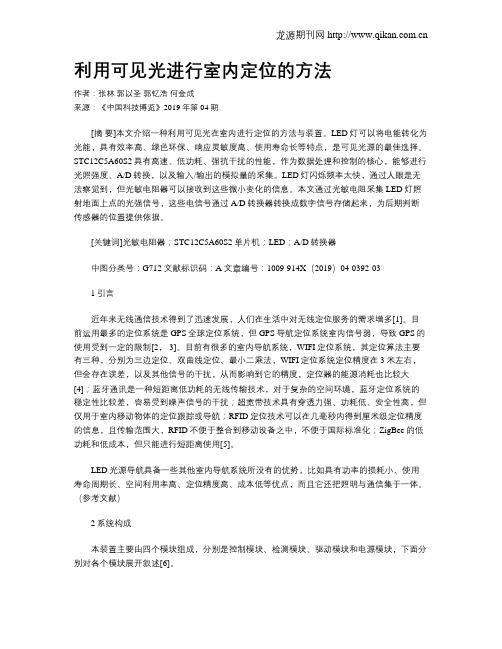
可见光室内定位三个球相交
八种无线室内定位方案对比
八种无线室内定位方案对比无线室内定位是指通过无线通信技术实现对移动设备或人员在室内位置的准确定位。
随着无线通信技术的不断发展和智能设备的普及,室内定位已经成为了一个重要的研究领域。
本文将对八种常见的无线室内定位方案进行对比,分别是Wi-Fi定位、蓝牙定位、红外定位、超宽带定位、ZigBee定位、可见光通信定位、声波定位和射频识别定位。
首先是Wi-Fi定位。
Wi-Fi定位是利用Wi-Fi信号的强度和信号传播模型来进行定位。
优点是成本较低,覆盖范围广。
缺点是定位精度可能较低,受到信号干扰的影响较大。
其次是蓝牙定位。
蓝牙定位是通过蓝牙信号的强度和传输时间来进行定位。
优点是定位精度较高,适合实时定位应用。
缺点是成本较高,覆盖范围相对较小。
然后是红外定位。
红外定位是通过红外信号的强度和传播时间来进行定位。
优点是定位精度较高,适合小范围室内定位。
缺点是需要一定数量的红外发射器和接收器,成本较高。
接下来是超宽带定位。
超宽带定位是通过超宽带信号的传输延迟和多路径效应来进行定位。
优点是定位精度非常高,适合高精度定位应用。
缺点是成本较高,对硬件要求严格。
然后是ZigBee定位。
ZigBee定位是通过ZigBee信号的强度和传输时间来进行定位。
优点是能够实现低功耗和长距离通信。
缺点是定位精度可能较低,受到信号干扰的影响较大。
再者是可见光通信定位。
可见光通信定位是通过LED灯光的亮度和颜色变化来进行定位。
优点是能够与照明系统无缝集成,定位精度较高。
缺点是需要大量的LED灯和相应的传感器,成本较高。
然后是声波定位。
声波定位是通过声波信号的传播时间和多路径效应来进行定位。
优点是成本较低,适合小范围室内定位。
缺点是定位精度可能较低,受到环境噪声的影响较大。
综上所述,不同的无线室内定位方案具有不同的优点和适用范围。
选择合适的定位方案应根据具体的应用场景和需求来确定。
同时,不同的定位方案也可以结合使用,以提高定位精度和可靠性。
无线室内定位技术的发展还需要进一步研究和创新,以满足不断增长的需求。
基于可见光通信技术的室内定位设计与实践
基于可见光通信技术的室内定位设计与实践室内定位是指利用技术手段在室内环境中确定或追踪物体或人员的位置信息。
在日常生活和工作中,室内定位具有广泛的应用场景,如无线定位导航、智能家居系统、室内导航等。
而基于可见光通信技术的室内定位系统具有较高的精度和稳定性,被广泛应用于各个领域。
本文将探讨基于可见光通信技术的室内定位的设计与实践。
首先,我们需要了解可见光通信技术的原理。
可见光通信技术是利用可见光范围内的光波进行数据传输的一种通信方式。
它通过利用LED灯或荧光灯等光源产生的可见光进行信息传递。
在室内定位中,我们可以使用这种技术来实现定位系统。
基于可见光通信的室内定位系统通常由发送端和接收端组成。
发送端利用LED灯或其他光源发出光信号,接收端根据接收到的光信号进行距离测量,从而确定物体或人员的位置。
其次,室内定位系统的设计需要考虑多个因素。
首先是光源的布置。
光源应该均匀分布在室内空间中,避免盲区的产生,以获得更准确的定位结果。
其次是接收端的设计。
接收端通常由光传感器和计算设备组成。
光传感器用于接收光信号,并将其转化为电信号。
计算设备则根据接收到的光信号进行距离测量和定位计算。
此外,室内定位系统还需要考虑室内环境的干扰因素,如光线强度的变化、遮挡物、反射等,以减少误差。
在实践中,室内定位系统的设计和部署需要遵循以下步骤。
首先,进行室内场地的勘测和规划。
通过勘测室内环境,确定合适的光源位置和数量,并考虑遮挡物、光线强度等因素。
其次,选择合适的硬件设备。
根据场地的大小和需求,选择适合的LED灯或光源和光传感器。
然后,搭建室内定位系统的硬件平台。
根据设计需求,将光源和光传感器进行布置,并连接计算设备。
最后,进行系统的测试和调整。
通过收集和分析实时数据,调整系统参数,以提高定位的精度和稳定性。
基于可见光通信技术的室内定位系统具有多个优点。
首先,可见光通信技术不会对人体健康产生影响,相比其他技术如射频定位等更加安全。
室内可见光定位的原理
室内可见光定位的原理
室内可见光定位的基本原理如下:
1. 发射器布置
在室内天花板等高处布置多个可见光发射器,形成发射器阵列。
2. 编码发射
每个发射器发出编码唯一的可见光信号,一般为高频闪烁光。
3. 摄像头采集
目标对象头戴或携带照相机,对室内区域进行全方位拍摄。
4. 解码识别
