室内可见光定位装置
八种无线室内定位方案对比
八种无线室内定位方案对比无线室内定位是指通过无线通信技术实现对移动设备或人员在室内位置的准确定位。
随着无线通信技术的不断发展和智能设备的普及,室内定位已经成为了一个重要的研究领域。
本文将对八种常见的无线室内定位方案进行对比,分别是Wi-Fi定位、蓝牙定位、红外定位、超宽带定位、ZigBee定位、可见光通信定位、声波定位和射频识别定位。
首先是Wi-Fi定位。
Wi-Fi定位是利用Wi-Fi信号的强度和信号传播模型来进行定位。
优点是成本较低,覆盖范围广。
缺点是定位精度可能较低,受到信号干扰的影响较大。
其次是蓝牙定位。
蓝牙定位是通过蓝牙信号的强度和传输时间来进行定位。
优点是定位精度较高,适合实时定位应用。
缺点是成本较高,覆盖范围相对较小。
然后是红外定位。
红外定位是通过红外信号的强度和传播时间来进行定位。
优点是定位精度较高,适合小范围室内定位。
缺点是需要一定数量的红外发射器和接收器,成本较高。
接下来是超宽带定位。
超宽带定位是通过超宽带信号的传输延迟和多路径效应来进行定位。
优点是定位精度非常高,适合高精度定位应用。
缺点是成本较高,对硬件要求严格。
然后是ZigBee定位。
ZigBee定位是通过ZigBee信号的强度和传输时间来进行定位。
优点是能够实现低功耗和长距离通信。
缺点是定位精度可能较低,受到信号干扰的影响较大。
再者是可见光通信定位。
可见光通信定位是通过LED灯光的亮度和颜色变化来进行定位。
优点是能够与照明系统无缝集成,定位精度较高。
缺点是需要大量的LED灯和相应的传感器,成本较高。
然后是声波定位。
声波定位是通过声波信号的传播时间和多路径效应来进行定位。
优点是成本较低,适合小范围室内定位。
缺点是定位精度可能较低,受到环境噪声的影响较大。
综上所述,不同的无线室内定位方案具有不同的优点和适用范围。
选择合适的定位方案应根据具体的应用场景和需求来确定。
同时,不同的定位方案也可以结合使用,以提高定位精度和可靠性。
无线室内定位技术的发展还需要进一步研究和创新,以满足不断增长的需求。
基于可见光通信技术的室内定位设计与实践
基于可见光通信技术的室内定位设计与实践室内定位是指利用技术手段在室内环境中确定或追踪物体或人员的位置信息。
在日常生活和工作中,室内定位具有广泛的应用场景,如无线定位导航、智能家居系统、室内导航等。
而基于可见光通信技术的室内定位系统具有较高的精度和稳定性,被广泛应用于各个领域。
本文将探讨基于可见光通信技术的室内定位的设计与实践。
首先,我们需要了解可见光通信技术的原理。
可见光通信技术是利用可见光范围内的光波进行数据传输的一种通信方式。
它通过利用LED灯或荧光灯等光源产生的可见光进行信息传递。
在室内定位中,我们可以使用这种技术来实现定位系统。
基于可见光通信的室内定位系统通常由发送端和接收端组成。
发送端利用LED灯或其他光源发出光信号,接收端根据接收到的光信号进行距离测量,从而确定物体或人员的位置。
其次,室内定位系统的设计需要考虑多个因素。
首先是光源的布置。
光源应该均匀分布在室内空间中,避免盲区的产生,以获得更准确的定位结果。
其次是接收端的设计。
接收端通常由光传感器和计算设备组成。
光传感器用于接收光信号,并将其转化为电信号。
计算设备则根据接收到的光信号进行距离测量和定位计算。
此外,室内定位系统还需要考虑室内环境的干扰因素,如光线强度的变化、遮挡物、反射等,以减少误差。
在实践中,室内定位系统的设计和部署需要遵循以下步骤。
首先,进行室内场地的勘测和规划。
通过勘测室内环境,确定合适的光源位置和数量,并考虑遮挡物、光线强度等因素。
其次,选择合适的硬件设备。
根据场地的大小和需求,选择适合的LED灯或光源和光传感器。
然后,搭建室内定位系统的硬件平台。
根据设计需求,将光源和光传感器进行布置,并连接计算设备。
最后,进行系统的测试和调整。
通过收集和分析实时数据,调整系统参数,以提高定位的精度和稳定性。
基于可见光通信技术的室内定位系统具有多个优点。
首先,可见光通信技术不会对人体健康产生影响,相比其他技术如射频定位等更加安全。
可见光室内定位装置的算法设计与实现
s e n s o r ,s i g n a l s we r e c o l l e c t e d i n t h e t i r l t a e r a l p o s i t i o n i n g me t h o d a s he t f o u n d a t i o n ,t o j o i n he t Ha r r i s ,p r o j e c t i o n ma p p i n g ,p o i n t S O rc u e
i u d g me n t a l g o r i t h m a s he t i mp r o v e d a l g o r i t h m,r e a l i z e d he t h i g h p r e c i s i o n o f i n d o o r p o s i t i o n i n g .
