雷尼绍检查规
雷尼绍探头设定及使用
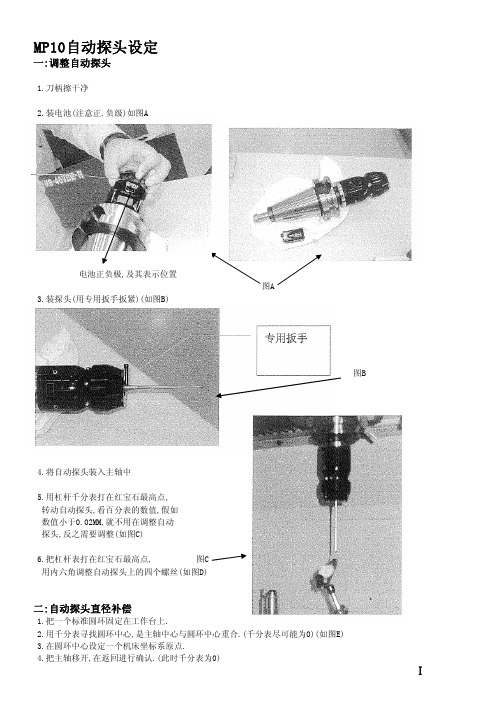
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。
雷尼绍对刀仪使用培训教程

校正
手动刀长测量
测量
自动刀长与刀径 测量
刀具破损检测
对刀仪探头坐标位置校正(O9855)
• 以手动方式将一已知长度的基准刀移到探头上方约 10mm 位置,并尽 量使刀具中心与探头中心成一直线
G65 P9855 D12.7 R8. T100;
基准刀的刀号
探头盘面直径 基准刀直径
探头坐标位置校正(O9855)
• O9858 可对刀具进行破损检测,参数H以设定破损量公差值(双向公差) G65 P9858 D10. T6. H0.05;
D:刀具直径 H:损量公差值(预设值0.5mm)
精品文档 欢迎下载
读书破万卷,下笔如有神--杜甫
G65 P9857 Bb [Dd Tt Qq Hh Zz M1 ] [ ]可选参数
自动刀长与刀径测量(O9857)
例:指定B1执行自动刀长测量,已将粗略刀长值输入目标刀具号
G65 P9857 B1 T3 D10. Q6.;
T:更新目标刀具号 D:刀径的粗略值 Q:过行程距离
具破损检测 (O9858)
刀具破损检测o9858ts27r使用培训校正测量手动刀长测量自动刀长与刀径测量刀具破损检测以手动方式将一已知长度的基准刀移到探头上方约10mm位置并尽量使刀具中心与探头中心成一直线对刀仪探头坐标位置校正o9855g65p9855d127r8
雷尼绍对刀仪TS27R使用培训
• 对刀仪探头坐标位置校正(O9855) • 手动刀长测量(O9856) • 自动刀长与刀径测量(O9857) • 刀具破损检测 (O9858)
• 完成校正后,相关数值会储存在以下变量
变量号 #520 #521 #522 #523 #524 #525 #526
雷尼绍无线电测头安全操作及保养规程

雷尼绍无线电测头安全操作及保养规程雷尼绍无线电测头(以下简称“测头”)是一种高精度电子测试设备,广泛应用于电子工程和机械工程领域的测量和检测中。
测头具有高灵敏度、高精度、高速度等特点,在使用时需要严格遵守一系列操作规程,以确保仪器正常运行、检测数据准确。
本文将阐述雷尼绍无线电测头的安全操作及保养规程。
1. 安全操作规程1.1 选用适当的测量范围和放大倍数在进行测量之前,要根据实际需求和测量环境选择合适的测量范围和放大倍数。
如果选择不当,会导致数据不准确、测头损坏等问题。
建议在使用前仔细阅读测头的说明书,了解仪器的技术参数和性能特点。
1.2 正确连接设备和测量电路在测量过程中应严格按照说明书的操作步骤进行,确保设备和测量电路的正常连接。
如若操作不当,可能会对测头造成损坏。
建议在连接设备和测量电路前检测设备和电路的状态,确保它们的可靠性。
1.3 防止测头受到电磁场干扰在使用时,应尽量避免测头受到电磁场的干扰。
如若遇到干扰,建议在调整测头放大倍数或者调整测量方向等方面进行调整,以保证数据的准确和仪器的正常运行。
当使用测头时,请保持周围的环境干净、整洁,降低电磁场、尘埃等物质对设备的影响。
1.4 避免测头受到机械力、振动等影响雷尼绍无线电测头是一种高精度的测试设备,容易受到机械力、振动等影响。
在使用测头的时候,请避免使用过于粗暴的操作方式,确保仪器的稳定性和准确性。
建议在使用前检查相应的支架、夹具等固定设备,以确保会有机械力、振动等因素对设备的影响。
1.5 避免测头受到静电干扰在干燥的环境、静电场较强的场合中,很容易使测头受到静电干扰。
因此,在使用时应使用导电的手套和地线等设备,以减小静电场对设备的影响,并确保安全操作。
1.6 保持测头干燥、清洁雷尼绍无线电测头本身是一种高精度、高灵敏度的设备,它的工作原理需要在低噪声环境中进行。
如果在遇到潮湿、不干净的环境,将会在极大程度上影响设备的使用寿命和准确性。
英国雷尼绍先进机床精度检测技术-1130
英国雷尼绍先进机床精度检测技术来源:数控机床网 作者:数控车床 栏目:行业动态 在您的机床制造精密零件之前,事先知道它能否为您生产出好的零件是极其重要的。
这对于减少废品数目和机器停工时间非常有效。
已经有许多企业认识到这一点,他们已开始广泛采纳国际标准ISO230、美国ASME B5.54 机床标准或中国.B标准来保证数控机床能“健康”地工作,从而提高生产率。
1 数控机床常见精度要求及传统检测方法几何精度包括直线度、垂直度、平面度、俯仰与扭摆和平行度等。
传统方法采用大理石或金属平尺、角规、百分表、水平仪、准直仪等工具,由人工操作,手工记录数据与计算,精度低,多用于小型机床。
位置精度数控机床位置精度包括定位精度、重复定位精度和微量位移精度等。
传统方法采用金属线纹尺或步距规、电子测微计和准直仪等工具进行测量。
当机床规格稍大时,传统方法其相应的标准器件很重,且精度太低,受环境温度的影响大,其检验方法极冗长乏味,检验重复性也很差,难以反映受检机床的真正精度。
数据处理必须手工进行,繁琐、易出错。
工作精度美国NAS(国家航宇标准)979在20年前就制订了标准化的“圆形—菱形—方形”试验(现在是CMTBA的标志)。
实施时,要准备铸铁或铝合金试件、铣刀及编制数控切削程序。
用高精度圆度仪及高精度三坐标测量机检验试件精度。
该方法需要仔细定义试件的切削方法和测量切削结果,它可能要花几天时间,而且依赖于计量室的条件。
2 新技术实现了老的想法对任何工厂来讲,购买数控机床都是一笔相当可观的投资。
因此,使数控机床设备在生产中发挥中坚作用,尽快回收成本是至关重要的。
一般来说,在零件加工完毕后发现机床加工质量问题,常常为时已晚。
对负责车间效率的人员来说,理想的解决办法是在工件加工前对机床性能进行检验。
雷尼绍ML10激光干涉仪和QC10球杆仪为实现该目标提供了强有力的工具。