通过图像处理算法,识别摄像头视野内可见光发射器的位置。
5. 距离解析
根据每个发射器的视线角度,解析出目标对象与发射器的方位和距离。
6. 三角计算
利用多个发射器与目标对象形成的距离构成三角网,求解目标的空间坐标。
7. 数据融合
结合惯性传感器等数据进行融合,校正定位坐标结果。
8. 跟踪定位
当目标在室内移动时,持续重复上述过程,实时测量目标的空间坐标。
9. 抗干扰设计
采用调制编码、滤波识别等技术,提高对室内复杂光线的抗干扰能力。
10.网络协同
多个目标同时定位时,需要进行网络协同,避免信号冲突。
综上所述,这种室内可见光定位方式,具有准确、稳定、低成本等优点,可广泛用于
各种室内导航和定位应用。
可见光通信技术在室内定位中的应用
可见光通信技术在室内定位中的应用随着科技的发展,现代人们的生活方式发生了翻天覆地的变化,人们渐渐地从传统的辛勤劳作转向了更加自由和舒适的生活方式。
同时,随着激烈的市场竞争,以及用户对数据价值的不断提高,对于室内定位技术的需求也越发迫切。
在这个背景下,基于可见光通信技术的室内定位技术逐渐被人们所熟知和认可,成为了当今室内定位技术领域的研究热点。
本文探讨可见光通信技术在室内定位中的应用。
一、室内定位的现状与挑战在室外环境下,全球定位系统(GPS)已经成为了一种不可或缺的技术,但是在室内环境下,独立的GPS定位系统由于受到建筑物、人群干扰等因素的影响而难以取得满意效果。
虽然使用无线信号可以实现室内定位,但是现有的室内定位技术存在一些局限性。
例如,射频信号的穿透力较弱,容易被楼层、墙面、隔断等建筑障碍物所阻挡,从而导致数据传输量减少,定位精度不高。
此外,射频信号也易受到干扰,而且频段资源紧张,容易出现干扰现象。
二、可见光通信技术在室内定位中的优势相对于使用射频信号的定位技术,可见光通信技术(VLC)在室内定位中具有独特的优势。
可见光通信技术使用的是可见光范围内的LED发射器和接收器,具有更高的载频数量和带宽范围,从而可以提供更高的数据传输速率和更低的传输延迟。
此外,基于可见光通信技术的室内定位系统能够对电力、市政、工业式建筑等领域进行精细区域管理,保证室内环境的安全稳定,实现对于空间的精细把控。
三、可见光通信技术在室内定位中的实现使用可见光通信技术进行室内定位需要在室内安装相应的LED灯和接收器,LED灯充当了信号发射器的角色,而接收器可以是智能手机、智能手表等设备。
在基于可见光通信技术的室内定位系统中,LED灯发射出一些特定的信号,接收器捕捉这些信号,系统接着将这些信息与已有的地图和数据进行匹配,并根据设备反馈信号计算出设备所处的位置,从而实现室内定位。
相比于其他的定位方式,基于可见光通信的室内定位具有诸多优势。
可见光通信平板光源高精度视觉室内定位方法
可见光通信平板光源高精度视觉室内定位方法摘要:随着可见光通信技术和室内定位技术的不断发展,可见光通信平板光源越来越多地应用于室内定位系统中。
本文提出了一种高精度视觉室内定位方法,通过使用可见光通信平板光源,结合双目视觉系统和卡尔曼滤波算法,实现了对物体的高精度定位。
实验证明,该方法具有较高的定位准确性和鲁棒性。
1.引言
2.双目视觉系统
双目视觉系统是指使用两个摄像头来模拟人眼的视觉系统。
在本方法中,通过放置两个摄像头来构建双目视觉系统,其中一个摄像头用于接收可见光通信平板光源发送的信号,另一个摄像头用于辅助定位。
3.平板光源识别
首先,通过对平板光源进行预处理,提取其中的特征点。
然后,使用特征点匹配算法将两个摄像头中的特征点进行匹配,得到平板光源的位置信息。
4.双目视觉系统定位
通过将两个摄像头的位置信息进行配准,得到实际物体在双目视觉系统中的位置。
然后,使用卡尔曼滤波算法对位置信息进行滤波和预测,实现对物体的高精度定位。
5.实验结果
在实验中,我们使用了一台可见光通信平板光源和两个摄像头来验证我们的方法。
实验结果表明,我们的方法能够实现对物体的高精度定位,并且具有较高的定位准确性和鲁棒性。
6.结论
本文提出了一种利用可见光通信平板光源实现高精度视觉室内定位的方法。
通过结合双目视觉系统和卡尔曼滤波算法,我们能够实现对物体的高精度定位。
实验结果证明了该方法的有效性和可行性。
未来,我们将进一步优化算法以提高定位准确性和实时性,以满足实际应用的需求。
可见光定位原理
可见光定位原理
可见光定位是一种利用可见光传感器进行定位的技术。
其原理是通过测量目标物体或地点处的光信号,来确定其位置。
在可见光定位中,我们使用的是可见光传感器来探测光信号。
这些传感器通常包括光敏元件和信号处理电路。
当光线照射到光敏元件上时,它会产生电流或电压信号,这些信号随后被信号处理电路处理和分析。
