第6章 梯形图程序的设计方法PPT课件
第六章 PLC控制程序的设计
3.设计顺序功能图时应该注意的问题 (1)两个步之间必须有转换条件。如果没有, 则应该将这两步合为一步处理。
(2)两个转换不能直接相连,必须用一个步将 它们分隔开。
(3)从生产实际考虑,顺序功能图必须设置初 始步。
(4)顺序功能图应该是一个或两个由方框和有 向线段组成的闭环,也就是说在顺序功能图中不能
4.动作(或命令) 可以将一个控制系统划分为被控系统和施控系 统。对于被控系统,在某一步中要完成某些“动作” (action)。对于施控系统,在某一步则要向被控系 统发出某些“命令”(command)。
为了叙述方便,将命令或动作统称为动作,它 实质是指步对应的工作内容。动作用矩形框或中括 号上方的文字或符号表示,该中括号与相应的步的 矩形框通过短线相连。
有“到此为止”的死胡同。
(5)要想能够正确地按顺序运行顺序功能图程 序,必须用适当的方式将初始步置为活动步。一般
用特殊存储器SM0.1的动合触点作为转换条件,将初 始步置为活动步。
(6)在个人计算机上使用支持SFC的编程软件 进行编程时,顺序功能图可以自动生成梯形图或指
令表。
三、顺序功能图设计法与经验设计法的比较
10.电动机“顺序启动,逆序停车”控制系统设计
(1)控制要求 现有三台电动机M1、M2、M3,要求启动顺序 为:先启动M1,经过8s后启动M2,再经过9s后启动 M3;停车时要求:先停M3,经过9s后再停M2,再 经8s后停M1。
(2)分析控制过程 根据上述控制要求的描述,本程序需要设置四 个定时器,此处选用T50~T53。 T50计时起点为启动信ห้องสมุดไป่ตู้I0.0 T52计时起点为停止信号I0.1。 T53计时时间到后,复位两个辅助继电器,辅助 继电器的OFF会使T50~T53的位为OFF,致使 Q0.0~Q0.2全部OFF。
电气控制与PLC控制基础理论-第六章

输入
输出
SB1 X1 SB2 X2
红灯L1
Y0
绿灯L2,L3,L4,L5 Y1
黄灯L6,L7,L8,L9 Y2
表6-2 天塔之光控制系统输入/输出端口分配表
天塔之光控制系统设计
2、基于三菱FX2N系列PLC天塔之光控制系统设计 (2)PLC外部接线图设计 PLC外部接线图设计如图6-10所示。
➢ 要考虑电源的输出功率和极性问题。
编制PLC程序并进行模拟调试
编制PLC程序时要注意以下问题: (1)以输出线圈为核心设计梯形图,并画出该线圈的得电条件、失电条件和自锁条件。 (2)如果不能直接使用输入条件逻辑组合成输出线圈的得电和失电条件,则需要使用辅助继电器 建立输出线圈的得电和失电条件。 (3)如果输出线圈的得电和失电条件中需要定时或计数条件时,要注意定时器或计数器得电和失 电条件。 (4)如果输出线圈的得电和失电条件中需要功能指令的执行结果作为条件时,使用功能指令梯级 建立输出线圈的得电和失电条件。 (5)画出各个输出线圈之间的互锁条件。 (6)画保护条件。 根据以上要求绘制好梯形图后,将程序下载到PLC中,通过观察其输出端发光二极管的变化进行模 拟调试,并根据要求进行修改,直到满足系统要求。
图6-16 PLC外部接线图 图6-17 DC24V直流电源接线图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (4)PLC强电电路图 PLC强电电路图如图6-18所示。
图6-18 PLC强电电路图
十字交通灯控制系统设计
2、基于三菱FX2N系列PLC十字交通灯控制系统设计 (5)PLC梯形图设计 PLC梯形图设计如图6-19所示。 (6)指令程序的传输 使用GX Developer(或FXGP/WIN-C)编程软件绘 制图6-19所示的PLC梯形图,并进行转换和PLC程序传 输。也可使用FX-20P型手持式编程器进行程序传输, 方法不再赘述。
梯形图的设计方法

例1:送料小车自动控制系统的梯形图设计 控制要求:小车在ST1处装料,15s后装料结束,开始右行,碰 到行程开关ST2后停下来卸料,10s后左行,碰到行程开关ST1 又停下来装料,这样不停的循环工作。 装料15s 左
ST1 ST2
卸料10s
右
装料处
卸料处
在左行和右行过程中,按下停止按钮SB3小车停止运行。
00000 01000 TIM001 00001
00002
