API公司激光干涉仪介绍资料
API激光干涉仪直线轴使用校验操作方法

API激光干涉仪直线轴使用校验操作方法前言:由于加工条件的限制,所有滚珠丝杠螺母结构都会存在一些误差,所以当私服电机按照CNC系统指令转动足够的圈数后,反应到直线移动轴上的位置总会出现误差。
另外丝杆安装误差及导轨制造误差也会影响直线移动轴的定位误差及线性误差。
对于传统的手动测量及参数输入的反向间隙偏差与螺距误差补偿,工作量大,繁琐,容易出现计算和操作上的错误。
通过API激光干涉仪对直线轴的自动测量与自动计算,并且自动生成反向间隙偏差及螺距误差补偿表,大大减小了操作与计算上的误差,而且提高了工作的效率。
针对常见数控系统,在加工过程中存在定位精度误差的问题,在下文会对几种常见的CNC系统进行位置精度的校验,并举例说明。
一、API激光干涉仪产品介绍1.1技术综述:API激光干涉仪大致有一下几种:1D激光主要测量定位误差3D激光可以测量定位误差、直线度误差(双向)5D/6D激光可以测量定位误差、直线度误差(双向)、偏摆角、俯仰角和滚动角1.2技术参数3D标准型:1. 线性:0.5ppm .2. 测量范围:45米(1D可选80米)3. 线性分辨力:0.001um.4. 直线度精度:(2.0+0.4/m)um或2%显示较大值5. 直线度最大范围:500um6. 温度精度:0.2摄氏度7.湿度精度:5%8.压力精度:1mmHg1.3 XD Laser激光干涉仪3D标准型(套装)标准型API XD-3D激光干涉仪系统如下表1.1编号描述数量产地及制造商86413 激光头 1 美国API 78413 快速安装夹具 1 美国API 100125 XD电源 1 美国API 76215 电源线,125V,10A,适用于90-250交流电 1 美国API 41631 4”光学连接杆 1 美国API 98231 6”光学连接杆 1 美国API 58464 45mm光线转向镜-带有4”光学连接杆 1 美国API 18386 十字接插件 1 美国API 56211 磁力底座(50X58X55) 2 美国API 55539 以太网连接线 1 美国API19254 水平气泡 1 美国API97512 气象站。
激光干涉仪

激光干涉仪的安装
线性测量的安装
激光头 固定反 射镜 移动反射 镜
线性测量原理
线性测量原理
激光干涉仪通过接受到得激光的明暗条 纹变化,再通过电子细分,从而知道距离的 细微和准确变化。
角度测量的安装
角度测量原理
激光头
直线度测量的安装
直线度测量原理
垂直测量的安装
平面度测量的安装
END
激光干涉仪
关于齿轮的效率 关于齿轮的类型
……
1
激光干涉仪的基本概念
目 录
2
激光及其特点
3
Байду номын сангаас激光的干涉特性
4
激光干涉仪的安装 激光干涉仪的原理
5
激光干涉仪的基本概念
什么是激光干涉仪
利用激光作为长度基准,对数控设备(加工中心,三坐标测量机等)的 位置精度(定位精度,重复定位精度等),几何精度(俯仰扭摆角度, 直线度,垂直度)进行精密测量的精密测量仪器
激光及其特点
激光输出可视为一束正弦波
激光具有三个重要特性
1 2 3
激光波长非常稳定,可以精密测量测量的要求。
激光波长非常短,可以用于高精度测量。(例:雷尼绍xl-80激 光波长为633nm) 激光具有干涉特性。
激光的干涉特性
相长干涉
如果两束光相位相同,光波会叠 加增强,表现为亮条纹。
相消干涉
如果两束光相位相反,光波 会互相抵消,表现为暗条纹。
双频激光干涉仪
光刻机定位双频激光干涉仪发布日期:2005年10月20日访问次数:1503光刻机定位双频激光干涉仪1.项目概述双频激光干涉仪以其特有的同时具有大测量范围、高分辨率、高测量精度和高速度等优点,在精密和超精密测量领域获得了广泛的应用。
双频激光干涉仪采用外差干涉测量原理,克服了普通单频干涉仪测量信号直流漂移的问题,具有信号噪声小、抗环境干扰能力强、允许光源多通道复用等诸多优点,使得干涉测长技术能真正用于实际生产。
例如,精密坐标机床的标定、高精度传感器的标定、半导体工业中的高精度模板的制造和定位、以及构成多坐标精密定位多轴运动系统等。
中科院上海光机所在上海市科委光科技专项二期项目支持下,完成了“光刻机定位双频激光干涉仪”样机。
以100nm线宽步进扫描投影光刻机工件台定位需求为研制目标,对双频激光干涉仪系统的关键技术进行了攻关,已经成功研制出一台高精度、高速度、大范围的双频激光干涉仪实验室样机,如图1所示。
该仪器核心技术是分辨率的提高和改进,取得6项专利,拥有自主知识产权。
2.国内外技术、应用现状及应用领域1)国内外技术双频激光干涉仪首先由美国HP公司研制成功并获得专列权。
第一批定型产品为5500A,于1970年投放市场,它的量程达到61m,测量精度为5×10-7,测量速度达330mm/s。
其后HP公司又研制了其他派生产品,如5526A除了能测长度以外,还能测速度、角度、平面度、直线度和垂直度,还可以用来测震及进行X-Y微动台的定位,用途极为广泛。
其他国家在这方面做了不少工作,投入市场的还有英国的Renishaw、美国的ZYGO、法国SORO和日本横河等公司。
我国从七十年代,清华大学、北京计量院、机械部成都工具研究所等科研部门就已开始研制双频激光干涉仪样机,至今已经有二、三十年历史。
成都工具研究所有商品化仪器出售,但分辨率比较差。
尽管国外双频激光干涉仪水平比较高,但价格高,特别是高档次的产品对我国禁运,而国内产品不能满足高精度先进制造技术方面的需求。
激光干涉仪性能简介

激光干涉仪性能简介激光干涉仪是一种利用激光作为光源,通过干涉效应来测量光路差的精密仪器。
它广泛应用于长度测量、位移测量、表面形貌分析等领域。
