DFP算法及Matlab程序
优化方法大作业1
优化方法大作业一、Wolfe-Powell法利用MATLAB软件编写,其中初始值x0=-5;其他参数按照已知条件来取。
当b分别等于8、9、10时,均得到如下结果:而当初值x0变化时,则结果变化比较大,如将x0取-6,则计算结果如下:通过比较可以看出,b的取值对计算结果的影响较小,而初始值x0的取值则对结果影响很大。
从中也表明Wolfe-Powell准则的收敛条件比较弱,容易出现当函数还没取极小值而迭代循环已结束的情况。
具体代码见附录1.二、无约束优化1.DFP法精度ε = 0.02,确定λ使用的是一维非精确搜索算法(直接法,Wolfe-Powell准则)。
结果如下图所示:2. BFGS方法同上一种方法,精度ε = 0. 02,确定λ使用的是一维非精确搜索算法(直接法,Wolfe-Powell准则)。
结果如下图所示:比较两种方法,查看每一步的函数值,得出如下结果。
图1:DFP与BFGS法结果对比图通过图1与表1的比较,BFGS比DFP法最初收敛得更快,但是DFP法比BFGS法的最终结果更好。
DFP与BFGS法的代码分别见附录2、3。
三、Rockafellar乘子法文件myfun.m:function y=myfun(x)y=1000-x(1)^2-2*x(2)^2-x(3)^2-x(1)*x(2)-x(1)*x(3);文件mycon.m:function [c,ceq]=mycon(x)c(1)=(-x(1));c(2)=(-x(2));c(3)=(-x(3));ceq(1)=x(1)^2+x(2)^2+x(3)^2-25;ceq(2)=8*x(1)+14*x(2)+7*x(3)-56文件Q3.m:clearclcx0=[2 2 2]';[x,fval,exitflag,output]=fmincon(@myfun,x0,[],[],[],[],[],[],@mycon);附录1:%% Wolfe-Powell 准则方法clear;tic;c1=0.1;c2=0.65;a=0;b=8;syms x;f=x*x-2*x+7; %函数G0=jacobian(f,x);%求梯度x0=-6; %初始取x=-5% 由于只有一个未知数,默认S=1lambda = 1;x=x0;for k=1:1:1000f0 = eval(f); %求出函数值grad1= eval(G0); %求出梯度值figure1(k) = f0; % 用于绘出迭代过程中函数值变化x= x0+lambda;f1 = eval(f); %求出函数值grad2 = eval(G0); %求出梯度值value1 = f0 - f1 + c1* lambda * grad1 ;value2 = grad2 -c2*grad1 ;if value1 >=-1e-6 && value2 >=-1e-6disp('The variable matrix is : ');disp(x);fun=eval(f);fprintf('The minimum value of function is %f \n',fun);break; %如果满足两个条件,则退出循环。
Matlab中的非线性优化和非线性方程求解技巧
Matlab中的非线性优化和非线性方程求解技巧在科学和工程领域中,我们经常会遇到一些复杂的非线性问题,例如最优化问题和方程求解问题。
解决这些问题的方法主要分为线性和非线性等,其中非线性问题是相对复杂的。
作为一种强大的数值计算工具,Matlab提供了许多专门用于解决非线性优化和非线性方程求解的函数和方法。
本文将介绍一些常用的Matlab中的非线性优化和非线性方程求解技巧。
非线性优化是指在给定一些约束条件下,寻找目标函数的最优解的问题。
在实际应用中,往往需要根据实际情况给出一些约束条件,如等式约束和不等式约束。
Matlab中的fmincon函数可以用于求解具有约束条件的非线性优化问题。
其基本语法如下:[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub)其中,fun是目标函数,x0是初始值,A、b是不等式约束矩阵和向量,Aeq、beq是等式约束矩阵和向量,lb、ub是变量的上下边界。
x表示最优解,而fval表示最优解对应的目标函数值。
另外,非线性方程求解是指寻找使得方程等式成立的变量值的问题。
Matlab中提供的fsolve函数可以用于求解非线性方程。
其基本语法如下:x = fsolve(fun,x0)其中,fun是方程函数,x0是初始值,x表示方程的解。
除了fmincon和fsolve函数之外,Matlab还提供了一些其他的非线性优化和非线性方程求解函数,例如lsqnonlin、fminunc等,这些函数分别适用于无约束非线性优化问题和带约束非线性方程求解问题。
除了直接调用这些函数外,Matlab还提供了一些可视化工具和辅助函数来帮助我们更好地理解和解决非线性问题。
例如,使用Matlab的优化工具箱可以实现对非线性优化问题的求解过程可视化,从而更直观地观察到优化算法的收敛过程。
此外,Matlab还提供了一些用于计算梯度、雅可比矩阵和海塞矩阵的函数,这些函数在求解非线性问题时非常有用。
DFP
DFP 算法(微观)1. DFP 修正公式拟Newton 法首先要解决的问题是如何构造矩阵列{}k H ,使其满足条件(1)~(3):(1)k H 是对称正定矩阵(2)1+k H 由k H 经简单形式修正而得k k k E H H +=+1 (1-1)其中k E 称为修正矩阵,式(1-1)称为修正公式。
(3)k H 满足所谓的拟Newton 方程。
我们希望式(1-1)中的k E 有简单的形式。
考虑如下形式的修正矩阵T T k vv uu E βα+= (1-2)其中u ,v 为n 维待定向量。
由拟Newton 方程有k T k T k k k y vv y uu y H s βα++= (1-3)满足这个方程的待定向量u 和v 有无穷多种取法。
其中一个明显的取法是:令k s u =和k k y H v =,而α和β的值由1=k T y u α及1-=k Ty v β确定,利用k H 的对称性可导出公式: k T k T k k k k T k kT k k k k k s y s s y H y H y y H H H +-=+1 (1-4)称(1-4)式为DFP 修正公式。
2. DFP 算法算法2.1 给定控制误差ε,Step 1 给定初始点0x ,初始矩阵0H (通常取单位阵),计算0g ,令0=k 。
Step 2 令k k k g H p -=。
Step 3 由精确一维搜索确定步长k α,()()k k k k k p x f p x f min 0ααα+=+≥ (1-5) Step 4 令k k k k p x x α+=+1。
Step 5 若ε≤+1k g ,则1*+=k x x 停;否则令k k k x x s -=+1,k k k g g y -=+1 (1-6)Step 6 由DFP 修正公式(1-4)式得,1+k H ,令1+=k k ,转Step 2。
3. DFP 算法具有的重要性质(1)对于正定二次函数:(i )至多经过n 次迭代即终止,且1-=G H n ;(ii )保持满足前面的拟Newton 方程 1-i ,0,1,j , ==j j i s y H (1-7)(iii )产生的搜索方向是共轭方向。
DFP算法+wolfe性非线性搜索解决无约束问题的matlab程序
alpha=min([2*alpha, (b+alpha)/2]);
continue;
end
break;
end
x=x0+alpha*dk;
sk=x-x0; yk=feval(gfun,x)-gk;
if(sk'*yk>0)
Hk=Hk-(Hk*yk*yk'*Hk)/(yk'*Hk*yk)+(sk*sk')/(sk'*yk);
批注本地保存成功开通会员云端永久保存去开通
function [x,val,k]=dfp(fun,gfun,x0)
%功能:用DFP算法求解无约束问题:min f(x)
%输入: x0是初始点,fun, gfun分别是目标函数及其梯度
%输出: x, val分别是近似最优点和最优值, k是迭代次数
maxk=1e5;
dk=-Hk*gk; %解方程组,计算搜索方向
while(1)
if(feval(fun,x0+alpha*dk)<=feval(fun,x0)+rho*alpha*gk'*dk)
b=alpha;
alpha=(alpha+a)/2;
continue;
end
if(feval(gfun,x0+alpha*dk)'*dk>=sigma*gk'*dk)
clear
x0=[0,0]';
[x,val,k]=dfp(Fra bibliotekfun','gfun',x0)
end
k=k+1; x0=x;
end
val=feval(fun,x0);
matlab图论程序算法大全
