无速度传感器矢量控制系统转子电阻在线辨识
基于最小二乘法的永磁同步电机在线参数辨识的仿真研究

基于最小二乘法的永磁同步电机在线参数辨识的仿真研究摘要:较高性能的永磁同步电机矢量控制系统需要实时更新电机参数,文章中采用一种在线辨识永磁同步电机参数的方法。
这种基于最小二乘法参数辨识方法是在转子同步旋转坐标系下进行的,通过MA TLAB/SIMULINK对基于最小二乘法的永磁同步电机参数辨识进行了仿真,仿真结果表明这种电机参数辨识方法能够实时、准确地更新电机控制参数。
关键词:永磁同步电机;参数辨识;最小二乘法[b][align=center]Simulation of PMSM based on least squares on-line parameter identificationWANG Hong-shan , ZHANG Xing,XIE Zhen , Y ANG Shu-ying[/align][/b]Abstract:This paper presents a method to determine the parameters of PMSM on line which are necessary to implement the vector control strategy. The presented identification technique, based least-squares, reveals itself suitable to be applied to PMSM. The estimation is based on a standard model of PMSM, expressed in rotor coordinates. The method is suitable for online operation to continuously update the parameter values. The developed algorithm is simulated in MATLAB/SIMULINK. Simulation results are presented, and accurate parameters for PMSM is provided.KEY WORDS:PMSM; Parameter Identification; Least-Squares0 引言电机参数辨识方面的文献数量颇多,研究成果丰富。
无速度传感器矢量控制系统转速辨识方法研究

无速 度 传感 器 矢量控 制 系统模 型 , 动 态速 度 估计 器 、 型参 考 自适应 、 对 模 滑模 观 测 器等 几 种 速 度辨 识 方
法进 行 了仿 真 、 较 和 分 析 . 比 关 键 词 : 矢 量 控 制 ; 速 度 传 感 器 ; 速 辨 识 无 转
中图分 类号 :TM9 1 2
电机 在对 称运 行 的条 件 下 ,定 子 和转 子 的磁 场 为 圆形 旋转 磁 场并 以 同步 角 速 度 进 行 旋 转 ,转 子 以 硼 旋转 , 以转 差 硼 割 旋 转 磁 场 ,产 生 电 磁 切
转 矩 . 过 磁 通 观 测 器 , 以 观 测 到 转 子 磁 通 , 转 通 可 由
林 国汉 ,李 晓 秀
( 南工程学 院 电气信息学院 , 潭 410) 湖 湘 1 11
摘 要 :转 速辨 识是 无速 度 传感 器 矢量控 制 系统 的 关键 问题 之 一. 绍 了当前 研 究 的具 有 代 表性 的异 介 步 电动 机 无速度 传 感 器 矢量 控 制 系统速 度 辨 识 方 法 , 用 MAT AB S MUL NK 建 立 了异 步 电动 机 利 L /I I
( D )6、 b- 乘 法[ 利用 电机磁 化 电流无 功 功 S E [ 最/ - ] 、
率 实 现转 速 辨 识_ 、 阶 闭环 状 态 观测 器 法 、 I自 8全 ] P
适 应 调节 器法 等. 这类 方 法对 电机 模 型 进 行 了理 想
化 的假设 , 依赖 于 电机 的理想 数 学模 型. 第二类 方 法
即:
叫 一 硼1 叫 一 () 1
电压信 号来 估算 电机 的速度 , 如直 接计 算 法 ( 又可 分 为 基 于电压 模 型 的转 速 辨 识 、 于 电流 模 型 的 转 速 基
转子电阻的在线辨识及其补偿

在矢量控制系统 中,电机 的转 子电阻对系统 的控制性 能影