在定位过程中,我们需要放置多个传感器来同时接收光信号。
通过对这些信号进行比较、分析以及三角测量,我们可以确定目标物体或地点的位置。
这是因为当光信号从发光源传播到不同的传感器时,会经历不同的路径和时间延迟,这些信息可以用来计算位置。
可见光定位的应用非常广泛。
例如,在室内导航系统中,可见光定位可以帮助人们快速准确地找到目标位置。
在无人驾驶车辆中,可见光定位可以用来检测周围的道路和障碍物,以实现自动导航。
此外,可见光定位还可以应用于机器人导航、智能家居系统等领域。
总的来说,可见光定位利用可见光传感器测量光信号,通过分析不同传感器接收到的光信号来确定目标物体或地点的位置。
通过其广泛的应用,可见光定位为我们提供了一种精确、可靠的定位方法。
可见光室内定位技术研究
可见光室内定位技术研究随着科技的不断发展,定位技术已经广泛应用于各个领域。
在室内定位领域,可见光室内定位技术作为一种新型的定位技术,具有精度高、稳定性好、抗干扰能力强等优点,引起了人们的广泛。
本文将对可见光室内定位技术进行详细的研究,介绍其研究现状、技术原理、实验设计、结果与讨论以及结论。
研究现状可见光室内定位技术的研究始于20世纪90年代,当时主要利用红外线进行定位。
随着可见光通信技术的发展,研究者们开始尝试利用可见光进行室内定位。
目前,国际上对于可见光室内定位技术的研究主要集中在欧洲、美国和日本等国家和地区,国内的研究起步较晚,但发展迅速。
技术原理可见光室内定位技术的原理主要是通过光捕捉、图像处理和机器学习等技术实现。
光捕捉主要是利用可见光的光谱特性和空间特性,获取待定位目标的位置信息;图像处理主要是对捕捉到的光信号进行处理,提取出待定位目标的位置和姿态信息;机器学习则是通过对大量的数据进行学习,提高定位算法的精度和稳定性。
实验设计为了验证可见光室内定位技术的效果,我们进行了一系列实验。
我们搭建了一个可见光通信系统,包括LED灯、光捕捉装置、图像处理设备和机器学习算法等;我们采集了大量的实验数据,包括不同位置、不同姿态下的光信号数据;我们采用基于神经网络的机器学习方法,对数据进行分析和处理,并对比传统定位技术进行实验验证。
结果与讨论通过实验对比,我们发现可见光室内定位技术具有较高的定位精度和稳定性,其误差在厘米级以内。
同时,该技术的抗干扰能力强,对于环境光线、人员走动等因素的干扰能够进行有效的抑制。
然而,该技术也存在一些问题,如定位距离较近、硬件设备成本较高等。
为了解决这些问题,我们提出了一些改进方案,如采用多LED灯阵列、优化图像处理算法等。
可见光室内定位技术作为一种新型的室内定位技术,具有精度高、稳定性好、抗干扰能力强等优点。
本文通过对该技术的研究现状、技术原理、实验设计、结果与讨论以及结论的详细阐述,证明了可见光室内定位技术在室内定位领域的广泛应用前景。
利用可见光进行室内定位的方法
利用可见光进行室内定位的方法作者:张林郭以圣郭钇浩何金成来源:《中国科技博览》2019年第04期[摘要]本文介绍一种利用可见光在室内进行定位的方法与装置。
LED灯可以将电能转化为光能,具有效率高、绿色环保、响应灵敏度高、使用寿命长等特点,是可见光源的最佳选择。
STC12C5A60S2具有高速、低功耗、强抗干扰的性能,作为数据处理和控制的核心,能够进行光照强度、A/D转换,以及输入/输出的模拟量的采集。
LED灯闪烁频率太快,通过人眼是无法察觉到,但光敏电阻器可以接收到这些微小变化的信息。
本文通过光敏电阻采集LED灯照射地面上点的光强信号,这些电信号通过A/D转换器转换成数字信号存储起来,为后期判断传感器的位置提供依据。
[关键词]光敏电阻器;STC12C5A60S2单片机;LED;A/D转换器中图分类号:G712 文献标识码:A 文章编号:1009-914X(2019)04-0392-031引言近年来无线通信技术得到了迅速发展,人们在生活中对无线定位服务的需求增多[1]。
目前运用最多的定位系统是GPS全球定位系统,但GPS导航定位系统室内信号弱,导致GPS的使用受到一定的限制[2, 3]。
目前有很多的室内导航系统,WIFI定位系统,其定位算法主要有三种,分别为三边定位、双曲线定位、最小二乘法,WIFI定位系统定位精度在3米左右,但会存在误差,以及其他信号的干扰,从而影响到它的精度,定位器的能源消耗也比较大[4];蓝牙通讯是一种短距离低功耗的无线传输技术,对于复杂的空间环境,蓝牙定位系统的稳定性比较差,容易受到噪声信号的干扰;超宽带技术具有穿透力强、功耗低、安全性高,但仅用于室内移动物体的定位跟踪或导航;RFID定位技术可以在几毫秒内得到厘米级定位精度的信息,且传输范围大,RFID不便于整合到移动设备之中,不便于国际标准化;ZigBee的低功耗和低成本,但只能进行短距离使用[5]。