检定机床性能并非一种新想法,它只是没有实用化。
美国NAS(国家航宇标准)979无法评估机床的所有性能。
雷尼绍测头安全操作及保养规程
雷尼绍测头安全操作及保养规程简介雷尼绍测头是一种常用的测量工具,广泛应用于机械制造、电子制造等领域。
在使用过程中,为了保证使用人员的安全以及保养测头,有必要了解和掌握雷尼绍测头的安全操作及保养规程。
本文将从以下几个方面进行介绍:1.雷尼绍测头安全操作规程2.雷尼绍测头保养规程3.雷尼绍测头维修及更换部件流程雷尼绍测头安全操作规程1. 了解测头操作原理在操作测头之前,首先需要了解测头的测量原理以及使用方法。
在使用过程中,应按照测头的说明书,正确的连接、调整以及使用测头。
负责操作测头的人员必须具备相关技能和经验,以确保测量结果的准确性和稳定性。
2.正确连接测头在连接测头时,必须确保连接到正确的接口,避免接错线或接错位置。
在连接电缆时,应确保电缆插头与测头插座连接牢固,防止出现松动等情况。
3.使用绝缘手套在使用测头时,应穿戴绝缘手套等安全防护用品。
这样可以防止电击,并有利于提高操作人员的安全性能。
4.正常使用测头在使用测头时,应避免受到外界干扰,如电磁场干扰等。
避免使用测头使用在高功率电源附近或高频电源附近。
在使用测头过程中,注意其它同步传感器、电源线、信号线的布线和干扰的防护。
5.避免毁坏保护套雷尼绍测头的保护套是保护测头的一个很重要的组成部分,必须小心使用,避免损坏。
同时,要避免过度压弯或进行其它过度操作,避免造成保护套裂纹和变形等情况。
6.使用期满后要更换在使用一定的时间后,测头可能会发生过度老化或电器故障等情况。
为了避免影响测量结果,使用人员应自行或送回维修中心更换测头。
雷尼绍测头保养规程1. 测头外观清洁测头在使用过程中,会沾染灰尘、油污或其它物质,因此需要在使用结束后及时清洗外观。
使用干净的干净抹布或清水擦拭测头,避免使用化学剂之类的刺激性清洁剂。
2. 保持测头干燥雷尼绍测头是灵敏的电器元件,因此,在长时间停放时,应注意保护测头的电气性能。
保持测头的干燥对于保护测头的寿命和使用效能是很重要的。
雷尼绍刀长对刀仪安全操作及保养规程
雷尼绍刀长对刀仪安全操作及保养规程1. 前言雷尼绍刀长对刀仪是一款高精度的检测仪器,经常被用于金属制品、电子制品、汽车及纺织品的质量检验和加工过程中的精度控制。
为了确保设备的正常使用和延长其使用寿命,使用者需要遵循一定的安全操作和保养规程。
2. 安全操作规程2.1. 仪器操作前准备在使用雷尼绍刀长对刀仪前,使用者需要做好以下准备工作:•仔细阅读说明书,确保对仪器的操作和使用方法有清晰的了解。
•检查设备是否完好无损,如有损坏或故障应立即停止使用,并及时联系售后服务人员进行维修。
•检查所有接口和电气连接是否稳固可靠,如有异常应及时报告和处理。
•加载和安装标准工件,并确保工件与刀头接触平面光洁无损,不得有凹槽和划痕等表面缺陷。
2.2. 设备操作步骤使用雷尼绍刀长对刀仪时,需要按照以下步骤进行操作:1.打开电源并将仪器预热10-20分钟。
2.通过调整刀头高度,使其与标准工件接触,调整至最佳接触状态。
3.启动设备进行测量,并记录相关数据。
4.停止测量,关闭设备并拆卸工件。
2.3. 注意事项使用过程中需要注意以下事项:•仪器不得受到撞击、振动和震动,应尽可能避免将仪器置于潮湿、高温或有腐蚀性的环境中。
•使用中应保持工作环境清洁整洁,避免异物和尘土进入设备内部。
•禁止手动干预刀头与标准工件的接触状态,避免刮伤刀头表面。
•禁止拆卸、改装和私自修理仪器,请咨询专业售后服务人员进行处理。
•使用过程中如发现异常声响或其他问题应立即停机,并检查问题原因。
3. 设备保养规程3.1. 日常保养日常保养主要包括以下方面:•定期对设备进行清洗和除尘,保持设备清洁。
•定期检查设备电源线,电气接口等是否松动或磨损,及时更换或维修。
•定期检查仪器标准工件表面的凹槽、磨损和氧化情况,如有异常应及时更换。
3.2. 定期维护定期维护主要是针对设备所使用的零部件和润滑油进行更换和维护,频率和方法如下:•定期更换在使用过程中磨损的零部件,例如测量刀头,滑动轨道等,具体更换频率视使用情况而定。
雷尼绍测头使用经验总结

//优先级别:红、绿、蓝、黑1.测头刀长有补偿路径时需要将测头刀长设为基准刀长,且测头刀长不能虚设必须为其实际刀长。
由于测头不能在对刀仪上进行对刀,要想利用已知的刀具长度进行计算,只需要在同一个基准面上进行对刀,得到的Z向原点差值即为刀长之差。
1.在刀具设置中将“对刀基准与对刀仪原点间距”和“机外对刀刀长换算参数”清零;2.使用测头在工件表面对刀,记下机床坐标Z1;3.换刀,用一把加工刀具在工件表面同样位置对刀记下机床坐标Z2;4.对刀设为当前刀具刀长,并在刀具设置中记下刀长Z35.测头刀长=Z3-(Z2-Z1);一般测头比加工刀具长,所以算出的测头刀长的绝对值小于加工刀具刀长的绝对值。
在45系统T213版本的升级说明中给出了刀具参数的设置流程,有些同事只知其然,不知其所以然,其实只要理解了刀具长度的换算关系,不止一种方法可以得到测头刀长。
2.测头使用过程中常见的异常报警1)b08-c:12位扩展输入信号暂停。
可能是测头信号设置错误、接收器被遮挡、在移动过程中碰到障碍物或者电量不足。
测头电量不足时,马波斯测头信号灯黄橙闪烁,雷尼绍测头蓝绿或蓝色闪烁。
2)310-0:碰触过程中没有发现任何信号。
需要修正测量点位置或者增大探测距离,目前45系统中允许的最大探测距离为40mm。
3)313-100:碰触回退后信号未消除。
说明回退距离太小或者搜索速度过大,两者之间的数值关系应为:回退距离=搜索速度/2+0.05。
一般建议首次测量速度不小于0.4mm,45系统中默认的是两次触碰模式,即先以搜索速度碰触到工件后再回退一段距离,然后以准确测量速度进行探测,第二次触碰到的位置才会保存在测量结果中;使用单次触碰模式可以提高探测效率,但测量精度会下降,可在一些对测量精度要求不高的情况下使用。