以下的分析都是在按转子磁链定 向的矢 量控制系统 中得到 的, 且未考虑定子电流的变化 。 () 1转子 电阻变化对磁链观测模型的影 响及其补偿。按转子
响最大 。主要是 因为转子 电阻值 的变化范围在系统 的运行 过程 中可达到百分之百 ,从 而使得矢 量控制系统 中的磁链观测值 容
)
不考 虑转子电阻值变化的时候 , 的观测幅值 与转子 磁链 电阻值 的关 系如式 () 2所示 :
然而 , 链观测模型依赖于 电机 的内部参数 , 磁 特别是转子 电阻对
其影 响最大 。下面将介绍转 子电阻的变化对矢量控制系统 的影
响及 相应 的补偿方案 。
) ) × s 奇
r 2
() 2
因此 ,转 子电阻值 变化后与转子 电阻值变化之前 的磁链 观
测 幅值关系如式( ) : 3所示
( ) — s× ~
舳 ) 一
图 1 环矢量控制系统结构图 1 转子电阻变化对 系统 的影响及其补偿 . 2
~ ≠
垃 sl +
观测模 型中, 磁链观测信号从两方面来体现 : 磁链观测 幅值 和
磁链观测相位 。 本文将 着重讨论转子 电阻变化对磁链观测幅值
信号 的影响 , 而得 到其对转矩环节反馈量 的影响。 进
系统 基础上 , 出转子电阻变化对系统造成 的影响 , 分析 并构造 出
转子 电阻 的神经元 网络辨识模型 。提 出利用神经元 网络结合 B P
文提 出在磁链幅值 的观测 回路 中加一个传递 函数为 1 () / s的环 A
节 ,以此来抵消 由转子 电阻值变化带来的对磁链观 测幅值的影
(技术文档2)异步电机目前几种主要控制方法的对比分析

异步电机几种主要控制方法的对比分析近些年来,随着电力电子、计算机控制以及矢量控制等技术的不断发展,交流调速获得了巨大的技术支持,交流调速系统已经取代了直流调速系统。
交流异步电机调速控制系统大致可分为两大类,一类是标量控制系统,主要是变频调速系统,包括恒压频比控制(V/F 控制)和转差频率控制。
另一类是矢量控制系统,包括转子磁场定向矢量控制(VC )、转差频率矢量控制、直接转矩控制(DTC )和无速度传感器矢量控制。
1 标量控制1.1 恒压频比控制( V/F)交流异步电机调速时,总是希望保持每极磁通量m Φ为额定值不变,这样铁芯才能工作在最经济状态。
电源频率和电机极对数决定异步电动机的同步转速,即在改变电源频率时,可以改变电机的同步转速,这时只有控制电源电压与变化的频率的比值为恒定( V/F 恒定) ,才能确保电动机的磁通m Φ基本恒定。
电动机定子的感应电动势:m N111K 44.4Φ=N f E g (1)式中Eg —气隙磁通在定子每相绕组中感应电动势有效值;1f —电源频率; 1N —定子每相绕组串联匝数; 1N K —基波绕组系数; m Φ—每极气隙磁通量。
由式(1)可知,在控制电动机频率时,保持1/f E g 1恒定,就可以维持磁通恒定。
有三种不同方式的电压—频率协调控制。
(1) 恒压频比=11/f U 控制,1U 为定子端电压,这种方式最容易实现,能够满足一般调速要求,其缺点是低速带载能力差,需要对定子压降进行补偿。
(2) 恒1/f E g 控制,g E 是气隙磁通在定子每相绕组中感应电动势,它以对恒压频比实行电压补偿为目标,稳态调速性能优于恒压频比11/f U 控制。
这种控制方式的缺点是机械特性非线性,产生转矩的能力不强。
(3) 恒1/f E r 控制,r E 是气隙磁通在转子每相绕组中感应电动势,这种控制方式可以得到和直流励电动机一样的机械特性,从而使高性能调速得以实现。
但是它的控制系统比较复杂。
无位置传感器永磁同步电动机矢量控制系统综述

1基 于基波励磁和反 电动势的估测方法
这 些 方法 主 要 是基 于 电 动机 的电流 电压模 型 , 通过基 本 的电磁关 系或 反 电动势来 估测 转子 位置及
转速 , 动态性能较好 , 最低转 速可达到每分钟几 十 转, 低于此转速范围时由于电信号受噪声干扰 , 定子 电阻 随温升 变化 , 电流 反馈 环 节 的直 流 补偿 及 漂 移 等原因, 估测精度会大大下降。 11 . 基于永磁同步电动机电磁关系的估算方法 永磁 同步电动机的电流、 电压信号 中包含有 电 动机的转速及转子位置信息 , 我们可以通过检测电
模型参考 自 适应方法 中使用弱磁控制技术和解耦控 制技术改善 了控制系统低速段和高速段 的估计 精 争 并 舸¨ 厂 L — 划
度, 扩大 了 电动机 的调速 范 围。 13扩展 卡尔 曼滤波 器 .