本文将介绍激光干涉仪的性能特点和相关应用。
一、测量精度激光干涉仪的测量精度是衡量其性能的重要指标之一。
它通常表示为测量的标准偏差,也称为测量重复性。
激光干涉仪的测量精度受到多个因素的影响,包括激光光源的稳定性、光路稳定性、探测器的分辨率等。
一般来说,激光干涉仪的测量精度可以达到纳米级甚至亚纳米级。
二、线性度激光干涉仪的线性度是指输出信号与输入量之间的线性关系。
在理想情况下,激光干涉仪的输出信号应该与输入量成线性关系。
然而,在实际应用中,激光干涉仪的线性度常常受到非线性因素的影响,如光学元件的非线性特性、电子控制的非线性响应等。
为了提高激光干涉仪的线性度,可以采用校正算法或者提高光学元件的质量。
三、稳定性激光干涉仪的稳定性是指其输出信号在一定时间范围内的变化程度。
稳定性包括长期稳定性和短期稳定性两个方面。
长期稳定性指的是在长时间使用过程中,激光干涉仪的性能变化情况。
短期稳定性指的是在短时间内,激光干涉仪的输出信号的波动情况。
稳定性对于激光干涉仪的应用非常重要,尤其是在需要长时间测量或者对测量结果要求高精度的情况下。
四、灵敏度激光干涉仪的灵敏度是指其对于被测量的参数变化的敏感程度。
一般来说,激光干涉仪的灵敏度越高,能够检测到更小的参数变化。
激光干涉仪的灵敏度与输入光强度、光路长度等因素相关。
提高灵敏度的方法包括增强光源的亮度、采用高分辨率的探测器等。
五、动态范围激光干涉仪的动态范围是指能够测量的最大和最小光强的范围。
这个范围通常用分贝单位来表示。
动态范围越大,表示激光干涉仪能够处理更大和更小的光强。
动态范围的大小与仪器的灵敏度和噪声水平有关。
六、应用领域激光干涉仪广泛应用于工业制造、科学研究和实验室测量等领域。
在工业制造中,激光干涉仪常用于长度测量、表面形貌分析和位移测量等。
激光干涉仪测量原理
激光干涉仪测量原理激光干涉仪是一种基于干涉原理的测量仪器,主要用于测量长度、角度和平面度等。
它通过利用激光的干涉现象,实现高精度测量。
激光干涉仪有多种类型,包括腔长度干涉仪、双光束干涉仪和多光束干涉仪等。
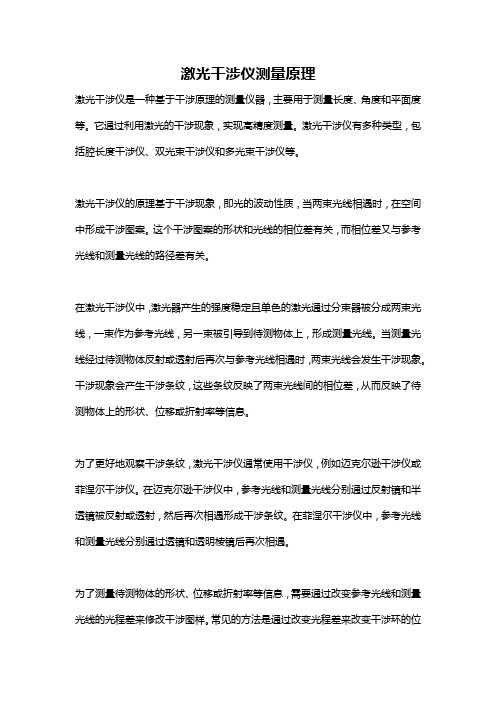
激光干涉仪的原理基于干涉现象,即光的波动性质,当两束光线相遇时,在空间中形成干涉图案。
这个干涉图案的形状和光线的相位差有关,而相位差又与参考光线和测量光线的路径差有关。
在激光干涉仪中,激光器产生的强度稳定且单色的激光通过分束器被分成两束光线,一束作为参考光线,另一束被引导到待测物体上,形成测量光线。
当测量光线经过待测物体反射或透射后再次与参考光线相遇时,两束光线会发生干涉现象。
干涉现象会产生干涉条纹,这些条纹反映了两束光线间的相位差,从而反映了待测物体上的形状、位移或折射率等信息。
为了更好地观察干涉条纹,激光干涉仪通常使用干涉仪,例如迈克尔逊干涉仪或菲涅尔干涉仪。
在迈克尔逊干涉仪中,参考光线和测量光线分别通过反射镜和半透镜被反射或透射,然后再次相遇形成干涉条纹。
在菲涅尔干涉仪中,参考光线和测量光线分别通过透镜和透明棱镜后再次相遇。
为了测量待测物体的形状、位移或折射率等信息,需要通过改变参考光线和测量光线的光程差来修改干涉图样。
常见的方法是通过改变光程差来改变干涉环的位置或数量。
光程差可以通过调整反射镜或透镜的位置来实现。
通过测量干涉条纹的位置和数量的变化,可以获得待测物体的形状或位移的信息。
激光干涉仪具有高精度、高分辨率和快速响应的特点,因此被广泛应用于各种测量领域。
例如,激光干涉仪可用于测量长度、角度和平面度等机械工件的精度。
它还可以用于光学元件的制造和表面形貌的测量。
此外,激光干涉仪还可以应用于光学实验、光学校准和科学研究等领域。
总之,激光干涉仪是一种基于干涉原理的精密测量仪器。
它通过利用激光的干涉现象来实现高精度测量,并广泛应用于各种测量领域。
激光干涉仪在工业界和科学研究领域具有重要的应用价值。
API公司T3激光跟踪仪

一、美国API公司简介美国自动精密工程公司(A utomated P recision I nc.)由刘锦潮博士(Dr. Kam u)创建于1987年。
公司自成立以来始终致力于机械制造领域精密测量仪器和高性能传感器的研制和生产,产品已广泛应用于美国及世界各国的先进制造领域。
在与美国联邦政府、美国国家标准局(NIST)、国家制造科学中心、密歇根大学、马里兰大学、北卡罗莱纳大学、康涅狄格大学等的项目合作中,API公司都是积极参与者和关键技术伙伴。
API公司迄今为止所取得的成就使其在国际精密测量领域享有很高的声誉。
刘锦潮博士于八十年代初率先开展激光跟踪测量技术的研究,持有激光测量系统多项专利,是全世界公认的激光跟踪技术发明者。
API公司不仅推出了国际上第一台商业化激光跟踪仪(即瑞士莱卡激光跟踪仪)。
而且是目前世界上唯一能生产六维激光跟踪仪的厂家。
API研制的绝对测距(ADM)技术早在1996年就在美国宇航(NASA)和美国海军(NAVY)工程中得到了成功应用。
目前,API激光跟踪仪已经被广泛应用到了航空、航天、汽车制造、造船、铁路机车、机床、石油、电子等行业。
美国国家标准局(NIST)、中国国家计量科学研究院、美国宇航局、Boeing、Airbus、洛克希德马丁公司、英国航空公司、法国雪铁龙公司、通用汽车公司、日产、标致、雷诺、雪铁龙等都已成为API公司的忠实用户。
中国国家计量科学研究院(NIM)作为中国计量行业的最高权威单位与API的合作更体现了强强联合的特点。
API激光跟踪仪的客户清单及在航空及船舶行业的使用状况详见附后。
为更好地服务于中国客户,API公司于2004年初在上海成立了上海爱佩仪自动精密仪器科技有限公司,作为中国用户的技术服务中心。