图论算法matlab实现求最小费用最大流算法的 MATLAB 程序代码如下:n=5;C=[0 15 16 0 00 0 0 13 140 11 0 17 00 0 0 0 80 0 0 0 0]; %弧容量b=[0 4 1 0 00 0 0 6 10 2 0 3 00 0 0 0 20 0 0 0 0]; %弧上单位流量的费用wf=0;wf0=Inf; %wf 表示最大流量, wf0 表示预定的流量值for(i=1:n)for(j=1:n)f(i,j)=0;end;end %取初始可行流f 为零流while(1)for(i=1:n)for(j=1:n)if(j~=i)a(i,j)=Inf;end;end;end%构造有向赋权图for(i=1:n)for(j=1:n)if(C(i,j)>0&f(i,j)==0)a(i,j)=b(i,j); elseif(C(i,j)>0&f(i,j)==C(i,j))a(j,i)=-b(i,j);elseif(C(i,j)>0)a(i,j)=b(i,j);a(j,i)=-b(i,j);end;end;end for(i=2:n)p(i)=Inf;s(i)=i;end %用Ford 算法求最短路, 赋初值for(k=1:n)pd=1; %求有向赋权图中vs 到vt 的最短路for(i=2:n)for(j=1:n)if(p(i)>p(j)+a(j,i))p(i)=p(j)+a(j,i);s( i)=j;pd=0;end;end;endif(pd)break;end;end %求最短路的Ford 算法结束if(p(n)==Inf)break;end %不存在vs 到vt 的最短路, 算法终止. 注意在求最小费用最大流时构造有向赋权图中不会含负权回路, 所以不会出现k=ndvt=Inf;t=n; %进入调整过程, dvt 表示调整量while(1) %计算调整量if(a(s(t),t)>0)dvtt=C(s(t),t)-f(s(t),t); %前向弧调整量elseif(a(s(t),t)<0)dvtt=f(t,s(t));end %后向弧调整量if(dvt>dvtt)dvt=dvtt;endif(s(t)==1)break;end %当t 的标号为vs 时, 终止计算调整量t=s(t);end %继续调整前一段弧上的流fpd=0;if(wf+dvt>=wf0)dvt=wf0-wf;pd=1;end%如果最大流量大于或等于预定的流量值t=n;while(1) %调整过程if(a(s(t),t)>0)f(s(t),t)=f(s(t),t)+dvt; %前向弧调整elseif(a(s(t),t)<0)f(t,s(t))=f(t,s(t))-dvt;end %后向弧调整if(s(t)==1)break;end %当t 的标号为vs 时, 终止调整过程t=s(t);endif(pd)break;end%如果最大流量达到预定的流量值wf=0; for(j=1:n)wf=wf+f(1,j);end;end %计算最大流量zwf=0;for(i=1:n)for(j=1:n)zwf=zwf+b(i,j)*f(i,j);end;end%计算最小费用f %显示最小费用最大流图 6-22wf %显示最小费用最大流量zwf %显示最小费用, 程序结束__Kruskal 避圈法:Kruskal 避圈法的MATLAB 程序代码如下:n=8;A=[0 2 8 1 0 0 0 02 0 6 0 1 0 0 08 6 0 7 5 1 2 01 0 7 0 0 0 9 00 1 5 0 0 3 0 80 0 1 0 3 0 4 60 0 2 9 0 4 0 30 0 0 0 8 6 3 0];k=1; %记录A中不同正数的个数for(i=1:n-1)for(j=i+1:n) %此循环是查找A中所有不同的正数if(A(i,j)>0)x(k)=A(i,j); %数组x 记录A中不同的正数kk=1; %临时变量for(s=1:k-1)if(x(k)==x(s))kk=0;break;end;end %排除相同的正数k=k+kk;end;end;endk=k-1 %显示A中所有不同正数的个数for(i=1:k-1)for(j=i+1:k) %将x 中不同的正数从小到大排序if(x(j)<x(i))xx=x(j);x(j)=x(i);x(i)=xx;end;end;endT(n,n)=0; %将矩阵T 中所有的元素赋值为0q=0; %记录加入到树T 中的边数for(s=1:k)if(q==n)break;end %获得最小生成树T, 算法终止for(i=1:n-1)for(j=i+1:n)if(A(i,j)==x(s))T(i,j)=x(s);T(j,i)=x(s); %加入边到树T 中TT=T; %临时记录Twhile(1)pd=1; %砍掉TT 中所有的树枝for(y=1:n)kk=0;for(z=1:n)if(TT(y,z)>0)kk=kk+1;zz=z;end;end %寻找TT 中的树枝if(kk==1)TT(y,zz)=0;TT(zz,y)=0;pd=0;end;end %砍掉TT 中的树枝if(pd)break;end;end %已砍掉了TT 中所有的树枝pd=0; %判断TT 中是否有圈for(y=1:n-1)for(z=y+1:n)if(TT(y,z)>0)pd=1;break;end;end;end if(pd)T(i,j)=0;T(j,i)=0; %假如TT 中有圈else q=q+1;end;end;end;end;endT %显示近似最小生成树T, 程序结束用Warshall-Floyd 算法求任意两点间的最短路.n=8;A=[0 2 8 1 Inf Inf Inf Inf2 0 6 Inf 1 Inf Inf Inf8 6 0 7 5 1 2 Inf1 Inf 7 0 Inf Inf 9 Inf Inf 1 5 Inf 0 3 Inf 8 Inf Inf 1 Inf 3 0 4 6Inf Inf 2 9 Inf 4 0 3Inf Inf Inf Inf 8 6 3 0]; % MATLAB 中, Inf 表示∞D=A; %赋初值for(i=1:n)for(j=1:n)R(i,j)=j;end;end %赋路径初值for(k=1:n)for(i=1:n)for(j=1:n)if(D(i,k)+D(k,j)<D(i,j))D(i,j )=D(i,k)+D(k,j); %更新dijR(i,j)=k;end;end;end %更新rijk %显示迭代步数D %显示每步迭代后的路长R %显示每步迭代后的路径pd=0;for i=1:n %含有负权时if(D(i,i)<0)pd=1;break;end;end %存在一条含有顶点vi 的负回路if(pd)break;end %存在一条负回路, 终止程序end %程序结束利用 Ford--Fulkerson 标号法求最大流算法的MATLAB 程序代码如下:n=8;C=[0 5 4 3 0 0 0 00 0 0 0 5 3 0 00 0 0 0 0 3 2 00 0 0 0 0 0 2 00 0 0 0 0 0 0 40 0 0 0 0 0 0 30 0 0 0 0 0 0 50 0 0 0 0 0 0 0]; %弧容量for(i=1:n)for(j=1:n)f(i,j)=0;end;end %取初始可行流f 为零流for(i=1:n)No(i)=0;d(i)=0;end %No,d 记录标号图 6-19while(1)No(1)=n+1;d(1)=Inf; %给发点vs 标号while(1)pd=1; %标号过程for(i=1:n)if(No(i)) %选择一个已标号的点vifor(j=1:n)if(No(j)==0&f(i,j)<C(i,j)) %对于未给标号的点vj, 当vivj 为非饱和弧时No(j)=i;d(j)=C(i,j)-f(i,j);pd=0;if(d(j)>d(i))d(j)=d(i);endelseif(No(j)==0&f(j,i)>0) %对于未给标号的点vj, 当vjvi 为非零流弧时No(j)=-i;d(j)=f(j,i);pd=0;if(d(j)>d(i))d(j)=d(i);end;end;end;end;endif(No(n)|pd)break;end;end%若收点vt 得到标号或者无法标号, 终止标号过程if(pd)break;end %vt 未得到标号, f 已是最大流, 算法终止dvt=d(n);t=n; %进入调整过程, dvt 表示调整量while(1)if(No(t)>0)f(No(t),t)=f(No(t),t)+dvt; %前向弧调整elseif(No(t)<0)f(No(t),t)=f(No(t),t)-dvt;end %后向弧调整if(No(t)==1)for(i=1:n)No(i)=0;d(i)=0; end;break;end %当t 的标号为vs 时, 终止调整过程t=No(t);end;end; %继续调整前一段弧上的流fwf=0;for(j=1:n)wf=wf+f(1,j);end %计算最大流量f %显示最大流wf %显示最大流量No %显示标号, 由此可得最小割, 程序结束图论程序大全程序一:关联矩阵和邻接矩阵互换算法function W=incandadf(F,f)if f==0m=sum(sum(F))/2;n=size(F,1);W=zeros(n,m);k=1;for i=1:nfor j=i:nif F(i,j)~=0W(i,k)=1;W(j,k)=1;k=k+1;endendendelseif f==1m=size(F,2);n=size(F,1);W=zeros(n,n);for i=1:ma=find(F(:,i)~=0);W(a(1),a(2))=1;W(a(2),a(1))=1;endelsefprint('Please imput the right value of f');endW;程序二:可达矩阵算法function P=dgraf(A) n=size(A,1);P=A;for i=2:nP=P+A^i;endP(P~=0)=1;P;程序三:有向图关联矩阵和邻接矩阵互换算法function W=mattransf(F,f)if