saber与matlab的比较
电气控制模拟仿真新工具-PLECS工具箱
提纲引言 (1)绪论 (1)PLECS工具箱 (4)优势 (6)应用领域 (7)客户 (8)竞争产品 (9)使用许可 (10)升级维护 (11)交货 (12)未来产品 (13)引言电气系统的仿真通常采用MATLAB或者SPICE软件,但他们都有各自的缺点。
PLECS是一个运行于Sinmlink环境下的工具箱,适用于电气系统的仿真。
当被仿真的系统既含有电路部分,又含有复杂的控制技术方案时,PLECS提供了一个简便的仿真手段。
随着科学技术、仿貞•理论及汁算机的不断发展,仿頁•技术在不断的提髙,在如今的科学研究中,仿真技术大大提高了科学研究水平,缩短了科学研究周期、降低了科学研究成本及风险、促进了各不同领域学科间的融合、加速了科研成果转化为生产力。
现在,越来越多的技术人员采用计算机来对电气系统来进行仿真。
当前适用于电气系统的仿真软件广义上可以分为两大类:电路仿真软件和系统仿真软件。
电路仿真软件以SPICE和SABER为代表。
当技术人员使用这类仿真软件来对电气系统进行仿真时,必须在仿真环境中描述各个电气元件和各个元件之间的电气连接。
对此,人们通常采用网络表(net list)来描述电气系统,或者在仿真软件中绘制电路图来描述电气系统。
仿貞•软件将以等效的数学模型对电路进行仿真。
虽然使用这类软件可以很方便地对只包含电子电路的电气系统进行仿真,但是这类软件不适用于仿真含有复杂控制结构的电气系统。
系统仿真软件以MATLAB为代表。
它在科学研究特别是电子信息科学中有着极为广泛的应用。
它的典型使用包括:(1)数学和计算;⑵运算法则:(3)建模、仿真;⑷ 数据分析、研究等等。
它的特点在于其强大的矩阵计算能力和丰富的工具箱。
使用系统仿真软件时,电气系统必须采用相应的微分方程或代数方程来描述。
当已知系统的传递函数时,使用系统仿真软件进行仿貞•是十分方便的。
但是当被仿貞•的系统含有电路部分,仿真就变得十分困难。
因为如果电路部分以简化的传递函数来表示,则很多细节会被忽略。
电力电子电路仿真软件综述
电力电子电路仿真软件综述作者:乔峥来源:《无线互联科技》2014年第09期摘要:随着计算机软件技术的不断发展,电力电子电路仿真软件也不断的更新换代,本文着重介绍OrCAD PSpice、saber、PLECS、CASPOC、Matlab 五种常见的电力电子仿真软件的主要功能和缺点,便于使用者选择合适的软件进行电力电子电路仿真分析和设计。
关键词:电力电子技术;仿真软件;主要功能;缺点随着计算机技术的不断发展,越来越多的电力电子仿真软件为电气工作者提供了极大的便利,本文着重介绍五种常见的电力电子仿真软件,便于使用者根据实际需要选择合适的软件进行电路仿真分析和设计。
1 OrCAD PSpice仿真软件PSpice属于元件级仿真软件,模型采用spice通用语言编写,移植性强,常用的信息电子电路,是它最适合的场合。
现在使用较多的是 PSpice 10.5,整个软件由原理图编辑、电路仿真、激励编辑、元器件库编辑、波形图等几个部分组成,使用时是一个整体。
PSpice 的电路元件模型反映实际型号元件的特性,通过对电路方程运算求解,能够仿真电路的细节,特别适合于对电力电子电路中开关暂态过程的描述。
该软件的主要功能有:(1)复杂的电路特性分析,如:蒙特卡罗分析。
(2)模拟、数字、数模混合电路仿真。
(3)集成度提高。
该软件的缺点有:(1)不适用于大功率器件。
(2)采用变步长算法,导致计算时间的延长。
(3)仿真的收敛性较差。
2 Saber仿真软件Saber仿真软件被誉为全球最先进的系统仿真软件,也是唯一的多技术、多领域的系统仿真产品,可用于电子、电力电子、机电一体化、机械、光电、光学、控制等不同类型系统构成的混合系统仿真,这也是saber的最大特点。
Saber是混合仿真系统,可以兼容模拟、数字、控制量的混合仿真,便于在不同层面分析和解决问题,其他仿真软件不具备这样的功能。
Saber的仿真真实性很好,从仿真的电路到实际的电路实现,参数基本不用修改。
各种EDA软件对比
MATLAB是美国MathWorks企业出品旳商业数学软件,用于算法 开发、数据可视化、数据分析以及数值计算旳高级技术计算语 言和交互式环境,主要涉及MATLAB和Simulink两大部分。
它们旳一大特征是有众多旳面对详细应用旳工具箱和仿真块, 涉及了完整旳函数集用来对图像信号处理、控制系统设计、神 经网络等特殊应用进行分析和设计。它具有数据采集、报告生 成和MATLAB语言编程产生独立C/C++代码等功能。MATLAB产品 族具有下列功能:数据分析;数值和符号计算、工程与科学绘 图;控制系统设计;数字图像信号处理;财务工程;建模、仿 真、原型开发;应用开发;图形顾客界面设计等。MATLAB产品 族被广泛应用于信号与图像处理、控制系统设计、通讯系统仿 真等诸多领域。开放式旳构造使MATLAB产品族很轻易针对特定 旳需求进行扩充,从而在不断深化对问题旳认识同步,提升本 身旳竞争力。
PSPICE软件具有强大旳电路图绘制功能、电路模拟仿真功能、 图形后处理功能和元器件符号制作功能,以图形方式输入,自 动进行电路检验,生成图表,模拟和计算电路。它旳用途非常 广泛,不但能够用于电路分析和优化设计,还可用于电子线路、 电路和信号与系统等课程旳计算机辅助教学。与印制版设计软 件配合使用,还可实现电子设计自动化。被公认是通用电路模 拟程序中最优异旳软件,具有广阔旳应用前景。这些特点使得 PSPICE受到广大电子设计工作者、科研人员和高校师生旳热烈 欢迎,国内许多高校已将其列入电子类本科生和硕士生旳辅修 课程。
Pspice AA 涉及蒙特卡洛分析、电应力分析、参 数测绘仪、优化分析
经过了AD分析之后旳电路,基本上能够满足我 们旳性能指标要求,当电路经过AA分析之后, 电路旳性能指标基本上能够满足制造生产旳需 求,不会出现成品率太差或者工作不安全等情 况。
Saber和Matlab在IGBT动态特性仿真中的应用研究
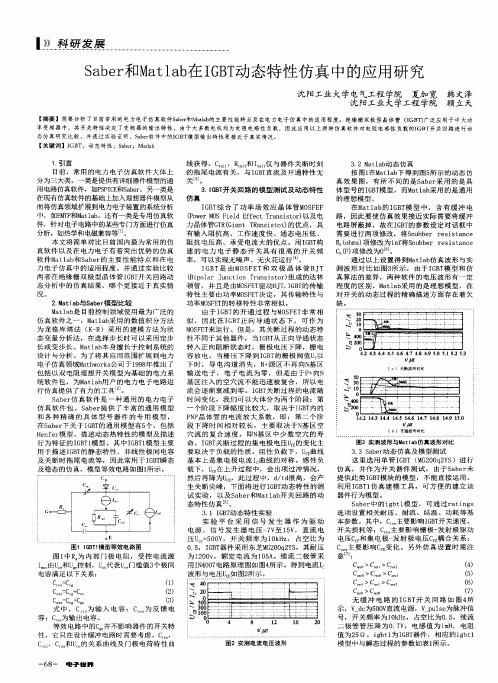
图1 I G B T 1 模 型 等 效 电 路 图
图1 中R 为 内 部 门极 电 阻 , 受 控 电流 源 I 由u 。 和u 控 制 ,u 。 代表u 。 门槛值3 个 极 间 电 容满 足 以 下关 系 : C = C ( 1 )
顿管 ,并且是由M O S F E T 驱 动B J T . I G B T 的传 输 特性主要 由功率M O S F E T 决 定 , 其 传 输 特 性 与 功率M O S F E T 的转 移 特 性 非 常 相 似 。 由于I G B T 的 开 通 过 程 与M O s F E T 非 常 相 似 , 因此在 I G B T 正 向 导 通 状 态 下 , 可 作 为 M O S F E T 来 运 行 。但 是 , 其 关 断 过 程 的动 态 特 性不 同于其他器件 ,当I G B T 从 正 向导 通 状 态 转 入 正 向 阻 断 状 态 时 , 栅 极 电压 下 降 ,栅 电 容 放 电 。 当栅 压 下 降 到 I G B T 的栅 极 阀 值 u 以 下 时 , 导 电沟 道 消 失 , N 十 源 区不再 向N 基 区 输 送 电子 , 电子 电流 为 零 ,但 是 由 于 P + 向N 基 区 注 入 的 空 穴 流 不 能 迅 速 被 复 合 , 所 以 电 流会 逐渐衰减到零 。I G B T 关 断 过 程 的 电 流 随 时 问 变 化 ,我 们 可 以 大 体 分 为 两 个 阶 段 : 第 个 阶 段 下 降幅 度 比 较 大 , 取 决 于 I G B T 内 的 P N P 晶 体 管 的 电流 放 大 系 数 , 即 : 第 二 个 阶 段 下 降时间相 对较长 ,主要 取决 于N 基 区 空 穴流 的复合速 度 ,N O N 基 区 中 少 数 空 穴 的 寿 命 。I G B T 关 断 过 程 的集 电 极 电压 u 的 变 化 主 要 取 决 于 负 载 的性 质 。 阻 性 负 载 下 ,u 曲线 基 本 上 是 集 电 极 电流 I 曲 线 的 对 称 。 感 性 负 载 下 ,u 在 上 升 过 程 中 ,会 出 项 过 冲 情 况 , 然后再降为u 此过程 中,d / t d 很 高 ,会 产 生关断尖 峰,下面将进行 I G B T 动 态 特 性 的 测 试 实 验 , 以及 S a b e r  ̄M a t l a b 开 关 回 路 的 动 态特性仿真。 。 。 3 . 1 I G B T 动 态 特 性 实 验 实 验 平 台 采 用 信 号 发 生 器 作 为 驱 动 电源 ,信 号 发 生 器 电 压 - T V 至l 5 v , 直 流 电 压U = 5 0 0 V,开 关 频 率 为 l O k H z , 占 空 比为 0 . 5 ,I G B T 器件采用东芝M G 2 0 0 q 2 Y S ,其 耐 压 为1 2 0 0 v ,额 定电流为 1 0 5 A 。续流 二极管采 用I N 4 0 0 7 电路 原 理 图如 图4 所 示 。得 到 电流 I 波 形 与 电压 u 如 图2 所示 。 ; l
saber与控制系统仿真
