位移测量系统设计
基于红外激光光源的远距离微小位移测试系统设计

信 息 科 技4科技资讯 SCIENCE & TECHNOLOGY INFORMATIONDOI:10.16661/ki.1672-3791.2018.01.004基于红外激光光源的远距离微小位移测试系统设计韩伟 黄文浩 刘涌 高震宇(北京电子科技职业学院 北京 100176)摘 要:本文以建筑物结构沉降监测为应用背景,采用计算机视觉测量技术,精度高、非接触,适时监测,智能化,组网传输,实现远程监控量测,开发出一种远距离非接触式多测量点的微小位移监测系统,对三维微小位移测量方法进行研究,广泛应用于建筑物形变量检测,通过对比不同时间点的形变值和沉降值,累计产生的位移量曲线变化来判断建筑物整体稳定的变化趋势。
本课题研究并提出的基于计算机视觉的远距离微小位移检测方法,弥补了传统检测方法的不足,为实际工程问题的解决提供了一种新的思路。
关键词:非接触 微小位移 监测系统中图分类号:G64 文献标识码:A 文章编号:1672-3791(2018)01(a)-0004-02建筑物的结构动态位移信息是在建筑施工和使用中极其有价值的原始数据,对建筑物的安全保障、维护有着极其重要的意义。
传统的多种位移监测方法多为人工测量方法,在实际中有很大的局限性。
本文提出了一种基于计算机视频技术的远距离微小位移检测方法。
以建筑物建设过程和建设后的沉降监测为应用背景,开发出了基于红外激光光源的远距离非接触式建筑物沉降和倾斜的微小位移测量监测系统。
1 设计构思基于红外激光光源的远距离微小位移测试系统设计如下。
1.1 系统设计要求(1)实现视频测量点的监测位移收敛,在30m远的距离,测量点的面内微小位移测量精度达到1mm。
(2)数据处理、传输、曲线显示和报警信息发布功能。
1.2 系统设计内容和步骤(1)标志点的设计:设计精确的靶型标志点,实现测量标识和标定功能的统一。
(2)研究光的变化对目标物的影响:根据检测现场复杂的背景环境,设计能够增强目标物在图片中效果的照明系统。
基于PSD的微小位移测量系统的设计

大作用 , 将动点 P的微小 位移d 转换为夹 角 p 的变化放 大 , 动镜 运动前 后的出射 光的 出射角分别 为 0 0+ ( ) 从 而将 和 2 n 1 p。
微小的位移d 放大为光点在位置敏感探测器 (S 上的位移D P D) ,
实现微小位移 的测量 。 系统 采用数字信号处理器 (ii l i a Dgt g l aSn Poe i ) rcsn 来处理接收到的位置信号 , sg 运用算法根据 p, , , D L H, n 之 间的数学 关系反 向推导得 微小位移 d 来到达对d 和d , 的实 时 准确测量【 其检 测光路原理如 图 l 。 所示 :
K y r s p s insn iV ;ee t nP D) e l i tc;M S 2 L 2 0 Adfee c ;h n e p t e wod : o io ; s ied tci ( S ; a— meDee t t e t o r t T 3 0 F 4 7 i rn ec a n ln u f i
要求很高, 系统受环境的影响非常大, 很难在工作环境复杂的生产 线上运行。 为此可以利用光学测量来减小环境的影响 , 用光线多
次反射法来将 微小的位移放大 , 从而用低精度探测-P D 来完成  ̄ S, r 图1 光路原理 图
高精度的测量【 2 J o
2 测 量原 理
在此微小位移的检测 系统 中, 激光束 以 0 角入射到参考平 面镜后反射到动镜上 , 经过来 回多次反射后 , 出射激光束入射到 与参 考平面镜平行放置 , 距离为 H的位 置敏 感探 测器 (S 上 。 P D)
1 引言
在微小位移 测量 系统 中, 传统 的测量 方法是采用接触 式的 机械测量 , 此种 方法精 度不高 , 受机械加工精度 的制约很大 , 并 且属于间断式测量 , 不适于在 自动化生产线上的实时检测 。 以 所 现在对于这种检测方式一般 是采用非接触式 的测量 ,即光学测 量 。在光学 测量 中接受 信号 的常用器件 有两种 ,分别为 C D C (h reC ul ei ) S (oio esi e c o ) C ag o p dD vc 和P DP s nSni eD t tn。 e e i f t v ei 在工业生产 中的应用越来越成熟 [ 然而采用一般的测量 方法为 1 ] 。 了 使其精度达到纳米量级 , 系统非常复杂 , 目 并 . 测仪器的精度 对探
基于DSP的激光一维动态位移测量系统设计

Ab tac : I t sp pe , t incp eo n s r t n hi a r hepr il fo e— dm e ina a e na i s a e e e s r m e y tm sdic s d. a d i nso lls rdy m cdiplc m ntm a u e nts se i s use n t e  ̄ h m e o ne— di e so lls rdy m i e ur m e t s t m s d on DSP s as nto uc d. he e t r h e fo m n ina a e na c m as e n  ̄ e ba e i lo i r d e r he ha dwa e cr u t r ic i
dy a i ipa e e tm e s e e ti e l e n m c ds lc m n a ur m n sr ai d. z Ke r s: DS ; s ra o t ds l e e tm e s r m e y wo d P e lp r ; ipac m n a u e nt i
维普资讯
计 算 机 测 量 与 控 制 . 0 2. 0 9 20 1()
・
57 ・ 6
文 章 编 号பைடு நூலகம்:6 1—4 9 (0 2 0 17 5 8 2 0 )9—0 6 —0 57 3
中 图 分 类 号 : P 3 . T 344
文献 标 识 码 : B
三维光栅位移测量系统的硬件设计与实现
ห้องสมุดไป่ตู้
di s pl ac e me nt me aS Ur e m e nt s y s t e m
LI S h e n — d e ,ZHANG Xi a ng . 1 . i,TAO . Ha n 。 W EI L i . k a i 。
,
( 1 . S c h o o l o f I n f o r ma t i o n a n d C o mmu n i c a t i o n , Gn il i n U n i v e r s i t y o f E l e c t r o ic n T e c h n o l o g y , G il n i n 5 4 1 0 0 4, C h i n a ;
r e a l — t i me , a n d i mp r o v e t h e p r o c e s s i n g p r e c i s i o n o f w o r k p i e c e , a 3 D g r a t i n g d i s p l a c e me n t me a s u r e me n t s y s t e m wi t h h i g h - p r e c i s i o n b a s e d o n g r a t i n g d i s p l a c e me n t s e n s o r i s r e s e a r c h e d nd a d e s i g n e d . Me a s u r e me n t p i r n c i p l e o f ra g t i n g d i s p l a c e me n t s e n s o r i s a n a l y z e d .Ha r d wa r e d e s i g n o f t h i s s y s t e m i s i n t r o d u c e d .S u b d i v i s i o n a n d d i r e c t i o n d i s c i r mi n a t i o n e u i c u i t o f g r a t i n g d i s p l a c e me n t s i g n a l , ma i n c o n t r o l c i r c u i t ,d i s p l a y c i r c u i t a n d c o n t r o l c i r c u i t a r e d e s i g n e d .C i r c u i t s a mp l e b o a r d o f t h e s y s t e m i s ma d e .E x p e ime r n t a l s y s t e m i s b u l i t a n d e x p e i r me n t s a r e c o n d u c t e d . E x p e r i me n t a l r e s u l t s s h o w t h a t t h e h a r d wa r e c i r c u i t w o r k s p r o p e r l y, t h e s y s t e m o p e r a t e s s t a b l y a n d me a s u r e s a c c u r a t e l y , a n d c a n me e t p r o d u c t i o n d e ma n d o f h i g h — p r e c i s i o n me a s u r e me n t f o r ma c h i n e t o o 1 . Ke y wo r d s :d i s p l a c e me n t s e n s o r ; 3 D ra g t i n g ;d i s p l a c e me n t me a s u r e me n t s y s t e m;h a r d w a r e d e s i g n
