手把手跟我学驱动(1)--框架及编译环境
windows驱动开发和调试环境搭建

Windows驱动开发和环境搭建【文章标题】: Windows驱动开发和调试的环境设置【文章作者】: haikerenwu【使用工具】: VC6.0,VMware6.0.3,Windbg【电脑配置】: 惠普笔记本xp sp3(一)VMWare安装篇VMWare的安装一路Next即可,关于其序列号,百度一下就能找到,虚拟机安装完成之后,需要安装操作系统,我在虚拟机中安装的是windows xp sp2系统。
点击“文件”----“新建”----“虚拟机”进入新建虚拟机的向导,配置虚拟系统参数选择虚拟系统文件的兼容格式(新手推荐选择默认选项)按照默认设置继续点击下一步,选择好您需要的操作系统,此处我选择的是Windows XP Prefessional。
设置虚拟机名称和虚拟操作系统安装路径,我单独空出来一个F 盘,将虚拟机和虚拟操作系统全部装在该盘。
配置网络模式(推荐选择NA T,一般主机不用做任何的设置虚拟机就可以利用主机上网)。
配置虚拟磁盘的容量。
在这里可以直接单击完成,来完成基本操作设置,磁盘默认空间是8GB,用户可以根据自己的实际使用情况来调整大小,也可以自定义分区。
操作完成之后,在“VM”菜单下有个“setting。
”菜单,点击此菜单,在CD-ROM中选择合适的选项,我使用的是Use ISO image 选项,将我的xp sp2操作系统的ISO映像路径设置好,安装操作系统。
点击ok之后,启动虚拟机,即开始安装操作系统,安装过程跟普通装机过程相同。
安装完成之后,启动操作系统,然后在VM菜单下点击“Install VMWare Tools”,把虚拟操作系统的驱动装好。
(二)VMWare设置篇虚拟操作系统安装完成之后,就是设置该系统为Windbg双机调试做准备。
关闭虚拟操作系统,添加一个虚拟串口,因为我的电脑是笔记本,现在的笔记本很少配置串口,所以要虚拟一个串口,这个过程由VMWare完成,图解如下。
Linux设备驱动程序原理及框架-内核模块入门篇
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
Windows驱动开发入门
接触windows驱动开发有一个月了,感觉Windows驱动编程并不像传说中的那么神秘。
为了更好地为以后的学习打下基础,记录下来这些学习心得,也为像跟我一样致力于驱动开发却苦于没有门路的菜鸟朋友们抛个砖,引个玉。
我的开发环境:Windows xp 主机+ VMW ARE虚拟机(windows 2003 server系统)。
编译环境:WinDDK6001.18002。
代码编辑工具:SourceInsight。
IDE:VS2005/VC6.0。
调试工具:WinDBG,DbgView.exe, SRVINSTW.EXE上面所有工具均来自互联网。
对于初学者,DbgView.exe和SRVINSTW.EXE是非常简单有用的两个工具,一定要装上。
前者用于查看日志信息,后者用于加载驱动。
下面从最简单的helloworld说起吧。
Follow me。
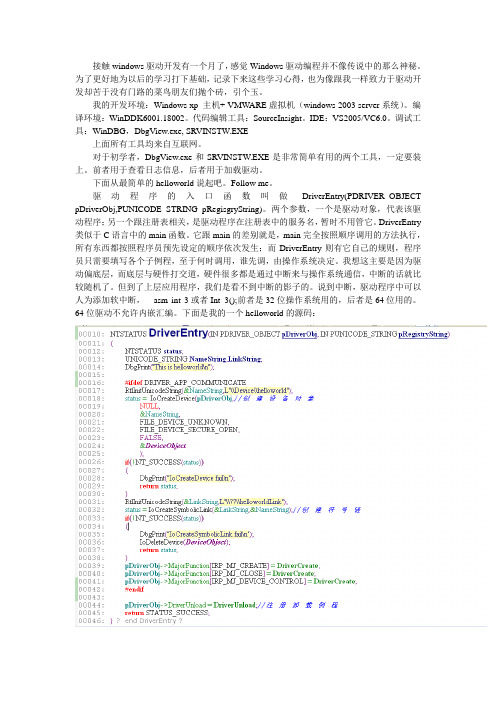
驱动程序的入口函数叫做DriverEntry(PDRIVER_OBJECT pDriverObj,PUNICODE_STRING pRegisgryString)。
两个参数,一个是驱动对象,代表该驱动程序;另一个跟注册表相关,是驱动程序在注册表中的服务名,暂时不用管它。
DriverEntry 类似于C语言中的main函数。
它跟main的差别就是,main完全按照顺序调用的方法执行,所有东西都按照程序员预先设定的顺序依次发生;而DriverEntry则有它自己的规则,程序员只需要填写各个子例程,至于何时调用,谁先调,由操作系统决定。
我想这主要是因为驱动偏底层,而底层与硬件打交道,硬件很多都是通过中断来与操作系统通信,中断的话就比较随机了。
但到了上层应用程序,我们是看不到中断的影子的。
说到中断,驱动程序中可以人为添加软中断,__asm int 3或者Int_3();前者是32位操作系统用的,后者是64位用的。
64位驱动不允许内嵌汇编。
下面是我的一个helloworld的源码:注意第16行的宏。
Windows驱动程序开发环境配置
Windows驱动程序开发笔记一、WDK与DDK环境最新版的WDK 微软已经不提供下载了这里:https:/// 可以下并且这里有好多好东东!不要走进一个误区:下最新版的就好,虽然最新版是Windows Driver Kit (WDK) 7_0_0,支持windows7,vista 2003 xp等但是它的意思是指在windows7操作系统下安装能编写针对windows xp vista的驱动程序,但是不能在xp 2003环境下安装Windows Driver Kit (WDK) 7_0_0这个高版本,否则你在build的时候会有好多好多的问题.上文build指:首先安装好WDK/DDK,然后进入"开始"->"所有程序"->"Windows Driver Kits"->"WDK XXXX.XXXX.X" ->"Windows XP"->"x86 Checked Build Environment"在弹出来的命令行窗口中输入"Build",让它自动生成所需要的库如果你是要给xp下的开发环境还是老老实实的找针对xp的老版DDK吧,并且xp无WDK 版只有DDK版build自己的demo 有个常见问题: 'jvc' 不是内部或外部命令,也不是可运行的程序。
解决办法:去掉build路径中的空格。
二、下载 WDK 开发包的步骤1、访问Microsoft Connect Web site站点2、使用微软 Passport 账户登录站点3、登录进入之后,点击站点目录链接4、在左侧的类别列表中选择开发人员工具,在右侧打开的类别:开发人员工具目录中找到Windows Driver Kit (WDK) and Windows Driver Framework (WDF)并添加到您的控制面板中5、添加该项完毕后,选择您的控制面板,就可以看到新添加进来的项了。
驱动程序开发入门

