,单片机判断PC6信号的电平高低。若PC6为 低电平,则电机为正转,计数器N的值加
动接口软件的程序如下:outocrlaH,temp19是控制输出 量,其再以PWM形式输出outocrlaL,tempi8为正传位反 转3,从实
验曲线可以看出,超调量小于10%,稳定时间为150ms左 右,稳态误差小于5%.系统具有较好的快速性和控制精度。 4结束语直流调速控制器采用AV
R单片机8535,实现了对直流电机的PWM调速控制。从实 际运用来看,它较好的实现了对直流电机的速度控制, 并具有精度高、快速响应性好、稳定性好
只承受单极性的电压;双极性工作方式是指在一个PWM 周期内电机电枢两端的电压呈正负变化。调速控制系统 采用的是单极性工作方式。单片机的EnB引脚
,它控制着电机转速大小;单片机的PD6或PD7经过一定 的逻辑电路接到L298的IN1~IN4输入引脚上,它控制电机 的转动方向。为了增强L29
8的驱动能力,本调速控制系统对L298的两路驱动进行了 并联使用,最大驱动能力可以达到3A.比较器LM393主要 起到了限制过流和保护L298的
Hale Waihona Puke 作用。LM393的同相端直接连到了一个可变电位计上,电 位计的电压是可调的。调节电位计的电压能调节L298的 限流电压。LM393的反相端接到L
298的SENSEA和SENSEB两检测端。当检测电阻两端的电压 大于限流电压时,比较器的反相端的电压大于同相端的 电压,输出端输出低电平,从而
第十四讲用AVR单片机定时器1产生PWM波形

第十四讲:用AVR单片机定时器1产生PWM波形实验目的AVR单片机的定时器功能非常强大,除了一般的定时、计数功能外(参见实验十三:用定时器做一个秒表),还具有PWM波形发生,捕获和比较等功能。
本实验演示AVR单片机的定时器产生PWM波形的方法。
我们用BASCOM-AVR的 BASIC 编程,配置定时器1(Timer1)工作在PWM波形产生模式。
BASIC中对定时器的配置非常简单,读者可以对照C语言和汇编语言的程序学习三者间的差别。
难度等级:初级硬件搭建取C型3位跳线将 10K模块接至 PC0 。
三号实验板的0、1引脚分别用B型2位跳线接单片机的PB1 和 PB2脚(即15,16脚,分别是OC1A 和OC1B),公共端接地。
程序代码源程序下载:Timer1_pwm.bas'----------------------------------------------------------------------------------------------------$regfile = "m48def.dat"$crystal = 8000000Config Adc = Single , Prescaler = Auto , Reference = AvccDim Lt As IntegerDim Rt As IntegerDim V As IntegerConfig Timer1 = Pwm , Pwm = 10 , Compare A Pwm = Clear Down ,Compare B Pwm = Clear Up ,Prescale = 64Ddrb = &B00000110Start AdcStart Timer1DoV = Getadc(0)Lt = 1023 - VRt = 1023 - VPwm1a = LtPwm1b = RtLoopEnd ' 指定目标单片机为 ATmega48' 指定系统时钟8兆' 设置ADC为单次转换模式,采样频率系统设定,' 参考电压使用AVcc'''''配置定时器1位PWM波形输出模式'通道A的比较输出模式为降序计数'通到B的比较输出模式为升序计数'定时器时钟由系统时钟提供,分频数为64''配置PB1、PB2引脚输出'启动ADC转换'启动定时器1''取采样'''修改比较寄存器 Ocr1a'修改比较寄存器 Ocr1b程序讲解AVR单片机的定时器功能非常强大,除了最基本的定时和计数外,另一个重要作用是产生多种形式的PWM波形,例如快速PWM波形,相位修正PWM波形和相频修正PWM波形。
如何利用单片机输出PWM波

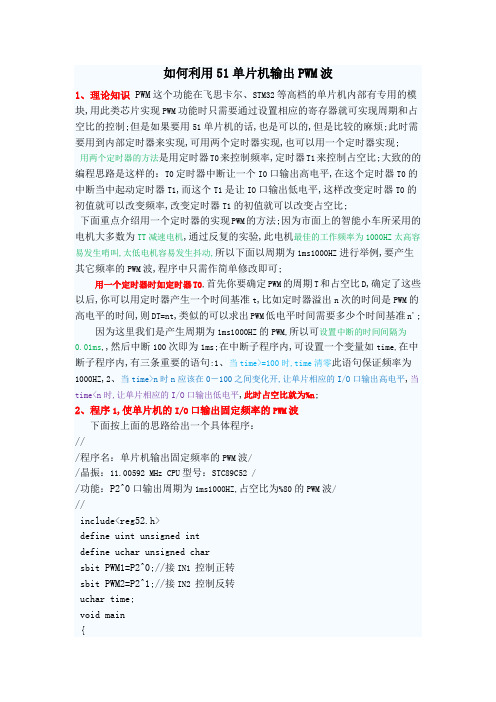
如何利用51单片机输出PWM波1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms(1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间间隔为,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n 时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /*程序名:单片机输出固定频率的PWM波*//*晶振: MHz CPU型号:STC89C52 *//*功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1控制正转sbit PWM2=P2^1;//接IN2控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//EA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//TR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;程序说明:1、关于频率的确定:对于晶振,PWM输出频率为1KHZ,此时设定时器中断一次,时中断次数100次即为1KHZ( *100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
avr单片机的定时器、中断和PWM(转)
/s/blog_4aa25f130100go4v.html转中断:我的理解就是cpu执行时,遇到中断——根据对应的中断源(硬件或软件)——pc定位中断入口地址,然后根据这里的函数指针——跳转到相应的服务程序之所以上面()了硬件或软件,这里还涉及到向量中断和非向量中断:区别就在于确定中断源,如果是硬件编码了中断源的,直接跳转相应的服务函数则是向量中断。
而非向量中断指的是:如果发生中断了,但此时还不清楚是那个中断,需要查找标志位来确定跳转到那个中断区域。
可以发现向量中断肯定来的快些,这里为定时器的中断来做好准备。
再来看看avr单片机的定时器:定时器/计数1(16位)————分为普通模式,CTC模式,快速pwm模式,相位修正pwm模式,相位频率修正pwm模式,输入捕获模式。
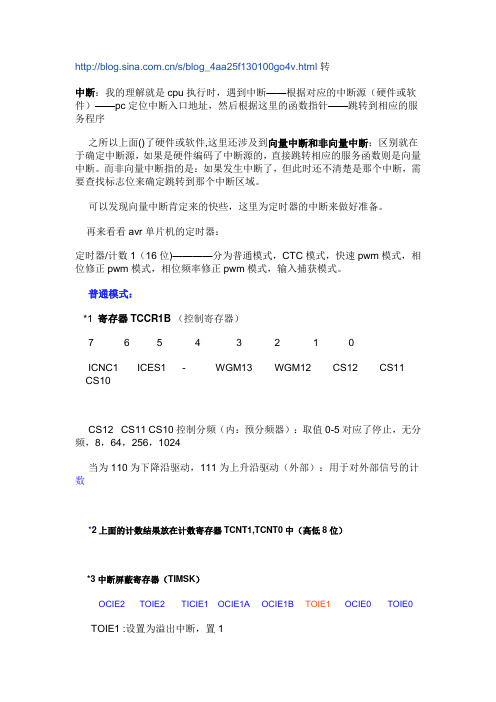