f==0m=sum(sum(F));n=size(F,1);W=zeros(n,m);k=1;for i=1:nfor j=i:nif F(i,j)~=0W(i,k)=1;W(j,k)=-1;k=k+1;endendendelseif f==1m=size(F,2);n=size(F,1);W=zeros(n,n);for i=1:ma=find(F(:,i)~=0);if F(a(1),i)==1W(a(1),a(2))=1;elseW(a(2),a(1))=1;endendelsefprint('Please imput the right value of f');endW;第二讲:最短路问题程序一:Dijkstra算法(计算两点间的最短路)function [l,z]=Dijkstra(W)n = size (W,1); for i = 1 :nl(i)=W(1,i);z(i)=0;endi=1;while i<=nfor j =1 :nif l(i)>l(j)+W(j,i)l(i)=l(j)+W(j,i);z(i)=j-1;if j<ii=j-1;endendendi=i+1;end程序二:floyd算法(计算任意两点间的最短距离)function [d,r]=floyd(a)n=size(a,1);d=a;for i=1:nfor j=1:nr(i,j)=j;endendr;for k=1:nfor i=1:nfor j=1:nif d(i,k)+d(k,j)<d(i,j)d(i,j)=d(i,k)+d(k,j);r(i,j)=r(i,k);endendendend程序三:n2short.m 计算指定两点间的最短距离function [P u]=n2short(W,k1,k2)n=length(W);U=W;m=1;while m<=nfor i=1:nfor j=1:nif U(i,j)>U(i,m)+U(m,j)U(i,j)=U(i,m)+U(m,j);endendendm=m+1;endu=U(k1,k2);P1=zeros(1,n);k=1;P1(k)=k2;V=ones(1,n)*inf;kk=k2;while kk~=k1for i=1:nV(1,i)=U(k1,kk)-W(i,kk);if V(1,i)==U(k1,i)P1(k+1)=i;kk=i;k=k+1;endendendk=1;wrow=find(P1~=0);for j=length(wrow):-1:1P(k)=P1(wrow(j));k=k+1;endP;程序四、n1short.m(计算某点到其它所有点的最短距离)function[Pm D]=n1short(W,k)n=size(W,1);D=zeros(1,n);for i=1:n[P d]=n2short(W,k,i);Pm{i}=P;D(i)=d;end程序五:pass2short.m(计算经过某两点的最短距离)function [P d]=pass2short(W,k1,k2,t1,t2)[p1 d1]=n2short(W,k1,t1);[p2 d2]=n2short(W,t1,t2);[p3 d3]=n2short(W,t2,k2);dt1=d1+d2+d3;[p4 d4]=n2short(W,k1,t2);[p5 d5]=n2short(W,t2,t1);[p6 d6]=n2short(W,t1,k2);dt2=d4+d5+d6;if dt1<dt2d=dt1;P=[p1 p2(2:length(p2)) p3(2:length(p3))];elsed=dt1;p=[p4 p5(2:length(p5)) p6(2:length(p6))];endP;d;第三讲:最小生成树程序一:最小生成树的Kruskal算法function [T c]=krusf(d,flag)if nargin==1n=size(d,2);m=sum(sum(d~=0))/2;b=zeros(3,m);k=1;for i=1:nfor j=(i+1):nif d(i,j)~=0b(1,k)=i;b(2,k)=j;b(3,k)=d(i,j);k=k+1;endendendelseb=d;endn=max(max(b(1:2,:)));m=size(b,2);[B,i]=sortrows(b',3);B=B';c=0;T=[];k=1;t=1:n;for i=1:mif t(B(1,i))~=t(B(2,i))T(1:2,k)=B(1:2,i);c=c+B(3,i);k=k+1;tmin=min(t(B(1,i)),t(B(2,i)));tmax=max(t(B(1,i)),t(B(2,i)));for j=1:nif t(j)==tmaxt(j)=tmin;endendendif k==nbreak;endendT;c;程序二:最小生成树的Prim算法function [T c]=Primf(a)l=length(a);a(a==0)=inf;k=1:l;listV(k)=0;listV(1)=1;e=1;while (e<l)min=inf;for i=1:lif listV(i)==1for j=1:lif listV(j)==0 & min>a(i,j)min=a(i,j);b=a(i,j);s=i;d=j;endendendendlistV(d)=1;distance(e)=b;source(e)=s;destination(e)=d;e=e+1;endT=[source;destination]; for g=1:e-1c(g)=a(T(1,g),T(2,g));endc;另外两种程序最小生成树程序1(prim 算法构造最小生成树)a=[inf 50 60 inf inf inf inf;50 inf inf 65 40 inf inf;60 inf inf 52 inf inf 45;...inf 65 52 inf 50 30 42;inf 40 inf 50 inf 70 inf;inf inf inf 30 70 inf inf;...inf inf 45 42 inf inf inf];result=[];p=1;tb=2:length(a);while length(result)~=length(a)-1temp=a(p,tb);temp=temp(:);d=min(temp);[jb,kb]=find(a(p,tb)==d);j=p(jb(1));k=tb(kb(1));result=[result,[j;k;d]];p=[p,k];tb(find(tb==k))=[];endresult最小生成树程序2(Kruskal 算法构造最小生成树)clc;clear;a(1,2)=50; a(1,3)=60; a(2,4)=65; a(2,5)=40;a(3,4)=52;a(3,7)=45; a(4,5)=50; a(4,6)=30;a(4,7)=42; a(5,6)=70;[i,j,b]=find(a);data=[i';j';b'];index=data(1:2,:);loop=max(size(a))-1;result=[];while length(result)<looptemp=min(data(3,:));flag=find(data(3,:)==temp);flag=flag(1);v1=data(1,flag);v2=data(2,flag);if index(1,flag)~=index(2,flag)result=[result,data(:,flag)];endindex(find(index==v2))=v1;data(:,flag)=[];index(:,flag)=[];endresult第四讲:Euler图和Hamilton图程序一:Fleury算法(在一个Euler图中找出Euler环游)注:包括三个文件;fleuf1.m, edf.m, flecvexf.mfunction [T c]=fleuf1(d)%注:必须保证是Euler环游,否则输出T=0,c=0 n=length(d);b=d;b(b==inf)=0;b(b~=0)=1;m=0;a=sum(b);eds=sum(a)/2;ed=zeros(2,eds);vexs=zeros(1,eds+1);matr=b;for i=1:nif mod(a(i),2)==1m=m+1;endendif m~=0fprintf('there is not exit Euler path.