SABER与控制系统仿真1.应用背景1.1为什么要使用控制系统仿真对于SABER强大的电路仿真功能我们已经有所了解,在模块电路中,我们的反馈控制方法通常比较简单,一般就是一些电阻和电容的组合,但是对更为复杂的控制模式,控制参数的定义难以用模拟电路组合实现,指标间的对应关系也不直观,应用控制系统仿真,便于直观理解以便优化指标,便于转化到数字实现(DSP),而且可以实现一些复杂的控制方式(例如三相系统中常用的静止和旋转的坐标变换)1.2SABER在控制系统仿真的优势和制约优势:SABER作为混合仿真系统,可以兼容模拟,数字,控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
制约:不支持离散系统的频域分析,以及状态方程的分析方法。
1.3控制系统仿真应用范围主要应用在变频器,UPS,以及未来的数字化电源系统的控制算法设计部分。
2.基本方法2.1控制流原则在控制系统仿真中用到的模型有两个特点:1、它们都是无量纲的数值,不论电流,电压,速度,角度,在进行控制系统仿真之前都必须转化为无量纲的数字,因为对于控制处理机构而言,它只关心分析对象的数学行为,这是为了进行统一的分析。
2、信号流向是单相的,必须从一个模型的输出(out)口流入到另外一个模型的输入端口,不能颠倒。
而模拟电路器件的端口是不区分类别的,信号可以从断口流出也可以流入,只有正负号不同。
为了解释这个问题,我们看一个例子如下。
上图中左边和右边分别是一个RC并联电路在电路仿真和控制系统仿真中的描述,在控制系统中用一个积分环节表示电容,对于电路中的电容模型,我们可以以电压或者电流任何一个作为输入量求解另外一个,而在控制系统一旦确定模型方式,输入量就唯一确定,在该例子中选用积分环节,则输入只能是电流才能够描述电容行为,输入如果是电压量,则描述的就是一个电感了。
这也说明控制系统的模型具有普遍的应用性。
2.2基本模型类别首先我们以一个例子来看看控制系统中常用的有哪些模型:这是一个双环控制的半桥PFC的控制模型仿真图,图中用虚线框住的部分为主电路等效,下面部分为控制电路等效。
基于saber软件开关电路的仿真

基于saber软件开关电路的仿真【摘要】电力电子系统的计算机仿真已经成为其产品设计研发过程中一个很重要的环节,MATLAB和SABER是目前使用最多的电力电子仿真软件。
与MATLAB相比SABER由其较为突出的优点软件相比其仿真速度快、收敛性好、仿真结果的准确性高。
本文使用电力电子仿真软件SABER对移相全桥DC/DC 变换器与零电压转换器进行了分析和验证。
【关键词】saber仿真;移相全桥DC/DC变换器一、引言SABER作为混合仿真系统,可以兼容模拟,数字,控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
Saber软件主要用于外围电路的仿真模拟,包括SaberSketch、SaberDesigner两部分。
SaberSketch用于绘制电路图,而Saber-Designer用于对电路仿真模拟,模拟结果可在SaberScope和DesignProbe中查看[5][6]。
由于移相全桥DC/DC变换器具有鲜明的特点,最近在大功率多电飞机电源系统中备受关注。
所谓的多电飞机是指提高使用电力同时将液压和气动的使用降到最低。
这种改变使多电飞机比传统的飞机有明显的优势。
由于多电飞机对电力的要求增加,它就需要一个更适合的配电和转换系统,因此电力电子在其中的分量不断增加[1][2]。
移相全桥DC/DC变换器可以为飞机提供电源,这种类型的转换器拓扑允许所有的开关设备在零电压开关下进行操作,并且大大减小了开关损耗。
此外它能高频率的操作开关来提高功率密度,从而降低了转换器的尺寸[3][4]。
二、移相全桥移DC/DC变换器相全桥DC/DC变换器是一种典型的零电压开关转换器,其基于全桥隔离变压器模块的转换器。
基本为:全桥开关网络、高频变压器、整流和LC滤波器。
互感LS也显示在图表中。
这个电感通常包括变压器漏感和附加分离原件的电感,并且和变压器是串联的。
C1-C4是瞬间关断电容,可以和LS一起实现零电压开关转换。
Matlab简介

Matlab简介Matlab简介1980年,美国CleveMoier博⼠在新墨西哥⼤学讲课时,认为⾼级语⾔的运⽤⼗分不便,于是创⽴了Matlab(MatrixLaboratory 的缩写),即矩阵实验室,早期的Matlab 软件是为了帮助⽼师和学⽣更好地学习,是作为⼀个辅助⼯具⽽之后逐渐演变成了⼀种实⽤性很强的⼯具。
1984,MathWorks软件公司推出了⼀种⾼级语⾔。
它不但能编程还能⽤于数值计算以及图形显⽰,并⽤与控制系统以及⼯程设计。
90年,MathWorks 软件公司为Matlab开发了⼀种新的⽤于图形控制及仿真模型建⽴的软件Simulink。
它是Matlab的⼀个扩展软件模块,这个模块为⽤户提供了⼀个⽤于建模仿真各种数学物理模型的软件,并且提供各种动态的结构模型,是⽤户可以快速⽅便的建模并且仿真,⽽不必写任何程序。
基于此优点,该⼯具很快被业界认可,并⽤于各种控制系统。
Matlab编程⼯具不像C语⾔那样难以掌握,所以在这种仿真环境下⽤户只需要简单的列出计算式,结果便会以数值或图形的⽅式显⽰出来。
从Matlab被发明以来,它的快速性集成性、以及应⽤的⽅便性在⾼校中得到了好评。
它可以很⽅便的进⾏图形输出输⼊,同时还具有⼯具箱函数库,也能针对各个学科领域实现各种计算功能。
另外,Matlab和其他⾼级语⾔也具有良好的接⼝,可以⽅便地与其他语⾔实现混合编程,这都进⼀步拓宽了它的应⽤范围和使⽤领域。
Matlab由主程序、Simulink动态仿真系统、和Matlab⼯具箱三部分组成。
其中主程序包括Matlab语⾔、⼯作环境以及应⽤程序;Simulink动态仿真系统是⼀个相互交互的系统,⽤户制作⼀个模拟系统,并动态控制它;⽽⼯具箱就是Matlab基本语句的各种⼦程序和函数库。
它有可以分为功能性和学科性⼯具箱。
功能性的⼯具箱主要⽤于扩展Matlab的符号计算功能、图形建模功能、⽂字处理功能和与硬件的实时交互过程,如符号计算⼯具箱等;学科性的⼯具箱则有较强的专业性,⽤于解决特定的问题,如信号处理⼯具箱和通信⼯具箱。
saber与matlab协同仿真

一Saber可以和Simulink实现协同仿真(Co-Sim),仿真时以Saber为主机,调用Simulink,两个软件以固定时间步长交换数据.运用Saber和Simulink 进行协同仿真的关键在于接口定义,需要在两个软件环境中分别进行适当的定义,才能实现Co-Sim.下面以Saber软件自带的实例来介绍一下如何实现Saber/Simulink协同仿真.首先确定是否已经安装了Saber和Simulink软件,本文Saber的版本是2012, MATLAB的版本是R2010b.接下来需要在Sketch中安装与Simulink 版本匹配的Co-Sim文件,具体过程如下:1 在Sketch环境中打开Open the Saber/Simulink co-simulation tool 出现如下图所示的界面.2 选择Edit->Matlab>set up... 命令出现如下图所示的对话框.3 在该对话框中选择合适的MATLAB版本并将需要的文件安装在MATLAB安装目录下的work目录下,共有三个文件,具体如下:SaberSimulinkCosim.dllSaberCosim.mdlsaber.jpg二接下来需要在Simulink中定义有Simulink仿真的那部分模型的输入输出接口.本文选择的是Saber软件自带的Saber/Simulink RTW实例,位于E:\saber2012 \lib\tool_model\Simulink2SaberRTWexport \throttle_controller目录下,对该实例进行适当的修改,就可以用来实现Saber/Simulink的协同仿真.(这里需要注意MATLAB版本,不同的版本有不同的目录,都在D:\saber\Saber\lib\tool_model\目录下),具体过程如下:1.启动Simulink并打开实例文件THROTTLE_CONTROLLER.mdl, 打开以后的文件如下图所示:2.对该图进行修改,修改完毕后将原理图另存为throttle_controller_cosim.mdl如下图所示:3.在Simulink中打开SaberCosim.mdl文件,文件位于MATLAB安装目录下的work目录,如下图所示:4.将SaberCosim图标放入刚才修改另存的throttle_controller_cosim.mdl原理图,完成连线后如下图所示:并将该文件一定保存位于matlab的work目录下5.双击SaberCosim图标,设置输入输出端口数如下图所示:6.选择Tools/Real Time/Option 命令,弹出对话筐,在对话框中的左边选择Solver,在右边Solver Options栏中设置Type 为Variable-step,相关设置如下图所示,之后保存文件并关闭MATLAB程序.三接下来需要在Saber中定义输入输出接口以便进行协同仿真,具体过程如下1. 启动Sketch并打开throttle_control_system.ai_sch文件,如下图所示:2.