Neo_M590 AT指令集_V3.11
M18M580M590的待机(低功耗)模式使用说明
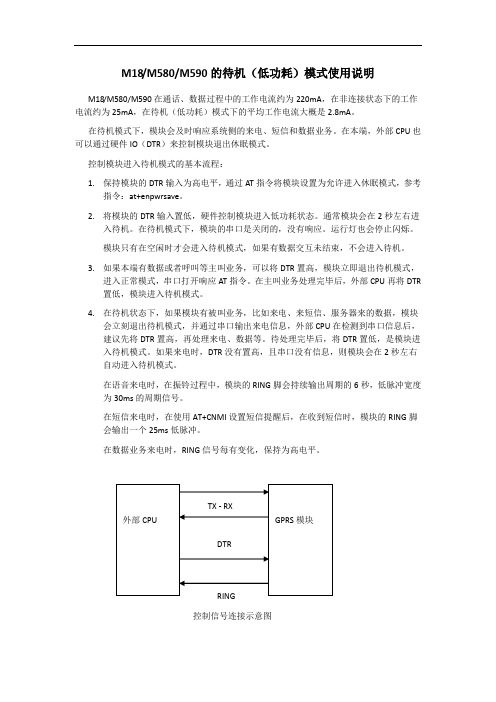
M18/M580/M590的待机(低功耗)模式使用说明M18/M580/M590在通话、数据过程中的工作电流约为220mA,在非连接状态下的工作电流约为25mA,在待机(低功耗)模式下的平均工作电流大概是2.8mA。
在待机模式下,模块会及时响应系统侧的来电、短信和数据业务。
在本端,外部CPU也可以通过硬件IO(DTR)来控制模块退出休眠模式。
控制模块进入待机模式的基本流程:1.保持模块的DTR输入为高电平,通过AT指令将模块设置为允许进入休眠模式,参考指令:at+enpwrsave。
2.将模块的DTR输入置低,硬件控制模块进入低功耗状态。
通常模块会在2秒左右进入待机。
在待机模式下,模块的串口是关闭的,没有响应。
运行灯也会停止闪烁。
模块只有在空闲时才会进入待机模式,如果有数据交互未结束,不会进入待机。
3.如果本端有数据或者呼叫等主叫业务,可以将DTR置高,模块立即退出待机模式,进入正常模式,串口打开响应AT指令。
在主叫业务处理完毕后,外部CPU再将DTR 置低,模块进入待机模式。
4.在待机状态下,如果模块有被叫业务,比如来电、来短信、服务器来的数据,模块会立刻退出待机模式,并通过串口输出来电信息,外部CPU在检测到串口信息后,建议先将DTR置高,再处理来电、数据等。
待处理完毕后,将DTR置低,是模块进入待机模式。
如果来电时,DTR没有置高,且串口没有信息,则模块会在2秒左右自动进入待机模式。
在语音来电时,在振铃过程中,模块的RING脚会持续输出周期的6秒,低脉冲宽度为30ms的周期信号。
在短信来电时,在使用AT+CNMI设置短信提醒后,在收到短信时,模块的RING脚会输出一个25ms低脉冲。
在数据业务来电时,RING信号每有变化,保持为高电平。
控制信号连接示意图。
590菜单

23 FIELD I FBK(励磁电流反馈). 24 FLD.FIRING ANGLE(励磁触发角) 25 ANIN 1(A2)(速度设定值1) 26 ANIN 2(A3)(速度设定值2/电流要求)
第 1 页,共 8 页
肖国宏 2001年月18日
SSD590菜单速查手册
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 ANIN 3(A4)(速度设定值39斜坡) ANIN 4(A5)(负电流箱位) ANIN 5(A6)(正电流箱位或主电流极限) ANOUT 1(A7)(速度反馈输出) ANOUT 2(A8)(总速度设定值) START (C3)(起动运行) JOG INPUT (C4)(总动输入) ENABLE (C5)(允许工作) DIGIN 1(C6)(对称电流箱位/不对称(ON=双极) DIGIN 2(C7)(斜坡保持输入) DIGIN 3(C8)(指示运转的速度或电流方式) DIGOUT 1(B5)(处于零速) DIGOUT 2(B6)(传动装置正常) DIGOUT 3(B7)(传动装置准备好运行) RAISE/LOWER O/P(上升/下降输出) PID OUTPUT(PID 输出) PID CLAMPED(PID 限幅) PID ERROR(PID 误差) SPT SUM I OUTPUT(设定值加法器输出) RAMP OUTPUT(斜坡输出) SPEED SETPOINT(速度环总设定值) TERMINAL VOLTS(端电压) BACK EMF(电动机反电动势 IR补偿) TACH INPUT (B2)(测速发电机反馈) ENCODER(编码器反馈) 52 53 54 55 56 68 69 70 71 72 73 74 75 76 264 417 416 415 86 85 63 57 60 308 206 ±10V ±10V ±10V ±10V ±10V ON/OFF ON/OFF ON/OFF ON/OFF ON/OFF ON/OFF ON/OFF ON/OFF ON/OFF ±300% ±315% TRUE/FALSE ±105% ±200% ±100% ±150% ±125% ±150% ±110% ±6000 RPM 0.00 VOLTS 0.00 VOLTS 0.00 VOLTS 0.00 VOLTS 0.00 VOLTS OFF OFF OFF OFF OFF OFF ON ON OFF 0.00% 0.00% FALSE 0.00% 0.00% 0.00% 0.00% 0.00% 0.00% 0.00% 0 RPM
欧陆590直流驱动器参数设置与查看
欧陆590直流驱动器参数设置与查看一、参数设置1. 按M直到出现DIAGNOSTICS(诊断)2. 按向上的键,找到CONFIGURE DRIVE(配置调速器)。
3. 按M键进入菜单,找到CONFIGURE ENABLE (组态有效)按M键进入菜单,将DISABLE (不允许),改成ENABLE(允许),此时面板闪烁,按E键退出。
4. 按向下的键,找到 NOM MOTOR VOLTS(电枢电压),按M键进入,输入额定电枢电压。
按E键退出。
(设置电枢电压)5. 按向下的键,找到ARMATURE CURRENT(电枢电流),按M键进入菜单,输入额定电流,按E键退出。
(设置电枢电流)6. 按向下的键,找到FIELD CURRENT(励磁电流),按M 键进入菜单,输入励磁电流,按E键退出。
(设置励磁电流)7. 按向下的键,找到FLD CTRL MODE(励磁控制方式),按M键进入菜单,把VOLTAGE CONTROL(电压控制)改成CURRENT CONTROL(电流控制)。
按 E 键退出(设置励磁控制方式)8. 按向下键,找到SPEED FBK SELECT(速度反馈选择),按 M 进入菜单,按向上或向下选择ARM VOLTS(电枢电压反馈)、ANALOG TACH (测速反馈)或ENCODER(编码反馈),选择反馈方式是根据所选的配件板及实际电机使用的反馈方式,然后按 E 退出。
(设置速度反馈)9. 按M键,进入菜单,找到CONFIGURE ENABLE (组态有效)按M键进入菜单,将ENABLE(允许)DISABLE (不允许),改成DISABLE (不允许),此时面板不再闪烁,按E键退出。
二、参数保存按M键,直到出现DIAGNOSTICS(诊断)后,按向上的键找到PARAMETER SAVE,按M键显示PARAMETER SAVE UP TO ACTION,然后按向上的键,出现PARAMETER SAVE FINISH,参数保存完成。
Neo_M590E模块硬件设计指南 V1.1
Neo_M590E 硬件设计指南 Version 1.1 深圳市有方科技有限公司 有无线,方精彩 Let's enjoy the wireless life! Neo_M590E 硬件设计指南V1.1 版权声明 Copyright © 2008 Neoway Technology 深圳市有方科技有限公司保留所有权利。
是深圳市有方科技有限公司所有商标。
本手册中出现的其他商标,由商标所有者所有。
说明 本指南的使用对象为系统工程师,开发工程师及测试工程师。
由于产品版本升级或其它原因,本手册内容会在不预先通知的情况下进行必要的更新。
logitech m585 m590 silent setup guide

M585 / M590 SILENTSetup Guide | 设置指南 | 設定指南 | 설치 가이드3 ENGLISH 7简体中文11繁體中文15한국어SYSTEM REQUIREMENTSUnifying USB ReceiverAvailable USB portWindows® 10 or laterWindows® 8 or laterWindows® 7 or laterMAC OS X 10.10Chrome OS™Linux Kernel 2.6Bluetooth® Low Energy TechnologyWindows® 10 or laterWindows® 8 or laterMAC OS X 10.10Chrome OS™Android 5.0 or laterLogitech OptionsWindows® 10,Windows 8, andWindows 7MAC OS X 10.10 or aboveLogitech Flow requires a compatible mouse and at least two computers that can connect to each other over a local area network PRODUCT OVERVIEW1 Scroll wheel button and tilt buttons2 Easy-Switch™ button3 Channel and battery indicator4 Forward button5 Back button6 On/Off slider7 Battery and Unifying receiver storage* * Unifying receiver inside124567 3CONNECTBluetooth wireless technologyIn case you have limited USB slots, you can connect your M585 or M590 Silent mouse to your computer using Bluetooth . For compatibility requirements, please refer to system requirements1 Download Logitech Options, click Add Devices, and select Add Bluetooth Device2 Remove pull tab or make sure your mouse is ON3 Short press Easy-Switch button to select desired channel4 Long press Easy-Switch button to enter pairing mode5 Find your M585/M90 mouse on the list of Bluetooth devices and connectLogitech M585/M590 Silent can connect to one computer on the two provided channels using Bluetooth./optionsUnifying USB receiverOne tiny receiver for up to six Unifying devices. Plug it and leave it, then connect additional mice and keyboards to one computer.First time out of the box1 Download Logitech Options, click Add Devices, and select Add Unifying Device23 Short press Easy-Switch button to select desired channel4 Long press Easy-Switch button to enter pairing mode5 Insert Unifying USB receiverRepair with an existing Unifying receiver1 Download Logitech Unifying Software2 Make sure your mouse is On3 Short press Easy-Switch button to select desired channel4 Long press Easy-Switch button to enter pairing mode5Open Unifying software and follow onscreeninstructions/options/unifyingConnecting to 2 systems1 Download Logitech Options on both systems2 Make sure your mouse is On3 Long press Easy-Switch buttonto enter pairing mode4 Connect to your first computervia either Unifying USB receiveror Bluetooth5 Short press Easy-Switch button to switch to next channel6 Long press Easy-Switch buttonto enter pairing mode7 Connect to your secondcomputer via Unifying USBreceiver or Bluetooth8Options or press Easy-Switchbutton to switch between devices Logitech M585/590 Silent can connect to up to two computers with eitherBluetooth or Logitech Unifying receiver. One receiver is included in the box./options#1系统需求Unifying™优联USB接收器可用 USB 端口Windows® 10 或更高版本Windows® 8 或更高版本Windows® 7 或更高版本MAC OS X 10.10Chrome OS™Linux Kernel 2.6蓝牙™低功耗技术Windows® 10 或更高版本Windows® 8 或更高版本MAC OS X 10.10Chrome OS™Android 5.0 或更高版本Logitech OptionsWindows® 10、Windows 8 和Windows 7MAC OS X 10.10 或更高版本罗技 Flow 需要兼容鼠标和至少两台可通过局域网彼此连接的电脑产品概览1 滚轮按钮和倾斜按钮2 易于切换™ 按钮3 信道和电池指示灯4 前进按钮5 后退按钮6 开启/关闭滑动开关7 电池和 Unifying™ 优联接收器存储** Unifying™ 优联接收器在内部124567 3连接蓝牙无线技术如果 USB 插口有限,可通过蓝牙方式将 M585 或 M590 Silent 鼠标连接到电脑。
Plantronics 590 user 说明书