\n')T=0;c=0;endif m==0vet=1;flag=0;t1=find(matr(vet,:)==1);for ii=1:length(t1)ed(:,1)=[vet,t1(ii)];vexs(1,1)=vet;vexs(1,2)=t1(ii);matr(vexs(1,2),vexs(1,1))=0;flagg=1;tem=1;while flagg[flagg ed]=edf(matr,eds,vexs,ed,tem); tem=tem+1;if ed(1,eds)~=0 & ed(2,eds)~=0T=ed;T(2,eds)=1;c=0;for g=1:edsc=c+d(T(1,g),T(2,g));endflagg=0;break;endendendendfunction[flag ed]=edf(matr,eds,vexs,ed,tem)flag=1;for i=2:eds[dvex f]=flecvexf(matr,i,vexs,eds,ed,tem);if f==1flag=0;break;endif dvex~=0ed(:,i)=[vexs(1,i) dvex];vexs(1,i+1)=dvex;matr(vexs(1,i+1),vexs(1,i))=0;elsebreak;endendfunction [dvex f]=flecvexf(matr,i,vexs,eds,ed,temp) f=0;edd=find(matr(vexs(1,i),:)==1);dvex=0;dvex1=[];ded=[];if length(edd)==1dvex=edd;elsedd=1;dd1=0;kkk=0;for kk=1:length(edd)m1=find(vexs==edd(kk));if sum(m1)==0dvex1(dd)=edd(kk);dd=dd+1;dd1=1;elsekkk=kkk+1;endendif kkk==length(edd)tem=vexs(1,i)*ones(1,kkk);edd1=[tem;edd];for l1=1:kkklt=0;ddd=1;for l2=1:edsif edd1(1:2,l1)==ed(1:2,l2)lt=lt+1;endendif lt==0ded(ddd)=edd(l1); ddd=ddd+1;endendendif temp<=length(dvex1)dvex=dvex1(temp);elseif temp>length(dvex1) & temp<=length(ded)dvex=ded(temp);elsef=1;endend程序二:Hamilton改良圈算法(找出比较好的Hamilton路)function [C d1]= hamiltonglf(v)%d表示权值矩阵%C表示算法最终找到的Hamilton圈。
数值分析中求解非线性方程的MATLAB求解程序
数值分析中求解非线性方程的MATLAB求解程序1. fzero函数:fzero函数是MATLAB中最常用的求解非线性方程的函数之一、它使用了割线法、二分法和反复均值法等多种迭代算法来求解方程。
使用fzero函数可以很方便地求解单变量非线性方程和非线性方程组。
例如,要求解方程f(x) = 0,可以使用以下语法:``````2. fsolve函数:fsolve函数是MATLAB中求解多维非线性方程组的函数。
它是基于牛顿法的迭代算法来求解方程组。
使用fsolve函数可以非常方便地求解非线性方程组。
例如,要求解方程组F(x) = 0,可以使用以下语法:``````3. root函数:root函数是MATLAB中求解非线性方程组的函数之一、它采用牛顿法或拟牛顿法来求解方程组。
使用root函数可以非常方便地求解非线性方程组。
例如,要求解方程组F(x) = 0,可以使用以下语法:``````4. vpasolve函数:vpasolve函数是MATLAB中求解符号方程的函数。
它使用符号计算的方法来求解方程,可以得到精确的解。
vpasolve函数可以求解多变量非线性方程组和含有符号参数的非线性方程。
例如,要求解方程组F(x) = 0,可以使用以下语法:```x = vpasolve(F(x) == 0, x)```vpasolve函数会返回方程组的一个精确解x。
5. fsolve和lsqnonlin结合:在MATLAB中,可以将求解非线性方程转化为求解最小二乘问题的形式。
可以使用fsolve函数或lsqnonlin函数来求解最小二乘问题。
例如,要求解方程f(x) = 0,可以将其转化为最小二乘问题g(x) = min,然后使用fsolve或lsqnonlin函数来求解。
具体使用方法可以参考MATLAB官方文档。
6. Newton-Raphson法手动实现:除了使用MATLAB中的函数来求解非线性方程,还可以手动实现Newton-Raphson法来求解。
BFGS和DFP法的最优化问题求解及在MATLAB中的实现[1]
![BFGS和DFP法的最优化问题求解及在MATLAB中的实现[1]](https://img.taocdn.com/s3/m/3831ab92bceb19e8b8f6baf9.png)
BFGS 方法和 DFP 方法对非线性无约束优化问题进行了仿真研究 , 结果表明利用 matlab 软件解答非线性无约束优化问题获得 了好的效果, 为数学工作者求解非线性无约束优化问题提供了一种新的方法 . 关键词:matlab 软件; 数学建模; BFGS 算法; DFP 算法; 最优解 中图分类号:TB112 文献标识码:A 文章编号:1008 - 4681 ( 2012 ) 05 - 0001 - 03 DFP 算法的一般计算步骤如下 : dk = - ( Bk )
3 1 3 1 2 2 2
ans = 0. 0027 - 0. 0003 - 0. 0057 - 0. 0057 % 采用立方插值法 options( 6 ) = 0 ; Options( 7 ) = 1 ; fminunc ( ‘pfun’ , x0 ,Options) ans = - 0. 0156 0. 0015 - 0. 0146 - 0. 0146 DFP 方法 % 采用混合插值法 options( 6 ) = 1 ; Options( 7 ) = 0 ; fminunc ( ‘pfun’ , x0 ,Options)
[1 , 2 ]
gk
x k +1 = x k + a k d k B k +1 = B k -
T yk 2 Bk sk yT sT B s k + yk sk Bk 2 + 1 + kT k k · T T sk yk sk yk sk yk
(
)
a k 为步长因子, 其中 s k = a k d k ; y k = g k +1 - g k , 它由具体的线 搜索准则确定. Goldstein - Armijor 线搜索下的 DFP 算法 B1 ∈ Rn* n 且对称正定, k = 1; 步骤 1 : 取 x1 ∈ Rn, 步骤 2 : 计算 g k = f( x k ) , 如果 g k = 0 , 则终止, 最优解 为 x k ; 如果 g k ≠ 0 , 令 dk = - ( Bk )
最优化方法-课程设计报告-运用DFP算法解决无约束最优化问题
北方民族大学课程设计报告系(部、中心)信息与计算科学学院专业信息与计算科学班级 09信计(3)班小组成员课程名称最优化方法设计题目名称运用DFP算法解决无约束最优化问题提交时间2012年6月26日成绩指导教师变尺度法是在牛顿法的基础上发展起来的,它和梯度法亦有密切关系.变尺度法避免了Newton法在每次迭代都要计算目标函数的Hesse矩阵和它的逆矩阵而导致随问题的维数增加计算量迅速增加.DFP算法是变尺度法中一个非常好的算法.DFP算法首先是1959年由Davidon提出的后经Fletcher和Powell改进,故名之为DFP算法,它也是求解无约束优化问题最有效的算法之一.DFP变尺度法综合了梯度法、牛顿法的优点而又避弃它们各自的缺点,只需计算一阶偏导数,无需计算二阶偏导数及其逆矩阵,对目标函数的初始点选择均无严格要求,收敛速度快.本文主要分析DFP算法原理及运用Matalb软件编程解决实际数学问题.最后运算结果符合计算精度且只用了一次迭代,由此可见收敛速度快.关键词:Newton法变尺度法Hesse矩阵Matlab软件一、课程设计目的 (4)二、课程设计要求 (4)三、课程设计原理 (4)(1)变尺度法基本原理 (4)(2)DFP算法 (5)四、实验内容 (6)五、数学建模及求解 (7)1.DFP算法迭代步骤 (7)2.DFP算法的流程图 (7)六、程序实现 (8)七、数值实验的结果与分析 (11)八、实验总结与体会 (12)1.DFP公式恒有确切解 (12)2.DFP算法的稳定性 (12)参考文献 (13)一、 课程设计目的:1、掌握无约束优化问题DFP 算法的数值求解思路;2、训练分析DFP 算法的运算存储量及收敛速度的能力,了解算法的优缺点;3、通过运用DFP 算法求解实际无约束优化问题的意义;4、熟悉应用Matlab 求解无约束最优化问题的编程方法.二、 课程设计要求熟悉了解DFP 算法原理及求解无约束优化问题的步骤,并运用Matlab 件编程实现求解问题.三、 课程设计原理(1)变尺度法基本原理在Newton 法中,基本迭代公式k k k k P t X X +=+1,其中,1=k t ,)()]([12k k k X f X f P ∇∇-=-,于是有2,1,0,11=-=-+k g G X X k k k k (1)其中0X 是初始点,k g 和k G 分别是目标函数)(X f 在点k X 的梯度和Hesse 矩阵.为了消除这个迭代公式中的Hesse 逆矩阵1-k G ,可用某种近似矩阵)(k k X H H =来替换它,即构造一个矩阵序列}{k H 去逼近Hesse 逆矩阵序列}{1-k G此时式(1)变为k k k k g H X X -=+1事实上,式中k k k g H P -=无非是确定了第k 次迭代的搜索方向,为了取得更大的灵活性,我们考虑更一般的的迭代公式k k k k k g H t X X -=+1 (2)其中步长因子k t 通过从k X 出发沿k k k g H P -=作直线搜索来确定.式(2)是代表很长的一类迭代公式.例如,当I H k ≡(单位矩阵)时,它变为最速下降法的迭代公式.为使kH确实与1-k G 近似并且有容易计算的特点,必须对k H 附加某些条件:第一,为保证迭代公式具有下降性质,要求}{k H 中的每一个矩阵都是对称正定的.理由是,为使搜索方向k k k g H P -=是下降方向,只要0<-=-k k T k k T k g H g P g成立即可,即0>k k T k g H g成立.