位移测量系统的设计
在控制领域中,经常需要进行各种位移量的测在实际的工业位置控制领域中,为了提高控制精度,准确地对控制对象进行检测足十分艰要的。
传统的机械测量位移装S L L远远不能满足现代生产的辦要,而数字式传感器光电编码器, 能将角位移量转换为勾之对应的电脉冲输出,;1:要用于机械位置和旋转速度的检测,具冇精度高,体积小等特点,冈此木设计决定采用光电编码器进行位移检测,本设计为采用光屯编码器来实现位移测请及《仿真,实现测锖來f〗外部的不冋的位移值及显& A•体应用AT89C51中。
片机为核心,光电编码器进行位移测量,同时以LCD液品显示模块显示。
木设计采用的光电编码器输出电H(为5V, 输出倍y经四倍频电路处现后送入巾片机进行计数处理,量后送入LCD模块量示。
木文从位移测量原理入手,详细阐述了位移测#系统的:丨:作过程,以及硬件电路的设计、V。
示效果2木文吸收了硬件软件化的怨想,实现了题丨丨要求的功能。
关键词:位移测蛍,光电编码器,单片机,LCD显示模块AbstractIn ihe control field, a variety of displace量ent 量easure量ents often need lo be carried out。
In actual industry position control do量ain, to increase the control precision, carries on the exa量ination to the controlled 量e量ber is accurately very i量portant。
The traditional 量achinery survey displace量ent installs has not been able 10 satisfy the 量ode量 production by far the need, but the digital sensor electro-optic encoder, can iransl'or量 ihe angular displace量ent into with it correspondence electricity pulse output, 量ainly uses in the 量echanical position and the velocity of whirl exa量ination, has the precision to be high, volu量e s量all and so on characteristics, therefore this design decided that uses the electro-optical encoder to carry on the displace量ent to exa量ine。
高精度角位移测量系统设计

1 A 2 8 与 A m g 1 L的通信 设计 - 3 D S3 T ea6
AD S3的 1 输 出 口具 有 3 锁 存 功 能 , 用 28 6位 态 利 EA L N B E和 I HII 号 进 行 锁 存 与 使 能 控 制 , 到 N BT信 得
【 关键词 】 旋转 变压 器 ;D S3T 24N E 3 A 28 ;S 12 16 【 中图分类号 】 T 23 P 7 0 引 言 【 文献标 识码 】 A 【 编号】 10—7X( 1)40 5—2 文章 0 373 2 0 0—0 10 0
一
L Ms t, 0 0 得 至 ^ A n s t ic 贝 鬲 方 no 0: =U _s 0 ir ; M i no
高精度角位移测量系统设计
白 明方 ,杨 瑞峰
( 中北大学 仪器科学与动态测试教育部重点实验室 ,山西 太原 005 ) 3 0 1
【 摘
要 】 采 用双通道 多极旋转 变压 器和 A 2 8 构成的 测角 系统可 以实现 角位 置和角速度 的高精度动 态测 量。 D S3
该 测 角 系统 采 用 单 片机 实现 角位 置 的 动 态监 控 , 用 C L 使 P D完成 了 A 2 8 与 D P 信 的接 口逻 辑 设 计 , 采 用 D P DS3 S通 并 S 实 现 双 通道 角位 置 粗 精耦 合 及 测 速 算 法 。
一
读取粗精通道的 1 位数据, 6 然后进行粗精耦合, 并送 1 2 符液 晶显 示, 为 系统 角位 置 的监 控输 出。 6× 字 作
第 2 卷 第 4 ( 第 16 ) 5 期 总 1期
基于MSP430的位移测量系统的设计
誊 {
^ ̄ v ! - d sr j aI t
系统 上电复位后 ,主程 序开始初始 化各个模块 ;然后读取A D / 采 样值 ,计算V V 、d ,并根据 d 值 值计算实 际位移 。为了使得AD在
I
图2 系统 硬 件 结 构 示 意 图
( ) 1 正弦波发 生电路。常用的 正弦 波发生 电路有下面 的几种 :
3 系 统 软 件 设 计
整个 系统硬件结构如 图2 。本设计利用集 成函数信号发生芯 所示 片MA 08 x 3产生正弦信号 ,然后经放大送入差分运放 、变压 、整流 滤
波后 。根据两路电压改变得到位移值 。
_ l ^ l 咐 ” t t 啊 ^ ^
变 ! I
整个系统 软件如 图5 所示 。
南弘开 效 21 1期 9 o0 年第 0 2
一
基 于MSP 0 4 的位 移 测 量 系统 的设 计 3
程 磊
( 州 大 学 电子 信 息学 院 苏 州 工 业 职 业 技 术 学 院 ) 苏 摘 要 本文介绍一种 以单 片机Ms 4 O P 3 控制为核・ 心,使 用线性 可变差动 变压 器为传 感器,能实现较精确位移 测量功能的位移 测量
< >
。。 。。 。一
* . :I '
。。’。 f ’。。’’一 。 。。
—
— 一一
—!
。 。。。 。。。i。 。。。 一 。 ’
L—
‘ jt
§I
g :
’
L — _ L —— — j ——j — — —
囤5 系统 软 件 漉 程 图
动的杆状磁芯。结构如图 l 所示。 差动变压器 中使用时 ,需要将 自由移 动的磁芯 一端与被测物体相连 ,当被 测物
一种远距离大目标微位移测量系统设计

mie n ci db et nci r t s m ot tomoi rtem codslcm n o l g ud o o j t i t da dr e e yt a se e.I i i p r nt பைடு நூலகம் ir—i ae e t fa eotor be s n t e v h r v n a t o h p r c
Ze g Ha n o, Ya g S z o g, Ca ii n hih n o Haln
( ol efC m u i t nE gnei ,C ogigU i rt,C ogig4 0 3 , hn ) Clg o m n a o nier g hnqn n esy h nqn 00 0 C i e o ci n v i a
关 键词 :微 位移 ; 射 器 ; 发 系 统 反 收 中 图 分 类号 : P 7 T 24 文献 标 识 码 : A 国家 标 准 学科 分 类 代 码 : 6 .0 4 04
Ne mir-i lcme t au e n ytm rlreojc n i a c w cods ae n s rme t s p me s e f g bet nl gds n e o a i o t
Absr c :Th e s r m e ts se c nsss o e ev r。ta mitra e e tr T e wiee sm ir wa e I r n — ta t e m a u e n y tm o it fr c ie rns t nd rf co . h r l s c o v Sta s e l
无线电波信号 。在接收端 , 利用信号反射波相对于 发射信号 的相位 变化 , 以对 室外远距离 大型监测 目标 的微 小位移进 行测 可 量, 这种微位移测量系统可 以用 于山体滑坡和桥梁变形等监测 , 从而预 防 自然灾害发生 。本文 介绍 了微位移 测量 的基本原 理 , 同时给出了反射系统和收发系统设计方法。具体 系统 可以分为模拟和数字 2种不 同体制。
光纤位移测量系统设计

比值 , 就可以计算出传感器与被测物体之间的位移。
— —
程度上减小系统的体积_ 。 2 j
待洲位移
k一
— — — — 参考信号
图 2 光纤位移测 量系统结 构
2 1 光发 射机 .
