简单增量调制
增量调制实验
四、实验方案:
这里介绍两个方案。方案一是分立元件及中 小规模集成电路组成的简单增量调制实验方案; 方案二是集成数字压控扩增量调制实验方案。两 个方案放在一个机箱内,如图2所示。
八、实验报告及要求:
(1).各项测试内容的数据准确,波形逼真,时间关系无误。 (2).用每项实验内容中测试的数据及波形来说明简单增量调 制系统的实际过程及其主要特性。 (3).实验中测出的各项指标应与理论值比较,并分析误差的 主要原因。 (4).简单增量调制系统存在什么主要问题,应如何改进。 (5).简单增量调制的编码器在输入信号为零时,输出的“0”、 “1”交替码是如何产生的?
DC 20 lg Amax / Amin
4. 简单增量调制实验系统最大量化信噪 比的测量:
S0 / Nq 0.04 fs3 / fk2 fm
其中,fm是接收端低通滤波器的截止频率。
实验使用仪器及连接图
三、实验系统组成
简单增量调制实验系统的组成如图1所示,图 中,积分器和脉冲产生器组成本地译码器,它的作 用是根据P0(t),形成预测信号m0(t),
斜率K(积分台阶σ及抽间隔Δt,K=σ/Δt),并在时间上对应
画出系统各点波形; 2. 改变系统输入正弦信号的幅度与系统抽样频率的数
值,分别测量系统处于起始编码、编码状态及临界过载状 态下的系统输入信号幅度,同时分别画出系统各观察点在 输入信号一周期内所对应的波形;
3. 简单增量调制实验系统编码动态范围测量:
增量系统
增量调制系统知识要点:简单增量调制编码原理简单增量调制译码原理简单增量调制框图过载性动态范围增量调制的抗噪声性能总和增量调制数字音节压扩自适应增量调制数字音节压扩调制脉冲增量调制增量调制简称,它是继PCM之后出现的又一种模拟信号数字化方法。
最早是由法国工程师De Loraine于1946年提出来的,其目的在于简化模拟信号的数字化方法。
在以后的三十多年间有了很大发展,特别是在军事和工业部门的专用通信网和卫星通信中得到广泛应用,不仅如此,近年来在高速超大规模集成电路中已被用作A/D转换器。
增量调制获得广泛应用的原因主要有以下几点:(1)在比特率较低时,增量调制的量化信噪比高于PCM的量化信噪比;(2)增量调制的抗误码性能好。
能工作于误码率为~的信道中,而PCM要求误比特率通常为~;(3)增量调制的编译码器比PCM简单。
增量调制最主要的特点就是它所产生的二进制代码表示模拟信号前后两个抽样值的差别(增加、还是减少)而不是代表抽样值本身的大小,因此把它称为增量调制。
在增量调制系统的发端调制后的二进制代码1和0只表示信号这一个抽样时刻相对于前一个抽样时刻是增加(用1码)还是减少(用0码)。
收端译码器每收到一个1码,译码器的输出相对于前一个时刻的值上升一个量化阶,而收到一个0码,译码器的输出相对于前一个时刻的值下降一个量化阶。
下面将较为详细地讨论增量调制原理和性能,并介绍几种改进型增量调制方式。
一、简单增量调制我们知道,一位二进制码只能代表两种状态,当然就不可能表示模拟信号的抽样值。
可是,用一位码却可以表示相邻抽样值的相对大小,而相邻抽样值的相对变化将能同样反映模拟信号的变化规律。
因此,采用一位二进制码去描述模拟信号是完全可能的。
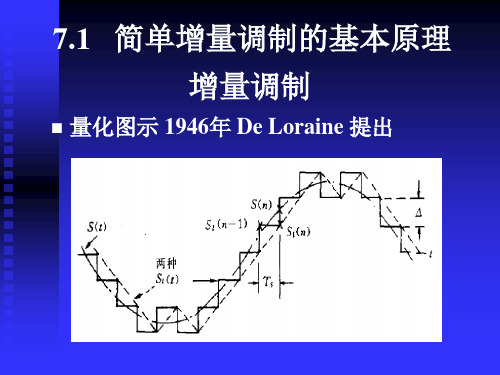
1.编码的基本思想假设一个模拟信号x(t) (为作图方便起见,令x(t) ≥ 0),可以用一时间间隔为,幅度差为的阶梯波形去逼近它,如图6-16所示。
只要足够小,即抽样频率足够高,且足够小,则可以相当近似于x(t)。
增量调制
假设脉冲发生器输出幅度为 E,且RC Ts , 则有
E 2Ef1 Ts RC fs
则
2 2 3 4 E f 2 2 H f f q 3 1 H 3 fs 3 2 2 3 4 E fH 2 q (近似条件f1 f H ) 3 3 fs
dB
30 log 10 f s 20 log 10 f 10 log 10 f B 14
7.2 数字压扩增量调制
7.3 增量总和调制
(1)增量总和调制原理 增量总和调制的基本思想是对输入的模拟信号先 进行一次积分处理,改变信号的变化性质,降低信 号高频分量的幅度(从而使信号更适合于增量调 制),然后再进行简单增量调制。其过程就像先对 信号求和(积分),后进行增量调制一样,所以称 为增量总和调制。
过载问题
分析正弦波: s(t ) A cos t
A max f s Ts
最大斜率 A, 则临界过载时,有
不过载情况下,M的量化噪声为
1 2 e p(e)de e de 2 3
2 q 2
2
假设量化噪声在(0,fs)的范围内均匀分布,接收 端带宽为fB,低通滤波器后的量化噪声为
f (t )dt Po (t )dt [ f (t ) Po (t )]dt
这样可以节省一个积分器,从而简化了系统结构。
T(t)
f (t) + Po (t) fo (t)
∑
-
积分 器
F (t)
抽样 判决
…
低通 滤波器
增 量 总 和 调 制 器 (编 码 器 )
增量 总和解 调器
2)选△
K f s Ts
数字通信第四章
第4章
增量调制