普通模式:*1 寄存器TCCR1B(控制寄存器)7 6 5 4 3 2 1 0ICNC1 ICES1 - WGM13 WGM12 CS12 CS11 CS10CS12 CS11 CS10控制分频(内:预分频器):取值0-5对应了停止,无分频,8,64,256,1024当为110为下降沿驱动,111为上升沿驱动(外部):用于对外部信号的计数*2上面的计数结果放在计数寄存器TCNT1,TCNT0中(高低8位)*3中断屏蔽寄存器(TIMSK)OCIE2 TOIE2 TICIE1 OCIE1A OCIE1B TOIE1OCIE0 TOIE0TOIE1 :设置为溢出中断,置1嘿嘿,有了上面的3个寄存器就可以做秒表等了——思路为:设定控制寄存器(内分频,还是外部计数?)——装初值——设置中断方式(这里用了溢出)——打开中断注意点:装初值时需要先写高位TCNT1,再写低位TCNT0,读时相反TCCR1B=0x01;无分频TCNT1H=0x88;TCNT1L=0x88;TIMSK|=BIT(2); 再开中断SREG|=bit(7); 这样初始化oK!由于avr不像51无int code等之类定义的方法,用的是#pragma data:code 底下为存储的内容写中断也类似:#pragma interrupt_handler (中断函数名:向量号)miao:9(现在该理解向量中断吧)写好申明后就写函数体了void miao(){中断服务程序}这样作为普通用法就小功告成了总结一下就是模式,初值,中断(对应的3个寄存器)和具体C函数的写法CTC模式比较输出模式:用于输出50%占空比的方波信号,用于产生准确的连续定时信号硬件:对应了pd4,pd5输出比较b和a比较输出*1 寄存器TCCR1A(控制寄存器)功能多了寄存器也分a、b了^_^7 6 5 4 3 2 1 0com1A1 COM1A0 com1B1 COM1B0 FOC1A FOC1B W GM11 WGM10用到了4567和01 4、5控制b 6、7控制acom1A(B)1 COM1A(B)0 一般用00和01 WGM11,WGM10放在底下讲0 0 普通i/00 1 比较匹配时输出取反1 0 比较匹配时输出01 1 比较匹配时输出1*2 寄存器TCCR1B(控制寄存器)7 6 5 4 3 2 1 0ICNC1 ICES1 - WGM13 WGM12 CS12 CS11 CS10CS12、CS11、CS10为设置时钟源的WGM13,WGM12,WGM11,WGM10用于波形产生描述的位选择,有对应的表0-15 这里选了4:CTC-OCR1A-立即更新-最大 OCR1A (16位)输出比较寄存器-这里存放了上限值设置的目的是,计数上升到了设定的上限后就电平取反思路:先初始话,对应的复用i/o为输出——设定com1A(B)1,COM1A(B)0 为比较输出取反——设定上限值为ocr1A 就ok了0CR1A可以根据公式计算:具体公式看手册,这里因为我打不起来o(∩_∩)o...哈哈总结一下就是控制寄存器a,b以及上限的值即可产生方波快速PWM分8位9位10位快速pwm,以及自定义方式我的理解:OCR1A存放上限值,这样用上了A的功能,由上面可知A只能为方波了,且计数到这个值时取反下限值通过OCR1B来确定的,从而计数到这个值置0,从而可以发现在一个周期内 OCROB即为高电平的时间(确定占空比)如图TCCR1A=0x63;TCCR1B=0x1B; 工作方式(快速pwm15,64分频)和分频系数OcR1A=1249;OCCR1B=250; 设为100Hz PWM信号,和2毫秒的高电平时间总结一下就是控制寄存器:由上限值,和分频系数可以确定计数的时间,确定频率由下限值可以确定占空比怎么样?明白了吗?o(∩_∩)o...相位修正PWM和快速pwm一样,模式分8位9位10位快速pwm,以及自定义方式共5种对应123和10,11相位修正其实和上面的方法相同,只不过到最大值时,不是取反,而是计数--,直到到了下限时取反由上可以发现2图的区别吧,一个为到TOP后,直接置0,后者为--,且在top 不取反而是到了最小值是取的,周期故而也比快速的长了一倍,故频率为快速pwm的一半,但是占空比不变,这也是为什么叫快速pwm的原因TCCR1A=0x63;TCCR1B=0x13 工作方式(相位修正pwm11,64分频)和分频系数OcR1A=1249;OCCR1B=250; 设为100Hz PWM信号,和2毫秒的高电平时间相位频率修正PWM和相位修正的类似输入捕获。
如何利用单片机输出PWM波
如何利用51单片机输出PWM波1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制;但是如果要用51单片机的话,也是可以的,但是比较的麻烦;此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现;用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比;大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比;下面重点介绍用一个定时器的实现PWM的方法;因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ太高容易发生哨叫,太低电机容易发生抖动,所以下面以周期为1ms1000HZ进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可;用一个定时器时如定时器T0,首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则DT=nt,类似的可以求出PWM低电平时间需要多少个时间基准n';因为这里我们是产生周期为1ms1000HZ的PWM,所以可设置中断的时间间隔为0.01ms,,然后中断100次即为1ms;在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零此语句保证频率为1000HZ,2、当time>n时n应该在0-100之间变化开,让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n;2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:///程序名:单片机输出固定频率的PWM波//晶振:11.00592 MHz CPU型号:STC89C52 //功能:P2^0口输出周期为1ms1000HZ,占空比为%80的PWM波///include<reg52.h>define uint unsigned intdefine uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main{TMOD=0x01;//定时器0工作方式1TH0=0xff;//65536-10/256;//赋初值定时TL0=0xf7;//65536-10%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while1{}}void delayuint z{uint x,y;forx=z;x>0;x--fory=500;y>0;y--;}void tim0 interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//65536-10/256;//赋初值定时TL0=0xf7;//65536-10%256;//0.01msTR0=1;//打开定时器time++;iftime>=100 time=0;//1khziftime<=20 PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振,PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ 0.01ms100=1ms,即为1000HZ此时, 定时器计数器赋初值为TH0=FF,TL0=F7;2、关于占空比的确定:此时我们将来time的值从0-100之间进行改变,就可以将占空比从%0-%100之间进行变化,上面程序中t ime<=20时PWM1=0; else PWM1=1;意思就是%20的时间输出低电平,%80的时间输出高电平,即占空比为%80;如需得到其它占空比,如%60,只需将time的值改为40即可;程序为iftime<=40 PWM1=0;else PWM1=1;当然编写程序时也可以定义一个标志位如flag,根据flag的状态决定输出高平还是低电平,假设定义flag=1的时候输出高电平,用一个变量去记录定时器中断的次数,每次中断就让记录中断次数的变量+1,在中断程序里面判断这个变量的值是否到了n,如果到了说明高电平的时间够了,那么就改变flag为0,输出低电平,同时记录中断变量的值清零,每次中断的时候依旧+1,根据flag=0的情况跳去判断记录变量的值是否到了n'如果到了,说明PWM的低电平时间够了,那么就改flag=1,输出改高电平,同时记录次数变量清零,重新开始,如此循环便可得到你想要的PWM波形,这种方法我们这里不在举例,请自己去试着书写;3、程序2,使用单片机I/O口输出PWM波,并能通过按键控制正反转在程序中我们通常需要控制电机的正反转,如通过一个按键控制正反转,此时我们也可以设置一个标志位如flag;在主程序中当按键每次被按下时,flag相应取反;然后在子程序中当flag为1时,进行正转程序,当flag为0时执行反转程序;下面的程序功能为单片机I/O口P2^0、P2^1输出1000HZ,占空比为%50,并能过P3^7按键控制正电机的正反转;///程序名:PWM直流电机调速//晶振:11.00592 MHz CPU型号:STC89C52 //功能:直流电机的PWM波控制,可以通过按键控制正反转///include<reg52.h>define uint unsigned intdefine uchar unsigned charuchar time,count=50,flag=1;//低电平的占空比sbit PWM1=P2^0;//PWM 通道1,反转脉冲sbit PWM2=P2^1;//PWM 通道2,正转脉冲sbit key_turn=P3^7; //电机换向/函数声明/void delayxmsuint z;void Motor_turnvoid;void timer0_initvoid;/主函数/void mainvoid{timer0_init;while1{Motor_turn;}}/延时处理/void delayxmsuint z//延时xms程序{uint x,y;fory=z;x>0;x--fory=110;y>0;y--;}/电机正反向控制/void Motor_turnvoid{ifkey_turn==0{delayxms2;//此处时间不能太长,否者会的中断产生冲突ifkey_turn==0{flag=~flag;}whilekey_turn;}}/定时器0初始化/void timer0_initvoid{TMOD=0x01; //定时器0工作于方式1TH0=65536-10/256;TL0=65536-10%256;TR0=1;ET0=1;EA=1;}/定时0中断处理/void timer0_intvoid interrupt 1{TR0=0;//设置定时器初值期间,关闭定时器TH0=65536-10/256;TL0=65536-10%256;TR0=1;ifflag==1//电机正转{PWM1=0;time++;iftime<count{PWM2=1;}elsePWM2=0;iftime>=100{time=0;}}else //电机反转{PWM2=0;time++;iftime<count{PWM1=1;}elsePWM1=0;iftime>=100{time=0;}}}4、程序4、使单片机输出PWM,并能控制正反转和实现调速为了使大家彻底掌握此方面,下面再给出一个复杂一点的程序,实现的功能为通过一个按键控制正反转并通过另外两个按键使之可以在0到20级之间调速的程序;///程序名:PWM直流电机调速//晶振:11.00592 MHz CPU型号:STC89C52 //直流电机的PWM波控制,可以通过按键控制正反转并在0到20级之间调速///include<reg52.h>define uint unsigned intdefine uchar unsigned charuchar time,count=50,flag=1;//低电平的占空比sbit PWM1=P2^0;//PWM 通道1,反转脉冲sbit PWM2=P2^1;//PWM 通道2,正转脉冲sbit key_add=P3^5;//电机加速sbit key_dec=P3^6;//电机减速sbit key_turn=P3^7;//电机换向/函数声明/void delayxmsuint z;void Motor_turn;void Motor_add;void Motor_dec;void timer0_init;/主函数/void main{timer0_init;while1{Motor_turn;Motor_add;Motor_dec;}}/延时处理/void delayxmsuint z//延时xms程序{uint x,y;fory=z;x>0;x--fory=110;y>0;y--;}/电机正反向控制/void Motor_turn{ifkey_turn==0{delayxms2;//此处时间不能太长,否者会的中断产生冲突ifkey_turn==0{flag=~flag;}whilekey_turn;}}void Motor_add//电机加速{ifkey_add==0{delayxms2;//此处时间不能太长,否者会的中断产生冲突ifkey_add==0{count+=5;ifcount>=100{count=0;}}whilekey_add;}}void Motor_dec//电机加减速{ifkey_dec==0{delayxms2;//此处时间不能太长,否者会的中断产生冲突ifkey_dec==0{count-=5;ifcount>=100{count=0;}}whilekey_dec;}}/定时器0初始化/void timer0_init{TMOD=0x01; //定时器0工作于方式1TH0=65536-10/256;TL0=65536-10%256;TR0=1;ET0=1;EA=1;}/定时0中断处理/void