光 发射 机用 于产 生 载 波 光 信 号 。其 基 本 原 理 是 先 产 生 一个 载波 电信 号 , 借 助 专 门 的 电/ 再 光转 换 器 件 将 电 信
Ab ta t I h sp p r ip a e n a u i g s s e b s d o p ia i r e s r i d sg e .Th s s s e u e h s r c : n t i a e ,a d s lc me t me s rn y tm a e n o t l b es n o s e i n d c f i y tm s s t e CY8 9 4 ir c n r l ra d a o t u lc a n l r c s i g t c n q et k t u h s a lrwh l an a n i h C2 4 6 m c o o to l n d p s d a h n e o e sn e h i u o ma e i m c m l i m i t i s h g e p e e p ro ma c . ef r n e Ke wo d : ip a e n a u i g o tc l i r e s r d a h n e r c s i g y r s d s l c me tme s rn ; p ia b e s n o ; u l a n lp o e sn f c
基于图像测量技术的位移检测系统的设计
最佳匹配点坐标( ) , 与 中心坐标相比, 即可
得 到被 测物运 动方 向及 相对位 移 。
1 系统 总体设 计 . 2
利 用光源 、 镜 、 透 图像传 感器 组成 的“ 摄像 机” 对运 动 物体 连续 不 断地“ 拍照” 图像 传感 获 取被 , 测物 体 的表 面信 息形 成成 帧 的图像 ,并将 其传 输 给相 应 的 DS P数 据处 理单元 , P根 据预 先设 定 DS 的图像 匹配 算法 完成 图像 匹配得 到 微小 的采 样 间
类 。与 C D 产 品相 比 ,C C MOS是 标准 工艺 制程 , 可利 用现 有 的半导体 设 备 , 不需额 外 的投 资设备 , 且 体 积 小 、耗 电量 不 到 C D 的 11 ,售 价 也 比 C /0 C D 便 宜【。另外 ,C C 】 MO S传感 器 的最大 优 势 , 是它 具有 高度 系 统整合 的条件 。理 论上 ,所 有 图
体表面 图像信息 ,再经过 内置 的 DS P处理 器,对采 集的 图像进行匹配运算 ,输 出数字位移信 息,通过 S I P 通信传递 给 A R单片机 ,由 A R单片机 再处理并实时显示输 出。为 了提 高 C V V OMS图像传感器与被测物体表面的距离 ,设置 了外加 激 光源 及光学透 镜组件 ,使 C MS图像传感器与被测物体表面的距离达到 1~ 1c O 0 5 m,并且得到较高 的精度 。系统能够 很好的实现非接 触测 量的 目的。 关键词 :非接触:AD 9 0 ;A NS 50 VR单片机 ;位移检测 中图分类号 :T 3 1 1 文献标识码:A 文章编号:1 7—8 1 0 20 -2 —3 P 9. 4 6 24 0 ( 1)40 50 2
如 图 1 示 ,将 叠放 在搜 索 图 S 上平 移 ,其 覆 所 盖 下 的图像称 为 的子 图 ”。
三维光栅位移测量系统的软件设计与实现

Labview位移测量系统软件设计

Labview位移测量系统软件设计摘要:随着我国互联网计算机软件技术的不断提高,虚拟仪器已广泛应用于自动化测控领域,创造了许多实用价值。
测试软件的主要功能是实现计算机与测试仪器之间的相互通信,并完成各种数据信息的传输和处理。
基于LabVIEW的测绘软件的设计可以充分发挥各种资源工具的作用,帮助开发人员和设计人员优化和解决各种实际问题,从而全面提高测试软件设计工作的质量和效率,并节省更多的钱。
本文将进一步分析和讨论LabVIEW下的测试软件设计,旨在为同行业提供科学参考。
关键字:LabVIEW;测试软件;设计0前言近年来,LabVIEW凭借其独特的“数据流”框图编程模式已广泛用于测试和测量领域。
目前,利用LabVIEW平台开发更复杂的实时多任务测试系统已成为一种新趋势。
本文基于Labview软件平台,以MSP430作为控制器,并采用光栅位移测量技术,提出了一种可提高工作效率和测量精度的全自动位移测量系统的设计。
1系统总体设计系统的主机软件开发平台为Labview,控制器为MSP430单片机,系统设计是通过结合光栅尺,伺服系统,寻边器等硬件实现的。
X轴驱动器用于驱动X轴电机,该电机驱动读取头沿X轴移动;Y轴驱动器用于驱动Y轴电机,该Y轴电机带动光电感应寻边器沿Y轴方向移动。
光栅尺输出的正交脉冲信号经过精细分辨率的相位电路处理后,有两个信号输出。
控制器通过处理高分辨率相电路的输出信号,获得X轴的运动方向和实际位移。
系统通过串行通讯实现上位机与控制器之间的数据交互。
系统选择光栅尺为2μm的光栅尺作为位移传感器,以实现±10μm的测量精度。
光栅尺输出的AB相正交编码信号通过精细分辨率的相位电路,以提高位移测量精度。
基于Labview软件平台开发的上位机软件实现了简单易用的人机交互。
上位机通过串口与控制器进行数据交互,包括发送控制系统运行命令和接收反馈测量数据。
主机与Access数据库Connect进行通信,以实现与测量数据管理相关的操作。
霍尔传感器位移测量电路的设计
目录第一章虚拟仪器课程设计的意义及任务 (2)1.1课程设计的意义 (2)1.2 课程设计任务说明 (2)第二章关于虚拟仪器和Labview (2)2.1 虚拟仪器简介 (2)2.2 Labview概述 (3)2.2.1 Labview的发展历程 (3)2.2.2 什么是VI? (3)2.2.3 Labview的操作面板 (3)第三章霍尔传感器位移测量电路的设计 (5)3.1 设计要求 (5)3.2测量电路原理与设计 (5)3.2.1 模型的建立 (5)3.2.2 放大电路设计 (6)第四章对电路仿真分析 (7)4.1 交流分析 (7)4.2 傅里叶分析 (8)4.3 直流扫描分析 (8)4.4 传递函数分析 (9)4.5 参数扫描分析 (9)第五章LabVIEW显示模块设计 (10)5.1 位移测量子程序的设计 (10)5.2 接口电路的设计与编译 (11)第六章总结 (15)第一章虚拟仪器课程设计的意义及任务1.1课程设计的意义虚拟仪器是随着计算机技术、电子测量技术和通信技术发展起来的一种新型仪器。
在国外,虚拟仪器技术已经比较熟了,由于其很强的灵活性,使得该技术非常适用于现代复杂的测试测量系统中。
近几年,虚拟仪器技术在国内的发展势也越来越受到重视。
成熟的虚拟仪器技术由三大部分组成:高效的软件编程环境、模块化仪器和一个支持模块化I/O集成的开放的硬件构架,该课程设计的目的就是,通过一些功能简单的仪表系统的设计,要在这三个方面上有更深一步的了解。
1.2 课程设计任务说明用霍尔传感器设计一个量程范围为-0.6mm~0.6mm的位移测量仪。
霍尔传感器是利用霍尔效应实现磁电转换的一种传感器。
当霍尔元件作线性测量时,最好选用灵敏度低一点、不等位电位小、稳定性和线性度优良的霍尔元件。
当物体在一对相对的磁铁中水平运动时,在一定的范围内,磁场的大小随位移的变化而发生线性变化,利用此原理可制成位移测量器。
通过本设计,要掌握以下内容:1)了解霍尔传感器测量位移的原理;2)掌握霍尔元件的测量电路;3)熟悉Labview 虚拟仪器向Multisim 10.0的导入方法;4)测量电路硬件实现后,当输出模拟信号,会用数据采集卡进行采集;5)掌握采集后的信号在LabVIEW中的处理,实现位移值的显示;6)了解分别采用软件仿真和实际硬件电路时,在LabVIEW中编程与处理的不同。
基于LabVIEW的位移测量系统设计

( V ) 号调理 系统 A 9 。 L DT 信 D6 8
A 9 D6 8与 L DT配 合 ,能 够 高精 确 和 高 再 现 V 性 地 将 L T的机 械 位移 转 换 成 单 极 性 或双 极 性 VD 的直 流 电压 。 只要 增 加 几 个 外 接 元 件 来确 定激 磁 频率 和 增 益 ,AD6 8就 能 把 L T的 次级 输 出 信 9 VD 号按 比例 地 转 换 成 直 流 信 号 。 因 此 ,由其 构 成
范} 靠
南‘ 如
蠢
岛 {翕‘ 毒禹
蠡} 翕‘ 霸
岛‘ 高‘ 岛‘ 岛‘ 赢‘ 竞‘ 盎‘ 赢‘ 意
岛‘ 岛 每意
品‘
【 接第 17 】 上 0页
表2 制动响应 时间
n l
‘
3 )控 制 电子 化 :本 设 计 使 用微 动 开 关 电路 控
电感 传感器 与 AD6 8的连 接方 法如 图 2所示 。 9
被 铡位移量
1 位 移测量系统构成