驱动程序开发入门2009-08-27 17:05/u2/82418/showart_1362078.html看了好多天的书!特别到书店买了《Windows 200/xp wdm 设备驱动开发》这本书,在这里我不想怎么评论它!对于高手来说,我觉得她一定不能满足,但是对于像我这样想入门的人来说,仿佛看了半天,还是不知道从何下手。
什么原理、模型、分层等等讲不讲,讲!绝对应该讲!但是你得快点告诉我怎么先弄一个像“Hello Word!”的什么简单来不能再简单的完整的例子给我呀!到网上找阿找啊!那些高手啊!也不为我们新手写点图文并茂的上手资料。
没办法!结合自己的需要再参考一些别人的东东,算是自己的一点不成熟的想法吧!我觉得下面这个介绍非常不错!我能看懂,所以贴了出来。
我道为什么找不到“Hello Word!”呢?原来在驱动开发的例子里是没有所谓的“Hello World”程序的。
这主要还是因为网络上的WDM资料太少造成的。
但是程序的入口点呢?c语言有Main(),用Vc的常看见的是WinMain(),Delphi开发的是Program里的Begin,但是驱动开发呢?那也是应该有程序的入口点啊。
后来我才明白了,那就是DriverEntry()函数。
还有一个问题让我怀疑了老半天,那就是驱动开发的源程序中需不需要include头文件呀?为什么会怀疑呢?那是因为我看了半天的书都没有看到一个完整的驱动程序结构。
真的是郁闷。
下面是我看到的一个完整的结构,我先放上来,让大家看看驱动开发的结构吧。
/***************************************************************程序名称:Hello World for WDM文件名称:HelloWDM.cpp日期:2002-8-16***************************************************************///一定要的头文件,声明了函数模块和变量:#include"HelloWDM.h"/***************************************************************函数名称:DriverEntry()功能描述:WDM程序入口(原来的WinMain被换成了DriverEntry,也是驱动程序的大门)***************************************************************///extern "C"是必须的,表示“用C链接”。
菜鸟驱动开篇

77. RtlInitUnicodeString(&ustrLinkName, LINK_NAME);
78.
79.
80. status = IoCreateSymbolicLink(&ustrLinkName, &ustrDevName);
81. //创建符号连接
33.
34. pDrvObject->MajorFunction[IRP_MJ_CLOSE] = DispatchClose;
35.
36. pDrvObject->MajorFunction[IRP_MJ_DEVICE_CONTROL] = DispatchIoctl;//指明IRP由那些分发函数处理
三、驱动入门
●驱动分类
常见的Windows 驱动程序是可以分成两类的:一类是不支持即插即用功能的
NT 式驱动程序,另一类是支持即插即用的WDM 式驱动程序。
NT 式驱动的安装是基于服务的,可以通过修改注册表进行,也可以直接通过服务函数
如CreateService 进行安装;但WDM 式驱动不同,它安装的时候需要通过编写一个inf 文件进行控制。
22. UNICODE_STRING ustrLinkName;//驱动设备名称,宏定义
23.
24. UNICODE_STRING ustrDevName; //驱动符号连接 ,宏定义
25.
26. PDEVICE_OBJECT pDevObject;
27.
105.
106. UNICODE_STRING strLink;
107.
108. RtlInitUnicodeString(&strLink, LINK_NAME);
WDM驱动程序开发之驱动框架篇:KDriver类