timer0_int interrupt 1{TR0=0;//设置定时器初值期间,关闭定时器TH0=65536-10/256;TL0=65536-10%256;TR0=1;ifflag==1//电机正转{PWM1=0;time++;iftime<count{PWM2=1;}elsePWM2=0;iftime>=100{time=0;}}else //电机反转{PWM2=0;time++;iftime<count{PWM1=1;}elsePWM1=0;iftime>=100{time=0;}}}5、利用单片机输出PWM简单控制小车直行相信通过上面的讲解,大家已经能够很好的撑握如何利用51单片机产生PWM 波下面给出一个程序,通过单片机两个I/O口输出PWM波,让小车直行;include<reg52.h>define uint unsigned intdefine uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转sbit PWM3=P2^2;//接IN3 控制正转sbit PWM4=P2^3;//接IN4 控制反转sbit PWM5=P2^4;//接IN3 控制正转sbit PWM6=P2^5;//接IN4 控制反转sbit PWM7=P2^6;//接IN3 控制正转sbit PWM8=P2^7;//接IN4 控制反转uchar time;void main{TMOD=0x01;//定时器0工作方式1TH0=0xff;//65536-10/256;//赋初值定时TL0=0xf7;//65536-10%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while1{}}void delayuint z{uint x,y;forx=z;x>0;x--fory=500;y>0;y--;}void tim0 interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//65536-10/256;//赋初值定时TL0=0xf7;//65536-10%256;//0.01msTR0=1;//打开定时器time++;iftime>=100 time=0;//1khzPWM2=0;PWM4=0;iftime<=75 PWM1=1;else PWM1=0;iftime<=80 PWM3=1; else PWM3=0;PWM6=0;PWM8=0;iftime<=50 PWM5=1; else PWM5=0;iftime<=50 PWM7=1; else PWM7=0;}。
AVR 定时器快速PWM模式使用
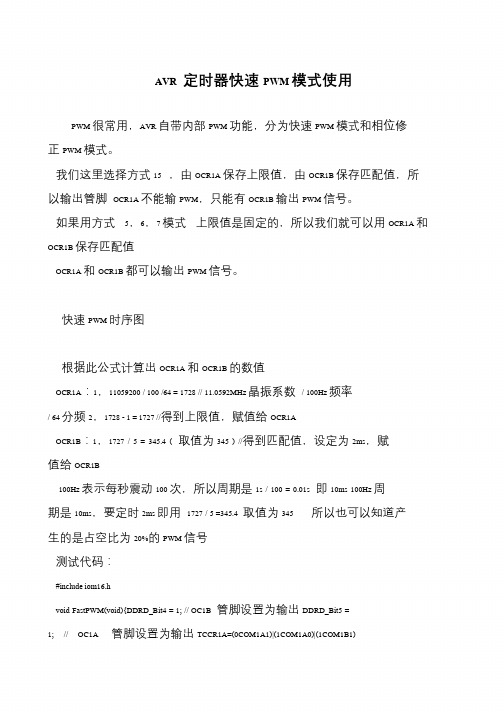
AVR 定时器快速PWM 模式使用
PWM 很常用,AVR 自带内部PWM 功能,分为快速PWM 模式和相位修
正PWM 模式。
我们这里选择方式15 ,由OCR1A 保存上限值,由OCR1B 保存匹配值,所
以输出管脚OCR1A 不能输PWM,只能有OCR1B 输出PWM 信号。
如果用方式5,6,7 模式上限值是固定的,所以我们就可以用OCR1A 和OCR1B 保存匹配值
OCR1A 和OCR1B 都可以输出PWM 信号。
快速PWM 时序图
根据此公式计算出OCR1A 和OCR1B 的数值
OCR1A:1,11059200 / 100 /64 = 1728 // 11.0592MHz 晶振系数/ 100Hz 频率/ 64 分频2,1728 - 1 = 1727 //得到上限值,赋值给OCR1A
OCR1B:1,1727 / 5 = 345.4 ( 取值为345 ) //得到匹配值,设定为2ms,赋值给OCR1B
100Hz 表示每秒震动100 次,所以周期是1s / 100 = 0.01s 即10ms 100Hz 周期是10ms,要定时2ms 即用1727 / 5 =345.4 取值为345 所以也可以知道产生的是占空比为20%的PWM 信号
测试代码:
#include iom16.h
void FastPWM(void){DDRD_Bit4 = 1; // OC1B 管脚设置为输出DDRD_Bit5 = 1; // OC1A 管脚设置为输出TCCR1A=(0COM1A1)|(1COM1A0)|(1COM1B1)。
单片机中PWM输出技术原理与应用

单片机中PWM输出技术原理与应用PWM(Pulse Width Modulation)是一种常见的数字信号调制技术,被广泛应用于单片机中的各种实时控制系统中。
PWM输出技术可以通过控制脉冲信号的占空比来实现对电机、LED灯等外部设备的调节和控制,具有高效、精确、可靠的特点。
本文将介绍PWM输出技术的原理和其在单片机中的应用。
首先,我们来看一下PWM输出技术的原理。
PWM信号是由一个固定频率的方波信号和一个可调节宽度的脉冲信号组成的。
方波信号的频率决定了PWM信号的重复周期,而脉冲信号的宽度(占空比)则决定了PWM信号的平均电平。
通过不断改变脉冲信号的宽度,可以实现对输出信号平均电平的调节。
PWM输出技术的应用非常广泛,其中最常见的应用之一是对电机的调速控制。
通过调节PWM信号的占空比,可以改变电机的平均电压,从而实现对电机转速的控制。
在自动化控制系统中,通过对PWM信号进行精确的调节,可以使电机在不同负载下保持恒定的转速,提高其控制精度和稳定性。
除了电机控制外,PWM输出技术还被广泛应用于LED灯的亮度调节。
由于LED是一种半导体器件,其亮度的控制是通过调节其电流实现的。
而PWM信号通过调节占空比来控制电平平均值,可以间接地控制LED的亮度。
通过快速的开关,PWM信号可以在人眼无法察觉的频率上调节LED的亮度,从而实现高效节能的照明效果。
此外,PWM输出技术还可以应用于音频信号的合成和数字信号的模拟输出等领域。
在音频合成中,通过改变PWM信号的频率和占空比可以模拟出各种不同频率和振幅的波形,从而实现音乐和语音的合成。
在数字信号的模拟输出中,PWM信号可以通过低通滤波器转换为模拟信号,从而实现高精度的数字模拟转换。
在单片机中,PWM输出技术的实现一般依赖于定时器模块。
定时器模块可以生成一个固定频率的方波信号,并实时计数。
通过设置定时器的计数器值和比较器的阈值,可以控制PWM信号的占空比。
当定时器计数器的值小于等于比较器的阈值时,PWM信号为高电平;当定时器计数器的值大于比较器的阈值时,PWM信号为低电平。
单片机指令的PWM信号生成和控制

单片机指令的PWM信号生成和控制PWM(Pulse Width Modulation)脉宽调制技术被广泛应用于单片机控制系统中。
PWM信号的生成与控制对于电机驱动、灯光调节、温度控制以及音频处理等应用起到了重要作用。
本文将重点探讨单片机指令的PWM信号生成和控制的原理、实现方法以及常见应用。
一、PWM信号生成原理PWM信号是一种以方波信号为基础的调制信号,信号的占空比(Duty Cycle)决定了信号的高电平和低电平时间比例。
单片机通过改变占空比来实现对设备的控制。