4)311-0:测头信号异常。
需要确认当前测头状态是否正确。
5)路径类型与刀具类型不符。
探测路径使用的刀具必须与设备参数设置里接触式测头设置的占用刀位一致。
雷尼绍探头使用指南(二)(2024)
引言:雷尼绍探头是一种广泛应用于科学研究和工程领域的设备,其使用可以帮助我们测量和探测各种物理和化学量。
本文旨在为使用雷尼绍探头的用户提供一份详尽的指南,以帮助他们更好地理解和使用这一设备。
概述:雷尼绍探头是一种用于测量和探测电磁场、温度、湿度等物理和化学量的设备。
它由一个探头和一个接收器组成,通过探头与被测物理量进行相互作用,然后通过接收器将获取的信号转换为可读的数据。
使用雷尼绍探头时需要注意一些关键的操作步骤和技巧,以确保测量结果的准确性。
正文内容:一、正确连接探头和接收器1.检查探头和接收器的连接接口,确保接口干净无杂质。
2.将接收器与电源和数据采集设备连接,确保接收器能够正常工作。
二、探头的校准和调试1.在使用雷尼绍探头前,需要对其进行校准,以确保测量结果的准确性。
2.根据探头的说明书,选择合适的校准方法和设备进行校准。
3.在校准过程中,注意细节,并记录下校准结果。
三、选择合适的测量参数1.根据被测量的物理量,选择合适的测量参数,如信号频率、采样率等。
2.在选择参数时,考虑被测量物理量的特性和探头的灵敏度,以保证测量结果的准确性。
四、使用探头进行实际测量1.在进行测量前,需要对被测量物体进行准备工作,如清洁、固定等。
2.将探头与被测物理量相互作用,并保持探头与被测物体的接触良好。
3.在测量过程中,注意探头的位置和动作,以避免误差的产生。
4.需要注意的是,在进行测量时,可能会受到外界环境的干扰,如电磁场、温度等,这些因素需要进行合理的控制或校正。
五、数据分析和解释1.测量完成后,将得到的数据进行分析和解释,以获取有意义的结果。
2.根据测量结果,可以进行数据处理、曲线拟合等操作,以进一步分析和解释测量数据。
3.在数据解释过程中,还需要考虑测量过程中的误差来源和对结果的影响。
总结:雷尼绍探头作为一种广泛应用的测量设备,使用正确的操作步骤和技巧可以提高测量结果的准确性。
本文从连接探头和接收器、探头的校准和调试、选择合适的测量参数、使用探头进行实际测量以及数据分析和解释等方面进行了详细阐述。
测头同款雷尼绍安全操作及保养规程

测头同款雷尼绍安全操作及保养规程前言测头同款雷尼绍(Renishaw)是一家全球范围内的先进精密测量解决方案供应商,其中常用的测头同款雷尼绍产品是用于协助机器人进行三维建模和有机物结构的定位和测量的机械设计设备。
由于测头同款雷尼绍设备的工作频率和形态,其使用时需要遵守严格的安全操作和保养规程,以确保设备的稳定性和准确性。
本文将详细介绍测头同款雷尼绍的安全操作和保养规程,帮助用户正确使用和维护该设备。
安全操作规程以下是测头同款雷尼绍的安全操作规程:1. 电气检查在使用测头同款雷尼绍设备时,必须进行电气检查以确保设备的电气功能正常。
在检查过程中,应首先关闭电源并检查电线是否损坏或磨损。
如果发现电线有损坏或磨损的情况,应立即更换。
同时,在使用设备时,应使用扁平电线或绝缘套管保护电线。
2. 稳定平台在进行测头同款雷尼绍设备的测量前,应确定使用设备的平台是稳定的。
沉重的物体会产生额外的振动和分散测头同款雷尼绍装置的稳定性,因此应尽量避免在同一平台上同时放置物品。
另外,在操作时,应避免在测量区域内行走或操作其他设备。
3. 物体识别在有效测量期间,操作人员不得靠近测头同款雷尼绍装置及周边设备。
该设备可以识别机器人内的对象,避免误伤工作人员,但操作人员仍需保持足够的距离以确保安全。
另外,在使用设备之前,必须确保能够清楚地看到实验环境,包括周边障碍物和目标物体。
操作人员不得使用该设备时看到虚像或者发生其他误操作。
保养规程测头同款雷尼绍设备的保养规程如下:1. 定期清洗在长时间使用后,测头同款雷尼绍装置会积聚大量尘土和污垢,影响测量精度。
因此,在使用过程中,应定期清洗设备以确保其工作良好。
首先,应关闭电源并使用干布轻轻擦拭设备的外表面。
接着,可以使用柔软的刷子和酒精溶液清洁设备的细节部分。
注意:绝不能使用化学物质或水进行清洁,以免损坏设备的电路。
2. 油润滑在设备使用期间,应定期对轨迹部件和电路进行适当的油润滑。
应遵守设备制造商的指南,使用相应的润滑剂。
雷尼绍测头测针安全操作及保养规程

雷尼绍测头测针安全操作及保养规程雷尼绍测头测针是一种常用于电气和电子工程领域中测试电路元件的精密测量仪器,正确的使用和保养对于保证测试准确性及仪器寿命至关重要。
本文将介绍雷尼绍测头测针的安全操作和保养规程,以便用户能够更好地使用和保护这一重要的测量仪器。
一、操作规程1.1. 基本原则•在使用雷尼绍测头测针之前,请务必仔细阅读说明书并按照说明书进行操作。
•负责操作测针的人员必须具备相关的电气、电子测试知识和操作技能,以免发生意外事故。
•操作时必须佩戴符合要求的安全防护用品,如绝缘手套、绝缘鞋等。
•进行测量时,必须严格遵守电源和电路的安全规定。
1.2. 测试前的准备工作•首先检查测量仪器的电源是否与电路连接正确,并确保电路处于断电状态。
•检查测量仪器本身是否处于正常工作状态,包括指针和电缆是否损坏、脏污等,如果发现问题,请进行维修或清洁。
•选择合适的测试范围,避免电流和电压超过仪器能够承载的范围。
•如果需要进行高压测试,请使用高压测试仪进行测试,雷尼绍测头测针并不适用于高压测试。
1.3. 测试操作步骤•将测试针头与测试台连接,确保连接牢固。
•打开电源,将测量仪器调整到合适的测试范围。
•将测试针头轻轻地接触被测试的电路元件,然后读取测试结果。
•测试完成后,一定要清洁测针,特别是测针头部分。
1.4. 注意事项•在操作雷尼绍测头测针时,请注意电流和电压的范围,避免超过仪器额定值。