LED光源导航具备一些其他室内导航系统所没有的优势,比如具有功率的损耗小、使用寿命周期长、空间利用率高、定位精度高、成本低等优点,而且它还把照明与通信集于一体。
基于可见光的AGV室内定位方法研究
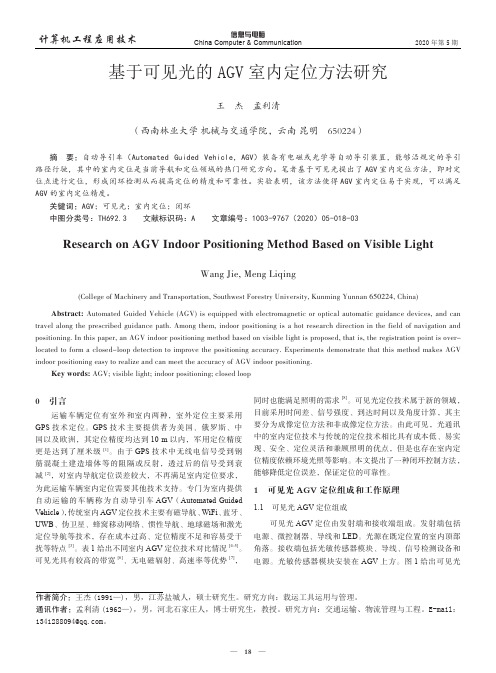
2020年第5期信息与电脑China Computer & Communication计算机工程应用技术基于可见光的AGV 室内定位方法研究王 杰 孟利清(西南林业大学 机械与交通学院,云南 昆明 650224)摘 要:自动导引车(Automated Guided Vehicle,AGV)装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,其中的室内定位是当前导航和定位领域的热门研究方向。
笔者基于可见光提出了AGV 室内定位方法,即对定位点进行定位,形成闭环检测从而提高定位的精度和可靠性。
实验表明,该方法使得AGV 室内定位易于实现,可以满足AGV 的室内定位精度。
关键词:AGV;可见光;室内定位;闭环中图分类号:TH692.3 文献标识码:A 文章编号:1003-9767(2020)05-018-03Research on AGV Indoor Positioning Method Based on Visible LightWang Jie, Meng Liqing(College of Machinery and Transportation, Southwest Forestry University, Kunming Yunnan 650224, China)Abstract: Automated Guided Vehicle (AGV) is equipped with electromagnetic or optical automatic guidance devices, and cantravel along the prescribed guidance path. Among them, indoor positioning is a hot research direction in the field of navigation and positioning. In this paper, an AGV indoor positioning method based on visible light is proposed, that is, the registration point is over-located to form a closed-loop detection to improve the positioning accuracy. Experiments demonstrate that this method makes AGVindoor positioning easy to realize and can meet the accuracy of AGV indoor positioning.Key words: AGV; visible light; indoor positioning; closed loop作者简介:王杰(1991—),男,江苏盐城人,硕士研究生。
基于可见光的室内定位研究
基于可见光的室内定位研究基于可见光的室内定位研究随着无线通信技术的飞速发展,人们对室内定位技术的需求也越来越大。
传统的GPS定位在室内环境中面临信号穿透性差、精度低等问题,因此需要一种适用于室内环境的定位技术来满足人们的需求。
基于可见光的室内定位技术因其具有易获取、无干扰、精度高等优势,成为研究热点之一。
基于可见光的室内定位技术主要利用LED灯或光通信设备输出的光信号与接收设备进行通信,并通过对光信号进行分析和处理,提取出位置信息。
具体而言,可将该技术分为两个阶段:发射和接收。
在发射阶段,LED灯或光通信设备通过发射特定频率或编码的光信号,将位置信息传达到室内环境中。
不同位置的灯具可以发射不同频率或编码的光信号,在室内环境中形成一个光信号图案。
这一步骤的关键是设计合理的光信号发射方案,确保不同位置的光信号能够互不干扰地进行传输。
在接收阶段,接收设备接收到光信号后,通过解调和解析等操作,提取出位置信息。
接收设备通常由摄像头和处理器组成。
摄像头将接收到的光信号转换为数字信号,并传输给处理器进行分析和处理。
处理器会根据接收到的光信号图案,通过比对预设的光信号图案数据库,确定接收设备所处的位置。
