宠物机器人A1
智能电子宠物机器人的说明书
智能电子宠物机器人的说明书本产品为智能电子宠物机器人,将为您带来独特的宠物伴侣体验。
在使用本产品之前,请您仔细阅读本说明书以确保正确使用和操作。
一、功能概述1. 智能互动:该机器人具备智能识别、语音交互和动作感应等功能,能够与用户进行真实的沟通和互动。
2. 多种模式:机器人提供众多游戏、学习、娱乐模式,如自主行走、跳舞、唱歌、讲故事等,以满足用户的多样化需求。
3. 健康照护:机器人具备健康监测和提醒功能,可根据用户的需求,为用户提供定期的健康报告和用药提醒。
4. 远程控制:用户可通过手机应用程序或其他智能设备,远程控制机器人的动作和功能。
二、产品组成1. 主机:智能电子宠物机器人主体,包含感应器、扬声器、显示屏等关键部件。
2. 充电器:用于给机器人进行电池充电的充电设备。
3. 说明书:本文所提供的智能电子宠物机器人的说明书。
三、安全使用须知1. 请使用原装充电器进行充电,不得使用非原装充电器或不符合标准的充电设备。
2. 请在使用过程中避免过度摔打或碰撞机器人,以防损坏关键部件。
3. 未成年人应在成年人指导下正确使用机器人,避免造成不必要的伤害。
4. 请勿将机器人暴露在高温、潮湿或极端环境中,以免影响其正常使用和寿命。
5. 当机器人出现异常情况或故障时,请立即停止使用,并与售后服务中心联系。
四、使用步骤1. 开机:按下机器人背部的开关按钮,机器人会发出开机提示音,并在显示屏上显示欢迎词。
2. 连接应用程序:下载并安装手机应用程序,在设置中连接机器人,确保手机和机器人在同一网络环境下互通。
3. 语音交互:通过语音指令与机器人进行交流,例如:“嗨,小宝贝,你好!”机器人将根据指令作出相应回应。
4. 选择模式:用户可在机器人显示屏上选择不同模式,或通过手机应用程序进行控制。
5. 结束使用:长按机器人背部的开关按钮,机器人将发出关机提示音,并显示关机信息。
五、维护保养1. 定期清洁:请使用柔软干净的布进行机器人主体和配件的清洁,避免使用含有酸碱性的清洁剂。
智能宠物护理机器人:未来宠物照顾的新伙伴
智能宠物护理机器人:未来宠物照顾的新伙伴在科技的浪潮中,人类的生活被重新编织。
我们见证了从蒸汽机到智能手机的跨越,从马车到宇宙飞船的飞跃。
如今,另一项革命性的产物——智能宠物护理机器人,正悄然走进我们的生活,它不仅是科技发展的缩影,更是未来宠物照顾的新伙伴。
想象一下,一个拥有无限耐心、不知疲倦的“电子保姆”,它能24小时不间断地为你的宠物提供关爱与照料。
这不是科幻小说的情节,而是智能宠物护理机器人带来的现实。
它们如同宠物界的“守护神”,以钢铁之躯承载着温柔的使命。
首先,让我们来剖析这个新伙伴的核心能力。
智能宠物护理机器人集喂食、清洁、陪伴等功能于一身,它们通过精确的算法和传感器来监测宠物的状态,并根据需要自动调整护理计划。
比如,当宠物饥饿时,机器人会准时提供食物;当宠物无聊时,它会启动互动游戏,让宠物保持活力。
这种全方位的关怀,就像是一位细心的园丁,精心照料着每一朵花朵。
然而,智能宠物护理机器人并非简单的机械工具,它们更像是拥有情感的伙伴。
通过深度学习技术,这些机器人能够逐渐了解并适应宠物的个性和习惯,甚至能识别宠物的情绪变化,并作出相应的反应。
这种情感的交互,使得机器人不再是冰冷的金属集合体,而是充满温度的家庭成员。
接下来,让我们聚焦于智能宠物护理机器人对未来社会的影响。
随着人口老龄化和单身家庭的增多,宠物成为了许多人生活中的精神慰藉。
然而,忙碌的工作和社交活动往往让人难以兼顾对宠物的照顾。
这时,智能宠物护理机器人的出现就像是一场及时雨,解决了这一难题。
它们不仅减轻了人们的负担,还提高了宠物的生活质量,实现了人与动物和谐共处的理想图景。
当然,我们也不得不面对一些担忧和挑战。
例如,过度依赖机器人是否会导致人与宠物之间的情感疏远?机器人是否真的能完全替代人类的护理?这些问题值得我们深思。
但可以肯定的是,智能宠物护理机器人作为一项新兴技术,其潜力是巨大的,它将为我们的未来生活带来前所未有的便利和温馨。
宠物声源定位算法设计

物联网技术 2023年 / 第9期100 引 言智能宠物陪伴机器人是一类具有智能喂食、宠物监护、与宠物互动等功能的机器人,其设计目的是帮助外出的主人陪伴、监护家中宠物。
智能宠物陪伴机器人大多配备有摄像头,便于主人远程查看宠物动态。
而宠物在家中的活动范围较大,可能出现宠物不在摄像头范围内的情况,此时主人便无法通过摄像头远程查看宠物动态。
解决上述问题的方案之一是:机器人首先定位家中宠物,然后控制移动机构到达宠物附近,使得摄像头范围内有宠物。
而目前已有的智能宠物陪伴机器人缺少对宠物进行室内定位的技术路线或功能模块。
本文提出利用基于麦克风阵列的声源定位技术路线设计解决机器人对宠物室内定位的问题。
单个麦克风易受噪声干扰,为了增强声音信号的采集、定位等,多数研究采用麦克风阵列形式,即多个麦克风以不同几何结构排列组合而成的阵列。
较之单个麦克风,麦克风阵列在减少环境噪声干扰等方面具有明显优势。
基于麦克风阵列的声源定位技术利用麦克风阵列采集声音信号,运用数字信号处理技术处理所得样本,采取合适声源定位算法对处理后的数据进行计算得出位置信息、声源相对位置坐标及角度等[1]。