Be c a u s e t h e s a t e l l i t e s i g n a l i S v e r y we a k o r e v e n u n a b l e t o o r p o s i t i o n i n g c a n n o t b e r e a l i z e d b y t r a d i t i o n a l t e c h n o l o g y i n d o o r s .
Th e s o f t wa r e d e s i g n a n d r e a l i z a t i o n o f v i s i bl e i n d o o r po s i t i o n i n g De v i c e
Li Yi n g Ya n Zhi ・ - we i Ca i Xi a o— - y u
室内可见光定位的原理
室内可见光定位的原理
室内可见光定位的基本原理如下:
1. 发射器布置
在室内天花板等高处布置多个可见光发射器,形成发射器阵列。
2. 编码发射
每个发射器发出编码唯一的可见光信号,一般为高频闪烁光。
3. 摄像头采集
目标对象头戴或携带照相机,对室内区域进行全方位拍摄。
4. 解码识别
通过图像处理算法,识别摄像头视野内可见光发射器的位置。
5. 距离解析
根据每个发射器的视线角度,解析出目标对象与发射器的方位和距离。
6. 三角计算
利用多个发射器与目标对象形成的距离构成三角网,求解目标的空间坐标。
7. 数据融合
结合惯性传感器等数据进行融合,校正定位坐标结果。
8. 跟踪定位
当目标在室内移动时,持续重复上述过程,实时测量目标的空间坐标。
9. 抗干扰设计
采用调制编码、滤波识别等技术,提高对室内复杂光线的抗干扰能力。
10.网络协同
多个目标同时定位时,需要进行网络协同,避免信号冲突。
综上所述,这种室内可见光定位方式,具有准确、稳定、低成本等优点,可广泛用于
各种室内导航和定位应用。
可见光通信应用场景

可见光通信应用场景一、引言可见光通信作为一种新一代的无线通信技术,利用可见光波段进行信息传输,具有高速、高安全性和低干扰等优势。
随着LED技术的快速发展,可见光通信在各个领域都有广泛的应用场景。
本文将探讨可见光通信的应用场景,分析其在家庭、办公、交通和医疗等方面的具体应用,展示可见光通信的无限潜力。
二、家庭应用场景1. 室内照明+通信可见光通信技术可以与LED照明相结合,实现室内照明和通信的双重功能。
通过在LED灯泡上安装光通信模块,人们可以在不影响正常照明的情况下,利用光来传输数据。
在家庭环境中,这种技术可以被应用于智能家居系统,实现家庭设备之间的互联互通。
2. 家庭娱乐可见光通信在家庭娱乐方面也具有巨大的潜力。
通过利用LED投影仪和LED屏幕,可以实现高清视频传输和大屏幕互动游戏。
同时,可见光通信还可以与智能手机和平板电脑等移动设备结合,实现家庭娱乐内容的分享和传输。
3. 室内定位利用可见光通信技术,可以实现室内定位的精确性和准确性。
通过在室内安装多个LED灯泡和接收器,可以通过接收光信号的强弱来确定移动设备的位置。
在家庭环境中,室内定位技术可以用于寻找遗失的物品、监控家庭成员的位置等。
三、办公应用场景1. 光纤通信替代可见光通信可以作为一种替代光纤通信的解决方案。
传统的光纤通信需要铺设光缆,引入复杂的设备和维护过程。
而可见光通信可以通过利用既有的LED照明设备进行数据传输,减少了设备和成本的投入。
2. 室内导航在办公场景中,可见光通信可以用于室内导航系统。
通过在办公室内的灯泡上安装光通信模块,可以向员工的手机发送导航信息,帮助员工快速找到目标位置。
这种技术可以提高办公效率,减少时间浪费。
3. 会议交流可见光通信可以用于会议室的信息交流。
通过在会议室内安装LED灯泡和接收器,可以将会议材料和演示内容以光信号的形式传输给与会人员的设备。
这种方式不仅可以提高会议效率,还可以减少对纸质材料的依赖。
可见光通信技术在室内定位中的应用
可见光通信技术在室内定位中的应用随着科技的发展,现代人们的生活方式发生了翻天覆地的变化,人们渐渐地从传统的辛勤劳作转向了更加自由和舒适的生活方式。
