【IT专家】在Ubuntu系统基于ROS使用废旧Android手机摄像头获取视频流(rtsp
【IT专家】yolo模型移植到android手机端
本文由我司收集整编,推荐下载,如有疑问,请与我司联系yolo模型移植到android手机端2017/08/18 665 之前写了android demo在手机上的运用,但是模型都是官方给的,想要替换成自己的模型,因此尝试了下将自己训练的yolo模型来替换demo给的模型。
首先,darknet的训练和.weight文件到.pb文件的转化,以及android demo 的实现见之前的博客。
在此不再叙述sdk,nkd等配置问题,且直接使用.pb文件。
其次,默认已安装android studio。
(1)终端进入(android安装目录)/bin,输入./stuodio.sh开启android studio (2)点击new,import project导入(tensorflow所在路径)/tensorflow/examples/android文件夹(可连接手机先run,保证demo能够正常运行后再行修改) (3)将build.gradle中68行的bazelLocation改为自己bazel的路径:def bazelLocation = ‘/home/seven/bin/bazel’185行apply from: “download-models.gradle”注释掉,并在第112行,增加//*/(不然后面的内容都被当做注释了): if (nativeBuildSystem == ‘bazel’ || nativeBuildSystem == ‘makefile’) { // TensorFlow Java API sources. java { srcDir ‘../../java/src/main/java’ exclude ‘**/examples/**’//*/ } // Android TensorFlow wrappers, etc. java { 最后,将第76行开始的内容改为自己需要的版本号: android { compileSdkVersion 25 buildToolsVersion “26.0.1” if (nativeBuildSystem == ‘cmake’) { defaultConfig { applicationId = ‘org.tensorflow.demo’ minSdkVersion 21 targetSdkVersion 25 ndk { abiFilters “${cpuType}” } (4)将转化得到的.pb文件放在(tensorflow所在路径)/tensorflow/examples/android/assets文件夹内,为方便起见,可将此.pb重命名为graph-tiny-yolo-voc.pb。
ros中camera_calibrarion原理

ros中camera_calibrarion原理一、概述:ROS中的camera_calibration节点在ROS(Robot Operating System)中,camera_calibration节点是一个非常实用的工具,用于对摄像头进行标定。
通过对摄像头进行标定,我们可以获取摄像头的内部参数(如焦距、主点坐标等)和外部参数(如旋转矩阵和平移向量等),从而使得ROS中的计算机视觉算法能够更加准确地处理图像数据。
二、camera_calibration原理介绍1.针孔相机模型camera_calibration基于针孔相机模型,该模型描述了光线如何通过相机成像。
在这个模型中,相机矩阵、投影矩阵和基础矩阵是三个关键参数。
2.相机标定过程camera_calibration节点通过以下步骤进行相机标定:(1)采集图像:在不同的位置和姿态下,使用已知形状的物体(如棋盘格)来拍摄多幅图像。
(2)图像处理:对采集的图像进行预处理,如去噪、灰度化、边缘检测等。
(3)特征点提取:从处理后的图像中提取特征点,如角点、边缘点等。
(4)计算相机矩阵:利用标定板上的已知几何信息,通过最小二乘法计算相机矩阵。
(5)优化标定参数:根据多次拍摄的图像,使用非线性优化算法(如Levenberg-Marquardt算法)对相机矩阵进行优化。
3.标定参数的应用标定后的相机参数可以用于:(1)3D重建:通过标定后的相机矩阵,可以恢复场景中的三维信息。
(2)图像校正:根据标定后的相机参数,可以对图像进行畸变校正,提高图像质量。