型 扩展卡尔曼滤波器( K ) E F 是线性系统状态估计 圈
●
基于永磁同步电动机电磁关系的估算方法仅依 赖于电动机的基波方程 , 计算简单 , 易于工程实现, 但 这些 方法 大多工 作 在 开 环模 式 下 , 电机 受 到 噪 在 声干扰 , 由于温升 、 磁饱和效应等导致的电动机参数
为参考模 型 , 以电流模 型为 可调模 型 , 据 Ppv 根 oo 超
际值非常接近 , 由估算值构成的闭环系统在宽调速
范 围 内具 有 良好 的特性 。但扩展 卡尔 曼滤 波器 的算
法复杂 , 需要高阶矩阵求逆运算 , 计算量相当大。而
且这 种方 法是建 立在 对系 统误差 和测 量噪 声 的统 计
C N u n - u , ENG M i WE i n - o g HE G a g h i Z n, IL a g h n
无速度传感器感应电机矢量控制仿真.
拖动系统课程设计报告书题目:无速度传感器感应电机矢量控制系统设计与仿真专业:姓名:学号:指导教师:课程设计任务书矢量变换控制(Transvector Control),也称磁场定向控制。
它是由德国学者F.Blaschke等人在1971年提出的一种新的优越的感应电机控制方式,是基于dq轴理论而产生的,它的基本思路是把电机的电流分解为d轴电流和q轴电流,其中d轴电流是励磁电流,q轴电流是力矩电流,这样就可以把交流电机的励磁电流和力矩电流分开控制,使得交流电机具有和直流电机相似的控制特性,是为交流电机设计的一种理想的控制理论,大大提高了交流电机的控制特性。
一般将含有矢量变换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上并按转子磁场准确定向的控制,电动机才能获得最优的动态性能。
本文介绍了矢量控制系统的原理及模型的建立,搭建了带转矩内环的转速、磁链闭环矢量控制无速度传感器调速系统的Simulink模型,并用MATLAB最终得到了仿真结果。
关键词:感应电机; 矢量控制; 磁链观测; 速度估算摘要 (iv)目录 (v)1 异步电机及Simulink模型 (1)1.1 异步电动机的稳态等效电路 (1)1.1.1 等效电路中各参数物理意义 (1)1.1.2 感应电机功率流程 (1)1.2 Simulink仿真基础 (2)1.2.1 异步电动机Simulink模型 (2)1.2.2 异步电动机模型参数设置 (3)1.3 电机测试信号分配器模块及参数设置 (4)2 矢量控制 (5)2.1 矢量控制的基本思路 (5)2.2 矢量坐标变换原理 (7)α-坐标系间的变换) (7)2.2.1 定子绕组轴系的相变换(A-B-C和β2.2.2 转子绕组轴系的变换(A-B-C和d-q坐标系间的变换) (8)3 电流正弦PWM技术 (8)4 转子磁链模型的建立 (9)4.1 基于电压电流模型设计转子磁链观测器 (9)4.2 基于转差频率设计的转子磁链观测器 (10)5 转矩计算模块 (11)6 转速推算器的设计 (11)6.1 基于转矩电流误差推算速度的方法 (11)6.2 基于模型参考自适应方法(MARS)的速度估算 (12)ϕ的速度估算方法 (13)6.3 基于空间位置角s7 感应电机矢量控制系统的Simulink仿真 (13)8 结论 (19)参考文献 (19)αβ的感应电机数学模型 (20)附录1 基于0附录2 基于dq0的感应电机数学模型 (21)附录3 基于dq0的转子磁链定向感应电机数学模型 (22)1 异步电机及Simulink 模型 感应电动机是借定子旋转磁场在转子导体中感应电流,从而产生电磁转矩的一种电机。
定转子电阻在线辨识的感应电机转速估计方法
保证转速 估计 的精 确度 ; 同时, 识的转 子 电阻应 用于 矢量控制 系统 , 保 系统 获得 良好 的稳 态和 辨 确
动态性能。仿真及 实验结果表明, 与未进行电阻在线辨识的转速估计方法相比, 该方法具有较高的 转速 估计精 确度 , 对参数 变化的 鲁棒 性 强 , 并适 用于无速度 传感 器 矢量控 制 系统 。 关键 词 :感应 电机 ; 线辨识 ; 型参考 自 应 ;矢量控 制 系统 ;无速 度传 感器 在 模 适
dnie t o n t s t c s uigrt pe smao , p a n ec a ̄ gs tr n t eti s tr dr o r ia e r o sedet t n u dt gt h n n a dr o fs a a o re sn d n o r i i i h to a o r