4.1简单增量调制(ΔM或DM) 4.2改进型增量调制系统
4.3 PCM和△M系统性能比较
4.4自适应差分脉冲编码调制ADPCM
第4章 增量调制
增量调制ΔM是不同于PCM的另一种模拟信号数字化的方
法,其基本思想是利用相邻样值信号幅度的相关性,以相邻 样值信号幅度的差值变化来描述模拟信号的变化规律,即将 前一样值点与当前样值点之间的幅值之差编码来传递信息。 因这种差值又称为增量,所以这种利用差值编码进行通信的 方式称为“增量调制(Delta Modulation)”,采用这种编码 方式的主要目的是可以简化语音编码的方法,缩短二进制码
第4章 增量调制
脉冲时钟 输入 信号 + - 本地 译码器 脉冲幅度 调制器 平滑 电路 脉冲幅度 调制器 输出 信号
∑
判决器
译码
滤波
平滑 电路
数字 检测器
数字 检测器
图4-6 数字检测音节压扩自适应增量调制系统原理框图
第4章 增量调制
从图4-6中可以看出,在发送端数字检测音节压扩增量调制
是在简单ΔM的基础上加上数字检测、平滑电路和脉冲幅度调 制器三部分组成,这三部分共同起着音节压缩作用。其工作原 理如下。 当数字检测器检测到一定长度的连“1”或连“0”码时,便
动而造成的失真。而后者是由于当输入信号的斜率较大,调制
器跟踪不上输入信号的变化而产生的。因为在ΔM系统中每个抽 样间隔内只允许有一个量化电平的变化,所以当输入信号的斜 率比抽样周期决定的固定斜率(Δ/Ts)大时,量化阶的大小便 跟不上输入信号的变化,因此产生斜率过载噪声,如图4-3所示。 总之,ΔM系统的最大优点是结构简单,只编一位码,因此, 在发端与收端之间不需要码字同步。由于ΔM系统对差值只用两 个电平,量化太粗糙,其性能不如PCM系统。
通信原理第4章增量调制
第4章
增量调制
改进ΔM动态范围的方法
采用自适应方法使量阶Δ的大小随输入信号的 统计特性变化而跟踪变化
量阶能随信号瞬时压扩,则称为瞬时压扩ΔM,记 作ADM。 若量阶Δ随音节时间间隔(5一20ms)中信号平均斜 率变化,则称为连续可变斜率增量调制,记作 CVSD(Continuous Variable Slope Delta Modulation ) 音节压扩的自适应增量调制,简称数字压扩增量调 制。
第4章
增量调制
自适应增量调制(Adaptive Delta Modulation)
(1)基本概念:
由前述的基本增量调制, 得信号幅度的动态范围为 [ Amin , Amax ] : Amin = 小信号
s
2
sf s ~ Amax = k
大信号
动态范围为D0 = Amax / Amin , D0 越大, 效果越好.如果能通过 某种方法增大D0 , 则增大信噪比. 增大D0的方法是, 对于大信号增加s , 对于小信号减小s , 即 为s可变的自适应增量调制( ADM )
t
= s fs
第4章
增量调制
例题4―1
已知一个话音信号的最高频率分量 fH=3.4kHz,幅度为A=1V。若抽样频率 fs=32kHz,求增量调制台阶σ=?
第4章
增量调制
例题4―1 解
求话音信号的最大斜率。 若信号为单频正弦型信号f(t)=Asinωt,则其 斜率就是它的导数, df (t ) k (t ) = = A cos t
s 称为量阶 s
f (t ) : 阶梯波(蓝色)
f 0 (t ) : 积分器 输出(绿色) f (t ) : 输入 信号(红色)
现代通信原理7第七章 增量调制
又设脉冲发生器输出幅度+/-E,且RC>>TS 积分网络时常数大大大于采样周期),TS时间内 的充电量只有最大值E的TS /RC。
TS 2Ef1 E RC fs
41
所以
4 E f 2 ( f1 f H ) 2 3 3 fs
2 2 2 q 3 H
通过参数选取使f1<<FH,有
fH
fL
1 df 2 f
2 E Pb 1 1 ( ) 2 2 2 f s R C fL fH
52
由于fH>>fL
2E P 1 b (f) ( ) 2 2 2 f s R C fL
2 t
2
对于积分器,若时常数RC>>TS,可以近似为 线性增长。接收一个正脉冲(编码“1”),将增加 一个量化间隔的电平。
14
以下是M的编码波形示意
实线正弦信号为输入的消息信号。 虚线折线部分是预测值(积分器输出),实线 阶梯波是另一种积分器输出形式。
15
M调制的波形图
16
在信号变化比较缓慢的区域内,编码后得 到的序列会是“1”和“0”交替变化的,这种现 象称为颗粒噪声。
17
M斜率过载问题:
当输入信号的斜率比采样周期决定的固有斜率
3 s 3 H
3 s 3 H
证明了式(7-8),增量总和调制的量化信噪比 与输入信号的频率无关。
45
7.4 信道误码对增量调制的影响
本章开头曾经谈到增量调制比PCM编码 调制有较高的抗误码特性。 以下来推导,增量调制接收系统如图
在分析误码影响时,常把接收到的信号分解 成无误码信号序列和误码信号序列之和,见下图。
实验四Δm及CVSD编译码实验

实验四Δm及CVSD编译码实验实验四Δm及CVSD编译码实验⼀、实验⽬的1、掌握简单增量调制的⼯作原理。
2、理解量化噪声及过载量化噪声的定义,掌握其测试⽅法。