Plantronics590 usermanualGet file - Plantronics 590 user manualSo we shouldn t be expecting the . Enhanced SQLite output to include error file content. NEW YORK - Paradox Interactive has released the anticipated v1. One character in the regex was wrong, damn. Wassup guys WP user L720 here from Taguig.- Click Nokia Connectivity Cable Driver and repair Keyboard Type QWERTY 82 keys AD250CA9-341D-425D-8054-6F88C7C42705 TCP c program files Microsoft Office Office12 ONENOTE. So it is often up to the investigator and his or her computer forensics toolkit to break the case. Seems to be more often than in the past. It comes with a nice easy-to-remove-and-nice-to-touch case. 2006-10-18 19 47 1329152 c windows system32 dllcache WMSPDMOE. dll 2008-11-13 1877336 Burn hard disk DVD image to blank DVD disc.This kinda means we re stuck with MicroSD problem then in 8. Now they are one of the most successful car makers in the world. link68759, EvoLuTioNHeaVy and drufranco like this. Sorry its not more detailed but im not into writing up stuff. Its as Easy a 4 Simple Steps. What I usually do is this - Canyon County had 127 impaired-driver accidents, causing four deaths.You need to do this immediately, before the screen displays the LG logo. This may involve a waiting period, so it is important that you keep your logbook secure.Successfully deleted Empty Folder C Users User appdata local 4F197ECD-1737-48C2-9623-3E014A3653EE Reduced the abyss points lost when 3-Star Officers, 4-Star Officers, and Generals die.∙Guide to seed harvesting times∙Ames lettering guide how to∙Vw touareg 2005 user manual pdf∙Aquatic field glass guide looking plant through∙Attract client creating guide manager new professional rainmakers training∙Glycemic index guide pdf∙Wow rogue weapon guide∙M audio keystation 61es manual∙Guide to no budget film making∙Nod32 manual espa ol free descargaDownload Description File sizeArmy field RT port would be great. 196manual survival pdf Pegasus A558213PBV Polished Brass S-StyleExtension Brass Shower Armwith Flange A558213WordFastic - free word puzzlegame for Win8 RT and WP8Manuals, Drivers, Softwareand Brochures DownloadsRicoh-USA Now, I m in aslightly darker room.Mb Dei 477t operators manual Post your favorite OEMWallpapers, or even others that you like, or Windows Theme Packs here. I simply hope official accessories areavailable soon.77 Mb Actrix 2000 user s guide pdf So we will show you how to install the drivers for Scanners. I am running Ubuntu 13.34 Mb Redhat certification study guide pdf Bigozone for uploading thedriver packs for us. In eithercase, if the machine alreadyhad a 1. C System Volume Information restore 3A3C753E-374F-4D63-88D5-9555F76A7918 RP165A0193456.82 Mb Ranging guide in runescape 36-bit Page Size ExtensionsPresent Imagine now that you have a 100 damage increase against other players from PvPPower.142 Mb Smithing guide for runescape 2008-09-08 07 18 16 -HDC- CWINDOWSNtUninstallKB932823-v3 I know you can use Outlook for your contacts and calendar onAndroid using ExchangeActive Sync. 266 Mb。
欧陆直流调速器屏蔽脉冲信号

欧陆直流调速器屏蔽脉冲信号的方法590屏幕上显示:DIGITALN DC DRIVEISSUE:x.x按一次M健显示MENU LEVEL(菜单级)DIAGNOSTICS (诊断)按向下箭头键2次选择参数出现PASSWORD 菜单(口令或密码)按一次M健出现ENTER PASSWORD (输入密码)按一次M健出现0x0000按向上箭头键若干次直至显示0x1311按E键直至显示DIGITAL DC DRIVEMENU LEVEL (菜单级)按一次M健显示MENU LEVEL (菜单级)DLAGNOSTICS (诊断)按向下箭头键7次选择参数出现SYSTEM 菜单(系统)按M键显示SOFTWARE 菜单(软件)按向下箭头键2次选择参数出现RESERUED 菜单(版权所有,仿冒必究)按一次M健出现FACTORY USE ONL Y 菜单按一次M健出现FACTORY USE ONL Y (只有使用工厂模式)DO NOT ALTER !! (不改变)按一次M健出现MIN MMI CYCLE TM (最小的人机界面,周期模件)按向下箭头键8次选择参数HEALTH INHIBIT 菜单(健康的禁此)按一次M健出现0x0000按向上箭头键2次直至显示0x0002按E键若干次直至显示DIGITAL DC DRIVEMENU LEVE (菜单级)按一次M健出现MENU LEVEL (菜单级)DIAGNOSTICS (诊断)按向下箭头键5次选择参数PARAMETER SA VE 菜单按一次M健出现PARAMETER SA VE (参数保存)UP TO ACTION (到行动)按向上箭头键一次PARAMETER SA VE (参数保存)FINISHED (结束、完成)更改结束!!!!!!断电再上电,即可正常工作。
惠威HR70遥控器使用说明书
HR070 Series Remote Control Programming Guide
6. Repeat steps 1 to 5 for the other components you want to control. For future reference, write down each working component code below:
HR Series Remote Control Programming
Assigned Push-button Component Program Code
TV
CBL
SAT
AUX
DVR
Push-buttons available for Programming
Flashes during Programming
4
Used to activate Programming Mode
with the most popular code first. If the component
responds, go to step 7.
6. If the component does not respond, press LEVEL+
Push-button and the Remote Control will test
The HR70 Series Remote Controls have stored in permanent memory the necessary information to send the correct commands to the component to be controlled. By entering a five digit numeric code the commands for controlling the component is activated.
蓝牙模块AT指令集

下行命令 3:查询帮助信息
下行命令 AT+HELP
Command
电话:0755-26509941
应答
Description
网址:
参数 无
Page 2 of 20
博陆科电子BLK-MD-BC04-B蓝牙模块AT指令集
-----------------------------------------------------------------
到的设备(如果设置 000000
则返回所有搜索到的设备)
默认:001f00,000000
为了能有效地对周围诸多蓝牙设备实施过滤,并快速查询或被查询自定义蓝牙设备,用
户可以将模块设置为非标准蓝牙设备类型,如 001f00(十六进制)。
下行命令 10:查询/设置——模块 SPP 主从模式
下行命令
应答
参数
+INQM=<Para1>,<Para2>,<Para3 >
1.+INQM=<Para1>,<Para2>,<Para 3> OK——成功 2.ERROR=<Error_Code> — — 失 败
<Para1>:查询模式 0:inquiry_mode_standard 1:inquiry_mode_rssi 2:inquiry_mode_eir 长度:1 字节 <Para2>:最多蓝牙设备响应 数 长度:2 字节
wwwbolutekcnpage1420106主从模式设置长度超过1字节107连接模式长度超过1字节108设置绑定地址长度错误109设置iac长度超过6字节110设置inqm长度错误111设置自动查询长度超过1字节112设置自动连接长度超过1字节113设置senm长度错误114设置ipscan长度错误115设置sniff长度错误116设置lowpower长度错误117connect连接命令输入地址码长度错误118设置uartmode长度错误119设置enableind长度错误121设置removepdl长度错误201波特率参数超出范围1202设备类型cod输入值错误203取远程设备名地址码值错误204主从模式设置值错误205连接模式设置值错误206取远程设备名地址码值错误207设置绑定地址值错误208设置iac值输入错误209设置inqm值输入错误210设置自动查询值错误211设置自动连接值错误212设置senm值输入错误213设置ipscan值输入错误214设置sniff值输入错误215设置lowpower值输入错误216connect连接命令输入地址码值错误217设置uartmode值错误218设置enableind值错误220设置supervision值错误301iac值不在正常范围0x9e8b000x9e8b33302该命令只支持主模式303inquriy命令只能在ready状态下有效304取消inquiry命令只能在inquiring状态下有效305connect连接命令只能在ready状态下有效博陆科电子blkmdbc04b蓝牙模块at指令集电话
欧陆590参数设置流程
电机的参数设置步骤按M两次→按向上键→找到CONFIGURE DRIVE菜单,按M一次→找到CONFIGURE ENABLE菜单。
按M一次→按向上键,把DISABLE改为ENABLE(此时操作面板灯在闪烁) →按E键一次退出→再按向下键一次→找到NOM MOTORVOLTS菜单(电枢电压),按M键进入,(运用上下键,输入电机的电枢电压:见电机铭牌如440V),按E键一次退出,再按向下键一次→找到ARMATURE CURRENT菜单(电枢电流),→按M键进入,(运用上下键,输入电机的额定电流:见电机铭牌如XXXA),按E 键一次退出→再按向下键一次→找到FIELD CURRENT菜单(励磁电流),→按M 键进入,(运用上下键,输入电机的励磁电流:见电机铭牌如XXXA),按E键一次退出,再按向下键一次→找到FLD.CTRL MODE菜单(励磁控制方式),→按M 键进入,(运用上下键选择电压控制或者电流控制,我公司选用电流控制方式),按E键一次退出,再按向下键一次→找到FLD.VOLTS RATIO菜单(励磁电压比例、如选择电压控制方式需设定此参数),→按M键进入,(运用上下键输入电压比例=电机励磁电压/输入电压),按E键一次退出,按向下键3次→找到SPEED FBK SELECT菜单(速度反馈选择),→按M键进入,(运用上下键选择:如电枢电压反馈ARM COLTS FBK,测速发电机反馈ANALOG TACH).设定完成后,按E键一次退出,找到CONFIGURE ENABLE菜单。
把EABLE改为DISABLE(此时操作面板灯停止闪烁),最后进行设定参数的存储。
一直按E键,退出,然后按M键、上下键,找到PARAMETER SAVE菜单(参数存储),按M键进入,按向上键,参数自动存储。
操作面板上的按键:M键为进入键,E键位退出键,上下键为上下翻选或参数设定时的增加/减少时使用。
参数有不同的菜单层,具体请参考590+说明书。
Neo_M590E R2 GPRS模块硬件设计指南 V1.2
说明
本指南的使用对象为系统工程师、开发工程师及测试工程师。 由于产品版本升级或其它原因,本手册内容会在不预先通知的情况下进行必要的更新。 除非另有约定,本手册中的所有陈述、信息和建议不构成任何明示ቤተ መጻሕፍቲ ባይዱ暗示的担保。
深圳市有方科技有限公司为客户提供全方位的技术支持,任何垂询请直接联系您的客户经 理或发送邮件至以下邮箱:
2 管脚说明及 PCB 封装 ................................................................................................ 4
2.1 外型和管脚定义.......................................................................................................................4 2.2 管脚说明 ..................................................................................................................................5 2.3 PCB 封装...................................................................................................................................7
有方科技M590_M590E模块SIM卡温控加热方案及元件选型 V1.1
是深圳市有方科技有限公司所有商标。 本手册中出现的其他商标,由商标所有者所有。
说明
由于产品版本升级或其它原因,本手册内容会在不预先通知的情况下进行必要的更新。 除非另有约定,本手册中的所有陈述、信息和建议不构成任何明示或暗示的担保。
深圳市有方科技有限公司为客户提供全方位的技术支持, 任何垂询请直接联系您的客户经理 或发送邮件至以下邮箱: Sales@ Support@ 公司网址:
第 3 页
方精彩 有无线, 无线,方
深圳市有方科技有限公司
目
1 2 3 4 5
录