常见的PWM生成方式有两种:软件生成PWM和硬件生成PWM。
软件生成PWM是通过编程计算电平切换的时间来实现,适合频率较低的应用。
硬件生成PWM则是利用单片机内部的定时器/计数器模块来产生PWM信号,适合频率较高的应用。
二、软件生成PWM信号软件生成PWM信号的关键在于精确计算出高电平和低电平的时间,并进行相应的IO电平切换。
以下是软件生成PWM信号的基本步骤:1. 初始化计时器:选择合适的定时器,并设置计时器的计数模式、计数时间、时钟源等参数。
2. 设置占空比:根据实际需求,计算出高电平和低电平的时间比例,即占空比。
3. 确定周期:根据应用需求,确定PWM信号的周期,即一个完整的方波信号的时间长度。
4. 计算高电平和低电平时间:根据占空比和周期计算出高电平和低电平的时间。
5. 控制IO电平:根据计算得到的时间,控制IO引脚的高电平和低电平。
6. 循环生成PWM信号:根据设定的周期,循环生成PWM信号,以实现对设备的控制。
三、硬件生成PWM信号硬件生成PWM信号利用单片机内部的定时器/计数器模块来产生精确的PWM信号。
硬件生成PWM的好处在于能够减轻CPU的负担,提高系统的实时性和稳定性。
以下是硬件生成PWM信号的基本步骤:1. 选择合适的定时器:根据需求选择适合的定时器,通常定时器/计数器模块都支持PWM信号的生成。
2. 初始化定时器:设置定时器的计数模式、计数时间、时钟源等参数。
avr使用范例--定时器实现pwm功能.doc

AVR使用范例--定时器实现PWM功能本页关键词:什么是pwm pwm原理pwm控制pwm芯片pwm 单片机单片机pwm控制应用pwm电路pwm输出pwm调制脉宽调制PWM是开关型稳压电源中的术语。
这是按稳压的控制方式分类的,除了PWM型,还有PFM型和PWM、PFM混合型。
脉宽宽度调制式(PWM)开关型稳压电路是在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。
通俗的说PWM就是波形,波形的波峰以波谷的比例关系成为占空比,我们可以通过PWM控制电机,音量控制,模拟控制等。
AVR单片机的定时器可以轻松实现PWM功能。
mega16和mega32的timer0是和timer2都具有PWM功能,timer0和timer2都为8位定时器。
timer2为异步操作定时器,在操作过程中要等待寄存器状态更改完成。
详情参看数据手册:8位有pwm操作的异步操作定时器timer2。
下图设定使用timer0来实现PWM功能。
PWM电机控制:。
OC0 output mode 设定了pwm输出控制选择:正常的端口操作,不与OC0 相连接,比较匹配发生时OC0 取反,比较匹配发生时OC0 清零,比较匹配发生时OC0 置位。
Waveform mode设定了波形产生模式:比较匹配输出模式,快速PWM 模式,相位修正PWM 模式。
更详细的内容请参看数据手册。
看看程序代码://ICC-AVR application builder : 2006-11-25 0:15:12// Target : M16// Crystal: 7.3728Mhz#include#includevoid port_init(void){PORTA = 0x00;DDRA = 0x00;DDRB = 0x08; //PB3为PWM输出,非常重要,否则无法输出波形 DDRB = 0x00;PORTC = 0x00; //m103 output onlyDDRC = 0x00;PORTD = 0x00;DDRD = 0x00;}//TIMER0 initialize - prescale:64// WGM: Normal// desired value: 1KHz// actual value: 1.002KHz (0.2%)void timer0_init(void){TCCR0 = 0x00; //stopTCNT0 = 0x8D; //set count /*TCNT0*/OCR0 = 0x73; //set compare /*OCR0*/TCCR0 = 0x23; //start timer /*TCCR0*/}#pragma interrupt_handler timer0_comp_isr:20void timer0_comp_isr(void){//compare occured TCNT0=OCR0#pragma interrupt_handler timer0_ovf_isr:10void timer0_ovf_isr(void){TCNT0 = 0x8D; //reload counter value}//call this routine to initialize all peripherals void init_devices(void){//stop errant interrupts until set upCLI(); //disable all interruptsport_init();timer0_init();MCUCR = 0x00;GICR = 0x00;TIMSK = 0x03; //timer interrupt sources /*TIMSK*/ SEI(); //re-enable interrupts//all peripherals are now initialized}void main(void) /*加上这些,程序就可以运行了。
[AVR汇编例程]AVR单片机用定时器1产生PWM波形实验
![[AVR汇编例程]AVR单片机用定时器1产生PWM波形实验](https://img.taocdn.com/s3/m/4b83133da9114431b90d6c85ec3a87c240288ae6.png)
[AVR汇编例程]AVR单片机用定时器1产生PWM波形实验AVR单片机的定时器功能非常强大,除了一般的定时、计数功能外,还具有PWM波形发生,捕获和比较等功能。
本实验演示AVR单片机的定时器产生PWM波形的方法。
我们配置定时器1(Timer1)工作在10位相位修正PWM波形产生模式。
该程序用AVR- Studio-4 开发,在AVR单片机Atmega48上调试通过。