同时,随着激烈的市场竞争,以及用户对数据价值的不断提高,对于室内定位技术的需求也越发迫切。
在这个背景下,基于可见光通信技术的室内定位技术逐渐被人们所熟知和认可,成为了当今室内定位技术领域的研究热点。
本文探讨可见光通信技术在室内定位中的应用。
一、室内定位的现状与挑战在室外环境下,全球定位系统(GPS)已经成为了一种不可或缺的技术,但是在室内环境下,独立的GPS定位系统由于受到建筑物、人群干扰等因素的影响而难以取得满意效果。
虽然使用无线信号可以实现室内定位,但是现有的室内定位技术存在一些局限性。
例如,射频信号的穿透力较弱,容易被楼层、墙面、隔断等建筑障碍物所阻挡,从而导致数据传输量减少,定位精度不高。
此外,射频信号也易受到干扰,而且频段资源紧张,容易出现干扰现象。
二、可见光通信技术在室内定位中的优势相对于使用射频信号的定位技术,可见光通信技术(VLC)在室内定位中具有独特的优势。
可见光通信技术使用的是可见光范围内的LED发射器和接收器,具有更高的载频数量和带宽范围,从而可以提供更高的数据传输速率和更低的传输延迟。
此外,基于可见光通信技术的室内定位系统能够对电力、市政、工业式建筑等领域进行精细区域管理,保证室内环境的安全稳定,实现对于空间的精细把控。
三、可见光通信技术在室内定位中的实现使用可见光通信技术进行室内定位需要在室内安装相应的LED灯和接收器,LED灯充当了信号发射器的角色,而接收器可以是智能手机、智能手表等设备。
在基于可见光通信技术的室内定位系统中,LED灯发射出一些特定的信号,接收器捕捉这些信号,系统接着将这些信息与已有的地图和数据进行匹配,并根据设备反馈信号计算出设备所处的位置,从而实现室内定位。
相比于其他的定位方式,基于可见光通信的室内定位具有诸多优势。
室内gps的原理与应用

室内GPS的原理与应用1. 引言室内GPS(Indoor GPS)是一种基于无线定位技术的系统,能够准确地确定在室内环境中的位置。
相比于传统的GPS系统,室内GPS能够解决在建筑物内部定位的难题。
本文将介绍室内GPS的原理和应用。
2. 室内GPS的原理室内GPS主要借助以下技术来实现定位功能:•无线通信技术:室内GPS利用无线通信技术,如Wi-Fi、蓝牙、红外线等,通过接收和分析信号来确定位置。
这些信号在室内环境中传播,与GPS 卫星信号传播的方式不同。
•信号强度测量:室内GPS通过测量无线信号的强度来确定位置。
当设备接收到多个无线信号源时,可以通过比较信号强度来确定设备所在的位置。
•三角定位技术:室内GPS还可以借助三角定位技术来确定位置。
该技术利用接收无线信号的多个设备之间的相对位置关系,通过计算角度和距离来确定位置。
3. 室内GPS的应用室内GPS在以下方面具有广泛的应用:•室内导航:室内GPS可以提供准确的室内导航功能。
用户可以在大型建筑物内使用室内GPS来确定自己的位置,并根据导航指引找到目标位置,如商场内的特定店铺、医院的特定科室等。
•资源管理:室内GPS可以用于室内资源管理。
例如,大型办公楼内可以安装室内GPS系统来跟踪设备的位置,管理人员可以通过系统查看设备的实时位置,提高资源的利用率。
•安全监控:室内GPS还可以用于安全监控。
例如,在大型工厂或仓库中,可以通过室内GPS系统来监控人员和物品的位置,及时发现异常情况。
•定位服务:室内GPS可以提供定位服务,为用户提供个性化的服务。
例如,在购物中心内,商家可以根据用户的位置向他们发送特定的优惠信息。
4. 室内GPS的优缺点室内GPS相比于传统的GPS系统具有以下优点:•定位精度高:室内GPS能够提供高精度的定位,通常在几米范围内。
•可用性强:室内GPS可以在各种室内环境中使用,而传统的GPS系统在室内环境中的定位精度较低。
•易于部署:室内GPS系统相对于传统的GPS系统来说,更易于部署和维护。
基于光信号的室内定位装置设计
qiyekejiyufazhan0引言由于信号的衰减,卫星定位在室内比较困难。
随着辅助卫星定位的出现,在北美某些木质的房屋或在国内比较浅度的室内如靠近窗的地方,通过辅助卫星定位也可以定位。
但是,深度室内定位目前仍没有办法通过辅助卫星定位来解决。