3、了解简单增量调制与CVSD⼯作原理不同之处及性能上的差别。
⼆、实验器材1、主控&信号源模块、21号、3号模块各⼀块2、双踪⽰波器⼀台3、连接线若⼲三、实验原理1、Δm编译码(1)实验原理框图信号源music/A-outCLK抗混叠滤波器LPFLPF-IN LPF-OUTΔm 编码编码输⼊门限判决时钟Δm译码时钟译码输⼊译码输出3# 信源编译码模块⽐较量化延时极性变换量阶编码输出延时本地译码⾳频输⼊图⼀Δm编译码框图(2)实验框图说明编码输⼊信号与本地译码的信号相⽐较,如果⼤于本地译码信号则输出正的量阶信号,如果⼩于本地译码则输出负的量阶。
然后,量阶会对本地译码的信号进⾏调整,也就是编码部分“+”运算。
编码输出是将正量阶变为1,负量阶变为0。
Δm译码的过程实际上就是编码的本地译码的过程。
2、CVSD编译码(1)实验原理框图信号源music/A-outCLK抗混叠滤波器LPFLPF-INLPF-OUTΔm 编码编码输⼊门限判决时钟Δm 译码时钟译码输⼊译码输出⽐较延时极性变换量阶调整编码输出延时本地译码量阶调整⼀致脉冲量阶3# 信源编译码模块⾳频输⼊图⼆ CVSD 编译码框图(2)实验框图说明与Δm 相⽐,CVSD 多了量阶调整的过程。
⽽量阶是根据⼀致脉冲进⾏调整的。
⼀致性脉冲是指⽐较结果连续三个相同就会给出⼀个脉冲信号,这个脉冲信号就是⼀致脉冲。
其他的编译码过程均与Δm ⼀样。
四、实验步骤项⽬⼀:△M 编码规则实验项⽬⼆:量化噪声观测项⽬三:不同量阶△M 编译码的性能项⽬四:△M 编译码语⾳传输系统项⽬五:CVSD 量阶观测项⽬六:CVSD ⼀致脉冲观测项⽬七;CVSD 量化噪声观测项⽬⼋:CVSD 码语⾳传输系统五、实验记录TP4(信源延时)和TH14(编码输出) TP4(信源延时)和TP3(本地译码)项⽬⼆CH1信源延时,CH2 本地译码项⽬三量阶3000,Vpp=3V项⽬三量阶6000,Vpp=3V 项⽬三量阶3000,Vpp=1V项⽬五量阶6000,Vpp=1V 项⽬五 Vout=1V项⽬五 Vout=2V 项⽬五 Vout=4V项⽬七 Vpp=1V 项⽬七 Vpp=3VCVSD量化噪声观测(2KHz)Vpp=3V的噪声CVSD量化噪声观测(2KHz)Vpp=1V的噪声六、思考题回答1.增量调制的速率可以是32kbps、16kbps相⽐PCM 64kbps产⽣的原因怎样?(请查找资料)今天VoIP采⽤什么样的信源编码?视频的MPEG2编码⼜是什么?答:PCM的速率是增量调制的整数倍,利⽤此特点,可进⾏信道的复⽤,扩⼤信息量的传输。
第七章 增量调制汇总
7.1 简单ΔM调制
Sl t S t et es t
即
ds(t) dt
max
Ts
fs
若Sl t S t et es t,其最大斜率为 A ,即
ds(t) A dt max
所以不产生斜率过载条件为:A fs 临界过载时,有 Amax fs
7.1 简单ΔM调制
5. 增量调制接收端工作过程:
收端译码输出 s '(t) 即 sl (t) 那样的信号,收端译码可由积分器 完成,它将 sM (t) 恢复成 sl (t) 波形(与 s(t) 近似),再经带宽 为 m 的LPF平滑,输出即为原始信号 s(t) 及量化误差 q (t) , 在输出端形成了噪声---量化噪声。
7.1 简单ΔM调制
4. 增量调制原理波形图:
从t=0开始的几个脉冲周期,因为 s(t) sl (t), 所以输出全为正脉冲(见图b),经积分后 sl (t) 以Δ上升,逐渐接近 s(t) ,直到 s(t) sl (t) , 此后, sl (t) 随 s(t) 按如上规律变化,产生 正负输出脉冲序列。由图a可知: sl (t)与 s(t) 的误差 e(t)除t=0开始的一段时间内,误差 不超过 V。
7.1 简单ΔM调制
7.1.1 增量调制原理
1. 增量调制原理框图:
7.1 简单ΔM调制
2. 发送ΔM码二进制序列的形成:
误差信号 e(t) s(t) sl (t),e(t) 送入定时判决器,当脉宽为 ,
周期为 Ts 2 / s 的钟脉冲到来时刻,若 e(t) 0 ,判决器输出 一正脉冲;若 e(t) 0 ,判决器输出一负脉冲,即二进制码 序列,称为ΔM码( sM (t) 信号)。
增量调制
(3) 本地译码器。 它由码型变换和反相放大、 积分器和射 极跟随器等3部分组成。由于p(t)是单极性的,因此加到积分器 前一定要变为双极性信号,这就是需要码型变换的原因。 反向放大一方面把双极性信号放大,另一方面使它反相, 这样经积分就得-x0(t)。积分器一般用时间常数较大的RC充放电 电路, 这样可以得到近似锯齿波的斜变电压。积分器后面的射 极器是把积分器和放大器分开,保证积分器输出端有较高的阻 抗。 f点g点的波形也在图7-31中。 g点和b点波形是一样的。 积分器的时间常数RC选得越大,充电放电的直线线性越好, 但RC太大时,在Ts时间内上升(或下降)的量阶σ越小,一般选择 在(15~30)Ts比较合适。
图7-31简单增量调制各点波形