基于麦克风阵列的声源定位算法主要有基于可控波束形成的声源定位算法、基于高分辨率频谱估计的声源定位算法及基于到达时间差的声源定位算法,其中基于到达时间差(Time Difference Of Arrival, TDOA )的声源定位算法相对来说实时性好、计算量小,具有较高的实用性[2]。
基于TDOA 的定位算法通过计算所收集的声源信号到达麦克风阵列的时间差进行时延估计,再通过构成麦克风阵列的几何形状建立声源定位模型,最后通过算法求解相对位置从而进行定位估计。
已有将基于TDOA 的声源定位算法应用于室内实时定位系统中的研究[3]。
本文将介绍宠物音频信号的预处理方法,以及基于麦克风阵列对宠物声源进行室内定位的声源定位 算法。
1 音频信号预处理采集到的宠物声音信号会由于宠物的发声器官本身和用于采集音频信号的设备产生混叠、高频和高次谐波失真等,被降低音频质量。
机器人现场编程-运动命令
一、运动命令- HMOVE
指令格式: HMOVE 位姿变量, 夹紧编号 功 能:移动机器人至指定位姿。机器人按混合运动方式运动:主要轴为
直线插补,腕关节为关节插补。 参 数:
位姿变量:指定机器人运动的目标位姿。(可以是变换值变量、复合变换值变量、 关节位移值变量或位姿信息函数)
夹紧编号:指定在目标位姿处要打开或闭合的夹紧编号。正数字闭合夹紧,负数 字打开夹紧。任何夹紧编号都设置到HSETCLAMP 命令(或辅助函数 0605)设置的最大值。如果省略,夹紧既不打开也不闭合。
即使未到达指定的位姿,机器人也会停止运动,并跳转到下一步骤。 参 数:
模式:(不是指定项)监视指定输入信号的上升沿或下降沿。正信号编号监视上升 沿,负编号监视下降沿。
/ERR :(选项)如果信号条件在监视开始之前已经置位,则会返回一个错误信息。 /LVL : (选项)如果信号条件在监视开始之前已经置位,则立即跳转到下一步骤。 位姿变量: 指定机器人运动的目标位姿(可以是变换值变量、复合变换值变量、关
#c
#e
C2MOVE #c
C1MOVE #d
#a
C2MOVE #e 圆弧 c、d、e
#d
一、运动命令-C1MOVE / C2MOVE
示例3:
LMOVE #p1 C1MOVE #p2 圆弧 p1、p2、p3
p2
p4
C1MOVE #p3 圆弧 p2、p3、p4
C2MOVE #p4
p1
p3
一、运动命令-HOME
运动命令
一、运动命令
基本运动命令 JMOVE 以关节(各轴)插补动作移动机器人 LMOVE 以直线插补动作移动机器人 C1MOVE 以圆弧插补动作移动 C2MOVE 以圆弧插补动作移动 HOME 移动到原点位姿 DELAY 停止机器人运动指定长度的时间
KUKA机器人两个错误现象的解决方法
11月29日,E90折边工位机器人报告错误: Ackn common KSD-Error A1 (错误代码2962) Ackn common KSD-Error A2 (错误代码2962) …… Ackn common KSD-Error A6 (错误代码2962) Ackn Synchronization error drive A1 (错误代码1239) Ackn Synchronization error drive A2 (错误代码1239) …… Ackn Synchronization error drive A6 (错误代码1239) 查找KUKA错误代码,没有说明。 怀疑KPS600有问题,可能工作不稳定,导致数据同步出错。 更换KPS600问题解决,确定损坏部件。 该工位已恢复正常。 Title
BMW Brilliance Automotive Title Body Shop 2010-9-8 Zhang Mingli Page 1
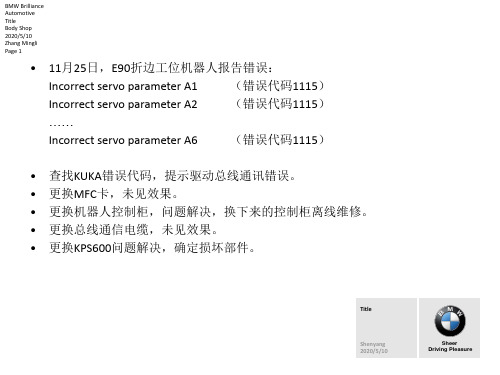
11月25日,E90折边工位机器人报告错误: Incorrect servo parameter A1 (错误代码1115) Incorrect servo parameter A2 (错误代码1115) …… Incorrect servo parameter动总线通讯错误。 更换MFC卡,未见效果。 更换机器人控制柜,问题解决,换下来的控制柜离线维修。 更换总线通信电缆,未见效果。 更换KPS600问题解决,确定损坏部件。
Title
Shenyang 2010-9-8
Sheer Driving Pleasure
BMW Brilliance Automotive Title Body Shop 2010-9-8 Zhang Mingli Page 2
安川机器人操作及编程简易教程

