汽车集团整车控制器HIL实例介绍专题培训课件
电动汽车整车控制器PPT学习教案

表示车辆处于纯电 动驱动模式
点亮说明上电结束 车辆可开始运行
来自总线信号,受 整车控制器控制
在该灯点亮时无法 进入行车状态。 来自总线信号,受 整车控制器控制 来自总线信号,受 整车控制器控制
来自总线信号,受 整车控制器控制 来自总线信号,受 整车控制器控制
12V 低压电气系统
整 车 控 制 系 统 组 成
高压系统
整车 网络 控制 系统
第4页/共18页
1.低 压 电 气 系 统 低压电气系统有12V辅助电池和低压 电气设 备组成 ,其作 用有2个 : 1.为灯光、仪表等常规低压电气设备 供电; 2.为整车控制器、电机控制器和部分 辅助部 件供电 。
2.高 压 电 气 系 统 高压电气系统由动力电池、驱动电机 及控制 器、空 调压缩 机及控 制器、 DC等组 成。
制动能量回收原则:不干预液压系 统ABS的工作 ,优先 级低于ABS
第11页/共18页
5.故障诊断与处理
整车控制器连续检测各控制系统, 并进行 故障诊 断和相 应的安 全保护 处理, 同时还 对故障 进行:① 等级 分类,② 报警 显示、③ 存储 故障码 等处理 。
整车控制器将电动汽车的故障分为4级: 一 级 致 命 故 障 需 紧急断 开高压 电!! ! 二 级 严 重 故 障 电 机0转 矩输出 动力电 池限流 20A输 出 !! 三级 一般故障 跛行 降低功率 限速15-20km/h! 四级 轻微故障 停止能量回收 仪表进行故障显示,行驶不受影响
第5页/共18页
二、整车控制器简介
整车控制器简称VCU(vehicle contorl unit) 是整车控制系统的核心,承担车辆各 系统的 数据交 换与管 理,故 障诊断 、安全 监控、 驾驶人 意图解 析等作 用。
纯电动汽车电机及控制器技术培训ppt课件

驱动方程
驱动系统的动力输出特性与车辆的动力性 能直接相关。驱动系统的动力输出应该满 足车辆的动力性要求。在设计电动汽车驱 动系统时,为了使电动汽车达到要求的动 力性能指标,首先必须建立电动汽车的力 学模型,对电动汽车行驶过程中力与功率 的平衡进行分析,以得到电动汽车的需求 特性场。
主要部件选型
组成
动力电池组
控制装置
驱动电动机
传动系统
驱动系统
结构形式 ◇传统的驱动系统 ◇简化的传统驱动系统 ◇电动机—驱动桥整体式驱动系统 ◇双电动机驱动系统 ◇内转子电动轮驱动系统 ◇外转子电动轮驱动系统
驱动轮
2.1.2 传统的驱动系统
电动机替代发动机。 仍然采用内燃机汽车的传动系统,包括离合器、变 速器、传动轴和驱动桥等总成。 有电动机前置、驱动桥前置(F-F),电动机前置、驱 动桥后置(F-R)等各种驱动模式。 结构复杂,效率低,不能充分发挥电动机的性能。
4、具有良好的效率特性,在较宽的转速/转矩范 围内,获得最优的效率,提高一次充电后的持续行驶 里程,一般要求在典型的驾驶循环区,获得85%~ 93%的效率。
5、再生制动时的能量回收率高。 6电动机的外形尺寸要求尽可能小,质量尽可能 轻; 7电动机的可靠性好,耐温和耐潮性能强,能够 在较恶劣的环境下长期工作,运行时噪音低,维 修方便。
统的真空泵等,也需要动力电池组提供动力电能。 低压电源 动力电池组通过DC/DC转换器,供应12V或24V低压 电,并储存到低压电池组中,作为仪表、照明和信 号装置等工作的电源。
2.0.3 基本组成
2.电池管理系统 管理
◇对动力电池组充电与放电时的电流、电压、放电深 度、再生制动反馈电流、电池温度等进行控制。
设计纯电动汽车首先要进行选型设计,除了车型选 择外,电机类型与其性能 参数、电池类型与其性能参数、控制方式的选择、 电池数量的选择等都是首先要确定的。 1电机功率的选择
第六章 电动汽车整车控制器课件ppt
2021/3/10