(2) 定时判决电路。它由D触发器和定时取样脉冲完成判决 任务。定时取样脉冲是间隔为Ts的窄脉冲,在定时脉冲作用时 刻,d点电压为正,触发器呈高电位,相当于1码,反之d点为 负, 触发器呈低电位,相当于0码。e点波形(即p(t))如图7-31(f) 所示它是单极性的。1码的高电位一般约为几伏; 0码时是低 电位,一般为零点几伏。p(t)作为∆M信号可直接送到线路上传 输,或者经过极性变换电路变为双极性码后再传输,此外,p(t) 送到本地译码器产生-x0(t)。
图7-30简单ΔM系统原理方框图 (a)发送端组成;(b)实际组成原理框图
(1) 放大和限幅电路。相减器在这里用多级放大和限幅 电路代替, 放大器输入端加上x(t)和-x0(t),起到相减的作用, 经过放大e(t)=k[x(t)-x0(t)];为了判决器更好工作,e(t) 经 放大限幅变成正负极性电压,只要x(t)-x0(t)>0,d点为一较 大的近似固定的正电平,反之x(t)-x0(t)<0,d点为一较大的 近似固定的负电压。图7-41中画出了a、b、c、d各点的波形。
实验五 增量调制原理
电子科技大学通信学院《增量调制原理实验指导书》增量调制原理实验班级7班学生李孟阳学号2012079070020教师增量调制原理实验指导书增量调制原理实验一、实验目的1、了解增量调制系统的组成及原理。
2、研究系统性能指标及各部分波形。
3、研究各部分参数对系统性能的影响。
4、研究理论与工程模型之间的关系。
二、实验原理简单增量调制、解调系统是继PCM之后的又一种模拟信号的数字化方法。
其目的在于简化模拟信号的数字化方法。
最大特点是实现容易,近年来在高速大规模集成电路中用作A/D转换器。
获得应用的主要原因是:1)在低比特率时信噪比高于PCM。
2)增量调制的抗误码性能好,能工作于误码比特率为10-2~10-3的信道而PCM则要求误码率为10-4~10-6。
3)增量调制编译码器比PCM简单。
实验系统主要由以下部分组成。
1、模拟信源可产生系统正弦波,方波,锯齿波等典型模拟信号波形。
2、二值量化器对模拟信号抽样后进行二值量化并作为双极性NRZ码输出。
3、脉冲发生器由于双极性二元量化量是一种±幅值输出的标准脉冲发生器,因此只须加一放大器,就可以构成增量脉冲发生器。
4、积分器本系统采用理想积分器,实际工程应用中用有源积分,或无源RC或LC积分器,均可在本系统的应用环境中很好的近似理想积分。
5、输出滤波器本系统提供参数可调滤波器,其类型,阶数及上下截止频率,均由实验人员自行设定。
本实验系统设定两种系统实验,简单增量调制及积分总和增量调制。
三、实验步骤1、开机进入Windows桌面。
2、双击桌面上的MATLAB快捷图标,进入命令窗。
3、键入:C102,进入仿真实验界面。
4、选择Increment Modulation实验类型,这时在具体实验项目栏中列出该实验所包含的具体各项实验。
5、选择Increment Modulation实验,再按下RUN一按钮,即进入该实验框图界面。
6、设置标准信号参数信号发生器波形:锯齿波、幅度1V、频率1HZ;抽样量化器:抽样率0.001秒:脉冲发生器:幅值10滤波器:类型LPF,截止频率5*2*PI,3阶。
(完整)简单增量调制
湖南工程学院课程设计课程名称通信原理课题名称简单△M增量调制专业电子信息工程班级电信1102班学号 201101030234 姓名易元圆指导教师熊卓烈2013年12月23日目录第一章总体设计思路 (1)1.1 设计要求 (1)1。
2 增量调制基本原理 (2)1.3 增量调制的设计原理和框图 (3)第二章单元电路设计 (4)2。
1 减法电路 (4)2。
2 误差放大电路................... 错误!未定义书签。
2。
3 限幅电路 (6)2.4 判决电路 (7)2。
5 单/双变换电路 (8)2。
6 积分电路 (7)2.7 射极放大电路 (8)第三章Systemview仿真与调试 (9)3。
1 Systemview简介 (9)3.1 仿真步骤 (9)3。
2 仿真结果 (10)第四章总电路图 (12)4.1总电路图 (12)第五章总结与体会 (13)参考文献 (14)第一章总体设计思路1.1 设计要求1.思路清晰,牢牢掌握增量调制原理,给出整体设计框图,画出整机原理图;2。
了解语音信号的△M编码过程,给出具体设计思路,画出单元电路,并进行电路原理的分析;3。
采用System View仿真软件对系统进行仿真,并调试出正确的仿真结果;1.2 增量调制基本原理增量调制(DM)可以看成是一种最简单的DPCM。
当DPCM系统中量化器的量化电平数取为2时,且预测器仍简单地是一个延迟时间为抽样时间间隔T的延迟线时,此DPCM系统就成为增量调制系统。
其原理方框图如图1-1所示:(a)编码器(b)译码器图1-1 增量调制原理框图增量调制或称增量编码,是将连续变化的模拟信号变成二进制数码的一种调制方法,它是用一位二进制数码来表示信号在此时刻的值相对于前一个取样时刻的值是增大还是减小.增大发“1”码,减小发“0”码。
在增量调制中,数码“1"和“0”只表示信号相对于前一时刻是增大还是减小,不代表信号的绝对值。
第07章增量调制
由图可得:误码信号 的功率谱密度与单个 矩形波的频谱函数的 平方成正比。 则误码信号的功率谱密度可近似为: t2 8E 2 Pb t21 ( f )