删除图中的throttle_controler符号,如下图所示:3 在Sketch启动SaberSimulinkCosim Tool,并在其界面中选择File/Import Simulink 命令,在弹出的对话框中选择throttle_controller_cosim.mdl文件,SaberSimulinkCosim Tool会自动为该MATLAB模型建立相关Saber符号,如下图所示:注意: 上图中左上方的Cosim Step Size(s)栏可以设置Saber和SIMULINK数据同步的步长,默认值为1ms, 根据系统时间常数来设置.4 保存上一步创建的符号并利用Sketch中的Schematic/Get Part/By Symbol Name 命令将该符号放入第2步修改好的原理图中,完成连线后,将该图另存为throttle_control_system_cosim.ai_sch有一点很重要,一定要在matlab里将work目录设置为matlab的搜素路径中如下图所示四接下来可以在Sketch环境中运行Saber/Simulink Co-Sim了,具体过程如下:1.对throttle_control_system_cosim.ai_sch执行Design/Netlist 命令,之后运行Design/Simulate命令,如果一切顺利,在这一过程中自动会启动MATLAB.2.设置TR分析,如下图所示:3.单击OK按钮,分析结束后可以在Scope中查看分析结果,可以自己去试试.从整个Saber/Simulink 协同仿真的过程看,关键是要合理的定义Simulink和Saber的接口,把握好这个环节,协同仿真就能正常工作了.在整个协同仿真过程中,Saber作为主机调用Simulink,从仿真设置到观察结果都可以在Saber环境中完成,Simulink只是做后台运行和处理.。
[整理]Saber中如何控制TR分析的仿真数据大小.
![[整理]Saber中如何控制TR分析的仿真数据大小.](https://img.taocdn.com/s3/m/564ff4ab8bd63186bcebbcfc.png)
Saber中如何控制TR分析的仿真数据大小很多用过Saber的网友都会有这种感觉,就是Saber是一个非常吃硬盘空间的仿真工具.在仿真开关电源此类的非线性系统时,其仿真结果往往会占用大量的硬盘空间.今天就来和大家讨论一下如何为Saber的时域分析(TR)减负的问题.在Saber的Time-Domain Transient Analysis(即TR分析)对话框中,在Input/Output栏,有三种参数可以控制TR分析结果大小.它们分别是:1. Signal List2. Waveforms at pins3. Data file下面我们简单分析一下这几个参数的意义以及如何设置才能减少仿真数据.1. Signal List---用来确定仿真结果仿真中带有哪些节点信号.其默认值是All Toplevel Singals,意思是在仿真结果文件中包含所有的顶层信号.其提供的第二项选择是All Signals,意思是在仿真结果中包含所有的信号(包括所有的底层信号).在仿真过程中,我们往往不需要观测所有的节点信号变量,而只需要对部分信号进行分析,此时如果选择前面两个选项就会在仿真结果文件中附加很多我们不需要的信号,从而增大了仿真结果文件所占用的空间.因此,我们就可以利用 Signal List 提供的Browse Design 选项,手动的选择自己需要观测的信号,这样就能大大的节省仿真结果文件所占的空间.2. Waveforms at Pins---用来确定仿真结果中节点信号变量的性质.Saber软件中用跨接变量(Across Variable)和贯通变量(Through Variable)来表示不同性质的节点信号.对于电系统而言,Across Variable 指节点电压,而Through Variable 指节点电流.当然,对于其他系统来说,这两个变量又有着不同的含义,比如对于机械系统,Across Variable 指位移或者角度,而Through Variable 指力.具体定义可参考saber的帮助文档. 这个设置默认的选项是Across Variables Only,意思是在仿真结果文件中只包含 Across Variable,另外两个选项是 Through Variables Only和 Across and Through Variables. 如果选择cross and Through Variables就会在仿真结果文件中包含两种变量,此时将增大仿真结果文件所占用空间,因此在不需要同时观测两种性质信号时,可根据需要选择一种,这样就能节省仿真结果文件所占的空间.3. Data File --- 这项设置对于节省仿真结果文件所占空间非常有用,它用来确定仿真过程中数据文件的名称.这里需要进行一点解释,Saber软件在TR分析的时候,除了根据Signal List 以及 Waveforms at Pins 设置产生相应的波形文件以外,还会将整个仿真过程中所有的仿真数据保存在一种数据文件中,这种数据文件的名称是由Data File 设置来确定的.这些数据文件通常用于以TR分析为基础的后续分析,比如Stress,Sensitivity等等,另外,Saber中还有一个功能叫做Extract,它可以从数据文件中抽取你需要观测的信号并生成波形文件,便于对一些在Signal List 中没有指定的信号进行观察.由于数据文件包含了所有的仿真数据,所有它需要占用非常大的硬盘空间,因此,当你确定不需要在TR分析之后做任何后续分析,也不需要在抽取任何信号的时候,就可以通过设置Data File,告诉仿真器不生成数据文件,从而大大节省了硬盘空间.具体方法是:将Data File 栏设置为下划线 " _ " 就可以了.(注意设置的时候双引号要去掉)关于Saber使用的几个Q/A:1.如何打开别人建立的子模块以便看到内部电路?右键单击模块的符号,应该能看到弹出菜单中 Open Hierarchy 命令, 选择该命令可打开符号代表的底层电路.如果没有该命令,则表明符号没有底层电路图,是一个model或者template.2.如何将建立的子模块加入设计中?如果你已经为子模块建立了符号,可按如下顺序操作:a. 将符号以及子模块电路拷贝到设计所在目录;b. 在sabersketch 中打开原理图,选择Schematic/Get Part/By Symbol Name...命令;c. 在弹出的对话框单击browse按钮,并选择子模块对于的符号;d. 单击 place 按钮就可以将子模块加入设计中.3.查找功能好像没有用?PartGallery的 search功能是能用的,并支持通配符检索,你能否具体一点,是什么的查找功能不好用.4.在CosmosScope中我如果想把几个输出波形放在同一个图里,并且它们的单位量度不同,不知道能否实现?可以的,具体情况可以参考我的博客中的这篇文章《Scope中如何将多个信号放置在同一坐标系中》.5.PowerMosfet工具能否用于IGBT?不能.新版的Saber带有专用的IGBT建模工具.Saber软件和其它软件的接口2006-08-24 23:41 分类:Saber软件使用技巧Saber软件和其它EDA工具软件的接口形式主要有四种1.原理图接口2.仿真接口(协同仿真)3.数据接口(MATLAB接口)4.模型接口1.原理图接口-使用其它EDA软件的原理图录入工具进行原理图录入(符号库由Saber提供),在其环境中可调用SaberGuide、SaberScope,SaberGuide用于设置分析环境、SaberScope用于查看分析结果,并支持一些交互功.需要安装Saber软件中的Frameway工具.1.1 Saber同Mentor公司软件的接口.Saber软件的Frameway可支持Mentor公司的EN2001.1软件包的原理图录入工具(UNIX平台) Design ArchitechDesign Viewpoint EditorDesing ManagerDesign Manager 环境可以启动Design Viewpoint Editor、Design Architech两个工具,在安装工具集成包(Frameway中自带)以后,可在Design Manager环境中通过菜单和工具栏启动SaberGuide、SaberScope.Design Viewpoint Editor 不是原理图录入工具,因此在安装工具集成包(Frameway中自带)以后,也无法使用Saber软件提供的符号库,但它支持交叉探针(CrossProbe)、反标直流值(Back-annotation)、Saber中的修改参数(alter)命令.Desing Architect 是原理图录入工具,因此在安装工具集成包(Frameway中自带)以后,可使用Saber软件提供的符号库,并支持一定的交互功能.详细资料参见MentorGraphicsRef.pdf.1.2 Saber同Cadence公司软件的接口.Saber软件的Frameway可支持Cadence公司的原理图录入工具(UNIX平台)CDS4.45/4.46.ICMS 是原理图录入工具,因此在安装工具集成包(Frameway中自带)以后,可使用Saber软件提供的符号库,并支持一定的交互功能.详细资料参见CadenceRef.pdf.1.3 Saber同ViewLogic公司软件的接口.Saber软件的Frameway可支持ViewLogic公司的原理图录入工具EPD2.0(Windows NT 平台)-WorkView/ViewDraw ViewDraw 是原理图录入工具,因此在安装工具集成包(Frameway中自带)以后,可使用Saber软件提供的符号库,并支持一定的交互功能详细.资料参见ViewlogicRef.pdf.