•操作时不能把人体接地端或器材的接地端,接到带电电位上。
•操作时如果发现异常情况,请立即停止测试,排除故障后再进行测试。
二、保养规程2.1. 日常维护•操作前将测试针头清洁干净,以免测量结果出现误差。
•定期进行外观检查,如检查电缆和插头是否完好、外观是否干净,如有问题及时修复。
•测量过程中,不要将测试针头存放在粘有脏污的位置或者触摸污染的手面。
2.2. 定期保养•每隔一段时间开盖清洗仪器内部,清除脏污和灰尘,特别是测试头部分。
•定期校准测量仪器,确保测试结果的准确性。
雷尼绍使用手册
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
雷尼绍测头袖珍指南说明书
CNC 工具機測頭袖珍指南解決方案提升工件品質和精確度,提高 加工中心機的效率CNC 工具機測頭解決方案...袖珍指南內容本袖珍指南完整地介紹了 Renishaw 公司為 CNC 工具機而設計的主要產品,協助您加瞭解測頭量測可以為您帶來的營運效益。
“使用 Renishaw 公司提供的創新解決方案,可以縮短最多達90%的 設定時間”為什麼要使用測頭? 1使用 Renishaw 測頭量測系統的預期效益 3工件設定工件檢測刀具設定和破損刀具檢測功能強大的 PC-based 工件量測軟體支援巨集程式之測頭量測軟體產品/應用指南 5為什麼要使用測頭?時間就是金錢。
與其花時間人工手動設定工件位置和檢驗成品尺寸,不如將時間花在加工工作上。
Renishaw 測頭量測系統,可消除因手動設定及檢驗所造成的代價高昂的機器停機和工件報廢。
機器只有在持續生產良好品質的工件下,才是在創造利潤。
你有因停機而無法獲利的問題嗎?為什麼你大部分的機器會閒置達數小時?道理很簡單。
因為許多公司仍然使用人工手動方式來設定刀具和工件,並且使用機外檢驗的方式來進行加工成品尺寸之檢驗 — 兩者都是造成寶貴設備閒置的重要因素。
減少停機時間和廢品 — 增加機器加工時間和工件精度手動刀具設定、工件設定和檢測既耗時,又容易產生人為疏失。
直接在線上進行測頭量測,便不需要再使用外部的刀具設定儀、昂貴的夾治具和以槓桿千分錶進行手動設定。
線上測頭量測既快速且可靠,並且可以自動補正機械座標偏移量。
測頭量測軟體會自動對刀具長度和直徑、工件位置以及尺寸誤差進行補償。
Renishaw公司配備功能強大的套裝軟體,使用容易編輯的巨集程式進行刀具設定、工件設定和工件量測。
這些測頭量測循環程式,係依據工業標準格式編輯而成,可簡單地整合到加工程式中,並可使用標準機器程式代碼來呼叫使用。
Renishaw 公司的測頭普遍為世界各地的公司所採用,作為提升生產效率和改善工件品質的方法。
雷尼绍 H-5514-8204-01-A OTS光学对刀测头 规格手册

弱保护组件
A-5003-5171
测针保护组件包括:弱保护杆 (x1)、柔性连接片 (x1)、支撑杆 (x1)、 M4螺钉 (x2)、M4锁紧螺钉 (x3)、六方扳手:2.0 mm (x 1)、3.0 mm (x 1) 和扳手5.0 mm (x 1)。
测针架组件
A-2008-0389
测针架组件包括测针架和螺钉。
½ AA电池
P-BT03-0007
两节装½ AA锂亚硫酰氯 (LTC) 电池。
AA电池
P-BT03-0005
1节AA碱性电池(需要两节)。
AA电池
P-BT03-0008
½ AA锂亚硫酰氯 (LTC) 电池 -(两节装)。
电池盖
A-5401-0301
OTS电池盖组件。
密封条
A-4038-0301
电池座密封条。
光学传输开启模式
OTS的出厂设置为测头2(主轴测头的出厂设置为测头1)。
接口兼容性
OMI-2T/OMI-H 测头1和测头2开启。 允许一台机床上配两个测头。
OMI-2
测头1开启。 允许一台机床上配一个测头。 使用OMI-2时,将OTS配置为测头1开启。
在调制模式下OTS可与OMI-2T/OMI-2H/OMI-2兼容,具有很强 的抗光干扰能力。
如果对面的锥形光束总是重叠,而且发射器和接收器在其他的 视场(瞄准线),OTS和OMI-2T/OMI-2H/OMI-2可能会偏离光 学中心线。
机床上的自然反射面可能扩大信号传输范围。
注:单个OTS(配置为测头1)可配用 OMI-2(配置为使用水平开启输入)
45°
30°
15°
60°
75° 5 4 3 2 1
OTS (½ AA电池)
雷尼绍激光干涉仪安全操作及保养规程
雷尼紹激光干涉仪安全操作及保养规程1. 前言雷尼紹激光干涉仪是一款利用激光干涉原理进行测量的仪器。
在使用过程中,为了保证操作人员的安全以及仪器的正常运行,需要遵从以下安全操作及保养规程。
2. 安全操作规程2.1 保护眼睛激光干涉仪使用时产生的激光具有一定的强度和能量。
长时间暴露于激光光束中会对人眼造成损伤。
因此,使用雷尼紹激光干涉仪时必须戴上专业防护眼镜或其他形式的眼睛防护器材。
2.2 防止触电雷尼紹激光干涉仪在使用时需要接通电源,因此需要防止触电。
为此,有以下注意事项:•在插拔电源时,一定要先关闭开关按钮,避免电器内部元件带电•在插拔电源时,不要懈怠使用保险套或者是带开关的插排等有保护装置的插头电器产品•使用雷尼紹激光干涉仪的开关按钮时,要轻按,以免产生损坏2.3 限制辐射使用雷尼紹激光干涉仪时,需注意避免将它放置在容易导致人体受辐射的地方,例如,要放置在防护隔离柜内等位置。
如果需要在较长时间内使用激光干涉仪,则需要额外进行辐射防护措施,以保护身体健康。
2.4 防区域污染使用雷尼紹激光干涉仪时,需注意过程中引起的尘埃、粉末、气体等物质都必须在特定的设备中包含并组织掉。
因此,在使用激光干涉仪时,切记不要使用自己的空气净化器、抽风机等电器产品来等效吸附粉尘,从而避免危及到健康。
2.5 注意造成噪声污染雷尼紹激光干涉仪本身的机械运动以及工作过程中会产生噪音,在使用激光干涉仪时,要注意避免过分且长时间在其附近活动或工作,特别是工作人员,更不能将装饰品放在其周边影响工作人员安全使用。