ቤተ መጻሕፍቲ ባይዱ16
6.6 PCB 设计
▪ PCB 设计 ▪ 根据功能分析绘制电路原理图,需要建立
元件库中不存在的元器件模型,并根 ▪ 据价格、性能和市场行情确定选用的芯片
电路,具备线控功能,并且都设置了自 ▪ 拉高电路,以实现硬件电路的自诊断。拉
高电压可以是 12V 电源电压,也可以是标 ▪ 准的 5V 拉高电压。拉高过程都2具021/有3/10 很好的 11
6.4 主要模块电路
▪ [3] 电源模块 ▪ 电源电路是车载控制器设计中比较困难的
设计之一,也是影响能否通过电磁兼 ▪ 容测试的关键部件。为使混合动力 HCU 具
▪ 硬件开发过程中需首先考虑的事项有:
▪ 1) 开发系统支持的编程语言;
▪ 2) 开发系统使用的开发平台;
▪ 3) 开发系统的功能;
▪ 4) 友好的集成开发环境;
▪ 5) 确定控制单元输入/输出管脚的数量 和性质;
2021/3/10
6
6.3整车控制器单片机系统
▪ 为了实现 CAN 总线通讯和为 HCU 系统留足 够的富裕扩展能力,在原有工作基
有较好的适应性、通用性,我们采用了 ▪ 两级电源控制,第一级采用开关电源模块,
以保证电源的供电电压在 8~32VDC 的 ▪ 范围内都有一致的输出电压,从而使第二
级低压差电源能够有一个非常稳定的输出 ▪ 电压[2]。这样既保证了控制器的202工1/3/1作0 稳定 12
6.4 主要模块电路
▪ [4] 上下电和安全保护模块[21] ▪ HCU还承担着整车低压电源的控制,如果钥
实例:Freescale16 位单片机 MC9S12DP512原理图
2021/3/10
整车控制器全解PPT课件

总的来看,虽然电动汽车拥有广阔的市场前景, 但是整个产业的发展还需要一个漫长趋于成熟的过 程。针对我国在电动汽车推广中遇到的问题,应对 的策略应该以政府为主导,协调汽车企业、电网企 业、汽车经销商和相关企业之间的关系,共同推进 电动汽车的产业化。
第28页/共30页
第29页/共30页
感谢您的观看!
第19页/共30页
第20页/共30页
2.2湖南大学整车控制器 电机及整车总成控制器以电动汽车用交流电
机驱动系统为研究对象,将直接转矩控制思想运 用于电动汽车驱动系统。根据电动汽车所要达到 的性能指标,分析了电动汽车驱动系统的特点, 对各种驱动电机进行了比较。采用空间电压矢量 方法分析了直接转矩控制的基本原理结构及其算 法。控制器原理图如下:
第8页/共30页
e. 90 年代末,丰田公司研制出 RAV-4 EV 型 纯电动轿车,动力装置:交流同步电动机,由 288V 氢电池提供电能,最高车速为 125km/h。
丰田公司整车控制器
整车控制器接收整车控制器接收驾驶员的 操作信号和汽车的运动传感器信号,控制器将这 些信号经过控制策略计算,通过左右2组电机控 制器和逆变器分别驱动左后轮和右后轮。控制器 原理图如下:
第2页/共30页
二、控制器的简介
1.整车控制器(VMS),即动力总成控制器。作 为核心控制部件,它采集加速踏板信号、制动踏 板信号及其他部件信号,并做出相应判断后,控 制下层的各部件控制器的动作,驱动汽车正常行 驶。
2.控制器主要功能:驱动力矩控制、制动能量的 优化控制、整车的能量管理、CAN网络的维护和 管理、故障的诊断和处理、车辆状态监视等。
目 录
1
控制器的研究背景
2
控制器简介
整车控制器基础知识培训

整车电器附件的管理控制,以得到最优化的能量利用和整
车需求。
序号 1 2 3 4 5 6
附件 倒车灯控制 日间行车灯控制 DC-DC 水泵 真空泵 空调
PPT文档演模板
整车控制器基础知识培训
有什么作用
10. 故障诊断 符合ISO15765标准的故障诊断协议。
PPT文档演模板
整车控制器基础知识培训
11. 在线标定 符合CCP标准的标定协议。
PPT文档演模板
整车控制器基础知识培训
是什么东西?