rssa c s o oo p e si to y tm a s d b t rtmp r t r ier a .i o e s r h c u- e itn e fr trs e d e tmain s se c u e y moo e e au e rs e 1tme t n u et e a c ・ - r c oo p e si t n;me n ie,t e i n i e oo e itn e wa p le o v co o to a y o r tr s e d e t f ma i o a wh l h de tf d r tr r ssa c s a p id t e tr c n r l i
第1 4卷
第 4期
电 机 与 控 制 学 报
无速度传感器矢量控制
无速度传感器矢量控制技术的行业现状与展望The Comprehensive Status Analysis and Future DevelopmentTendency of Sensor-less Vector Control (SVC) Technology1 引言交流传动在高性能场合的应用始于矢量控制概念的引入,包括直接磁场定向与间接磁场定向控制。
尽管这一概念早在60年代就已出现,并由Siemens 的Blaschke博士于1972年正式提出,但是真正应用还是在微电子技术发展的二十年后。
矢量控制从基本原理上讲能够获得优异的动静态特性,但是对电机参数的敏感性却成为实际应用中必须解决的问题。
驱动器通过启动前的自整定以及运行过程中的在线整定,适应电机参数变化,保持矢量控制的动静态性能,这些复杂的自适应控制算法都必须通过强大的信号处理器才能完成。
近年来随着半导体技术的发展及数字控制的普及,矢量控制的应用已经从高性能领域扩展至通用驱动及专用驱动场合,乃至家用电器。
交流驱动器已在工业机器人、自动化出版设备、加工工具、传输设备、电梯、压缩机、轧钢、风机泵类、电动汽车、起重设备及其它领域中得到广泛应用。
随着半导体技术的飞速发展,功率器件在不断优化,开关速度在提高而损耗在下降,功率模块的功率密度在不断增加;数字信号处理器的处理能力愈加强大,处理速度不断提升,交流驱动器完全有能力处理复杂的任务,实现复杂的观测、控制算法,现代交流传动的性能也因此达到前所未有的高度。
以代表交流驱动控制最高水平的交流伺服为例,其需求随着新的生产技术与新型加工原料的出现而迅速增长。
据相关统计,高性能交流伺服驱动器数量的年增长率超过12%。
伺服驱动中应用最多的电机是异步电机及同步电机,额定功率从50W到200kW,位置环、速度环以及转矩环路的典型带宽分别为60Hz、200Hz 以及1000Hz。
交流电机驱动中的大部分问题应当说在当今的驱动器中已经得到解决,相关的成熟技术提供了被业界广泛接受的解决方案,并在许多领域中得到成功应用,因此从基本结构上来讲,交流驱动器的现有设计方案在未来的几年中不会有大的变化。
无速度传感器矢量控制系统转速辨识的复合算法

4 07 0 0 4)
要 :针对 电机开环速度估计 和磁 化电流无 功功率模型参考 自适应法的优缺点 , 出了一种将二者结 提
合起来 的转速辨识复合算法 。该方法提高 了转速辨识 的动态性能和稳态辨识精度 , 并解决 了磁化 电流无功功
率模 型在转速过零点的失控问题 。通 过仿 真及 试验证明 了该方法的正确性。 关键词 : 电机转速辨识 ; 无速度传 感器 ; 直接辨识算 法; 模型参考 自适应 ; 复合算 法
p v d h g l . Smu t n o sy h rb e ,w e trv n c o st e z r o n fs e d i w l b u fc n rl o r e ih y i l e u l ,t e p o lm a h n moo l sa r s h e o p i t p e t l e o t o to , l o i o i et d F n l ,c mp tr s lt n d e p r n a e u t v r y i ai i . ss t e . i al l y o u e i a i s a x ei mu o n me t lrs l e i t v d t s f s l y