同时也出现了根据室内地磁场的分布来做室内定位的技术,类似于指纹采集来搜集室内的地磁信息从而提供室内位置。
通过比较各种室内定位技术,从市场的反馈、技术的领先性和应用前景方面来看,基于可见光通信的室内定位技术是一个比较有前景的技术。
光源是室内一个必要的基础设施,它最大的优势在于不需要我们进行额外的部署。
此外,光源进行部署以后进行变动的可能性比较小,每个位置都可以精确地量化,从而保证定位结果的精确性。
高通可见光定位技术精度可以达到厘米量级,和目前其他主流技术的定位精度有质的区别,有可能产生新的应用场景。
1系统方案论证与比较1.1传感器的比较与选择方案一:通过摄像头作为对天花板的可见光阵列连续不断地拍照,根据每个灯光的不同位置来确定实时坐标。
但该方法对于摄像头的精度要求较高且需要较高的图像处理技术。
方案二:LED 可见光定位技术主要是将室内不同位置的3个LED 的光照强度分别储存在数据库中,将接收端感受到的光照强度与数据库的内容相比较来确定位置坐标。
1.2测距方法的比较与选择方案一:AOA 技术需要设置方向性阵列,获取发射端的发射信号角度信息,再利用交汇法来获得坐标。
要求高空间分辨率,对于室内系统来说难以实现。
方案二:在室内,收、发端距离较小,信号传输时间较短,对于同步传输的时钟精度要求很高。
方案三:RSS 技术仅使用3个LED 作为信号源发射不同频率的载波信号,接收端根据接收到的信号强度,计算距离,并与数据库内的数据做比较,得出坐标值。
综合考虑以上方案,选用方案三并且使用频分复用技术:让3个LED 的发光频率分别位于3个频段,并且每个频段的中心频率相隔较远,保证光信号之间的相互独立,以此来区分不同的LED 。
激光雷达在室内定位中的应用
激光雷达在室内定位中的应用随着科技的不断进步,激光雷达的应用越来越广泛,其中之一就是在室内定位领域。
激光雷达通过测量光的时间和距离,能够精确地定位物体的位置,因此在室内定位中有很大的应用潜力。
一、激光雷达的原理和优势激光雷达是一种通过测量光的时间和距离来定位物体位置的设备。
它发射一束激光,当激光照射到物体表面时,激光会反射回来。
利用激光的时间和距离,可以计算出物体的位置和距离信息。
激光雷达相比其他定位技术有许多优势。
首先,它可以实现高精度的定位,这对于许多应用场景非常重要。
其次,它在复杂的室内环境中也能够正常工作,并且不受电磁干扰的影响。
最后,它还具有快速响应的特点,可以实时地对物体进行定位。
二、1. 室内导航室内导航是指在复杂的室内环境中为人们提供导航的服务。
激光雷达在室内导航中可以用来精确地定位人们的位置,并且在不同的室内场景中自适应调整。
这有助于人们更加轻松地找到自己的位置,并且顺利地到达目的地。
2. 机器人自主导航机器人自主导航是指机器人能够在室内环境中自主地行动,完成各种任务。
在机器人自主导航中,激光雷达也扮演着重要的角色。
机器人需要用激光雷达来定位自己的位置,并且在行驶过程中进行避障,确保安全性。
3. 室内定位商业应用激光雷达在室内定位商业应用中也有广泛的应用。
例如,它可以用来定位购物者的位置,从而为他们提供个性化的推荐服务。
同时,它也可以用于精确追踪物品的位置,例如在仓库管理等场景中。
三、激光雷达在室内定位中面临的挑战和解决方案虽然激光雷达在室内定位中有着广泛的应用前景,但是它也面临着一些挑战。
首先,由于室内环境的复杂性,激光雷达可能会受到物体的反射、遮挡等影响,导致测量结果不准确。
其次,激光雷达需要在不同的室内场景中适应自己的工作模式,这也是一个挑战。
针对这些挑战,目前已经提出了一些解决方案。
例如,利用多个激光雷达进行多传感器融合,从而提高定位精度;利用机器学习等技术对数据进行处理,从而减少误差。
可见光定位原理
可见光定位原理
可见光定位是一种利用可见光传感器进行定位的技术。
其原理是通过测量目标物体或地点处的光信号,来确定其位置。
在可见光定位中,我们使用的是可见光传感器来探测光信号。
这些传感器通常包括光敏元件和信号处理电路。
当光线照射到光敏元件上时,它会产生电流或电压信号,这些信号随后被信号处理电路处理和分析。
在定位过程中,我们需要放置多个传感器来同时接收光信号。
通过对这些信号进行比较、分析以及三角测量,我们可以确定目标物体或地点的位置。