PPT文档演模板
整车控制器基础知识培训
什么是控制器?
信号检 测
运算/ 决策
我们身边有哪些控制器 ?
是什么东西?
控制执 行机构
PPT文档演模板
整车控制器基础知识培训
什么是控制器?
附近是否有人
是什么东西?
开启/关闭
PPT文档演模板
整车控制器基础知识培训
PPT文档演模板
有什么作用
整车控制器基础知识培训
有什么作用
3. 整车能量管理 对于纯电动汽车,整车控制器通过对整车能量源状态
进行监控,以协调车辆动力输出和其他高压附件工作状态 为手段,最大化优化整车能量利用效率,延长续航里程。
PPT文档演模板
整车控制器基础知识培训
有什么作用
4. 驱动控制 以驾驶员驱动扭矩需求和动力系统实时状态为基础,
什么是控制器?
光线 声音
光线低于标定阈值,且 声音大于标定阈值
开启开关,延时关闭; 否则,开关保持关闭。
是什么东西?
开关
PPT文档演模板
整车控制器基础知识培训
用于电动汽车、 混合动力汽车等
是什么东西?
-----汽车集团整车控制器HIL实例介绍知识讲解
PXIe-6363模块
32路DIO 10MHz频率
PXI-8513模块
双路CAN 高低速兼容
整车simulink模型
①
在simulink中搭建整车动力学模型,如下图
02
PART
②
通过NI工具包将simulink模型导成 .dll文件,最终导 入PXI机箱运行
②
器输出转矩,同时限制电机的最高转速,
最高车速限制为100km/h,主减比5.1,
轮胎半径360mm
ON断开:根据当前状态,进行电机负载
④
卸载;卸载后断开各高压回路;复位高
压故障诊断;保存故障代码、行驶参数
等;最后断开低压自保控制
系统结构介绍
02
机柜总成结构
PART
供电箱及开关 工控机 PXI机箱 适配器
为16s
车辆的最高速度除了受到驱动力和负载阻力的限制,还受到整车控制器发给 电机控制器指令报文(0xCFF08EF)的转速正值限制。目前电机工作在转矩模 式,通过该转速正值,限制电机的最高转速,同时限制车速。当为满载质量 时,最高速度是由转速正值限制,此时整车控制器发出的指令转矩是260Nm, HIL模型计算得到的电机的实际输出转矩130.3Nm,在该转矩下,电机转速保 持在3800rpm。
PART
①
输入加速踏板到最大值,电压达到4.2V
②
观察整车控制器发给电机控制器指令报文 (0xCFF08EF)的指令转矩值,可以观察到当车速 为0时,指令转矩值为520Nm
③
整车动力学模型根据收到的指令转矩,计算得到驱
动电机的实际输出电磁转矩
测试过程
④
车辆加速,在前面板可以实时观测车速,电机转
1.电动汽车整车控制课件

第四章
故障分级及处理方式
15
第四章
故障分级及处理方式
16
整车控制器架构图
第四章
故障分级及处理方式
17
整车CAN总线网关及网络化管理 在整车的网络管理中,整车控制器是信息控制的中心,负责信息的 组织与传输,网络状态的监控,网络节点的管理,信息优先权的动 态分配以及网络故障的诊断与处理等功能。通过CAN(EVBUS)线协 调电池管理系统、电机控制器、空调系统等模块相互通信。
7
驾驶员意图解释 对驾驶员操作信息及控制命令进行分析处理,也就是将驾驶员的 油门信号和制动信号根据某种规则,转化成电机的需求转矩命令。 因而驱动电机对驾驶员操作的 响应性能完全取 决于整车控制的 油门解释结果,直接影响驾驶员的控制效果和操作感觉。