API上海公司的工程技术人员均为本科或硕士学历,并定期在美国总部接受专业的技术培训,上海公司可以提供设备的操作培训、维修保养和设备标定,同时面向中国客户提供API产品的零配件供应,以最大地方便客户,为客户提供最优质的服务。
API激光干涉仪使用方法
API激光干涉仪使用方法
1、开机:接通电源打开电源开关,1分钟后开始检测。
(因为刚开机激光器不稳定)
2、光路调整:旋上适合的标准镜头使标准镜头的星点对准寻星窗口中间的黑点,显示器上显示完整的圆形图像。
3、透镜面形检测:调节沉座到被检透镜的适合尺寸,(建议大批量固定透镜的检测,自己加工固定的沉座)放上透镜调节高度和透镜调节钮使透镜的星点与标准镜头的星点重合,观测显示器是否出现干涉条纹,条纹越少精度越高。
干涉图像与对准系统同步,无需切换,任何人都能简单操作。
星点重合干涉条纹(判读可参考第三节)
沉座尺寸M46X1M70X1高度调节机构
高度调节结构选择加长的测试轨道来配合测量尺寸,可简便的测量出曲率半径。
4、透镜曲率半径检测:开启标尺电源开关(清零),调整图像到看清直线干涉条纹(3条到5条),凸透镜向上调节高度(凹透镜向下调节高度)到第2个星点出现的时候调节标准镜头调节旋钮,使图像出现猫眼像,标尺移动的数值就为被测透镜的曲率半径。
猫眼干涉条纹
标尺(标尺上红点按键为标尺电源开关长按标尺红点按键为关)。
激光平面干涉仪说明书讲解

一、用途激光平面干涉仪是一种使用方便的光学精密计量仪器,主要用于精密测量光学平面度。
仪器配有激光光源(波长为632.8nm)。
对于干涉条纹可目视、测量读数。
工作时对防震要求一般。
该仪器可应用与光学车间、实验室、计量室。
如需配购相关的必要附件,可精密测量光学平面的微小楔角、光学材料折射率n的均匀性,光学镀膜面或金属块规表面的平面度,90度棱镜的直角误差及角锥棱镜单角和综合误差。
二、主要数据1. 第一标准平面(A面),不镀膜。
工作直径:D1=φ146mm不平度小于0.02um2.第二标准平面(B面),不镀膜。
工作直径:D2=φ140mm不平度小于0.03um3.准直系统:孔径F/2.8,工作直径:D0=φ146mm焦距:f=400mm4.测微目镜:焦距f=16.7mm,放大倍数β=15X,视场角2W=40°,成像物镜:1.D=4.5 II.D=7 III.D=10F=15 f=23 f=375.工作波长:632.8nm6.干涉室尺寸:深260X宽300X190mm。
7.光源规格:激光ZN18(He-Ne)。
8.仪器的外形尺寸:长X宽X高 350X400X720mm9.仪器重量:100公斤图一第一标准平面(A面)精度照片图二第二标准平面(B面)三、工作原理本仪器工作基于双光束等厚干涉原理。
根据近代光学的研究结果,光兼有波动与颗粒两重特性。
光的干涉现象是光的波动性的特性。
因此,介绍本节内容时,仅在光的波动性的范围内讨论,例如,把“光”称为“光波”,“平行光”称为“平面光”。
波长为的单色光经过仪器有关的光学系统后成为平面波M。
(如图三所示),经仪器的标准平面P1和被检系统P2反射为平面波M1和 M2。
M1、M2即为两相干光波,重叠后即产生等厚干涉条纹。
等厚干涉原理能够产生干涉的光束,叫相干光。
相干光必须满足三个条件:1.震动方向必须一致,2.频率相等:3.光束必须相遇,且在相遇点处的相位差在整个时间内为一常量。
激光干涉仪测量原理及应用
激光干涉仪测量原理及应用激光干涉仪是一种基于干涉原理的精密测量仪器,广泛应用于科学研究、工业制造和医疗领域。
本文将介绍激光干涉仪的测量原理、测量对象以及应用领域。
一、测量原理激光干涉仪利用激光光束的干涉现象进行测量。
首先,通过激光发生器产生一个相干的激光束,然后将光束分为两束,其中一束通过参比光路径传播,另一束通过待测物体的表面反射。
两束光束重新合并后,通过干涉现象形成干涉条纹。
根据干涉条纹的变化,可以计算出待测物体的表面形态、位移或变形信息。
在激光干涉仪中,常用的测量原理有两条著名的分支:相位差法和长度差法。
1. 相位差法相位差法通过测量干涉条纹的相位差来确定待测物体的形态、位移或变形信息。
当待测物体发生形变或位移时,相位差会发生变化。
利用激光干涉仪测量相位差,并通过相位差与位移间的关系,可以获得待测物体的位移信息。
2. 长度差法长度差法通过测量干涉条纹的长度差来确定待测物体的形态、位移或变形信息。
待测物体的表面形态、位移或变形导致光程差的改变,进而影响干涉条纹的长度差。
通过测量长度差,并通过长度差与位移间的关系,可以获得待测物体的位移信息。
二、测量对象激光干涉仪广泛应用于各个领域的测量任务中,包括科学研究、工业制造和医疗领域。
1. 科学研究在科学研究领域,激光干涉仪常用于测量微小位移和形变。
例如,在光学领域,激光干涉仪可用于测量光学元件的表面形态和位移,以及光学系统的变形;在材料科学中,激光干涉仪可用于测量材料的热膨胀、压力变形等。
2. 工业制造在工业制造领域,激光干涉仪被广泛应用于检测和测量任务中。
例如,激光干涉仪可以用于检测零件的形状和尺寸,以确保制造过程的准确性和一致性。
此外,激光干涉仪还可以用于测量机械零部件的运动、振动和变形。
3. 医疗领域在医疗领域,激光干涉仪被应用于眼科手术和体内干涉成像。
在眼科手术中,激光干涉仪可以测量眼角膜的形态和厚度,以辅助眼科医生进行手术;在体内干涉成像中,激光干涉仪可以测量生物组织的纤维结构和表面形态,以帮助医生进行疾病诊断。
激光干涉仪原理及实验装置概述
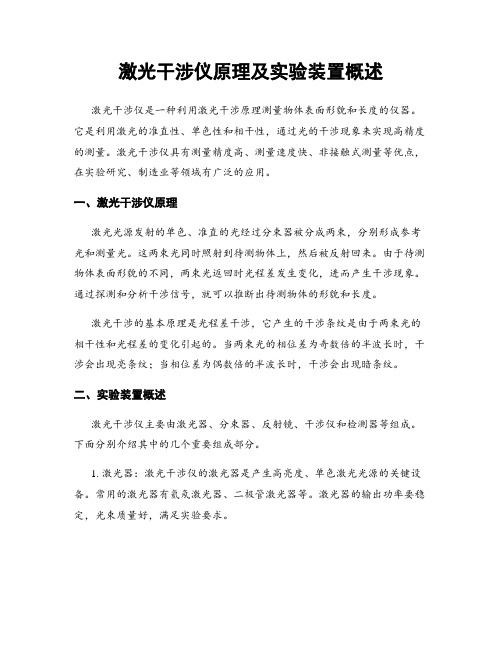
激光干涉仪原理及实验装置概述激光干涉仪是一种利用激光干涉原理测量物体表面形貌和长度的仪器。
它是利用激光的准直性、单色性和相干性,通过光的干涉现象来实现高精度的测量。