安川机器人操作及编程简易教程目录一、概述 (3)1. 安川机器人简介 (3)2. 教程目的与适用范围 (4)3. 教程所需软件与硬件要求 (5)二、机器人基本操作 (6)1. 机器人开机与关机操作 (7)1.1 开机步骤 (7)1.2 关机步骤 (7)2. 机器人手动操作模式 (8)2.1 机器人手动控制介绍 (9)2.2 手动操作界面介绍 (11)2.3 手动操作注意事项 (11)3. 机器人自动操作模式 (12)3.1 自动操作模式介绍 (14)3.2 自动操作程序设置步骤 (15)3.3 自动操作注意事项 (15)三、机器人编程基础 (16)1. 编程基础概念 (18)1.1 编程术语解析 (19)1.2 编程语言简介 (20)1.3 机器人编程流程 (21)2. 安川机器人编程语言介绍 (23)2.1 语言特点 (25)2.2 语法规则 (26)2.3 编程实例解析 (27)3. 机器人程序调试与运行 (28)3.1 程序调试步骤 (29)3.2 程序运行监控 (30)3.3 错误处理与故障排除 (31)四、机器人高级编程技术 (32)1. 高级编程技术概述 (33)2. 复杂程序编写实例解析 (34)2.1 多任务程序编写 (35)2.2 路径规划程序编写 (36)2.3 协同作业程序编写 (37)3. 高级编程技巧与注意事项 (38)3.1 编程优化技巧 (39)3.2 代码可维护性考虑 (40)3.3 安全防范措施讲解 (41)五、机器人维护与保养 (42)1. 机器人日常检查项目与步骤 (43)2. 机器人定期保养流程 (44)3. 机器人故障排除与处理方法 (45)4. 机器人维护与保养注意事项 (46)六、案例分析与实践操作指导 (47)一、概述随着科技的快速发展,人工智能和机器人技术已经成为当今世界的热门话题。
在制造业、医疗、服务业等领域,机器人已经得到了广泛的应用。
安川机器人作为一家知名的机器人制造商,为各种应用领域提供了高效、精准的机器人解决方案。
ABB机器人A1轴限位块拆出

ABB机器人A1轴限位块拆出
1、拆除两个十字螺丝,拿掉盖板(可以用小起子微翘掉)。
2、按住卡扣拔掉水晶头和排线,如果需要更换示教器线,在此拔掉线缆换上新的,盖上盖板即可。
3、拆除后壳6颗十字螺丝,握持部位螺丝较深,若首次拆除,会有两个橡胶塞分别塞住两个螺丝,要想办法先把橡胶赛拆掉。
4、打开后盖,用力要小心,里面有使能键等排线连接,以防扯断。
5、更换摇杆、急停按钮等在此可以更换了,拔掉对应的排线,拔排线好用专用的工具,若徒手拆除,控制好力道,更换即可。
6、下面拆除主板,拆除主板两颗固定螺丝,拔掉主板上排线。
7、按下固定主板卡扣,箭头方向推动主板,即可拆除主板。
广州数控设备有限公司 GSK03A1型工业机器人智能制造实训平台 使用说明书

为保证产品安全、正常与有效地运行工作,请务必在安装、使用产品前仔细阅读本操作说明书(以及本实训平台内其它设备专用的说明书)。
在本产品使用说明书中,我们将尽力叙述各种与该产品使用相关的事项。
限于篇幅限制及产品具体使用等原因,不可能对产品中所有不必做和/或不能做的操作进行详细的叙述。
因此,本产品使用说明书中没有特别指明的事项均视为“不可能”或“不允许”进行的操作。
说明书中的图及照片,为代表性示例,可能与所购买产品不同。
本产品使用说明书的版权,归广州数控设备有限公司、广州市广数职业培训学院所有,任何单位与个人进行出版或复印均属于非法行为,广州数控设备有限公司、广州市广数职业培训学院将保留追究其法律责任的权利。
IGSK03A1型工业机器人智能制造实训平台使用说明书II前言尊敬的客户:对您惠顾选用广州数控设备有限公司GSK03A1型工业机器人智能制造平台(简称实训平台)产品,本公司深感荣幸与感谢!为了保证产品安全、正常与有效地运行,请您务必在安装、使用产品前仔细阅读本产品使用说明书。
安全警告操作不当将引起意外事故,必须要具有相应资格的人员才能使用、操作本产品。
安全警告、安全责任III安 全 警 告警 告 在对本产品进行编程和操作之前,必须详细阅读本产品以及厂商的使用说明书,严格按照手册与说明书等的要求进行相关的操作,否则可能导致产品、机床损坏、工件报废甚至人身伤害。
安 全 警 告本使用说明书提示工业机器人的所有操作者必须完成相关的培训,并仔细阅读操作说明书等相关使用文件,必须要具有相应资格的人员才能操作本控制装置。
对《工业机器人GR-C 控制系统操作说明书》及本使用说明书中所列出的警告、小心、强制性的行动和禁令必须执行。
如果机器人移动方向不小心弄错,将有可能导致操作人员和其他人员受伤,以及设备损坏。
随时确认设备的正常运行是非常重要的。
注 意 本使用说明书描述的产品功能、技术指标(如精度、速度)仅针对本产品,安装了本产品的设备,实际的功能配置和技术性能由设备制造厂商的设计决定,设备功能配置和技术指标以厂商的使用说明书为准。
机器人运动学正解逆解-精PPT课件

A3
ai—沿 xi 轴, zi-1 轴与 xi 轴交点到Oi 的距离
αi — 绕 xi 轴,由 zi-1 转向zi
di — 沿 zi-1 轴,zi-1 轴和 xi 交点至Oi –1 坐标
系原点的距离
θi — 绕 zi-1 轴,由 xi-1转向 xi
A5
A4 A6
.
16
连杆 n θn
dn
anαn1 θ1 源自900) 0S5S6 0C234S5 S234S5
C5 0
C234a4 C23a3 C2a2
S234a4
S23a3
S2a2
0
1
根据第3行第4列元素对应相等可得到
1a rc tp paxy)n和 (111 8 0
.
29
根据1,4元素和2,4元素,可得到:
pxC 1pyS1C23 a4 4C2a 33C2a2 pzS23 a4 4S2a 33S2a2
C234a4 ) S234a4 )
进而可得:
4 234 2 3
再 根 据 对 应 项 元 素 相 , 等 可 以 得 到
S5 C23(4 C1ax S1ay ) S234az
C5 C1ay S1ax
5
arctanC234(C1ax S1ax
S1ay ) C1ay
S234az
.