KDriver类:一、OverviewKDriver类提供了一个设备驱动程序的框架。
这个类的职责包括初始化驱动程序,把I/ O请求传递给它们的目标设备对象。
KDriver是一个抽象类,驱动编写人员必须写一个新的类来继承它。
新的子类必须重写DriverEntry函数,这是当系统载入驱动程序时框架要调用的函数。
这个派生类会有一个构造函数,但是构造函数不允许有参数。
一般来说,最好不要写这么一个构造函数。
把一切的初始化工作放在DriverEntry函数里来进行。
对于任何给定的驱动,只能有一个KDriver 类的实例存在,而且这个实例是框架自动创建的。
任何调用者可以通过调用DriverInstan ce静态函数来获得一个指向这个唯一实例的指针。
驱动编写人员必须做的另一件事情是通知框架:哪个类作为驱动框架来提供服务。
框架提供了定义了一个宏定义DECLARE_DRIVER_CLASS来实现这个事情。
任何一个驱动程序里都必须调用一次且只能调用一次这个宏,一般是在拥有DriverEntry函数的组件里。
这个宏必须放在任何函数之外,因为它事实上声明一个可以被框架调用的函数。
宏的参数应该是继承了KDriver类的那个类的名字。
除了DriverEntry,KDriver还有其他两个成员函数来做初始化的工作:RequestRei nitialization() 和Reinitialize()。
一个驱动程序在DriverEntry函数里调用RequestRe initialization()函数来指示系统调用Reinitialize()函数,作为第二级初始化。
而Reiniti alize()函数是一个可被重写的虚函数。
如果想要系统具有卸载(Unload)驱动的功能,就要在function.h文件里做一个声明:#define DRIVER_FUNCTION_UNLOAD。
这是虚函数Unload()的得到声明。
这个函数在基类中的实现代码调用了DeleteDevices() 函数来为这个驱动程序创建的每个设备调用析构函数。
李银辉windows驱动开发教程
李银辉windows驱动开发教程李银辉Windows驱动开发教程在计算机领域中,驱动程序是操作系统与硬件设备之间的桥梁,起到了关键的作用。
Windows操作系统中的驱动开发,是指为硬件设备编写相应的驱动程序,以实现操作系统与设备的通信和协同工作。
本篇文章将介绍李银辉编写的Windows驱动开发教程,帮助读者了解和掌握该领域的知识和技术。
一、什么是Windows驱动开发?Windows驱动开发是指为Windows操作系统编写设备驱动程序的过程。
驱动程序是操作系统的核心组成部分,负责管理和控制计算机硬件设备的工作。
通过编写驱动程序,可以实现对硬件设备的访问和控制,使其能够与操作系统无缝协同工作。
二、为什么需要学习Windows驱动开发?随着计算机技术的不断发展,硬件设备的种类和数量也在不断增加。
为了更好地支持和兼容各种硬件设备,Windows操作系统提供了丰富的驱动开发接口和工具。
学习Windows驱动开发可以帮助我们理解和掌握操作系统与硬件设备之间的交互原理,为开发高性能、高可靠性的驱动程序提供基础。
三、李银辉Windows驱动开发教程的特点作为国内著名的Windows驱动开发专家,李银辉编写的驱动开发教程具有以下特点:1.系统全面:李银辉的教程从驱动开发的基础知识开始讲解,逐步深入,涵盖了驱动程序开发的方方面面。
读者可以系统地学习和掌握驱动开发的各个环节和技术。
2.实践性强:李银辉的教程以实际案例为基础,通过编写具体的驱动程序来讲解相关的知识和技术。
读者可以通过实际的编程练习,加深对驱动开发原理和方法的理解。
3.案例丰富:李银辉的教程提供了大量的案例代码和实验,覆盖了多种设备类型和应用场景。
这些案例可以帮助读者更好地理解和应用所学知识,提升驱动开发的实际能力。
4.实用性强:李银辉的教程注重实用性,重点介绍了一些常见的驱动开发技术和工具,以及解决实际问题的方法。
读者可以通过学习这些内容,提高自己的驱动开发水平。
windows驱动开发教程

windows驱动开发教程Windows驱动开发是指在Windows操作系统下编写、调试和部署驱动程序的过程。
驱动程序是操作系统的核心组成部分,它负责与硬件设备通信,使得操作系统能够正确地识别、管理和控制硬件设备。
在本教程中,我们将介绍Windows驱动开发的基本概念、工具和流程。
首先,为了进行Windows驱动开发,我们需要准备好相应的开发工具。
其中最重要的工具是Windows Driver Kit(WDK),它包含了用于驱动开发的各种工具和库文件。
我们可以从微软官方网站上下载并安装最新版本的WDK。
接下来,我们需要熟悉驱动程序的基本概念。
在Windows中,驱动程序可以分为内核驱动和用户模式驱动。
内核驱动运行在操作系统的内核空间,具有更高的权限和更广泛的硬件访问能力;而用户模式驱动则运行在用户空间,通过系统调用与内核驱动进行通信。
我们需要了解如何编写和编译这两种类型的驱动程序,并了解它们的工作原理和特点。
在编写驱动程序之前,我们还需要了解一些基本的Windows内核编程概念,例如驱动对象模型(Driver Object Model)、设备对象模型(Device Object Model)和驱动程序接口(Driver Interface)。
这些概念是驱动程序的基础,对于理解和设计驱动程序非常重要。
接下来,我们将介绍如何使用WDK的工具和库文件来编写驱动程序。
我们可以使用Visual Studio编写驱动程序的源代码,并使用WDK的编译工具将源代码编译成驱动程序二进制文件。
在编译过程中,我们需要配置驱动程序的环境和依赖项,并确保编译成功。
在编写和编译驱动程序之后,我们需要进行驱动程序的调试和部署。
对于驱动程序的调试,我们可以使用WDK提供的调试工具和技术,例如Kernel-Mode Debugging和WinDbg。
对于驱动程序的部署,我们需要将驱动程序二进制文件和相关的配置文件复制到操作系统的指定目录,并注册驱动程序的信息到操作系统的驱动程序数据库。
编译linux外部驱动模块时的基础知识