(注:ViewLogic公司已被Mentor公司收购,其产品现在在ePD的软件包中)1.4 Saber同EDIF标准(电子文档交换格式)之间的接口,Saber软件Frameway可支持EDIF2.0标准(UNIX平台)Saber软件和其它软件的接口(续)2006-08-25 23:41 分类:Saber软件使用技巧2.协同仿真接口-Saber软件通过Co-Simulator接口,可以和数字仿真软件进行协同仿真,Saber仿真设计中的模拟和数字部分,而数字仿真软件仿真设计中用VHDL/Verilog言语描述的部分.2.1 Saber软件同VHDL仿真软件的接口.Saber软件通过Saber/Modelsim Co-Sim接口支持Model Technology公司的产品.协同仿真有两种类型:a.Modelsim 作为主仿真器(master),Saber作为从仿真器(操作界面是Modelsim)b.Saber作为主仿真器(master),Modelsim作为从仿真器(操作界面是Saber)Modelsim图形用户界面显示设计中VHDL部分的仿真波形,SaberScope显示设计的其它部分仿真波形.详细资料参阅SaberModelSimCoSimRef.pdf.(注:Model Technology公司已被Mentor公司收购,Modelsim工具现在在FPGA Advantage软件包中)2.2 Saber软件同Verilog仿真软件的接口Saber软件通过Saber/Verilog Co-Sim接口支持Synopsys和Cadence公司的产品.(UNIX平台)VCS(SYNOPSYS)Verilog-XL2.7(CADENCE)协同仿真有两种类型:a.VCS/Verilog-XL 作为主仿真器(master),Saber作为从仿真器(操作界面是Verilog-XL)b.Saber作为主仿真器(master),Verilog-XL作为从仿真器(操作界面是Saber)SaberScope显示设计的仿真波形.详细资料参阅VerilogCoSimulationUser.pdf.3.数据接口Saber软件通过SaberLink接口,可以和系统仿真软件MATLAB进行数据交换,可以把MATLAB 软件的仿真数据输入到Saber中,也可以把Saber软件仿真设计输入到MATLAB中,并可以通过SaberLink接口执行MATLAB的各种分析命令.SaberLink支持的MATLAB版本为MATLAB5.3.4. 模型接口Saber软件除了使用自带的模型(*.sin文件)以外,还兼容SPICE2G.6、SPICE3、PSPICE、HSPICE模型,通过Saber软件的Nspitos工具,可以把基于上述标准的模型转换为Saber能够使用的模型(MAST言语描述的*.sin文件).详细资料查阅PartsGalleryRef.pdf.如何使用下载的Saber模型2006-08-30 22:41 分类:Saber软件使用技巧在许多IC厂商的网站上,会有一些基于Saber软件的模型可供下载使用.今天来简单讨论一下如何在Saber中使用这些模型.其实很简单,当你下载完基于Saber软件的模型(*.sin文件)以后,所需要做的事情就是为这个模型建立一个同名的符号(*.ai_sym文件),并设置两个属性值,就可以在SaberSketch中使用了.但需要注意的是,使用的时候符号(*.ai_sym文件)和模型(*.sin文件)都要放在工作目录下.下面简单举一个例子,假定从网上的下载的模型文件为 irq970.sin.如果利用文本编辑器打开该文件,一般能看到如下一段定义: template irq970 g d s = parameters....electrical g,d,s.......其中 irq970 后面的 g d s 定义了模型有三个管脚,分别为g、d、s.第二行定义了这三个管脚都是 electrical 的.看到这里就足够了,我们可以在根据这个在SaberSketch中为模型建立符号.具体过程如下:1.在SaberSketch中调用 new/symbol 命令创建一个新符号,然后运用Drawing Tool工具绘制符号的轮廓图形;2.单击鼠标右键,在弹出菜单中选择Create/Analog Port,这里要与electrical属性对应,为符号添加3个端口(port),即所谓的管脚;3.选中所添加的端口并单击鼠标右键,在弹出菜单中选择 Attributes... 命令.在弹出的Port Attributes 对话框中,设置Name为 g、d、s(注意:3个端口的Name各对应一个,相当于对应器件的管脚);4.在New Symbol窗口单击鼠标右键,在弹出菜单中选择 Properties...命令,会弹出Symbol Properties 对话框,在对话框中添加一项属性Primitive,其值设置为irq970(注意:这里对应的是模型的名字).5.选择File/Save命令,符号的名字为 irq970,并和模型(irq970.sin文件)保存在同一目录下.并再次在符号窗口单击右键,在弹出菜单中选择 Properties... 命令,此时软件自动为符号和模型建立映射关系,如果出错,则表明映射过程出了问题,需要根据提示对符号或者模型进行修改,如果没出错,会再次弹出Symbol Properties对话框.自此就完成了为模型创建符号的工作.需要注意的是,在使用模型的时候,需要将模型和符号文件同时拷入工作目录下,并通过Schematic/Get Part/By Symbold Name...命令进行调用.也可通过在PartGallery里右键单击某个目录,在弹出菜单中选择 New Part命令,将模型和符号加入PartGallery中,方便使用.关于Saber软件的接口模板(template)2006-09-03 11:50 分类:Saber软件使用技巧Saber软件具有很强的跨领域仿真能力,它能够对电气、机械、液压、磁、热、风力等领域以及控制理论常用S和Z域进行分析.由于不同领域的数学描述和分析方法差异很大,所以Saber针对不用的领域将会采用不同的建模和分析方法.另外,不同技术领域的单位定义也存在差别.因此,如果目标系统包含上述两种以上的技术领域,在SaberSketch绘制原理图的时候,凡是在跨领域的接口处,就一定需要添加接口转换模板,否则,Saber将报错,无法进行仿真.这里需要注意的是,Saber中电气系统仿真的时候,模拟电路和数字电路的处理方法也不同,在仿真时也需要在模拟电路和数字电路之间添加接口,但实际上在SaberSketch中绘制原理图的时候,不用去手动添加,用户在对原理图进行 Netlist 时候,Saber会自动在模拟和数字器件之间添加数模接口.关于模拟数字电路接口的使用和配置,可参考我的另一篇博客文章《在Saber中实现对CD4069数字器件的仿真》.Saber中不同领域之间的接口模板都可以在SaberSketch中的PartGallery找到,位于Control Systems/Interface Models 目录下.各种接口模板的命名规则也很简单.技术领域变量名称 to 技术领域变量名称. 举个例子,Angle to var 表示角度变量到无单位变量的转换.Position to var 表示位置到无单位变量的转换.当然,熟悉PartGallery的网友应该知道,要找什么模板可以利用Search功能.接口模板在命名的时候,采用了更为建好的命名方式,即取变量名称前几个字母+2+变量名称前几位字母.其中2代表to.对于上面例子的模板,Angle to Var 就变成了ang2var,Position to Var 变成了pos2var了.即如果想在PartGallery中利用Search功能查找角度到无单位变量的转换模板,输入ang2var即可.Saber2006.06-SP1中的新功能-清除多余文件2006-10-30 19:50 分类:Saber软件使用技巧经常用Saber的网友都清楚,Saber有一个让人感觉不方便的地方,就是仿真过程中会生成一大堆各种后缀的文件,即占硬盘空间,又不方便查找所需要的文件.如果手动清除,需要对各种文件的用途非常清楚,否则,一不小心可能会将有用的文件清除掉.最近在使用Saber最新版本2006.06-sp1时,发现新版本中增加了一个非常有用的功能,文件清除功能(clean files).该命令在Sketch界面中file菜单下:其基本界面如下图所示:该功能可以找出当前工作目录下所包含的各种非关键文件并显示出来,当确定要删除这些文件后,单击OK按钮就可以完成清除文件的工作了,非常方便实用.所要清除的文件类型可在Preferences标签栏设置,如下图所示:创建基于模型的符号-create symbol from model 2007-01-20 12:33 分类:Saber软件使用技巧在近在使用Saber的过程中,偶然发现Saber2006.06带有的新功能,create symbol from model.利用这个功能,可以自动的为自己编写的MAST语言模板创建一个在sketch中使用的符号(symbol),而以前这个过程是需要自己手动完成的.具体过程如下,假设我们要为一个名字为ovp的template创建一个symbol.ovp的模板头定义如下:template ovp set reset qoutstate logic_4 set, #set the qout to l4_1 by rise to l4_1reset, #reset the qout to l4_0 by fall to l4_0qout #ovp out从模板头可以看出,该template有3个数字端口,两个输入一个输出.