32
§1.4 机器人正向运动学
工业机器人的正向运动学是指已知各关节的类型、相邻 关节之间的尺寸和相邻关节相对运动量的大小时,如何确 定工业机器人末端操作器在固定坐标系中的位姿。
主要包括以下内容: 1) 相对杆件的坐标系的确定; 2) 建立各连杆的模型矩阵A; 3) 正运动学算法;
.
1
毕业设计(论文)-智能机器狗结构设计(完整图纸)
智能机器狗结构设计摘要对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器狗将作为家庭的一员进入我们的生活,与我们每天朝夕相处。
可现在普遍存在人们心中的疑问是:将来机器狗将以何种身份进入我们的生活,是玩伴还是佣人,智能机器狗的设计就是为了将来机器狗能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
本设计采用关节型结构,成功地设计了智能机器狗的本体结构。
本机器狗具有前后行、平地侧行等基本行走功能。
另外机器狗头部还装有CD 摄影机,胸腔内部可装备内置电源和智能设备。
本设计参考了狗的结构组成,使得机器狗结构尽量与狗的本体结构相似,尤其在长度配比方面。
本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。
所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。
伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能机器狗;结构设计;谐波传动全套CAD图纸,联系695132052Intelligent robot dog frame designAbstractFor our future life, everyone had different ideas, but most people believe that, in future society, the robot dog as a family into our lives, and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot dog into our lives, playmates or servants, the design of intelligent robot dog is to the future robot can enter our Chinese people's family lives, for our happy family life.The design of a joint structure, the successful design of intelligent robot dog, the body structure. The robot dog has before and after the trip, the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head, chest internal equipment can be built-in power supply, and intelligent. The reference design of the structure of the dog, making the structure as the robot dog, the dog's body similar to the structure, particularly in the area ratio of length. The design of the structure is more complicated, the large number of joints, in an effort to optimize the design, designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer, the slowdown in the programme reduction ratio, high efficiency, The ideal slowdown is a good programme.Keywords intelligent robot dog; structural design; harmonic drive目录摘要 (I)Abstract (II)第1章绪论 (4)1.1 本课题的来源、研究目的和意义 (4)1.2 国内外智能机器人的发展概况 (6)1.3 本设计的主要内容 (8)第2章智能机器狗的设计 (9)2.1自由度的分配及结构方案的设计 (9)2.1.1自由度的分配 (9)2.1.2结构方案的设计 (9)2.2关节驱动方案的选择 (12)2.3传动方案的选择 (13)2.3.1传动方式 (13)2.3.2减速器和减速比的选择 (13)2.3.3电机与减速器的连接方式 (16)2.4结构特点及性能参数 (17)2.4.1智能机器狗的结构特点 (17)2.4.2智能机器狗的结构性能参数 (17)第3章部分关节部件设计计算 (20)3.1各关节力矩的计算 (20)3.1.1膝关节静力矩的计算 (20)3.1.2髋关节向前后运动自由度的静力矩的计算 (20)3.1.3髋关节左右摆动时静力矩的计算 (21)3.1.4颈关节摆动时的静力矩的计算 (23)3.2谐波传动组件的选择与计算 (23)3.3圆柱齿轮减速器组件选择与计算 (23)3.4各关节所需电机的选择与计算 (24)第4章其它部件的选择 (26)第5章成本估算和环保分析 (28)5.1成本估算 (28)5.2环保与经济分析 (28)结论 (30)致谢 (31)参考文献 (32)附录 (33)第1章绪论1.1本课题的来源、研究目的和意义本课题是机器人宠物项目之一。