编译linux外部驱动模块时的基础知识linux内核模块编译引言为了清晰的编译Linux内核,内核编译系统使用Kbuild规则对编译的过程以及依赖进行规约。
在内核模块的编译中,为了保持与内核源码的兼容以及传递编译链接选项给GCC,也使用Kbuild规则。
内核模块的源代码可以在内核源码树中,也可以在内核源码树外,当使用Kbuild时,两种情况的编译方式也大致相似。
一般的内核模块在开发时,都是放在源码树外的。
本文主要是针对源码树外部的内核模块的编译。
为了屏蔽内核模块编译的复杂性,开发人员需要编写额外的Makefile,最终让编译内核模块就像编译普通的应用程序一样,敲入”make”就行了。
本文后面就给了一个实例。
编译外部模块在编译外部模块之前,需要首先准备好当前内核的配置以及内核头文件,同时,当前内核的modules enable选项应该开启(编译内核时指定)。
命令行选项使用如下命令编译外部模块:make –C <kernerl_src_dir> M=<ext_module_path>其中-C表明make要调用<kernel_src_dir>下的Makefile,该Makefile就是内核的Makefile,M为该Makefile的参数,指定外部模块源码的路径。
当Makefile接收到M参数时,就默认编译外部模块。
例如,当前目录下存放一个外部模块的源码,其编译命令如下:make –C /lib/modules/`uname -r`/build M=`pwd`其中uname –r获取当前运行内核的版本,pwd为当前源码路径,将其展开之后为:make –C /lib/modules/ 2.6.42.9/build M=/home/user/hello其中/lib/modules/ 2.6.42.9/build是指向内核源码目录的符号链接。
编译完成之后,要安装驱动时,调用如下命令:make –C /lib/modules/`uname -r`/build M=`pwd` modules_install编译目标modules编译外部模块,默认目标就是modulesmodules_install安装编译成功了的外部模块,默认的安装目录为/lib/modules/<kernel_release>/extra/,前缀可以同过INSTALL_MOD_PATH指定。
如何编译framework

如何编译framework在软件开发中,framework是指一种特定的软件架构,它提供了一套通用的解决方案和工具,以便开发人员能够快速构建和实现特定类型的应用程序。
编译一个framework是将源代码转换为可执行的二进制文件的过程,以便其他开发人员可以在自己的项目中使用它。
编译一个framework需要经过以下几个步骤:1. 确定编译环境:在编译framework之前,首先需要确定编译的环境,包括操作系统、编程语言和开发工具等。
不同的环境可能需要不同的编译方法和工具。
2. 准备源代码:源代码是编译framework的基础,它包含了实现功能的各种类、函数和数据结构等。
在准备源代码时,需要确保代码的正确性和完整性,避免出现编译错误和逻辑错误。
3. 配置编译选项:在编译framework之前,需要配置一些编译选项,例如编译器、编译参数和链接选项等。
这些选项可以根据具体的需求进行调整,以优化编译的效果和性能。
4. 运行编译命令:一旦完成了编译环境的准备和编译选项的配置,就可以运行编译命令来编译framework了。
编译命令可以是一个脚本文件或者是一个命令行指令,它告诉编译器如何处理源代码并生成可执行的二进制文件。
5. 检查编译结果:编译完成后,需要对编译结果进行检查,以确保生成的framework符合预期的要求。
检查的内容包括编译错误、警告信息和生成的二进制文件等。
6. 集成和测试:一旦编译通过并生成了可执行的二进制文件,就可以将framework集成到其他项目中进行测试和使用了。
在集成和测试过程中,需要确保framework的正确性、稳定性和性能。
编译一个framework是一个复杂而细致的过程,需要开发人员具备扎实的编程技术和丰富的经验。
在编译过程中,开发人员需要注意以下几点:1. 代码质量:编译的结果取决于源代码的质量,因此在编写代码时需要遵循良好的编程规范和设计原则,以确保代码的可读性、可维护性和可扩展性。
Windows驱动编程入门

Windows驱动编程入门1前言我经常在网上遇到心如火燎的提问者。
他们碰到很多工作中的技术问题,是关于驱动开发的。
其实绝大部分他们碰到的―巨大困难‖是被老牛们看成初级得不能再初级的问题。
比如经常有人定义一个空的UNICODE_STRING,然后往里面拷贝字符串。
结果无论如何都是蓝屏。
也有人在堆栈中定义一个局部SPIN_LOCK,作为下面的同步用——这样用显然没有任何意义。
我无法一一回答这些问题:因为往往要耐心的看他们的代码,才能很不容易的发现这些错误。
而且我又不是总是空闲的,可以无休止的去帮网友阅读代码和查找初级错误。
但是归根结底,这些问题的出现,是因为现在写驱动的同行越来越多,但是做驱动开发又没有比较基础的,容易读懂的资料。
为此我决定从今天开始连载一篇超级入门级的教程,来解决那些最基本的开发问题。
老牛们就请无视这篇教程,一笑而过了。
Windows驱动编程基础教程(1.1-1.3)1.1 使用字符串结构常常使用传统C语言的程序员比较喜欢用如下的方法定义和使用字符串:char *str = { ―my first string‖ };// ansi字符串wchar_t *wstr = { L‖my first string‖ };// unicode字符串size_t len = strlen(str); // ansi字符串求长度size_t wlen = wcslen(wstr); // unicode字符串求长度printf(―%s %ws %d %d‖,str,wstr,len,wlen);// 打印两种字符串但是实际上这种字符串相当的不安全。
很容易导致缓冲溢出漏洞。
这是因为没有任何地方确切的表明一个字符串的长度。
仅仅用一个‘\0‘字符来标明这个字符串的结束。
一旦碰到根本就没有空结束的字符串(可能是攻击者恶意的输入、或者是编程错误导致的意外),程序就可能陷入崩溃。
使用高级C++特性的编码者则容易忽略这个问题。
linux中编译驱动的方法