00001 01001
00003
01000
右行
00002
00000 01000
00004
01001
左行
01001
TIM000 00003 TIM 000 #0100 00004 01003 TIM 001
卸料
#0150
01002
装料
例2:两处送料小车的自动控制系统梯形图设计 小车在ST1处装料,在ST3、ST2处轮流卸料。小车右行第 一次碰到ST3时停下卸料,第二次碰到ST3时不停,到ST2时停 下卸料。 装料15s 左
右行
01001
左行
(B).考虑行程开关的作用。小车没有到位行程开关不动作,小车到位行 程开关动作,则相应的小车运行应停止。
00000 00002 00001 01001
01000
00003
01000
右行
00001 00002 00000 01000 01001
00004
01001
左行
(C).考虑装料、卸料
(1). 控制按钮设置
一个右行启动按钮SB1;一个左行启动按钮SB2;一个停止按钮SB3 。
(2). I/O分配
输 按钮及行程开关 入 PC输入端子号 输 输出设备名称 出 PC输出端子号
第六章顺序控制法及顺序功能图
第六章 顺序控制法及顺序功能图
第一节 顺序控制编程的初步认识 起保停电路的设计方法 以转换为中心的设计方法
四、 顺序功能图的基本结构 1.单序列 由一系列的相继激活的步组 成,每一步的后面仅有一个转换, 每一个转换的后面只有一个步。
图6-6 a)单序列
分支
转换条件, 在水平线 内侧
2. 选择序列 选择序列的开始称为分支,转换符号 只能标在水平连线之下。 选择序列的结束称为合并,转换符号 只能标在水平连线之上。 一般只允许同时选择一个序列。 分支
1、单序列编程 某工作台旋转运动的示意图6-8所示。工作台在初始状态时停在 限位开关I0.1处,I0.1为1状态。按下起动按钮I0.0,工作台正转, 旋转到限位开关I0.2处改为反转,返回到限位开关I0.1处又改为正 转,旋转到限位开关I0.3处又改为反转,回到初始点时停止工作。
2、 选择序列与并行序列的编程方法 、 2-17
合并
3.并行序列 转换条件,在 并行序列的开始称为分支,转换 水平线外侧 符号只能标在水平连线之上。 并行序列的结束称为合并,转换 符号只能标在水平连线之下。 当转换条件实现,几个序列同时 合并 激活,当几个序列最后步都处于 激活状态,且转移条件实现,转 入合并。 图6-6c)并行序列
循环结构用于一个顺序过程的多次 或往复执行。功能图画法如图补 所 或往复执行。功能图画法如图补8-6所 示,这种结构可看作是选择性分支 结构的一种特殊情况。 结构的一种特殊情况。
数字量控制系统梯形图程序设计方法

顺序控制设计法则是用输入量 I 控制代表各步的编程元件(例如M),再 用它们控制输出量Q。步是根据输出量Q的状态划分的,输出电路的设计极 为简单。任何复杂系统的代表步的存储器位M的控制电路的设计方法都是 通用的,并且很容易掌握。
5.3 使用置位复位指令的顺序控制梯形图设计方法
一般采用图5-12所示的典型结构,自动方式和手动方式都需要执行的操作 放在公用程序中,公用程序还用于自动程序和手动程序相互切换的处理。I2.0 是自动/手动切换开关,当它为ON时调用手动程序,为OFF时调用自动程序。
5
图5-5中的动作Q0.0在连续的3步都应为ON,图5-7 用动作的修饰词“S”在它应为ON的第一步M0.1将 它置位,用动作的修饰词“R”在它应为ON的最后 一步的下一步M0.0,将它复位。Q0.0这种动作是存 储性动作。
5.2.2 有向连线与转换条件
1.有向连线 在画顺序功能图时,将代表各步的方框按它们成为 活动步的先后次序顺序排列,并用有向连线将它们连 接起来。步的活动状态习惯的进展方向是从上到下或 从左至右,在这两个方向有向连线上的箭头可以省略。 如果不是上述的方向,则应在有向连线上用箭头注明 进展方向。
9
图5-10 专用钻床控制系统的示意图与顺序功能图
10
用并行序列来描述两个钻头同时工作的过程。在步M0.1之后,有一个并行 序列的分支。当M0.1为活动步,且转换条件I0.1得到满足,并行序列的两个单 序列中的第1步(步M0.2和M0.5)同时变为活动步。此后两个单序列内部各步 的活动状态的转换是相互独立的。
5.3.1 单序列的编程方法
1.步的控制电路的设计