激光干涉仪具有测量精度高、测量速度快、非接触式测量等优点,在实验研究、制造业等领域有广泛的应用。
一、激光干涉仪原理激光光源发射的单色、准直的光经过分束器被分成两束,分别形成参考光和测量光。
这两束光同时照射到待测物体上,然后被反射回来。
由于待测物体表面形貌的不同,两束光返回时光程差发生变化,进而产生干涉现象。
通过探测和分析干涉信号,就可以推断出待测物体的形貌和长度。
激光干涉的基本原理是光程差干涉,它产生的干涉条纹是由于两束光的相干性和光程差的变化引起的。
当两束光的相位差为奇数倍的半波长时,干涉会出现亮条纹;当相位差为偶数倍的半波长时,干涉会出现暗条纹。
二、实验装置概述激光干涉仪主要由激光器、分束器、反射镜、干涉仪和检测器等组成。
下面分别介绍其中的几个重要组成部分。
1. 激光器:激光干涉仪的激光器是产生高亮度、单色激光光源的关键设备。
常用的激光器有氦氖激光器、二极管激光器等。
激光器的输出功率要稳定,光束质量好,满足实验要求。
2. 分束器:分束器是将激光分成两束光的光学元件。
常用的分束器有半反射镜、双折射晶体等。
分束器需要具备高反射和高透射的特性,以保证光能被正确地分割。
3. 反射镜:反射镜用于将分出的两束光照射到待测物体上,并接收反射回来的光。
反射镜要具备高反射率、光学稳定性和机械稳定性,以保证光的质量和测量的稳定性。
4. 干涉仪:干涉仪是激光干涉仪中的核心部件,用于产生干涉现象并形成干涉条纹。
常用的干涉仪有马赫曾德干涉仪、迈克尔逊干涉仪、光栅干涉仪等。
不同类型的干涉仪适用于不同的实验需求。
5. 检测器:检测器用于接收干涉信号并将其转化为电信号,以实现干涉信号的分析和处理。
常用的检测器有光电二极管、CCD等。
检测器的灵敏度和响应速度需要满足实验测量的要求。
激光干涉仪相关基础知识

一.激光干涉仪概述激光干涉仪,以激光波长为已知长度,利用迈克耳逊干涉系统测量位移的通用长度测量工具。
SJ6000激光干涉仪产品采用美国进口高稳频氦氖激光器、激光双纵模热稳频技术、高精度环境补偿模块、几何参量干涉光路设计、高精度激光干涉信号处理系统、高性能计算机控制系统技术,实现各种参数的高精度测量。
通过激光热稳频控制技术,实现快速(5~10分钟)、高精度(0.05ppm)、抗干扰能力强、长期稳定性好的激光频率输出,采用不同的光学镜组可以测量出线性、角度、直线度、平面度和垂直度等几何量,并且可以进行动态分析。
二.激光干涉仪工作原理激光器发射单一频率光束射入线性干涉镜,然后分成两道光束,一道光束(参考光束)射向连接分光镜的反射镜,而第二道透射光束(测量光束)则通过分光镜射入第二个反射镜,这两道光束再反射回到分光镜,重新汇聚之后返回激光器,其中会有一个探测器监控两道光束之间的干涉(见图)。
若光程差没有变化时,探测器会在相长性和相消性干涉的两极之间找到稳定的信号。
若光程差有变化时,探测器会在每一次光程变化时,在相长性和相消性干涉的两极之间找到变化信号,这些变化会被计算并用来测量两个光程之间的差异变化。
三.激光干涉仪功能SJ6000激光干涉仪产品具有测量精度高、测量速度快、最高测速下分辨率高、测量范围大等优点。
通过与不同的光学组件结合,可以实现对直线度、垂直度、角度、平面度、平行度等多种几何精度的测量。
在相关软件的配合下,还可以对数控机床进行动态性能检测,可以进行机床振动测试与分析,滚珠丝杆的动态特性分析,驱动系统的响应特性分析,导轨的动态特性分析等,具有极高的精度和效率,为机床误差修正提供依据。
1.静态测量SJ6000激光干涉仪的系统具有模块化结构,可根据具体测量需求选择不同组件。
SJ6000基本线性测量配置:SJ6000全套系统:1.1. 线性测量1.1.1. 线性测量构建要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,这个组合装置就是“线性干涉镜”。
激光干涉仪原理
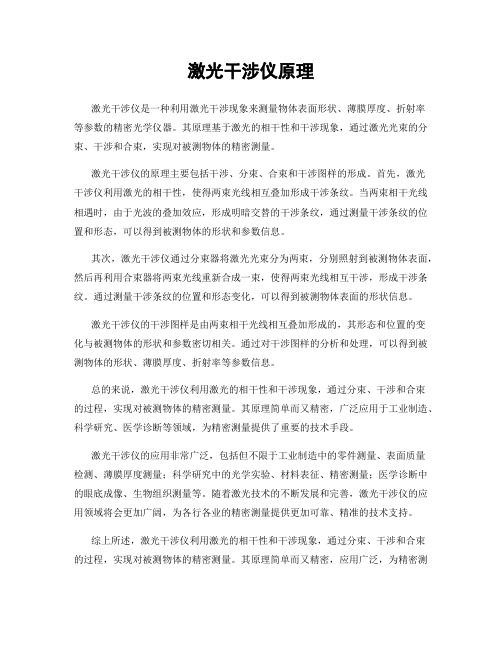
激光干涉仪原理激光干涉仪是一种利用激光干涉现象来测量物体表面形状、薄膜厚度、折射率等参数的精密光学仪器。
其原理基于激光的相干性和干涉现象,通过激光光束的分束、干涉和合束,实现对被测物体的精密测量。
激光干涉仪的原理主要包括干涉、分束、合束和干涉图样的形成。
首先,激光干涉仪利用激光的相干性,使得两束光线相互叠加形成干涉条纹。
当两束相干光线相遇时,由于光波的叠加效应,形成明暗交替的干涉条纹,通过测量干涉条纹的位置和形态,可以得到被测物体的形状和参数信息。
其次,激光干涉仪通过分束器将激光光束分为两束,分别照射到被测物体表面,然后再利用合束器将两束光线重新合成一束,使得两束光线相互干涉,形成干涉条纹。
通过测量干涉条纹的位置和形态变化,可以得到被测物体表面的形状信息。
激光干涉仪的干涉图样是由两束相干光线相互叠加形成的,其形态和位置的变化与被测物体的形状和参数密切相关。
通过对干涉图样的分析和处理,可以得到被测物体的形状、薄膜厚度、折射率等参数信息。
总的来说,激光干涉仪利用激光的相干性和干涉现象,通过分束、干涉和合束的过程,实现对被测物体的精密测量。
其原理简单而又精密,广泛应用于工业制造、科学研究、医学诊断等领域,为精密测量提供了重要的技术手段。
激光干涉仪的应用非常广泛,包括但不限于工业制造中的零件测量、表面质量检测、薄膜厚度测量;科学研究中的光学实验、材料表征、精密测量;医学诊断中的眼底成像、生物组织测量等。
随着激光技术的不断发展和完善,激光干涉仪的应用领域将会更加广阔,为各行各业的精密测量提供更加可靠、精准的技术支持。
综上所述,激光干涉仪利用激光的相干性和干涉现象,通过分束、干涉和合束的过程,实现对被测物体的精密测量。