这一步骤的关键是对图像数据进行准确的分析和处理,以获取精确的位置信息。
基于可见光的室内定位技术具有许多优势。
首先,可见光在室内环境中广泛存在,因此无需增加额外的硬件设备,降低了成本。
同时,由于可见光信号的波长较短,其穿透能力相对较差,可以有效减少信号的干扰,从而提高定位的准确性。
其次,基于可见光的室内定位技术具有较高的精度,可以达到亚米级的定位准确度,满足各种室内定位应用的需求。
然而,基于可见光的室内定位技术也存在一些挑战和问题。
首先,光信号在室内环境中会受到障碍物的阻挡和反射,导致信号强度的变化,从而影响定位的准确性。
其次,光信号在室内环境中的传播受到多径效应、多光束效应等因素的影响,使得信号的传输路径复杂化,进一步增加了定位的难度。
三球定位名词解释
三球定位名词解释
卫星发射测距信号和导航电文,导航电文中含有卫星的位置信息。
用户接收机在某一时刻同时接收三颗以上卫星信号,测量出测站点(用户接收机)至三颗卫星的距离,解算出卫星的空间坐标,再利用距离交会法(从两个已知点测量至某一待测点的距离,然后根据这两段距离的交点确定该待测点,这种方法称为距离交会法。
)就可以解算出测站点的位置。
整个过程就是三球交会定位原理在卫星导航领域中的体现。
目前,国际上四大卫星导航系统GPS、GLONASS、Galileo和北斗卫星导航系统的定位原理都是相同的,均是采用三球交会的几何原理来实现定位,具体流程如下:
(1)用户测量出自身到三颗卫星的距离;
(2)卫星的位置精确已知,通过电文播发给用户;
(3)以卫星为球心,距离为半径画球面;
(4)三个球面相交得两个点,根据地理常识排除一个不合理点即得用户位置。
可见光定位原理
可见光定位原理可见光是电磁波谱中人眼可以感知的部分,即可见光谱。
这个范围中电磁辐射被称为可见光,或简单地称为光。
人眼可以感受到的波长范围通常落在390到780纳米(nm)之间,但有一些人能够感知到波长大约在380到780纳米之间的电磁波。
正常视力的人眼对波长约为555纳米的电磁波最为敏感,这种电磁波处于光学频谱的绿光区域。
可见光透过三棱镜可以呈现出红、橙、黄、绿、青、蓝、紫七种颜色组成的光谱。
红色光波最长,紫光波最短。
红640—780nm,橙640—610nm,黄610—530nm,绿505—525nm,蓝505—470nm,紫470—380nm。
此外,可见光还有一些重要的物理特性,包括光的传播(可见光是一种电磁波,能够在真空中传播,传播速度约为光速的299,792,458米每秒)、光的干涉(光线相遇时会发生干涉现象,产生互相增强或相互抵消的干涉条纹)、光的衍射(光线通过狭缝或物体边缘时会发生衍射现象,产生环形或直线条纹)以及光的吸收和发射(物质可以吸收和发射可见光,这是许多现象的基础,如色素的吸收和荧光的发射)等。
在大气层中,可见光的传播会受到一定影响,但大气层对于可见光波段是相对透明的,这使得我们能够在日常生活中看到各种颜色和物体。
而其他生物,如蜜蜂,能够看到不同于人类的电磁波谱范围,例如紫外线波段,这对于它们寻找花蜜等活动具有重要意义。
可见光定位技术的原理与红外光学定位技术类似,都是通过摄像头捕捉被追踪物体的位置信息。
然而,与红外光学定位技术不同的是,可见光定位技术不再利用红外光,而是直接利用可见光。
在具体应用中,可见光定位技术通常需要在被追踪物体上安装能发出不同颜色的发光灯。
摄像头捕捉到这些颜色光点后,可以区分不同的被追踪物体以及它们的位置信息。
例如,在一些系统中,不同的被追踪物体可能会发出不同颜色的光,这样摄像头就可以通过识别光的颜色来确定物体的身份和位置。
此外,还有一种可见光定位技术是通过对LED灯进行编码,将ID 调制在灯光上,灯会不断发射自己的ID。
可见光室内定位三个球相交
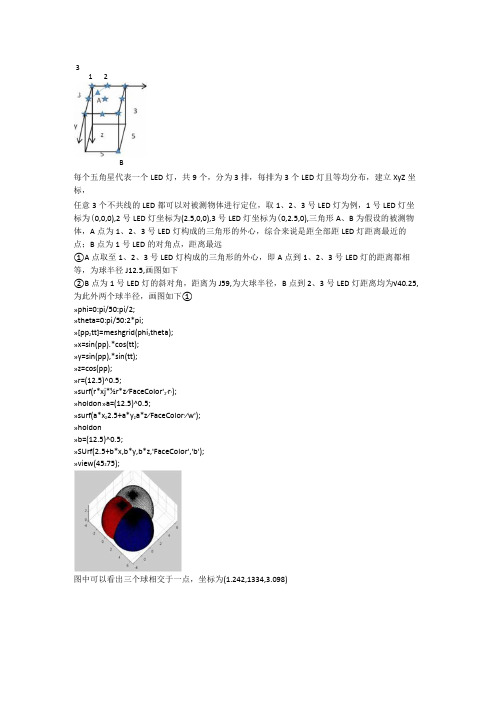
31 2B每个五角星代表一个LED灯,共9个,分为3排,每排为3个LED灯且等均分布,建立XyZ坐标,任意3个不共线的LED都可以对被测物体进行定位,取1、2、3号LED灯为例,1号LED灯坐标为(0,0,0),2号LED灯坐标为(2.5,0,0),3号LED灯坐标为(0,2.5,0),三角形A、B为假设的被测物体,A点为1、2、3号LED灯构成的三角形的外心,综合来说是距全部距LED灯距离最近的点;B点为1号LED的对角点,距离最远①A点取至1、2、3号LED灯构成的三角形的外心,即A点到1、2、3号LED灯的距离都相等,为球半径J12.5,画图如下②B点为1号LED灯的斜对角,距离为J59,为大球半径,B点到2、3号LED灯距离均为√40.25,为此外两个球半径,画图如下①»phi=0:pi/50:pi/2;»theta=0:pi/50:2*pi;»[pp z tt]=meshgrid(phi z theta);»x=sin(pp).