在sketch中选择file/new symble 命令,出现符号编辑界面.然后在选择 symble/create/symbol from model 命令,如下图所示:之后在出现的对话框中利用browse命令,找到ovp.sin文件所在目录并选中ovp.sin文件,会出现如下图所示的编辑界面:在白色的Symble Editor Assistant界面中,可以调整管脚的位置,旋转符号等操作,在确定之后,选择save命令,会自动的保存为与template同名(这里是ovp.ai_sym)符号文件.这样,以后就可以在利用ovp.ai_sym在sketch中代替ovp.sin模型了.要引用这个symbol,可在sketch中选择schematic菜单下的命令,如下图所示:之后弹出的界面如下图所示:选择browse按钮,找到ovp.ai_sym文件,选中以后,按place按钮,就在原理图中放置了一个自己建立的符号.需要注意的是,在使用自己建立的模型符号时,需要将符号和模型copy到使用它们的原理图所在目录,才能正常使用,或者利用环境变量AI_SCH_PATH和SABER_DATA_PATH,为saber软件指定自己的符号库和模型库路径,然后在将自己建立的symbol和model copy到相应目录即可,在自己建立的模型和符号比较多的情况下,后者是比较方便的方法.SaberSketch 软件Bus总线的绘制方法2007-03-10 13:26 分类:Saber软件使用技巧记得以前有网友在博客上问我,Saber中如何绘制数据总线,今天我们就来讨论这个问题.首先需要明白,在SaberSketch中,连线有三种,wire,bus和bundle.wire主要用于连线绘制单线,bus用于绘制总线,bundle用于绘制线匝.在sabersketch中绘制bus,步骤如下:1. 选择bus的快捷按钮,如下图所示:2.在sketch中放置一条总线,如下图所示:3.双击所绘制的总线,弹出总线的attribute对话框,定义总线的名字和宽度,如下图所示:图中定义了一条名字为bus宽度为8位的总线,定义完成以后,单击apply按钮,然后单击close按钮退出对话框.4.用鼠标选中总线,单击右键,在弹出菜单中选择Rip Wire... 命令,如下图所示:此时会弹出一个对话框,里面列出了总线中所有单线的名字,如下图所示:选中其中一条并单击OK按钮,之后在sketch中完成该单线的绘制,如下图所示:5.重复步骤4直至所有需要绘制的单线都完成,如下图所示:。
Saber软件仿真流程
Saber软件仿真流程:今天来简单谈谈Saber软件的仿真流程问题。
利用Saber软件进行仿真分析主要有两种途径,一种是基于原理图进行仿真分析,另一种是基于网表进行仿真分析。
前一种方法的基本过程如下:a.在SaberSketch中完成原理图录入工作;b.然后使用netlist命令为原理图产生相应的网表;c.在使用simulate 命令将原理图所对应的网表文件加载到仿真器中,同时在Sketch中启动SaberGuide界面;d.在SaberGuide界面下设置所需要的仿真分析环境,并启动仿真;e.仿真结束以后利用CosmosScope工具对仿真结果进行分析处理。
在这种方法中,需要使用SaberSketch和CosmosScope两个工具,但从原理图开始,比较直观。
所以,多数Saber的使用者都采用这种方法进行仿真分析。
但它有一个不好的地方就是仿真分析设置和结果观察在两个工具中进行,在需要反复修改测试的情况下,需要在两个窗口间来回切换,比较麻烦。
而另一种方法则正好能弥补它的不足。
基于网表的分析基本过程如下:a. 启动SaberGuide环境,即平时大家所看到的Saber Simulator图标,并利用load design 命令加载需要仿真的网表文件;b. 在SaberGuide界面下设置所需要的仿真分析环境,并启动仿真;c. 仿真结束以后直接在SaberGuide环境下观察和分析仿真结果。
这种方法要比前一种少很多步骤,并可以在单一环境下实现对目标系统的仿真分析,使用效率很高。
但它由于使用网表为基础,很不直观,因此多用于电路系统结构已经稳定,只需要反复调试各种参数的情况;同时还需要使用者对Saber软件网表语法结构非常了解,以便在需要修改电路参数和结构的情况下,能够直接对网表文件进行编辑。
Sketch的使用:1.今天讨论Saber Sketch的使用。
如果我们采样基于原理图的仿真方式,那么Sketch是我们在整个仿真过程中主要操作的一个界面。
(完整版)Saber仿真软件介绍

Saber 软件简介Saber软件主要用于外围电路的仿真模拟,包括SaberSketch和SaberDesigner 两部分。
SaberSketch用于绘制电路图,而SaberDesigner用于对电路仿真模拟,模拟结果可在SaberScope和DesignProbe中查看。
Saber的特点归纳有以下几条:1.集成度高:从调用画图程序到仿真模拟,可以在一个环境中完成,不用四处切换工作环境。
2.完整的图形查看功能:Saber提供了SaberScope和DesignProbe来查看仿真结果,而SaberScope功能更加强大。
3.各种完整的高级仿真:可进行偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等。
4.模块化和层次化:可将一部分电路块创建成一个符号表示,用于层次设计,并可对子电路和整体电路仿真模拟。
5.模拟行为模型:对电路在实际应用中的可能遇到的情况,如温度变化及各部件参数漂移等,进行仿真模拟.第一章用SaberSketch画电路图在SaberSketch的画图工具中包括了模拟电路、数字电路、机械等模拟技术库,也可以大致分成原有库和自定义库。
要调用库,在Parts Gallery中,通过对库的描述、符号名称、MAST模板名称等,进行搜索。
画完电路图后,在SaberSketch界面可以直接调用SaberGuide对电路进行模拟,SaberGuide 的所有功能在SaberSketch中都可以直接调用。
➢启动SaberSketchSaberSketch包含电路图和符号编辑器,在电路图编辑器中,可以创建电路图。
如果要把电路图作为一个更大系统的一部分,可以用SaberSketch将该电路图用一个符号表示,作为一个块电路使用。
启动SaberSketch:▲UNIX:在UNIX窗口中键入 Sketch▲Windows NT:在SaberDesigner程序组中双击SaberSketch图标下面是SaberSketch的用户界面及主要部分名称,见图1-1:退出SaberSketch用 File〉Exit。
电气模型_Saber软件介绍
Saber 软件介绍一、SABER 软件概述•Saber是美国Analogy(Synopsys)公司开发的系统仿真软件,被誉为全球最先进的系统仿真软件,也是唯一的多技术、多领域的系统仿真产品,现已成为混合信号、混合技术设计和验证工具的业界标准,可用于电子、电力电子、机电一体化、机械、光电、光学、控制等不同类型系统构成的混合系统仿真,这也是Saber的最大特点。
SABER作为混合仿真系统,可以兼容模拟、数字、控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
1.1 原理图输入和仿真SaberSketch是Saber的原理图输入工具,通过它可以直接进入Saber仿真引擎。
在SaberSketch 中,用户能够创建自己的原理图,启动Saber完成各种仿真(偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等),可以直接在原理图上查看仿真结果,SaberSketch及其仿真功能可以帮助用户完成混合信号、混合技术(电气、液压等)系统的仿真分析。
SaberSketch中的原理图可以输出成多种标准图形格式,用于报告、设计审阅或创建文档。
1.2 数据可视化和分析SaberScope是Saber的波形查看和仿真结果分析工具,它的测量工具有50多种标准的测量功能,可以对波形进行准确的定量分析。
它的专利工具——波形计算器,可以对波形进行多种数学操作。
SaberScope中的图形也可以输出成多种标准图形格式用于文档。
1.3 模型库Saber拥有市场上最大的电气、混合信号、混合技术模型库,它具有很大的通用模型库和较为精确的具体型号的器件模型,其元件模型库中有4700多种带具体型号的器件模型,500多种通用模型,能够满足航空、汽车、船舶和电源设计的需求。
Saber模型库向用户提供了不同层次的模型,支持自上而下或自下而上的系统仿真方法,这些模型采用最新的硬件描述语言(HDL),最大限度地保证了模型的准确性,支持模型共享。
基于Saber的充电机功率模块电路仿真与分析

• 80•通过电路仿真可以缩短产品开发周期,减小研究开发成本。
充电机功率模块应用在新八轴电力机车上,是机车辅助变流系统中一个重要的组成模块单元。
本文对充电机功率模块主要部件进行参数计算和选型,并采用Saber 仿真软件对充电机功率模块进行仿真研究,来验证器件选型的可行性。
从现有的电力电子装置情况看,工程工作人员通常以自身经验为基础来实施元器件更换,改变结构让装置能够保持应有的动态与静态特性也是按照自身经验来实施的。