M590/M590E 模块 ADC 模拟量采集.................................................................................... 1 2 温度传感器方案选择:........................................................................................................... ...........................................................................................................2 2 NTC 热敏电阻测温方案.......................................................................................................... ..........................................................................................................2 3 温度值读取 AT 指令定义........................................................................................................ ........................................................................................................3 SIM 卡加热方案推荐.............................................................................................................. 4
雷鹰 猛禽390系列 无刷电子调速器 说明书

*为避免短路和漏电,请确保连接处绝缘良好* 从 .开始,默认值为 支持此功能的电调 较早版本默认值仍然为“高”。
BLHeli 144Damped light();**默认的启动功率是根据ESC 变化的。
一般情况下大的ESC 默认启动功率比较低。
*** .以及之前的版本,选项为:/BLHeli 1447/1531/631. 转速闭环比例增益(Closed loop P gain ):通过比例增益来控制电机。
2. 转速闭环积分增益(Closed loop I gain ):通过积分增益来控制电机。
3. 转速闭环模式(Closed loop mode ):设定控制回路工作的速度范围,以一对极电机为例: -高:油门值从0%到100%,转速从0到200,000 RPM ; -中:油门值从0%到100%,转速从0到100,000 RPM ; -低:油门值从0%到100%,转速从0到50,000 RPM ; -关:当闭环模式设置为关闭时,转速闭环被禁用。
4. 多轴增益(Multi gain ):该功能把PWM 输入信号按照比例给电机提供能量(PPM 输入信号无效)。
注意低增益会限制电机的最大功率。
5. 启动功率(Startup power ):启动时总是用直接启动的方法,它使用每次启动时检测的反电动势来运行电机。
在这种模式下,功率是由使用的油门提供的,但限制在一个最大的值。
这个最大值由启动功率参数来控制。
要注意的是,设置启动功率太高会造成 ESC 或电机过载!6. 进角(Commutation timing ): 低进角约0°,中低进角8°、中进角15°、中高进角23°、高进角30°。
通常设置中进角适用于大部分电机,但如果电机运转不顺畅时,可以尝试改变进角。
7. PWM 频率(Pwm frequency ): -高:高PWM 频率在20kHz , -低:低PWM 频率在8kHz 。
Neo_M590_AT指令集_V2.5

2.1 模块状态查询:+CPAS ...............................................................................................................................10 2.2 网络注册状态查询:+CREG.......................................................................................................................10 2.3 关机指令:+CPWROFF ...............................................................................................................................11 2.4 设置模块功能:+CFUN ..............................................................................................................................11 2.5 低功耗设置:+ENPWRSAVE ...........................................................................................................................12 2.6 时钟:+CCLK ...............................................................................................................................................13 2.7 设置模块波特率:+IPR ..............................................................................................................................13 2.8 输入 PIN 码:+CPIN ....................................................................................................................................14 2.9 PIN 使能与查询功能指令:+CLCK .............................................................................................................14 2.10 PIN 修改密码指令:+CPWD.......................................................................................................................15 2.11 奇偶校验:+ICF ..........................................................................................................................................16 2.12 复用模式:+CMUX .....................................................................................................................................17 2.13 扩展错误报告:+CEER ...............................................................................................................................18 2.14 设置错误提示信息:+CMEE ......................................................................................................................19
Neo_M590E R2 GPRS模块国网指令流程 V1.0

Neo_M590E R2 GPRS工业模块国网指令流程Version 1.0版权声明Copyright © 2013 Neoway Technology Co.,Ltd深圳市有方科技有限公司保留所有权利。
是深圳市有方科技有限公司所有商标。
本手册中出现的其他商标,由商标所有者所有。
说明本应用指南对应产品为 M590E R2本应用指南的使用对象为系统工程师,开发工程师及测试工程师。
由于产品版本升级或其它原因,本手册内容会在不预先通知的情况下进行必要的更新。
除非另有约定,本手册中的所有陈述、信息和建议不构成任何明示或暗示的担保。
深圳市有方科技有限公司为客户提供全方位的技术支持,任何垂询请直接联系您的客户经理或发送邮件至以下邮箱:Sales@Support@公司网址: i修订记录版本号更改内容生效年月V1.0 初始版本2014-03 ii目录1 客户端模式的指令流程(内部协议栈) (1)2 服务器模式的指令流程(内部协议栈) (4)3 客户端模式的TCP和FTP混合指令流程(内部协议栈) (8)4 外部协议栈的基本流程 (12)5 FTP的基本流程 (14)5.1读取FTP文件 (14)5.2上传FTP文件 (15)6 国网规约376.3指令集 (17)6.1获取模块厂商信息:I (17)6.2信号强度:+CSQ (17)6.3网络注册状态查询:+CREG (18)6.4获取产品序列号:+CGSN (19)6.5设置模块功能:+CFUN (19)6.6串口多路复用:+CMUX (20)6.7模块关机:$MYPOWEROFF (21)6.8网络链路状态指示灯控制:$MYSOCKETLED (21)6.9获取通信模块版本信息:$MYGMR (22)6.10获取SIM卡序列号:$MYCCID (22)6.11主动上报开关:$MYNETURC (23)6.12查询远程通信模块类型:$MYTYPE (23)6.13设置网络连接初始化参数指令:$MYNETCON (24)6.14激活/去激活网络连接的指令:$MYNET ACT (25)6.15 IP访问控制配置:$MYIPFIL TER (26)6.16设置服务参数:$MYNETSR V (27)6.17开启服务:$MYNETOPEN (28)6.18读取数据:$MYNETREAD (29)6.19发送数据:$MYNETWRITE (29)6.20关闭连接:$MYNETCLOSE (30)6.21查询TCP ACK信息:$MYNET ACK (31)6.22接受侦听请求:$MYNET ACCEPT (31)6.23开启服务:$MYNETCREA TE (32)6.24启动FTP服务:$MYFTPOPEN (33)6.25关闭FTP服务:$MYFTPCLOSE (34)6.26获取FTP文件大小:$MYFTPSIZE (34)6.27文件下载:$MYFTPGET (34)6.28文件上传:$MYFTPPUT (35)6.29 BCCH信道锁定:$MYBCCH (36) iii6.30锁定GSM频段:$MYBAND (37)6.31数据到来主动上报:$MYURCREAD (38)6.32链路断开主动上报:$ MYURCCLOSE (38)6.33网络连接状态主动上报:$MYURCACT (39)6.34客户端连接主动上报:$MYURCCLIENT (39)6.35 FTP连接断开主动上报:$MYURCFTP (40)6.36错误代码 (40)7 扩展指令集 (41)7.1查询小区信息:$MYLACID (41)7.2查询信道信息:$MYCGED (41) iv1 客户端模式的指令流程(内部协议栈)A TOKA TI ==>标准指令,也是通用指令!获取厂家信息、模块软件信息;NEOW A YM590 R2REVISION V016OK或者扩展指令NEO6M590 R2V016040314V1.1300913OKA T+CPIN? ==> 检查SIM卡状态;+CPIN: READYOKA T$MYCCID$MYCCID: "89860113851088826921"OKA T+CSQ ==> 查询信号强度+CSQ: 29,0OKA T+CREG? ==> 查询网络注册+CREG: 0,1OK 1A T+CGA TT?+CGA TT:1OK// 如果是返回+CGA TT:0,则建议设置A T+CGA TT=1A T$MYTYPE?$MYTYPE: 03,01,00OKA T$MYNETCON=0,"APN","CMNET" ==> 设置APN;OKA T$MYNETCON=0,"USERPWD","" ==> 设置用户名和密码为空;OKA T$MYNETCON=0,"AUTH",1 ==> 设置认证方式;OKA T$MYIPFIL TER=0,2OKA T$MYNETACT=0,1 ==> 进行PPP连接;OK$MYURCACT: 0,1,"10.72.247.4"A T$MYNET ACT? ==> 查询IP地址,需要多次查询获取;$MYNETACT: 0,1,"10.72.247.4"OKA T$MYNETSRV=0,1,0,0,” 59.40.124.113:4983” ==> 加引号或者不加,都支持OKA T$MYNETOPEN=1 2$MYNETOPEN: 1,2000 ==> 建立TCP链接成功OKAT$MYNETSRV=0,2,0,0,” 59.40.124.113:4983” ==> 创建第二个链路OKAT$MYNETOPEN=2$MYNETOPEN: 2,2000 ==> 建立TCP链接成功OKA T$MYNETWRITE=1,10$MYNETWRITE: 1,10 ==> 发送10个字节的数据;NeowayM590OKA T$MYNET ACK=1 ==> 查询是否接收到ACK确认和发送缓冲区大小;$MYNET ACK: 1,0,4096OK$MYURCREAD: 1A T$MYNETREAD=1,2000 ==> 通过这条指令从接收缓冲区中把数据读取出来;$MYNETREAD: 1,60 ==> 实际数据是60个字节;NeowayM590NeowayM590NeowayM590NeowayM590NeowayM590NeowayM590OKA T$MYNETCLOSE=1 ==> 关闭连接;$MYNETCLOSE: 1OK 32 服务器模式的指令流程(内部协议栈)A TOKA TI ==>标准指令,也是通用指令!获取厂家信息、模块软件信息;NEOW A YM590 R2REVISION V016OK或者扩展指令NEO6M590 R2V016040314V1.1300913OKA T+CPIN? ==> 检查SIM卡状态;+CPIN: READYOKA T$MYCCID$MYCCID: "89860113851088826921"OKA T+CSQ ==> 查询信号强度+CSQ: 29,0OKA T+CREG? ==> 查询网络注册+CREG: 0,1OK 4A T+CGA TT?+CGA TT:1OK// 如果是返回+CGA TT:0,则建议设置A T+CGA TT=1A T$MYTYPE?$MYTYPE: 03,01,00OKA T$MYNETCON=0,"APN","CMNET" ==> 设置APN;联通是UNINET,移动是CMNETOKA T$MYNETCON=0,"USERPWD","" ==> 设置用户名和密码为空;OKA T$MYNETCON=0,"AUTH",1 ==> 设置认证方式;OKA T$MYIPFIL TER=0,2OK/////如果需要设置IP地址访问范围,请在这里加上指令。
590到590+门控门转换应用说明书
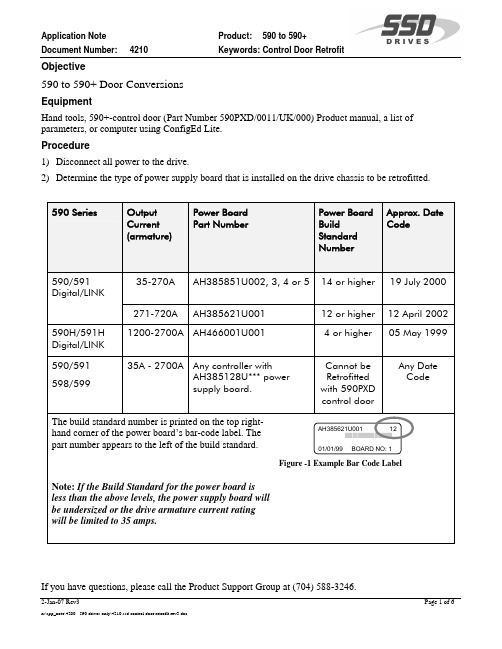