2.6 防因工具失控引起安全问题雷尼紹激光干涉仪本身是一款高精度的仪器,其传感器和传感器各组成部分都非常精细,任何物体的碰撞都会对其造成较大的损害。
因此,在安装、调试和使用激光干涉仪时,要保证操作人员对其环绕物体以及操控工具的掌握,以确保工作人员的操作精准且有序。
也可以提前进行准备工作,安装一些防护罩和其他避免高压等故障的装备来保护雷尼紹激光干涉仪。
雷尼绍断刀检测安全操作及保养规程

雷尼绍断刀检测安全操作及保养规程雷尼绍断刀是一种常用于电气检测和维护的工具,具有很高的精度和敏感性。
为了确保使用过程中的安全和有效性,用户应该了解其正确使用方法和保养规程。
本文将介绍雷尼绍断刀的检测操作、安全操作和保养规程。
检测操作检查工具在使用雷尼绍断刀之前,应检查工具以确保它们处于良好工作状态,且不会影响测试结果。
下面是需要检查的一些方面:•外观:检查断刀的外观是否有裂缝、变形和破损等问题,如果存在问题,就需要更换或者修理;•电池:检查电池电量是否充足,如果电量不足,应当及时更换电池;•线缆:检查线缆是否损坏、折叠和紊乱,如果有问题,更换或修理线缆。
运用工具使用雷尼绍断刀的过程中有一些基本规则需遵守,以确保正确检测结果的准确性:•始终使用适当的电压范围进行测量。
将雷尼绍断刀与正确的电极端子相匹配,以得到准确的测试结果;•不要重复检测同样的示范,尝试以避免电器元件的损坏或者发生其他电气隐患;•时刻注意环境的恶劣情况,比如电势高峰、流过的电流和静电等情况。
安全操作使用雷尼绍断刀的过程中,用户应遵守下列安全操作规定:免负电静力用户在使用雷尼绍断刀时应避免充分暴露在电位高危险的情况下,在不必要的情况下不要触摸其他任何电气元件或导体。
###佩戴防护设备在进行电气安全检测时,用户应穿戴相应的防护设备。
一些关于防护设备的要求包括:•佩戴绝缘手套与绝缘鞋,确保你的皮肤及任何物体离电气元器件有一层隔绝层;•佩戴耳塞来保护耳朵免受噪音的影响;•使用特定的眼睛保护设备,以保护眼睛免受外界影响。
在工作过程中充分注意在使用雷尼绍断刀作业过程中,必须集中注意力,刻不容缓。
具体来说,应该做到以下几点:•关注结果,确保它们在预期电压水平范围内;•注意是否有可能引发电气隐患;•不要因好奇、工作越过头等原因冒着生命危险将雷尼绍断刀引导到不合适的设备上。
保养规程良好的工具保养才能确保工具的长期有效使用,雷尼绍断刀也是如此,在对断刀进行保养时需要注意以下事项:外部保养•防护套:不要让防护套接触到尖锐物体,防止损坏;•外层:保持外壳清洁干燥,避免长时间受潮、沾水。
雷尼绍干涉仪使用方法ML-80

一、本次我们主要研究:如何检测机床的螺距误差。
因此我们主要的任务在于:1.应该使用什么仪器进行测量2.怎么使用测量仪器3.怎么进行数据分析4.怎么将测量所得的数据输入对应的数控系统二、根据第一点的要求,我们选择的仪器为:Renishaw 激光器测量系统,此仪器检测的范围包括:1.线性测量2.角度测量3.平面度测量4.直线度测量5.垂直度测量6.平行度测量线性测量:是激光器最常见的一种测量。
激光器系统会比较轴位置数显上的读数位置与激光器系统测量的实际位置,以测量线性定位精度及重复性。
三、根据第二点的解释,线性测量正符合我们检测螺距误差的要求。
因此,我们此次使用的检测方法——线性测量。
总结以上我们的核心在于:如何操作Renishaw 激光器测量系统结合线性测量的方法进行检测,之后将检测得到的数据进行分析,最后将分析得到的数据存放到数控系统中。
这样做的目的在于——提高机床的精度。
第二章、基础知识2.1 什么是螺距误差?开环和半闭环数控机床的定位精度主要取决于高精度的滚珠丝杠。
但丝杠总有一定螺距误差,因此在加工过程中会造成零件的外形轮廓偏差。
由上面的原因可以得知:螺距误差是指由螺距累积误差引起的常值系统性定位误差。
2.2 为什么要检测螺距误差?根据2.1节,检测螺距误差是为了减少加工过程中造成零件的外形轮廓偏差,即提高机床的精度。
2.3 怎么检测螺距误差?(1)安装高精度位移检测装置。
(2)编制简单的程序,在整个行程中顺序定位于一些位置点上。
所选点的数目及距离则受数控系统的限制。
(3)记录运动到这些点的实际精确位置。
(4)将各点处的误差标出,形成不同指令位置处的误差表。
(5)多次测量,取平均值。
(6)将该表输入数控系统,数控系统将按此表进行补偿。
2.4 什么是增量型误差、绝对型误差?①增量型误差增量型误差是指:以被补偿轴上相邻两个补偿点间的误差差值为依据来进行补偿②绝对型误差绝对型是误差是指:以被补偿轴上各个补偿点的绝对误差值为依据来进行补偿2.5 螺距误差补偿的原理是什么?螺距误差补偿的基本原理就是将数控机床某轴上的指令位置与高精度位置测量系统所测得的实际位置相比较,计算出在数控加工全行程上的误差分布曲线,再将误差以表格的形式输入数控系统中。
雷尼绍XL-80激光校准仪说明书

D D
B A
B A
计算机
典型双轴设定
* 软件以光盘形式提供,包括以下语言:英语、德语、法语、意大利语、西班牙语、日语、简体中文、繁体中文、俄语及韩语。 6
用于实时动态分析的QuickViewXL™软件
实时显示线性位移、 速度和加速度分析的激光 测量数据。
QuickViewXL™软件
QuickViewXL™软件包简单易用,界面直观,它能 够采集、复现和保存来自雷尼绍XL-80激光系统的动态 数据。
雷尼绍使用其XC-80环境补偿单元和高精度环境传 感器对激光波长进行补偿。
XC-80补偿系统和传感器能够在整个系统工作范 围内保持精度。因此,在0 - 40 ºC及整个空气压力范围 内,可以保持±0.5 ppm的线性测量精度(参阅与同行系 统的图形比较)。
8
精度单位:ppm(百万分之一)
精度单位:ppm(百万分之一)