计算机仿真的应用能大大的改善上述情况对工作效率的负面影响,快捷的对元器件进行更换与改变,进而优化产品开发周期与开发研究成本。
Saber 是美国Analogy 公司开发, Saber 作为混合仿真系统,可以兼容模拟、数字、控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
Saber 的分析功能比较强大,主要有DC 分析,用于计算设计的工作点;瞬态分析,分析确定系统的时域响应;频响分析,分析系统随频率变化的响应特征;傅里叶和快速傅里叶变换分析,将时域波形变换成频谱;逆快速傅立叶变换分析,将频域波形变换成时域波形;以及蒙特卡洛、噪声等随机分析和参数扫描、应力分析等。
因此,在Saber 中建立系统的模型,仿真各种控制策略,模拟各类实际中的稳态瞬态状态,进而发挥优化开发费用与缩短研究等应用目的。
1 充电机主电路原理1.1 电路的拓扑结构充电机采用半桥式逆变电路作为充电机主电路拓扑,如图1所示:图1 半桥式逆变电路这是一个单相电压型半桥逆变电路,如图1所示,两个桥臂从结构上看,包括可控器件与反并联二极管。
在直流侧接中存在着直流电源的中点,这个中点也是两个电容的连接点,是两个能够相互串联的电容。
在直流电源中点和两个桥臂联结点之间实现负载连接。
1.2 电路的工作原理f --工作频率;t ON --IGBT 导通时间;U E , I E --充电机输入电压和电流;U S , I S --充电机输出电压和电流;U RED --整流后的输出电压;N =U S 1 / U P --变压器系数比;--占空比。
MATLAB的特点
MATLAB的特点1.高效的数值计算能力:MATLAB通过使用高性能的数值计算库,能够快速、精确地执行各种数学运算。
它支持各种矩阵运算、线性代数操作、数值积分、微分方程求解等,并且拥有高精度的计算结果。
2.易于使用的编程语言:MATLAB采用了一种类似于自然语言的编程语言,使得用户可以轻松地编写和调试代码。
这种语言具有丰富的数学函数和工具包,可以简化复杂的计算过程。
此外,MATLAB还提供了强大的调试和性能优化工具,以帮助用户编写更高效、更可靠的代码。
3.丰富的工具箱和函数库:MATLAB拥有庞大的工具箱和函数库,涵盖了各种科学计算、工程计算和数据分析的领域。
用户可以使用这些工具箱和函数库来解决各种复杂的计算问题,例如信号处理、图像处理、控制系统设计、优化、统计分析等。
4.强大的数据可视化能力:MATLAB提供了丰富的绘图和可视化功能,使用户能够将计算结果以直观、易于理解的图形方式展示出来。
用户可以绘制各种类型的图表,包括线图、散点图、柱状图、等高线图、曲面图等,还可以对图形进行自定义和美化。
5.大量的第三方工具和社区支持:MATLAB拥有广泛的第三方工具和函数库,用户可以根据自己的需要选择并集成这些工具。
此外,MATLAB还有一个庞大的用户社区,用户可以在社区中共享代码和经验,获取解决问题的帮助。
6. 跨平台的兼容性:MATLAB可以在各种操作系统上运行,包括Windows、Mac和Linux等。
用户可以在不同的平台上共享和执行MATLAB代码,实现平台间的无缝协作和迁移。
7. 可扩展性和自定义性:MATLAB提供了丰富的接口和工具,用户可以根据自己的需求进行功能扩展和自定义开发。
用户可以编写自己的函数和脚本,并与其他编程语言(如C/C++、Java和Python等)进行交互。
8.并行计算和分布式计算支持:MATLAB提供了并行计算和分布式计算的支持,用户可以利用多核和多节点系统来加速计算过程。
MATLAB与其他编程语言对比与选择指南
MATLAB与其他编程语言对比与选择指南引言在计算机科学和工程领域,选择一种合适的编程语言对项目的开发和实施至关重要。
编程语言的选择往往涉及到项目的规模、复杂性以及所需的计算资源。
本文将重点讨论MATLAB与其他常见编程语言的比较和选择指南,以帮助读者了解何时适合使用MATLAB以及何时需要考虑其他编程语言。
一、MATLAB简介及特点MATLAB(Matrix Laboratory,矩阵实验室)是一种功能强大的科学计算和数据分析工具,可用于各种领域,包括数学、物理、生物学、工程学等等。
MATLAB的主要特点如下:1. 语法简洁易学:MATLAB的语法类似于数学语言,易于理解和学习。
它使用矩阵表示数据,使向量和矩阵操作变得简单直观。
2. 丰富的工具箱:MATLAB提供了大量的工具箱,可以帮助用户进行图像处理、信号处理、优化、控制系统设计等任务。
这些工具箱提供了许多预先编写好的函数和算法,方便用户快速完成各种任务。
3. 强大的可视化能力:MATLAB具有出色的绘图和可视化功能,可以轻松生成高质量的图形和图表。
这对于数据分析、模型验证和结果呈现非常有帮助。
4. 丰富的社区支持:MATLAB拥有庞大的用户社区,用户可以通过官方文档、在线教程和问答平台等途径获得帮助和支持。
二、MATLAB与其他编程语言的比较1. MATLAB vs PythonPython是一种通用目的的编程语言,与MATLAB相比,它具有以下优势:- 开源免费:Python是开源的,用户可以免费使用和分发。
相比之下,MATLAB是商业软件,需要购买和获得许可。
- 生态系统庞大:Python具有庞大的第三方库和扩展,涵盖了各种领域的应用。
这使得Python更适合于大规模项目和复杂的数据分析任务。
- 跨平台:Python支持多个操作系统,可以轻松在不同的平台上运行。
然而,MATLAB也有其独特的优势:- 面向科学计算:MATLAB专注于科学计算和工程领域,提供了许多针对特定任务的工具箱和函数。
Matlab编程和其他语言的区别
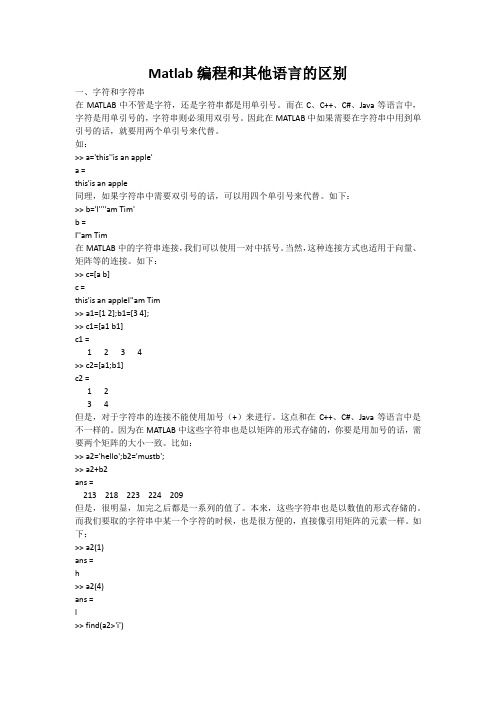
Matlab编程和其他语言的区别一、字符和字符串在MATLAB中不管是字符,还是字符串都是用单引号。
而在C、C++、C#、Java等语言中,字符是用单引号的,字符串则必须用双引号。
因此在MATLAB中如果需要在字符串中用到单引号的话,就要用两个单引号来代替。
如:>> a='this''is an apple'a =this'is an apple同理,如果字符串中需要双引号的话,可以用四个单引号来代替。
如下:>> b='I''''am Tim'b =I''am Tim在MATLAB中的字符串连接,我们可以使用一对中括号。
当然,这种连接方式也适用于向量、矩阵等的连接。
如下:>> c=[a b]c =this'is an appleI''am Tim>> a1=[1 2];b1=[3 4];>> c1=[a1 b1]c1 =1 2 3 4>> c2=[a1;b1]c2 =1 23 4但是,对于字符串的连接不能使用加号(+)来进行。
这点和在C++、C#、Java等语言中是不一样的。
因为在MATLAB中这些字符串也是以矩阵的形式存储的,你要是用加号的话,需要两个矩阵的大小一致。
比如:>> a2='hello';b2='mustb';>> a2+b2ans =213 218 223 224 209但是,很明显,加完之后都是一系列的值了。
本来,这些字符串也是以数值的形式存储的。
而我们要取的字符串中某一个字符的时候,也是很方便的,直接像引用矩阵的元素一样。
如下:>> a2(1)ans =h>> a2(4)ans =l>> find(a2>'i')ans =3 4 5可以看到,a2里面在字母i后面的字符有第3、4、5个字符,也就是llo了。
saber与matlab协同仿真
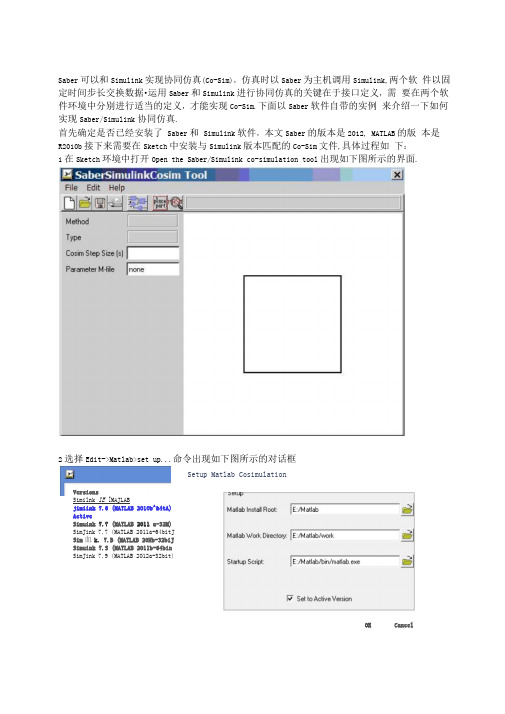
Saber可以和Simulink实现协同仿真(Co-Sim),仿真时以Saber为主机调用Simulink,两个软件以固定时间步长交换数据•运用Saber和Simulink进行协同仿真的关键在于接口定义,需要在两个软件环境中分别进行适当的定义,才能实现Co-Sim.下面以Saber软件自带的实例来介绍一下如何实现Saber/Simulink协同仿真.首先确定是否已经安装了Saber和Simulink软件,本文Saber的版本是2012, MATLAB的版本是R2010b接下来需要在Sketch中安装与Simulink版本匹配的Co-Sim文件,具体过程如下:1在Sketch环境中打开Open the Saber/Simulink co-simulation tool出现如下图所示的界面.2选择Edit->Matlab>set up...命令出现如下图所示的对话框Setup Matlab CosimulationVersionsSimilnk IE [MAJLABjimiink 7.6 (MATLAB 2O1Ob^&4tA)ActiveSimuink 7.7 (MATLAB 2011 a-32M)SimJink 7.7 (MATLAB 2011a-64bitJ5im血k. 7.B (MATLAB 20Hb-32biJSimuink 7.S (MATLAB 2O11b-64binSimJink 7.9 (MATLAB 2O12a-32bit)OK Cancel3在该对话框中选择合适的MATLAB版本并将需要的文件安装在MATLAB安装目录下的work目录下,共有三个文件,具体如下:SaberSimuli nkCosim.dllSaberCosim.mdlsaber.jpg接下来需要在Simulink中定义有Simulink仿真的那部分模型的输入输出接口.