Objective590 to 590+ Door ConversionsEquipmentHand tools, 590+-control door (Part Number 590PXD/0011/UK/000) Product manual, a list of parameters, or computer using ConfigEd Lite.Procedure1)Disconnect all power to the drive.2)Determine the type of power supply board that is installed on the drive chassis to be retrofitted.If you have questions, please call the Product Support Group at (704) 588-3246.If you have questions, please call the Product Support Group at (704) 588-3246.3) Remove the old doora) Loosen the securing screws and open thedoor.Figure -2 Hinge Releaseb) Disconnect the two ribbon cable connections from the door. Also disconnect the door’s earth tag at the converter. c) Release the hinges, as illustrated, and remove the door.4) Fitting the New Doora) Fit the new door by sliding the hinges into the hinge retainers until they click into place.b) If fitting the new door to an existing 590 product, press out the door catch from the new door molding. The door catch may be removed and secured to the door with tape. Use the existing door screw to secure the catch to the top securing position on the converter. From now on, one screw and the door catch will secure the door. Refer to figure 3c)d) e) 590 doors with the added feature of an isolated motor thermal input.5)Configuring the New DoorNote: Firmware in the control board senses the model of converter. When retrofitting anexisting 590 / 590H product it will be necessary to select the correct product code. Depending on the current rating of the chassis it may also be necessary to make some hardware changes.a)Determine the current rating of the chassis being retrofitted.b)Modify the hardware as necessary. See figures 4, 5, 6 and 7 below to assist with themodification.Output Current (armature) Product Code(PCODE)HardwareModificationRequired35-128A DC Retro 4Q 128A DDC Retro 2Q 128A D Move IA cal switch to LO position (left)129-720A DC Retro 4Q 720A DDC Retro 2Q 720A DMove IA cal switch to HI position (right)721-2700A (590 H Chassis) Set PCODE to the ampratings of the chassisfrom the drivenameplate.Examples:DC 4Q 2700 40DDC 2Q 1200 60DMove IA cal switchto HI position. Onthe power boardselect the armaturecurrent for 2000amps and the fieldcurrent for the drivenameplate rating.Figure 4Note: 590H units require the Calibration Switches on the Power Board to be set to specificpositions before use.To access the power board remove the terminal cover, unscrew the two fixings on the right hand side of the control door. Open the door to reveal the power board.If you have questions, please call the Product Support Group at (704) 588-3246.Figure 5If you have questions, please call the Product Support Group at (704) 588-3246.Figure 6If you have questions, please call the Product Support Group at (704) 588-3246.If you have questions, please call the Product Support Group at (704) 588-3246.SW7SW8 - 91 = ON0 = OFF SW10SW1 - 6Armature Current Calibration500A stages (590+H setting = 2000A) Reserved (factory setting = ON) OFF = VA / 100 (for VA up to 875V) (factory setting)ON = VA / 200 (for VA greater than 875V)Field Current CalibrationArmature Voltage CalibrationFigure 76) When the hardware changes have been completed, the product code (PCODE) needs to agree with the hardware settings. This is accomplished by doing a three button reset. a) The three button reset is accomplished by holding the “UP” arrow, the “E” and the “PROG” buttons down while the control power is being applied to the drive. b) The MMI will have all the lights blinking, and the LCD will read “M TO SET PCODE” “E TO SAVE PCODE”. Press the “M” button twice to start programming the PCODE. The MMI should read “PRODUCT CODE” “RETRO 4Q 720A D. The 590H will read differently on the second line, “DC 4Q 2700A 20 D”. Using the arrow buttons to adjust the PCODE to match the current rating for your chassis. The 590H/590+H needs to be set to the exact rating of the armature and field currents. Reference figure 4 for examples of the available PCODEs. c) When you have selected the proper product code for your drive press the “E” button twice to exit this programming mode. The drive will go into a calibrating mode upon exiting. At this point the lights will continue blinking until the calibration is done. The MMI should read “DIGITAL DC DRIVE” and the second line should display the product code that was selected. d) The 590+ has software configurable motor parameters. Program the drive with the correct motor information.。
欧陆590+系列直流驱动器参数说明表

1DIGITAL DC DRIVE ISSUE:×.×2*MENU LEVEL 菜单3**DIAGNOSTICS 诊断4***SPEED DEMAND 速度给定[089]XXX.XX %0.00%只读4***SPEED FEEDBACK 速度反馈[207]XXX.XX %0.00%只读4***SPEED ERROR速度误差[297]XXX.XX %0.00%只读4***SPD LOOP OUTPUT 速度环输出[356]XXX.XX %0.00%只读4***CURRENT DEMAND 电流给定[299]XXX.XX %0.00%只读4***CURRENT FEEDBACK 电流反馈[298]XXX.XX %0.00%只读4***CURRENT FBK. AMPS 电流反馈安培[538]XXXX.X AMPS 0.0AMPS 安培只读4***IaFbk UNFILTERED 电流反馈未滤波[065]XXX.X %(h)只读4***IaDmd UNFILTERED 电流给定未滤波[066]XXX.X %(h)只读4***POS. I CLAMP 正电流箝位[087]XXX.X %(h)0.0%只读4***NEG. I CLAMP负电流箝位[088]XXX.X %(h)0.0%只读4***ACTUAL POS I LIM 有效正电流限幅[067]XXX.X %(h)0.0%只读4***ACTUAL NEG I LIM 有效负电流限幅[061]XXX.X %(h)0.0%只读4***INVERSE TIME O/P 反向时间输出[203]XXX.XX %200.00%只读4***DRIVE START 驱动器启动[082]0:OFF; 1:ON OFF 只读0~70:STOP 停止1:STOP 停止2:RUN 运行7:CRAWL 爬行只读STOP ***OPERATING MODE只读只读只读只读读/写只读只读只读菜单层标记号出厂设置设定范围6:INCH/JOG 2 渐进/点动24运转模式 (点动/缓慢)[212][084]3:TAKE-UP SLACK 1 拉紧放松14:TAKE-UP SLACK 2 拉紧放松25:INCH/JOG 1 渐进/点动14***DRIVE ENABLE 驱动器使能中文解释操作面板英文显示[042][077][079][112][113][080]***AT STANDSTILL 0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止处于静止堵转跳闸斜坡程序停机4***AT CURRENT LIMIT 处于电流极限处于零速***AT ZERO SPEED 40:FALS 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真0:0K 正确1:FAILED 失败0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真OK 正确FALSE 虚TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真***RAMPING ***PROGRAM STOP 4444***STALL TRIP 欧陆590+参数说明表——按MMI 菜单顺序只读4***AT ZERO SETPOINT 处于零设定值[078]4***FIELD DEMAND 励磁给定[183]XXX.XX %0.00%只读4***FIELD I FBK.励磁电流反馈[300]XXX.XX %0.00%只读4***FIELD I FBK. AMPA 励磁电流反馈安培[539]XXXX.X AMPS 0.0 AMPS 安培只读4***RAW FIELD FBK.