大多数激光测量中的最大不确定度是由环境条件 与标称值之间的差异引起的(空气温度、空气压力、 相对湿度),即使环境条件的微小变化也会改变激光 波长和相关测量读数。例如,下列变化会使激光波长 增加0.25 ppm(百万分之一):
空气温度升高0.26 °C 空气压力下降0.93毫巴
当空气温度、相对湿度、和空气压力与标称值之间 的误差影响组合到一起,可能导致20-30 ppm的测量不 确定度(即使测试条件保持稳定也不例外)。
其他同行厂家
雷尼绍XL-80
ºC 系统线性测量精度与环境温度
其他同行厂家
雷尼绍XL-80
ºC 10 ppm/ºC时的标准材料温度的归一化精度
系统优点
其他影响精度的因素
测量归一化
激光稳频精度 – 通过热控制技术将激光管长度变化控 制 在几纳米范围内,达到1年内精度为±0.05 ppm, 1小时内精度为±0.02 ppm。
雷尼绍探头安全操作及保养规程

雷尼绍探头安全操作及保养规程雷尼绍探头是一种用于测量温度和湿度的传感器,广泛应用于各种工业和实验室环境中。
本规程旨在指导用户正确使用和保养雷尼绍探头,以确保设备的安全性、可靠性和精度。
第一章:安全操作1.1 前置知识在使用雷尼绍探头前,用户需要了解以下关键知识:•温度和湿度的测量原理•各种传感器类型的区别和优缺点•探头的使用限制和技术规范•工业和实验室环境的安全标准和操作规程用户需要通过培训或自学获得这些知识,并在使用探头前检查设备和环境是否符合要求。
1.2 操作步骤1.打开探头包装箱,并检查探头是否完好无损。
2.安装探头,根据具体型号和使用场景选择合适的安装方式。
3.连接探头到测量设备,确保连接牢固。
4.对探头进行校准,校准方法请参照探头使用说明书。
5.开始进行温度和湿度的测量,记录数据并保留备份。
6.在使用完毕后,关闭设备并拔掉探头连接线。
1.3 注意事项•在使用探头前,必须确保设备和环境符合要求,以免影响探头的准确度和寿命。
•在使用探头时,必须严格按照使用说明书和技术规范操作,避免误操作和超出范围。
•在探头安装和使用过程中,必须严格遵守相关的安全标准和操作规程,确保人身安全和设备完整。
•在使用完毕后,必须及时关闭设备并拔掉探头连接线,以免发生电击或其他安全问题。
第二章:保养规程2.1 常规保养探头的常规保养包括以下方面:•定期清洁:挑选合适的清洁液体和软布,轻轻擦拭探头表面,以清除杂质和污垢。
•定期校准:根据使用频率和需要,定期对探头进行校准,以保证测量的准确性。
•定期检查:定期检查探头是否完好无损,是否存在损坏或老化的情况,如发现问题,及时更换或修理。
2.2 存储保养探头的存储保养包括以下方面:•安全存放:在不使用探头时,应将探头存放在干燥、阴凉、通风的处所,避免阳光暴晒和潮湿环境。
•防护封装:可以使用专用的防护封装将探头包裹起来,以避免受到碰撞或磨损。
•可靠备份:对于长期存储的数据,应定期进行备份,以防止数据丢失或损坏。
雷尼绍检查规

QC20-W无线球杆仪系统硬件软件QC20-W 球杆仪及球杆仪组件QC20-W 球杆仪包括一个雷尼绍自主设计的精密位移传感器(已申请专利)。
它用于测量球杆仪在绕一个固定点旋转时的半径变化。
该数据用于根据 ISO 230-4、ASME B5.54/57和GB17421.4等国际标准计算定位精度的总体测量值(圆度、圆度偏差)。
在采用雷尼绍独特的诊断报告格式分析该数据时,还可提供单个误差源的详细诊断。
数据以图形和数字的格式显示,用以帮助故障诊断。
信号处理在球杆仪内部进行,数据传输使用Bluetooth ®(蓝牙)二类模块输送至匹配的个人计算机中。
传感器壳体上有一个LED 状态指示灯,对通讯、电池和故障状态进行指示。
每套系统随机配备一只标准(非充电型)CR2锂电池,不过系统的电子装置和组件也允许使用可充电CR2电池。
Zerodur ®校准规每套QC20-W 组件 (A-8014-1510) 均随附一个Zerodur ®校准规,用于校准球杆仪的长度。
它是由零温度膨胀系数的材料制成的。
当与Zerodur ®校准规配合使用时,QC20-W 球杆仪可以计算绝对(而不是相对)误差,来决定各轴比例匹配关系和径向偏差值,满足ISO 230-4和ASME B5.54/57分析所需。
此外,此软件还会自动计算待测机器的位置公差。
(位置公差值是在球杆仪测试区域、在无负载条件下对机器在某一平面内双向定位精度好坏的一个估计) Zerodur ®校准规可以校准100 mm 、150 mm 及300 mm 的长度。
小圆组件包含一个50 mm Zerodur ®校准规。
QC20-W 球杆仪组件组件包括• QC20-W 无线球杆仪(和一只CR2电池)• 中心座• 工具杯• 50、150和300 mm 加长杆• Zerodur ®校准规• 系统软件(含手册)• 中心设定球• 机器验证卡• 校准证书• 系统便携箱(便携箱组件包括用于存放小圆组件和VTL 适配器的带槽口的海绵块)Zerodur ®为Schott Glass T echnologies Inc.公司的商标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QC20-W无线球杆仪系统硬件软件QC20-W 球杆仪及球杆仪组件QC20-W 球杆仪包括一个雷尼绍自主设计的精密位移传感器(已申请专利)。
它用于测量球杆仪在绕一个固定点旋转时的半径变化。
该数据用于根据 ISO 230-4、ASME B5.54/57和GB17421.4等国际标准计算定位精度的总体测量值(圆度、圆度偏差)。
在采用雷尼绍独特的诊断报告格式分析该数据时,还可提供单个误差源的详细诊断。
数据以图形和数字的格式显示,用以帮助故障诊断。
信号处理在球杆仪内部进行,数据传输使用Bluetooth ®(蓝牙)二类模块输送至匹配的个人计算机中。
传感器壳体上有一个LED 状态指示灯,对通讯、电池和故障状态进行指示。
每套系统随机配备一只标准(非充电型)CR2锂电池,不过系统的电子装置和组件也允许使用可充电CR2电池。