位 移 测 量 系 统 构 成 如 图 l所 示 , 整 个 系 统 由 差 动 式 电 感 传 感 器 、 信 号 调 理 电 路 AD 9 、 6 8
电感传感器
Lb IW 软 件 、计 算 机 、数 据 采 集卡 构 成 。差 动 aV E
它 用 于 U B,有 8路 模 拟 输 入通 道 (4位 分 辨 率 , S 1 4 k /) 8 Ss ,2路模拟 输 出通 道 (2位分 辨 率 , 0Ss, 1 1 / 5 ) l 数字 I 2条 / O线 ,3 2分 辨 率 计数 器 。本 测 量 平 台
只利 用 了其 8个 模拟 通 道 的其 中一 个 —— 通 道 0, 即差 动 式 电感 传 感 器 采 集 的 微 位 移 量 经 信 号 调 理 电路 A 9 D6 8成为 模 拟 信 号 后送 入 NI B 6 0 US 一0 9通 道 0 由 L b IW 中 的 D , a VE AQ助 手 实 现 对 此 通 道 的数 据 采集 。
一维PSD位移测量设计(光电检测课设)

摘要2一、引言3二、根本原理3三、结构与测量原理3四、位移测量设计41、一维PSD位移测量原理52、一维PSD转换电路与分析6五、结论分析7参考文献8摘要半导体光电位置传感器〔即PSD〕是一种基于横向光电效应的新型半导体光电位置敏感传感器。
它除了具有光电二极管阵列和CCD的定位性能外,还具有灵敏度高、分辨率高、响应速度快、电路配置简单等特点,因而被人们所重视。
PSD 的开展趋势是高分辨率、高线性度、快响应、与信号采集处理等多功能集成。
本文基于一维PSD位置传感器非接触性测量物体位移,实现对PSD的简单应用。
关键词:半导体横向光电效应PSD位置传感器转换电路一维PSD 非接触性位移测量一、引言半导体光电位置传感器(即PSD:Position Sensitive Device)是一种光电测距器件。
它除了具有光电二极管阵列和CCD的定位性歪,还具有灵敏度高,分辨率高,响应速度快与信号采集处理等多功能集成。
PSD基于非均匀半导体"横向光电效应",达到器件对入射光或粒子位置敏感。
PSD由四局部组成:PSD传感器、电子处理元件、半导体激光源、支架〔固定PSD光传感器与激光光源相对位置〕。
PSD的主要特点是位置分辨率高、响应速度快、光谱响应X围宽、可靠性高,处理电路简单、光敏面内无盲区,可同时检测位置的光强,测量结果与光斑尺寸和形状无关。
由于其具有特有的性能,因而能获得目标位置连续变化的信号,在位置、位移、距离、角度与其相关量的检测中获得越来越广泛的应用。
在PSD光电实验中,根据读出电压值的变化,可以知道物体的运动变化,从而达到了解光电传感器的构造原理和电子线路的设计与实践、运算放大器的应用。
由于其具有精度高的优点,在测量物体时,即使测量物体位置有微小的变化,电压值都会有很明显的变化。
二、根本原理PSD是一种基于非均匀半导体横向光电效应的、对入射光或粒子位置敏感的光电器件。
PSD的光敏面能将光点位置转化为电信号,当一束光射到PSD的光敏面上时,在同一面上的不同电极之间将会有电流流过,这种电压或电流随着光点的位置变化的现象时半导体的横向光电效应。
基于Labview的位移测量系统设计

电子设计工程Electronic Design Engineering第29卷Vol.29第7期No.72021年4月Apr.2021收稿日期:2020-04-22稿件编号:202004181基金项目:院级自然科学类科研项目(ZK19-16)作者简介:罗瑜(1992—),女,陕西西安人,工学硕士,助教。
研究方向:先进控制理论与应用,控制系统建模与仿真。
位移测量在工业生产应用中非常广泛,随着工件精密度要求的提高,相对应的对测量设备的测量数据精度要求越来越高,同时对测量效率、测量数据处理、可靠性、自动化程度、可操作性都有相应的要求。
光栅尺以其适应性强、测量精度高等优势在位移测量系统应用中占有很大比重[1]。
目前,设计实现的测量系统主要表现在功能实用性方面,在测量数基于Labview 的位移测量系统设计罗瑜(陕西工业职业技术学院电气工程学院,陕西咸阳712000)摘要:基于Labview 的位移测量系统以其使用操作方便,测量分辨率高等优点,在位移测量领域应用广泛。
介绍了一种基于Labview 的位移测量系统的实现。
系统基于Labview 软件平台开发,通过串口实现数据交互,并对测量工件的尺寸加工精度进行了分析。
测量系统通过对光栅尺输出的信号进行细分辨相,提高位移测量精度,使用MSP430对细分后的信号进行处理。
系统整体实现了对X -Y 工作台上X 方向的位移测量,并将测量结果返回至上位机,上位机系统通过专用工具包与Ac⁃cess 数据库连接,实现对批量测量数据的存储和管理。
实验表明该系统测量精度高,操作方便,稳定可靠。
关键词:Labview ;光栅尺;位移测量;数据库中图分类号:TN29文献标识码:A文章编号:1674-6236(2021)07-0063-05DOI:10.14022/j.issn1674-6236.2021.07.014Design of displacement measurement system based on LabviewLUO Yu(School of Electrical Engineering ,Shaanxi Industrial Vocational and Technical College ,Xianyang712000,China )Abstract:The displacement measurement system based on Labview is widely used in the field of displacement measurement due to its convenient operation and high measurement resolution.The realization of a displacement measurement system based on Labview is introduced.The system is developed based on the Labview software platform ,realizes data exchange through the serial port ,and can analyze the measurement precision of the workpiece size.The measurement system improves thedisplacement measurement accuracy by finely distinguishing the signal output by the grating ruler ,and uses the MSP430to process the subdivided signal.The system as a whole realized the X ⁃Y table displacement measurement in the X direction ,and returned the measurement results to the host computer.The host computer system was linked to the Access database through a special toolkit to store and manage batch measurement data.Experiments show that the system has high measurement accuracy ,convenient operation ,stability and reliability.Keywords:Labview ;grating ruler ;displacement measurement ;database《电子设计工程》2021年第7期据管理和可操作性方面还有很大提升空间。
基于电涡流传感器的微位移测量系统的设计