当k H 对称正定时,此公式必然成立,从而保证式(2)具有下降性质.第二,要求k H 之间的迭代具有简单形式.显然,k k k E H H +=+1 (3)是最简单的形式了.其中k E 称为校正矩阵,式(3)称为校正公式.第三,必须满足拟Newton 条件.即:)()(111k k k k k X X g g H -=-+++ (4)为了书写方便也记k k k g g y -=+1k k k X X S -=+1于是拟Newton 条件可写为k k k S y H =+1 (5)有式(3)和(5)知,k E 必须满足k k k k S y E H =+)(或k k k k k y H S y E == (6)(2)DFP 算法DFP 校正是第一个拟牛顿校正是1959年由Davidon 提出的后经Fletcher 和Powell 改进故名之为DFP 算法它也是求解无约束优化问题最有效的算法之一.DFP 算法基本原理考虑如下形式的校正公式T k k k T k k k k k V V U U H H βα++=+1 (7)其中k k V U ,是特定n 维向量,k k βα,是待定常数.这时,校正矩阵是T k k k T k k k k V V U U E βα+=.现在来确定k E .根据拟Newton 条件,k E 必须满足(6),于是有k k k k T k k k T k k k y H S y V V U U -=+)(βα或k k k k T k k k k T k k k y H S y V V y U U -=+βα.满足这个方程的待定向量k U 和k V 有无穷多种取法,下面是其中的一种:k k T k k k S y U U =α,k k k T k k k y H y V V -=β注意到k T ky U 和k T k y V 都是数量,不妨取 k k S U =,k k k y H V =,同时定出k T k k y S 1=α,kk T k k y H y 1-=β. 将这两式代回(5.32)得 kk T k k T k k k k T k T k k k k y H y H y y H y S S S H H -+=+1. (8) 这就是DFP 校正公式.四、 实验内容采用课本P102页例5.3和P107页例5.4进行数值计算;1,求22212125),(m in x x x x f +=,取初始点T X ]2,2[0=.2,求2221214),(m in x x x x f +=,取初始点T X ]1,1[0=.五、 数学建模及求解1.DFP 算法迭代步骤在拟Newton 算法中,只要把第五步改为计算式(8)而其他不变,该算法就是DFP 算法了.但是由于计算中舍去误差的影响,特别是直线搜索不精确的影响,可能要破坏迭代矩阵k H 的正定性,从而导致算法失效.为保证k H 的正定性,采取以下重置措施:迭代1+n 次后,重置初始点和迭代矩阵,即I H X X n ==+010,以后重新迭代.已知目标函数)(X f 及其梯度)(X g ,问题的维数n ,终止限ε.(1) 选定初始点.计算)(00X f f =,)(00X g g =.(2) 置I H =0,00g P -=,0=k .(3) 作直线搜索),(1k k k P X ls X =+;计算)(11++=k k X f f ,)(11++=k k X g g .(4) 判别终止准则是否满足:若满足,则打印),(11++k k f X ,结束;否转(5).(5) 若n k =,则置10+=k X X ,10+=k f f ,10+=k g g ,转(2);否则转(6).(6) 计算k k k X X S -=+1,k k k g g y -=+1,kk T k k T k k k k T k T k k k k y H y H y y H y S S S H H -+=+1, 111+++-=k k k g H P ,置1+=k k ,转(3).2.DFP 算法的流程图六、程序实现七、 数值实验的结果与分析由上述运行结果可得出:第一题迭代一次就解得:]0664.0,2220.0[*0150.1---=e X 与精确解]0,0[=X 误差远小于610-=ε,符合要求.第二题同样迭代一次就解得:]0555.0,1110.0[*0150.1--=e X 与精确解]0,0[=X误差远小于610-=ε,符合要求.且所计算的k H 矩阵和梯度与精确计算所得一样,这也表明DFP 算法的matalb 程序完全符合要求.八、 实验总结与体会DFP 变尺度法综合了梯度法、牛顿法的优点而又避弃它们各自的缺点,只需计算一阶偏导数,无需计算二阶偏导数及其逆矩阵,对目标函数的初始点选择均无严格要求,收敛速度快,这些良好的性能已作阐述。
MATLAB的常用应用总结
§7 MATLAB 的应用7.1 MATLAB 在数值分析中的应用插值与拟合是来源于实际、又广泛应用于实际的两种重要方法。
随着计算机的不断发展及计算水平的不断提高,它们已在国民生产和科学研究等方面扮演着越来越重要的角色。
下面对插值中分段线性插值、拟合中的最为重要的最小二乘法拟合加以介绍。
7.1.1 分段线性插值所谓分段线性插值就是通过插值点用折线段连接起来逼近原曲线,这也是计算机绘制图形的基本原理。
实现分段线性插值不需编制函数程序,MA TLAB 自身提供了内部函数interp1其主要用法如下:interp1(x,y,xi) 一维插值◆ yi=interp1(x,y,xi)对一组点(x,y) 进行插值,计算插值点xi 的函数值。
x 为节点向量值,y 为对应的节点函数值。
如果y 为矩阵,则插值对y 的每一列进行,若y 的维数超出x 或 xi 的维数,则返回NaN 。
◆ yi=interp1(y,xi)此格式默认x=1:n ,n 为向量y 的元素个数值,或等于矩阵y 的size(y,1)。
◆ yi=interp1(x,y,xi,’method’)method 用来指定插值的算法。
默认为线性算法。
其值常用的可以是如下的字符串。
● nearest 线性最近项插值。
● linear 线性插值。
● spline 三次样条插值。
● cubic 三次插值。
所有的插值方法要求x 是单调的。
x 也可能并非连续等距的。
正弦曲线的插值示例:>> x=0:0.1:10;>> y=sin(x);>> xi=0:0.25:10;>> yi=interp1(x,y,xi);>> plot(x,y,’0’,xi,yi)则可以得到相应的插值曲线(读者可自己上机实验)。
Matlab 也能够完成二维插值的运算,相应的函数为interp2,使用方法与interpl 基本相同,只是输入和输出的参数为矩阵,对应于二维平面上的数据点,详细的用法见Matlab 联机帮助。
Matlab数学规划方法及实验题目
MATLAB数学规划问题(实验题目及答案在最后)一、线性规划线性规划问题是目标函数和约束条件均为线性函数的问题,MATLAB6.0及更高版本解决的线性规划问题的标准形式为:min n R',f∈xxsub.to:b⋅A≤x⋅Aeq=xbeq≤lb≤xub其中f、x、b、beq、lb、ub为向量,A、Aeq为矩阵。
其它形式的线性规划问题都可经过适当变换化为此标准形式。
在MATLAB6.0版中,线性规划问题(Linear Programming)已用函数linprog取代了MATLAB5.x版中的lp函数。
在6.0和7.0中依然可以使用lp 函数,但在更高版本中,就只能使用linprog函数了。
函数linprog调用格式:x=linprog(f,A,b)x=linprog(f,A,b,Aeq,beq)- 1 -- 1 -x=linprog(f,A,b,Aeq,beq,lb,ub) x=linprog(f,A,b,Aeq,beq,lb,ub,x0) x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options) [x,fval]=linprog(…)[x, fval, exitflag]=linprog(…) [x, fval, exitflag, output]=linprog(…)[x, fval, exitflag, output, lambda]=linprog(…) 说明:x=linprog(f, A, b) %求min f ' *x, sub.to b x A ≤⋅线性规划的最优解。
返回值x 为最优解向量。
x=linprog(f, A, b, Aeq, beq) %含有等式约束beq x Aeq =⋅,若没有不等式约束b x A ≤⋅,则令A=[ ],b=[ ]。
x = linprog(f, A, b, Aeq, beq, lb, ub) %指定x 的范围ub x lb ≤≤ x=linprog(f, A, b, Aeq, beq, lb, ub, x0) %设置x0为初值点。
MATLAB算法

MATLAB算法以下是一些常见的MATLAB算法:1.插值算法:MATLAB提供了多种插值算法,如线性插值、二次插值和三次样条插值等。
这些算法可以用于填充缺失的数据、重建误差数据和生成平滑曲线等。
2.傅立叶变换:MATLAB提供了一系列用于计算傅立叶变换和逆变换的函数,包括快速傅立叶变换(FFT)算法。
傅立叶变换可以将信号从时域转换到频域,用于频谱分析、滤波和信号压缩等应用。
3.矩阵运算:MATLAB的核心功能是矩阵运算。
它提供了各种矩阵运算函数,如矩阵乘法、矩阵求逆、特征值分解和奇异值分解等。
这些算法可以用于解线性方程组、计算矩阵的特征向量和特征值等。