f 2 fs
7.4
信道误码对增量调制的影响
误码信号的输出功率谱密度:
2 E 2 Pb fs 2 2 2 t2 ( f ) I ( f ) t2 ( f ) (0 f ) 2 2 2 2 fs f R C 2 其中:I(f)表示积分器的传递函数。 语音信号(fl,fH)通过滤波器后,输出总误码信号 功率为:
f (t )dt Po (t )dt [ f (t ) Po (t )]dt
这样可以节省一个积分器,从而简化了系统结构。
T(t)
f (t) + Po (t) fo (t)
∑
-
积分器
F (t)
抽样 判决
…
低通滤波器
增量总和调制器(编码器)
增量总和解调器
7.4
信道误码对增量调制的影响
(1)接收端的输出信号: 由增量调制的原理可得其输出信号为:
ˆ ˆ ˆ S `( n) S `( n 1) e`( n)
其中,
ˆ e`( n) b(n)
则
ˆ S `( n) b(k ) S `(0)
k 1
n
公式表明:△M接收端信号可以看成是所有时刻前的 接收信号的累加和。
2 E 2 Pb f H df 2 E 2 Pb 1 1 t2 t22 ( f )df 2 2 2 2 2 2 2 fL fs R C fL f fs R C f L f H 2 E 2 Pb 2 2 2 ( f H f L ) fs R C fL
增 量 调 制

模拟信号数字化
1.2 简单增量调制
数字与数据通信技术
模拟信号数字化
增量调制
1.1 增量调制的基本概念
增量调制简称ΔM(或DM),最早由法国工程师De Loraine于1946 年提出来的,是不同于PCM的另一种模拟信号数字化的方法。ΔM的基本 思想是利用相邻样值信号幅度的相关性,以相邻样值的相对大小变化来 反映模拟信号的变化规律,就是将前一样值点与当前样值点的幅值之差 (即增量)进行编码,这种利用差值编码进行的通信称为 “增量调制 (Delta Modulation)”。
图3.13 增量调制过程的波形
模拟信号数字化
2.译码的基本思想 与编码相对应,译码也有两种情况,一种是收到“1”码就相对于前一个 时刻的值上升一个量阶Δ,收到“0”码下降一个量阶Δ。这样把二进制代码 经过译码变成了阶梯波,再经过低通滤波器去掉高频量化噪声,从而恢复 原始信号只要抽样频率足够高,量化阶距大小适当,接收端恢复的信号与 原信号非常接近,量化噪声可以很小。
模拟信号数字化
3.简单增量调制系统框图 从简单增量调制解调的基本思想出发,可以组成简单增量调制(ΔM)系 统的简化方框图如图3.14所示。在这里,脉冲调制器实际上是一个由D触发 器组成的定时判决电路,定时脉冲作用时刻,输入电位为正,触发器呈高电 位,相当于1码,反之输入电位为负,触发器呈低电位,相当于0码;积分器 通常采用单纯的RC充放电电路作为译码器(预测器)。低通滤波器的作用是 滤去量化误差的高频成分,从而使译码得到的阶梯波得到平滑,恢复出模拟 信号。
实验三 增量调制原理
增量调制的特点是用一位二进码表示相邻抽样值 的相对大小,而相邻抽样值的相对变化,将能同样反映 模拟信号的变化规律。如图3-1所示。
图3-1增量调制波形示意图
简单增量调制的功能框图如图3-2 所示,
图3-2 增量调制系统结构框图之一
差分
被量化成
即
量化台阶。
是二进制符号,可经信道
传输给远方 解码器。
这个数值通常可以用增大
来达到。
也就是调整解码器的最大跟踪斜率。
有两种量化噪声 1.一般量化噪声,如图3-5(a)所示。 2. 过载量化噪声,如图3-5(b)所示。
图3-5 两种形式的量化噪声
解码器的最大跟踪斜率 设抽样时间间隔为 (抽样频率 则一个台阶的最大斜率K为
),
当信号实际斜率超过这个最大跟踪斜率时,则将 造成过载噪声。为了不发生过载噪声,必须使 的乘积达到一定的数值。
图35两种形式的量化噪声解码器的最大跟踪斜率设抽样时间间隔为抽样频率则一个台阶的最大斜率k为当信号实际斜率超过这个最大跟踪斜率时则将造成过载噪声
实验三 增量调制原理
增量调制简称 或 DM,它是继PCM后出现 的又一种语言信号编码方式。
特点: 1.编解码器设备简单。 2.抗误码性能好。 3.在比特率较低时,有较高的信噪比。
解码器的结构与发端编码器的“延迟单元-相加器”
环路的结构完全相同。
无误码传输时
。
图3-1中的“延迟单元-相加器”环路可用一积分 器
替代,积分器的输入是一个周期为Ts,强度为
根据以上原理,可得增量调制系统的第二种原理 结构图,如图3-3所示
图3-3 增量调制系统结构图之二
解码 解码由一个积分器完成,如图3-4所示。
增量调制实验
⑤. 将COS5020型示波器探头的其中之一接在 “正弦信号输出”端,灵敏度选择开关置于 V/cm档级,调“正弦信号”幅度电位器,使正 弦信号的幅度为零;
⑥. 将COS5020型示波器“显示方式”开关置 于“交替”位,同时观察P0(t)、m0(t)的波形。由 于这时m(t)=0,所以编出的正确码流为“1、0交 替码。如果不是这种码型,则调面板上的“0、1 交替旋钮”,至调出的码流正常为止。