的端 电压 和 电流来辨 识 电机转 速 。但该 方法存 在 纯积分环节 , 降低了辨识的准确性 ; 利用 电机磁化 电 流无 功 功率 为 比较 状态 量 , 可消 除积分 环节 , 并 不 受定 子 电阻变 化 的影 响 , 在 转 速低 时估 计 不 但
电压 、 电流信号得到电机的转速进行闭环控制 , 就
0 引 言
在交 流变频 调 速 系 统 中 , 根据 变 频 器 输 出 的
取决于数学模型 的参数是否准 确¨ 。电机 在运 』 行 过程 中 , 由于温度 和磁路 饱 和 的变 化 , 引起 电 会 机参数 的变化 , 因此要求速度辨识 能在线修正系 统结构的有关参数变化 , 于是提出了基于转子磁 链的模型参考 自适应方法 ( R S 』利用测得 M A) ,
【系统仿真学报】_无传感器控制_期刊发文热词逐年推荐_20140723
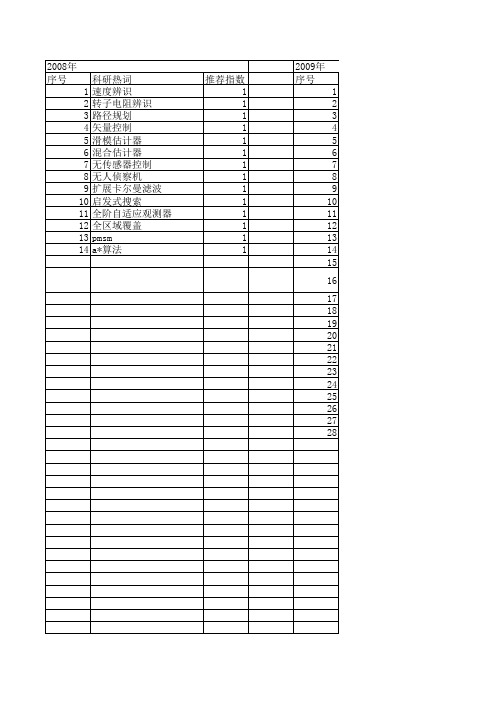
科研热词 速度辨识 转子电阻辨识 路径规划 矢量控制 滑模估计器 混合估计器 无传感器控制 无人侦察机 扩展卡尔曼滤波 启发式搜索 全阶自适应观测器 全区域覆盖 pmsm a*算法
推荐指数 1 1 1 1 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
科研热词 速度辨识 速度磁链模糊观测器 转矩方程 行程规划 移动代理 直接转矩控制 模糊控制 最小生成树 无速度传感器控制 无速度传感器 无线传感器网络 感应电机 仿真
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4
科研热词 硬件在环仿真 状态估计 滑模观测器 无传感器控制
推荐指数 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
2009年 科研热词 推荐指数 无速度传感器 5 直接转矩控制 3 感应电机 2 速度辨识 1 辨识 1 转子电阻辨识 1 自适应观测器 1 神经网络 1 矢量控制 1 直接转矩控制系统 1 直接转矩控制(dtc) 1 灰色系统 1 永磁无轴承同步电机 1 永磁同步电机 1 模型参考自适应 1 模型参考变结构(mars-vs) 1 无速度传感器控制 1 无传感器滑模观测器 1 无传感器控制 1 新型改进低通滤波器 1 改进低通滤波器 1 扩展卡尔曼滤波器 1 定子电阻辨识 1 在线参数辨识 1 全阶自适应观测器 1 低通滤波器 1 人工鱼群算法 1 三电平逆变器 1
2011年 序号 1 2 3 4
科研热词 能量成形 滑模控制 永磁同步电机 无源控制
一种感应电机矢量控制转子电阻在线辨识方案
or f w a r d n e t wo r k wa s a d d e d a s a d e l a y f a c t o r t o me mo iz r e h i s t o r y s t a t e . S o t h i s mo d e l h a s t h e a b i l i t i e s f o a d a p t i n g t o t i me —
F AN B o 1 , 2 L I U Ga n g , S HI Gu a n g — h u i
( 1 . E l e c t r o n i c &I n f o r m a t i o n E n g i n e e r i n g C o l l e g e , H e n a n U n w e m i t y o f S c i e n c e a n d T e c h n o l o g y , L u o y a n g 4 7 1 0 0 3 ,
异步电机无速度传感器矢量控制与参数辨识研究
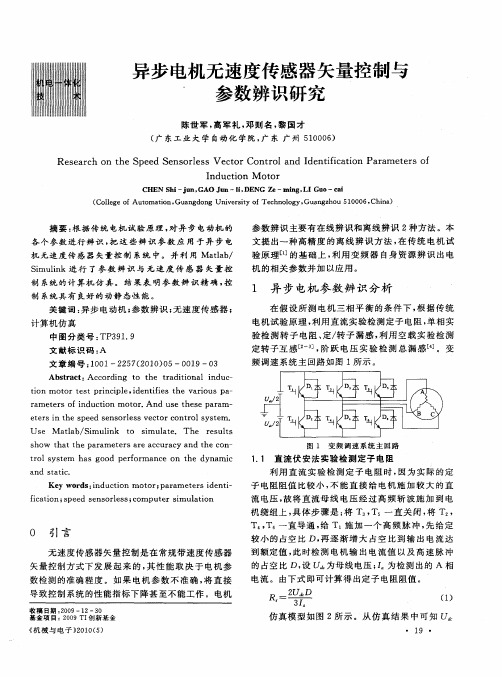
1 异 步 电机 参数 辨 识 分 析
在假 设 所 测 电机 三 相平 衡 的 条 件 下 , 根据 传 统 电机 试验 原 理 , 利用 直 流实验 检测 定子 电 阻 , 相实 单 验检 测 转 子 电 阻 、 转 子 漏感 , 用 空 载 实验 检 测 定/ 利
定转 子互 感 [ , 跃 电 压 实 验 检 测 总漏 感 [ 。变 阶 4 ] 频调 速系 统 主 回路 如 图 1所示 。
流 电压 , 故将 直 流母 线 电压 经 过 高 频 斩 波施 加 到 电