(3)视觉定位:利用标定后的相机参数,可以实现目标物体的精确定位。
三、camera_calibration节点用法1.创建相机标定对象在ROS中,可以使用`calibrate_camera_node`节点进行相机标定。
首先,在launch文件中启动该节点,并设置相应的参数,如相机名称、标定图像数量等。
2.采集图像并处理在标定过程中,需要采集多幅带有标定板的图像。
【IT专家】Ubuntu 下 adb 连接手机调试android程序失败 终极解决方法

本文由我司收集整编,推荐下载,如有疑问,请与我司联系Ubuntu 下adb 连接手机调试android程序失败终极解决方法2014/02/17 2212 Ubuntu 下adb 连接手机调试今code完毕,发现手机连接突然出现问题,logcat无输出,adb devices后发现手机连接有问题。
手机连接状态:手机端,android系统,已打开debug模式,并且状态栏显示“已连接USB”调试; 电脑端,Ubuntu系统,adb devices,无连接信息 首先想到Window上很多adb连接错误是应为端口被占问题,因此查看端口情况: changxing@changxing-ThinkPad-T410:~/Client$ ps -aux | grep adbWarning: bad ps syntax, perhaps a bogus ‘-’? See procps.sf/faq.htmlroot 6978 0.0 0.0 4684 940 pts/0 T 20:25 0:00 adb logcat -v processroot 6979 0.0 0.0 31316 1372 pts/0 Tl 20:25 0:00 adb -P 5037 fork-server serverroot 7052 0.0 0.0 4548 952 pts/0 T 20:26 0:00 adb tcpiproot 7063 0.0 0.0 4548 952 pts/0 T 20:27 0:00 adb get-state1000 7337 0.0 0.0 13612 940 pts/0 S+ 20:33 0:00 grep adbroot 6978 0.0 0.0 4684 940 pts/0 T 20:25 0:00 adb logcat -v process ps 命令解析: 1)ps -a 显示现行终端机下的所有程序,包括其他用户的程序。
机器人操作系统(ROS)及仿真应用_课件 第1章 Linux Ubuntu入门基础
第1章 Linux Ubuntu入门基础
1.1 Ubuntu 简介
第 1
1.2 安装Ubuntu 20.04
章
1.3 Ubuntu 20.04使用入门
1.4 本章小结
1.3 Ubuntu 20.04使用入门
Ubuntu系统初始界面如下:
屏幕左侧为收藏夹,默认图标 按钮共有7个,从上至下分别是: [Firefox网络浏览器]、[Thunderbird 邮件/新闻]、[文件]、[Rhythmbox] 、 [LibreOffice Writer] 、 [Ubuntu Software]、[帮助]。
Байду номын сангаас
章
1.3 Ubuntu 20.04使用入门
1.4 本章小结
1.2 安装Ubuntu20.04
对Ubuntu的安装有两种方式,一种是双系统安装,另 外一种是虚拟机安装。因在虚拟机里运行Ubuntu容易出现卡 顿现象,本节只介绍双系统安装,即在现有的Windows10系 统下如何正确安装Ubuntu 20.04系统。
第1章 Linux Ubuntu入门基础
1.1 Ubuntu 简介
第 1
1.2 安装Ubuntu 20.04
章
1.3 Ubuntu 20.04使用入门
1.4 本章小结
1.4 本章小结
本章内容是学习ROS之前的必备先修知识,首先对Ubuntu的安 装方法进行了详细介绍;接着对Ubuntu两种工作模式进行了比较, 命令行工作模式需要记忆很多命令,但对系统资源要求比较低,并 且效率远远高于图形化界面模式;最后对命令行工作模式的常用命 令进行了介绍。
Ubuntu是一个基于Debian架构,以桌面应用为主的Linux操作系统。 由于Linux Ubuntu是开放源代码的自由软件,用户可以登录Linux Ubuntu 的官方网址免费下载该软件的安装包。
基于树莓派的安卓视频监控
基于树莓派的安卓视频监控(v1.1)顺应潮流,我最近也在玩Android编程。