linux中编译驱动的方法
在Linux中编译驱动的方法通常涉及以下步骤:
1. 编写驱动代码:首先,您需要编写适用于Linux内核的驱动代码。
这通常是在内核源代码树之外编写的。
驱动代码通常以C语言编写,并遵循内核编程约定。
2. 获取内核源代码:为了编译驱动,您需要获得Linux内核的源代码。
您可以从Linux官方网站或镜像站点下载内核源代码。
3. 配置内核:在编译驱动之前,您需要配置内核以包含您的驱动。
这可以通过运行`make menuconfig`命令来完成。
在配置菜单中,您可以选择要编译的驱动以及相关的内核选项。
4. 编译驱动:一旦您配置了内核并选择了要编译的驱动,您可以使用`make`命令来编译驱动。
这将在内核源代码目录下生成可执行文件或模块文件。
5. 加载和测试驱动:一旦驱动被编译,您可以将其加载到Linux 内核中以进行测试。
您可以使用`insmod`命令将模块加载到内核,然后使用`dmesg`命令检查内核日志以查看驱动是否正确加载。
这些是基本的步骤,但具体的步骤可能会因您的环境和需求而有所不同。
在编译和加载驱动时,请确保您具有适当的权限和知识,因为这可能需要管理员权限,并且错误的操作可能会导致系统不稳定或损坏。
驱动学习1:第一个驱动入门

驱动学习1:第⼀个驱动⼊门Linux驱动程序,⾸先应该知道它是linux的内核模块。
Linux内核模块是使得复杂⽽庞⼤的linux内核条理清晰、可裁剪、⾼兼容性的重要特性。
Linux内核模块的特点:1,模块本⾝不被编译进内核镜像,能够控制内核的⼤⼩。
2,模块可以在需要的时候中被动态加载,⼀旦加载完成就和内核其它部分完全⼀样。
下⾯便是linux内核模块的helloworld程序,结构⼗分固定。
(1) 模块加载函数当通过insmod或者modprobe命令加载内核模块时,模块的加载函数会⾃动执⾏,完成本模块的相关初始化⼯作(2) 模块卸载函数当通过rmmod命令卸载内核模块时,模块的卸载函数会⾃动执⾏,完成本模块的卸载功能(3) 模块许可证声明如果不声明LICENSE,模块被加载时,将收到内核被污染(Kernel Tainted)的警告。
(4) 模块参数(可选)模块参数是模块被加载的时候可以传递给它的值,它本⾝对应模块内部的全部变量(5) 模块导出符号(可选)内核模块可以导出的符号(symbol,对应函数或变量),若导出,则其他模块可以使⽤本模块中的变量或函数(6) 模块作者等信息声明(可选)这个驱动并不具有任何控制硬件的⾏为,只是为了展⽰linux驱动的通⽤结构。
这⼏乎是所有驱动程序的通⽤模版,如led的驱动程序,只需要在hello_ioctl函数中根据不同的传⼊参数操作gpio寄存器即可。
(应⽤层没有操作硬件的权限,⽽内核中具有所有权限。
驱动程序的作⽤就是⾼效的、封装的、有限的向应⽤层提供服务)代码:1/*2hello.c - The simplest kernel module.3*/4 #include <linux/kernel.h>5 #include <linux/init.h>6 #include <linux/module.h>7 #include <linux/slab.h>8 #include <linux/io.h>9 #include <linux/interrupt.h>1011 #include <linux/of_address.h>12 #include <linux/of_device.h>13 #include <linux/of_platform.h>1415/* Standard module information */16 MODULE_LICENSE("GPL");17 MODULE_AUTHOR("pp.");18 MODULE_DESCRIPTION("hello module template ");1920#define DRIVER_NAME "hello"2122 unsigned myint = 0xdeadbeef;23char *mystr = "default";2425 module_param(myint, int, S_IRUGO);26 module_param(mystr, charp, S_IRUGO);2728static int __init hello_init(void)29 {30 printk(KERN_INFO "Hello module world.\n");31 printk(KERN_INFO "Module parameters were (0x%08x) and \"%s\"\n", myint,mystr);3233return0;34 }353637static void __exit hello_exit(void)38 {39 printk(KERN_ALERT "Goodbye module world.\n");40 }4142 module_init(hello_init);43 module_exit(hello_exit);编译后⽣成.ko⽂件,移植到开发板linux下测试默认情况下root@plnx_arm:/mnt# insmod hello.koHello module world.Module parameters were (0xdeadbeef) and "default"root@plnx_arm:/mnt# lsmodTainted: Ghello 8170 - Live 0xbf004000 (O)root@plnx_arm:/mnt# rmmod helloGoodbye module world.传⼊参数时:root@plnx_arm:/mnt# insmod hello.ko myint=123 mystr="pp"Hello module world.Module parameters were (0x0000007b) and "pp"root@plnx_arm:/mnt# rmmod helloGoodbye module world.通过其他的查询命令可以看到内核的输出:root@plnx_arm:/mnt# ls /sys/module/hello/parameters/myint mystrroot@plnx_arm:/mnt# tail -n 2 /var/log/messagesJun 409:56:33 plnx_arm kernel: Hello module world.Jun 409:56:33 plnx_arm kernel: Module parameters were (0x0000007b) and "pp"在Linux下可以通过两种⽅式加载驱动程序:静态加载和动态加载。
kernel 驱动模块编译