机绕 组上 , 体 步骤 是 : T , 直 关 闭 , T , 具 将 。T 一 将 。
0 引 言
无 速度 传感 器矢 量控 制是 在 常规 带速 度传 感器
矢 量控 制方 式下 发 展起 来 的 , 性 能取 决 于 电机 参 其 数检 测 的准确 程 度 。如果 电机 参 数 不 准 确 , 直 接 将 导致 控 制系统 的 性能指 标 下降 甚至 不 能工作 。电机
1 1 直流 伏 安法 实验 检测定 子 电 阻 .
利 用 直 流 实验 检 测 定 子 电 阻 时 , 为实 际 的 定 因
子 电 阻 阻 值 比较 小 , 能 直 接 给 电 机 施 加 较 大 的 直 不
f a i n; p e e s re s c mp t r smu a i n i to s e d s n o l s ; o c u e i l to
摘要 : 根据 传 பைடு நூலகம் 电机 试验 原 理 , 异 步 电动机 的 对
参 数辨识 主要有 在 线辨 识和 离线 辨识 2种 方法 。本 文 提 出一种 高精 度 的离 线 辨 识 方 法 , 传 统 电机 试 在 验原 理 Ⅲ 的基 础 上 , 用 变 频 器 自身 资源 辨 识 出 电 利
矢量控制异步电动机的转子电阻在线辨识方法

第2 9卷 第 3期
20 0 2年 7月
华
北
电 力 大 学
学 报
V o12 .9. N O. 3 J y,20 ul 02
Jour lofN or h hi e t i w e ni na t C na El c rc Po r U ver iy st
O nlne i ntfc io e ho o ot e i t nc or s p e t r c nt o l d i de ii at n m t d fr orr s s a e f l v c o - o r le i i nduc i ot s ton m or
m e ho i ns nstv o s t e it nc ra i t d si e ii e t t orr s s a a e va i ton. Re ulsof s t
为 了在 矢 量 控 制 中 准 确 辨 识转 子 电 阻值 , 们 人 已经 提 出 了许 多方 法 。 一 方 法 是 利 用 测 量 无 功 功 一种 率和 计 算 无 功 功 率 之 差 来 校 正 转 子 电阻 ,这 种 方 法 的 精 确 度 低 。文 献 【 】中 通 过 向 磁 链 电流 中 注 2
响 电动 机 调 速 系 统 对 电流 转 矩 分 量 的 瞬 时 跟 踪 能
力 ,造 成 电磁 转 矩 的 稳 态 误 差 和 瞬 时 振 荡 。要 实 现
o e x e d d l n l r( K n h tn e ma t E F) i p o o e i p p r t e Ka i f e s r p s d nt s a e. i h
其 中 影 响 最 大 的 是 转 子 电 阻 。 温 度 和 磁 饱 和 程 度 受
基于矢量控制系统的转子电阻鲁棒观测器及其对比研究
詈 (G ∞)A 舅 ( =+ + ∞ c + + 4 )
定义 了一种 L a u o 函数 : ypnv
V e e (一 ) +扈一 。/ : T +C ∞ ( C) P o / O
电阻 的 自适 应 辨识率 。 转 速 的 自适 应辨 识 率 :
() 5
足= 0 R ( e ) R + . 1 0 50 -
异步 电机的数 学模 型 可南 以下状态 方程描 述 :
=
() 1
3 转子 电阻鲁棒观测器 的设计
3 1 鲁棒观测器的推导 .
在 静 止 坐标 系下 , 虑 到转 子 电 阻 的不确 定 性 , 考
通 过 以上的双 辨识 方案 可 以看 出 ,由于存在转 子 电阻 的不确 定 性 , 对转 子 电阻进 行在 线辨识 , 虽然 能
机
车
电
传
动
确估算 是至关 重要的 。 而在 电机 的实际运 行 中, 随着温 升和集肤效应 的影 响 , 转子 电阻值 也会发生变化I , 引 从 而导致转 子电阻含有不确定性 因素 。 由此 可知 , 由于 电 机 的运行过程 中产生 的转 子电阻不确定 性势必会 导致 速度估计存在误 差甚 至会导致系统 的不稳定 。 因而 , 在 无 速度传感 器矢量 控制 系统 中 , 转子 电阻进行 准确 对 估算 或者抑制转 子 电阻的不 确定性 是至关 重要 的。 为 消 除 或者 抑 制 转 子 电阻 不 确 定性 对 系 统 的 影 响 ,目前最 常用 的方法就 是在速 度辨识 过程 中对转 子 电阻进行 在线辨识并 予 以补偿 L 9 即双辨识方 案。 4]  ̄, 例 如文献 [】 4 中提 出了一种基 于 白适 应观测器的转速和转 子 电阻双 辨识方 案 , 采用经 典 的转 子 电流转子 磁链 观 测器模 型 , 将转速 和转子 电阻视 为时变的不确定 参数 ,