在梯形图中,用编程元件(例如M)代表步,当某步为活动步时,该步对
应的编程元件为ON。当该步之后的转换条件满足时,转换条件对应的触点或
第6章 顺序控制梯形图的编程方式
1-6
PLC原理及应用 原理及应用
3、转换条件: 进入初始步的条件:M8002=1;T2=1。 进入初始步的条件:M8002=1;T2=1。 进入4秒步的条件:X0=1。 进入4秒步的条件:X0=1。 进入6秒步的条件:T0=1。 进入6秒步的条件:T0=1。 进入5秒步的条件:T1=1。 进入5秒步的条件:T1=1。 特别注意初始步的激活问题:用M8002的常开触点 特别注意初始步的激活问题:用M8002的常开触点 将初始步的编程元件置位。 4、各步的动作: 初始步的动作:Y0。 初始步的动作:Y0。 4秒步的动作:Y0、T0。 秒步的动作:Y0、T0。 6秒步的动作:Y1、T1。 秒步的动作:Y1、T1。 5秒步的动作:Y1、Y2、T2。 秒步的动作:Y1、Y2、T2。 二、根据分析画出时序图(见图6 所示) 二、根据分析画出时序图(见图6-2所示) 根据分析画出时序图
■
1-17
PLC原理及应用 原理及应用
三、跳步与循环次数的控制
S0
X04
相当 选择 分支
1、跳步(如图6-7所示) 、跳步(如图6 所示) 1)当S0处于活动状态,且X04=1时,将跳 处于活动状态, 04= 过S1步,由步S0进展到S2。称为正向跳步。 由步S 进展到S 称为正向跳步 正向跳步。 2)当S4处于活动状态,且X05=1时,将从 S4处于活动状态 处于活动状态, X05=1时 步S4返回到步S3。称为逆向跳步。 S4返回到步 。称为逆向跳步 返回到步S3 逆向跳步。 显然,跳步属于选择序列的一种特殊情况。 显然,跳步属于选择序列的一种特殊情况。 2、循环次数的控制 在设计梯形图时,经常遇到一些需要多次 重复的操作,此时可借助高级语言循环语句的 思想来设计顺序功能图和梯形图。逆向跳步
《梯形图设计方法》PPT课件

第4章 梯形图程序 设计方法
精选ppt
1
主要内容
4.1 梯形图的常用电路 4.2 梯形图的设计方法 4.3 根据继电器电路图设计
梯形图的方法 4.4 梯形图的经验设计法
精选ppt
2
4.1 梯形图的常用电路
(1) 起动、保持和停止电路
X1为起动信号,X2为停 止信号,当X1接通时, Y1得电并自锁,即使X1 断开,Y1线圈可持续 “通电”。只有X2常闭 触点断开才能使Y1线圈 “断电”。
4.4 梯形图的经验设计法
❖ 基本思路:在已有的些典型梯形图的基础上,根据被控对 象对控制的要求,通过多次反复地调试和修改梯形图,增 加中间编程元件和触点,以得到一个较为满意的程序。
❖ 基本特点:没有普遍的规律可以遵循,设计所用的时间、 设计的质量与编程者的经验有很大的关系。
❖ 适用场合:可用于逻辑关系较简单的梯形图程序设计。 ❖ 基本步骤:分析控制要求、选择控制原则;
精选ppt
20
4.3 根据继电器电路图 设计梯形图的方法
注意事项: ➢ 应遵守梯形图语言中语法规定 ➢ 设置中间单元 ➢ 尽量减少PLC的输入信号和输出信号 ➢ 外部联锁电路的设立 ➢ 为减少指令数,串联电路中的单个触点放在右边,
并联电路中的单个触点放在下面 ➢ 注意外部负载的额定电压
精选ppt
21
特点:考虑不周、设计麻烦、设计周期长;梯形 图的可读性差、系统维护困难。
精选ppt
27
思考题
1 根据下面波形图画梯形图。
(a)
(b)
精选ppt
28
思考题
2 用一个定时器和一个计数器设计一个长延时电路, 在X0的常开触点接通24h后将Y12的线圈接通。
PLC编程及应用全套课程课件

类型 (1)随机存取存储器(RAM) 用户可以用编程装置读出RAM中的内容,也可以将用户程序写入RAM,它是易失性的存储器,它的电源中断后,储存的信息将会丢失。 (2)只读存储器(ROM) ROM的内容只能读出,不能写入。它是非易失的,它的电源消失后,仍能保存储存的内容。ROM一般用来存放可编程序控制器的系统程序。
定义强调了PLC是: 1 数字运算操作的电子系统——也是一种计算机 2 专为在工业环境下应用而设计 3 面向用户指令——编程方便 4 逻辑运算、顺序控制、定时计算和算术操作 5 数字量或模拟量输入输出控制 6 易与控制系统联成一体 7 易于扩充
第二章PLC基本组成和工作原理