买了本《疯狂Android讲义》,看了几天,觉得应该弄个小项目练练手,就想能不能在安卓上实现视频监控呢?之前已经实现了mjpg-streamer的网络视频监控。
网络上也有做WiFi小车的论坛,他们已经实现了安卓端的程序,里面就包含远程视频显示。
下载他们的早期版本开始研究(最新版不开源),发现和mipg-streamer网络视频监控原理基本一样。
理解了他们的程序,就开始动手自己实现一个吧!因为我是初学者,对安卓编程还没啥概念,因此我定下了如下目标:1)功能尽量简单,仅仅实现一个监控功能;2)尽量做稳定分为三部分:mjpg-streamer原理、jpg编码格式、Android程序说明。
一、mjpg-streamer原理我们既然用了mjpg-streamer,应该了解一下他的实现。
理解了mjpg-streamer,后面Android部分的jpg数据帧处理就容易了。
因为没有啥文档,直接看他的源代码吧。
先来看看我们打开mjgp-streamer的命令./mjpg_streamer -i "./input_uvc.so -d /dev/video0 -r 640*480 -f 5" -o "./output_http.so -p 9090 -w ./www"这条命令使用了./input_uvc.so和./output_http.so两个动态程序,和windows下的动态库是一个道理。
mjpg_streamer是主程序,负责初始化输入(从摄像头读取jpg数据帧)和初始化输出(http服务器端)。
input_uvc.so负责采集摄像头数据,input_uvc中的input_init由主程序mjpg-streamer调用初始化,然后mjpg-streamer继续调用input_run启动cam_thread线程。
【IT专家】ubuntu 下正确安装android手机驱动

本文由我司收集整编,推荐下载,如有疑问,请与我司联系ubuntu 下正确安装android手机驱动2013/12/05 0 charlesxue@THSHIBA:~/setup/cocos2d-x/cocos2d-x-2.1.4/projects/simpleGame/proj.android/bin$ lsusbBus 001 Device 002: ID 10f1:1a19 Importek Bus 001 Device 003: ID 0bda:0159 Realtek Semiconductor Corp. Digital Media Card ReaderBus 002 Device 005: ID 05c6:9031 Qualcomm, Inc. Bus 002 Device 003: ID 0bda:8197 Realtek Semiconductor Corp. RTL8187B Wireless AdapterBus 006 Device 002: ID 062a:4101 Creative Labs Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hubBus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hubBus 003 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hubBus 004 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hubBus 005 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hubBus 006 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hubBus 007 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hubBus 008 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub 想知道哪个是手机的usb口,很简单的办法就是插上手机执行一下lusb命令,然后拔掉手机再次执行一下lusb比较一下打印结果。
ROS安装及配置教程2
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
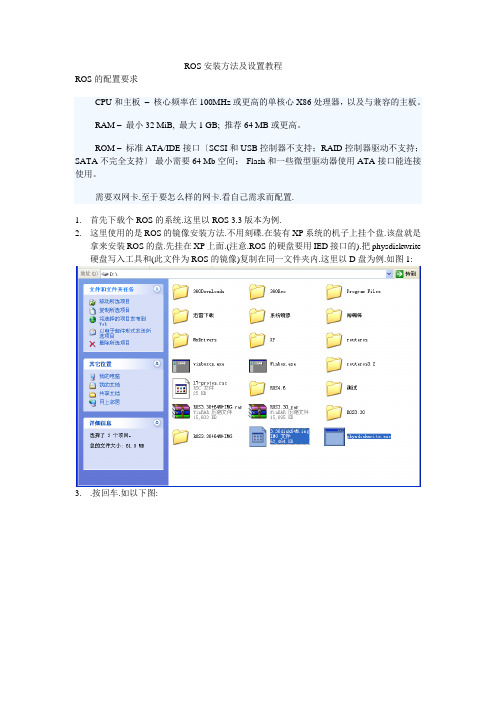