本实验的详细说明和硬件搭建请参考>>;--------------------------------------------------------------------------------------------------;--------单片机入门实验用定时器1产生PWM波形实验 AVR 汇编程序-----------;--------------------------------------------------------------------------------------------------;作者: 超简单工作室;Email:********************;软件版本: AVR Studio 4.13.571 Service Pack 2;创建日期: 2008.5;版本 V1.00;; Target : M48; Crystal: 8.0000Mhz;*****************************************************.include "m48def.inc".org $0000rjmp _main.org $0020_port_init:; PORTB = 0x00;clr R2out 0x5,R2; DDRB = 0x06;ldi R24,6out 0x4,R24; PORTC = 0x00;out 0x8,R2; DDRC = 0x00;out 0x7,R2; PORTD = 0x00;out 0xb,R2; DDRD = 0x00;out 0xa,R2ret_timer1_init:; TCCR1B = 0x00; //stopclr R2sts 129,R2; TCNT1H = 0xFC; //setupldi R24,252sts 133,R24; TCNT1L = 0x01;ldi R24,1sts 132,R24; TCCR1A = 0xE3;ldi R24,227sts 128,R24; TCCR1B = 0x03; //start Timer ldi R24,3sts 129,R24ret_adc_init:; 设置前,先关闭ADCclr R2sts 122,R2; 选择内部AVCC为基准ldi R24,64sts 124,R24; 关闭模拟比较器ldi R24,128out 0x30,R24; 使能ADC,启动ADC单次转换,选64分频ldi R24,198sts 122,R24ret_adc_get:; 启动ADC转换lds R24,122ori R24,64sts 122,R24L5:lds R2,122sbrc R2,6rjmp L5lds R16,120lds R17,120+1ret_main:rcall _port_initrcall _timer1_initrcall _adc_initL9:; adc_v = adc_get(); //ADC转换rcall _adc_get; lt = 1023 - adc_v;ldi R24,0xffldi R25,3movw R12,R24sub R12,R16sbc R13,R17; rt = 1023 - adc_v;sub R24,R16sbc R25,R17movw R10,R24;; OCR1A = lt;sts 136+1,R13sts 136,R12; OCR1B = rt;sts 138+1,R11sts 138,R10rjmp L9ret。
AVR单片机定时器使用总结TC0

A VR单片机定时器使用总结T0一、普通模式:普通模式(WGM01:0 = 0) 为最简单的工作模式。
在此模式下计数器不停地累加。
计到8比特的最大值后(TOP = 0xFF),由于数值溢出计数器简单地返回到最小值0x00 重新开始。
在TCNT0 为零的同一个定时器时钟里T/C 溢出标志TOV0 置位。
此时TOV0 有点象第9 位,只是只能置位,不会清零。
但由于定时器中断服务程序能够自动清零TOV0,因此可以通过软件提高定时器的分辨率。
在普通模式下没有什么需要特殊考虑的,用户可以随时写入新的计数器数值。
输出比较单元可以用来产生中断。
但是不推荐在普通模式下利用输出比较来产生波形,因为这会占用太多的CPU 时间。
TCCR0:`该模式一般用来定时中断。
使用步骤:1、计算确定TCNT0初值;2、设工作方式,置初值;3、开中断;二、CTC( 比较匹配时清零定时器)模式在CTC 模式(WGM01:0 = 2) 下OCR0 寄存器用于调节计数器的分辨率。
当计数器的数值TCNT0等于OCR0时计数器清零。
OCR0定义了计数TOP值,亦即计数器的分辨率。
这个模式使得用户可以很容易地控制比较匹配输出的频率,也简化了外部事件计数的操作。
CTC模式的时序图为Figure 31。
计数器数值TCNT0一直累加到TCNT0与OCR0匹配,然后TCNT0 清零。
利用OCF0 标志可以在计数器数值达到TOP 时产生中断。
在中断服务程序里可以更新TOP的数值。
由于CTC模式没有双缓冲功能,在计数器以无预分频器或很低的预分频器工作的时候将TOP 更改为接近BOTTOM 的数值时要小心。
如果写入的OCR0 数值小于当前TCNT0 的数值,计数器将丢失一次比较匹配。
在下一次比较匹配发生之前,计数器不得不先计数到最大值0xFF,然后再从0x00 开始计数到OCF0。
为了在CTC 模式下得到波形输出,可以设置OC0 在每次比较匹配发生时改变逻辑电平。
实验九:定时器输出PWM模拟DAC

Editor:*轩辕十四*
Created date:2010-2-9
-4-
华南理工大学无线电爱好者协会
AVR-R&D
V2.1
QQ 群:63191815
for(i=0;i<4;i++) { SMG0_L;SMG1_L;SMG2_L;SMG3_L; // 关闭所有位选 switch(i) { case 0: // 取出 data 的千位的数字,并位选 { num=data/1000; SMG0_H; }break; case 1: // 取出百位 { num=data/100%10; SMG1_H; }break; case 2: // 取出十位 { num=data/10%10; SMG2_H; }break; case 3: // 取出个位 { num=data%10; SMG3_H; }break; default:break; } num=table[num]; if(!i)num++; // 添加千位的小数点 for(temp=0;temp<8;temp++) // 共移入 8 位数据,恰好驱动数码管 { if(num&(1<<temp)) // num 对应字模,temp 对应第 temp 位 SER_H; // 根据字模的 1 置位数据端 else SER_L; // 字模的 0 置零数据端 SCK_H; SCK_L; // 高电平脉冲,上升沿数据移入 } RCK_H; RCK_L; // 高电平脉冲,数据输出 OE_L; // 使能输出端口 delay_ms(1);// 显示时间 2ms OE_H; // 关闭显示,如果不关闭,显示数码间有"重影" } } // ADC 初始化 void ADC_Init() { ADMUX =0x40; // AVCC 参考、右对齐、ADC0 通道 ADCSRA=0xC6; // 使能 ADC、单次模式、启动第一次、12MHz 内部时钟 64 分频 while(ADCSRA & (1<<ADSC)); // 等待采样结束,第一次转换 } // 启动一次采样,获取 ADC 数据 unsigned int get_ad_data(unsigned char AD_CH) { ADMUX=(0xC0|AD_CH); // 配置通道 ADCSRA|=1<<ADSC; // 启动一次转换
单片机PWM输出原理与应用实现
单片机PWM输出原理与应用实现一、引言在嵌入式系统中,单片机是最常用的控制核心之一。
其中,脉冲宽度调制(PWM)输出是单片机中常见且重要的功能之一。