4.优化算法:MATLAB包含了多种优化算法,如梯度下降、共轭梯度、遗传算法和线性规划等。
这些算法可以用于最小化或最大化目标函数,在工程和经济领域有着广泛的应用。
5.数值积分:MATLAB提供了多种数值积分算法,如梯形法则、辛普森法则和龙贝格积分法。
这些算法可以用于计算函数的定积分,求解微分方程和模拟连续系统等。
6.图像处理:MATLAB拥有丰富的图像处理工具箱,包括图像滤波、边缘检测、图像变换和特征提取等。
这些算法可以用于图像增强、图像恢复和图像分析等应用。
7.机器学习算法:MATLAB提供了多种机器学习算法,如支持向量机、神经网络和决策树等。
这些算法可以用于模式识别、数据挖掘和预测分析等应用。
8.信号处理算法:MATLAB提供了多种信号处理算法,如滤波、谱估计和自适应滤波等。
这些算法可以用于音频处理、语音识别和信号压缩等应用。
9.随机数生成:MATLAB提供了多种随机数生成函数,如均匀分布、正态分布和泊松分布等。
这些算法可以用于模拟随机现象、生成随机样本和进行蒙特卡洛分析等。
10.数值解微分方程:MATLAB提供了多种数值解微分方程的算法,如龙格-库塔法、欧拉法和变步长算法等。
这些算法可以用于求解常微分方程和偏微分方程等。
总之,MATLAB是一个功能强大的数值计算软件和编程语言,拥有丰富的算法库和函数,可以帮助科学和工程领域的研究人员解决各种数学问题。
matlab常用算法大全(数学建模)
本文总结了matlab常用的几个算法,希望对数学建模有帮助。
利用matlab编程FFD算法完成装箱问题:设有6种物品,它们的体积分别为:60、45、35、20、20和20单位体积,箱子的容积为100个单位体积。
建立box_main.mfunction[box_count,b]=box_main(v) vmax=100;sort(v,'descend');n=length(v);b=zeros(1,n);for i=1:nb(i)=vmax;endbox_count=1;for i=1:nfor j=1:box_countif v(i)<=b(j) %可以放入 b(j)=b(j)-v(i);break;else%不可放入时continue;endendif j==box_countbox_count=box_count+1;endendbox_count=box_count-1;end主程序为:v=[60 45 35 20 20 20];[box_count,b]=box_main(v)结果:box_count =3 b =5 15 80 100 100 100所以,使用的箱子数为3, 使用的箱子的剩余空间为5,15 ,80。
“超市大赢家”提供了50种商品作为奖品供中奖顾客选择,车的容量为1000dm3 , 奖品i 占用的空间为wi dm3 ,价值为vi 元, 具体的数据如下:vi = { 220, 208, 198, 192, 180, 180, 165, 162, 160, 158,155, 130, 125, 122, 120, 118, 115, 110, 105, 101, 100, 100, 98,96, 95, 90, 88, 82, 80, 77, 75, 73, 72, 70, 69, 66, 65, 63, 60, 58,56, 50, 30, 20, 15, 10, 8, 5, 3, 1}wi = {80, 82, 85, 70, 72, 70, 66, 50, 55, 25, 50, 55, 40, 48,50, 32, 22, 60, 30, 32, 40, 38, 35, 32, 25, 28, 30, 22, 50, 30, 45,30, 60, 50, 20, 65, 20, 25, 30, 10, 20, 25, 15, 10, 10, 10, 4, 4, 2,1}。
MATLAB智能算法30个案例分析
MATLAB 智能算法30个案例分析第1 章1、案例背景遗传算法(Genetic Algorithm,GA)是一种进化算法,其基本原理是仿效生物界中的“物竞天择、适者生存”的演化法则。
遗传算法的做法是把问题参数编码为染色体,再利用迭代的方式进行选择、交叉以及变异等运算来交换种群中染色体的信息,最终生成符合优化目标的染色体。
在遗传算法中,染色体对应的是数据或数组,通常是由一维的串结构数据来表示,串上各个位置对应基因的取值。
基因组成的串就是染色体,或者叫基因型个体( Individuals) 。
一定数量的个体组成了群体(Population)。
群体中个体的数目称为群体大小(Population Size),也叫群体规模。
而各个个体对环境的适应程度叫做适应度( Fitness) 。
2、案例目录:1.1 理论基础1.1.1 遗传算法概述1. 编码2. 初始群体的生成3. 适应度评估4. 选择5. 交叉6. 变异1.1.2 设菲尔德遗传算法工具箱1. 工具箱简介2. 工具箱添加1.2 案例背景1.2.1 问题描述1. 简单一元函数优化2. 多元函数优化1.2.2 解决思路及步骤1.3 MATLAB程序实现1.3.1 工具箱结构1.3.2 遗传算法中常用函数1. 创建种群函数—crtbp2. 适应度计算函数—ranking3. 选择函数—select4. 交叉算子函数—recombin5. 变异算子函数—mut6. 选择函数—reins7. 实用函数—bs2rv8. 实用函数—rep1.3.3 遗传算法工具箱应用举例1. 简单一元函数优化2. 多元函数优化1.4 延伸阅读1.5 参考文献3、主程序:1. 简单一元函数优化:clcclear allclose all%% 画出函数图figure(1);hold on;lb=1;ub=2; %函数自变量范围【1,2】ezplot('sin(10*pi*X)/X',[lb,ub]); %画出函数曲线xlabel('自变量/X')ylabel('函数值/Y')%% 定义遗传算法参数NIND=40; %个体数目MAXGEN=20; %最大遗传代数PRECI=20; %变量的二进制位数GGAP=0.95; %代沟px=0.7; %交叉概率pm=0.01; %变异概率trace=zeros(2,MAXGEN); %寻优结果的初始值FieldD=[PRECI;lb;ub;1;0;1;1]; %区域描述器Chrom=crtbp(NIND,PRECI); %初始种群%% 优化gen=0; %代计数器X=bs2rv(Chrom,FieldD); %计算初始种群的十进制转换ObjV=sin(10*pi*X)./X; %计算目标函数值while gen<MAXGENFitnV=ranking(ObjV); %分配适应度值SelCh=select('sus',Chrom,FitnV,GGAP); %选择SelCh=recombin('xovsp',SelCh,px); %重组SelCh=mut(SelCh,pm); %变异X=bs2rv(SelCh,FieldD); %子代个体的十进制转换ObjVSel=sin(10*pi*X)./X; %计算子代的目标函数值[Chrom,ObjV]=reins(Chrom,SelCh,1,1,ObjV,ObjVSel); %重插入子代到父代,得到新种群X=bs2rv(Chrom,FieldD);gen=gen+1; %代计数器增加%获取每代的最优解及其序号,Y为最优解,I为个体的序号[Y,I]=min(ObjV);trace(1,gen)=X(I); %记下每代的最优值trace(2,gen)=Y; %记下每代的最优值endplot(trace(1,:),trace(2,:),'bo'); %画出每代的最优点grid on;plot(X,ObjV,'b*'); %画出最后一代的种群hold off%% 画进化图figure(2);plot(1:MAXGEN,trace(2,:));grid onxlabel('遗传代数')ylabel('解的变化')title('进化过程')bestY=trace(2,end);bestX=trace(1,end);fprintf(['最优解:\nX=',num2str(bestX),'\nY=',num2str(bestY),'\n'])2. 多元函数优化clcclear allclose all%% 画出函数图figure(1);lbx=-2;ubx=2; %函数自变量x范围【-2,2】lby=-2;uby=2; %函数自变量y范围【-2,2】ezmesh('y*sin(2*pi*x)+x*cos(2*pi*y)',[lbx,ubx,lby,uby],50); %画出函数曲线hold on;%% 定义遗传算法参数NIND=40; %个体数目MAXGEN=50; %最大遗传代数PRECI=20; %变量的二进制位数GGAP=0.95; %代沟px=0.7; %交叉概率pm=0.01; %变异概率trace=zeros(3,MAXGEN); %寻优结果的初始值FieldD=[PRECI PRECI;lbx lby;ubx uby;1 1;0 0;1 1;1 1]; %区域描述器Chrom=crtbp(NIND,PRECI*2); %初始种群%% 优化gen=0; %代计数器XY=bs2rv(Chrom,FieldD); %计算初始种群的十进制转换X=XY(:,1);Y=XY(:,2);ObjV=Y.*sin(2*pi*X)+X.