kernel 驱动模块编译
内核驱动模块的编译通常涉及到以下步骤:
1. 编写驱动代码:首先,你需要编写内核驱动的源代码。
这通常是用C语言编写的,因为内核是用C语言编写的。
2. 配置内核:为了使你的驱动能够被编译进内核,你需要在内核配置中启用相关的配置选项。
你可以使用 `make menuconfig` 命令来配置内核。
在配置界面中,找到你的驱动相关的配置选项,并启用它们。
3. 编译内核:配置完内核后,你需要编译内核。
你可以使用 `make` 命令来编译内核。
这将会生成一个内核映像文件(通常是 `vmlinuz`),以及一个初始RAM磁盘(通常是 ``)。
4. 编译驱动模块:接下来,你需要编译驱动模块。
驱动模块是动态加载到内核中的代码。
你可以使用 `make modules` 命令来编译驱动模块。
这将会生成一个或多个驱动模块文件(通常是 `.ko` 文件)。
5. 加载驱动模块:最后,你可以将驱动模块加载到内核中,以便在系统运行时使用。
你可以使用 `insmod` 命令来加载驱动模块。
例如,`insmod ` 将会加载名为 `` 的驱动模块。
请注意,编译和加载内核驱动需要具有相应的权限。
通常,你需要以 root 用户身份执行这些命令。
此外,如果你在生产环境中使用内核驱动,请确保你了解相关的安全风险,并采取适当的安全措施。
Linux驱动编译与运行

linux驱动编译与运行前两天看了按键的源代码,知道了写驱动的框架,今天写怎么编到内核里。
Makefile 就不写出来了,用的是<linux设备驱动程序>那本书里的那个makefile(是不是通用的?好像随便写个驱动都可以用它来编译)。
编译出来的文件是key_test.ko。
一、手工加载测试1、insmod ./key_test.ko 加载驱动模块到内核2、cat /proc/modules |grep key_test 查看key_test模块在内核中的地址,不加过滤器可以看到全部加载的模块。
3、lsmod 显示模块,这时可以看到所有的模块名字,后面跟的是主设备号和次设备号。
4、rmmod key_test 把模块从内核里卸载。
二、动态加载1、把key_test.c源代码放到内核源代码的/drives/char/下,因为这是属字符型驱动,放在这编译到zImage中。
2、这时我们make menuconfig 编译内核是看不到key_test这个选项的。
我们把这个选项写到菜单里面才行。
在内核源代码的/drives/char/下有一个Kconfig文件,打开(1) vi Kconfig 加几行到里面:config ConFig_key_testbool "key test" //前面那个bool换成tristate就是支持模块化编译上面句是在make menuconfig时会出现key test这个选项在drive/char子菜单下,bool前面是TAB键------help---------- 这句是出现在菜单选项下面的This key test help. 这句是你的驱动的说明会出现在help里面(2)在/drivers/char目录下的Makefile文件里加上一句:obj-$(CONFIG_key_test) += key_test.o上面这句是让Make时把key_test编译到内核中.(3) make menuconfig 把key_test选项选取上(4) make zImage生成zImage文件,重启动加载这个新编的内核。
linux下驱动模块编译步骤

linux下驱动模块编译步骤本⽂将直接了当的带你进⼊linux的模块编译。
当然在介绍的过程当中,我也会添加⼀些必要的注释,以便初学者能够看懂。
之所以要写这篇⽂章,主要是因为从书本上学的话,可能要花更长的时间才能学会整个过程,因为看书的话是⼀个学习过程,⽽我这篇⽂章更像是⼀个培训。
所以实践性和总结性更强。
通过本⽂你将会学到编译⼀个模块和模块makefile的基本知识。
以及加载(卸载)模块,查看系统消息的⼀些知识;声明:本⽂为初学者所写,如果你已经是⼀个linux模块编译⾼⼿,还请指正我⽂章中的错误和不⾜,谢谢第⼀步:准备源代码⾸先我们还是要来编写⼀个符合linux格式的模块⽂件,这样我们才能开始我们的模块编译。
假设我们有⼀个源⽂件mymod.c。
它的源码如下:mymodules.c1. #include2. #include3. #include45. MODULE_AUTHOR("Yu Qiang");6. MODULE_LICENSE("GPL");78. static int nbr = 10;9. module_param(nbr, int, S_IRUGO);10.11. static int __init yuer_init(void)12.{13. int i;14. for(i=0; i15. {16. printk(KERN_ALERT "Hello, How are you. %d/n", i);17. }18. return 0;19.}20.21.static void __exit yuer_exit(void)22.{23. printk(KERN_ALERT"I come from yuer's module, I have been unlad./n");24.}25.26. module_init(yuer_init);27. module_exit(yuer_exit);我们的源⽂件就准备的差不多了,这就是⼀个linux下的模块的基本结构。
Linux驱动开发学习的一些必要步骤