这是因为当光信号从发光源传播到不同的传感器时,会经历不同的路径和时间延迟,这些信息可以用来计算位置。
可见光定位的应用非常广泛。
例如,在室内导航系统中,可见光定位可以帮助人们快速准确地找到目标位置。
在无人驾驶车辆中,可见光定位可以用来检测周围的道路和障碍物,以实现自动导航。
此外,可见光定位还可以应用于机器人导航、智能家居系统等领域。
总的来说,可见光定位利用可见光传感器测量光信号,通过分析不同传感器接收到的光信号来确定目标物体或地点的位置。
通过其广泛的应用,可见光定位为我们提供了一种精确、可靠的定位方法。
可见光室内定位三个球相交
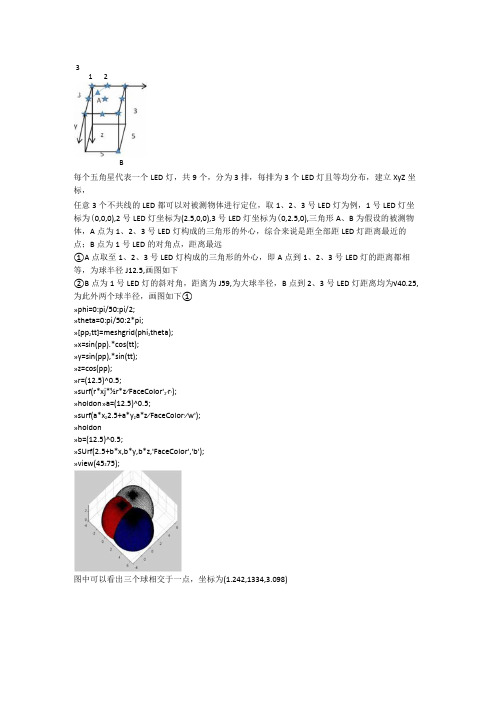
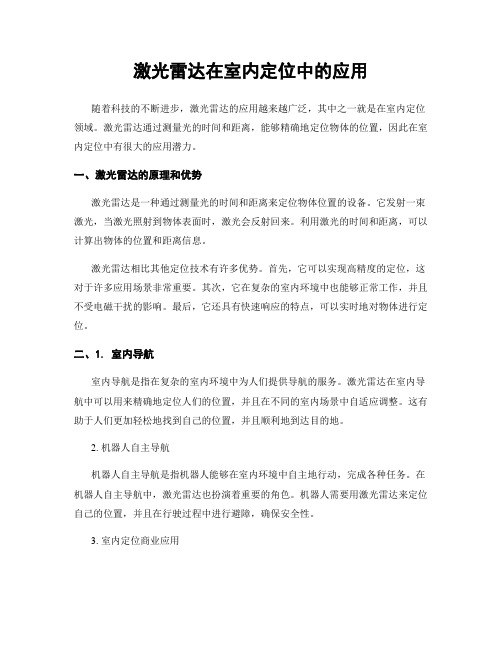
31 2B每个五角星代表一个LED灯,共9个,分为3排,每排为3个LED灯且等均分布,建立XyZ坐标,任意3个不共线的LED都可以对被测物体进行定位,取1、2、3号LED灯为例,1号LED灯坐标为(0,0,0),2号LED灯坐标为(2.5,0,0),3号LED灯坐标为(0,2.5,0),三角形A、B为假设的被测物体,A点为1、2、3号LED灯构成的三角形的外心,综合来说是距全部距LED灯距离最近的点;B点为1号LED的对角点,距离最远①A点取至1、2、3号LED灯构成的三角形的外心,即A点到1、2、3号LED灯的距离都相等,为球半径J12.5,画图如下②B点为1号LED灯的斜对角,距离为J59,为大球半径,B点到2、3号LED灯距离均为√40.25,为此外两个球半径,画图如下①»phi=0:pi/50:pi/2;»theta=0:pi/50:2*pi;»[pp z tt]=meshgrid(phi z theta);»x=sin(pp).*cos(tt);»y=sin(pp),*sin(tt);»z=cos(pp);»r=(12.5)^0.5;»surf(r*xj*½r*z∕FaceColor'z,r,);»holdon»a=(12.5)^0.5;»surf(a*x z2.5+a*y z a*z∕FaceColor,∕w');»holdon»b=(12.5)^0.5;»SUrf(2.5+b*x,b*y,b*z,'FaceCoIor','b');»view(45z75);图中可以看出三个球相交于一点,坐标为(1.242,1334,3.098)view(20,-50);②»phi=0:pi/50:pi/2;»theta=0:pi/50:2*pi;»[ppΛt]=meshgrid(phi,theta);»x=sin(pp).*cos(tt);»y=sin(pp).*sin(tt);»z=cos(pp);»r=(59)^0.5;»surf(r*x z r*½r*z∕FaceColor√r,);»holdon»a=(40.25)^0.5;»surf(a*×,2.5+a*y,a*z∕FaceColor,∕w');»holdon»b=(40.25)^0.5;»SUrf(2.5+b*x,b*y,b*z,'FaceCoIor','b'); »view(90,75);图中可以看出三个球相交于一点,坐标为(4.995,4.963,3.051) view(20,-120)。
基于STC154K单片机的可见光室内定位装置
基于STC154K单片机的可见光室内定位装置
王江明;杨旭辉;韩根亮
【期刊名称】《天津市经理学院学报》
【年(卷),期】2018(000)006
【摘要】对室外定位常采用GPS来实现,但是对于室内位置由于信号比较弱而无法准确定位.为了准确确定室内位置,采用可见光室内定位,将光照和位置相联系.相比传统的室内无线定位装置,可见光室内定位装置有更多的优势和应用价值.通过16位的数字型环境强度传感器BH1750FVI对经PWM调制过的光信号进行采集,应用154单片机将光信号自动转化成位置信号,精度在3cm以内,达到了预期的效果.【总页数】4页(P59-62)
【作者】王江明;杨旭辉;韩根亮
【作者单位】平凉信息工程学校,甘肃平凉 744000;甘肃省科学院传感技术研究所, 兰州 730000;甘肃省科学院传感技术研究所, 兰州 730000;甘肃省科学院传感技术研究所, 兰州 730000