*cos(2*pi*Y); %计算目标函数值while gen<MAXGENFitnV=ranking(-ObjV); %分配适应度值SelCh=select('sus',Chrom,FitnV,GGAP); %选择SelCh=recombin('xovsp',SelCh,px); %重组SelCh=mut(SelCh,pm); %变异XY=bs2rv(SelCh,FieldD); %子代个体的十进制转换X=XY(:,1);Y=XY(:,2);ObjVSel=Y.*sin(2*pi*X)+X.*cos(2*pi*Y); %计算子代的目标函数值[Chrom,ObjV]=reins(Chrom,SelCh,1,1,ObjV,ObjVSel); %重插入子代到父代,得到新种群XY=bs2rv(Chrom,FieldD);gen=gen+1; %代计数器增加%获取每代的最优解及其序号,Y为最优解,I为个体的序号[Y,I]=max(ObjV);trace(1:2,gen)=XY(I,:); %记下每代的最优值trace(3,gen)=Y; %记下每代的最优值endplot3(trace(1,:),trace(2,:),trace(3,:),'bo'); %画出每代的最优点grid on;plot3(XY(:,1),XY(:,2),ObjV,'bo'); %画出最后一代的种群hold off%% 画进化图figure(2);plot(1:MAXGEN,trace(3,:));grid onxlabel('遗传代数')ylabel('解的变化')title('进化过程')bestZ=trace(3,end);bestX=trace(1,end);bestY=trace(2,end);fprintf(['最优解:\nX=',num2str(bestX),'\nY=',num2str(bestY),'\nZ=',num2str(bestZ), '\n']) 第2 章基于遗传算法和非线性规划的函数寻优算法1.1案例背景1.1.1 非线性规划方法非线性规划是20世纪50年代才开始形成的一门新兴学科。
matlab练习程序(BFGS)

matlab练习程序(BFGS)BFGS和DFP都是拟⽜顿法,和⾼斯⽜顿法不同的地⽅是不⽤直接求J'*J矩阵了,⽽BFGS⼜⽐DFP算法有更好的数值稳定性。
算法步骤如下:1. 给⼀个待求参数的初始值x(1)。
2. 给定H(1)矩阵为单位阵,并且计算出待优化函数在x(k)处的梯度g(k)。
3. 令d(k) = -H(k)*g(k),得到搜索⽅向。
4. 从x(k)出发,沿着d(k)⽅向搜索,给定⼀个步长,找到其搜索范围内⽐当前参数x(k)更⼩函数值对应的x值,记为x(k+1)。
5. 计算待优化函数在x(k+1)处的梯度g(k+1)。
6. 计算此时参数位移p = x(k+1) - x(k)和梯度位移q = g(k+1) - g(k)。
7. 最后根据下⾯迭代公式更新H矩阵即可,当g⼩于⼀定阈值时认为迭代结束。
下⾯两个公式是对偶的,形式上就是把p和q对换了⼀下,通常BFGS性能更优。
DFP迭代公式:BFGS迭代公式:这⾥提供⼀个作为⽰例。
matlab代码如下:clear all;close all;clc;warning off;data=[1091; %待拟合数据1492;1493;1915;2137;22410];y = data(:,1);x = data(:,2);plot(x,y,'ro');syms b1 b2;ff = sum((y - (b1*(1-exp(-b2*x)))).^2); %定义待优化函数dff1 = diff(ff,b1); %两个参数的偏导dff2 = diff(ff,b2);f=inline(char(ff),'b1','b2'); %转为函数g1=inline(char(dff1),'b1','b2');g2=inline(char(dff2),'b1','b2');b = [1;1]; %初始参数rho = 0.5;sigma = 0.5; %迭代步长H = eye(2); %⽤来替代hessian矩阵的H矩阵re=[];for i=1:200g = [g1(b(1),b(2));g2(b(1),b(2))];dk = -inv(H)*g;mk=1;for j=1:20 %局部最优搜索new=f(b(1)+rho^j*dk(1),b(2)+rho^j*dk(2));old=f(b(1),b(2));if new < old + sigma*rho^j*g'*dkmk = j;break;endendnorm(g)if norm(g)<1e-20 || isnan(new)break;endb = b + rho^mk*dk; %向局部最优⽅向移动gg=[g1(b(1),b(2));g2(b(1),b(2))];q = gg - g; %q = g(k+1)-g(k)p = rho^mk*dk; %p = x(k+1)-x(k)H = H - (H*p*p'*H)/(p'*H*p) + (q*q')/(q'*p); %矩阵更新endbx1 = min(x):0.01:max(x);y1 = (b(1)*(1-exp(-b(2)*x1)));hold on;plot(x1,y1,'b');结果如下:。
matlab中的一些经典算法
matlab中的一些经典算法在MATLAB中,有许多经典算法可以用于各种数学和工程问题。
以下是一些常见的经典算法:1. 最小二乘法(Least Squares Method),用于拟合数据和解决过定系统的线性方程组。
MATLAB中的`polyfit`和`lsqcurvefit`函数可以实现最小二乘拟合。
2. 快速傅里叶变换(Fast Fourier Transform, FFT),用于信号处理和频域分析。
MATLAB中的`fft`函数可以对信号进行快速傅里叶变换。
3. 线性规划(Linear Programming),用于优化问题的求解,例如最大化/最小化线性目标函数的线性约束问题。
MATLAB中的`linprog`函数可以用于线性规划求解。
4. 非线性最小二乘法(Nonlinear Least Squares),用于拟合非线性模型到数据。
MATLAB中的`lsqnonlin`函数可以用于非线性最小二乘拟合。
5. 最优化算法(Optimization Algorithms),MATLAB提供了许多优化算法,包括梯度下降、共轭梯度、拟牛顿等算法,用于解决无约束和约束优化问题。
6. 插值算法(Interpolation),MATLAB中的`interp1`和`interp2`函数可以用于一维和二维数据的插值。
7. 微分方程求解(Differential Equation Solving),MATLAB中的`ode45`和`ode15s`等函数可以用于求解常微分方程和偏微分方程。
8. 图像处理算法(Image Processing Algorithms),MATLAB提供了丰富的图像处理工具箱,包括滤波、边缘检测、图像分割等经典算法。
以上列举的算法只是 MATLAB 中众多经典算法的一小部分,它们在数学建模、信号处理、优化、图像处理等领域有着广泛的应用。
希望这些信息能够帮助到你。
第五讲 规划问题的matlab计算
但是,输入matlab计算时,应该输入成x1,x2,…,x25的 格式。本题有25个0-1变量且需要约束全部化为小于等 于形式。约束矩阵是20x25的矩阵(为什么?),应 该采用稀疏矩阵的输入方式。
>> clear >> c=[32 17 34 36 25 21 31 21 22 19 24 29 40 28 39 26 35 41 33 29 33 27 31 42 22]; >> A=zeor(20,25);
后者略优于前者bfgs是至今最好的拟牛顿法下面对两种算法作一个计算对比functionfgzuisu2xdfp拟牛顿法计算initialhesstypeidentity初始hesse矩阵用单位阵optionsoptimset?largescale??off??hessupdate??dfp??gradobj??on??maxfunevals?250?initialhesstype??identity??display??iter?
参数输入: Fun: x0: 目标函数,一般用M文件给出 优化的初始点
Options: 参数设置(后面说明)
函数输出:
X:最优点(或最后迭代值) Fval:最后迭代值的目标函数值 Exitflag:函数结束的信息 Oupput:函数基本信息,包括迭代次数,目标函数最 大计算次数,使用的算法名称,计算规模
x =
Ax b, s.t .Qx p , x 0
求解命令: x=linprog(c,A,b,Q,p)
若没有不等式,则令A=[ ],b=[ ]。
例2
例2 求解线性规划
min z 13 x1 9 x2 10 x3 11x4 12 x5 8 x6 ; x1 x4 400, x x 600, 5 2 x3 x6 500, s.t. 0.4 x1 1.1x2 x3 800, 0.5 x4 1.2 x5 1.3 x6 900, x16 0
DFP法、BFGS.、共轭梯度法
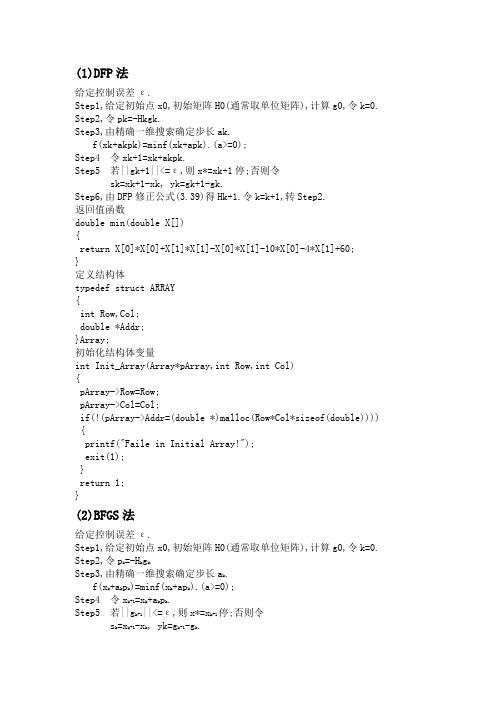