驱动控制 根据驾驶员对车辆的操纵输入(加速踏板、制动踏板以及选档开 关)、车辆状态、道路及环境状况,经分析和处理,向VMS发出相应 的指令,控制电机的驱动转矩来驱动车辆,以满足驾驶员对车辆驱 动的动力性要求;同时根据车辆状态,向VMS发出相应指令,保证安 全性、舒适性。
第四章
故障分级及处理方式
18
基于CCP的在线匹配标定 主要作用是监控ECU工作变量、在线调整ECU的控制参数(包括MAP、 曲线及点参数)、保存标定数据结果以及处理离线数据等。完整 的标定系统包括上位机PC标定程序、PC与ECU通讯硬件连接及ECU 标定驱动程序三个部分。
第四章
故障分级及处理方式
电 动 汽 车 培 训 之 一
天津市优耐特汽车电控技术服务有限公司
讲师:优耐特汽车电控·王征
01 整车控制器硬件 02 第二代整车控制器功能 03 整车控制器功能介绍 04 故障分级及处理方式
教学课件1.2 整车控制系统组成认知
学习单元1.2整车控制系统组成认知
理论知识
整车控制系统的功用与组成
吉利帝豪EV450纯电动汽车 整车控制系统的组成
电动汽车的整车控制
学习单元1.2整车控制系统组成认知
理论知识
整车控制系统的功用与组成
1.新能源汽车控制系统
帝豪EV450整车控制系统是基于动力网P-CAN总线的 多个控制系统的集成系统,以整车控制器(UCV)为管 理核心,主要负责汽车高压部件工作,实现对电池管理 控制、电机控制、充电控制、电子换挡器、远程控制系 统、减速器控制系统等。
学习情境1 整车控制系统认知
学习单元1.2 整车控制系统组成认知
学习单元1.2整车控制系统组成认知
学习 导航
1 情境导入 2 学习目标 3 理论知识 4 实践技能 5 学习小结
学习单元1.2整车控制系统组成认知
情境导入
作为一个汽车修理工,在汽车故障排 除时,要对汽车进行整车状态参数读取, 请问你会正确使用故障诊断仪进行数据流 读取吗?
电机控制器还能够实时进行电机状态故障检测,以保护 驱动电机系统和整车安全可靠运行。
学习单元1.2整车控制系统组成认知
理论知识
5.减速器控制
驾驶员操作电子换档器进入P档,电子换档器将驻车请求 信号发送到整车控制器(VCU),VCU结合当前驱动电机转速 及轮速情况判断是否符合驻车条件。
当符合条件时,VCU发送驻车指令到TCU,TCU根据驻车条 件判断是否进行驻车,TCU控制驻车电机进入P档,锁止减速 器。驻车完成后TCU将收到减速器发出的P档位置信号,并将 此信号反馈给VCU,完成换档过程。
理论知识
当直流充电设备接口连接到整车直流充电口,直流 充电设备发送充电唤醒信号给BMS,BMS根据动力电池 的可充电功率,向直流充电设备发送充电电流指令。
知豆整车培训资料

知豆纯电动汽车整车控制系统培训 所
指 结 构 是 什 么 ?
纯电动汽车概述
箭
纯电动汽车
头
动车EV轮: 行(E驶le,ct符ri合c 道Ve路hi交cl通e)、是安指全以法车规载各电项源要为求动的力车,辆用。电机驱所
➢可最大幅度减低燃油消耗和改善排放;
指
➢是近期和未来节能与新能源汽车发展战略的主流。
箭
头 简写 所 指 MC
VMS
BMS 结
构 DC/DC 是 Charger
ICU 什
BCM 么 ? GPRS/GPS
EPS
主要内容
箭
头
1
知豆电气系统简介
所
2
仪表显示
指
结
3
驾驶操作
构
4
充电维护与注意事项
是
什
5
实车讲解
么
?
1 知豆电气系统简介-整车概述
箭
头
整车尺寸2765 x 1540 x 1555
环境温度
-30℃~60℃
是
抗振等级 防护等级
符合SAEJ1378要求 IP66
什
冷却方式
自然冷却
么
噪音
重量
≤50dB
7.5Kg
重量
2Kg
?