Zerodur ®校准规每套QC20-W 组件 (A-8014-1510) 均随附一个Zerodur ®校准规,用于校准球杆仪的长度。
它是由零温度膨胀系数的材料制成的。
当与Zerodur ®校准规配合使用时,QC20-W 球杆仪可以计算绝对(而不是相对)误差,来决定各轴比例匹配关系和径向偏差值,满足ISO 230-4和ASME B5.54/57分析所需。
此外,此软件还会自动计算待测机器的位置公差。
(位置公差值是在球杆仪测试区域、在无负载条件下对机器在某一平面内双向定位精度好坏的一个估计) Zerodur ®校准规可以校准100 mm 、150 mm 及300 mm 的长度。
小圆组件包含一个50 mm Zerodur ®校准规。
QC20-W 球杆仪组件组件包括• QC20-W 无线球杆仪(和一只CR2电池)• 中心座• 工具杯• 50、150和300 mm 加长杆• Zerodur ®校准规• 系统软件(含手册)• 中心设定球• 机器验证卡• 校准证书• 系统便携箱(便携箱组件包括用于存放小圆组件和VTL 适配器的带槽口的海绵块)Zerodur ®为Schott Glass T echnologies Inc.公司的商标。
2QC20-W球杆仪Bluetooth 文字商标和标识归Bluetooth SIG, Inc.所有,Renishaw plc 使用的所有此类商标均已获得授权。
其他商标和商品名为各自所有者拥有。
220°3测试能力QC20-W 球杆仪标准组件包括一个100 mm 长的球杆仪和50、150和300 mm 长的加长杆。
球杆仪与不同尺寸的加长杆组合使用,可以进行100、150、250、 300、400、450、550或600 mm 半径的测试。
采用额外的加长杆,可执行半径长达1350 mm 的测试。
可选的小圆组件可进行50 mm 半径的测试,测试也可使用可选附件在两轴机器和车床上进行(第6页)。
部分圆弧测试全新设计的球座(包括新的中心座和工具杯加长杆)使Q C 20-W 可以在通过中心座轴线的平面上执行220°圆弧测试。
这说明可以在三个正交平面上执行球杆仪测试而无需重新调整中心座位置,从而加快了测试速度。
测试结果还可在新的“空间分析”报告功能中使用(参阅软件章节),保证所有数据均围绕同一个参考点进行采集。
部分圆弧测试还意味着Z 轴测试更简单(无需用户定制卡具)并降低了对轴行程范围的要求,例如在150 mm 半径测试中对Z 轴行程的要求就缩短了100 mm 。
证书和重新校准所有QC20-W 球杆仪均随配详细的校准证书;这是精度的保证。
证书还包括符合ISO 17025要求的详尽溯源性记录。
加工车间的环境可能很恶劣,也可能发生一些影响球杆仪性能的事故。
因此,建议定期进行重新校准,使您确信球杆仪的测量符合指标要求。
在典型使用情况下,我们建议每年重新校准一次(详情请参阅网站)。
雷尼绍的QC20-W 校准服务包括检查和测试球杆仪更换工具杯和球、与激光参考标准进行对比、计算新的刻度因子、颁发精度和溯源性记录证书。
系统指标可以用随附的中心座执行100 mm 和150 mm 半径的部分圆弧测试。
* Ballbar 20允许产生多语言版本的报告以及选择一种软件操作语言。
有英语、德语、法语、意大利语、西班牙语、汉语、日语、捷克语、韩语、俄语和波兰语版本可供选择。
测量和诊断软件4集成在测试软件中的在线手册多语言支持*Ballbar 20软件与QC20-W球杆仪一样,Ballbar 20软件功能强大,使用方便。
直观的界面和循序渐进的操作说明意味着您在几分钟之内就可以使用系统。
重要特性:•易于使用的接口(与Windows XP、WindowsVista®、Windows 7兼容)•实时数据采集•按照所有主要标准分析并显示测试数据•位置公差值计算•全面的集成在测试软件中的在线帮助手册•多语言支持*•功能强大的文件和模板管理工具分析报告可以按照最新的ISO 230-4、JIS B 6190-4、B5.57、B5.54和GB17421.4标准分析并显示数据。
这些报告针对每一种机器指标总体精度给出测量值,例如圆度偏差。
采用独特的数学算法,雷尼绍分析报告可以给出多达19个影响机器精度的误差值。
它还能根据这些误差对总体定位误差影响的重要程度排序。
简言之,这是一个真正的“专家”系统,通过单个测试即可深入诊断机器误差。
雷尼绍分析还可以与“部分圆弧”测试配合使用。
软件还可让您:• 为每项机器特性分别设定报警和故障性能公差带• 在球杆仪测试过程中,如果机器性能超出这些公差, 您将获得实时通知甚至还提供组合的历史记录图,显示所有各种误差参数单独形成的圆度值随时间的变化。
这是非常有用的“首要故障排除”工具,可检查机器性能历史记录和所呈现误差的相对重要性。
机器历史记录可让您:• 预先制定维护计划以减少意外停机• 比较机器碰撞前后的性能,以便查明故障原因,制定预防性维护计划• 检查所做的维护和维修调整的效果• 评估机器历史记录,识别重复出现的问题和先前所做纠正的效果空间分析这是一个新报告选项,可以让用户选择三个测试文件,然后显示“球度”数值结果和最大和最小总体圆度值。
三个平面中每个平面的图形结果及其各自的圆度结果一起提供。
本分析选项还分别显示各个测试圆度结果。
空间分析仅在“雷尼绍分析”中检查结果时可用,在ISO 、ASME 和其他标准的分析中没有该项功能。
为确保分析的有效性,该软件对数据文件执行检查,例如一致的机器名称、进给率、半径以及测试平面为正交,而且只有在符合这些条件时才会显示分析。
空间精度诊断只适用于由BB20软件所采集的数据来做分析, 可配合QC10(做三个360°测试)或QC20-W (一个360°加两个220°测试)。
零件程序生成器此功能可以为特定的球杆仪测试自动生成零件程序。
要创建零件程序,用户只需设定球杆测试或选择现有的测试模块并选择预定义的数控系统模块,然后点击“生成”按钮即可。