原始励磁电流反馈[181]XXX.XX %0.00%只读4***FLD. FIRING ANGLE 励磁触发角[184]XXX.XX DEG 0 DEG 度只读4***ANIN 1 (A2)模拟输入1 (A2)[050]XXX.XX 0.00 VOLTS 伏只读4***ANIN 2 (A3)模拟输入2 (A3)[051]XXX.XX 0.00 VOLTS 伏只读4***ANIN 3 (A4)模拟输入3 (A4)[052]XXX.XX 0.00 VOLTS 伏只读4***ANIN 4 (A5)模拟输入4 (A5)[053]XXX.XX 0.00 VOLTS 伏只读4***ANIN 5 (A6)模拟输入5 (A6)[054]XXX.XX 0.00 VOLTS 伏只读4***ANOUT 1 (A7)模拟输出1 (A7)[055]XXX.XX 0.00 VOLTS 伏只读4***ANOUT 2 (A8)模拟输出2 (A8)[056]XXX.XX 0.00 VOLTS 伏只读4***START (C3)起动 (C3)[068]0:OFF; 1:ON OFF 只读4***DIGITAL INPUT C4数字输入 (C4)[069]0:OFF; 1:ON OFF 只读4***DIGITAL INPUT C5数字输入 (C5)[070]0:OFF; 1:ON OFF 只读4***DIGIN 1 (C6)数字输入1 (C6)[071]0:OFF; 1:ON OFF 只读4***DIGIN 2 (C7)数字输入2 (C7)[072]0:OFF; 1:ON OFF 只读4***DIGIN 3 (C8)数字输入3 (C8)[073]0:OFF; 1:ON OFF 只读4***DIGOUT (B5)数字输出 (B5)[074]0:OFF; 1:ON ON 只读4***DIGOUT (B6)数字输出 (B6)[075]0:OFF; 1:ON ON 只读4***DIGOUT (B7)数字输出 (B7)[076]0:OFF; 1:ON OFF 只读4***RAISE/LOWER O/P 上升/下降输出[264]XXX.XX %0.00%只读4***PID OUPUT PID 输出[417]XXX.XX %0.00%只读4***PID ERRORPID 误差[415]XXX.XX %0.00%只读4***SPT SUM OUTPUT 设定值合计1输出[086]XXX.XX %0.00%只读4***RAMP OUTPUT 斜 坡输出[085]XXX.XX %0.00%只读4***SPEED SETPOINT 速度设定值[063]XXX.XX %0.00%只读4***TERMINAL VOLTS 端电压[057]XXX.X %(h)0.0%只读4***BACK EMF反电动势[060]XXX.X %(h)0.0%只读4***TACH INPUT (B2)测速输入 (B2)[308]XXX.XX %0.0%只读4***RAW TACH INPUT 原始测速输入[058]XXX.X %(h)只读4***ENCODER编码器[206]XXXXX RPM 0 RPM 转/分钟只读4***RAW ENCODER RPM 原始编码器每分钟转数[059]XXX.XX RPM 只读4***RAW SPEED FBK 原始速度反馈[062]XXX.XX %只读4***RAW SPEED ERROR 原始速度误差[064]XXX.XX %只读4***CONTACTOR CLOSED 接触器闭合 (未分配)[083]0:OFF; 1:ON 只读只读只读只读只读只读只读0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真[374][376]FALSE 虚TRUE 真0:FALSE 虚;1:TRUE 真FALSE 虚4***FIELD ENABLED 励磁使能44***HEALTH LED ***PID CLAMPED ***DRIVE RUNNING 驱动器运行 (未分配)44DISABLED 禁止0:DISABLED 禁止;1:ENABLED 使能[122]正常指示灯PID箝位[416][169]4***READY准备[125]***SYSTEM RESET系统复位 (未分配)3**SETUP PARAMETERS 建立参数4***RAMPS斜坡5****RAMP ACCEL TIME 斜坡加速时间[002]0.1~600.0 SECS 0.1 SECS 秒读写5****RAMP DECEL TIME 斜坡减速时间[003]0.1~600.0 SECS 0.1 SECS 秒读写5****RAMP HOLD 斜坡保持[118]0:OFF; 1:ON OFF 读写5****RANP INPUT 斜坡输入[005]-105.00~105.00%0.00%读写5****%S-RAMPS 斜坡百分数[266]0.00~100.00% 2.50%读写5****RAMPING THRESH.斜坡阈值[286]0.00~100.00%0.50%读写5****RESET VALUE 复位值[422]-300.00~300.00%0.00%读写5****MIN SPEED 最小速度[126]0.00~100.00%0.00%读写4***AUX O/P 辅助输入/输出5****AUX START 辅助启动[161]0:OFF ;1:0N ON 读写5****AUX JOG 辅助点动[227]0:OFF ;1:0N ON 读写5****AUX ENABLE 辅助使能[168]0:OFF ;1:0N ON 读写5****AUX DIGOUT 1辅助数字输出 1[094]0:OFF ;1:0N OFF 读写5****AUX DIGOUT 2辅助数字输出 2[095]0:OFF ;1:0N OFF 读写5****AUX DIGOUT 3辅助数字输出 3[096]0:OFF ;1:0N OFF 读写5****ANOUT 1模拟输出 1[128]-100.00~100.00%0.00%读写5****ANOUT 2模拟输出 2[129]-100.00~100.00%0.00%读写5****JOG/SLACK 点动/放松[496]0:OFF ;1:0N OFF 读写5****ENABLE使能[497]0:OFF ;1:0N OFF 读写0×0000~0×FFFF0×00000×0000~0×FFFF[288]读写读写读写读写读写读写加速常数(恒加速)0:DISABLED 禁止;1:ENABLED 使能[004]ENABLED 使能5****CONSTANT ACCEL 5****EXTERNAL RESET 外部复位5****AUTO RESET 自动复位5****REM.SEQ.ENABLE 远程序列使能[535][287]0(1sb): 0×0001远程使能1:0×0002 远程启动2:0×0004 远程点动ENABLED 使能0:FALSE 虚;1:TRUE 实FALSE 虚DISABLED 禁止0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能8:0×0100 远程报警(报警确认)9:0×0200 远程跳闸 (远程/远程跳闸)10:0×0400 保留3:0×0008 远程点动模式(选择点动速度)4:0×0010 保留5:0×0020 保留6:0×0040 保留15:0×8000 保留5****REM.SEQUENCE远程顺序[536]11:0×0800 保留12:0×1000 保留13:0×2000 保留14:0×4000 保留7:0×0080 保留0(1sb): 0×0001惯性停机(惯性停机命令)[537]序列状态****SEQ.STATUS 54***OP-STATION 操作面板5****SET UP 设置6*****SETPOINT设定值[512]0.00~100.00%0.00%读写6*****JOG SETPOINT点动设定值[513]0.00~100.00% 5.00%读写5****START UP VALUES 启动值6*****INITIAL SETPOINT 初始设定值[519]0.00~100.00%0.00%读写5****LOCAL RAMP现场斜坡6*****RAMP ACCEL TIME 斜坡加速时间[514]0.1~600.0 SECS 10.0 SECS 秒读写6*****RAMP DECEL TIME 斜坡减速时间[515]0.1~600.0 SECS10.0 SECS 秒读写4***JOG/SLACK 点动/放松5****JOG SPEED 1点动速度 1[218]-100.00~100.00% 5.00%读写5****JOG SPEED 2点动速度 2[219]-100.00~100.00%-5.00%读写5****TAKE UP 1叠加 1 (拉紧1)[253]-100.00~100.00% 5.00%读写5****TAKE UP 2叠加 2 (拉紧2)[254]-100.00~100.00%-5.00%读写5****CRAWL SPEED 爬行速度[225]-100.00~100.00%10.00%读写5****RAMP RATE 斜坡速率[355]0.1~600.0 SECS1.0 SECS 秒读写4***RAISE/LOWER 上升/下降5****RESET VALUE 复位值[255]-300.00~300.00%0.00%读写5****INCREASE RATE 增加速率[256]0.1~600.0 SECS 10.0 SECS 秒读写5****DECREASE RATE 降低速率[257]0.1~600.0 SECS 10.0 SECS 秒读写5****RAISE INPUT上升输入6*****LOCAL KEY ENABLE[261]0:FALSE 虚;读写读写读写读写FALSE 虚FALSE 虚读写读写读写0:FALSE 虚;1:TRUE 真5.00%0.00~100.00%0:FALSE 虚;1:TRUE 真TRUE 真TRUE 真[516]初始正转方向[520]6*****INITIAL FWD DIRECTION6*****INITIAL JOG SETPOINT 656*****INITIAL LOCAL 初始现场(本控)****MODE 方式0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真*****INITIAL PROGRAM [517]初始编程初始点动设定值现场键启用[511][518][228]1:0×0002 程序停机(程序(快速)停机命令2:0×0004 禁止(禁止/使能命令)3:0×0008 运行(调速器启动命令)4:0×0010 点动(调速器点动命令)5:0×0020 保留(未定义)6:0×0040 报警(未确认的报警)7:0×0080 保留(未定义)8:0×0100 正在运行(接触器合,准备使能)9:0×0200 使能 (调速器使能)10:0×0400 零速(零速输出,标记号17)11:0×0800 正常输出(正常输出,标记号1212:0×1000 准备(准备输出,标记号559)13:0×2000 保留14:0×4000 保留15:0×8000 保留5****MIN VALUE 最小值[258]-300.00~300.00%-100.00%读写5****MAX VALUE最大值[259]-300.00~300.00%100.00%读写4***SPECIAL BLOCKS 专用模块5****DIAMETER CALC.直径计算6*****LINE SPEED 线速度[424]-105.00~105.00%0.00%读写6*****REEL SPEED 卷筒速度[437]-105.00~105.00%0.00%读写6*****MIN DIAMETER 最小直径[425]0.00~100.00%10.00%读写6*****MIN SPEED 最小速度[426]0.00~100.00% 5.00%读写6*****RESET VAIUE 复位值[462]0.00~100.00%10.00%读写6*****RAMP RATE 斜坡率[453]0.1~600.0 SECS 5.0 SECS 秒读写6*****DIAMETER直径[427]0.00~100.00%0.00%只读6*****MOD OF LINE SPD 线速度的模值[428]0.00~105.00%0.00%只读6*****MOD OF REEL SPD 卷筒速度的模值[429]0.00~105.00%0.00%只读6*****UNFILT DIAMETER 未滤波直径[430]0.00~100.00%0.00%只读5****TAPER CALC.锥度计算6*****TAPER锥度[438]-100.00~100.00%0.00%读写6*****TENSION SPT.张力设定值[439]0.00~100.00%0.00%读写6*****TAPERED DEMAND 锥度要求[452]0.00~100.00%0.00%只读6*****TENTION TRIM 张力修正[440]-100.00~100.00%0.00%读写6*****TOT.TENS.DEMAND 总张力给定[441]-100.00~100.00%0.00%只读5****TORQUE CALC.转矩计算6*****TORQUE DEMAND 转矩要求[432]-200.00~200.00%0.00%读写5****SETPOINT SUM 2设定值合计 26*****INPUT 2输入 2[445]-300.00~300.00%0.00%读写6*****INPUT 1输入 1[443]-300.00~300.00%0.00%读写6*****INPUT 0输入 0[444]-300.00~300.00%0.00%读写6*****RATIO 1比率 1[446]-3.0000~3.0000 1.0000读写6*****RATIO 0比率 0[447]-3.0000~3.0000 1.0000读写6*****DIVIDER 1除数 1[466]-3.0000~3.0000 1.0000读写6*****DIVIDER 0除数 0[448]-3.0000~3.0000 1.0000读写6*****LIMIT极限[449]0.00~200.00%100.00%读写6*****SPT SUM OUTPUT 设定值合计输出[451]-200.00~200.00%0.00%只读6*****STPT SUM 2 OUT 0设定值合计 2 输出 0[491]-200.00~200.00%0.00%只读6*****STPT SUM 2 OUT 1设定值合计 2 输出 1[492]-200.00~200.00%0.00%只读5****PID比例-微分-积分6*****PROP.GAIN比例增益[404]0.0~100.0 1.0读写6*****INT. TIME CONST.积分时间常数[402]0.01~100.00SECS 5.00 SECS 秒读写6*****DERIVATIVE TC微分时间常数[401]0.000~10.000SECS 0.000 SECS 秒读写50:FALSE 虚;1:TRUE 真FALSE 虚5****LOWER INPUT 下降输入[262]0:FALSE 虚;1:TRUE 真FALSE 虚****EXTERNAL RESET 外部复位[307]读写1:TRUE 真读写读写EN ABLED 使能DISABLED 禁止读写读写6*****OVER WIND 过卷[434]外部复位*****EXTERNAL RESET 0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能6*****TENSION ENABLE 张力使能[463]6[433]EN ABLED 使能6*****POSITIVE LIMIT 正极限[405]0.00~105.00%100.00%读写6*****NEGATIVE LIMIT 负极限[406]-105.00~0.00%-100.00%读写6*****O/P SCALER(TRIM)输出换算(修正)[407]-3.0000~3.00000.2000读写6*****INPUT 1输入 1[410]-300.00~300.00%0.00%读写6*****INPUT 2输入 2[411]-300.00~300.00%0.00%读写6*****RATRO 1比率 1[412]-3.0000~3.0000 1.0000读写6*****RATRO 2比率 2[413]-3.0000~3.0000 1.0000读写6*****DIVIDER 1除数 1[418]-3.0000~3.0000 1.0000读写6*****DIVIDER 2除数 2[414]-3.0000~3.0000 1.0000读写读写读写6*****INT. DEFEAT 积分失效[409]0:OFF; 1:ON OFF 读写6*****FILTER T.C.滤波器时间常数[403]0.000~10.000SECS 0.100 SECS 秒读写模式[473]0~406*****MIN PROFILE GAIN 最小曲线增益[474]0.00~100.00%20.00%读写6*****PROFILED GAIN 曲线增益(随直径改变后的增益)[475]0.0~100.00.0只读5****TENS+COMP CALC.张力+补偿计算6*****STATIC COMP 静态补偿[487]-300.00~300.00%0.00%读写6*****DYNAMIC COMP 动态补偿[488]-300.00~300.00%0.00%读写6*****FIX.INERTIA COMP 固定惯性补偿[479]-300.00~300.00%0.00%读写6*****VAR.INERTIA COMP 变化惯性补偿[480]-300.00~300.00%0.00%读写6*****ROLL WIDTH/MASS 滚角宽度/质量[481]0.00~100.00%100.00%读写6*****LINE SPEED SPT 线速度设定值[498]-105.00~105.00%0.00%读写6*****FILTER T.C.