【正文语种】中文
【中图分类】TN29
【相关文献】
1.基于单片机设计的可见光室内定位通信装置 [J], 徐勇
2.基于STC15F104E单片机的室内定位装置设计 [J], 程瑞龙
3.一种基于LED灯的可见光室内定位装置 [J], 张金辉;楼然苗
4.基于STC154K单片机的可见光室内定位装置 [J], 王江明;杨旭辉;韩根亮;;;;
5.基于可见光室内定位装置机器人的研究 [J], 葛澄;黄倩;刚千妹;王昊天
因版权原因,仅展示原文概要,查看原文内容请购买。
使用激光投影仪进行室内定位和导航的方法

使用激光投影仪进行室内定位和导航的方法激光投影仪是一种非常先进的技术工具,它能够通过将激光束投射到目标表面上来进行室内定位和导航。
这种方法的原理是利用激光束在空间中的反射和反射时间的测量,来确定一个物体相对于其他物体的位置和方向。
在本文中,我们将探讨使用激光投影仪进行室内定位和导航的方法和应用。
一、激光投影仪的工作原理激光投影仪是通过发射激光束,并测量激光束在目标物体上的反射时间来实现室内定位和导航的。
它使用了光电传感器来测量光的传播时间,并根据光的速度和传播时间来计算物体的距离。
当激光束投射到目标物体上时,它会被反射回来,并被激光投影仪的接收器接收。
通过测量激光束传播的时间差,可以计算出物体与激光投影仪之间的距离。
二、激光投影仪在室内定位中的应用激光投影仪在室内定位中有着广泛的应用,尤其在大型商场、医院和机场等复杂的室内环境中。
通过在建筑物的墙壁、地板和天花板上安装激光投影仪,可以实时跟踪人员或物体的位置,并通过系统的算法来计算最短路径和最优路线。
这对于人们在陌生的室内环境中进行导航和定位非常有帮助。
三、激光投影仪在室内导航中的应用除了室内定位外,激光投影仪也可以用于室内导航。
例如,在大型商场或医院,人们经常会迷失在错综复杂的走廊中,难以找到正确的出口或特定的目的地。
利用激光投影仪,可以投射出路径指示器,指示人们朝着正确的方向前进。
这种激光投影仪的应用不仅可以提供实时导航信息,还能够提高用户体验并减少迷失的情况。
四、激光投影仪在医疗领域的应用案例在医疗领域中,激光投影仪也有着广泛的应用。
例如,在手术中,医生需要精确地定位和定向手术刀具,以确保手术的准确性和安全性。
激光投影仪可以投射出精确的参考线,帮助医生确定手术切口的位置和角度。
此外,在康复治疗中,激光投影仪也可以投射出运动轨迹和引导线,帮助患者进行正确的运动指导和康复训练。
总结:激光投影仪是一种强大的工具,它在室内定位和导航中的应用广泛而重要。
多层ELM分区域可见光室内定位算法

中图分类号:TN929.1 ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标志码:A
Indoor Positioning Algorithm of Subregional
Visible Light Based Multilayer ELM
多层ELM分区域可见光室内定位算法
作者:徐岩王昕昕
来源:《湖南大学学报·自然科学版》2019年第10期
摘;要:在漫反射光信道中,可見光室内定位受一阶反射、噪声信号等的影响,边界区域的定位误差相比内部区域较大,针对此问题,提出一种基于多层极限学习机的分区域定位算法,并通过仿真实验验证了算法的有效性.首先,对整体的实验区域建立第1层极限学习机神经网络,计算出整体的定位误差.其次,根据定位误差的大小和分布特征建立第2层极限学习机神经网络,将整体实验区域划分为边界区域和内部区域.对提取出的边界区域建立第3层极限学习机神经网络,计算出边界区域的定位误差.最后将边界区域的定位误差更新到整体的定位误差中,以实现定位.实验结果表明,该算法的整体平均定位误差为2.79 cm.与接收信号强度算法和反向传播神经网络相比,该算法的平均定位误差分别降低了13倍和55.36%.与单层极限学习机算法相比,边界区域的平均定位误差降低了65.66%,整体的平均定位误差降低了23.77%.该算法边界区域的定位误差明显降低,具有更高的定位精度和鲁棒性能,可适用于不同的定位场景.