生成的零件程序可以先在屏幕上检查,然后打印或将其输出至移动存储设备。
5小圆组件小圆组件与QC20-W球杆仪配合使用,用于50 mm 半径的测试。
它在被测机器的轴行程较短、或重点测试机器伺服效果和动态误差时非常有用(小圆组件要求较高的机器加速度和减速度)。
该选购组件包括一个50 mm微晶玻璃校准规(和校准证书)和小圆组件适配器,适配器还另外随配一个已安装的中心球。
适配器是一个简单的螺纹配件,可安装在球杆仪主体上。
建议该组件不要与车床附件一起使用。
适配器是单独为已拥有小圆组件且希望由QC10升级至QC20-W的客户提供的。
VTL(立式车床)适配器VTL适配器可用于2轴数控应用(它取代了标准设定中的“工具杯”并将中心球碗的运动限制在单个轴。
)这样,典型的二轴机器,例如立式车床和激光切割机等也可以使用QC20-W球杆仪进行分析。
在设定了零点位置坐标之后,VTL附件使得磁力碗座可以退出(使其可以利用自由轴的运动被推至测试起始位置),然后被向前推(至第三轴零点位置),不会给其他两个轴引进任何偏心误差。
以下示意图显示了在VTL上的典型应用,其中刀具头始终在旋转轴的中心线上沿着X轴移动。
6系统附件VTL适配器将磁力碗座的运动限制在轴上一个方向运动,移动范围为5 mm。
典型的两轴立式车床,显示的是刀架上的VTL适配器。
QC20-W小圆组件内容车床组件车床组件使您可以在车床上进行360°的100 mm半径的球杆仪测试。
组件包括一个用于连接车床刀架的刀臂组件和一个用于连接车床主轴的主轴杆。
刀臂和主轴杆都包括固定球杆仪的磁力碗座;刀臂中的磁力碗座相当于普通组件设定中的工具杯,而主轴杆中的磁力碗座相当于支座组件/中心球碗。
请注意:要使用本配件,车床必须具有以下能力:轴间隙X轴:与中心线距离220 mmZ轴:距卡盘330 mm主轴直径Ø25 mm(其他机器则需要额外的磁力碗座)刀架可以安装20 mm或25 mm刀柄在轴行程有限的车床上可使用小圆组件来进行50 mm半径测试。
但不推荐这种设定方案,因为该测试所检测的区域远离一般切削区域,同时,在测试过程中球杆仪可能偏离磁力碗座。
车床适配器组件7中国印制 2012.02 L-8014-1613-03©2012 Renishaw plc 版权所有我们尽力确保样本中提供的规格准确。
Renishaw 不断对其产品进行改进和完善,并保留对产品外观或规格进行更改的权利, 恕不另行通知。
RENISHAW 标识中使用的RENISHAW ®和测头图案为Renishaw plc 在英国及其他国家或地区的注册商标。
apply innovation 为Renishaw plc 的商标。
Windows ®和Vista ®为Microsoft Corporation在美国及其他国家或地区的注册商标。
雷尼绍不断创新, 为您的问题提供有效解决方案 雷尼绍公司是计量领域享有盛誉的领先者,提供高性能并具有卓越性价比的测量解决方案,旨在提高生产率。
遍布世界各地的子公司及经销商为用户提供优质服务及技术支持。
雷尼绍产品的设计、开发及制造均符合ISO9001标准。
雷尼绍公司用下列产品和技术提供创新的解决方案:• 坐标测量机用测头系统• 机床用工件找正、对刀及工件在机检测系统• 扫描及数字化系统• 机器性能测量和校准用激光干涉仪和球杆仪系统• 用于高精度位置反馈的光栅系统• 实验室及过程控制中用于材料无损检测的激光拉曼光谱仪• 各种工件检测和对刀仪专用测针• 针对用户要求定制的个性化应用方案香港 T +852 2753 0638 F +852 2756 8786E hongkong@ 印度 T +91 80 6623 6000F +91 80 6623 6060 E india@印度尼西亚 T +62 21 2550 2467 F +62 21 2550 2555E indonesia@ 日本 T +81 3 5366 5324F +81 3 3358 6437 E japan@马来西亚 T +60 3 5631 4420 F +60 3 5631 5407E malaysia@ 新加坡 T +65 6897 5466F +65 6897 5467E singapore@ 韩国 T +82 2 2108 2830F +82 2 2108 2835E southkorea@ 台中 T +886 4 2473 3177F +886 4 2473 3133 E taiwan@ 泰国 T +66 2 746 9811 F +66 2 746 9816E thailand@雷尼绍(上海)贸易有限公司中国上海市闸北区万荣二路1号200436T +86 21 6180 6416 F +86 21 6180 6418E shanghai@ 英国总部联系方式T +44 1453 524524 F +44 1453 524901 E uk@北京 T +86 10 5108 8282 F +86 10 8448 1528 E beijing@ 广州 T +86 20 8550 9485 F +86 20 8550 9458E guangzhou@ 成都 T +86 28 8652 8671F +86 28 8652 8730 E chengdu@ 沈阳 T +86 24 2334 1900 F +86 24 2334 1500E shenyang@ 青岛 T +86 532 8909 0811F +86 532 8909 0810 E qingdao@ 西安 T +86 29 8833 7292 F +86 29 8833 7249 E xian@苏州T +86 512 8686 5539 F +86 512 8686 5569 E suzhou@ 深圳 T +86 755 3369 2648 F +86 755 3369 2649E shenzhen@客服热线 400 690 8466雷尼绍亚洲区联系方式。