*cos(tt);»y=sin(pp),*sin(tt);»z=cos(pp);»r=(12.5)^0.5;»surf(r*xj*½r*z∕FaceColor'z,r,);»holdon»a=(12.5)^0.5;»surf(a*x z2.5+a*y z a*z∕FaceColor,∕w');»holdon»b=(12.5)^0.5;»SUrf(2.5+b*x,b*y,b*z,'FaceCoIor','b');»view(45z75);图中可以看出三个球相交于一点,坐标为(1.242,1334,3.098)view(20,-50);②»phi=0:pi/50:pi/2;»theta=0:pi/50:2*pi;»[ppΛt]=meshgrid(phi,theta);»x=sin(pp).*cos(tt);»y=sin(pp).*sin(tt);»z=cos(pp);»r=(59)^0.5;»surf(r*x z r*½r*z∕FaceColor√r,);»holdon»a=(40.25)^0.5;»surf(a*×,2.5+a*y,a*z∕FaceColor,∕w');»holdon»b=(40.25)^0.5;»SUrf(2.5+b*x,b*y,b*z,'FaceCoIor','b'); »view(90,75);图中可以看出三个球相交于一点,坐标为(4.995,4.963,3.051) view(20,-120)。
三球交会定位原理
三球交会定位原理
三球交会定位原理是一种基础测量技术,可以通过三个已知的点定位一个未知的点。
这项技术被广泛应用于地质勘探、海洋测量、车辆定位、航空航天等领域。
这种原理的基本假设是存在一个点,它与三个已知点的距离分别已知,通过测量这些距离可以确定这个未知点的位置。
下面是三球交会定位原理的详细步骤:
1. 安装三个球体
首先需要在已知的三个点处安装三个球体,并用仪器准确地测量它们的坐标位置和半径。
球体可以是物理球体,也可以是虚拟球体,例如通过卫星信号模拟的球体。
2. 测量与球体的距离
接着需要测量未知点与三个球体的距离,可以使用激光测距、超声波测距等技术。
这个过程需要对测量仪器进行精确校准,并考虑到环境因素对测量的干扰。
3. 确定三个球体的交点
通过测量与三个球体的距离,可以得到三个球体的圆心到未知点的距离。
将这三个球体的圆心连成一条直线,确定它们的交点。
这个交点就是最终需要定位的未知点。
4. 确定未知点的坐标
最后需要确定未知点的坐标。
通过已知的三个球体的坐标以及它们的交点,可以使用三角形相似等几何原理计算出未知点的坐标。
此时需要考虑数据误差以及计算方法的精度,可以使用差分解法等技术提高计算的精度。
总体来讲,三球交会定位原理是一种简单、有效的定位技术。
然而,在实际应用中也需要考虑很多因素,例如障碍物的影响、测量误差的影响等等,在这些方面需要不断优化和改进技术,才能更好地应用在各个领域中。
三球定位原理 PPT
将非线性方程线性化
G f (x, y, x) dG f dx f dy f dz
x y z
将非线性方程线性化
G
x xi
x x xi 2 y yi 2 z zi 2
G
y yi
x x xi 2 y yi 2 z zi 2
4.判断符合估计精度
5.如不符d合V,2 对dx用u2户 d坐yu标2 坐dz修u2 正:
xu xu dxu , yu yu dyu , zu zu dzu
并返回第2步
用户坐标的解算
1.首先假设用户坐标:
(xu , yu , zu )
用户坐标的解算
1.首先假设用户坐标: (xu , yu , zu ) 2.通过3颗GPS卫星的坐标:(xi , yi , zi ) 计算 A 矩阵
3.坐标估计误差:(dxu , dyu , dzu )
4.判断符合估计精度
dV 2 dxu2 dyu2 dzu2
5.如不符合,对用户坐标坐修正:
xu xu dxu , yu yu dyu , zu zu dzu
并返回第2步
用户坐标的解算
2.通过3颗GPS卫星的坐标,(xi , yi , zi )
d
1
1
(x1 xu )2 ( y1 yu )2 (z1 zu )2
d
2
2
( x2
xu )2
( y2
yu )2
(z2
zu )2
d 3 3 (x3 xu )2 ( y3 yu )2 (z3 zu )2
室内可见光定位装置