Key words:indoor positioning systems;visible light communication;extreme learning machine;divided region;received signal strength
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
室内可见光定位装置2017全国大学生电子设计竞赛设计报告可见光室内定位装置(I题)菏泽学院蒋震机电工程学院编号:队员:二〇一七年八月十日摘要本系统由 STC89C52RC最小系统板为核心,光敏传感器根据光照强度分别检测XY轴坐标,PCF8591A/D转换器将传感器检测的光照转化为数字量,通过电路传递到 LCD1602液晶显示屏,在LCD1602液晶显示屏显示XY轴及五个区域。
按键按下将当前的数字量记录下来并设为基准值,根据新检测的数字量相对基准值判断Y轴坐标,从而实现校正原点。
顶部平面采用三个开关,一个47Ω的电阻和一个二极管组成控制电路,控制三个大功率发光二极管。
由此完成定位。
关键词: STC89C52RC最小系统板光敏传感器 PCF8591A/D转换器LCD1602液晶显示屏Abstract:This system by STC89C52RC minimum system board as the core, the photosensitive sensor based on light intensity detection XY coordinates, respectively PCF8591A a/D converter sensor detection of light can be converted to digital quantity, through the circuit to the LCD1602 LCD screen, the LCD1602 LCD display shows the XY axis and five areas.Press the button to record the current digital quantity and set it as the base value, and determine the Y-axis coordinate according to the new test digital relative reference value, so as to realize the correct origin.At the top of the plane using three switch, a 47 Ω resistance and a diode control circuit, control three power leds.This completes the positioning.目录1设计任务与要求 (4)1.1设计任务 (4)2设计要求 (4)2.1基本要求 (4)2.2发挥部分 (5)3系统方案 (5)3.1电源的论证与选择 (6)3.2光敏传感器模块的论证与选择 (6)3.3控制系统的论证与选择 (6)3.4显示模块的论证与选择 (7)4方案描述 (8)4.1光源及探测器特性 (8)4.2驱动电路 (9)4.3数据编码 (10)4.4数据解码 (11)4.5识别映射 (12)5设计分析与计算 (12)5.1检测XY轴坐标 (12)5.2A/D转换模块 (13)5.3键盘输入 (13)5.4电源模块 (13)5.5电路原理框图 (13)5.6结构尺寸图 (14)6测试方案与测试结果 (14)6.1测试方案 (14)6.1.1硬件测试 (14)6.1.2软件仿真测试 (14)6.1.3硬件软件联调 (14)6.2零件原理图汇总 (15)6.3测试条件与仪器 (15)7软件设计 (15)7.1主程序流程图 (15)8程序清单(见附件一) (16)9测试方案与测试结果 (16)9.1测试方案 (16)9.1.1硬件测试 (16)9.1.2软件仿真测试 (16)9.1.3硬件软件联调 (16)9.2测试条件与仪器 (16)9.3测试结果及分析 (16)10结论和总结 (17)10.1对设计的小结 (17)10.2设计收获体会 (17)10.3对设计进一步完善的建议 (17)1设计任务与要求1.1设计任务设计并制作可见光室内定位装置,其构成示意图如图 1 所示。
参赛者自行搭建不小于 80cm×80cm×80cm 的立方空间(包含顶部、底部和 3 个侧面)。
顶部平面放置 3 个白光 LED,其位置和角度自行设置,由 LED 控制电路进行控制和驱动;底部平面绘制纵横坐标线(间隔 5cm),并分为 A、B、C、D、E 五个区域,如图 2 所示。
要求在 3 个 LED 正常照明(无明显闪烁)的情况下,测量电路根据传感器检测的信号判定传感器的位置。
2设计要求2.1基本要求(1)传感器位于 B、D 区域,测量电路能正确区分其位于横坐标轴的上、下区域。
(2)传感器位于 C、E 区域,测量电路能正确区分其位于纵坐标轴的左、右区域。
(3)传感器位于 A 区域,测量显示其位置坐标值,绝对误差不大于 10cm。
(4)传感器位于 B、C、D、E 区域,测量显示其位置坐标值,绝对误差不大于 10cm。
(5)测量电路 LCD 显示坐标值,显示分辨率为 0.1cm。
2.2发挥部分(1)传感器位于底部平面任意区域,测量显示其位置坐标值,绝对误差不大于 3cm。
(2)LED 控制电路可由键盘输入阿拉伯数字,在正常照明和定位(误差满足基本要求(3)或(4))的情况下,测量电路能接收并显示3 个 LED 发送的数字信息。