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
ros编程项目案例
ros编程项目案例ROS(Robot Operating System)是一种开源的机器人操作系统,提供了一系列的库和工具,用于帮助开发者构建机器人应用程序。
在ROS编程中,开发者可以使用C++或Python等编程语言进行开发,实现机器人的感知、控制、导航等功能。
下面是一些符合题目要求的ROS编程项目案例:1. 智能巡线车:使用ROS和视觉传感器,实现一个能够自主巡线并避障的智能小车。
通过摄像头获取实时图像,在ROS中进行图像处理,识别巡线路径并控制小车沿路径行驶。
2. 智能家居控制系统:利用ROS和各种传感器(如温度传感器、湿度传感器、光照传感器等),实现一个智能家居控制系统。
通过ROS 中的节点通信机制,实时获取传感器数据,并根据预设的规则控制家居设备的开关。
3. 自主导航机器人:利用ROS和激光雷达等传感器,实现一个能够自主导航的机器人。
通过激光雷达获取环境地图,并使用SLAM算法进行建图和定位,然后使用导航算法规划路径,实现机器人的自主导航功能。
4. 机器人视觉导航:利用ROS和深度学习算法,实现一个能够通过视觉感知进行导航的机器人。
通过摄像头获取实时图像,在ROS中进行图像识别和目标检测,然后使用导航算法规划路径,实现机器人的视觉导航功能。
5. 机器人语音控制:利用ROS和语音识别技术,实现一个能够通过语音进行控制的机器人。
通过麦克风获取语音输入,在ROS中进行语音识别,然后根据识别结果执行相应的控制命令,实现机器人的语音控制功能。
6. 机器人物体抓取:利用ROS和机械臂控制算法,实现一个能够自主抓取物体的机器人。
通过深度摄像头获取物体的三维信息,在ROS中进行目标检测和位置估计,然后使用机械臂控制算法控制机械臂进行抓取动作。
7. 机器人编队控制:利用ROS和无线通信技术,实现一个能够实现编队控制的多机器人系统。
通过ROS中的通信机制,实现多个机器人之间的数据传输和协调,实现编队控制算法,使机器人能够协同工作完成任务。
Ubuntu下编译Android源码并运行Emulator2
Ubuntu下编译Android源码并运行Emulator2Ubuntu下编译Android源码并运行Emulator2在Ubuntu上编译和运行Android源码并运行Emulator需要一些准备工作和步骤,下面是详细的步骤说明。
准备工作:1.安装必要的依赖项:- Java Development Kit (JDK): 通过运行`sudo apt-get install openjdk-8-jdk`命令安装Java开发工具包。
- Git: 运行`sudo apt-get install git`命令安装Git。
- 必要的库和工具: 运行`sudo apt-get install libx11-dev libxext-dev libxi-dev libxrender-dev libxtst-dev libxt-dev libcups2-dev libncurses5-dev libgnome2-0 libgnomeui-0 libgtk2.0-0 libatk1.0-0 libbonoboui2-0 libcairo2 libfontconfig1-devlibxslt-dev libxml2-dev libcurl4-openssl-dev libusb-1.0-0-dev libgtk2.0-bin libdbus-1-dev libdbus-glib-1-dev libgconf2-dev libnss3-dev automake libtool pkg-config`命令安装必要的库和工具。
2. 安装Repo及相关工具:编译源码:1. 初始化环境:运行`. build/envsetup.sh`命令初始化环境。
2. 选择目标设备:运行`lunch`命令选择目标设备,例如选择"2.修改设备名-eng"即选择修改设备名为eng类型的目标设备。
3. 编译源码:运行`make -j4`命令开始编译源码,-j4参数可以指定并行编译的线程数,可以根据系统配置适当调整。
ros测试方法
ros测试方法一、ros测试的重要性。
1.1 ros在机器人领域那可是相当重要的存在。
就好比是机器人的大脑中枢,指挥着机器人的一举一动。
如果ros出了问题,机器人就可能像没头的苍蝇一样乱转。
所以对ros进行测试就像是给机器人的大脑做体检,必须得重视起来。