Linux驱动开发学习的一些必要步骤5. 写一完整驱动,加上read,write,ioctl,polling等各种函数的驱动实现。
在ioctl里完成从用户空间向内核空间传递结构体的实现。
6. 写一block驱动,加上read,write,ioctl,poll等各种函数实现。
7. 简单学习下内存管理,这个是最难的,明白各种memory alloc的函数实现细节。
这是Linux开发的基本功。
8. 学习锁机制的应用,这个不是最难的但是最容易犯错的,涉及到很多同步和并发的问题。
9. 看内核中实际应用的驱动代码。
你会发现最基本的你已经知道了,大的框架都是一样的,无非是read,write,ioctl等函数的实现,但里面包含了很多很多细小的实现细节是之前不知道的。
这时候就要考虑到很多别的问题而不仅仅是基本功能的实现。
推荐您看中integrated的一个驱动kvm,记得是在driver/lguest下,很好玩的,就是Linux 下的虚拟机驱动,代码不长,但功能强大。
有能力的可以自己写一操作系统按照要求做成磁盘镜像加载到虚拟机中,然后客户机可以有自己的4G虚拟地址空间。
10. 看完驱动欢迎您进入Linux kernel学习中来。
最简单的方法,跟着ldd(Linux devive driver)做一遍。
1、Makefile 是如何编写eg:# 这是上面那个程序的Makefile 文件 1main:main.o mytool1.o mytool2.o 2gcc -o main main.o mytool1.o mytool2.o 3main.o:main.c mytool1.h mytool2.h 4gcc -c main.c 5mytool1.o:mytool1.c mytool1.h 6gcc -c mytool1.c 7mytool2.o:mytool2.c mytool2.h 89分析:在Makefile 中也#开始的行都是注释行.Makefile 中最重要的是描述文件的依赖关系的说明.一般的格式是:Linux 操作系统C 语言编程入门target:components //表示的是依赖关系TAB rule //规则mytool1.o mytool2.o 当倚赖的对象在目标修改后修改的话,就要去执行规则一行所指定的命令.就象我们的上面那个Makefile 第3行所说的一样要执行gcc -o main main.o mytool1.o mytool2.o(注意规则一行中的TAB表示那里是一个TAB 键)Makefile 有三个非常有用的变量.分别是$@,$^,$<代表的意义分别是:$@--目标文件;$^--所有的依赖文件;$<--第一个依赖文件。
cmake 驱动编译