本文将介绍单片机PWM输出的原理及其在实际应用中的实现方法。
二、单片机PWM输出原理1. PWM基本原理脉冲宽度调制是一种通过改变信号的占空比来控制电平的方法。
PWM信号周期性地以高电平和低电平交替出现,其中高电平持续时间称为脉冲宽度。
通过调整脉冲宽度和周期的比例,可以改变信号的平均电平值。
在单片机中,PWM输出一般是通过定时器模块来实现的。
2. 定时器模块定时器是单片机中用于计时和产生脉冲的重要外设。
在PWM输出中,常用的定时器模块有通用定时器(如AVR单片机的Timer/Counter)和专用定时器(如ATmega16中的PWM模块)。
定时器通常由一个计数器和若干个比较器组成。
计数器用于计数,比较器用于比较计数器的值与预设值。
3. 实现PWM输出实现PWM输出的基本步骤如下:(1)选择合适的定时器模块,并进行配置。
配置包括设置计数器的工作模式、预设比较器的值和选择计时器的时钟源等。
(2)设置占空比。
占空比是指高电平时间与周期之比,通常以百分比表示。
设置占空比可以通过改变比较器的值来实现。
(3)启动定时器,开始输出PWM信号。
定时器将按照预设的比较器值周期性地产生PWM波形。
三、单片机PWM输出应用实现1. LED亮度控制单片机的PWM输出可以用于控制LED的亮度。
以基于AVR单片机的PWM 功能为例,以下是实现LED亮度控制的基本步骤:(1)选择一个可用的数字输出引脚,配置为PWM输出模式。
(2)设置定时器的工作模式为PWM模式,并设置预设比较器的值以控制占空比。
(3)在主循环中改变比较器的值,从而改变LED的亮度。
2. 电机速度控制PWM输出还可以用于控制电机的转速。
以下是基于单片机的电机速度控制的基本步骤:(1)选择一个可用的数字输出引脚,配置为PWM输出模式。
基于AVR单片机的直流电动机的PWM调速系统设计

照型亟遮i±盛墨匣测(数据记录的时间点是一致的,采样周期均为20rain)。
其中一组测试的极化电阻和腐蚀速率数据如图3、图4所示。
图2一个工作周期流程由图可见,实验初期,由于电极表面粗糙度大,腐蚀电流密度较大,极化电阻比较小,循环水当中的金属腐蚀情况也不稳定。
随着时间推移,在金属表面形成氧化膜,腐蚀速率下降,极化电阻趋仪器仪表用户于平稳,表明金属腐蚀也趋于平稳;但随着氧化膜被破坏,腐蚀速率还会上升。
自动监测和电位仪测得的两个重要参数的基本趋势是相吻合的,总体误差不超过10%。
分析引起误差的原因,归结为以下几个方面:(1)恒电位仪测量时,由于显示数据的不稳定,造成人为读数上的误差,从而计算结果可能不能表征金属腐蚀的真实状态:(2)电压电流转换电路有零漂现象,模拟量采集卡所采集的信号与真实值有偏差;(3)电流信号偏小,易受外界的干扰。
5结论本监测系统原理简单明了,测量速度快。
测量精度高,性能稳定;实现了金属腐蚀速率的自动在线测量:实用性强,将本系统用于应用于工业现场中,操作人员便可根据测量结果调整缓蚀剂的加药量。
国参考文献【l】l张守本.金属腐蚀探测.铀矿地质.2003,19(2):114-118【2】曹楚南.腐蚀电化学[M1.北京:化学工业出版社,1994.[3】冯业铭,耿小兰,郑立群等.弱极化法腐蚀速度测试仪的研制.传感器技术,1999,18(5):38—40【4】蒯晓明,郑立群,李瑛,等.智能腐蚀电流测量仪的研制.腐蚀科学与防护技术,1995,7(2):162-166作者简介:孙灵芳(1970-),男.东北电力学院自动化工程学院副教授,硕士生导师:张苗苗(1981一),女,在读硕士研究生.研究方向:新型控制策略和监测手段的应用。
文章编号:1671-1041(2006)02-0042-02基于AVR单片机的直流电动机的PWM调速系统设计姜长泓,于万元,王冬蕾(长春工业大学电气与电子工程学院,长春130012)摘要:本文介绍用AVR单片机实现直流电动机的PWM调速的方法。
单片机的PWM输出原理与应用

单片机的PWM输出原理与应用在单片机技术中,脉冲宽度调制(Pulse Width Modulation,PWM)是一种常见的数字信号调制技术。
PWM信号通过控制信号的高电平和低电平的时间比例,模拟出连续电平的变化,具有精确控制电平的特点。
本文将介绍单片机的PWM输出原理及其应用。
一、PWM输出原理单片机的PWM输出原理基于时间控制。
其基本思想是通过调整高电平和低电平之间的时间比例,实现对输出电平的控制。
单片机的PWM输出可以通过特定的寄存器进行配置。
以下是PWM输出的工作原理。
1. 设置定时器:通过单片机的定时器,设置一个固定的计数周期。
计数周期内的计数次数根据所需的PWM信号频率和单片机的时钟频率决定。
2. 输出比例设定:设置一个比较寄存器,该寄存器的值决定了高电平的持续时间。
将此值与定时器的计数值进行比较,当两者相等时,PWM信号的输出电平变为低电平。
3. 输出电平控制:在定时器计数过程中,当计数值小于比较寄存器的值时,输出信号的电平为高电平;当计数值大于等于比较寄存器的值时,输出信号的电平为低电平。
通过调整比较寄存器的值,可以控制高电平和低电平的时间比例,从而改变PWM输出的占空比。
占空比是高电平时间与一个完整周期的比例,可用于控制输出电平。
二、PWM输出应用PWM输出在单片机应用中有广泛的用途,以下列举了几个常见的应用领域。
1. 电机控制:PWM输出可用于直流电机的速度调节。
通过改变PWM信号的占空比,可以改变电机的转速。
占空比增大,则电机转速增加;占空比减小,则电机转速减小。
2. LED亮度控制:PWM输出可以实现LED的亮度调节。
改变PWM信号的占空比,可以改变LED的亮度。
占空比增大,则LED亮度增加;占空比减小,则LED亮度减小。
3. 温度控制:PWM输出可以用于温度控制系统中的电热器控制。
通过改变PWM信号的占空比,可以调节电热器工作时间比例,从而控制温度。
4. 音频处理:PWM输出可以实现音频信号的数字调制。
单片机PWM原理及方案选择指南
单片机PWM原理及方案选择指南引言脉冲宽度调制(PWM)是一种常用的数字信号调制技术,常被应用于单片机控制中。
本文将介绍PWM的原理和其在单片机控制中的应用,并提供一个方案选择指南,帮助读者根据不同需求选择适合的单片机PWM方案。
一、PWM原理1. 什么是PWM?PWM是一种模拟信号的数字调制技术,通过改变脉冲的宽度,实现对模拟信号的控制。
在PWM信号中,脉冲的宽度代表了模拟信号的幅度。
因为单片机只能输出数字信号,通过PWM技术,我们可以模拟出连续的模拟信号。
2. PWM的工作原理PWM信号是由周期固定的脉冲组成的,周期由频率决定。
脉冲的宽度决定了信号的幅度。
通常情况下,脉冲宽度是可调的,通过改变脉冲宽度,可以实现对模拟信号的控制。
3. PWM的应用PWM广泛应用于电机控制、照明调光、音频放大和通信系统等领域。
在单片机控制中,PWM常被用于控制电机的速度和位置,调光灯的亮度以及产生音频信号等。
二、PWM方案选择指南1. 选择合适的单片机在选择PWM方案之前,我们首先需要选择合适的单片机。
以下是一些考虑因素:1)PWM输出通道数量:根据实际需求,选择具备足够PWM输出通道的单片机。