1.2 从实际应用的角度看,不管是工业机器人在生产线上精准操作,还是服务机器人在家庭中贴心服务,ros要是不稳定,那整个工作或者服务就会乱套。
这就像盖房子,ros是地基,如果地基不稳,房子早晚会塌。
二、ros测试的基本方法。
2.1 功能测试。
这是最基本的测试方法。
就像检查一个人能不能正常走路、说话一样。
对于ros,我们要测试它的节点是否能正常启动、话题是否能正常发布和订阅、服务是否能正常调用。
比如说,在一个简单的机器人导航ros系统里,我们要看看定位节点能不能准确获取机器人的位置信息,要是获取不到或者获取错误,那机器人就没法在正确的路线上行驶,就像汽车没了导航一样抓瞎。
2.2 性能测试。
这可不能含糊。
性能就像是ros的体能。
我们得看看ros在处理大量数据或者高频率任务的时候,反应速度怎么样。
就好比一个运动员,在高强度比赛下能不能发挥正常水平。
比如在一个监控机器人系统中,如果ros处理图像数据的速度太慢,那监控画面就会卡顿,就像看老电视信号不好的时候,画面一卡一卡的,急死人。
2.3 兼容性测试。
现在的机器人系统往往不是孤立的,就像人在社会中要和各种各样的人和事物打交道一样。
ros要和不同的硬件、软件配合。
兼容性测试就是要确保ros和各种传感器、执行器以及其他软件能和谐共处。
例如,一个新的摄像头要接入ros系统,如果不兼容,那就像两个人说不同的语言,根本没法交流,摄像头采集的图像信息就不能被ros有效利用。
三、ros测试的注意事项。
3.1 测试环境的搭建。
这就像给ros测试搭建一个舞台。
测试环境要尽可能接近实际的使用环境。
不能在温室里测试,到了实际环境就不行了。
ubuntu的提取方式

ubuntu的提取方式Ubuntu 是一种流行的开源操作系统,提取方式通常指的是从网络或其他存储设备上获取 Ubuntu 安装文件或镜像的方法。
这个过程可以通过多种途径完成,下面我会从多个角度来介绍 Ubuntu 的提取方式。
首先,你可以从 Ubuntu 官方网站上下载 Ubuntu 的镜像文件。
在官方网站上,你可以找到不同版本和不同版本的 Ubuntu,包括桌面版和服务器版。
你可以选择适合你需求的版本,然后下载对应的镜像文件。
下载完成后,你可以使用解压缩工具(如 7-Zip 或WinRAR)来提取镜像文件中的内容。
其次,如果你想在虚拟机中安装 Ubuntu,你可以使用虚拟机软件(如 VirtualBox、VMware Workstation 等)来创建一个新的虚拟机,并在创建虚拟机的过程中选择提取已下载的 Ubuntu 镜像文件作为虚拟机的安装源。
在虚拟机启动时,镜像文件的内容将被提取并用于安装 Ubuntu 操作系统。
另外,如果你已经有一个 Ubuntu Live CD 或 Live USB,你可以通过将其插入计算机并从中启动来提取其中的内容。
在启动过程中,你可以选择进入 Live 环境,然后在其中使用文件管理器等工具来访问 Live CD 或 Live USB 中的文件并将其提取到计算机的硬盘上。
此外,如果你是在一个已经安装了 Ubuntu 的计算机上进行提取操作,你可以直接使用文件管理器或命令行工具来访问 Ubuntu 的文件系统,并从中提取你需要的文件或目录。
这种方式适用于从已安装的 Ubuntu 系统中提取个人文件、配置文件等情况。
总的来说,Ubuntu 的提取方式取决于你的具体需求和情境,可以通过下载镜像文件、在虚拟机中安装、使用 Live CD/USB 或直接在已安装系统中提取等多种途径来实现。
希望这些信息能够帮助你更好地理解 Ubuntu 的提取方式。
roscanopen的使用方法

RoScanopen的使用方法1. 介绍RoScanopenRoScanopen是一种用于演示和展示的开发工具,可以帮助用户在Android设备上快速、便捷地实现屏幕录制、投屏、画中画、换台等功能。
它可以广泛应用于教育、商务、游戏、体育等领域,为用户提供高效、便捷的展示方式。
2. 下载与安装RoScanopen用户可以通过访问RoScanopen官方全球信息湾或者应用市场,下载RoScanopen的安装包。
安装包大小较小,可以快速下载并安装到用户的Android设备上。
3. 配置RoScanopen安装完成后,用户需要对RoScanopen进行简单的配置。
用户可以根据自己的需求,选择是否开启画中画、投屏等功能,并设置相应的参数。