● PLC的基本组成 ● PLC的工作原理
2.1 PLC的基本组成
1.中央处理单元(CPU): (1)从程序存储器读取程序指令,编译、执行指令 (2)将各种输入信号取入 (3) 把运算结果送到输出端 (4) 响应各种外部设备的请求 (1)通用处理器:8086、80286、80386 (2)单片机芯片:8031、8096 (3)位片式微处理器:AMD-2900 小型PLC多采用8位微处理器或单片机作为CPU 中型PLC多采用16位微处理器或单片机作为CPU 大型PLC多采用高速位片式微处理器
1968年.美国最大的汽车制造厂家——通用汽车公司(GM)为了适应汽车型号不断更新的需要,提出了十条技术指标在社会上公开招标,制造一种新型的工业控制装置,提出了研制可编程序控制器的基本设想,即 (1)能用于工业现场。 (2)能改变其控制“逻辑”,而不需要变动组成它的元件和修改内部接线。 (3)出现故障时易于诊断和维修。 1969年,美国数字设备公司(DEC)研制出了世界上第一台PLC。并在GM公司汽车生产线上首次应用成功。 (逻辑、计时、计数) 1980年美国电气制造商协会(NEMA)正式将其命名为可编程序控制器(Programmable Controller),简称 PC
-梯形图程序的设计方法PPT课件

为使小车自动起动,将控制装、卸料延时 的定时器T0和T1的常开触点,分别与手动起动 右行和左行的X0、X1的常开触点并联,并用两 个限位开关对应的X4和X3的常开触点分别接通 装料、卸料电磁阀和相应的定时器。
例2 两处卸料小车自动控制的梯形图程序设计
控制要求 说明:小车仍然在限位开关X4处装料,但在X5和X3两处轮
流卸料。
两处卸料小车自动控制 程序设计
5.3 顺序控制设计法
1、经验设计法的问题
1)设计方法很难掌握,设计周期长 2)维修困难
逻辑关系复杂,可读性差,分析困难,维修和改进困难
2、顺序控制设计法
如果一个控制系统可以分解成几个独立的控制动作,且这些动作必须 严格按照一定的先后次序执行,叫顺序控制系统,也称为步进控制系统。
5)T2只通一个扫描周期
例1 送料小车自动控制的梯形图程序设计
控制要求:
说明:X4处装料,20s后装料结束,开始右行,碰到X3后停下卸 料,25s后左行,碰到X4后又停下装料,这样不停地循环工作。
按钮X0和X1分别用来起动小车右行和左行。
设计思路
以众所周知的电动机正反转控制的梯形图 为基础,设计出的小车控制梯形图。
● 输出 右行接触器线圈KM1,左行接触器线圈KM2,触点互锁
小车自动控制
● 右行 按下SB1,Y0为ON ● 延时 到右限位X4,延时10S ● 左行 定时10S到,Y1=ON ● 互锁 加上软硬件互锁
可以以电机正反转控制电路为基础设计,两个起保停电 路,一个定时器驱动电路,加上各种互锁实现。
● 按钮互锁 ● 限位开关互锁 ● 触点互锁 ● 硬件互锁
T0定时2s,2s到Y0=ON; T1定时3s,3s到T0断电,Y0=OFF
第6章顺控梯形图的编程方式
(a) 状态转移图
(b)梯形图 图6.4 单一顺序的编程方式
(c)指令表
第6章 顺控梯形图编程方式
在状态转移图的起始位置的状态为初始状态,状态 元件中的S0~S9可用作初始状态。 开始运行时初始状态必须用其它方法预先驱动,使 之处于工作状态。当PLC由STOP向RUN切换的瞬 间,使M8002输出一个脉冲,可以激活初始状态; 初始状态也可以由其他元件来驱动。 初始状态之外的其他状态元件必须用STL指令驱动。 程序在一系列STL指令的最后必须要有RET指令; 当返回S0时,必须用OUT指令。 在顺序控制编程方法中,所有的跳转都必须用 OUT指令驱动,不能用SET指令。
第6章 顺控梯形图编程方式
⒈ 单一顺序的编程方式
步序 指 令 0 LD M8002 1 SET S0 3 STL S0 4 OUT Y0 5 LD X0 6 SET S20 8 STL S20 9 OUT Y1 10 LD X1 11 SET S21 13 STL S21 14 OUT Y2 步序 指 15 LD 16 SET 18 STL 19 OUT 20 LD 21 OUT 23 RET 令 X2 S22 S22 Y3 X3 S0
第6章 顺控梯形图编程方式
⒉ 选择序列和并行序列的编程方式
选择序列
(a) 状态转移图
并行序列
(b)梯形图