MRAS感应电机定子电阻的在线辨识

第11卷 第6期2007年11月电 机 与 控 制 学 报ELECTR IC MACH I N ES AND CONTROLVo l 11No 6Nov .2007MRAS 感应电机定子电阻的在线辨识李健, 程小华(华南理工大学电力学院,广东广州510640)摘 要:针对感应电机定子电阻值受外界因素干扰而影响其矢量控制系统稳定性和控制精确度问题,提出了基于人工神经网络的定子电阻在线辨识方法。
为了辨识定子电阻,将人工神经网络模型的定子电流估算值与实际测量电流值的误差反馈以调整神经网络的权值。
借助MATLAB /SI M U LI NK 搭建仿真系统,验证了定子电阻在线辨识的必要性。
结果表明,该方法可以有效地对定子电阻进行在线辨识。
关键词:人工神经网络;感应电机;定子电阻;在线辨识;无速度传感器中图分类号:TM 301 2文献标识码:A文章编号:1007-449X (2007)06-0620-05Onli ne identificati on based on m odel reference adapti ve system forstator resistance of i nduction mot orLI Jian , CHENG X iao hua(Co llege of E lectric Pow er ,South China U niversity of T echno l ogy ,G uangzhou 510640,Chi na)A bstract :A novel on line i d entificati o n sche m e based on artificia l neural net w or ks fo r stato r resi s tance ofinduction m otor is proposed i n order to solve the a ffect on stab ility and prec ision by stator resistance varia tion in inducti o n m o tor vecto r contro l syste m.For the sta tor resistance i d entificati o n,the error bet w een the m easured stator current and the esti m ated stator curren t based on artifi c ial neura l ne t w ork (ANN )is back propagated to ad j u st the w e i g hts of t h e neura lnet w or k .S i m u lation syste m s are bu iltw ith the help of MATLAB /SI M ULI NK,and the necessity o f stato r resistance i d entification are verifi e d .The resu lts sho w that the stator resistance can be identified onli n e e ffectively w ith the proposed sche m e .K ey words :artific i a l neural net w orks ;induction m o tor ;stator resi s tance ;online i d entificati o n;speed sensorless收稿日期:2007-05-28作者简介:李健(1982-),男,硕士,主要研究方向为电气传动、智能控制;程小华(1963-),男,博士,教授,主要研究电机及其控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAIZ u HE Li a h n, — o g