本文选择的是Saber软件自带的Saber/Simulink RTW实例,位于E:\saber2012 \lib\tool_model\Simuli nk2SaberRTWexport \throttle_c on troller目录下,对该实例进行适当的修改,就可以用来实现Saber/Simulink的协同仿真.(这里需要注意MATLAB版本,不同的版本有不同的目录,都在目录下),具体过程如下:1.启动Simulink并打开实例文件THROTTLE_CONTROLLER.mdl,打开以后的文件如下图所示:D I屈R豊丸申宕| ©二|卜■ |伽|硼胡~三|鸟理囹欝釦号囲虚令鲁3.在Simulink中打开SaberCosim.mdl文件,文件位于MATLAB安装目录下的work目录,如下图所示:4.将SaberCosim 图标放入刚才修改另存的throttle_controller_cosim.mdl 原理图,完成连线后如 下图所示:并将该文件一定保存位于matlab 的work 目录下5.双击SaberCosim 图标,设置输入输出端口数如下图所示6.选择Tools/Real Time/Option 命令,弹出对话筐,在对话框中的左边选择 Solver,在右边 Solver Options 栏中设置Type 为Variable-step,相关设置如下图所示,之后保存文件并关闭 MATLAB 程序.Gain ScopeSalver:-Qp tiaiiz;:aticirLDiasno.rtiGsp S-aMple Timu;j Datia Validity TypeConversi&ii p-Connectivity p-Cowatibility ModelReferencing [-■Saving ^-■Statrflov7-Hardware Inpleiten.. -B r-Ma del Referencing z^-Sinulation Target r-Synbols L-Custo> Coderj Raal-TiJie Horksh cip p-Report p-Coiuient-s卜Symbols [■■CustoR Code ;Debus接下来需要在Saber中定义输入输出接口以便进行协同仿真,具体过程如下1.启动Sketch并打开throttle_control_system.ai_sch文件,如下图所示:Electronic Throttle ControllerConfiguration Parameters: THROTTLE_C0NTROLLER_cosim/Configuration [Active]i- Simulaticn tin.eZero-crossing control: |Use local settingsTine tolerance | ]0+128*epENumber of consecutive zero cro;sins£:Algorithu:Signal thrsshald:KonadaptiveautoApplyScHTIware and InlerTace IM) and)OVA} Mallath'Simulink ModelFrom Engine ControllerConvjriErFeedbackPotentiorneterUator FWM driverStop tinte [TStart time |Q.0Type|¥ari able-step ■] Salvor:|ade46 C Domand-P mice)▼Kax step size |auto Relative tolerance:|le-3Hin step size|auto Absolute tolerance: | autoInitial step size:| auto Shape presarvatian:|Enable allNumber oi consecutivs jnin sleeps:11-Zerft-crossirag optionsSolver options2.删除图中的throttle_controler 符号,如下图所示:Electronic Throttle Controller3 在 Sketch 启动 SaberSimulinkCosim Tool,并在其界面中选择 File/lmport Simulink 命令,在 弹出的对话框中选择 throttle_controller_cosim.mdl 文件,SaberSimulinkCosim Tool 会自动为该 MATLAB 模型建立相关Saber 符号,如下图所示:Throve \FB&dbackPolentFomaterSoftware and Inlerface (A/D and D/A> Manatk*simu link ModelFile Edrt Help注意:上图中左上方的Cosim Step Size(s栏可以设置Saber和SIMULINK 数据同步的步长, 默认值为1ms,根据系统时间常数来设置.4保存上一步创建的符号并利用Sketch中的Schematic/Get Part/By Symbol Name命令将该符号放入第2步修改好的原理图中,完成连线后,将该图另存为throttle_c on trol_system_cosim.ai_sch有一点很重要,一定要在 matlab 里将work 目录设置为 matlab 的搜素路径中如下图所示四接下来可以在Sketch 环境中运行Saber/Simulink Co-Sim 了,具体过程如下:1.对 throttle_control_system_cosim.ai_sch 执行 Design/Netlist 命令,之后运行 Design/Simulate 命令,如果一切顺利 N 这一过程中自动会启动MATLAB.ThrottleFrorrii Engine ControllerMotor PWM <3werCon verierFeedbackPotentiarrireterPOffset凹 Skctth-s EB斤1 串 V MWC^pign 女加m*屮百 F站E 吐理声 iR.艸 H hvb# iMnifcNi H<lp丰匕*®占日減®輕® g 沁 逸UvdhL.owiML4r^n E ■血 >CH J AftS 住尸;少月d 岂・・忙口孤・县S---------------------------------------------- ^Ttr4ii T吐甘来 SiHntiK dw^eMUd tjnWn teatfi | 打Electronic Throttle ControllerFrom Enginci ControlterOffsetcanvenerSoftwsre and Ini Matlab/SimulinkSalbEr FSlmulertg r2.设置TR 分析,如下图所示:3.单击OK按钮,分析结束后可以在Scope中查看分析结果,可以自己去试试.从整个Saber/Simulink协同仿真的过程看,关键是要合理的定义Simulink和Saber的接口, 把握好这个环节,协同仿真就能正常工作了.在整个协同仿真过程中,Saber 作为主机调用Simulink,从仿真设置到观察结果都可以在Saber环境中完成,Simulink只是做后台运行和处理.。
UPS系统中PWM整流器的研究

UPS系统中PWM整流器的研究刘岫岭【摘要】针对传统UPS电源系统在低压时电压利用率低、谐波大的缺点,提出一种双闭环参数整定的方法,该方法将传统单相电压型PWMUPS系统改进为双闭环系统的参数整定方案,采用电流内环、电压外环相结合的双闭环控制方式,再通过理论分析、建模和仿真,最终达到系统功率因数接近于1的目的;仿真结果与理论分析的结果基本相同,验证了此方法的正确性和可行性.%In view of the low utilization ratio and big harmonic of traditional UPS power supply system when in low voltage, a double closed-loop parameters setting method is proposed, which improves the traditional single-phase voltage type PWMUPS system to double closed loop system parameter setting, adopting the combination of current inner loop andvoltage outer loop double closed loop control method, and through theoretical analysis, modeling and simulation, finally achieving the goal that system powerfactor is close to 1. The simulation results and theoretical analysis results are basically the same, which verifies the correctness and feasibility of the method.【期刊名称】《价值工程》【年(卷),期】2016(035)006【总页数】3页(P146-148)【关键词】PWM整流器;UPS;谐波污染;正弦波脉宽调制【作者】刘岫岭【作者单位】黑龙江科技大学,哈尔滨150022【正文语种】中文【中图分类】TM461近年来,电网质量逐渐下降,电涌、电线噪声、电压下陷、市电中断等现象时有发生,严重影响了关键设备的正常运转及安全[1,2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