第6章 顺控梯形图编程方式
⒉ 选择顺序和并行顺序的编程方式
步序 0 LD 1 SET 3 STL 4 LD 5 SET 7 LD 8 SET 10 STL 11 OUT 12 STL 13 OUT 14 STL 指令 M8002 S0 S0 X0 S20 X2 S21 S20 Y1 S21 Y2 S20 步序 指令 15 LD X1 16 SET S22 18 STL S21 19 LD X3 20 SET S22 22 STL S22 23 OUT Y3 24 LD X4 25 SET S23 27 SET S25 29 STL S23 30 OUT Y4 步序 指令 31 LD X5 32 SET S24 34 STL S24 35 OUT Y5 36 STL S25 37 OUT Y6 38 LD X6 39 SET S26 41 STL S26 42 OUT Y7 43 STL S24 44 STL S26 步序 指令 45 LD X7 46 SET S27 48 STL S27 49 OUT Y10 50 LD X10 51 OUT S0 53 RET
S7-200 PLC原理及应用 第3版课件第6章
6.1.1顺序控制设计法
根据功能流程图,以步为核心,从起始步开始一步一步地设计下去,直 至完成。此法的关键是画出功能流程图。 首先将被控制对象的工作过程按输出状态的变化分为若干步,并指出步 之间的转换条件和每个步的控制对象。 这种工艺流程图集中了工作的全部信息。 在进行程序设计时,可以用中间继电器M来记忆步,一步一步地顺序进 行,也可以用顺序控制指令来实现。
2)使用置位、复位指令的编程方法。
3)使用移位寄存器指令编程的方法。
4)使用顺序控制指令的编程方法。
(2)选择分支及编程方法。
选择分支开始指:一个前级步后面紧接着若干个后续步可供选择,各分支都有各自的转 换条件,在图中则表示为代表转换条件的短划线在各自分支中。 选择分支结束,又称选择分支合并,是指:几个选择分支在各自的转换条件成立时转换 到一个公共步上。
油雾器:气压系统中一种特殊的注油装置,其作用是把润滑油雾化后, 经压缩空气携带进入系统各润滑油部位,满足润滑的需要。
气源处理组件是气动控制系统中的基本组成器件,它的作用是除去压缩 空气中所含的杂质及凝结水,调节并保持恒定的工作压力。YL335B生产 线的气源处理组件如图所示。
a)气源处理组件实物图 b)气动原理图
跳转流程:当步2为活动步时,若条件f=1, 则跳过步3和步4,直接激活步5。 循环流 程:当步5为活动步时,若条件e=1,则 激活步2,循环执行。
需要注意的是:
1)转换是有方向的,若转换的顺序是从上到下,即为正常顺序,可以省略箭头。若转换的顺序从下到上, 箭头不能省略。
2)只有两步的闭环的处理。在顺序功能图中只有两步组成的小闭环如图a所示,因为M0.3既是M0.4的前级 步,又是它的后续步,所以对应的用起保停电路模式设计的梯形图程序如图b所示。从梯形图中可以看出, M0.4线圈根本无法通电。解决的办法是:在小闭环中增设一步,这一步只起短延时(≤0.1s)作用 ,由于 延时取得很短,对系统的运行不会有什么影响,如图c所示。
PLC编程:梯形图程序设计基础
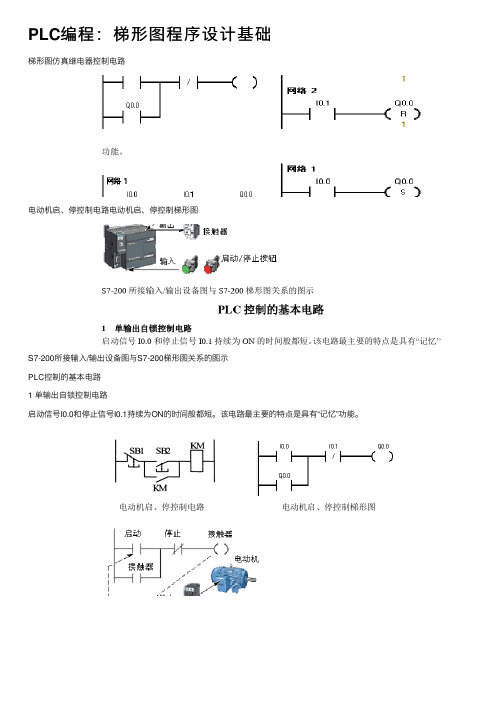
PLC编程:梯形图程序设计基础梯形图仿真继电器控制电路电动机启、停控制电路电动机启、停控制梯形图S7-200所接输⼊/输出设备图与S7-200梯形图关系的图⽰PLC控制的基本电路1 单输出⾃锁控制电路启动信号I0.0和停⽌信号I0.1持续为ON的时间般都短。
该电路最主要的特点是具有“记忆”功能。
多地控制2 多输出⾃锁控制电路(置位、复位)多输出⾃锁控制即多个负载⾃锁输出,有多种编程⽅法,可⽤置位、复位指令3 单向顺序启\停控制电路1. 单向顺序启动控制电路是按照⽣产⼯艺预先规定的顺序,在各个输⼊信号的作⽤下,⽣产过程中的各个执⾏机构⾃动有序动作。
只有Q0.0启动后,Q0.1⽅可启动,Q0.2必须在Q0.1启动完成后才可以启动。
2. 单向顺序停⽌控制电路就是要求按⼀定顺序停⽌已经执⾏的各机构。
只有Q0.2被停⽌后才可以停⽌Q0.1,若想停⽌Q0.0,则必须先停⽌Q0.1。
I0.4为急停按钮。
4 延时启\停控制电路1.延时启动控制设计延时启动程序,要利⽤中间继电器(内部存储器M)的⾃锁状态使定时器能连续计时。