4. 使用RoScanopen进行屏幕录制用户可以通过点击RoScanopen的屏幕录制按钮,开始进行屏幕录制。
在录制过程中,用户可以随时暂停、停止录制,并对录制的视频进行编辑。
5. 使用RoScanopen进行投屏RoScanopen还提供了投屏功能,用户可以将自己的屏幕内容投射到其他设备上,实现内容共享和展示。
6. 使用RoScanopen进行画中画用户可以利用RoScanopen的画中画功能,实现同时展示多个画面的效果。
比如在教育演示中,可以同时展示课件内容和讲解人员画面,提高观众的学习效果。
7. 使用RoScanopen进行换台RoScanopen还提供了换台功能,用户可以通过简单的操作,切换到另一个展示模式,实现更加灵活的展示方式。
比如在商务演示中,可以通过换台功能,实现不同内容的快速切换,提高演示效果。
8. 总结RoScanopen是一款功能强大、操作简便的演示工具,可以满足用户在各种场景下的展示需求。
用户可以根据自己的需要,灵活选择RoScanopen提供的功能,并使用其进行高效的展示和演示。
希望通过本文的介绍,读者可以更好地了解和掌握RoScanopen的使用方法,从而更好地利用这款工具。
android cameradevice用法 -回复

android cameradevice用法-回复Android CameraDevice用法指的是在Android操作系统中,通过使用CameraDevice API来控制和操作设备上的相机。
CameraDevice API提供了许多功能,包括启动相机、预览图像、拍照以及设置相机参数等。
本文将一步一步回答关于Android CameraDevice用法的问题,帮助读者了解如何使用该API来实现各种相机功能。
1. 什么是CameraDevice?CameraDevice是Android相机架构中的一个关键组件,是与硬件相机设备进行交互和通信的接口。
它通过提供方法来管理相机资源、控制相机参数和处理相机数据等。
在应用程序中,可以使用CameraManager类来获取CameraDevice实例。
2. 如何获取CameraManager实例?要获取CameraManager实例,可以调用Context.getSystemService()方法,并传入参数Context.CAMERA_SERVICE。
然后,可以通过此CameraManager实例来获取相机设备列表以及管理相机资源。
示例代码:CameraManager cameraManager = (CameraManager) context.getSystemService(Context.CAMERA_SERVICE);3. 如何获取相机设备列表?可以通过调用CameraManager的getCameraIdList()方法来获取相机设备列表。
该方法将返回一个包含所有可用相机设备ID的字符串数组。
示例代码:String[] cameraIds = cameraManager.getCameraIdList();4. 如何打开相机设备?调用CameraManager的openCamera()方法来打开相机设备,需要传入相机设备的ID、一个CameraDevice.StateCallback回调以及一个可选的Handler对象。
ros的调试和测试方法
ros的调试和测试方法
在ROS中,有一些常见的调试和测试方法,包括:
1. 使用roslaunch启动节点:roslaunch是一个用于启动ROS节
点的工具,可以在启动过程中指定参数、运行多个节点,并进行自动化测试和调试。
2. 使用rqt_console查看日志:rqt_console是ROS的图形化日
志查看工具,可以帮助开发者查看节点的运行日志,包括调试信息、警告和错误信息。
3. 使用rosbag录制和回放消息:rosbag是ROS的消息记录和
回放工具,可以将节点的输入和输出消息记录下来,以便离线分析和调试,或者在测试时回放以重现实验条件。
4. 使用rviz可视化工具:rviz是ROS的三维可视化工具,可
以帮助开发者实时查看节点的状态、消息发布和订阅情况,以及可视化传感器数据等。
5. 使用ROS自带的测试框架:ROS提供了一个单元测试框架,可以帮助开发者编写和运行单元测试用例,验证节点的功能和正确性。
6. 使用ROS调试工具:ROS提供了一些调试工具,如rosnode、rostopic、rosmsg等命令行工具,可以帮助开发者查看节点的
信息、发布和订阅话题,以及查看消息定义等。