推进系统仿真平台SABER与MATLAB的比较1引言Saber和Matlab/Simulink不是直接竞争产品,它们仿真原理不同,侧重的应用领域也不同,二者功能互补,有接口。
(1)Saber和Simulink采用不同的仿真原理Saber可以进行建立在物理守恒定律的基础上的仿真,Saber的模型直接采用物理特性描述,其管脚对应于实际连接关系,如电管脚包括电压电流信息,机械管脚包括力和速度信息等。
此种物理模型直接反映了实际物理系统的状态,如负载对信号源的影响,负载之间彼此的影响等。
Simulink的仿真是建立在信号流的基础上的,一个连接只能表示一个信号,信号有方向性,无法直接表示负载效应、耦合等问题。
Saber也可以支持建立在信号流的基础上的仿真。
(2)Saber和Simulink擅长的应用领域不同Saber擅长进行实际物理硬件系统的仿真,如电源、数模混合电路,机电控制系统等。
可以很好的考虑负载特性、被控对象与控制部分的相互影响等。
Simulink擅长进行软件控制算法的仿真,可以很方便的建立算法模型,还可以自动生成代码,对控制系统算法设计非常有效。
(3)Saber-MatLab/Simulink 接口Saber与Matlab/Simulink的接口分为三个方面:命令行接口。
在Saber的CosmosScope中有Saberlink,可以直接起动Matlab命令行,与Matlab进行波形和数据的传输模型接口。
Saber可以读入Simulink的模型,在Saber中进行仿真协同仿真接口。
Saber可以与Simulink进行协同仿真,由Simulink仿真算法,Saber仿真硬件电路和执行部分,从而在软件设计过程中就可以验证算法的正确性。
2 推进系统仿真主要分为两个层面2.1器件级仿真器件级仿真主要研究器件的电气特性,例如逆变器缓冲电路对电压尖峰的抑制、输出滤波器对逆变器输出电压dv/dt的抑制、IGBT保护电路的特性等等。
器件级仿真要求器件特性和模型尽量准确仿真结果才有意义和参考性。
电力电子器件是现代推进系统电源的核心器件,只有电子电子器件模型建立的准确,对逆变电源的仿真研究才具有意义。
在MATLAB软件平台上,对电力电子器件的建模为理想性建模,例如IGBT,如图所示,只有拖尾电流、上升时间、关断时间等几个参数,而在SABER仿真平台上,所有的电力电子器件模型更加接近实际,例如IGBT的建模可以输入很多分布参数,如图x所示,这是IGBT的Date sheet 建模方法,它建模需要器件的参数数据,在SABER仿真平台上的另一种IGBT建模方法为开放式建模,如图x所示,此种建模方法可以更加准确的模拟实际IGBT的极间分布参数、拖尾电流特性、开通特性、关断特性等。
MATLAB 软件平台IGBT 的驱动是信号式驱动,即0为关,1为开通,IGBT 的开通时间与驱动电路无关;SABER 软件平台的驱动为实际电平信号,而且IGBT 的开通、关断时间与开通关断电阻相关,更接近实际;2.2系统级仿真准确预测和了解永磁电机驱动系统的性能,不仅需要准确的电机模型,同时还需要方便快捷的仿真平台,从而降低整个系统设计的工作量。
在选择适当的仿真平台后,还存在一个由数学语言向仿真语言转化的过程,以便最大程度的模拟实际系统的工作情况。
一些学者提出了很多的改进方法,但是由于仿真系统与实际系统相差较大,仿真结果的可信度受到质疑。
下面利用Matlab/Simulink 现有资源,采用自然变量分析法,对永磁电机建模原理和实现过程进行了详细阐释。
(1)电机数学方程磁链方程:cos cos(120)cos(120)A AA A AB B AC C f e B BA A BB B BC C f e C CA A CB B CC C f e L i M i M i M i L i M i M i M i L i ψψθψψθψψθ⎧=+++⎪⎪=+++-⎨⎪=++++⎪⎩o o (2-1)其中:A ψ、B ψ、C ψ——定子三相绕组磁链;AA L 、BB L 、CC L ——定子三相绕组自感系数;XY M ——定子X 绕组和Y 绕组的互感系数;f ψ——永磁磁极与定子绕组交链的最大磁链;e θ——转子电角定子绕组的自感系数AA L 、BB L 、CC L 和互感系数XY M 均为e θ的函数,且互感系数满足关系AB BA M M =、BC CB M M =、CA AC M M =。
电压方程:A A AB B BC C C d u ri dt d u ri dt d u ri dt ψψψ⎧=+⎪⎪⎪=+⎨⎪⎪=+⎪⎩(2-2)A u 、B u 、C u ——定子相电压;r ——定子相电阻;A i 、B i 、C i ——定子相电流。
(2)电机电路模型本节将阐述用电感、电阻等基本电路元件搭建电机模型的基本原理和实现方法。
由于电机本身可简化为电阻、电感等电路元件,因此与驱动系统的连接不需要进行任何变换,使用起来较为方便。
由于永磁电机完全通过适当的电路等效,因此称之为电路模型,该电机模型根据电压方程式和转子运动方程式,由以下五部分构成:1) 磁密分布函数:根据电机转子的位置计算各相绕组对应的气隙磁密;2) 反电动势计算环节:由电机转子的位置与转速及相应的K e ,计算反电动势;3) 电枢等效环节:由电阻、电感模拟电机绕组的电阻和电感,由受控电压源模拟电机转动时产生的反电势,反电势的大小由反电势计算环节确定;4) 电磁转矩计算环节:由转矩系数K T 、电流和磁密计算电机电磁转矩;5) 转子运动方程:本环节的核心是两个积分器,电机的速度根据运动方程计算,并通过再次积分得到电机转子的位置。
转子的初始位置由一个随机函数产生,以最大限度的模拟电机的实际情况。
按照实际驱动系统搭建基于Matlab/Simulink 的永磁电机驱动系统,主要由三个部分组成:1) 驱动系统主电路:本系统完全由Matlab/Power System 的库模块组成,因此具有建模方便,易于对电路局部结构和参数进行调整,便于观察系统的运行情况;2) 电机本体模型:构建永磁电机电路模型;3) 驱动控制器模型:通过逻辑比较和比例积分实现驱动控制器建模。
如上所述,永磁电机仿真模型通过按功能逐步分解模块化处理,不仅条理清楚便于理解和调整,同时也便于排除建模过程中出现的错误,大大缩短建模时间。
(3)电机的s 函数模型上面对永磁无刷直流电机的电路模型的建立过程和实现方法进行了详细阐述,在建模的工作中,我们作了许多假设,如忽略电机的凸极效应,认为电机的参数与转子的位置无关等,事实上样机的磁路并不对称。
下面将重点阐述利用Matlab 平台提供的S 函数接口建立更为准确的电机模型的原理和实现过程。
由于电机的特殊结构,在Matlab/Simulink库文件中没有现成的电机模型。
Matlab为用户提供了开发复杂模型的接口函数——S函数,S函数的编写可参考有关手册和帮助文件。
根据前述公式可编写永磁电机模型的S函数。
用S函数开发的模型,只有通过适当的方式与主回路模型连接起来,才能使仿真系统顺利运行。
一般文献中在用S函数建模时,通常未与主电路的连接,只是对电机本体进行仿真,这不仅没有充分发挥Matlab/Simulink的仿真能力,也不便于对整个驱动系统的运行情况进行分析,因此,电机本体与驱动电路的连接也是利用S函数电机模型的关键技术之一。
根据相关Matlab/Simulink技术资料,电机本体与主电路的连接方式:端点A、B、C和N分别是电机输入端和中点,直接与驱动主电路相连。
受控电流源使电机的相电流反馈到主回路,强迫电机电流与主回路电流相等。
测量端点m输出电机的各变量的变化情况,可接示波器。
驱动系统主电路和触发逻辑控制等与永磁电机的电路模型完全相同。
(4)两种建模方法的比较从仿真结果来看,永磁电机的电路模型和S函数模型的响应是接近的。
其中电流的波形很相似,为便于观察,对稳态响应的相电流曲线进行了放大处理。
看到两种模型的电流响应曲线是很相近的。
从转矩响应曲线来看,两种模型也比较接近,其中电路模型的电磁转矩略大,转速响应有超调。
总体说来两种电机模型是基本一致的。
通过仿真我们发现电路模型的仿真速度快的优点,通常比S函数模型快5~10倍左右。
S函数模型虽然仿真速度慢,但具有研究电机内部细节的能力。
两种模型相互补充,对了解整个系统的运行情况是大有裨益的。
从系统仿真的角度出发,电路模型就可以满足需求了;研究电机内部特性目前一般都已经采用时步有限元场路耦合的方法进行研究。
下面比较系统电路模型在MATLAB和SABER上实现的区别。
(5)基于MA TLAB和SABER系统模型比较在电路模型中,电机模型都采用相应元器件库中的电阻、电感、压控电压源模拟电机的定子电阻、电感、反电势,不同之处在于电机定子绕组的互感,在MA TLAB仿真平台上,采用压控电压源模拟互感的影响,在SABER仿真平台上,直接采用互感模型进行模拟。
当随着电机相数的增多SABER建模的方便程度越明显。
在MA TLAB平台下,仿真设定0.14s,计算时间28s,在SABER平台下,仿真设定0.14s,计算时间10.7s,3高级分析SABER仿真平台具有蒙特卡洛分析,可以指导电路设计和电路参数优化,而MA TLAB 目前还没有此项功能。