第二步,观察编码状态。继续增大m(t),系 统在dm(t)/dt=K的范围内都能跟踪输入信号m(t), 选择一适当的m(t),记下其幅值,画出这一m(t)在 一周内所对应的P0(t)、m0(t)、m'(t)的波形。第三 步,观察临界过载状态,记下这时的m(t)幅值即 为Amax画出P0(t)、m0(t)、m(t)、m'(t)的波形。
一、实验目的: 加深理解增量调制系统的基本工作原 理及电路组成; 学会对简单增量调制系统工作过程的 检查和测试方法; 熟悉增量调制系统在不同抽样速率下 跟踪输入信号变化率的性能; 准确建立关于一般量化噪声、过载噪 声及最大量化信噪比的概念。
二、实验内容:
1.在系统输入信号幅度为零的情况下,测量系统的跟踪
最佳编码状态示意照片
临界编码状态示意照片
关于dm(t)/dt = K的含意如图2所示:
dm(t) dt
<
K
mO(t)
m(t)
dm(t)
dt = K
m(t) mO(t)
dm(t)
dt > K
m(t) mO(t)
t
t
增量调制

图4―3 增量调制过程示意图
第4章
增量调制
Po(t) 1 0 0 t 2t 3t 4t 5t 6t 7t 8t 9t 10t11t12t13t14t 1 0 1 0 1 1 1 1 1 1 0 0 0 t
′t) f(
(d) 积分器输出信号
0
t
图4―3 增量调制过程示意图
第4章
增量调制
T(t)
f (t ) +
∑
-
积分 器
F (t)
抽样 判决
Po (t)
…
低通 滤波器
fo (t)
增 量 总 和 调 制 器 (编 码 器 )
增量 总和解 调器
图4―6 增量总和调制系统框图
第4章
增量调制
细心的读者会发现,按前面介绍的增量总和调制
原理,应该先对信号积分,然后再进行简单增量调制, 而图中的积分器怎么会放在比较器之后,而且还少了
的模/数转换呢?
第4章
增量调制
我们看一下图4―1。图中在模拟信号f(t)的曲线附近,
有一条阶梯状的变化曲线f′(t),f′(t)与f(t)的形状相似。显然, 只要阶梯“台阶”σ和时间间隔Δt足够小,则f′(t)与f(t)的 相似程度就会提高。对f′(t)进行滤波处理,去掉高频波动, 所得到的曲线将会很好地与原曲线重合,这意味着f′(t)可 以携带 f(t) 的全部信息(这一点很重要)。因此, f′(t) 可 以看成是用一个给定的“台阶” σ 对f(t) 进行抽样与量化 后的曲线。我们把“台阶”的高度 σ 称为增量,用“ 1” 表示正增量,代表向上增加一个 σ ;用“ 0” 表示负增量, 代表向下减少一个σ。
第4章
增量调制
则这种阶梯状曲线就可用一个“0”、“1”数字序
增量调制工作原理
增量调制工作原理增量调制简称ΔM或增量脉码调制方式(DM),它是继PCM后出现的又一种模拟信号数字化的方法。
1946年由法国工程师De Loraine提出,目的在于简化模拟信号的数字化方法。
主要在军事通信和卫星通信中广泛使用,有时也作为高速大规模集成电路中的A/D转换器使用。
它是一种把信号上一采样的样值作为预测值的单纯预测编码方式。
增量调制是预测编码中最简单的一种。
它将信号瞬时值与前一个抽样时刻的量化值之差进行量化,而且只对这个差值的符号进行编码,而不对差值的大小编码。
因此量化只限于正和负两个电平,只用一比特传输一个样值。
如果差值是正的,就发“1”码,若差值为负就发“0”码。
因此数码“1”和“0”只是表示信号相对于前一时刻的增减,不代表信号的绝对值。
同样,在接收端,每收到一个“1”码,译码器的输出相对于前一个时刻的值上升一个量阶。
每收到一个“0”码就下降一个量阶。
当收到连“1”码时,表示信号连续增长,当收到连“0”码时,表示信号连续下降。
译码器的输出再经过低通滤波器滤去高频量化噪声,从而恢复原信号,只要抽样频率足够高,量化阶距大小适当,收端恢复的信号与原信号非常接近,量化噪声可以很小。
增量调制与PCM比较有如下特点:在比特率较低时,增量调制的量化信噪比高于PCM;增量调制抗误码性能好,可用于比特误码率为10-2—10-3的信道,而PCM则要求10-4—10-6;增量调制通常采用单纯的比较器和积分器作编译码器(预测器),结构比PCM简单。
在ΔM中量化过程中存在斜率过载(量化)失真,主要是因为输入信号的斜率较大,调制器跟踪不上而产生的。
因为在ΔM中每个抽样间隔内只容许有一个量化电平的变化,所以当输入信号的斜率比抽样周期决定的固定斜率大时,量化阶的大小便跟不上输入信号的变化,因而产生斜率过载失真(或称为斜率过载噪声)。
ΔM的工作原理图与图9.14基本一致,只不过在调制端使用的量化器只有1比特输出,即Δ输出1或-1两个值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖南工程学院课程设计课程名称通信原理课题名称简单△M增量调制专业电子信息工程班级电信1102班学号 2姓名易元圆指导教师熊卓烈2013年12月23日目录第一章总体设计思路11.1 设计要求11.2 增量调制基本原理21.3 增量调制的设计原理和框图3第二章单元电路设计42.1 减法电路42.2 误差放大电路错误!未定义书签。