(3)LED 控制电路外接 3 路音频信号源,在正常照明和定位的情况下,测量电路能从 3 个 LED 发送的语音信号中,选择任意一路进行播放,且接收的语音信号均无明显失真。
(4)LED 控制电路采用+12V 单电源供电,供电功率不大于 5W。
(5)其他。
3系统方案本系统主要由电源模块传感器检测模块测量电路显示模块,下面分别论证这几个模块的抉择。
3.1电源的论证与选择方案一:直接使用电池组供电,该电源随着使用电压不稳。
方案二:采用开关电源效率高,但是需要购买,且比较贵。
方案三:自行设计稳压电源模块给系统各部分供电,由于各稳压芯片不贵,而且电压可调,做好滤波设计,使用效果也不错。
综合以上三种方案,选择方案三。
3.2光敏传感器模块的论证与选择光敏传感器是利用光敏元件将光信号转换为电信号的传感器,它的敏感波长在可见光波长附近,包括红外线波长和紫外线波长。
光传感器不只局限于对光的探测,它还可以作为探测元件组成其他传感器,对许多非电量进行检测,只要将这些非电量转换为光信号的变化即可。
3.3控制系统的论证与选择AT89C52这种单片机对开发设备的要求很低,开发时间短。
写入单片机内的程序还可以进行加密。
再者AT89C52目前的售价比8031还低,市场供应也很充足。
所以选用AT89C52为主控芯片。
图2—3 AT89C52单片机的基本结构3.4显示模块的论证与选择LED数码管显示实现原理简单,显示直观,编程简单,但显示内容单一,若要同时显示坐标轴,区域位置等诸多信息则需要大量的数码管,而且不能显示中文,由此增加了电路的复杂程度,也加大了编程的难度。
LCD可以设置显示坐标轴等信息,它具有低功耗,可视面大,画面友好及抗干扰能力强等功能,其显示技术已经得到广泛的应用。
综上所述,选用LCD1602液晶显示屏更优。
4 方案描述按照设计的基本要求,系统可分为三大模块,数据采集模块、控制器模块、人机交互界面模块。
其中数据采集模块由电阻应变片传感器、信号的前级处理和A/D 转换部分组成。
转换后的数字信号送给控制器处理,由控制器完成对该数字量的处理,驱动显示模块完成人机间的信息交换。
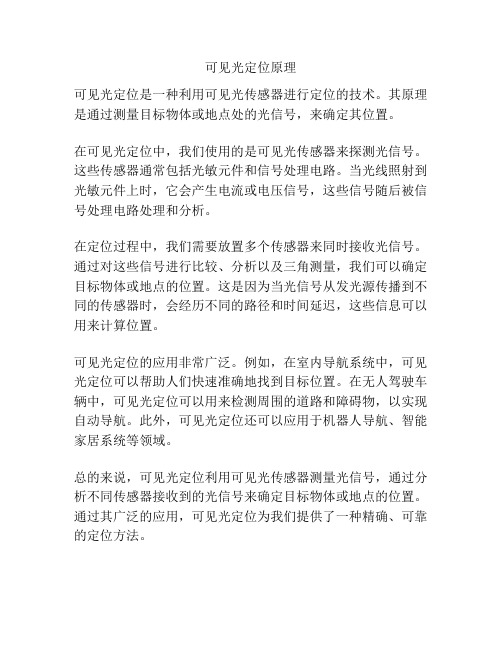
可见光室内定位装置模块设计图4.1 光源及探测器特性实验选用 3W 的大功率白光 LED 作为信号源,为在尽可能不影响光源正常工作的前提下实现稳定可靠的无线通信,实验选用略低于额定工作电流的 500mA 作为直流偏置点。
图 2 所示为白光 LED 光源及光电探测器特性。
由图 2 ( a )可知,在最大工作电流范围内,LED 光源功率与电流呈线性关系,光源具有良好的调制特性。
图 2 ( b )为使用积分球测得的白光 LED 发光光谱,可见白光 LED 光源发出的光谱主要包括峰值在 442nm 处由 LED 自身发出的蓝光和峰值在 561nm 处由荧光粉受激发产生的黄光。
而实验选用的光电探测器的光谱最大响应灵敏度在516nm 处,如图 2 ( c )所示,位于蓝光和黄光的峰值波长之间,且光谱响应范围涵盖整个可见光波段。
光敏传感器 信号放大器 信号转换 单片机 LCD 显示键盘控4.2驱动电路LED 驱动电路除了提供足够宽范围的开关电流以保证白光 LED 的正常工作外,还须提供合适的静态工作点,使光源能输出足够的功率并具有良好的线性度,确保信号经调制后能线性输出。
设计的白光LED光源驱动电路经过STM89C52处理器编码产生的传输信息作为驱动电路的输入,将输入信号进行放大的同时给予一定的偏置,确保LED 光源正常工作,该电路可根据所用光源的特性通过调节可变电阻值实现对输出量的改变,依据实际应用中的光源参数进行灵活调节。
4.3数据编码数据传输的格式包括:起始码头、地址码、地址反码、指令码、指令反码和结束码。
码头由一个连续的235φs的高低电平组成,结束码由一个150φs低电平组成。
地址码、地址反码、指令码和指令反码均为8位数据格式,按照低位在前高位在后的顺序发送,增加地址反码和指令反码是为了提高信息传输过程中的准确性和可靠性。
光源在循环发送位置信息的过程中,在空闲时隙系统向 LED 光源发送的均为高电平,以保证 LED 光源能正常提供照明服务。
我们将一个逻辑1的传输设定为112φs(28φs高电平和84φs低电平),一个逻辑 0 的传输设定为56φs(28φs高电平和28φs低电平),具体数据编码格式如图3.3所示。
图3.3反映位置信息的数据格式“ 0-256-34-221 ”,其中“ 0 ”字段即LED光源对应区域的地址坐标,“ 34 ”字段表示对当前坐标在室内环境中的一种具体提示指令。
根据标签定位技术的特点,为避免在定位区域中出现待测目标同时接收多个信号源发来的位置信息而出现的混乱现象,系统在发射端会对多个 LED 光源进行分时发送信号。
当传输信号的频率大于 60Hz 时,白光 LED 灯不会出现明显的闪烁现象,人眼也无法分辨 [11-12 ] ,但如果出现连续的逻辑 1 或连续的逻辑 0 时,将会导致 LED 光源发光亮度发生变化,影响照明效果。
因此在系统中采用上述编码方式可保证序列中每一比特由两个变化脉冲组成,可以有效减少 LED 光源在发送定位信息时对照明产生的影响。
图3.3 数据编码示意图4.4数据解码在接收端,光电探测器将接收到的位置信息传送给滤波放大电路,由于实验中选用的是反向放大电路,因此经过滤波放大处理后的信号与原始信号的相位相反,并且信号被整形为 TTL (晶体管 - 晶体管逻辑)电平的串行信息,利用STC89C52RC处理器的输入捕获功能对信号进行解码。