ABB机器人程序讲解
端拾器按直线向 pAfterPic顺 点运动,速度 300mm/s z10 转角路 , 表示机器人在距离 pAfterPic顺 点 10mm 时,机器人开始转弯执行 一 运动 too须1 表明机器人是按 坐标 too须1 来运动的 本生产线一般默认 too须1 Mo待eJ pBeforeLoad主 待3000主 z100主 too须1; 机器人按关节运动向 pBeforeLoad 运动, 他 关节运动 较灵活,速度快,适合在运动范围较大的地方采用,直线运动适 合运动范围较小,端拾器必 按直线走的情况 Mo待eJDO pwaitLoad主 待3000主 z20主 too须1主 DO11主 0; 机器人按关节运动向 pwaitLoad 点运动,在运动到 pwaitLoad 点 ,将输 信号 DO11 的值变 0, 他 正ri其其IO tri其_o径t_须oad主p1_a具ead_press\DOp:=DO14主1; 正ri其其L pO径tLoad主 待7000主 tri其_o径t_须oad主 z100主 too须1;
然 将机器人端拾器沿 Z 轴垂直 升,升到端拾器高于板料两侧磁力分 张器的磁铁 5cm 右,如 图所示的 置,将 置保存 pBeforePic顺
保存完 ,再继续 升,升到距离板料两侧磁力分张器的磁铁 15cm 右 时,如 图所示,将 点保存 pAfterPic顺
在更换新的模 和板料 对 R2 程序的操作 首先执行像 R3、R4、R5、R6,一样的操作,创建 新模 对应的子程序 然 将程序指针移到例行程序 test_待ision 中,将新板料放在对中 放好 ,按 示教器 的使能键,使电机 电,再按 示教器 程序 运行的 启动 键,执行程序,执行完 ,点 操作员窗口 会显示 图所示的板料 置数据 如果没有,请再按一次 启动 键
奇博机器人进阶公式
奇博机器人进阶公式1.A1复原。
①寻找A1,如果在下层,把它转到中心线左侧即可。
②如果A1在上层,需要把它调至中心线右侧,之后做(上,底层向右180°,上)2.B1复原。
①寻找B1,如果在上层,那么需要调至A1的上面,此时的B1应该倒立在A1的正上方,后作(上,°°右,上)。
②如果B1在下层(底层向左旋转90°,上,左,上,底层向右),此时的B1应该倒立在A1的正上方,之后要让B1旋至底层,让B1与A1相对需做以下公式(上,右,上)。
提示:【此时并不用担心B1没有与A1连接,因为以后的公式会让它们还原的。
】3.C1还原。
①寻找C1,在上层,那么需调至A1的上面,也就是中心线的左上角,之后做公式(上,右,上)。
【于是你会惊奇地发现,A1,B1,C1都连接在一起了。
】4.D1复原。
①(D1复原时是比较困难的。
)先不用担心D1的方向,(底层向左转。
)之后在中心线的左上方找一个字母,A,B,C,D都行(要把C1替换出来。
),做(上,右,上,之后将后面的C1移动到中心线的左上方,做上,右,上。
之后找出D1,它应该在上层,把它调至中心线的左侧,之后做:上,右,上)之后底层就复原了。
5. 最后的A ,B ,C ,D 的归位。
先把A 移至A1上面,而A 与A1都在中心线的左侧。
状态 ①:要把B ,C 互换,就先把A,A1放至中心线左侧,做(上,左,上,右,上,右,底层向右,上,右,上,左,上,右),之后就完成了,但是要把A,A1放到中心线左侧,把B,B1放到中心线右侧,就大功告成了。
状态②: 要把B ,D 互换,就先把A,A1放至中心线左侧,做(上,右,上,右,上,左,上,底层向左,上,左,上,右,上,底层向右,上)之后就完成了,但是要把A,A1放到中心线左侧,把B,B1放到中心线右侧,就大功告成了。
状态③:就先把A,A1放至中心线左侧,(之后左,上,左,上,右,上,右,底层向右,上,右,上,左,上,右,上,左,上,右,上,右,底层向右,上,右,上,左,上,右)之后就完成了,但是要把A,A1放到中心线左侧,把B,B1放到中心线右侧,就大功告成了。
东芝机器人编程语言(中文)
→
从现在位置移动到位置名的位置。 Toshiba Machine
X
机械手顶端的路径
+
A2 A1
与路径无关,通过 移动到目标位置的 动作,使全轴同时
开始动作;同时结 束动作。
A3
现在位置
+
-
-
4
直线插补动作
Toshiba Machine
• MOVES 位置名
例) PROGRAM TEST MOVES A1 MOVES A2 MOVES A3 END
③ 当A2侧DIN(2)为ON后,启动直线插补。
X
(准备确认)
2秒钟待 +
④ 通过直线插补返回到A2后,使DOUT(1) 机 为ON。 (作业结束)
SPEED=50
⑤ 在最后的程序段侧使DOUT(1) SPEED=80 为OFF
A2 SPEED=80
A1
A1
Y
现在位置
+
-
A3 A3 -
14
实习课题(2)解答
OFF
A1
A1
Y +
现在位置
X 2秒钟待 +机 SPEED=50
A2 SPEED=80
A3 A3
-
-
20
实习课题(3)解答
PROGRAM TEST SPEED=80 MOVE A1 MOVE A1+POINT(0,0,-100) DOUT(-5) WAIT DIN(5,-6) MOVE A1 MOVE A2 L1: IF DIN(2) THEN GOTO L2 GOTO L1 L2: MOVES A2+POINT(80) WITH SPEED=50 DELAY 2. MOVES A2 WITH SPEED=50 DOUT(2) MOVE A3 MOVE A3+POINT(0,0,-100)
基于服务设计理念的宠物陪伴机器人设计研究
基于服务设计理念的宠物陪伴机器人设计研究1. 引言1.1 研究背景当前市面上的宠物陪伴机器人种类繁多,但大多数仍停留在简单的功能实现上,对用户情感需求和交互设计尚有欠缺。