2017全国大学生电子设计竞赛设计报告可见光室内定位装置(I题)菏泽学院蒋震机电工程学院编号:队员:二〇一七年八月十日摘要本系统由 STC89C52RC最小系统板为核心,光敏传感器根据光照强度分别检测XY轴坐标,PCF8591A/D转换器将传感器检测的光照转化为数字量,通过电路传递到 LCD1602液晶显示屏,在LCD1602液晶显示屏显示XY轴及五个区域。
按键按下将当前的数字量记录下来并设为基准值,根据新检测的数字量相对基准值判断Y轴坐标,从而实现校正原点。
顶部平面采用三个开关,一个47Ω的电阻和一个二极管组成控制电路,控制三个大功率发光二极管。
由此完成定位。
关键词: STC89C52RC最小系统板光敏传感器 PCF8591A/D转换器LCD1602液晶显示屏Abstract:This system by STC89C52RC minimum system board as the core, the photosensitive sensor based on light intensity detection XY coordinates, respectively PCF8591A a/D converter sensor detection of light can be converted to digital quantity, through the circuit to the LCD1602 LCD screen, the LCD1602 LCD display shows the XY axis and five areas.Press the button to record the current digital quantity and set it as the base value, and determine the Y-axis coordinate according to the new test digital relative reference value, so as to realize the correct origin.At the top of the plane using three switch, a 47 Ω resistance and a diode control circuit, control three power leds.This completes the positioning.目录1设计任务与要求 (4)1.1设计任务 (4)2设计要求 (4)2.1基本要求 (4)2.2发挥部分 (5)3系统方案 (5)3.1电源的论证与选择 (6)3.2光敏传感器模块的论证与选择 (6)3.3控制系统的论证与选择 (6)3.4显示模块的论证与选择 (7)4方案描述 (8)4.1光源及探测器特性 (8)4.2驱动电路 (9)4.3数据编码 (10)4.4数据解码 (11)4.5识别映射 (12)5设计分析与计算 (12)5.1检测XY轴坐标 (12)5.2A/D转换模块 (13)5.3键盘输入 (13)5.4电源模块 (13)5.5电路原理框图 (13)5.6结构尺寸图 (14)6测试方案与测试结果 (14)6.1测试方案 (14)6.1.1硬件测试 (14)6.1.2软件仿真测试 (14)6.1.3硬件软件联调 (14)6.2零件原理图汇总 (15)6.3测试条件与仪器 (15)7软件设计 (15)7.1主程序流程图 (15)8程序清单(见附件一) (16)9测试方案与测试结果 (16)9.1测试方案 (16)9.1.1硬件测试 (16)9.1.2软件仿真测试 (16)9.1.3硬件软件联调 (16)9.2测试条件与仪器 (16)9.3测试结果及分析 (16)10结论和总结 (17)10.1对设计的小结 (17)10.2设计收获体会 (17)10.3对设计进一步完善的建议 (17)1设计任务与要求1.1设计任务设计并制作可见光室内定位装置,其构成示意图如图 1 所示。
三维空间定位及交互操作
• • • • 三维空间定位的基本原理 三维空间定位的主要算法 三维空间交互的主要过程 三维空间交互的常见硬件
三维空间定位的基本原理及算法
• 我们知道,三维空间,也称为三次元、3D,日常生活中 可指由长、宽、高三个维度所构成的空间。而虚拟现实就 是用电脑模拟产生一个三维空间的虚拟世界,提供使用者 关于视觉、听觉、触觉等感官的模拟,让使用者如同身历 其境一般,可以及时、没有限制地观察三度空间内的事物。 那么。怎样在虚拟的三维空间里面确定某个点的位置呢? 目前我所知道的算法有:三边测量法,基于TOA的算法, 基于TDOA的算法,基于AOA的算法等。
谢谢!