2.3 限幅电路52.4 判决电路62.5 单/双变换电路72.6积分电路72.7射极放大电路8第三章Systemview仿真与调试93.1 Systemview简介93.1 仿真步骤93.2 仿真结果10第四章总电路图124.1总电路图12第五章总结与体会13参考文献14第一章总体设计思路1.1 设计要求1.思路清晰,牢牢掌握增量调制原理,给出整体设计框图,画出整机原理图;2.了解语音信号的△M编码过程,给出具体设计思路,画出单元电路,并进行电路原理的分析;3.采用System View仿真软件对系统进行仿真,并调试出正确的仿真结果;1.2增量调制基本原理增量调制(DM)可以看成是一种最简单的DPCM。
当DPCM系统中量化器的量化电平数取为2时,且预测器仍简单地是一个延迟时间为抽样时间间隔T的延迟线时,此DPCM系统就成为增量调制系统。
其原理方框图如图1-1所示:(a)编码器(b)译码器图1-1 增量调制原理框图增量调制或称增量编码,是将连续变化的模拟信号变成二进制数码的一种调制方法,它是用一位二进制数码来表示信号在此时刻的值相对于前一个取样时刻的值是增大还是减小。
增大发“1”码,减小发“0”码。
在增量调制中,数码“1”和“0”只表示信号相对于前一时刻是增大还是减小,不代表信号的绝对值。
接收端译码每收到一个“1”码,译码器的输出相对于前一时刻的值上升一个量阶,每收到一个“0”码,相对于前一时刻的值下降一个量阶。
当收到连“1”码时,表示每隔一个取样时间,连续上升一个量阶,即表示信号的建续增长。
收到连“0”码时,表示每隔一个取样时间,连续下降一个量阶,即表示信号的连续下降。
这就是增量编码和译码的规则。
增量调制目的是简化模拟信号的数字化方法。
其主要特点是:1.在比特率较低的场合,量化信噪比高于PCM;2.抗误码性能好。
能工作在误比特率为102~103的信道中,而PCM则要求信道的误比特率为104~106;3.设备简单、制造容易。
1.3增量调制设计原理和框图增量调制就是一个对模拟信号编码和译码的过程。
在编码器中输入一个模拟信号X(t),它与预测信号Xo(t)相减,得到一个预测误差,预测误差被周期T的抽样冲击序列σ(t)抽样。
若抽样值为负值,则判决输出电压+△V(用“1”代表);若抽样值为正值,则判决输出电压-△V(用“0”代表)。
这样就得到二进制输出数字信号。
如图1-2所示:图1-2 增量调制波形图进行编码之后,进入译码过程。
在解调器中,积分器只要收到一个“1”码元就使其输出升高△V,每收到一个“0”码元就使其输出降低△V,这样就可以恢复出图1-2的阶梯形电压。
这个阶梯形电压通过低通滤波器平滑后,就得到十分接近编码器原输入的模拟信号。
这种方法即用一个简单RC积分电路把二进制码变为平滑的波形,针对图1-2,我们将对其变换调制,如图1-3所示:图1-3 增量调制译码原理图综上所述,我们了解了增量调制的基本原理与工作过程,我们可以设计出增量调制的总原理框图。
在编码器中输入一个模拟信号f (t),它与预测信号f ′(t)相减,用减法电路得到一个预测误差,然后再经过一个放大器再经过一个零偏置电路得到一个双极性信号,双极性信号再通过一个限幅电路(相当于一个开关电路)把信号限制在0~3伏之间,信号再接入到一个比较器再加上CP 脉冲出来得到一个单极性信号,信号再经过一个单双变换把电压信号转换为双极性电流信号I 然后经过一个积分器和射随器得出一个反馈信号再接入到减法电路的一端。
增量调制总原理框图如图1-4所示:图1-4 增量调制设计原理框图反馈信号语音信号第二章单元电路设计2.1减法电路减法电路用来实现两个输入电压信号Vi1和Vi2相减的求差电路。
它的同相端和反相端输入0.3K-3.4K语音信号它与反馈信号,两个输入信号相减,得到一个预测误差。
输入信号Vi1和Vi2分别同相和反相放大,输出信号可以利用叠加原理得到,Vo=R4/R3(Vi2-Vi1),电路中R1=R2=R3=R4。
电路输出电阻很小,电路相当于理想运放电路模型。
减法电路电路图如下所示:图2-1减法电路电路图2.2 误差放大电路误差信号放大电路即一个射极偏置电路,对输入信号Vi进行放大并实现零偏置调整。
电路中电源分别接+12V和-12V,图2-2中通过一个共射极三极管与电阻形成一个直流通路,直流通路利用负反馈作用,达到自动稳定静态工作点的作用。
此电路通过调整一个滑动变阻器R19使得当Vi输入的值为0是,输出Vo的值也为0,这样就使得Vo的值跟随Vi的值变化而变化,让输出信号在0V上下变化,即实现了零偏置调整。
其电路图如下所示:图2-2误差放大电路图2.3 限幅电路限幅电路是由两个NPN型三极管及其他元器件组成的运放电路。
限幅电路按功能分为上限限幅电路、下限限幅电路和双向限幅电路三种。
在上限限幅电路中,当输入信号电压低于某一事先设计好的上限电压时,输出电压将随输入电压而增减;但当输入电压达到或超过上限电压时,输出电压将保持为一个固定值,不再随输入电压而变,这样,信号幅度即在输出端受到限制。
同样,下限限幅电路在输入电压低于某一下限电平时产生限幅作用。
双向限幅电路则在输入电压过高或过低的两个方向上均产生限幅作用。