其原理简单而又精密,应用广泛,为精密测量提供了重要的技术手段。
随着激光技术的不断发展,激光干涉仪的应用领域将会更加广阔,为各行各业的精密测量提供更加可靠、精准的技术支持。
激光干涉仪相关基础知识

一.激光干涉仪概述激光干涉仪,以激光波长为已知长度,利用迈克耳逊干涉系统测量位移的通用长度测量工具。
SJ6000激光干涉仪产品采用美国进口高稳频氦氖激光器、激光双纵模热稳频技术、高精度环境补偿模块、几何参量干涉光路设计、高精度激光干涉信号处理系统、高性能计算机控制系统技术,实现各种参数的高精度测量。
通过激光热稳频控制技术,实现快速(5~10分钟)、高精度(0.05ppm)、抗干扰能力强、长期稳定性好的激光频率输出,采用不同的光学镜组可以测量出线性、角度、直线度、平面度和垂直度等几何量,并且可以进行动态分析。
二.激光干涉仪工作原理激光器发射单一频率光束射入线性干涉镜,然后分成两道光束,一道光束(参考光束)射向连接分光镜的反射镜,而第二道透射光束(测量光束)则通过分光镜射入第二个反射镜,这两道光束再反射回到分光镜,重新汇聚之后返回激光器,其中会有一个探测器监控两道光束之间的干涉(见图)。
若光程差没有变化时,探测器会在相长性和相消性干涉的两极之间找到稳定的信号。
若光程差有变化时,探测器会在每一次光程变化时,在相长性和相消性干涉的两极之间找到变化信号,这些变化会被计算并用来测量两个光程之间的差异变化。
三.激光干涉仪功能SJ6000激光干涉仪产品具有测量精度高、测量速度快、最高测速下分辨率高、测量范围大等优点。
通过与不同的光学组件结合,可以实现对直线度、垂直度、角度、平面度、平行度等多种几何精度的测量。
在相关软件的配合下,还可以对数控机床进行动态性能检测,可以进行机床振动测试与分析,滚珠丝杆的动态特性分析,驱动系统的响应特性分析,导轨的动态特性分析等,具有极高的精度和效率,为机床误差修正提供依据。
1.静态测量SJ6000激光干涉仪的系统具有模块化结构,可根据具体测量需求选择不同组件。
SJ6000基本线性测量配置:SJ6000全套系统:1.1. 线性测量1.1.1. 线性测量构建要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,这个组合装置就是“线性干涉镜”。
激光干涉仪技术参数

用途及技术特点:用于数控设备、测量仪器等产品的直线轴线性定位精度、俯仰扭摆小角度精度、直线度的检测与验收。
★激光干涉仪系统所有测量功能均采用激光波长作为测量基准,具有溯源性。
不采用四象限传感器等测量角度或直线度方法。
★仪器扩展性、兼容性和互换性:可以进行多轴机床的误差补偿及回转轴精度标定,可与其他数字指示器设备配合使用, 实现设备几何精度的检测。
★双轴测量软件:可在一台计算机上连接并控制二台相同型号的激光系统,提供了同步采集两平行轴数据的能力。
★动态测量功能:可以进行机床系统动态测试,利用动态特性测量与评估软件,对导轨的动态特性进行分析,对机器故障源进行诊断。
1、激光头:1.1、★激光头具备80米测量能力;1.2、★激光稳频精度(开机一小时开始拍频):≤±0.01ppm;1.3、★系统预热(进入精密测量)准备时间:≤6分钟;1.4、接口:内置USB连接,无需单独接口;外部电源,90 V AC - 264 V AC1.5、标准配置还具有一个辅助模拟信号输出、触发信号输入;1.6、激光头前部具备光强状态指示灯,以方便激光准直;2、补偿单元和传感器:2.1接口:内置USB通讯端口,无需单独的接口;2.2内部传感器:空气压力、相对湿度;2.3外部传感器:1个空气温度传感器、1个材料温度传感器;2.4传感器参数:3、线性测量参数:4、角度(俯仰与扭摆)测量参数:5、短距直线度测量:6、软件包:6.1 系统手册说明书包含每个测量功能的文字说明和图解设定步骤、校准技巧及分析信息,可安装在计算机上并使用软件的“帮助”按钮直接进入或作为独立的参考文献使用;6.2、★软件包括线性、角度、回转轴、平面度、直线度、垂直度、双轴及动态测量,数控机床测量程序自动生成软件功能;6.3、★双轴测量软件可在一台计算机上连接并控制二台相同型号的激光系统,提供了同步采集两平行轴数据的能力,从双轴上采集的数据同时显示在PC机上并根据要求存储起来,然后分别加以分析;用以同步测量机床的主动轴和从动轴间的同步误差检测。
API激光干涉仪操作步骤
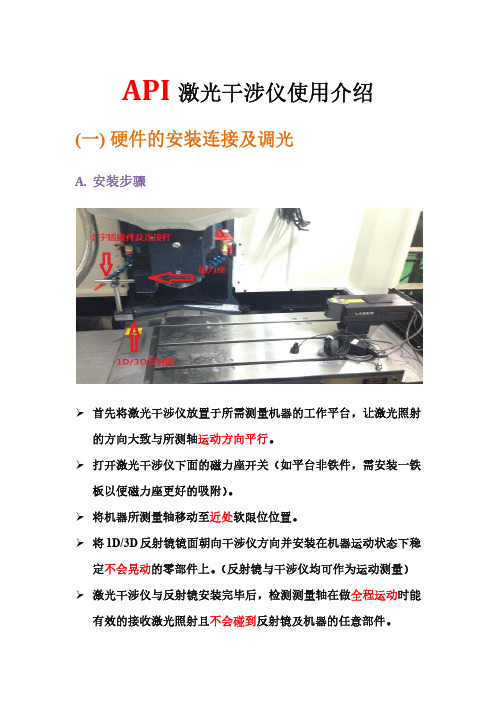
API激光干涉仪使用介绍(一)硬件的安装连接及调光A.安装步骤首先将激光干涉仪放置于所需测量机器的工作平台,让激光照射的方向大致与所测轴运动方向平行。
打开激光干涉仪下面的磁力座开关(如平台非铁件,需安装一铁板以便磁力座更好的吸附)。
将机器所测量轴移动至近处软限位位置。
将1D/3D反射镜镜面朝向干涉仪方向并安装在机器运动状态下稳定不会晃动的零部件上。
(反射镜与干涉仪均可作为运动测量) 激光干涉仪与反射镜安装完毕后,检测测量轴在做全程运动时能有效的接收激光照射且不会碰到反射镜及机器的任意部件。
B.硬件连接注意事项在做硬件连接前请将电源开关置于关闭状态气象站接口(weather)在连接前请务必注意方向性,拔出时请捏住根部弹簧接口拔出,对野蛮插拔导致接口损坏,API不予保修 电源线接口(DC IN 12V)有螺旋扣,在连接时需注意。
在安装好激光干涉仪后将水平与垂直方向的旋钮调整至中间位置,以确保在光路调整过程中两个方向均有可调节的余量。
气象站材料温度传感器和空气温度传感器以及大气压力传感器请放置于机器的工作台面上。