定时时间到,其常开触点动作,使Q0.0动作。
2.延时停⽌控制定时时间到,延时停⽌。
I0.0为启动按钮、I0.1为停⽌按钮。
3.延时启\停控制电路该电路要求有输⼊信号后,停⼀段时间输出信号才为ON;⽽输⼊信号0FF后,输出信号延时⼀段时间才OFF。
T37延时3 s作为Q0.0的启动条件,T38延时5 s作为Q0.0的关断条件。
5 超长定时控制电路S7-200 PLC中的定时器最长定时时间不到1 h,但在⼀些实际应⽤中,往往需要⼏⼩时甚⾄⼏天或更长时间的定时控制,这样仅⽤⼀个定时器就不能完成该任务。
下例表⽰在输⼊信号I0.0有效后,经过10 h 30 min 后将输出Q0.0置位。
T37每分钟产⽣⼀个脉冲,所以是分钟计时器。
C21每⼩时产⽣⼀个脉冲,故C21为⼩时计时器。
当10 h计时到时,C22为ON,这时C23再计时30 min,则总的定时时间为10 h 30 min,Q0.0置位成ON。
lc第六章程序设计PPT参考课件
Date: 2024/8/5
Page: 21
电气控制与PLC应用21
CH6 FX系列PLC的程序设计
顺序功能图的绘制
➢ 根据以上分析和被控对象工作内容、步骤、顺序和控制要 求画出顺序功能图。绘制顺序功能图是顺序控制设计法中 最为关键的一步。
➢ 顺序功能图又称做状态转移图,它是描述控制系统的控制 过程、功能和特性的一种图形。
➢ 顺序功能图不涉及所描述控制功能的具体技术,是一种通 用的技术语言,可用于进一步设计和不同专业的人员之间 进行技术交流。
➢ 国际电工委员会1994年5月公布的可编程控制器标准 IEC1131—3中,将SFC (Sequential Function Chart) 确定为可编程控制器位居首位的编程语言。各个PLC厂家 都开发了相应的顺序功能图。
CH6 FX系列PLC的程序设计
教学目标
掌握经验设计法和顺序功能图设计法。 能用PLC设计自动控制系统。
Date: 2024/8/5
Page: 1
电气控制与PLC应用1
CH6 FX系列PLC的程序设计
第一节 PLC程序的经验设计法
• 基本思路:根据控制要求选择相关联的基本控制环节或经验证的成
熟程序,对其进行补充和修改,最终综合成满足控制要求的完整程序。 若找不到现成的相关联程序,需根据控制要求一边分析一边设计,随 时增加或减少元件以及改变触点的组合方式,经过反复修改最终得到 理想的程序。
常闭触点断开,打开自保,Y0为OFF。
➢ 图(c)中为利用功能指令中的交替输出指令ALT来实现单按钮控制启停控
制的电路。
Date: 2024/8/5
Page: 7
电气控制与PLC应用7
CH6 FX系列PLC的程序设计
(完整版)PLC顺序控制梯形图的编程方式汇总

X2 起动
M201
Y0
X0
M202
Y0
Y1 X0
M203
Y1
X1
M8002 M200 X2
M201 X0
M202 X0 X1
M203 T2
SET M200 SET M201 RST M200
SET M202 RST M201
SET M203 RST M202 PLS M100 SET M200 RST M203
补充:状态转移图
一个控制过程可以分为若干个阶段,这些阶 段称为状态。状态与状态之间由转换条件分 隔,相邻的状态具有不同的动作,当相邻两 状态之间的转换条件得到满足时,相邻状态 就实现转换,即上面的动作结束下面的动作 开始,描述这一状态转换过程的图就称为状 态转移图
状态器软器件S是构成状态转移图的基本元素, 共有1000点
用传送带传送长物体的控制 图如图所示。为了减少传送 带的运行时间,采用分段传 送方式。A、B为两条传送带, GK1、GK2为两个光电开关, 工作过程如下:按一下起动 按钮,A开始运行,B不运行; 当长物体前端靠近GK1时, A、B都运行;当长物体后端 离开GK1时,B运行,A不运 行;当长物体后端离开GK2 时,A、B都不运行。
SET M200
6.3.6各种编程方式的比较 1 编程方式的通用性 2 不同编程方式设计的程序长度比较 3 电路结构及其他方面的比较 STL指令的优点
6---4 具有多种工作方式的系统的编程方式
连续 (全自动循环运行)
自动
单周期 (间断周期运行) 单步 (自动运行试车)
手动