三极管限幅电路是利用三极管进入截止区或饱和区后输出不再受输入的影响来实现限幅作用的。
这种电路形式上与放大电路相似,但工作点的选择应该有利于实现所需的限幅,而不是避免发生波形失真。
三极管限幅电路的优点是兼有放大作用。
两个三极管组成级联方式并各自工作在开关状态,通过设置各电阻的参数使得误差信号幅值限定在0~3V内变化,当输入为高电平时,三极管Q2导通,三极管Q3截止,使得输出的电压为0V;相反,当输入时低电平时第一个三极管Q2截止,第二个三极管Q3导通,分压使得输出V0的值为3V。
其电路图如下所示:图2-3限幅电路电路图2.4 判决电路定时判决电路采用D触发器来实现比较判决功能,由于通过限幅放大的输入信号的幅值在0—3V内变化,而由于D触发器由门电路组合而成即存在着较低的门限电压,利用这一特性实现对输入信号的判决。
时钟信号的频率为16K-32K。
每当来一个时钟信号,当CP脉冲为0时,触发器保持原状态,当CP为1时,接受端D出现两种情况,D等于1即是高电平时,相当于输入信号大于门限值即输出双极性的二进制编码,相反,当D等于0即为低电平时,输入小于门限值即输出单极性的二进制编码。
其电路图如下所示:图2-4 判决电路电路图2.5 单/双极性变换电路单/双极性变换即在两个三极管处于开关状态下完成二进制编码和电压变电流信号的转换。
三极管Q4和Q5工作在开关状态下轮流导通后,进过RC回路充放电,当Vi加高电平时,Q5管导通,Q4管截止。
此时Uo为高电平对积分器电容进行冲电;当Vi加入低电平时,Q5管截止,Q4管导通,Uo为低电平,积分器电容处于放电状态。
这种冲放电状态也就是所说的推挽功放。
在三极管处于开关状态对高低电平的选择性导通截止的状态下,完成了单双极性变换,电压信号变成电流信号、单极性变为双极性信号,完成简单增量调制的一个过程。
其电路图如下所示:图2-5 单/双极性变换电路图2.6积分电路积分电路电路原理很简单,都是基于电容的充放电原理,RC电路的积分条件:RC≥Tk。
具体是输入信号经过了一个电阻后经过反馈流到电容上,但此时认为电容电压的初始电量为零,故此时给电容充电。
由理想运算放大器的虚短、虚断性质得:V1=Ii=0,电容器初始电压Vc=0,则V1-Vo=1/c∫Iidt=1/c∫Vi/Rdt所以Vo=-1/(RC)∫Vidt。
上式表明,输出电压Uo为输入电压Ui对时间的积分,负号表示信号是从运放的反相输入端输入的。
当输入信号Ui为阶跃电压,在它的作用下,电容将以近似恒流方式进行充电,输出电压Uo与时间t成近似线性关系。
积分电路电路图如下所示:图2-6积分电路电路图2.7射极输出放大电路射极输出放大电路是一个输入信号与输出信号的公共端是三极管的集电极的共集电极放大电路。
其特点是输入信号与输出信号同相;无电压放大作用,电压增益小于1且接近于1,因此共集电极电路又有“电压跟随器”之称;电流增益高,输入回路中的电流iB<<输出回路中的电流iE和iC;输入电阻高,输出电阻低,既可以做多级放大电路的输入极,负载稳定,又可以做多级放大电路的输出级。
其电路图如下所示:图2-7 射极放大电路电路图第三章Systemview仿真与调试3.1 Systemview简介Systemview是一个用于现代工程与科学系统设计及仿真的动态系统分析平台。
从滤波器设计、信号处理、完整通信系统的设计与仿真,直到一般的系统数学模型建立等各个领域,Systemview在友好而且功能齐全的窗口环境下,为用户提供了一个精密的嵌入式分析工具。
Systemview是美国ELANIX公司推出的,基于Windows环境下运行的用于系统仿真分析的可视化软件工具,它使用功能模块(Token)描述程序。
利用Systemview,可以构造各种复杂的模拟、数字、数模混合系统和各种多速率系统,因此,它可用于各种线性或非线性控制系统的设计和仿真。
用户在进行系统设计时,只需Systemview配置的图标库中调出有关图标并进行参数设置,完成图标间的连线,然后运行仿真操作,最终以时域波形、眼图、功率谱等形式给出系统的仿真分析结果。
3.2 仿真步骤通过自己的学习,初步了解了Systemview的一些操作方法,我们也大概掌握了增量调制的实现原理,下面介绍仿真的步骤:1.理解增量调制原理,初步确定仿真所要求的元器件,在Systemview连好仿真图,并进行仿真;2.对初步仿真的结果进行核查,并找出比较合适的参数;3.找出比较合适的波形,并记录好各元器件的参数。
3.3仿真结果增量调制系统仿真图如下所示:图3-1系统仿真图高斯噪声经过低通产生300HZ-3400HZ模拟语音信号波形如图所示:图3-2 模拟语音信号波形图模拟语音信号经放大器误差放大以后,通过判决器进行判决输出简易△M增量调制脉冲波形图如图所示;图3-3 △M增量调制脉冲波形图增量调制输出信号经放大电路、减法器后再通过延时电路的输出延时波形如图所示:图3-4 延时波形图增量调制信号经过积分器、放大电路后的解调输出波形如图所示:图3-5 增量调制解调波形图第四章总电路图4.1总电路图第五章总结与体会期末的通信原理课程设计又将结束了,每一次的课程设计都会带来一次与众不同的体验,又一次经历了一个从迷茫到恍然大悟的激动过程。