7. 使用仿真环境:ROS提供了一些仿真环境,如Gazebo和Stage,可以在其中模拟机器人和传感器,进行虚拟实验和调试。
以上是一些常见的ROS调试和测试方法,根据具体的应用场景和问题,还可以结合使用其他工具和方法进行调试和测试。
ROS机器人操作系统

ROS机器人操作系统ROS(Robot Operating System)操作系统探索总结(一)ROS简介一、历史随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求。
2010年Willow Garage公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS的热潮。
ROS系统是起源于2007年斯坦福大学人工智能实验室的项目与机器人技术公司Willow Garage的个人机器人项目(Personal Robots Program)之间的合作,2008年之后就由Willow Garage来进行推动。
已经有四年多的时间了 (视频)。
随着PR2那些不可思议的表现,譬如叠衣服,插插座,做早饭,ROS也得到越来越多的关注。
Willow Garage公司也表示希望借助开源的力量使PR2变成“全能”机器人。
PR2价格高昂,2011年零售价高达40万美元。
PR2现主要用于研究。
PR2有两条手臂,每条手臂七个关节,手臂末端是一个可以张合的钳子。
PR2依靠底部的四个轮子移动。
在PR2的头部,胸部,肘部,钳子上安装有高分辨率摄像头,激光测距仪,惯性测量单元,触觉传感器等丰富的传感设备。
在PR2的底部有两台8核的电脑作为机器人各硬件的控制和通讯中枢。
两台电脑安装有Ubuntu和ROS。
二、设计目标ROS是开源的,是用于机器人的一种后操作系统,或者说次级操作系统。
它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,它也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。
ROS的首要设计目标是在机器人研发领域提高代码复用率。
ROS是一种分布式处理框架(又名Nodes)。
这使可执行文件能被单独设计,并且在运行时松散耦合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文由我司收集整编,推荐下载,如有疑问,请与我司联系在Ubuntu 系统基于ROS 使用废旧Android 手机摄像头获取视频流
(rtsp
2017/03/31 0 在Ubuntu 系统基于ROS 使用废旧Android 手机摄像头搭建监控设备
之前的博文介绍了一些使用Android 手机获取ROS 中传感器,图像以及控制机器
人小车的案例;
这里主要介绍如何让ROS 获取手机摄像头数据并使用,这样就不用usb_cam 等,并且大部分都有手机;
实验成本低,简洁易行。
手机端需要安装RTSP Server 等IP Camera 类型APP;
PC 配置为Ubuntu 16.04 + ROS Kinetic,(14.04+indigo 也可行)。
首先,下载功能包并配置,编译等,如下:
点击打开链接download.csdn/detail/zhangrelay/9799960
$ catkin_make
然后,source xxx/devel/setup.bash:
查看手机IP 地址,并配置:
export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://192.168.3.66:5540/ch0
注意,依据自己的端口和情况进行配置。
如有必要配置ACL 等。
这里用到的ROS 功能包是rocon_rtsp_camera_relay:
文件组织如下:
.├──CHANGELOG.rst├──CMakeLists.txt├──env-hooks│└──25.rocon-rtsp- camera-relay.sh.em├──include│└──rocon_rtsp_camera_relay│└──rocon_rtsp_camera_relay.hpp├──launch│└──rtsp_camera_unch├──package.xml├──rapps│└──image_stream│├──image_unch.xml│└──image_stream.rapp└──src ├──main.cpp └──rocon_rtsp_camera_relay.cpp7。