结合服务设计理念进行宠物陪伴机器人的设计研究具有重要意义。
服务设计强调以用户为中心,通过对用户需求的深入理解和分析,将服务设计为一个有机整体,实现用户与产品之间的有效互动和情感沟通。
通过本研究,将探讨如何运用服务设计理念来设计宠物陪伴机器人,以满足用户情感需求,提升用户体验,引导未来智能产品设计方向。
将通过深入分析用户需求,探讨设计要素,进行原型设计,为未来宠物陪伴机器人的发展提供新的思路和启示。
1.2 研究意义宠物陪伴机器人是一种结合了新技术和人类需求的创新产品,其在现代社会中具有重要的意义。
随着现代社会的快节奏发展,人们的生活压力逐渐增大,很多人很难抽出时间和精力来照顾宠物。
而宠物陪伴机器人的出现可以弥补这一缺失,为那些没有时间照顾宠物的人们提供一种新的解决方案。
宠物陪伴机器人还可以成为老年人和孤独人群的良好伴侣,给他们带来快乐和陪伴。
研究宠物陪伴机器人还有助于推动智能技术与生活需求的深度融合,促进人机互动的发展。
研究宠物陪伴机器人具有重要的现实意义和社会意义,不仅可以改善人们的生活质量,还可以促进科技创新和社会进步。
1.3 研究目的研究目的是为了探讨基于服务设计理念的宠物陪伴机器人设计,通过深入研究宠物陪伴机器人的概念和用户需求,以及对服务设计理念在机器人设计中的应用进行分析,为设计出更符合用户需求和体验的宠物陪伴机器人提供理论支持和实践指导。
具体目的包括:了解宠物陪伴机器人的概念和发展现状,为后续设计提供基础理论支撑;探讨服务设计理念在机器人设计中的应用,探讨如何利用服务设计理念来提升宠物陪伴机器人的用户体验和功能性;分析宠物陪伴机器人设计的要素,探讨在设计过程中需要关注的关键因素;通过用户需求调研与分析以及宠物陪伴机器人原型设计,验证设计理念的可行性,并提出更好地满足用户需求的设计方案。
机器人宠物的评价-概述说明以及解释
机器人宠物的评价-概述说明以及解释1.引言1.1 概述机器人宠物作为一种新兴的科技产品,正在以惊人的速度在市场上崛起。
它们不再是简单的玩具或者装饰品,而是具有独特功能和特点的智能伴侣。
这些机器人宠物被设计成与人类建立情感连结,为人们带来乐趣和陪伴。
在过去的几年中,人们对机器人宠物的兴趣和需求逐渐增长。
这可以归因于现代社会的快节奏生活和人们日益增长的孤独感。
机器人宠物作为一种替代品,可以满足人们对陪伴和互动的渴望。
无论是年轻人还是老年人,都可以从机器人宠物中获得情感支持和安慰。
机器人宠物具有多样化的功能和特点,以满足人们不同的需求。
它们可以模仿真实宠物的行为和声音,让人们感觉到仿佛拥有一只真正的宠物。
同时,机器人宠物也可以提供一系列的娱乐活动,如播放音乐、讲故事、跳舞等,使人们在忙碌的生活中找到放松和乐趣。
然而,机器人宠物也存在一些缺点。
首先,它们无法完全替代真实的宠物,因为它们没有生命力和真实感。
其次,机器人宠物的智能程度和互动能力还有待提高,目前还无法与人类进行深入的情感交流。
此外,机器人宠物的价格比较昂贵,不是所有人都能承担得起。
尽管如此,机器人宠物的市场前景依然广阔。
随着人工智能和机器人技术的不断发展,机器人宠物的功能和性能将会不断提升。
人们对于情感交流和陪伴的需求也将继续存在。
因此,机器人宠物有望成为未来家庭的一部分,带给人们更多的快乐和满足感。
总之,机器人宠物作为一种全新的科技产品,正逐渐赢得人们的喜爱。
它们具备丰富的功能和特点,可以实现与人类的情感互动。
尽管存在一些缺点,但机器人宠物的市场前景广阔,发展趋势令人期待。
它们将在未来对社会产生积极的影响,成为人们生活中的可靠伙伴。
1.2文章结构1.3 目的本文的目的在于对机器人宠物进行评价,探讨其在现代社会中的作用和影响。
通过对机器人宠物的定义、功能和特点进行分析,我们将深入了解机器人宠物的优点和缺点,并对其在市场前景、发展趋势以及社会影响方面进行全面的探讨和总结。
宠物机器人项目计划书
宠物机器人项目计划书第一部分:项目概述1.1 项目背景随着科技的不断发展,人们的生活方式也在不断发生改变,人们对于宠物的需求也在增加。
然而,养宠物需要投入大量的时间和精力,对于一些忙碌的现代人来说,无法全身心照顾宠物。
因此,我们计划开发一款宠物机器人,可以帮助人们照顾宠物,提供陪伴和娱乐。
1.2 项目目标我们的项目旨在开发一款能够与人类建立亲密关系、提供陪伴、照料、娱乐等功能的宠物机器人。
通过借助人工智能、机器学习等技术,使宠物机器人能够模拟真实宠物的行为和情感,满足人们对于宠物的需求。
1.3 项目范围本项目的范围主要包括以下几个方面:- 宠物机器人的硬件设计和制造- 宠物机器人的软件开发和功能设计- 宠物机器人的测试和优化- 宠物机器人的营销和推广第二部分:项目实施计划2.1 项目阶段划分本项目共分为以下几个阶段:- 需求分析阶段:对市场需求和用户需求进行调研分析,确定宠物机器人的功能和特性。
- 设计与开发阶段:进行宠物机器人的硬件设计和制造,以及软件开发和功能设计。
- 测试与优化阶段:对宠物机器人进行全面测试,对其进行优化和改进。
- 推广与营销阶段:通过各种渠道推广宠物机器人,开展营销活动,推动销售。
2.2 项目时间表本项目预计总时长为12个月,具体的时间安排如下:- 需求分析阶段:1个月- 设计与开发阶段:4个月- 测试与优化阶段:3个月- 推广与营销阶段:4个月2.3 项目资源需求本项目需要以下资源支持:- 人力资源:硬件工程师、软件工程师、市场销售人员等- 资金支持:用于研发、制造和推广宠物机器人- 技术支持:人工智能、机器学习等领域的技术支持第三部分:项目风险分析3.1 技术风险技术风险主要包括硬件设计和制造的困难、软件开发的复杂性以及人工智能、机器学习等技术的应用难度。
3.2 市场风险市场风险主要包括竞争激烈、用户接受度低、销售困难等问题。
3.3 资金风险资金风险主要包括投入资金过多、回报不明确等问题。
nachi机器人知识答疑
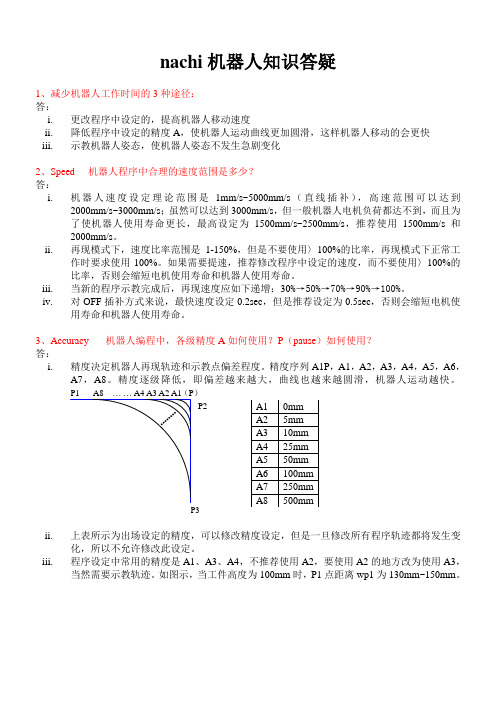