通常情况下,单片机的产品手册或数据表会明确列出其PWM输出通道的数量。
2)PWM分辨率:PWM的分辨率是指能够生成的不同占空比的数量。
分辨率越高,输出的模拟信号越精确。
单片机的PWM分辨率通常由其工作频率和定时器的位数决定。
3)电源电压和电流:根据实际应用的电源要求,选择合适的单片机工作电压范围和电流。
4)功能需求:根据具体需求,选择具备适当功能特性的单片机,如定时器、比较器、ADC/DAC等。
这些功能可以进一步优化PWM的应用。
2. 设计PWM方案选择了合适的单片机后,我们需要设计PWM方案。
以下是一些建议和注意事项:1)确定PWM频率:PWM频率通常是固定的,并且需要根据具体应用进行选择。
较低的频率可能导致马达噪音或闪烁的灯光,而较高的频率可能会引起电磁干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、定时/计数器PWM设计要点
根据PWM的特点,在使用ATmega128的定时/计数器设计输出PWM时应注意以下几点:
1.首先应根据实际的情况,确定需要输出的PWM频率范围,这个频率与控制的对象有关。
如输出PWM波用于控制灯的亮度,由于人眼不能分辨42Hz以上的频率,所以PWM 的频率应高于42Hz,否则人眼会察觉到灯的闪烁。
2.然后根据需要PWM的频率范围确定ATmega128定时/计数器的PWM工作方式。
AVR 定时/计数器的PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
3.快速PWM可以的到比较高频率的PWM输出,但占空比的调节精度稍微差一些。
此时计数器仅工作在单程正向计数方式,计数器的上限值决定PWM的频率,而比较匹配寄存器的值决定了占空比的大小。
PWM频率的计算公式为:
PWM频率 = 系统时钟频率/(分频系数*(1+计数器上限值))
4.快速PWM模式适合要求输出PWM频率较高,但频率固定,占空比调节精度要求不高的应用。
5.频率(相位)调整PWM模式的占空比调节精度高,但输出频率比较低,因为此时计数器仅工作在双向计数方式。
同样计数器的上限值决定了PWM的频率,比较匹配寄存器的值决定了占空比的大小。
PWM频率的计算公式为:
PWM频率 = 系统时钟频率/(分频系数*2*计数器上限值))
6.相位调整PWM模式适合要求输出PWM频率较低,但频率固定,占空比调节精度要求高的应用。
当调整占空比时,PWM的相位也相应的跟着变化(Phase Correct)。
7.频率和相位调整PWM模式适合要求输出PWM频率较低,输出频率需要变化,占空比调节精度要求高的应用。
此时应注意:不仅调整占空比时,PWM的相位会相应的跟着变化;而一但改变计数器上限值,即改变PWM的输出频率时,会使PWM的占空比和相位都相应的跟着变化(Phase And Frequency Correct)。
8.在PWM方式中,计数器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。
或由用户设定的0x0000-0xFFFF,设定值在16位T/C的ICP或OCRA寄存器中。
而比较匹配寄存器的值与计数器上限值之比即为占空比。
二、 PWM应用参考设计
下面给出一个设计示例,在示例中使用PWM方式来产生一个1KHz左右的正弦波,幅度为0-Vcc/2。
首先按照下面的公式建立一个正弦波样本表,样本表将一个正弦波周期分为128个点,每点按7位量化(127对应最高幅值Vcc/2):
F(X) = 64 + 63 * Sin(2πx/180) X∈[0…127]
如果在一个正弦波周期中采用128个样点,那么对应1KHz的正弦波PWM的频率为128KHz。
实际上,按照采样频率至少为信号频率的2倍的取样定理来计算,PWM的频率的理论值为2KHz即可。
考虑尽量提高PWM的输出精度,实际设计使用PWM的频率为16KHz,即一个正弦波周期(1KHz)中输出16个正弦波样本值。
这意味着在128点的正弦波样本表中,每隔8点取出一点作为PWM的输出。
程序中使用ATmega128的8位T/C0,工作模式为相位调整PWM模式输出,系统时钟为8MHz,分频系数为1,其可以产生最高PWM频率为: 8000000Hz / 510 = 15686Hz。
每16次输出构成一个周期正弦波,正弦波的频率为。
PWM由OC0(PB4)引脚输出。
参考程序如下(ICCAVR)。
//ICC-AVR Application Builder : 2004-08
// Target : M128
// Crystal:
#Include
#Include
#Pragma Data:code
// 128点正弦波样本表
Const Unsigned Char Auc_SinParam[128] = {
64,67,70,73,76,79,82,85,88,91,94,96,99,102,104,106,109,111,113,115,117,118,120 ,121,
123,124,125,126,126,127,127,127,127,127,127,127,126,126,125,124,123,121,120,11 8,
117,115,113,111,109,106,104,102,99,96,94,91,88,85,82,79,76,73,70,67,64,60,57,5 4,51,48,
45,42,39,36,33,31,28,25,23,21,18,16,14,12,10,9,7,6,4,3,2,1,1,0,0,0,0,0,0,0,1,1 ,2,3,4,6,
7,9,10,12,14,16,18,21,23,25,28,31,33,36,39,42,45,48,51,54,57,60};
#Pragma Data:data
Unsigned Char X_SW = 8,X_LUT = 0;
#Pragma Interrupt_handler Timer0_ovf_isr:17
Void Timer0_ovf_isr(Void)
{
X_LUT += X_SW; // 新样点指针
If (X_LUT > 127) X_LUT -= 128; // 样点指针调整
OCR0 = Auc_SinParam[X_LUT]; // 取样点指针到比较匹配寄存器}
Void Main(Void)
{
DDRB |= 0x10; // PB4(OC0)输出
TCCR0 = 0x71; // 相位调整PWM模式,分频系数=1,正向控制OC0
TIMSK = 0x01; // T/C0溢出中断允许
SEI(); // 使能全局中断
While(1)
{……};
}
每次计数器溢出中断的服务中取出一个正弦波的样点值到比较匹配寄存器中,用于调整下一个PWM的脉冲宽度,这样在PB4引脚上输出了按正弦波调制的PWM方波。
当PB4
的输出通过一个低通滤波器后,便得到一个的正弦波了。
如要得到更精确的1KHz的正弦波,可使用定时/计数器T/C1,选择工作模式10,设置ICR1=250为计数器的上限值。