(1)调试 (2)自动参数的测定 (3)自动运行时突发情况的状态调整 (4)非标准操作
T1 T1
梯形图程序的设计

X0
X2 X1 Y1 Y0 正转
SB2
Y0
X1
X2 X0 Y0 Y1
Y1
反转
COM
COM1
AC 220V
安全保护: 安全保护:输出线圈互锁、按钮互锁
M7
M8
C0加1 C0加
C0已剪完10块 C0已剪完 块 已剪完10
5) 顺序功能图中的基本规则 转换实现的条件 (1)该转换所有的前级步都是活动步 该转换所有的前级步都是活动步 前级步都是 (2)相应的转换条件得到满足 相应的转换条件 转换条件得到满足 转换实现应完成的操作 (1)使所有由有向连线与相应转换符号 相连的后续步都应变为‘活动’ 相连的后续步都应变为‘活动’; (2)使得所有有向连线与相应转换符号 相连的前级步都变为不活动步 不活动步。 相连的前级步都变为不活动步。
M
输出 电路
Y
1) 概述 顺序功能图( 顺序功能图(Sequential Function Chart):状态转移 hart) 图或功能表图,它是一种通用的技术语言。 图或功能表图,它是一种通用的技术语言。 1987年IEC(国际电工委员会 1987年IEC(国际电工委员会):IEC848 国际电工委员会) 1994年IEC(国际电工委员会 1994年IEC(国际电工委员会):IEC1131 国际电工委员会) 顺序功能图编程: 顺序功能图编程: 步、有向连线、转换、转换条件和动作(或命令) 有向连线、转换、转换条件和动作(或命令)
步10 步3
c步4Leabharlann 步116) 绘制顺序功能图的注意事项 两个步绝对不能直接 两个步绝对不能直接相连,必须用一个转换将它们隔开; 直接相连,必须用一个转换 转换将它们隔开; 两个转换绝对也不能直接相连,必须用一个步 两个转换绝对也不能直接相连,必须用一个步将它们隔开; 顺序功能图中的初始步一般对应系统的等待启动的初始状态; 顺序功能图中的初始步一般对应系统的等待启动的初始状态; 自动控制系统应能多次重复执行同一工艺过程(封闭); 自动控制系统应能多次重复执行同一工艺过程(封闭); 在单序列中,只有当某一步的前级步是活动时,该步才可能编 成活动步(M8002)。 成活动步(M8002)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X0 X2 X4 Y0
Y1
左行
Y2 T0 K100
装料
Y3
卸料
T1 K150
21
2 、设计实例二 报警电路的PLC程序设计
➢当报警继电器K=ON,报警灯闪烁,蜂鸣 器叫
控制要求
➢当报警响应按钮SB1按下时,报警灯常 亮,蜂鸣器停叫
➢当报警灯测试按钮SB2按下时,报警灯亮
22
解:
(1)输入/输出接点分配见表
二、 顺序控制设计法的基本思想
STEP 步
有向连线
转换
转换条件 动作或命令
将系统的 一个工作 周期划分 为若干个 顺序相连
的阶段
步与步之间 的连线,如 果进行方向 是从上到下 或从左到右 ,箭头可以
不画
有向连 线上垂 直的短 线,旁 边标注 转换条
件
使系统 由前级 步进入 下一步 的信号 称为转 换条件
第6章 梯形图程序的设计方法
6---1 梯形图设计基础
一、梯形图设计的基本步骤
根据控制系统的控制要求和内容确定PLC机型
➢分析被控对象的具体情况(生产过程,技术特点,工艺方 法,环境条件),研究对控制系统的要求;
➢根据被控对象状态参数的数目和被采集信号的数目,确定
PLC的输出/输入点数,以此作为选择PLC机型的条件 ;
➢根据被采集及被控制信号的特点(数字量,模拟量)以及
所需电源的情况,确定输入器件,输出执行器件及接线方式。
结合上面的条件选择PLC的型号 。
1
整体概述
概况一
点击此处输入相关文本内容 点击此处输入相关文本内容
概况二
点击此处输入相关文本内容 点击此处输入相关文本内容
概况三
点击此处输入相关文本内容 点击此处输入相关文本内容
8
一个触点不允许有双向电流通过。
编程规则五
9
当两个逻辑行之间互有牵连时,可按图示的方法加 以改画
编程规则六
10
6---2 梯形图的基本电路 一、 起动、保持和停止电路(起保停)
X1
X2 Y1
X1
X2
Y1
Y1
11
Q FU
KM1 KH
M 3~
6---2 梯形图的基本电路
二、 三相异步电动机正反转控制电路
X1
X0
X1 Y1