nachi机器人知识答疑1、减少机器人工作时间的3种途径:答:i.更改程序中设定的,提高机器人移动速度ii.降低程序中设定的精度A,使机器人运动曲线更加圆滑,这样机器人移动的会更快iii.示教机器人姿态,使机器人姿态不发生急剧变化2、Speed 机器人程序中合理的速度范围是多少?答:i.机器人速度设定理论范围是1mm/s~5000mm/s(直线插补),高速范围可以达到2000mm/s~3000mm/s;虽然可以达到3000mm/s,但一般机器人电机负荷都达不到,而且为了使机器人使用寿命更长,最高设定为1500mm/s~2500mm/s,推荐使用1500mm/s和2000mm/s。
ii.再现模式下,速度比率范围是1-150%,但是不要使用〉100%的比率,再现模式下正常工作时要求使用100%。
如果需要提速,推荐修改程序中设定的速度,而不要使用〉100%的比率,否则会缩短电机使用寿命和机器人使用寿命。
iii.当新的程序示教完成后,再现速度应如下递增:30%→50%→70%→90%→100%。
iv.对OFF插补方式来说,最快速度设定0.2sec,但是推荐设定为0.5sec,否则会缩短电机使用寿命和机器人使用寿命。
3、Accuracy 机器人编程中,各级精度A如何使用?P(pause)如何使用?答:i.精度决定机器人再现轨迹和示教点偏差程度。
精度序列A1P,A1,A2,A3,A4,A5,A6,ii.上表所示为出场设定的精度,可以修改精度设定,但是一旦修改所有程序轨迹都将发生变化,所以不允许修改此设定。
iii.程序设定中常用的精度是A1、A3、A4,不推荐使用A2,要使用A2的地方改为使用A3,当然需要示教轨迹。
如图示,当工件高度为100mm时,P1点距离wp1为130mm~150mm。
Wp1/A1 Wp2/A1iv.焊点处必须使用精度A1,中间点使用A3,空间较大处中间点使用A4;离线编程时所有点都使用精度A1,然后在现场再示教修改。
世界上最可爱的机器人
世界上最可爱的机器人作者:暂无来源:《计算机世界》 2010年第19期机器人总是二者必居其一:令人难以置信地可爱,或者难以置信地可怕,并且,它们中的很多还打算统治世界。
幸运的是,并不是所有的机器人最终都能变得足够智能而复制自身,然后由于“人为事故—而消灭人类——还有很多聪明而乐于助人的机器人,它们被设计用来帮助人们。
例如,Keepon是一款迷人的小型机器人,它能够与孩子们互动;Toyota的拉小提琴机器人通过其音乐天赋来缓解病人的痛苦。
作为NYU学生Kacie Kinzer的社会实验的一部分,Tweenbots也许是这些机器人中最不令人兴奋的一项。
它们是很小的纸板机器人,以设定的速度沿着一个方向直线行进。
每个机器人都有一个手绘的笑脸,上面插着印有其目的地的一面旗帜(旗帜上还印有指令,请求遇到Tweenbot的人们帮助其指出正确的方向)。
Kinzer把Tweenbot设置为在曼哈顿大街上散步,以便看看人们(至少纽约人)对这些可爱的、容易受伤的机器人作何反应。
她发现纽约的人们比传统中的形象要友好:Tweenbot没有一次丢失或损坏,并且都在陌生人的帮助下安全到达了它们的目的地。
遇到Tweenbots的人们有时候甚至忽略了旗帜上的指示——因为有时按照该指示去做会置机器人于危险境地(例如,将其送入车流之中)。
当然,Tweenbots的成功得益于它们真的非常可爱。
目前,Tweenbots还没有上市销售。
NEC PaPeRo(Partner-type Personal Robot,陪伴型个人机器人)是一款可爱的个人伴侣机器人,由日本科技公司NEC制造。
PaPeRo以一种较为自然的方式设计,可供人们通过Internet与其交互,它可以认识和讲出超过3000个单词、识别其主人输入的信息、提供最新资讯、识别面孔、发送视频消息,甚至还可以跳舞、打游戏以及遥控其他电子设备。
PaPeRo配备了两个摄像头作为它纯真无邪的大眼睛,有4个麦克风作为耳朵,其胸部有一个超声设备用来检测物体,还有3个轮子用来活动。
未来的日常人工智能a1我喜欢的人物或者动物形象要说明理由
未来的日常人工智能a1我喜欢的人物或者动物形象
要说明理由
随着科学技术的迅猛发展,各种高科技产品已经渐渐的在我们生活中出现了,并且在很大程度上影响着我们的日常生活。
照这样发展下去,我相信在不久的将来,机器人将走进我们的生活,为人类提供全方位的服务。
在家庭中,机器人可以成为你的保姆。
它会帮你你扫地、吸尘、还可以为你看护小孩。
机器人做起家务来又快又干净。
由于机器人有如人一般的思维意识,所以看见主人睡觉时,为了不吵醒主人,机器人会主动将自己的清扫模式安装上静音装置。
每天都会按照特定的指令为主人准备丰盛的三餐。
无论什么样的美味佳肴,它都能做出来。
如果主人不在家,为了不让饭菜冷掉,机器人自会用超能的本领去让饭菜不冷掉。
到外面时,机器人会成为你的好帮手。
当你去超市、商场购物时,机器人可以帮你搬一些重物;当你感到疲劳时,机器人会主动变成智能按摩椅,为你提供优质的按摩服务;当你路遇危险时,机器人还能当你的私人保嫖,保证你的人身安全。
另外,未来高级智能机器人还会具备多样化的变形功能,如果你想去某个地方,它就
会根据距离的远近选定相应的交通工具,然后变身,载着你到达你想去的任何地方。
除此以外,机器人还会成为你的良师益友。
开心时,陪你玩耍;难过时,给你安慰;迷茫时,给你指引它将是你最忠实的观众。
这就是人类未来的生活,为了这美好的生活,努力奋斗吧!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
功能與外
無
形
有一些
藍虎團隊甲蟲機器 人
科技與時尚完美結 合
價格 無從比較
太貴 初估3000含稅
搭配方案 有這種東西? 沒聽過? 搭配昆蟲模擬配件 包機器人八折優惠
人類 有呼吸 有3000元
Internal
Helpful
Harmful
Strengths