( olg f Auo t n En n ei g, n g Un vr i f Aeo a tc n C le eo tmai gie rn Na jn iest o rn u isa d o i y
Asr n uis Na jn 1 0 6, in s Ch n ) to a tc , n ig 2 0 1 J a g u, ia )
Ab ta t I h p e e ore s c t o he 3 ph s n sr c :n t e s e d s ns ls on r loft - a e iduc i ot r,hem a h n ar m e e s e pe ily ton m o t c i e p a t r ( s ca l r orr ss a e)ha e as r g ifue eon t e pe f r ot e it nc v ton n l nc h ro man eofve t rc t o nd p e ii n o hes e s i a c c o on r la r cso ft pe d e tm — ton n s e dy s a e,ti nown t a he sm ula ouse tm a i h ot r s e nd r t e it nc si — i .I t a — t t i s k h tt i t ne s i ton oft e r o pe d a o orr ss a e i m
中 图分 类 号 : TM3 1 0 文献标识码 : A
On-i e I e tfc to fRo o ssa c o p e e o ls c o n r lS s e ln d n iia in o t r Re it n e f r S e d S ns re sVe t rCo t o y t m
电 气传 动 2 1 年 第 4 02 2卷 第 8 期
E E T I R VE 2 1 Vo. 2 No 8 L C RCD I 02 14
.
无 速 度传 感 器 矢 量 控制 系统 转 子 电阻在 线 辨识
蔡准 , 何礼 高 ( 南京航 空航 天 大 学 自动化 学 院 , 苏 南京 2 0 1 ) 江 1 0 6
摘 要 : 相 感 应 电动 机 无 速 度 传 感 器 矢 量 控 制 系 统 中 , 三 电机 参 数 变 化 ( 别 是 转 子 电 阻 ) 响矢 量 控 制 性 特 影 能 和 速 度 辨 识 精 度 ; 稳 态 下 , 于 转子 磁 链 是 常数 , 速 和 转 子 电 阻 不 能 解 耦 , 者 很 难 实 现 同 时 辨 识 。基 而 由 转 两 于 无 速 度 传 感 器 直 接 矢 量 控 制 系 统 , 计 了独 立 于 全 阶 状 态 观 测 器 的 积 分 改 进 型转 子 磁 链 观 测 器 , 态 时 结 设 动 合 自适 应 递 推 最 小 二 乘 法 对 转 子 电 阻进 行 辨 识 , 统 能 够 在 动 态 过 程 中 实 现 对 转 速 和 转 子 电 阻 的 同 时 辨 识 , 系 该 方 法 通 过 了仿 真 和 实 验 验 证 。 关 键 词 : 应 电动 机 ; 速 度 传 感 器 ; 量 控 制 ; 子 电 阻在 线 辨 识 ; 推 最 小 二 乘 法 感 无 矢 转 递
i e a ti s i e t si a em ot r s e d a o orr ssa e sm u t n ou l T h a i t ft o sus d, nd i spo sbl O e tm t o p e nd r t e it nc i la e sy. e v ldiy o he pr — p e m e ho s v rfe y sm u i nd e pe i e . os d t d i e iid b i lnk a x rm nt Ke ywor s:n c i n m o or pe d s n ore s; cor c t o ; o or e it c nln s i a in; r c sv d i du to t ;s e e s ls ve t on r l r t r ssan e o ie e tm to e ur ie