尺寸
277*235*95
尺寸
349*195*139
知豆车载充电机/DC-DC
箭
DC功能:
头
1、实现电压变换(72V转12VDC) 2、稳定输出(13.8VDC-14.2VDC)
电池箱
知豆动力电池系统结构——电池箱
箭
电池箱
头
所
功能:
整车硬件在环(HIL)测试系统软硬件介绍 ppt课件
ppt课件
CAN接口多,其它接口较少 电源:20W,6-40V 温度范围:-40-85摄氏度 良好抗震性,体积小
8
• 系统软件组成
MATLAB
SIMULINK
RTW
RTI
dSPACE 工具
• 分析,设计, 优化
• 离线的数据处理
RTW设置界面
代码编译
代码编译
周期
时间 数值计算方法
选择对应的 编译方法
ppt课件
生成*.sdf文件
Block reduction 设置为“Off”
16
• 一些注意点
• Simulink中的“Fcn”模块不能使用
• 其它工具箱中的模块多不能使用(DSP工具 箱中的“Filtering”模块可用)
• 仿真参数设置窗口中的“Block reduction”一 定设置为“Off”
• 串口
ppt课件
13
• RTI的设置(ADC模块为例)
I/O物理接口
模块功能
查手册 使用Help文档
ppt课件I/O特性 设置界面的参数描述 14
• RTI的设置(ADC模块为例)
12
6
A B
3组共6个50针接头
17
1
c
ppt课件DS1401接头
50
34
DS1103接头15
• RTW的设置及代码自动生成
ppt课件
6
• DS1103控制板
PowerPC 604e
主机接口
16M全局 SDRM
全局总线
全局总线
2M局部 2通用 RAM 定时器
Hil在汽车整车测试及开发系统中的应用
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
③
① 控制器输出状态 ② VCU报文输入 ③ VCU报文输出
02
系统运行实况
PART
02
现场介绍及培训
PART
02
现场介绍及培训
PART
02
现场介绍及培训
PART
测试用例1
VCU上电过程测试
03
VCU上电过程测试
PART
ACC上电
ON上电
START启动1s
踩刹车并换D档, 松刹车,换档完成
01
整车控制器基本功能与用途
PART
接收、处理驾驶员的驾驶 操作指令,并向各个部件 控制器发送控制指令,使 车辆按驾驶期望行驶
与 电 机 、 DC/DC 、 BMS 等 进行可靠通讯,通过CAN 总线进行状态的采集输入 及控制指令量的输出
接收处理各个零部件信息, 系统故障的判断和存储,
结合BMS单元提供当前的 动态检测系统故障信息,
汽车集团整车 控制器HIL实
例介绍
待测控制器介绍
****整车控制器概况
80PIN
22路DI 6路AI 2路Can 23路DO 3路AO 4路PWM
01
PART
01
整车CAN通信网络拓扑结构
PART
数字仪表
BMS
监控终端
CAN Bus 2
车身CAN
CAN Bus 1
电机 控制器
转向助力 油泵
动力CAN
为16s
车辆的最高速度除了受到驱动力和负载阻力的限制,还受到整车控制器发给 电机控制器指令报文(0xCFF08EF)的转速正值限制。目前电机工作在转矩模 式,通过该转速正值,限制电机的最高转速,同时限制车速。当为满载质量 时,最高速度是由转速正值限制,此时整车控制器发出的指令转矩是260Nm, HIL模型计算得到的电机的实际输出转矩130.3Nm,在该转矩下,电机转速保 持在3800rpm。
在simulink中搭建整车动力学模型,如下图
02
PART
②
通过NI工具包将simulink模型导成 .dll文件,最终导 入PXI机箱运行
软件界面介绍(主界面)
③ ②
02
PART
①
① 实验模型控制 ② 整车控制输入 ③ 仪表显示 ④ 故障报警 ⑤ 整车综合信息
④
⑤
软件界面介绍(副界面)
②
02
PART
档位位于D档
04
测试过程
PART
①
输入加速踏板到最大值,电压达到4.2V
观察整车控制器发给电机控制器指令报文
②