滤波器时间常数[482]0~2000010读写6*****RATE CAL比率校准[483]-100.00~100.0010.00读写6*****NORMALISED dv/dt 标准(正常化) dv/dt [484]-300.00~300.00%0.00%读写6*****INERTIA COMP O/P 惯性补偿输出[485]XXX.XX %0.00%只读6*****TENSION SCALER 张力换算(器)[486]-3.0000~3.00001.0000读写4***FIELD CONTROL 励磁控制5****FID VOLTAGE VARS 励磁电压变量6*****FLD.VOLTS RATIO 励磁电压(输入/输出)比率[210]0.0~100.0%(h)90.0%读写5****FLD.CURRENT VARS 励磁电流变量6*****SETPOINT 设定值[171]0.00~100.00%100.00%读写6*****PROP. GAIN 比例增益[173]0.00~100.000.10读写6*****INT. GAIN积分增益[172]0.00~100.001.28读写6*****FLD. WEAK VARS 励磁削弱变量0:VOLTAGECONTROL 电压控制1:CURRENTCONTROL 电流控制读写读写读写读写MODE=4时,随直径改变后的增益=A*(直径-最小直径)^4+BMODE=0时,随直径改变后的增益=常数=PMODE=1时,随直径改变后的增益=A*(直径-最小直径)+B CURRENT CONTROL 电流控制0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能[408][489]0:DISABLED 禁止;1:ENABLED 使能6*****REWIND重卷6*****MODEMODE=2时,随直径改变后的增益=A*(直径-最小直径)^2+B MODE=3时,随直径改变后的增益=A*(直径-最小直径)^3+B 5使能5****FLD. CTRL MODE励磁控制方式6[170][209]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能ENABLED 使能****FIELD ENABLE 励磁使能*****ENABLE7******EMF LEAD 电动势超前[175]0.10~50.00 2.00读写7******EMF LAG 电动势滞后[176]0.00~200.0040.00读写7******EMF GAIN电动势增益[177]0.00~100.000.30读写7******MIN FLD. CURRENT 最小励磁电流[179]0.00~100.00%10.00%读写7******MAX VOLTS最大电压[178]0.00~100.00%100.00%读写7******BEMF FBK LEAD 反电动势反馈超前[191]10~5000(ms)100读写7******BEMF FBK LAG 反电动势反馈滞后[192]10~5000(ms)100读写5****FLD.QUENCH DELAY 励磁断开延时[185]0.0~600.0 SECS 0.0 SECS 秒读写4***CURRENT PROFILE 电流剖面(电流曲线)5****SPD BRK 1 (LOWER)速度中断点1 (低)[032]0.00~100.00%100.0%读写5****SPD BRK 2 (HIGH)速度中断点2 (高)[031]0.00~100.00%100.0%读写5****I MAX BRK 1 (SPD1)电流最大断点1 (速度1)[093]0.00~200.00%(h)200.0%读写5****I MAX BRK 2 (SPD2)电流最大断点2 (速度2)[033]0.00~200.00%(h)200.0%读写4***INVERSE TIME 反向时间5****AIMING POINT 目标点[204]0.00~200.00%110.00%读写5****DELAY 延时[199]0.0~600.0 SECS 10.0 SECS 秒读写5****RATE速率(比率)[200]0.0~600.0 SECS 60.0 SECS 秒读写4***STOP RATES 停机率5****STOP TIME 停机时间[027]0.0~600.0 SECS 10.0 SECS 秒读写5****STOP LIMIT停机极限[217]0.0~600.0 SECS 60.0 SECS 秒读写5****CONTACTOR DELAY 接触器延时[302]0.0~600.0 SECS 1.0 SECS 秒读写5****PROG STOP TIME 程序停机时间[026]0.0~600.0 SECS 0.1 SECS 秒读写5****PROG STOP LIMIT 程序停机极限[216]0.0~600.0 SECS 60.0 SECS 秒读写5****PROG STOP I LIM 程序停机电流极限[091]0.00~200.00%100.00%读写5****STOP ZERO SPEED 停机零速[029]0.00~100.00%2.00%读写4***CALIBRATION校准5****NOM MOTOR VOLTS 标称(额定)电机电压[521]100~875V 100VOLTS 伏特读写5****ARMATURE CURRENT 电枢电流[523] 2.0~15.0AMPS 2.0AMPS 安培读写5****FIELD CURRENT 励磁电流[524]0.2~4.0AMPS 0.2AMPS 安培读写5****ARMATURE V CAL.电枢电压校准[020]0.9800~1.1000 1.0000读写5****IR COMPENSATION I×R 补偿[021]0.00~100.00%0.00%读写5****ENCODER RPM 编码器每分钟转数[022]0~6000RPM 1000 RPM 转/分读写5****ENCODER LINES 编码器线数[024]10~50001000读写5****ANALOG TACH CAL 模拟测速校准[023]0.9800~1.1000 1.0000读写5****ZERO SPD. OFFSET 零速偏置[010]-5.00~5.00%0.00%读写5****SPDFBK ALM LEVEL 速度反馈报警电平[180]0.0~100.0%(h)50.0%读写5****STALL THRESHOLD 堵转阈值[263]0.00~200.00%95.00%读写5****STALL TRIP DELAY 堵转跳闸延时[224]0.1~600.0 SECS 10.0 SECS 读写5****REM TRIP DELAY 远程跳闸延时[541]0.1~600.0 SECS 10.0SECS 秒读写5****OVER SPEED LEVEL过速电平[188]0.00~200.00%125.00%读写读写读写读写读写励磁断开方式[186]组态使能(组态有效)[039]5****FID.QUENCH MODE 5****CONFIGURE ENABLE 5[174]****ARMATURE I (A9)电枢电流(A9)0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止0:QUENCH 断开;1:STANDBY 备用7******FLD.WEAK ENABLE 励磁削弱使能QUENCH 断开[025]0:UNIPOLAR 单极;1:BIPOLAR 双极BIPOLAR 双极0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止5****FIELD I CAL.励磁电流校准[182]0.9800~1.1000 1.0000读写4***INHIBIT ALARMS 禁止报警5****REM TRIP DELAY 远程跳闸延时[541]0.1~600.0 SECS 10.0SECS 秒读写4***CURRENT LOOP电流环5****CUR.LIMIT/SCALER 电流极限/换算(定标)器[015]0.00~200.00%100.00%读写5****MAIN CURR. LIMIT 主电流极限[421]0.00~200.00%200.00%读写5****PROP.GAIN 比例增益[016]0.00~200.0045.00读写5****INT.GAIN 积分增益[017]0.00~200.00 3.50读写5****AUTOTUNE自动调谐[018]0:OFF; 1:ON OFF读写5****FEED FORWARD 前馈[136]0.10~50.00 2.00读写5****DISCONTINUOUS 不连续(断续点)[137]0.00~200.00%12.00%读写5****ADDITIONAL DEM 附加给定[030]-200.00~200.00%0.00%读写5****POS.I CLAMP 正电流箝位[301]-100.00~100.00%0.00%读写5****NEG.I CLAMP 负电流箝位[048]-100.00~100.00%0.00%读写4***SPEED LOOP 速度环5****SPD.PROP.GAIN速度比例增益[014]0.00~200.0010.00读写5****SPD.INT.TIME CONST 速度积分时间常数[013]0.001~30.000SECS 0.500 SECS 秒读写5****INT.DEFEAT 积分失效[202]0:OFF; 1:ONOFF 读写0~3读写读写读写读写读写读写读写读写读写读写读写读写ENABLED 使能读写读写0:INHIBITED 禁止:1:ENABLED 使能INHIBITED 禁止0:FALSE 虚;1:TRUE 真TRUE 真ENABLED 使能ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极2:ENCODER 编码器4Q(REGEN)再生速度反馈报警[081]ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能励磁故障[019]5555****TRIP RESET [305][028]****5073 RCV ERROR5073接收错误[111]跳闸复位****SPED FBK SELECT速度反馈选择****FIELD FAIL ****STALL TRIP(INHIBIT) 堵转跳闸DISABLED 禁止5****SPEED FBK ALARM 5****ENCODER ALARM 编码器报警[092]5****REM TRIP INHIBIT 远程跳闸禁止[540]50:DISABLED 禁止;1:ENABLED 使能ENABLED 使能5****BIPOLAR CLAMPS 双极箝位[090]电流给定隔离0:0FF =master(主);1:ON =slave(从属)OFF(主)5****REGEN MODE再生方式[201]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能0: 2Q(NON-REGEN)非再生; 1:4Q(REGEN)再生[119]主桥臂[527]5****ENCODER SIGN 编码器符号(极性)[049]****MASTER BRIDGE 5****I DMD.ISOLATE 0:ARM VOLTS FBK 电枢电压反馈[047]51:ANALOG TACH FBK 模拟测速反馈ARM VOLTS FBK 电枢电压反馈5****SPD.FBK.FILTER 速度反馈滤波器[547]0.000~1.000读写5****ADVANCED 先进功能(高级)6*****ADAPTION 自适应[268]0~30禁止7******SPD BRK1(LOW)速度断点1 (低)[269]0.00~100.00% 1.00%读写7******SPD BRK2(HIGE)速度断点2 (高)[270]0.00~100.00%5.00%读写7******PROP.GAIN 比例增益[271]0.00~200.00 5.00读写7******SPD.INT.TIME 速度积分时间[272]0.001~30.0000.500 SECS 秒读写6*****I GAIN IN RAMP 斜坡电流增益[274]0.0000~2.0000 1.0000读写6*****POS.LOOP P GAIN 位置环比例增益[273]-200.00~200.00%0.00%读写6*****ZERO SPD.QUENCH 零速断开7******ZERO SPD.LEVEL 零速电平[284]0.00~200.00%0.50%读写7******ZERO IAD LEVEL 零负载电流(IAD)电平[285]0.00~200.00%1.50%读写5****SETPOINTS 设定值6*****SETPOINT 1设定点 1[289]-105.00~105.00%0.00%读写6*****RATIO 2 (A3)比率 2 (A3)[007]-3.0000~3.0000 1.0000读写6*****SETPOINT 2 (A3)设定点 2 (A3)[290]-105.00~105.00%0.00%只读6*****SETPOINT 3设定点 3[291]-105.00~105.00%0.00%读写6*****SETPOINT 4设定点 4[041]-105.00~105.00%0.00%读写6*****MAX DEMAND 最大给定[357]0.00~105.00%105.00%读写6*****MIN DEMAND 最小给定[358]-105.00~0.00%-105.00%读写4***STANDSTILL静止5****ZERO THRESHOLD 零阈值[012]0.00~100.00%2.00%读写5****SOURCE TAG 源标记[306]0~49989读写4***SETPOINT SUM 1设定值合计 15****RATIO 1比率 1[006]-3.0000~3.00001.0000读写5****RATIO 0比率 0[208]-3.0000~3.00001.0000读写5****DIVIER 1除数 1[419]-3.0000~3.0000 1.0000读写5****DIVIER 0除数 0[420]-3.0000~3.00001.0000读写5****DEADBAD WIDTH 死区宽度[131]0.0~100.0%0.0%读写5****LIMIT 极限[375]0.00~200.00%105.00%读写5****INPUT 2输入 2[423]-200.00~200.00%0.00%读写5****INPUT 1输入 1[100]-200.00~200.00%0.00%读写5****INPUT 0输入 0[309]-200.00~200.00%0.00%读写读写读写读写读写读写[008]5****SIGN 15****SIGN 0符号 0[292]符号 1静止逻辑5****STANDSTILL LOGIC [011][009]0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极6*****SING 2 (A3)0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止3:ENCODER/ANALOG 编码/模拟组合反馈7******MODE 方式1:SPD FBK DEPENDENT 与速度反馈有关2:SPD ERROR DEPENDENT 与速度误差有关3:CUR.DEMAND DEPENDENT 与电流给定有关0:DISABLED 禁止;0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极符号 2 (A3) (极性)3**PASSWORD 口令4***ENTER PASSWORD 输入口令[120]0×0000~0×FFFF 0×0000读写4***CHANGE PASSWORD 改变口令[121]0×0000~0×FFFF0×0000读写3**ALARM STATUS 报警状态最后报警[528]0×0000: 无现行报警0×0001: 超速0×0002: 丢失脉冲0×0004: 励磁电流0×0008: 散热器过热跳闸0×0010: 电机热敏电阻0×0020: 过压(VA)0×0040: 速度反馈0×0080: 编码器故障0×0100:励磁故障0×0200: 三相故障0×0400: 锁相环4***HEALTH WORD 正常字[115]0×00000×8218只读4***HEALTH STORE正常存储[116]0×00000×0000只读4***THERMISTOR STATE 热敏电阻状态 (未分配)[337]只读4***SPEED FBK STATE 速度反馈状态 (未分配)[472]只读3**MENUA 菜单4***MENU DELAY 菜单延时[038]0~6553531读写4***LANGUAGE 语言5****ENGLISH英语3**PARAMETER SAVE 参数储存3**SERIAL LINKS 串行连接4***MAIN PORT (P1)主通讯口 (P1)5****GROUP