C.光路调节步骤1.将反射镜前面的旋转盖进行旋转,让旋转盖上的白点置于下方2.移动机器测量轴将干涉仪(或反射镜)移动至两者最近端3.借助机器的控制手柄或手轮移动其他两个轴,让激光干涉仪的光线照射在反射镜的白点位置,如无控制手柄可借助的情况下请调节反射镜处的磁力座或十字插接件上的连接杆进行移动调节4.移动机器测量轴将干涉仪(或反射镜)移动至两者最远端5.如果激光照射在白点水平位置距离偏差过大致使调节旋钮超越可调范围,请松开激光干涉仪下方的磁力座开关,移动干涉仪适量角度确保激光照射在白点垂直线上6.此时调节激光干涉仪主机右侧及下方的调节旋钮,使激光光线照射在反射镜白点的中心位置7.重复2、3、4、6步骤,来回往返数次,让激光全程照射在反射镜白点中心,此刻初次调光完成,将反射镜前端的旋转盖进行90度或-90度旋转致使白点置于左右两侧8.打开软件主界面,线性光强窗口条幅深绿色,数值100%(机器测量轴全程运动时),1D的配置的激光干涉仪即可有效的测量线性精度9.3D配置的激光干涉仪相对于1D配置的激光干涉仪拥有的测量线性精度功能的同时,还增加了XX(水平方向)和YY(垂直方向)的直线度测量。
API激光干涉仪

API激光干涉仪产品型号: 5D/6D产品简介:5D/6D标准型:1. 线性:0.5ppm2. 测量范围:40米(1D可选80米)3. 偏摆角和俯仰角的精度:(1.0+0.1/m)角秒或1%显示较大值4. 最大范围:800角秒5. 滚动角精度:1.0角秒6. 直线度精度:(1.0+0.2/m)um或1%显示较大值7. 最大范围:500um8. 垂直度精度:1角秒9. 温度:0.2摄氏度10.湿度:5%11.压力:1mmHg5D/6D精密型:1. 线性:0.2ppm2. 测量范围:25米3. 偏摆角和俯仰角的精度:(0.5+0.05/m)角秒或1%显示较大值4. 最大范围:400角秒5. 滚动角精度:0.5角秒6. 直线度精度:(0.5+0.1/m)um或1%显示较大值7. 最大范围:300um8. 垂直度精度:0.5角秒9. 温度:0.1摄氏度10.湿度:3%11.压力:0.3mmHg5D/6D高精密型:1. 线性:0.2ppm2. 测量范围:根据用户要求而定3. 偏摆角和俯仰角的精度:(0.2+0.02/m)角秒4. 最大范围:500角秒5. 滚动角精度:0.5角秒6. 直线度精度:(0.2+0.05/m)um7. 最大范围:100um8. 垂直度精度:0.5角秒9. 温度:0.1摄氏度10.湿度:3%11.压力:0.3mmHg主要特点:1. 同时测量线性定位误差、直线度误差(双轴)、偏摆角、俯仰角和滚动角2. 设计用于安装在机床主轴上的5D/6D传感器3. 可选的无线遥控传感器最长的控制距离可到25米4. 可测量速度、加速度、振动等参数,并评估机床动态特性。
5. 全套系统重量仅15公斤,设计紧凑、体积小,测量机床时不需三角架6. 集成干涉镜与激光器于一体,简化了调整步骤,减少了调整时间产品详细介绍:5D/6D激光干涉仪是API的专利产品,一次安装能够同时测量线性轴的六个误差,包括1个位置度误差、2个直线度误差、3个角度误差。
激光干涉仪讲解
第一章、前言—、本次我们主要研究:如何检测机床的螺距误差。
因此我们主要的任务在于:1.应该使用什么仪器进行测量2.怎么使用测量仪器3.怎么进行数据分析4.怎么将测量所得的数据输入对应的数控系统二、根据第一点的要求,我们选择的仪器为:Renishaw激光器测量系统.此仪器检测的范围包括:1.线性测量2.角度测量3.平面度测量4.直线度测量5.垂直度测量6.平行度测量线性测量:是激光器最常见的一种测量。
激光器系统会比较轴位置数显上的读数位置与激光器系统测量的实际位置,以测量线性定位精度及重复性。
三、根据第二点的解释,线性测量正符合我们检测螺距误差的要求。
因此,我们此次使用的检测方法——线性测量。
总结以上我们的核心在于:如何操作Renishaw激光器测量系统结合线性测量的方法进行检测.之后将检测得到的数据进行分析.最后将分析得到的数据存放到数控系统中。
这样做的目的在于一:是高机床的精度。
-1 -A-/r- -^― .Trt".弟一早、2.1什么是螺距误差?基础知识开环和半闭环数控机床的定位精度主要取决于高精度的滚珠丝杠。
但丝杠总有—定螺距误差,因此在加工过程中会造成零件的外形轮廓偏差。
由上面的原因可以得知:螺距误差是指由螺距累积误差引起的常值系统性定位误差。
2.2为什么要检测螺距i 吴差?根据2.1节,检测螺距误差是为了减少加工过程中造成零件的外形轮廓偏差,即提高机床的精度。
2.3怎么检测螺距误差?(1)安装高精度位移检测装置。
(2)编制简单的程序,在整个行程中顺序定位于一些位置点上。
所选点的数目及距离则受数控系统的限制。
(3)记录运动到这些点的实际精确位置。
(4)将各点处的误差标出,形成不同指令位置处的误差表。
(5)多次测量.取平均值。
(6)将该表输入数控系统,数控系统将按此表进行补偿。
2.4什么是增量型误差、绝对型误差?①增量型误差增量型i吴差是指:以被补偿轴上相邻两个补偿点间的误差差值为依据来进行补偿②绝对型误差绝对型是误差是指:以被补偿轴上各个补偿点的绝对误差值为依据来进行补偿2.5螺距误差补偿的原理是什么?螺距误差补偿的基本原理就是将数控机床某轴上的指令位置与高精度位置测量系统所测得的实际位置相比较•计算出在数控加工全行程上的误差分布曲线,再将误差以表格的形式输入数控系统中。
激光干涉仪原理介绍

激光干涉仪原理介绍激光干涉仪(Interferometer)是一种基于干涉原理的精密测量仪器。
它利用激光的相干性和波动性,通过测量光程差或位相差的变化,可以对物体的长度、形状、表面质量等进行高精度的测量。
本文将介绍激光干涉仪的原理、构成和使用方法。