㊀2020年㊀第9期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2020㊀No.9㊀基金项目:天津市科委青年基金项目(15JCQNJC42100);天津市科技特派员项目(16JCTPJC48100,16JCTPJC47200)收稿日期:2019-07-23基于电涡流传感器的微位移测量系统的设计荣㊀锋1,2,韩㊀信1,郭翠娟1,2(1.天津工业大学电子与信息工程学院,天津㊀300387;2.天津市光电检测技术与系统重点实验室,天津㊀300387)㊀㊀摘要:针对金属物体微位移测量困难的问题,设计了一种基于电涡流原理的位移测量系统㊂文中使用一种新型桥式结构设计了系统的硬件电路,完成金属物体的位移量到电压量的转换;使用软件拟合的方法对传感器信号进行非线性补偿和温度补偿,提高传感器的测量精度以及稳定性㊂测试结果表明,在0 2mm量程范围内电涡流传感器位移测量系统的线性度小于0.75%,最小仅有0.25%,满足金属物体微位移测量的要求㊂关键词:位移传感器;测量系统;系统补偿;非线性误差中图分类号:TP212㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2020)09-0012-07DesignofMicro⁃displacementMeasurementSystemBasedonEddyCurrentSensorRONGFeng1,2,HANXin1,GUOCui⁃juan1,2(1.SchoolofElectronicsandInformationEngineering,TianjinPolytechnicUniversity,Tianjin300387,China;2.TianjinKeyLaboratoryofOptoelectronicDetectionTechnologyandSystem,Tianjin300387,China)Abstract:Aimingatthedifficultyofmeasuringmicro⁃displacementofmetalobjects,adisplacementmeasurementsystembasedoneddycurrentprinciplewasdesigned.Inthispaper,anewtypeofbridgestructurewasusedtodesignthehardwarecircuitofthesystemtocompletetheconversionofthedisplacementofthemetalobjecttothevoltage.Thesoftwarefittingmethodwasusedtononlinearlycompensateandtemperaturecompensatethesensorsignaltoimprovethemeasurementaccuracyandstabilityofthesensorstability.Thetestresultsshowthatthelinearityoftheeddycurrentsensordisplacementmeasurementsystemislessthan0.75%andtheminimumisonly0.25%intherangeof0 2mm,whichmeetstherequirementsofmicro⁃displacementmeas⁃urementofmetalobjects.Keywords:displacementsensor;measuringsystem;systemcompensation;nonlinearerror0㊀引言机械运转监测和科学实验中经常需要进行金属物体微位移测量,位移测量方式有接触式和非接触式,非接触式测量的优点在于不需要和被测目标进行接触即可工作,效率高且不易磨损㊂利用非接触式电涡流传感器来测量位移不仅具有较高的准确度和测量精度,而且抗干扰能力强㊁可靠性好㊂本文基于电涡流原理设计了一种调幅式传感器位移测量系统㊂在电涡流传感器的阻抗测量电路中,交流电桥法是调幅式设计方法中的一种,它的优点在于具有较高的分辨率和系统稳定性㊂W.Li等[1]设计的调幅式测量电路不适用于小尺寸㊁低阻抗的传感器探测线圈,系统分辨率不高,且线圈没有接地端容易受到干扰,影响系统的稳定性;H.B.Wang等[2]设计了一种电桥式测量电路,该电路具有较高的分辨率,但是使用探测线圈和参考线圈搭建的电桥电路对参考线圈阻抗值的精度要求很高,且线圈阻抗受环境影响较大,引入参考线圈容易影响系统的稳定性㊂本文提出了一种新型电桥式位移测量方案,使用高精度低温漂的电阻电容替代参考线圈设计了交流电桥,不仅拥有较高的分辨率,而且排除了参考线圈的不稳定因素,提高了系统的稳定性㊂本文使用高性能仪表放大器和高精度低温漂器件设计传感器位移测量系统的硬件电路,并使用软件对输出信号进行非线性补偿和温度补偿,完成了具有高精度㊁高稳定性等优异性能的电涡流传感器位移测量系统的设计㊂本文的研究成果为电涡流传感器位移测量的有关设计提供了一种参考解决方案㊂㊀㊀㊀㊀㊀第9期荣锋等:基于电涡流传感器的微位移测量系统的设计13㊀㊀1㊀测量原理电涡流传感器位移测量的原理是电涡流效应,而电涡流效应的机理是电磁感应㊂麦克斯韦提出了 位移电流 和 涡旋电场 假说,用麦克斯韦第一方程和第二方程的积分形式表示为:ɥlHң㊃dlң=ʏs(Jң+∂Dң)∂t)㊃dsң(1)ɥlE㊃dlң=-ʏs∂Bң∂t㊃dsң(2)式中:H为磁场强度;J为电流面密度;D为电位移矢量;E为电场强度;B为磁感应强度㊂麦克斯韦第一方程表明了变化的电场可以产生磁场,第二方程表明了变化的磁场可以产生电场,这两个方程解释了通电线圈磁场和金属导体涡流磁场的由来㊂图1是电涡流传感器原理图㊂当激励源施加激励信号到探测线圈上,线圈四周产生交变磁场H1,该交变磁场在空间中产生感应电场㊂当金属导体靠近线圈时,感应电场在金属导体中产生感应电流,即电涡流㊂电涡流产生涡流磁场H2,该磁场方向和线圈磁场H1的方向相反,因而削弱了线圈磁场,使得线圈的有效阻抗发生改变[3]㊂根据探测线圈阻抗的变化,设计位移测量电路即可实现金属物体位移的测量㊂图1㊀电涡流传感器原理图2㊀系统硬件设计电涡流传感器位移测量系统的硬件部分主要由信号发生模块㊁信号提取模块㊁相敏检波模块㊁后级输出模块㊁信号补偿模块组成,系统的硬件总体框图如图2所示㊂探测线圈作为电桥电路中的一支桥臂,激励信号施加到电桥电路中,利用差分放大器放大电桥信号;前置放大器输出的信号经过相敏检波电路进行解调,通过低通滤波器滤掉交流信号获取直流信号[4];解调出来的直流信号经过电压正偏置后由后级放大器进行零电位调整和放大,再由模拟数字转换器采集该信号,通过软件求出拟合方程,并利用微处理器进行信号的非线性校正和温度补偿;最后通过液晶显示器显示电涡流传感器的位移测量结果㊂图2㊀系统硬件总体框图2.1㊀信号发生模块电路设计信号发生模块包括正弦信号发生电路和功率放大电路㊂正弦信号发生电路的作用是产生1MHz的正弦激励信号,原理图如图3所示㊂有源温补晶振振荡产生1MHz的方波信号,常温下频率稳定性为0.1ppm/ħ,-40 80ħ温度频差为1.5ppm/ħ,频率稳定性高(1ppm=10-6)㊂图3㊀正弦信号发生电路原理图㊀㊀㊀㊀㊀14㊀InstrumentTechniqueandSensorSep.2020㊀从1MHz的方波中获取1MHz的正弦波,其原理是对方波信号进行傅里叶级数展开,展开式为f(t)=2Eπ(sinw0t+13sin3w0t+15sin5w0t+ +1nsinnw0t)(n=1,3,5,7 )(3)展开式中包含一次谐波和多次谐波,利用低通滤波器滤除方波信号中的二次和二次以上的谐波分量,保留一次谐波即可得到1MHz的正弦信号㊂本文使用高速运算放大器AD817设计截止频率为1.5MHz的四阶有源低通滤波器进行滤波㊂由于信号发生电路产生的激励信号电流较小,驱动能力较弱,需要进行功率放大以驱动线圈㊂本文选用电流反馈运算放大器THS3095构成反向放大器,该运放宽带宽,低失真,电流驱动能力高达250mA,其原理图如图4所示㊂图4㊀功率放大电路原理图2.2㊀信号提取模块电路设计信号提取模块电路包括电桥电路和前置差分放大电路,目的是将被测位移的变化转化为电压量变化并进行放大,其原理图如图5所示㊂电桥电路中,P是探测线圈,传统的电桥方案使用和探测线圈同阻抗的参考线圈使得电桥达到平衡,本文使用并联型电阻电容替代参考线圈㊂探测线圈可近似看作电阻和电感的串联,分别记做r和L,电桥的平衡条件为R10r+jwL=R9ʊ1jwC17R11(4)即满足:R9=LrC17,R11=rR9R10(5)线圈的阻抗通过Agilent4294A阻抗分析仪在1MHz的激励信号下测得线圈电阻r为14.4Ω,线圈电感L为32.5μH,根据式(5)合理选取电桥的其他参数,使得电桥达到平衡㊂前置差分放大器选用INA103,它由3个运算放大器对称组成,输入噪声仅有1nV/Hz,增益带宽积为图5㊀信号提取模块电路原理图100MHz,共模抑制比大于100dB,适用于本文中交流电桥微弱信号的差动放大㊂该放大器的增益通过改变电阻RG1来调整,放大倍数G1=1+6kΩ/RG1,本文中放大倍数设定为51㊂信号提取模块电路选用KOA的高精度低温漂电阻,电阻精度为0.1%,温漂系数仅为5ˑ10-6/ħ,以减小传感器的输出漂移㊂2.3㊀相敏检波模块电路设计为了获得由线圈阻抗变化引起发生改变的电压信号,本文采用相敏检波的方法进行鉴别[5]㊂相敏检波使用的器件是四象限电压输出模拟乘法器AD835,该乘法器乘积噪声低,响应快,其原理图如图6所示㊂乘法器的一端输入待检波信号,另一端输入激励信号作为参考信号,其输出函数为W=(X1-X2)(Y1-Y2)/U+Z,本文中U=1,Z=0㊂假设乘法器输入端的待检波信号和参考信号分别为acos(wt+φ1)和bcos(wt+φ2),则输出W为㊀㊀㊀W=acos(wt+φ1)㊃bcos(wt+φ2)=ab2[cos(2wt+φ1+φ2)+cos(φ1-φ2)](6)输出信号中包含交流分量和直流分量,经过无源低通滤波器滤掉交流成分,滤波器的截止频率为3.6kHz㊂低通滤波后得到直流分量abcos(φ1-φ2)/2,其大小只受被检波信号的幅值影响,且是正比关系,而被检波信号的幅值只和线圈的阻抗有关,因此达到了检波的目的㊂滤波器输出后需要接入电压隔离模块,避免后级电路影响前级输出的信号㊂2.4㊀后级输出模块电路设计后级输出模块电路包括基准电压源电路㊁电压偏置电路以及输出放大电路,目的是放大输出信号和提高传感器的输出灵敏度,其原理图如图7所示㊂基准电压源采用精密电压参考源LM4040B301,-40 