cmake 驱动编译(最新版)目录1.CMake 简介2.CMake 的驱动编译3.驱动编译的流程4.常见问题与解决方法正文1.CMake 简介CMake 是一个跨平台的构建系统,可以用来构建 C、C++和 Fortran 等语言的软件。
CMake 能够自动检测操作系统和编译器,根据不同的平台生成相应的构建文件,从而简化了软件的编译和构建过程。
2.CMake 的驱动编译CMake 的驱动编译是指在 CMake 中使用特定语言编写的驱动程序,以便将其编译为可执行文件。
在驱动编译过程中,CMake 会自动处理驱动程序的依赖关系,并生成相应的构建文件。
3.驱动编译的流程驱动编译的流程主要包括以下几个步骤:(1)创建 CMakeLists.txt 文件:在项目根目录下创建一个名为CMakeLists.txt 的文件,该文件将包含项目的构建规则和依赖关系。
(2)初始化 CMake:在终端中运行 cmake 命令,指定项目根目录,CMake 将自动生成一个构建文件。
(3)配置 CMake:根据项目需求,对 CMake 进行配置。
例如,可以设置编译器、链接器和库文件等。
(4)生成 Makefile:根据 CMake 生成的构建文件,生成相应的Makefile。
(5)编译驱动程序:使用 make 命令编译驱动程序,生成可执行文件。
4.常见问题与解决方法在驱动编译过程中,可能会遇到一些常见问题,如下所示:(1)找不到依赖库:如果驱动程序依赖于某个库文件,但该库文件未安装或未链接,则可能导致编译失败。
解决方法是安装相应的库文件,并在 CMake 中设置链接库。
(2)编译器不兼容:如果驱动程序使用了特定编译器特性,但在目标平台上不支持该特性,则可能导致编译失败。
解决方法是更改编译器或调整驱动程序的源代码。
(3)链接器配置错误:如果链接器配置不正确,可能导致可执行文件无法正常运行。
解决方法是检查 CMakeLists.txt 中的链接器配置,并确保链接器正确地链接了库文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.添加代码文件。添加新项,选择源程序代码文件,不过,这里一般用C文件,至于原因,我不想多解释,现在只是一个简单的代码,所以,我都在一个文件里面写完。就是把我刚才在上面的代码复制到你刚新建的源文件里就行了。
3.设置编译选项。还记得安装了WDK吧,既然如果,就要用到它了,再说了,以前还没用到过#include <wdm.h>之类的语句吧?好了,在附加包含路径设置成WDK中的inc路径,一般如下,
unsigned int nIndex;//一个计数器,循环的时候可以用到
DbgPrint("Example1: Driver entry is called.\n");
//__try{
//初始化两个Unicodestring
RtlInitUnicodeString(&usDevName,L"\\Device\\Example1");
一、生产工具:
首先,得准备好微软的驱动开发包,我这里用的是WDK(Windows Driver Kit)6001,因为它里面的编译环境我不会用,所以,我选用了集成环境,这里我使用的VS2008.这两个工具在网上都有下,至于下载和安装,都是你自己的事情了。
二、开工了:
还记得我们当初第一次写C程序吗?每一个C程序都有一个必须的东西,即main主函数,它是程序执行的起点,后来我们熟悉了,我们会在编译器编译的时候指定另一个函数入口为主函数起点。这里所要说的驱动程序也是有一个类似的入口,一般我们都会把这个名字叫 DriverEntry,和一般的C程序一样,这个函数入口也可以设置成为另外一个名字,如果是在命令行的话,给个参数 -entry: NewEntryName即可,后面的部分,我们可以在VS里面设置这个入口。
//接下来,我再安装一个卸载例程,从而,使我们的驱动可以动态的卸载,这就是传说中的 //热插拨
pDrvObj->DriverUnload = Example1Unload;
//把创建的设备保存起来吧,否则以后便不能引用啦
pDrvObj->DeviceObject = pDevObj;
//如果出现一般的异常,执行流程会走到这儿来,除了一些SEH都解决不了的异常除外,这个我们以 //后再讨论
//}
return status;//
}
至此,一个简单的设备驱动程序框架已经完成了,难道不是吗?在这个驱动里面,我们创建的设备\Device\Example1,这里,Device是设备对象的所属名字空间,Example1才是它的名字。事实上,它只是一个需拟设备驱动程序,并没有一个实际的设备与之相对应。
{
NTSTATUS status = STATUS_UNSUCCESSFUL;//初始化为不成功
UNICODE_STRING usDevName;//我们的设备名
UNICODE_STRING usDosDevName;//Dos符号链接
PDEVICE_OBJECT pDevObj = NULL;//设备对象
//只有成功创建设备我们才有必要继续
if(NT_SUCCESS(status)){//测试成功与否一般用这个宏,而不是让它直接与STATUS_SUCCESS比 //较,查看一下这个宏定义就知道了
//成功创建设备之后,我们要作的一件事就是初使化驱动的IRP例程,现在,我们的驱动什么 都不干,所以,每个例程也还是什么都不做
我们就以DriverEntUS DriverEntry(PDEVICE_OBJECT pDrvObj,PUNICODE_STRING pRegPath)
第一个参数是驱动模块对象,由操作系统内核分配好传来,以我的理解吧,就和我们的Win32应用程序的第一个参数HINSTANCE一样,第二个参数是操作系统传来的驱动在注册表中路径。和以前的main函数一样,DriverEntry函数也是做一些初始化的工作,下面一起来看看一个基本的最简单的驱动程序框架。
4.链接先项。现在的设置的话,生成的文件还是exe后缀呢,但驱动都是sys后缀,所以,你得改,在什么地方改,我不说了。另外,得添加一个输入库,就是附加依赖项:ntoskrnl.lib这个时候,又得设置附加库目录了,设置成 WDKROOT\lib\wxp\i386
别忘了,我们现在的工程还是个console项目呢,得改,找到链接选项卡,System(子系统)一项选择Native,还有驱动选/Driver.
一般的Windows应用程序在主入口函数完成相关的初始化工作以后,就开始一个消息循环,进行消息处理。驱动程序也有点像像了,驱动程序在主入口函数中完成相关的初始化之后便处于睡眠状态,开始等待外围请求。驱动程序的主要消息都被Windows打包成IRP包,相关的知识如果你都还DKROOT\inc\api
WDKROOT\inc\crt
WDKROOT\inc\ddk
另外,同于驱动是接近硬件的程序,它可以执行绝大多数CPU指令,从而,我们还得为我们的驱动程序指定目标CPU平台,这里,我选X86.需要在预定义里定义添加一个_X86_的定义,否则会收到一个需要指定目标平台(target architecture)的编译错误。
RtlInitUnicodeString(&usDosDevName,L"\\DosDevices\\Example1");
//现在我们创建设备
status = IoCreateDevice(pDrvObj,0,&usDevName,FILE_DEVICE_UNKNOWN,
FILE_DEVICE_SECURE_OPEN,FALSE,&pDevObj);
//我们的驱动便是被卸载了
IoDeleteDevice(pDrvObj->DeviceObject);
//OK,所有的事情已经解决
}
NTSTATUS Example1IrpRoutine(PDRIVER_OBJECT pDev,PIRP pIrp)
{
//在调试器中输出一个字符串,你还记得Win32下的TRACE系列宏吗
5.OK,现在试着生成一下吧。如果没有语法错误的话,它还是会有一大堆错误的,好,我当初写的时候也是这样,那,我现在把所有的设置一股脑告诉你,你就别走弯路了,遇到其它别的问题再说,主要精力别放在这儿就行了。
①C/C++->Preprocessor: Ignor Standard include path YES
void Example1Unload(PDRIVER_OBJECT pDrvObj)
{
UNICODE_STRING usDosDevName;//Dos符号链接
DbgPrint("Example1: Driver is being unloaded.\n");
//首先我们要删除的是一个Dos链接名,否则,这个链接名便不再可用,直到系统重启
IoDeleteDevice(pDevObj);//删除创建的设备对象
//这个时候,status肯定就代表失败了,如果入口函数返回一个失败的状态,系统会自动把 //创建的这个Driver删除的,我们不用担心
}
}
//现在,我们测试一下成功与否
//}__except(EXCEPTION_EXECUTE_HANDLER){
四.启动驱动程序。
把生成的example1.sys复制到一个地方,我这里是C:\然后,使用以下程序加载程序加载驱动:
int _cdecl main(void)
{
HANDLE hSCManager;
HANDLE hService;
②C/C++->Code generation: Basic Runtime Check Default; Buffer security check No(GS-)
③C/C++->Advanced: Calling convertion __stdcall(/Gz)
③Linker->Input: Ignor All default libraries YES
DbgPrint("An driver routine is called.\n");
return STATUS_SUCCESS;//简单地返回成功而已
}
//驱动入口函数
NTSTATUS DriverEntry(PDRIVER_OBJECT pDrvObj,PUNICODE_STRING pUsRegPath)
//每个设备最多有IRP_MJ_MAXIMUM_FUNCTION个IRP例程,现在,我们都把它们初始 //化成一个相同的入口
for(nIndex=0;nIndex<IRP_MJ_MAXIMUM_FUNCTION;++nIndex)
pDrvObj->MajorFunction[nIndex] = Example1IrpRoutine;
④linker->Manifest file: Generate manifest No
⑤Linker->Advaced: Entry point DriverEntry; Base address 0x100000; Ramdomized base address Default; Data execution prevention Default;
//不过,这个Dos链接名应该和我们在DriverEntry里创建的一样,千万记得了
RtlInitUnicodeString(&usDosDevName,L"\\DosDevices\\Example1");