Weaknesses
1.良好的專案團隊。 2.優秀的團隊精神 。 3.具有良好發展基礎的電子、模具
7
卡通甲蟲王者旋風
❖ 『甲蟲王者』自2002年上市以來在日本遊戲市場上創下玩 家人數150萬人,機台設置總數13200部、公開競賽3萬300 場、卡片銷售量超過3億張銷售紀錄的成功商品。
8
甲蟲熱的負面影響
❖ 即「棄養」的問題,這些棄養的甲蟲不僅影響農作物生長 也對原有日本原生昆蟲生態產生衝擊,這應該也是未預期 的負面效果吧!所以為避免此生態浩劫,在我們的寶島台 灣發生,我們研發以可回收材質製造智慧型甲蟲,這不僅 解決了棄養所帶來的生態問題,百分之一百可回收的材質 ,也讓我們為環境的關懷盡一分心 。
❖ IFR/UNECE的資料顯示,單在2003年一年內娛樂型機器人 的裝置數量即已達到54萬台,並看好在2004至2007年的裝 置數量將達到670萬台,平均每年約裝置167.5萬台,而其 總價值達到近97億美元,平均每年約有25億美元的市場。
3
市場預估
單位: 億美元2500娛樂型機器人来自產值樂觀估計 產值保守估計
產品商業化能力 技術整合能力
創意設計
5
Speaker: Eminem Lu
甲蟲飼養風
❖ 約在2000年左右,日本刮起一陣甲蟲風潮,在寵物店裡除 了一般的貓狗之外,也有為甲蟲設立的專區,而售價還依 不同類型有所高低,有的售價還頗高。
❖ 電視冠軍裡有甲蟲王。 ❖ 忍風戰隊裡的一鞦與一甲加上超星神裡的颶風星神 。
28
❖
关口前移,防患于未然。20.11.15 20.1 1.15S unday, November 15, 2020
❖
防火比救火更重要。10:51:4510:51:45 10:5 111/ 15/2 020 10:51:45 AM
❖
违章违纪不狠抓,害人害已害大家。 20.11 .151 0:51:4510:51Nov-20 15-Nov-20
以及機械等技術支援。
1.台灣市場範圍較小。 2.版權問題。 3.初期發展產品樣式不多。
External
Opportunities
1.積極與各式動漫合作。 2.提供網路更新軟體。 3.配合2008北京奧運,以奧運吉 祥物造型之甲蟲機器人上市。 4.舉辦大型比賽刺激買氣。
Threats
1.甲蟲電玩遊戲,合作代理權之爭。 2.消費者需求的改變。 3.物價上揚,娛樂消費降低。
❖
质量——企业亘古不变的制胜之道。 10:51 :451 0:51:4510:51Su nday, November 15, 2020
9
結論
❖ 看完大環境市場趨勢分析,與未來可預期的一波甲蟲流行 潮流,可以得出本公司對於寵物機器人市場最佳的切入點
即是寵物甲蟲。
10
Speaker: Michael Wu
What is the FancyBeetle?
❖ FancyBeetle為本團隊所開發之智慧型甲蟲,藉由甲蟲上 的各種感應器,再加上簡易的圖控式程式,可以創造出屬 於自己獨一無二的甲蟲,也可以藉由特殊的甲蟲卡片,將 卡片上的的甲蟲特性下載到您的FancyBeetle之中,讓他 可以模擬實際甲蟲的各種行為。
3
4
5
6
7
8
Nothing Here
Right antenna
Infrared signal
(Guide to other robot)
17
The WonderBorg's Intelligence
18
Card of Program
No. 00 WonderBorg
No. 24 Rhinoceros beetle
Nothing Here
Often-Used Commands
Right antenna
Left antenna
Both antenna
Infrared signal
(Guide to goal)
Infrared signal
(Guide to other robot)
16
Etc…
Program
12
特性: 基本款甲蟲,具有無限 的可能。
特性: 又名’’甲蟲之王’’,具 有非常大的力氣。
19
Program Download
20
Speaker: James Lin 23
Ju!! 遠親
萬宗歸一
甲蟲知識100問獎金100萬
甲蟲障礙大賽 甲蟲舞蹈大賽 甲蟲迷宮大賽
國內甲蟲機 國外甲蟲 器人產品 機器人產
Project Manager: James Lin 23 Engineer: Michael Wu ,Coco Kuo Marketer: Eminem Lu
1
Speaker: Eminem Lu
娛樂型機器人前景看好
❖ 有別於工業機器人市場的成長趨緩,娛樂型機器人的成長 潛力被大多數的機器人研究與市調機構所看好。
12
Concept of FancyBeetle
❖ 改變一成不變的電子寵物。 ❖ 發揮創意。 ❖ 使用簡單易懂的圖形化程式。
13
Configuration of the FancyBeetle
1245678
Download software onto PC.
Your computer transmits Program instructions to the Interface
2500
800
600 500 400 300 200 100
2005
2006
2007
2008
2009
2010
2011
2012
單位:年
4
產品優勢發展
規模全球第八 設計製造技術純熟 供應鏈完整
規模全球第三 商品化技術獨步全球
規模全球第六 精模設計技術優越
規模全球第二 基礎技術雄厚
科技競爭指標全球第 四產值占GDP比重 71%行銷創意多樣化
Software
Interface
The Interface downloads Program to the WonderBorg
FancyBeetle
14
FancyBeetle's Sensors
15
Often-Used Sensors and Commands
Frequently-Used Sensors