85ħ工作温度范围内稳定输出3V电压,目的是给电压偏置电路和给后级放大电路提供参考电压㊂电压偏置电路采用精密运算放大器OPA192,作用是将相敏检㊀㊀㊀㊀㊀第9期荣锋等:基于电涡流传感器的微位移测量系统的设计15㊀㊀图6㊀相敏检波模块电路原理图图7㊀后级输出模块电路原理图波出的直流信号在其变化范围内抬升为正电压,保证后级电压采集时没有负电压㊂输出放大电路使用低功耗仪表放大器AD8421,它具有高精度的直流性能,共模抑制比高达94dB,输入失调电压漂移最大只有0.2μV/ħ,最大增益漂移1ppm/ħ,适合作为后级直流放大器㊂AD8421的传递函数为VOUT=Gˑ(V+IN-V-IN)+VREF(7)式中:G为放大倍数,G=1+9.9kΩ/RG2,文中放大倍数设定为120;VREF为参考电压,VREF=0V㊂文中仪表放大器AD8421采用单电源供电,提升了放大器的供电电压和输出电压的范围,放大器使用参考电压作为输入端,使得放大器同时具有放大功能和零电位调整功能,提高了系统的灵敏度㊂2.5㊀信号补偿模块电路设计信号补偿模块采用软硬件结合的方法进行设计,其硬件部分是基于ARM微处理器STM32F103完成的,包括AD采样模块㊁液晶显示模块和温度测量模块㊂本文使用的ADC模块是STM32自带的12位逐次逼近型模拟数字转换器,STM32的ADC有18个通道,可测量16个外部和2个内部信号源,ADC最大转换速率为1MHz㊂本文使用的ADC电压参考源为前文提到的3V基准电压源LM4040B301,可为ADC模块提供精确的参考电压㊂液晶显示模块使用的是4.3ᵡTFTLCD模块(1ᵡ=2.54cm),支持16位真彩显示,自带触摸屏㊂温度测量模块使用的是DS18B20数字温度传感器,其温度测量范围为-55 +125ħ,当温度范围超过-10 85ħ范围之外时还具有0.5ħ的精度㊂电涡流传感器输出的信号先由ADC模块采样,然后由微处理器处理采样信号和温度传感器输出的信号,最后通过液晶屏显示传感器系统测量的位移值㊂3㊀系统补偿方案设计由于电涡流传感器位移测量具有严重的非线性特性,主要原因有:目标金属的位移和线圈阻抗的变化是非线性关系;线圈阻抗的变化和电桥的输出是非线性关系;电子器件的输入和输出不是绝对的线性关系㊂因此需要给传感器位移测量系统接入非线性补偿模块,以使系统的输出和目标金属的位移呈线性关系㊂此外,系统的输出受温度影响较为明显,其主要原因是探测线圈的阻抗受温度影响较大,由于本文使用的电子器件都是低温漂器件,输出受温度影响很小,因此系统整体的温度漂移主要来源于探测线圈㊂温度的变化影响系统的测量精度和线性度,需要设计温度补偿模块以排除温度的干扰[6]㊂本文采用软件拟合的方法结合微处理器对系统进行非线性补偿和温度补偿㊂假设电涡流传感器输出的电压为UX,温度传感器测得环境温度为CT,金属导体的位移X与UX和CT有关,因此X是UX㊁CT上的二元函数,故采用二元函数拟合的方法进行补偿㊂本文使用二元回归分析算法,即融合处理两个变量得到唯一的输出结果[7]㊂二元回归模型如图8所示,即用UX和CT联合表示X:X=f(UX,CT)(8)图8㊀二元回归模型框图为了获得不同位移和不同温度下电涡流传感器位移测量系统输出的电压数据,本文搭建了图9所示的实验示意图[8]㊂该实验平台包括恒温箱和位移装置,恒温箱温度调节范围为室温至120ħ,位移装置的最高测量精度为0.5μm/格㊂将位移装置放到恒温箱中,传感器探测线圈固定到位移装置上,调节位移装置和恒温箱温度并进行实验㊂为了减少实验时间和保证数据的可靠性,实验按照升温的过程进行,每个温度下先恒温20min再进行实验㊂㊀㊀㊀㊀㊀16㊀InstrumentTechniqueandSensorSep.2020㊀图9㊀实验测试平台从实验平台测得的数据记录在表1中㊂根据实验标定的数据建立二元回归方程:X=α00+α10UX+α01CT+α20U2X+α11UXCT+α02C2T+α30U3X+α21U2XCT+α12UXCTC2T+α03C3T+α40U4X+α31U3XCT+α22U2XC2T+α13UXC3T+α50U5X+α41U4XCT+α32U3XC2T+α23U2XC3T(9)式中:X为补偿后的位移测量系统输出的位移值;α00,α10,α01 为常系数㊂表1㊀不同温度下涡流传感器输出电压输入位移/mm不同温度下系统输出电压/V22.5ħ25.8ħ31.6ħ36.6ħ40.7ħ45.4ħ51.0ħ56.6ħ61.6ħ00.2880.5261.0881.5441.9132.4352.9523.5994.2830.11.8382.0352.4762.8553.1293.5593.9194.3804.9470.23.8384.0304.4354.7845.0865.4585.8176.2486.7950.35.6255.8176.2026.5166.8107.1507.5197.9298.4560.47.2457.4177.7978.0968.3748.6949.0489.4589.9540.58.6838.8669.2259.5049.77710.07610.42510.83011.3110.69.96410.15210.52110.77511.01811.31611.66612.05612.5370.711.12911.31611.66111.91912.17212.44012.78013.16513.6300.812.17212.35412.70412.95713.19013.45313.78714.18714.6230.913.11413.29613.62513.87814.41614.36514.69915.08915.5191.013.96014.13714.48614.71414.95215.20015.51415.90416.3391.114.71914.90115.24115.46815.70615.92416.25316.64817.0741.215.40315.58015.91916.15216.38516.59316.91717.33217.7321.316.02516.21816.53216.77017.01817.21017.52917.93918.3391.416.58716.78517.09917.33717.58517.76218.08118.50118.8861.517.09917.29617.61517.84318.08618.26918.57719.02319.4181.617.57017.75718.07618.31418.54218.72919.04319.46719.8531.717.99018.18218.50118.73918.96719.15019.44819.84420.2481.818.37518.56718.88619.12919.34719.52519.81320.21320.5981.918.72918.91719.23119.47919.70719.85320.14220.54320.9582.019.05319.24119.54519.78320.01520.17820.41520.79621.256根据式(9)可知,求解的关键问题在于常系数值的确定,本文使用软件运用最小二乘法进行拟合来求解方程的系数㊂根据表1中的数据,按照式(9)的函数模型进行拟合,得到拟合图形如图10所示㊂从图10中可以看到实验标定的数据点都在拟合曲面上说明,二元函数的拟合效果较好,且最优拟合系数分别为:α00=0.3058,α10=-0.0001262,α01=-0.0221,α20=-0.002468,α11=0.005407,α02=0.000471,α30=0.001485,α21=-0.0006179,α12=-8.411ˑ10-5,α03=-6.258ˑ10-6,α40=-0.0001129,α31=3.4ˑ10-5,α22=2.631ˑ10-6,α13=1.283ˑ10-6,α31=3.4ˑ10-5,图10㊀二元函数拟合图形α22=2.631ˑ10-6,α13=1.283ˑ10-6,α50=3.176ˑ10-6,α41=-1.09ˑ10-6,α32=1.636ˑ10-7,α23=-7.102ˑ10-8㊂㊀㊀㊀㊀㊀第9期荣锋等:基于电涡流传感器的微位移测量系统的设计17㊀㊀将以上系数带入式(9)得到电涡流传感器位移测量系统的补偿方程,再将补偿方程导入微处理器,完成系统的补偿设计㊂4㊀性能验证试验为了测试电涡流传感器位移测量系统的性能,本文进行了系统性能验证试验,包括输入输出特性测试和稳定性测试㊂系统性能验证试验如图11所示㊂图11㊀系统性能验证试验4.1㊀输入输出特性测试本文对不同位移和不同温度下的电涡流传感器位移测量系统的输入输出位移进行了对比实验[9]㊂实验中位移测试间隔为100μm,测量范围为0 