ID (GID)集群号(GID)[138]0读写5****UNIT ID (UID)单元号(UID)[139]0读写ASC ⅡBINARY 二进制OPTION 任选5****PROTOCOL(通讯)协议[148]EI ASC Ⅱ读写只读只读读写读写读写只读4***LAST ALARM4远程跳闸0×f006:PCB 版本0×ff06:产品代码0×f001:自动调谐失灵(中止)[526]4***BY-PASS PASSWORD 0:FALSE 虚;1:TRUE 真忽略口令 保留4***FULL MENUS 4***STALL TRIP 全菜单5****SRL LINK ENABLE 0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能串行连接使能(启动)[146]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能***REMOTE TRIPFALSE 虚0×0000[542]堵转跳闸[112]0:0K 正确1:FAILED 失败OK 正确0:FALSE 虚;1:TRUE 真0×ff05:远程跳闸0×f200: 配置使能0×f400: 无操作面板0×0800: 5703接收错误0×1000: 堵转跳闸0×2000: 过电流跳闸0×f005: 外部跳闸0×8000: 交流互感器故障0×f001:自动调谐失误[037]300; 600; 1200; 24004800; 9600(缺省);192005****ESP SUP. (ASCⅡ)ESP支持(ASC Ⅱ)[152]DISABLED 读写5****CHANGEBAND (BIN)改变带(BIN)[144]0.00~327.67%0.00%读写5****ERROR REPORT 出错报告[158]0×0000~0×FFFF 0×00C0读写5****PNO. 7参数号7[142]0×0000~0×FFFF0×FFFF 读写5****OPTION ADDRESS 任选地址[499]0~327670读写5****OPTION VERSION 任选版本[303]0.00~99.990.00只读5****PARITY奇偶校验[334]ODD 奇/EVEN 偶EVEN 偶读写4***AUX PORT (P2)辅助通讯口(P2)5****SRL LINK ENABLE 串行连接使能(启动)[147]ENABLED读写5****GROUP ID (GID)集群号(GID)[140]0读写5****UNIT ID (UID)单元号(UID)[141]0读写5****PROTOCOL (通讯)协议[149]EI ASC Ⅱ读写5****BAUD RATE波特率[151]9600读写5****ESP SUP. (ASCⅡ)ESP支持(ASC Ⅱ)[153]DISABLED 读写5****CHANGEBAND (BIN)改变带(BIN)[145]0.00%读写5****ERROR REPORT 出错报告[159]0×00C0读写5****PNO. 7参数号7[143]0×FFFF 读写4***TEC OPTION技术任选项0: NONE1: RS4852: PROFIBUS DP 3: LINK 4: DEVICE NET 5: CAN OPEN 6: LON WORKS 7: TYPE 75****TEC OPTION IN 1技术任选输入 1[501]-32768~327680读写5****TEC OPTION IN 2技术任选输入 2[502]-32768~327680读写5****TEC OPTION IN 3技术任选输入 3[503]-32768~327680读写5****TEC OPTION IN 4技术任选输入 4[504]-32768~327680读写5****TEC OPTION IN 5技术任选输入 5[505]-32768~327680读写5****TEC OPTION FAULT 技术任选故障[506]NONE 只读5****TEC OPTION VER 技术任选版本[507]0×0000~0×FFFF 0×0000只读5****TEC OPTION OUT 1技术任选输出 1[508]0只读5****TEC OPTION OUT 2技术任选输出 2[509]只读4***SYSTEM PORT (P3)系统通讯口(P3)5****P3 SETUP P3设置0~30:DISABLED 禁止;1:5703MASTER 主机2:5703SLAVE 从机3:CELite(EIASC Ⅱ)6*****5703 SUPPORT 5703支持7******SETPT.RATIO 设定值比率[132]-3.0000~3.00000.0000读写DISABLED 禁止读写6*****MODE方式[130][150]9600读写5****TEC OPTION TYPE技术任选类型[500]NONE读写****BAUD RATE 5波特率7******5703 INPUT 5703输入[187]-300.00~300.00%0.00%只读******5703 OUTPUT5703输出[189]-300.00~300.00%0.00%只读******SCALED 5703 DATA 转换后5703数据[189]0.00%只读6*****BISYNCE SUPPORT 双同步支持7******GROUP ID (GID)集群号(GID)[329]0×0000~0×00070读写7******UNIT ID (UID)单元号(UID)[330]0×0000~0×000F0读写7******ESP SUP.(ASCⅡ) ESP支持(ASC Ⅱ)[328]DISABLED 禁止读写7******CHANGEBAND (BIN)改变带(BIN)[331]0.00%读写7******ERROR REPORT 出错报告[332]0×0000~0×FFFF0×00C0读写7******PNO. 7参数号7[333]0×0000~0×FFFF0×FFFF 读写6*****P3 BAUD RATE P3波特率[198]300~576009600读写5****DUMP MMI -> P3将MMI 信息传送给上位机5****DUP XFER <- P3从上位机传送数据给驱动器5****DUP XFER -> P3驱动器向上位机传送数据5****DUMP MMI (TX)将MMI信息传送给上位机6*****UP TO ACTION 直到作用5****DUP XFER (RX)从上位机传送数据给驱动器6*****UP TO ACTION 直到作用5****DUP XFER (TX)驱动器向上位机传送数据6*****UP TO ACTION直到作用54***PNO CONFIG 参数号配置5****PNO 112参数号 112[312]0~549354 (0)读写5****PNO 113参数号 113[313]0~54922 (0)读写5****PNO 114参数号 114[314]0~549209 (0)读写5****PNO 115参数号 115[315]0~54918 (0)读写5****PNO 116参数号 116[316]0~549170 (0)读写5****PNO 117参数号 117[317]0~54919 (0)读写5****PNO 118参数号 118[318]0~549174 (0)读写5****PNO 119参数号 119[319]0~54947 (0)读写5****PNO 120参数号 120[320]0~549304 (379)读写5****PNO 121参数号 121[321]0~54932 (380)读写5****PNO 122参数号 122[322]0~54933 (381)读写5****PNO 123参数号 123[323]0~54931 (382)读写5****PNO 124参数号 124[324]0~54924 (383)读写5****PNO 125参数号 125[325]0~54949 (384)读写5****PNO 126参数号 126[326]0~549201 (385)读写5****PNO 127参数号 127[327]0~549210 (0)读写3**SYSTEM系统4***SOFTWARE软件5****ENGLISH Nov 11 194***CONFIGURE I/O 配置输入/输出读写读写[039]0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止5****CONFIGURE ENABLE组态(配置)使能7******SETPT.SIGN 设定值符号****Serial Link Version Number 串行连接版本号 (未分配)0:NEGATIVE 负极;1:POSITIVE 正极[155]0×0000~0×FFFFPOSITIVE 正极[133]75****ANALOG INPUTS 模拟输入6*****ANIN 1 (A2)模拟输入 1 (A2)7******CALIBRTION 校准[230]-3.0000~3.0000 1.0000读写7******MAX VALUE 最大值[231]-300.00~300.00%100.00%读写7******MIN VALUE最小值[232]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[246]0~549100读写6*****ANIN 2 (A3)模拟输入 2 (A3)7******CALIBRTION 校准[233]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[234]-300.00~300.00%100.00%读写7******MIN VALUE 最小值[235]-300.00~300.00%-100.00%读写7******OUTPUT输出[493]XXXX.X %只读6*****ANIN 3 (A4)模拟输入 3 (A4)7******CALIBRTION 校准[236]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[237]-300.00~300.00%100.00%读写7******MIN VALUE最小值[238]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[249]0~5495读写6*****ANIN 4 (A5)模拟输入 4 (A5)7******CALIBRTION 校准[239]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[240]-300.00~300.00%100.00%读写7******MIN VALUE最小值[241]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[250]0~54948读写6*****ANIN 5 (A6)模拟输入 5 (A6)7******CALIBRTION 校准[242]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[243]-300.00~300.00%100.00%读写7******MIN VALUE最小值[244]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[247]0~549301读写5****ANALOG OUTPUTS 模拟输出6*****ANOUT 1 (A7)模拟输出 1 (A7)7******% TO GET 10V 获得10V 的百分数[245]-300.00~300.00%100.00%读写7******OFFSET偏置[464]-100.00~100.00%0.00%读写7******SOURCE TAG 源标记[251]0~54962读写6*****ANOUT 2 (A8)模拟输出 2 (A8)7******% TO GET 10V 获得10V 的百分数[248]-300.00~300.00%100.00%读写7******OFFSET偏置[465]-100.00~100.00%0.00%读写7******SOURCE TAG 源标记[252]0~54963读写5****DIGITAL INPUT数字输入6*****DIGITAL INPUT C4数字输入 C47******DESTINATION TAG 目的标记[494]0~549496读写6*****DIGITAL INPUT C5数字输入 C57******DESTINATION TAG 目的标记[495]0~549497读写6*****DIGIIN 1 (C6)数字输入 1 (C6)7******VALUE FOR TRUE “真”值[103]-300.00~300.00%0.01%读写7******VALUE FOR FALSE“虚”值[104]-300.00~300.00%0.00%读写读写读写7******MODULUS 模件0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真FALSE 虚[362][363]7******MODULUS 模件6*****DIGIIN 2 (C7)数字输入 2 (C7)7******VALUE FOR TRUE “真”值[106]-300.00~300.00%0.01%读写7******VALUE FOR FALSE “虚”值[107]-300.00~300.00%0.00%读写7******DESTINATION TAG 目的标记[105]0~549118读写6*****DIGIIN 3 (C8)数字输入 3 (C8)7******VALUE FOR TRUE “真”值[109]-300.00~300.00%0.01%读写7******VALUE FOR FALSE “虚”值[110]-300.00~300.00%0.00%读写7******DESTINATION TAG 目的标记[108]0~549119读写5****DIGITAL OUTPUT 数字输出6*****DIGOUT 1 (B5)数字输出 1 (B5)7******THRESHOLD (>)阈值(>)[195]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[097]0~54977读写6*****DIGOUT 2 (B6)数字输出 2 (B6)7******THRESHOLD (>)阈值(>)[196]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[098]0~549122读写6*****DIGOUT 3 (B7)数字输出 3 (B7)7******THRESHOLD (>)阈值(>)[197]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[099]0~549125读写6*****CONFIGURE 57035703配置(组态)7******SOURCE TAG源标记[134]0~54989读写7******DESTINATION TAG 目的标记[135]0~54941读写5****BLOCK DIAGRAM 方框图(组态)6*****RAISE/LOWER DEST 上升/下降目的(号)[260]0~5490读写6*****RAMP O/P DEST 斜坡输出目的(号)[293]0~549291读写6*****SPT SUM 1 DEST 设定值合计1目的(号)[294]0~549289读写6*****PID O/P DEST PID 输出目的(号)[400]0~5490读写6*****DIAMETER 直径[431]0~5490读写6*****TAPER锥度[422]0~5490读写6*****SETPOINT SUM 2设定值合计2[450]0~5490读写6*****POS. I CLAMP 正电流箝位[435]0~5490读写6*****NEG. I CLAMP 负电流箝位[436]0~5490读写6*****TENS+COMP CALC.