(1)DFP法给定控制误差ε.Step1,给定初始点x0,初始矩阵H0(通常取单位矩阵),计算g0,令k=0. Step2,令pk=-Hkgk.Step3,由精确一维搜索确定步长ak.f(xk+akpk)=minf(xk+apk).(a>=0);Step4 令xk+1=xk+akpk.Step5 若||gk+1||<=ε,则x*=xk+1停;否则令sk=xk+1-xk, yk=gk+1-gk.Step6,由DFP修正公式(3.39)得Hk+1.令k=k+1,转Step2.返回值函数double min(double X[]){return X[0]*X[0]+X[1]*X[1]-X[0]*X[1]-10*X[0]-4*X[1]+60;}定义结构体typedef struct ARRAY{int Row,Col;double *Addr;}Array;初始化结构体变量int Init_Array(Array*pArray,int Row,int Col){pArray->Row=Row;pArray->Col=Col;if(!(pArray->Addr=(double *)malloc(Row*Col*sizeof(double)))) {printf("Faile in Initial Array!");exit(1);}return 1;}(2)BFGS法给定控制误差ε.Step1,给定初始点x0,初始矩阵H0(通常取单位矩阵),计算g0,令k=0.Step2,令pk =-Hkgk.Step3,由精确一维搜索确定步长ak.f(xk +akpk)=minf(xk+apk).(a>=0);Step4 令xk+1=xk+akpk.Step5 若||gk+1||<=ε,则x*=xk+1停;否则令s k =xk+1-xk, yk=gk+1-gk.Step6,修正公式H k+1=Hk-HkykykT Hk/(ykT Hkyk)+skskT/(ykT sk)+wkwkT .其中wk由一下公式给出.W k =(ykT Hkyk)1/2(sk/(ykT sk)-Hkyk/(ykT Hkyk))得Hk+1.令k=k+1,转Step2.修正公式与DFP法不一样,其他部份都一样.(1)共轭梯度法给定控制误差ε。
dfp法初始矩阵h的值
dfp法初始矩阵h的值
在使用DFP法进行优化计算时,初始矩阵$H$的值通常取单位矩阵$\ tomatlab$中,即$H_0=I$。
DFP算法的基本思路是通过构造一个近似的海森矩阵来模拟目标函数的局部二次特性,并使用这个矩阵来计算每个迭代步的搜索方向和步长。
其核心思想是在每一次迭代中,利用之前的迭代信息来更新海森矩阵,以得到更好的搜索方向和步长。
在实际应用中,你可以根据具体问题的需求和约束来选择合适的初始矩阵$H$。
如需了解更多DFP法的相关信息,可以继续向我提问。
最优化DFP算法报告
最优化DFP算法姓名:施政学号:1010010125 班级:1 班专业:通信与信息系统目录1 算法流程图 (1)1.1DFP算法的流程图 (1)1.2 黄金分割法流程图 (1)1.3 回退法计算初始区间的算法 (2)2 测试函数 (3)2.1 二维、二次函数 (3)2.2 二维、高次函数 (3)2.3 高维、二次函数 (4)2.4 高维、高次函数 (4)3 运行结果及分析 (5)4 Matlab源程序 (6)4.1 主函数 (6)4.2 DFP算法函数 (8)4.3 黄金分割法函数 (9)4.4 回退法求解初始区间 (10)4.5 计算测试函数的值 (11)4.6 计算测试函数的梯度 (12)5 参考文献 (12)1 算法流程图对于DFP算法主要涉及到3个主要的算法,分别是:利用回退法计算初始区间、利用黄金分割法进行一维搜索、然后利用DFP算法计算最小点对应的自变量的值。
下面分别画出了这三个算法流程图。
1.1DFP算法的流程图设定控制误差为ε;输入的初始点坐标是0x;0E是与0x同维的单位阵。
图 11.2 黄金分割法流程图给定精确度ε>0;当区间长度小于等于ε时,即停止运行,同时取x=(a+b)/2作为最小点坐标。
在给定初始区间[a,b]内,求最小点时对应的α值,要保证α是大于等于零的,否则函数值就不是朝下降方向递降的了。
在本算法中保证初始区间的端点是大于等于零的,就可以满足这一条件了。
算法如下图所示:图 21.3 回退法计算初始区间的算法针对这个算法,参考文献[1]上面利用的回退法不能保证a ,b 两个端点的值大于零,因为利用黄金分割法求α时,α肯定是大于等于零的,所以可以对书上的算法适当的改进。
初始的点是0x ;步长是x Δ;算法如下:图 3注意:上面的算法是针对一维的情况,所以在计算0x ;1x ;2x 时,应该注意使用0000*x a t p =+;0a 代表的是对应DFP 算法上次迭代的自变量的坐标值,0p 代表的是0a 点的梯度,0t 开始的值是0;同样有1010*x a t p =+;2020*x a t p =+;10t t t =+Δ;21t t t =+Δ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
否则令 sk xk1 xk , yk g k1 g k 。
(6)由 DFP 修正公式得 H k1 。令 k=k+1,转步骤(2)
三、DFP 算法 matlab 程序实现 function [best_x,best_fx,count]=DFP(x0,ess) syms x1 x2 t; f=x1*x1+2*x2*x2-2*x1*x2-4*x1; fx=diff(f,x1);%求表达式 f 对 x1 的一阶求导 fy=diff(f,x2);%求表达式 f 对 x2 的一阶求导 fi=[fx fy];%构造函数 f 的梯度函数 %初始点的梯度和函数值 g0=subs(fi,[x1 x2],x0); f0=subs(f,[x1 x2],x0); H0=eye(2); %输出 x0,f0,g0 x0 f0 g0 xk=x0; fk=f0; gk=g0; Hk=H0; k=1; while(norm(gk)>ess)%迭代终止条件||gk||<=ess disp('************************************************************')
tk=double(tk); else
break; end %计算下一点的函数值和梯度 xk=subs(xk,t,tk) fk=subs(f,[x1 x2],xk) gk0=gk; gk=subs(fi,[x1 x2],xk) %DPF 校正公式,找到修正矩阵 yk=gk-gk0; sk=tk*pk';
-5.5000 gk =
-1 -2 Hk =
0.8400 0.3800 0.3800 0.4100
************************************************************ 第 2 次寻优 xk =
42 fk =
-8 gk =
00 Hk =
1.0000 0.5000 0.5000 0.5000
Hk=Hk-(Hk*yk'*yk*Hk)/(yk*Hk*yk')+sk'*sk/(yk*sk')%修正公式 k=k+1; end disp('结果如下:') best_x=xk;%最优点 best_fx=fk;%最优值 count=k-1;
四、程序执行结果 在命令窗口输入以下命令: >> x0=[1 1];
于是,由 DFP 修正公式有 H1
H0
H
0
y
0
y
T 0
H
0
y0T H 0 y0
s
0
s
T 0
y
T 0
s0
1 100
8348
3481
下一个搜索方向为
p1
H1g1
1 5
8,6T
(2)求迭代点 x2
令1 ( )
f (x1
p1 )
8 2 5
4
5.5 令0 ( )
f (x0
p0 )
40 2
20
3 ,得0 ( ) 的极小值点 0
1 4
,
所以得: x1 x0 0 p0 2,0.5T , g1 1,2T ,
s0 x1 x0 (1,0.5)T , y0 g1 g0 (3,4)T .
作业二
用 DFP 算 法 求 解 min f (x) x12 2x22 2x1x2 4x1 , 取 x0 1 1T ,
H0
1 0
0 1
。
一、求解:
g(x) (2x1 2x2 4,2x1 4x2 )T , g0 (4,2)T , p0 H 0 g0 (4,2)T
结果如下:
best_x = 42
best_fx = -8
count = 2
可以看到,最优点 x (4,2)T , f 8 ,迭代次数 2 次,与前面结果一致。
4 5
于是得: x2 x1 1 p1 4,2T , g 2 (0,0)T ,所以: x x2 (4,2)T , f 8 ,
因
Hesse
阵
G(x)
G
2 2
2 4
T
为正定阵,
f
(x)
为严格凸函数,所以
x
为整体
极小点。
二、DFP 算法迭代步骤如下:
(1)给定初始点 x0 ,初始矩阵 H 0 (通常取单位阵),计算 g0 ,令 k=0,给定控制误 差 。
(2)令 pk H k g k 。
(3)由精确一维搜索确定步长 k
,
f
(xk
k
pk )
min
0
f
(xk
pk )
(4)令 xk1 xk k pk 。
(5)若 g k ,则 x xk1 停;
disp(['第' num2str(k) '次寻优']) %确定搜索方向
pk=-Hk*gk'; %由步长找到下一点 x(k+1) xk=xk+t*pk'; f_t=subs(f,[x1 x2],xk); %构造一元搜索的一元函数φ(t) %由一维搜索找到最优步长 df_t=diff(f_t,t); tk=solve(df_t); if tk~=0
ess=1e-6; [best_x,best_fx,count]=DFP(x0,ess) 程序运行结果: x0 =
11 f0 =
-3 g0 =
-4 2
************************************************************ 第 1 次寻优 xk =
2.0000 0.5000 fk =