ቤተ መጻሕፍቲ ባይዱ
基于无线传感器的三维空间定位
• 该方法主要是采用基于 RSSI (接收信号强度)的测距技 术,结合参考节点的坐标,从平面定位推广至三维立体空 间定位,通过 CC2431 无线传感器网络平台,在 Zig Bee 2006 协议的基础上,实现了三维立体空间的定位。 • 具体方法为:先选取3个参考节点以及一个未知的定位节 点,这4个节点组成一个立体的三维空间定位系统,已知3 个参考节点的坐标以及他们到未知的定位节点之间的距离 即可根据公式求出未知节点的坐标,从而完成定位。该方 法也称三边测量法。
• 若已知节点的坐标为 (X1,Y1),(X2,Y2), (X3,Y3),距离为 d1,d2,d3,利用右边的 公式即可求出未知点 的坐标(X,Y)
CHAN定位算法
• 该算法的主要思想是两次使用加权最小二乘法(WLS)得到初始解,利用初始解 将非线性定位方程组线性化,最终得到位置估计。该定位算法是以移动台作为 圆心,移动台(MS)到基站(BS)的距离作为半径得到一个圆,三圆相交即可确定 MS的位置。Chan算法是一种基于TDOA技术、具有解析表达式解的定位算法, 在TDOA误差服从理想高斯分布时性能良好。当基站数为3时,该算法表现一 般。一般该算法的推导过程都是基于TDOA误差较小且为零均值高斯随机变 量这个前提,对于实际信道环境中误差较大的TDOA测量值,该算法的性能 将会显著下降。当基站能测到比较精确的AOA值时,利用TDOA/AOA混合定 位能进一步提高定位精度。 在众多基于TDOA 的定位算法中,Chan氏算法得到了广泛的应用。这主要是 因为该算法具备三大优势:①算法不需要初值;②仅进行两次迭代就可求得 最终结果;③算法的定位精度在视距环境下能够达到克拉美罗下限。可见, Chan氏定位算法是一种相当实用的方法,适合实际工程。 该算法的特点是计算量小,在噪声服从高斯分布的环境下,定位精度高。但 在非视距(NLOS)环境下,chan氏算法的定位精度下降。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
每个五角星代表一个LED灯,共9个,分为3排,每排为3个LED灯且等均分布,建立xyz 坐标,
任意3个不共线的LED都可以对被测物体进行定位,取1、2、3号LED灯为例,1号LED灯坐标为(0,0,0),2号LED灯坐标为(2.5,0,0),3号LED灯坐标为(0,2.5,0),
三角形A、B为假设的被测物体,A点为1、2、3号LED灯构成的三角形的外心,综合来说是距所有距LED灯距离最近的点;B点为1号LED的对角点,距离最远
①A点取至1、2、3号LED灯构成的三角形的外心,即A点到1、2、3号LED灯的距离都相等,为球半径√12.5,画图如下
②B点为1号LED灯的斜对角,距离为√59,为大球半径,B点到2、3号LED灯距离均为√40.25,为另外两个球半径,画图如下
①
>>phi=0:pi/50:pi/2;
>>theta=0:pi/50:2*pi;
>> [pp,tt]=meshgrid(phi,theta);
>> x=sin(pp).*cos(tt);
>> y=sin(pp).*sin(tt);
>> z=cos(pp);
>> r=(12.5)^0.5;
>>surf(r*x,r*y,r*z,'FaceColor','r');
>> hold on
>> a=(12.5)^0.5;
>>surf(a*x,2.5+a*y,a*z,'FaceColor','w');
>> hold on
>> b=(12.5)^0.5;
>>surf(2.5+b*x,b*y,b*z,'FaceColor','b');
>>view(45,75);
图中可以看出三个球相交于一点,坐标为(1.242,1.334,3.098)
view(20,-50);
②
>>phi=0:pi/50:pi/2;
>>theta=0:pi/50:2*pi;
>> [pp,tt]=meshgrid(phi,theta);
>> x=sin(pp).*cos(tt);
>> y=sin(pp).*sin(tt);
>>z=cos(pp);
>> r=(59)^0.5;
>>surf(r*x,r*y,r*z,'FaceColor','r');
>> hold on
>> a=(40.25)^0.5;
>>surf(a*x,2.5+a*y,a*z,'FaceColor','w'); >> hold on
>> b=(40.25)^0.5;
>>surf(2.5+b*x,b*y,b*z,'FaceColor','b'); >>view(90,75);
图中可以看出三个球相交于一点,坐标为(4.995,4.963,3.051)
view(20,-120)。