一、激光干涉原理激光干涉仪的基本原理是激光光束的干涉,干涉是指两个或多个波的叠加形成的干涉图案。
激光干涉仪一般是利用两束平行或近似平行的激光光束进行干涉。
当两束光束相遇时,由于光的波动性,会产生相长相消的干涉条纹。
根据干涉条纹的变化,可以测量物体表面的形状、光程差等。
二、激光干涉仪的构成1.激光器:激光干涉仪使用的激光器一般是氦氖激光器或半导体激光器,能够提供稳定的、单色、相干光源。
2.分束器:分束器是将激光光束分为两束平行的光束的光学元件,常用的分束器有半反射镜或分波镜。
分束器分为两个光路,一个称为参考光路,另一个称为测量光路。
3.反射镜:反射镜用于将分离出的两束光束反射回归并形成干涉。
反射镜一般被安置在待测物体的两端,将参考光束和测量光束反射回到检波器。
4.检波器:检波器用于测量干涉条纹的强度和位置。
常用的检波器有光电二极管和CCD相机等。
它将干涉图案转化为电信号,方便进行数据分析和处理。
三、激光干涉仪的使用方法1.相对干涉法:相对干涉法是通过比较两个物体之间的长度差异来测量物体的形状或表面质量。
在测量时,将待测物体和参考物体分别安置在两个光路中。
随后,根据两个干涉图案的变化,可以计算出两个物体之间的长度差异。
2.绝对干涉法:绝对干涉法是通过测量干涉图案中的位相差来进行测量。
在测量时,同时测量待测物体和参考物体表面的干涉图案。
通过分析两个干涉图案的位相差,可以计算出物体表面的形状和高度差。
应用领域:在制造业中,激光干涉仪常用于测量工件的形状、平整度和表面光洁度。
例如,在光学元件的制造中,可以使用激光干涉仪来精确测量元件的曲率和表面误差。
在科学研究中,激光干涉仪可用于测量物体的振动、变形和位移等动态过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d1 -d2 L 平行光入射时 L 非平行光入射时
y -x 透镜 -y PSD光电位置 敏感检测器 x
测量结果输出
偏摆角
俯仰角
滚动角
五、API XD干涉仪独有技术
API XD干涉仪独有技术 — 滚动角测量
采用双电子水平仪技术
+电子水平仪
API XD干涉仪独有技术 — 水平转台测量
测量转台的分度精度
机床单一直线轴几何误差(示意)
直线度误差 (XX及YY方向) (偏摆角) (俯仰角)
(滚动角) 线性定位误差(定位精度, 重复定位精度, 反向间隙)
API公司 XD系列激光干涉仪
线性定位误差
(定位精度, 重复定位精度, 反向间隙)
一维测量系统 XD – 1D
标准型&精密型
直线度误差 数控直线轴
(XX及YY方向)
线性定位误差测量
API XD干涉仪的测量方法:
一次安装也可同时测量其它五个参数;
可利用电脑中的直线度实时显示,
数字化精确去除余弦差,测量准确; 两点调光,对光迅速.
传统干涉仪因对光不准易产生余弦差 (导致测量值小于实际值)
线性定位误差测量
测量结果输出
二、直线度测量
直线度测量— 旧的方法
通过经分光镜分出的两束光经直线度反射镜返回干涉镜后产生的光程差与固定角 度的比值计算出的(如下图),属非1:1的测量 测量时绝不允许断光, 不能用于导轨的安装调节, 只能用于最终评价 分光时的角度决定了测量直线度的精度,分角越大灵敏度越好,但对于分角越大 所测得距离就会越短,所以测直线度时分为短距离镜组(0.1 - 4 m)和长距离镜 (1 - 30 m),且分光角度和反射镜的平面度随环境温度变形影响测量精度; 测量直线度时调整光路的要求是非常苛刻的,一定要保证分出的两条光路与直线 度反射镜两镜面垂直且还要保证光束准直,直线度镜组间有严格的匹配关系,即 使横向和纵向反射镜间也绝不允许互换使用,这样就使得镜组复杂繁多,给日常 维护带来极大的不便
爱佩仪中测(成都)精密仪器有限公司
美国API公司 总部
美国, 马里兰州
机床主要误差
激光干涉仪
线性定位误差
主轴测量系统
主轴温升 温升热变性误差 导轨温升变性 切削热变性 直线度误差
(XX及YY方向)
几何误差 (21项)
垂直度 偏摆角(A) 俯仰角(B) 滚动角(C) 操作误差
刀具安装 工件定位 切削速度
激光干涉仪用户 (二)
序号 11 12 13 14 15 16 17 18 19 20 北京第一机床厂 大连重工集团公司 大同机车 北京交通大学 油机机械(昆山)有限公司 明鑫机床厂 哈尔滨东安发动机 任丘机床 时代公司(鞍钢机械厂) 沈阳黎明发动机厂 用户名称 产品名称 6D激光干涉仪 激光干涉仪 5D激光干涉仪 5D激光干涉仪 激光干涉仪 激光干涉仪 5D激光干涉仪 激光干涉仪 5D激光干涉仪 3D激光干涉仪 数量 1 1 1 1 2 1 1 1 1 1
XD系列激光干涉仪特点
测量原理 (五维)
干涉仪 主 机 干涉镜 俯仰及偏摆 角检测模块 干涉仪 分光镜
直线度检 测模块 干涉仪 磁性座 干涉仪 反射镜
XD系列激光干涉仪特点
测量原理 (六维)
+电子水平仪
XD系列激光干涉仪特点
先进的结构设计
API公司采用了稳定钢球与绝热层的双重定位设计(如下图),将干涉镜用高 绝热层与激光器主机隔开,从而避免了干涉镜受热变形,用稳定钢珠将干涉 镜前端的干涉区与下端底盘定位相连,从而使激光管及电路板发热而引起的 热膨胀方向沿稳定钢珠中线向后,使得干涉镜不受影响,保证了测量准确性
设计理念:
大大提高测量效率,减少机床受检时间 最高测量精度: 0.5 ppm (标准型) 0.2 ppm (精密型) 提高实际测量精度 降低使用难度 便携性
XD系列激光干涉仪特点
测量机床全部误差所用的时间越短,越能 够反映所测机床的真实情况。当用传统干 涉仪测量时,因在测量各项指标时更换光 学镜调整光路上要浪费大量的时间,难以 保证机床检测数据的稳定性和重复再现性
环境因素:
环境温度: 变化1 ℃, 引起误差: 1 ppm (1微米/1米长); 大气压力: 变化2.5 mmHg, 引起误差: 1 ppm: 相对湿度: 变化50%,引起误差: 1 ppm; 材料温度: 变化1 ℃, 引起误差: 11 ppm (钢), 23 ppm (铝);
激光干涉仪测量精度(标准型):
垂直度测量— API XD的方法
API XD激光干涉仪是通过PSD技术1:1进行直线度测量的,所以API干涉仪测两 轴垂直度时只需一个五角棱镜既可,无需其他镜组. 装/调非常方便快速 在测两轴的垂直度的同时,两轴各自的线性定位误差、直线度,偏摆角、俯仰 角都可一次测出,大大节省了测量所占用机床的时间,也可避免人为差错
一次安装能测量6项精度指标
包括线性定位误差、XX及YY两个方向直线度、 偏摆角、俯仰角、滚动角
把反射镜换成五棱镜既可测量两轴间垂直度 两点调光线. 无需三脚架. 测量调整简单快速 传统激光干涉仪测量20项精度指标(三轴),约需3天的时间;API干涉仪只约需半天! 测量直线度/小角度/垂直度/转台时, 不怕断光, 可当自准直仪用, 用于机床装配调试
使用API XD-5D后, 9 小时 1.5 小时 / 1轴
机床(HMC)导轨垂直度检测
激光切割机检测
数控立式磨床检测
七、用户清单
激光干涉仪用户 (一)
序号 1 2 3 4 5 6 7 8 用户名称 航空部精密机械研究所 哈尔滨飞机制造厂 中国计量院 深圳计量院 信息产业部电子五所 福州大学 航天部五院529厂 重庆计量院 产品名称 5D激光干涉仪 激光干涉仪 6D激光干涉仪 5D激光干涉仪 1D激光干涉仪 5D激光干涉仪 5D激光干涉仪 5D激光干涉仪 5D激光干涉仪 5D激光干涉仪 6D激光干涉仪 9 成都中测院 1D激光干涉仪 1D激光干涉仪 10 中南精密机械公司 5D激光干涉仪 数量 2 3 1 1 2 1 1 1 1 1 2 4 2 1
检测机床/CMM(坐标测量机)对角线(示意)
API XD 检测导轨平行度(示意)
适用于XD-3D、5D或6D
同时测量水平面和垂直面内的平行度
API XD 检测平板平面度(示意)
待测面 传感器和平台
激光头
机床(VMC)检测
美国Brown & Sharpe 坐标机检测
(旧)机床检定 (波音工厂)
仪器测量误差: 0.5 ppm (0.5微米/米) 激光长期稳频精度: 0.05 ppm
结论: 减少机床的受检时间十分重要!!!
XD系列激光干涉仪
• 约在2000年进入中国市场,是后来者 • 认真研究了前者的优缺点,扬长避短 • 结合激光干涉技术和光电自准直技术: 不仅可用 于精度的最终评价, 也可用于机床的安装调整
激光干涉仪用户 (四)
序号 31 32 33 34 35 36 37 38 39 40 用户名称 深圳新德丰精密机械公司 沈阳数控机床有限公司(沈阳东瑞) 中山市建德工业有限公司 东莞恒辉五金机器有限公司 上海市检测中心 特博精机(深圳)有限公司 浙江武义鸿业机床有限公司 辽宁省计量院 北京青云航空仪表有限公司 沈阳电器配件厂(沈阳东瑞) 产品名称 3D激光干涉仪 1D激光干涉仪 3D激光干涉仪 3D激光干涉仪 1D激光干涉仪 3D激光干涉仪 1D激光干涉仪 1D激光干涉仪 5D激光干涉仪 1D激光干涉仪 数量 1 1 1 1 1 1 1 1 1 1
激光器 发热区 绝热层 干涉镜 反射镜
实际热膨胀方向 调节钢珠 稳定钢珠
XD系列激光干涉仪特点
重量轻、体积小、携带方便
长470 mm x 宽400 mm x 高250 mm
一、线性定位误差测量
线性定位误差测量— 旧的方法
激光头安装在机床工作台之外,机床所受的震动干扰和激光头的 不同,产生测量误差。特别是在带有空气弹簧减震系统的机器上 三点对光,操作复杂 依靠电脑上的光强条的强弱来对, 余弦差较大
如果测量水平方向的直线 度反射镜要水平放置,光 路要再调整一次,如果测 量3轴6个直线度。需要安 装6次光学镜,调整6次光 路。
β
测量长距离(大于4米)直线度时, 需换用长距离直线度测量镜
α
激光器
干涉镜
直线度 反射镜
直线度测量— API XD的方法
应用先进的PSD技术
(光电位置敏感检测器。它可将光敏面上的光点位置转化为电信号)
empowering metrology solutions
美国自动精密工程公司(API)
ห้องสมุดไป่ตู้
API 公司简介
1987年创建. 快速成长 雇员: 约500人 专业计量仪器. 现代计量技术的发明人,如: 激光跟踪仪、 激光干涉仪、角摆检测仪等 ASME B5.54 (美国机械工程协会)会员; B89.4.19 美国测量系统标委会)的成员 经A2LA(美国实验室国家认可委员会)认证授 权的检定实验室, 产品无须第三方检定 全球性的公司: 在欧洲、亚洲和北美都有销 售&服务机构和公司 中国: 5个代表处 2个公司: 爱佩仪自动精密仪器科技(上海)有限公司
API干涉仪
反射镜
五角棱镜
垂直度测量
测量结果输出
四、偏摆角/俯仰角测量
偏摆角/俯仰角测量— 旧的方法
激光束被角度干涉镜中包含的分光镜一分为二: 一部分光束(A1)直接通过干涉镜,并从 角度反射镜的某一半反射回激光头; 另一条光束(A2)通过角度干涉镜的角度分光镜,传 到角度反射镜的另一半,角度反射镜使光束通过干涉镜返回到激光头 通过比较光束 A1 和 A2 之间的光程差获取Δl值,再通过正弦计算从而得到角度测量 值α 因在参与计算的参数中d是个固定的数值,而在实际测量过程中d却是一个变化的参数, 主要影响d值变化的因素为: 1、角度反射镜受环境温度影响而产生形状位置误差 2、在测量过程中,受机床滚动角影响而发生变化 测量过程不能断光, 很难用于导轨的安装调试