(0xCFF08EF)的指令转矩值,可以观察到当车速
为0时,指令转矩值为520Nm
③
整车动力学模型根据收到的指令转矩,计算得到驱
动电机的实际输出电磁转矩
测试过程
④
车辆加速,在前面板可以实时观测车速,电机转
(0x10242E27) 的 启 动 命 令为置1,即启动 ③ 仪表板READY灯亮 ④ 电机控制器启动输出灯亮
① 电机控制器控制指令报文 (0xCFF08EF) 的 控 制 模 式 位置2,即电机转换为转矩 模式,车辆准备就绪,可 以运行。
测试用例2
满载最高时速测试
04
已知参数
PART
参数名称 01 满载总质量 02 空载总质量 03 减速器速比 04 设定机械传动效率 05 设定车辆轮半径 06 设定车辆迎风面积 07 设定车辆风阻系数 08 设定车辆行使摩擦系数(100km/h)
符号
m mk iz ηt r area Cd fk
数值
4460 3100 5.1 0.9 0.365 4.6 0.45 0.014
单位
kg kg
m m^2
04
测试系统初始状态
PART
HIL
VCU和HIL 连接正常
VCU系统 上电正常
D N R
整车控制器发给电机 控制器指令报文
(0xCFF08EF)的电 机控制器使能位为1
重大故障状态:VCU报警(紧急情况采
用紧急呼叫指令通知其他节点),必要
时切断主继电器电源,系统停车
VCU采集油门踏板信号,控制电机控制
②
器输出转矩,同时限制电机的最高转速,
最高车速限制为100km/h,主减比5.1,
轮胎半径360mm
ON断开:根据当前状态,进行电机负载
④
卸载;卸载后断开各高压回路;复位高
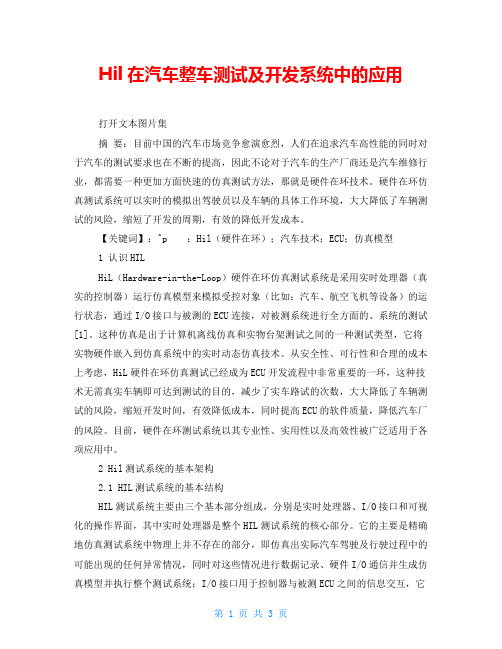
PXIe主机控制器
2.3 GHz四核Intel Core i7 内存8GB
PXIe-6356模块
8路同步AI 16位分辨率 250kS/s采样率
PXIe-6363模块
32路DIO 10MHz频率
PXI-8513模块
双路CAN 高低速兼容
整车simulink模型
①
速等数据,如下图所示
04
PART
测试过程
⑤
得到车辆的加速过程速度时间曲线
如下图所示
04
PART
测试过程
随着车速升高,整车控制器发出的指令转矩减小,整车控制器发出的
⑥
指令转矩和实际车速的关系如下图所示。记录该转矩和转速的关系并
绘制曲线,判断该曲线是否合理
04
PART
04
测试过程
PART
⑦
HIL测试得到结果:最高车速为80Km/h,加速时间
压故障诊断;保存故障代码、行驶参数
等;最后断开低压自保控制
系统结构介绍
02
机柜总成结构
PART
供电箱及开关 工控机 PXI机箱 适配器
信号调理箱 负载箱
02
操作台结构
PARTΒιβλιοθήκη 挂板 待测控制器 接线导轨
操作台 上位机界面
02
硬件组成介绍
PART
PXIe-1082机箱
4个混合插槽 3个PXI Express插槽 每插槽1 GB/s的带宽
① 低压上电 ② 整车控制器收发报文 ③ HIL可以实时收发并显示报
文
① 低压自保输出 ② 电机控制器启动 ③ 预充电开始 ④ DC/DC接触器线控输出 ⑤ 待预充电完成后主接触器
吸合 ⑥ DC/DC使能控制 ⑦ 电机控制器准备就绪灯亮 ⑧ 动力系统准备就绪灯亮
① 转向助力泵控制 ② 油 泵 DCAC 控 制 报 文
能源状况信息,实现整车 记录出现的故障,并依据
驱动控制、能量优化控制、 故障的级别对整车进行分
制动回馈控制和网络管理 级保护,如降额输出,紧
等功能
急情况直接切断动力
协调管理其他车载电器设备
01
整车控制器基本控制策略
PART
ACC上电,整车低压设备进行自检
①
ON上电,VCU输出低压自保控制信号,
对高压上电设备进行故障监测和诊断,
如无故障则主接触器吸合,启动高压辅
助系统控制逻辑
START启动(1s以上):开启电机控制器、
转向助力泵控制逻辑,无故障报警则点
亮绿色Ready灯
一般故障状态:VCU检测到一般故障,
③
整车控制器报警(报警灯闪烁、通过
CAN总线发送相关的报警信息,通知其
他的节点),整个系统降级运行。