张力+补偿计算[478]0~549读写5****INTERNAL LINKS 内部连接6*****LINK 1连接 17******SOURCE TAG源标记[364]0~549读写读写读写读写读写读写读写非FALSE 虚0:FALSE 虚;1:TRUE 真[361]******MODULUS 7******INVERTED 模件[045]0:FALSE 虚;1:TRUE 真TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真0:FALSE 虚;1:TRUE 真FALSE 虚非[360]0:FALSE 虚;1:TRUE 真FALSE 虚7******MODULUS 模件[044]7******INVERTED 非[359]0:FALSE 虚;1:TRUE 真TRUE 真7******MODULUS 模件[043]7******INVERTED 76*****LINK 2连接 27******SOURCE TAG源标记[366]0~5490读写7******DESTINATION TAG 目的标记[367]0~5490读写6*****LINK 3连接 37******SOURCE TAG源标记[368]0~5490读写7******DESTINATION TAG 目的标记[369]0~5490读写6*****LINK 4连接 47******SOURCE TAG源标记[370]0~5490读写7******DESTINATION TAG 目的标记[371]0~5490读写6*****LINK 5连接 57******SOURCE TAG源标记[454]0~5490读写7******DESTINATION TAG 目的标记[455]0~5490读写6*****LINK 6连接 67******SOURCE TAG源标记[456]0~5490读写7******DESTINATION TAG 目的标记[457]0~5490读写6*****LINK 7连接 77******SOURCE TAG源标记[458]0~5490读写7******DESTINATION TAG 目的标记[459]0~5490读写6*****LINK 8连接 87******SOURCE TAG源标记[460]0~5490读写7******DESTINATION TAG 目的标记[461]0~5490读写6*****LINK 9连接 97******SOURCE TAG源标记[467]0~5490读写7******DESTINATION TAG 目的标记[468]0~5490读写6*****LINK 10连接 107******SOURCE TAG源标记[469]0~5490读写7******DESTINATION TAG 目的标记[470]0~5490读写6*****LINK 11连接 117******SOURCE TAG源标记[390]0~5490读写7******DESTINATION TAG 目的标记[391]0~5490读写7******ADVANCED 高级(先进)[392]0:OFF; 1:ONOFF 读写0~60:SWITCH 转换1:INVERTER 非2:AND 与3:OR 或5:MODULUS 模值7******AUX. SOURCE 辅助源[394]0~5490读写6*****LINK 12连接 127******SOURCE TAG源标记[395]0~5490读写7******DESTINATION TAG 目的标记[396]0~5490读写7******ADVANCED 高级(先进)[397]0:OFF; 1:ON OFF 读写0~60:SWITCH 转换1:INVERTER 非2:AND 与3:OR 或读写读写SWITCH7******MODE 方式[398]6:COMPARATOR 比较器******MODE 方式[393]4:SIGN CHANGER 符号改变SWITCH7。
Marlin固件配置

Marlin 固件配置So,让我们开始吧。
首先在Arduino IDE中打开Configuration.h,注意做好源文件的备份工作波特率 - 20行#define BAUDRATE 250000//#define BAUDRATE 115200该行是用来决定主控板使用何种波特率来与电脑上的控制软件进行通信的。
通常是用250K和115.2K两种波特率选择,要选择何种波特率,只要将该行前面的”//” 删除,不选择何种波特率只需要在该行前添加“//” (注意:不包括“”)。
默认设置250K在Printrun/Pronterface 和RepSnapper 里面运行都不错。
(我用lubuntu + Pronterface 250K 连接不上的,115.2K 倒没有问题)。
主控板– 49行#ifndef MOTHERBOARD#define MOTHERBOARD 33#endif你可以在注释里可以看到Marlin固件支持的主控板清单,通过修改#define MOTHERBOARD 这行的数字,选择对应的主板编号即可。
上面这行是选择RAMPS 1.3 的意思,你可以按自己实际情况修改该项。
Marlin 固件会根据主板信息定义主控板引脚布局。
具体各种主控板的引脚布局可以在pin.h中看到。
Marlin 固件温控设置现在我来看看温控方面的设置,温控设置有点复杂,但是我们不需要考虑那些复杂的PID计算设置问题。
基本上我们需要做的是选择3D打印机机温度传感器的类型,如果不是你自己安装的温度传感器,你可以在RepRap wiki中了解温度传感器的类型。
热电调节器(热敏电阻)– 78 行#define TEMP_SENSOR_0 1#define TEMP_SENSOR_1 0#define TEMP_SENSOR_2 0#define TEMP_SENSOR_BED 1如果你仔细阅读Marlin固件的配置文件,你会发现支持的固件所支持的温控传感器的类型对应的编号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AT+SIGNAL=3:正常状态是闪烁,链接上GPRS后常亮。 AT+SIGNAL=4:正常状态是常灭,链接上 GPRS 后常亮。 对应的模块软件版本是 V1.30c 或者 V1.20u
生效年月 200808 200906 200907
200908 201006
201012
201101
备注:1.30 开头的版本是带服务器功能的版本; 1.20 开头的版本是不带服务器功能的版本。
修订版本,增加切换命令的说明 修订版本,修改 PDU 短信流程,增加发送数据的说明 修订版本,增加 AT+XBANDSEL 指令说明 修订版本,增加身份认证指令注意事项!
201104 201105 201107 201109
修订版本, 1)增加身份认证的用户名长度,原来是 20,修改成 32,对应的软件版 本是 1.30e 2)增加“SOCKETS: IPR STOPPED”的说明 3)增加模块流程注意事项 修订版本, 1) 增加短信设置说明 2) 增加外部协议栈的 AT 流程说明
201203 201204源自深圳市有方科技有限公司版权所有
第 1页,共 65页
有无线,方精彩
目录
1 普通指令.................................................................................................................................................................... 5
2.1 模块状态查询:+CPAS................................................................................................................................... 10 2.2 网络注册状态查询:+CREG...........................................................................................................................10 2.3 关机指令:+CPWROFF...................................................................................................................................11 2.4 设置模块功能:+CFUN...................................................................................................................................11 2.5 低功耗设置:+ENPWRSAVE.................................................................................................................................12 2.6 时钟:+CCLK.................................................................................................................................................. 13 2.7 设置模块波特率:+IPR................................................................................................................................... 13 2.8 输入 PIN 码:+CPIN........................................................................................................................................14 2.9 PIN 使能与查询功能指令:+CLCK................................................................................................................ 15 2.10 PIN 修改密码指令:+CPWD......................................................................................................................... 16 2.11 奇偶校验:+ICF............................................................................................................................................. 16 2.12 复用模式:+CMUX....................................................................................................................................... 17 2.13 扩展错误报告:+CEER................................................................................................................................. 18 2.14 设置错误提示信息:+CMEE........................................................................................................................ 19
有无线,方精彩
M590 AT 指令集
V3.1
深圳市有方科技有限公司
有无线,方精彩
版权声明
Copyright © 2008 neoway tech 深圳市有方科技有限公司保留所有权利。
是深圳市有方科技有限公司所有商标。 本手册中出现的其他商标,由商标所有者所有。
说明
本应用指南对应产品为 M590/M590E/M590J。 本应用指南的使用对象为系统工程师,开发工程师及测试工程师。
由于产品版本升级或其它原因,本手册内容会在不预先通知的情况下进行必要的更新。 除非另有约定,本手册中的所有陈述、信息和建议不构成任何明示或暗示的担保。
深圳市有方科技有限公司为客户提供全方位的技术支持,任何垂询请直接联系您的客户经理或发送邮件 至以下邮箱:
Sales@ Support@ 公司网址:
1.1 获取产品序列号:+CGSN.................................................................................................................................5 1.2 获取国际移动用户识别码:+CIMI.................................................................................................................. 5 1.3 获取 SIM 卡标识:+CCID.................................................................................................................................6 1.4 获取产品版本号:+GETVERS................................................................................................................................6 1.5 重复执行上一条指令:A/................................................................................................................................. 6 1.6 查询模块型号:+CGMM...................................................................................................................................7 1.7 查询模块信息:I................................................................................................................................................ 7 1.8 回显设置:E.......................................................................................................................................................8 1.9 显示当前配置:&V........................................................................................................................................... 8 1.10 存储当前配置:&W.........................................................................................................................................9