2mm,测试温度分别为25.4㊁31.0㊁36.7㊁42.6㊁47.5㊁51.6㊁56.6㊁60.6ħ㊂本文以传感器测量系统的输入位移为横轴,以系统补偿后的输出位移为纵轴,得到的实验结果如图12所示㊂从图12中可以看出,不同温度下电涡流传感器位移测量系统的输入输出特性曲线基本呈现为斜率为1的直线,表明了系统的输入和输出具有高度的一致性㊂电涡流传感器位移测量系统的输出误差如表2所示㊂图12㊀传感器系统输入输出特性曲线表2㊀不同温度下位移输出误差输入位移/mm不同温度下系统输出误差/mm25.4ħ31.0ħ36.7ħ42.6ħ47.5ħ51.6ħ56.6ħ60.6ħ00.0010.0060.0070.0100.0120.0060.0070.0060.10.0010.0020.0070.0030.0020.0120.0050.0030.20.0020.0010.0040.0050.0080.0020.0030.0030.30.0010.0030.0040.0060.00300.0030.0050.40.0020.0010.0010.0030.0010.00200.0020.50.0020.0010.0010.0020.0020.0040.0020.0010.60.0010.0020.0040.0010.0010.0030.0010.0020.70.0020.0030.0050.0010.0010.0020.0020.0020.80.0020.0020.0040.0020.0010.0020.0030.0040.900.0010.00300.0020.0030.0040.0051.00.00100.0010.0020.0030.0030.0050.0071.10.0020.0010.0020.0030.0030.0040.0050.0051.20.0040.0050.0040.0040.0060.0050.0030.0051.30.0040.0070.0040.0040.0060.0030.0030.0041.40.0050.0060.0040.0050.0040.0030.0010.0031.50.0040.0050.0030.0040.00200.0050.0041.60.0020.0010.0010.0060.0020.0020.0050.0101.700.00100.0030.0010.0020.0090.0121.80.0020.0020.0020.0020.0030.0080.0110.0141.90.0030.0040.0010.0010.0020.0030.0130.0132.00.0030.0040.0030.0020.0030.0020.0140.015㊀㊀㊀㊀㊀㊀㊀18㊀InstrumentTechniqueandSensorSep.2020㊀从表2中可以看出,在2mm测量范围内,不同温度和不同位移下的位移测量系统的输出绝对误差在5μm左右,个别绝对误差超过10μm,表明了系统测量精度高,也说明了二元函数拟合的方法具有较高的校正精度㊂传感器的线性度定义为δL=ʃΔYmaxYˑ100%(10)式中:δL为线性度;ΔYmax为校准曲线与拟合直线的最大偏差;Y为传感器满量程输出㊂根据线性度的定义,从表2中计算得到传感器位移测量系统的线性度在25.4ħ时最小,在60.6ħ时最大,线性度分别为0.25%和0.75%,线性误差较小,结合图12,说明本文设计的电涡流传感器位移测量系统的线性程度较好㊂4.2㊀稳定性测试系统稳定性测试主要测试工作状态下的电涡流传感器位移测量系统在一段时间内的稳定性㊂本文选择在常温下进行实验,将恒温箱调到25ħ恒温,在量程范围内将位移装置设定在若干个位置处㊂实验前系统先预热5min,然后每隔1min测量一次输出电压和位移,持续测量2h,共采集120个数据,分析传感器位移测量系统的稳定性[10]㊂图13是量程中点处的实验数据,在2h测量过程中,系统的输出电压在14.083 14.106V(1.000 1.003mm)范围内随机变化,电压漂移在23mV以内,位移漂移在3μm以内,电压和位移漂移都比较小㊂同理,将位移装置设定在其他位置处进行测试,测试结果表明本文所研制的电涡流传感器位移测量系统稳定性能良好㊂图13㊀稳定性实验数据5㊀结束语本文设计了一种桥式电涡流传感器位移测量系统,并通过软件进行非线性补偿和温度补偿,实现了金属物体位移的测量㊂该位移测量系统测量精度达到微米级,拥有良好的线性和稳定性,在金属微位移测量领域具有较强的实用性㊂参考文献:[1]㊀LIW,WANGHB,FENGZH.Non⁃contactonlinethicknessmeasurementsystemformetalfilmsbasedoneddycurrentsensingwithdistancetrackingtechnique[J].ReviewofSci⁃enceInstrument,2016,87(4):2525-2565.[2]㊀WANGHB,FENGZH.Ultrastableandhighlysensitiveeddycurrentdisplacementsensorusingself⁃temperaturecompen⁃sation[J].SensorsandActuatorsA:Physical,2013,203:362-368.[3]㊀赵友全,刘潇,陈玉榜,等.微型涡流电导率测量传感器的优化设计[J].电子测量与仪器学报,2015,29(4):598-603.[4]㊀于金鹏,周燕,莫逆,等.基于FPGA的数字化电涡流位移传感器设计[J].清华大学学报(自然科学版),2018,58(3):330-336.[5]㊀曹钊滨,宋文爱,杨录,等.桥式涡流检测系统的研究与设计[J].仪表技术与传感器,2013(3):61-63.[6]㊀谢锋,程文进,曹勇全.基于数据处理的高精度温压复合传感器的研究与设计[J].传感技术学报,2017,30(12):1845-1849.[7]㊀刘伟,李杰,王一焕.基于融合模型的高精度倾角测量系统设计[J].传感技术学报,2016,29(10):1619-1624.[8]㊀吕云腾,祝长生.基于温漂补偿的高温电涡流位移传感器[J].浙江大学学报(工学版),2015,49(4):749-753;781.[9]㊀李照华,焦新泉,贾兴中.一种压电加速度传感器调理电路设计[J].仪表技术与传感器,2017(10):10-13;28.[10]㊀LIW,WANGHB,FENGZH.Ultrahigh⁃resolutionandnon⁃contactdiametermeasurementofmetallicwi⁃reusingeddycurrentsensor[J].ReviewofScienceI-strument,2015,85(8):554-561.作者简介:荣锋(1979 ),副教授,博士,主要研究方向为无损检测,信号采集与分析,故障监测㊂E⁃mail:shusheng677@163.com韩信(1994 ),硕士研究生,主要研究方向为电磁传感器㊂E⁃mail:smilenah@163.com。
基于ZigBee的无线位移测量系统的设计
2 1 J 1 9无线 微控 制器 简介 . N5 3
uA 十 u 曰
1 无线位移测控 系统总体 设计
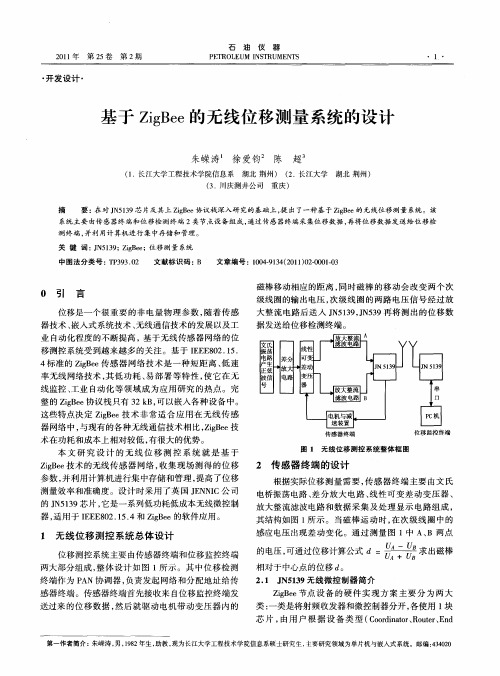
位移测控系统主要 由传感器终端和位移监控终端 两大部分组成 , 整体设计 如图 1 所示 。其 中位移检测 终 端作 为 P N协 调 器 , A 负责发 起 网络 和 分 配地 址 给传
为了 降低系 统对 微 处 理 器 的要 求 , 系统 采 用 放 大
整流滤波电路将次级线圈输出的两路交流信号转化为 直流信号 , 具体电路如 图 3 所示。其中整 流滤波电路
采用 二极 管包络 检波 电路 , 电路结 构简单 , 以得 到 该 可 失真较 小 的直流 信 号 , 较 好 的 满足 系 统 的需 求 。电 能 路选用 运 算 放 大 器 O 28 检 波 二 极 管 为 I40 , P2 , N 07 电