Y1
COM
18
6---3 梯形图的经验设计法
在一些典型电路的基础上,根据被控对象对控制系 统的具体要求,不断修改和完善梯形图,多次反复调试 和修改梯形图的设计方法。
(1)具有试探性和随意性;
特
点
(2)最后的结果不是唯一的 ;
(3)设计所用的时间和质量因设计者的经验
而异。
19
1 、设计实例一
M8002
2
设计PLC的输入/输出信号连接图 编写程序 输入并编辑程序 程序调试 程序存储
3
二、梯形图设计规则
梯形图按PLC在一个扫描周期内扫描程序的顺序,从 左到右、从上到下的顺序进行绘制。与右边线圈相连的 全部支路组成一个逻辑行 ➢逻辑行起于左母线,终于右母线(或终于线圈,或一 特殊指令)
➢不能在线圈与右母线之间接其他元件
T1 K30
T1
Y0
Y0
2S 3S 2S 3S 2S
16
三 、 定时器和计数器的应用程序 接通/断开延时电路
X0
T0 K90
Y1 X0 T1 K70
T0 T1
Y1
Y1
X0 Y1 T0的常开触点 T1的常开触点
9S
7S 17
四 、常闭触点输入信号的处理
PLC
X0
X0
X1 Y1
X1
Y1
COM
PLC
X0
KH
SB3 SB1
KM2
KM1 SB2
KM2
KM2 KM1 KM1 KM2
12
6---2 梯形图的基本电路
二、 三相异步电动机正反转控制电路
正转启动
SB2 X0
Y0
反转启动
SB3 X1
Y1
停止
SB1 X2
COM COM1
KM1 KM2
FR
KM2 KM1
负载电源
13
6---2 梯形图的基本电路
二、 三相异步电动机正反转控制电路
X0
X2 X1 Y1 Y0
正转
Y0
X1
X2 X0 Y0 Y1
反转
Y1
14
三 、 定时器和计数器的应用程序
定时 范围 的扩展
X2 T0 T0 K6000
X2
RST C0
T0
C0 K6000
C0
Y0
X2 1000 h
Y0 15
三 、 定时器和计数器的应用程序
闪烁电路
X0 T1 T0 K20
X0
T0
T0
送料小车在限位开关X4处装料,10S后结束 然后右行,碰到X3后停下来卸料,15S后左 行,碰到X4后,又停下来装料,这样不停地 循环工作,直到按下停机按钮。
Y1左行
Y0 右行
X4
X3
20
X0
1 控制
系统的梯
T1
形图设计
Y1
X4
X3
X1 X2 X3 Y1
Y0
右行
输入装置
PLC输入端子号
K
X000
输出装置 报警灯
SB1
X001
蜂鸣器
SB2
X002
PLC输出端子号 Y030 Y031
23
(2)控制逻辑梯形图见图
报警电路的梯形图
24
(3)指令程序
LD ANI OUT
K LD OUT K
X000 T3 T2 20 T2 T3 10
LDI OR AND OR OUT LD OR
➢编程顺序如图所示。一个逻辑行编程顺序则是从上到 下,从左到右进行
4
梯形图编程规则一
5
触点应画在水平支路上,不能画在垂直支路上
(a)
(b)
编程规则二
(a)不正确 (b) 正确
6
几条支路并联时,串联触点多的,安排在上面(先 画)
编程规则三
7
几个支路串联时,并联触点多的支路块安排在左面,
编程规则四
T2 M100 X000 X002 Y030 X001 M100
AND OUT LD ANI OUT END
X000 M100 X000 M100 Y031
25
6---4 根据继电器电路设计梯形图方法
步骤:
(1)了解被控设备的工艺工程和机械的动作情况; (2)确定PLC的输入信号和输出负载,画出外部
每一步 所完成 的工作
31
状态转移图表示法
32
顺序功能图与波形图
33
6---5 顺序控制设计法与顺序功能图
二、 顺序控制设计法的基本思想
X
经验设计法
Y 梯形图
X控
顺序控制设计法
制 电
路
输Y 出
电
路
34
三、 顺序控制设计中的顺序功能图绘制
1、 概述
顺序功能图
又叫做状态转移图或功能表图, 它是描述控制系统的控制过程、 功能和特性的一种图形。
接线图; (3)确定时间继电器 中间继电器 定时器 ; (4)根据对应关系画出梯形图程序。
26
27
28
29
6---5 顺序控制设计法与顺序功能图
一 、用经验设计法设计梯形图存在的问题
(1)设计方法很难掌握,设计周期长; (2)装置交付使用后维修困难。
30
6---5 顺序控制设计法与顺序功能图