感 器终 端 。传 感器 终端 首 先接 收来 自位 移监 控终 端发
求 出磁棒
Zg e 节点设备 的硬件实现方 案主要分 为两大 i e B 类: 一类是将射频收发器和微控制器分开 , 各使用 1 块 芯片 , 由用 户根据 设备 类型 ( ori t 、 ot 、 n Co n o Ru r d d ar eE
(. 3 川庆测井公 司 重庆 )
湖北 荆州 )
摘
要 : 对 J 53 在 N 19芯片及其上 Zg e i e协议栈深入研 究的基础上 , 出了一种基 于Zg e B 提 i e的无线位移测量 系统。该 B
系统主要 由传感 器终端和位移检测 终端 2类节点设备 组成 , 通过传 感器终端采集位移数据 , 再将位移数据发 送给位移检 测终 端 , 并利 用计 算机进行 集 中存储和 管理 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要在现代工业生产过程中,常常需要测量很多不同的位移量。
与此同时对位移量进行较为精确地检测,是提高控制精度的基础。
因此之前所普遍采用的传统位移测量装置已经不能适应时代发展的潮流。
在此情况下通过科研人员的不断努力终于研制出了数字式光电编码器,它的输入量是角位移量其输出量是相应的电脉冲,并且它有体积小,精度高的优点。
故而,这次毕业设计选用的是光电编码器。
本次毕业设计是以AT89C51单片机为核心,用光电编码器来实现对位移量的精确测量,再将测量结果显示在LCD液晶显示器上。
其中本次设计中所选用的是输出电压为5V的光电编码器。
本文由浅入深先介绍了一些关于位移测量的基本原理,进而阐述了各个模块的设计思路,工作过程以及显示效果。
本文借鉴了一些当前较为流行的设计思想,例如硬件软件化,很好的满足了设计要求。
关键词:位移,测量,光电编码器,单片机,LCD显示器AbstractIn the control field, a variety of displacement measurements often need to be carried out. In actual industry position control domain, to increase the control precision, carries on the examination to the controlled member is accurately very important.The traditional machinery survey displacement installs has not been able to satisfy the modern production by far the need, but the digital sensor electro-optic encoder, can transform the angular displacement into with it correspondence electricity pulse output, mainly uses in the mechanical position and the velocity of whirl examination, has the precision to be high, volume small and so on characteristics, therefore this design decided that uses the electro-optical encoder to carry on the displacement to examine.This design to use the electro-optical encoder to realize the displacement survey and the simulation, realizes the survey from the exterior different displacement value and the demonstration. Makes concrete using at89C51 monolithic integrated circuit is the core, the electro-optical encoder carries on the displacement to survey, simultaneously by LCD liquid crystal display module demonstration. This design uses the electro-optical encoder output voltage is 5V, the output signal after four doubling circuit processing sends in the monolithic integrated circuit to carry on counting processing, finally sends in the LCD module demonstration.In this paper, detailed working process of displacement measurement system is started with principle of displacement measurement, and hardware circuit design and display. This paper has absorbed the idea of hardware and software to achieve with the subject required functionality.Key words:The displacement surveys, electro-optical encoder, microcontroller, LCD displaymodule目录第一章绪论·················································1.1位移测量及其传感器简介··································1.2光栅位移测量技术简介··································第二章原理及方案说明···································2.1 方案选择及原理··········································2.2位移测量参数及电路参数分析······························第三章系统电路的设计········································3.1 硬件电路的设计···········································3.1.1 单片机的选择·········································3.1.2 AT89C51的介绍········································3.1.3 1XP8001-1简介········································3.2 软件的设计···············································第四章显示部分···············································4.1 LCD显示器················································4.2 LCD分类及特点······································4.3 LCD1602液晶显示器································第五章仿真实现················································5.1 PROTEUS仿真软件简介·······································5.2 KEIL软件的简介··································结论······························································致谢······························································参考文献··························································第一章绪论1.1位移测量及其传感器简介位移包括线位移和角位移。