防护林喷涂机的文献综述
喷涂机械手 文献综述
本科毕业设计(论文)文献综述课题名称:关节式喷漆机器人设学院(系):年级专业:学生姓名:指导教师:完成日期:国外喷漆机器人发展概况喷漆机器人在国外的使用可以追溯到20世纪中叶。
1951年,美国AustinMotors Longbridge公司开始尝试利用简单的3轴机器人定点自动涂装汽车外身。
1958年,美国Morris Motors Cowley公司成功安装了一条高产出的涂装生产线,把所有的汽车外身的涂装工作交给3台3轴机器人(其中,2台安装在流水线的两侧,l台安装在流水线上方)完成。
那时由于受机器人的自由度和汽车内身形状复杂等因素的限制,3轴机器人还不能对汽车内身进行涂装作业。
到了七、八十年代,随着第二代多轴机器人的研制工作取得很大进展,美、日、欧等国的汽车涂装线,己使用多轴机器人对车身内部难以到达的地方进行涂装作业,朝着喷漆车间无人化的目标迈进了一大步。
例如,Trallfa公司80年代推出的柔性机器人喷漆系统TRACS。
经过五十多年的研究和发展,机器人喷涂技术在国外已较成熟。
随着喷涂机器人的技术不断创新,喷涂精度空前提高,在世界发达国家喷涂机器人得到了广泛的应用。
著名的国外喷涂机器人厂家有瑞士和瑞典的ABB和日本的安JIlMOTOMAN公司,同时德国的KUKA公司、日本的FANUC公司以及美国的ADEPT公司均有生产喷涂机器人。
同时还有很多小的生产企业,如瑞士金马股份有限公司生产和研发的静电粉末喷涂设备。
到目前为止ABB公司是世界领先的喷涂自动化供应商,在全球范围内供应喷涂机器人,在喷涂机器人领域以及相关的喷涂技术领域都具有丰富的经验与技术,特别是为高端汽车喷涂开发出高性能的IRB5500喷涂机器人以及为低成本的消费类电子产品喷涂开发了小型的IRB52喷涂机器人。
在汽车喷涂方面,最新的喷涂工艺可保持油漆雾化装置(即旋杯)在其最佳路径而尽可能减少非喷涂时间。
对机器人而言,该新工艺则要求其具备高速度和高加速度能力。
喷涂机研究报告
喷涂机研究报告喷涂机研究报告一、研究背景喷涂机是一种常见的涂装设备,广泛应用于汽车、航空、建筑等领域。
随着科技的不断进步,喷涂机的技术也在不断更新换代,以满足不同领域的需求。
因此,对喷涂机的研究和开发具有重要的意义。
二、研究内容本次研究主要对喷涂机的工作原理、结构和应用进行了深入探讨。
1. 工作原理喷涂机的工作原理是利用高压气体将涂料喷射到被涂物表面,形成均匀的涂层。
具体来说,喷涂机通过压缩空气或氮气等气体,将涂料从喷枪中喷出,形成雾状的涂料颗粒。
这些颗粒在空气中迅速干燥,形成均匀的涂层。
2. 结构喷涂机的主要结构包括喷枪、压缩空气系统、涂料供给系统和控制系统等。
其中,喷枪是喷涂机的核心部件,负责将涂料喷射到被涂物表面。
压缩空气系统则提供高压气体,使涂料能够被喷射出来。
涂料供给系统则负责将涂料输送到喷枪中。
控制系统则控制喷涂机的工作状态,确保涂料喷射的均匀性和稳定性。
3. 应用喷涂机广泛应用于汽车、航空、建筑等领域。
在汽车制造中,喷涂机被用于喷涂车身和零部件,以保护车身表面和提高外观质量。
在航空制造中,喷涂机被用于喷涂飞机外壳和零部件,以提高飞机的耐久性和安全性。
在建筑领域中,喷涂机被用于喷涂墙面和屋顶等建筑材料,以提高建筑的防水性和美观性。
三、研究成果本次研究对喷涂机的工作原理、结构和应用进行了深入探讨,为喷涂机的研究和开发提供了参考。
同时,本次研究还发现了喷涂机在应用过程中存在的一些问题,如喷涂效率低、涂层质量不稳定等,这些问题需要进一步研究和解决。
四、结论喷涂机是一种重要的涂装设备,具有广泛的应用前景。
本次研究对喷涂机的工作原理、结构和应用进行了深入探讨,为喷涂机的研究和开发提供了参考。
同时,本次研究还发现了喷涂机在应用过程中存在的一些问题,需要进一步研究和解决。
喷涂和喷焊技术在机械设备维修中的应用之我见

李忠文( 辽河油田锦州采油厂机修厂 , 辽宁 锦州 1 2 1 2 0 9 )
摘 要: 机械 设备 在使 用过程 中 出现 问题绝 大部 分原 因是 因 为零 件过 度磨 损 , 并且 没有及 时进 行修 复 , 造成 零件 失修 而报 废 不能 够使 用 , 这 种情 况造 成 的浪 费也是 相 当大 , 会 增加 企 业 设备 投 资的 成本 。 而喷涂 和喷 焊技 术使 用在 维 护设备 中具有 很 大优 势 , 比如 其技术 十分 灵活且成 本低 , 使 用效果 更是 高 , 可 以为 企 业减 少设备 投 资 , 增加 企 业利 润 , 因此喷 涂和 喷 特点
喷涂 技术 简单来 讲就是针 对设 备表面 处理 的一项技 术 , 利 用 热源对 将喷涂 材料 进行加 热 , 让材料达 到软 化状态 之后 以高 速 喷射 的方式射 到需 要处理 的材料表 面 , 让原 本脆弱 的表 层变 的更加 牢固 。喷 涂技 术与其他 处理技 术相 比有很 大优势 : 操 作 方便、 灵活 , 成本 低 因此具有 很高 的经济性 ; 另外 能够 使用 喷涂 技 术 的领域 十分 广泛 ; 制 作 出喷涂 材料 十分 方便 , 而 且 对需 要 常 用的 喷焊 材料 有 自熔性 合金 粉末 、 镍基 粉末 、 钻基 粉末 喷 涂的材 料要求 不高 ; 因此 喷涂技 术十分 使用于 机械 设备零 件 以及 铁基 粉末 。其 中 自熔性 合金 粉末 是喷焊 中最 常使用 的材 的 日常维 修与突 发情 况的抢修 中 。除 上述优 点外 , 喷 涂技术还 料 , 由于其熔 点相对 其他 材料而 言比较低 , 因此 自熔性 十分 好 , 具备 耐高温 、 耐磨 、 抗腐蚀 性和抗氧化性 佳的特 点。 使用 范 围也 比较 广泛 , 对设 备 可以进 行耐 磨 、 耐 腐蚀 以及 耐氧 1 . 2功能涂层 化 或者耐 热处 理。而其 他材料 也相对而 言使用 范 围较 窄 , 使用 1 . 2 . 1 耐 磨性涂 层 条件受到 限制 。 机械 设备 出现 故 障有 很大 一部 分 的原 因是 零件 长期 磨 损 3结语 带 来 的损伤 , 造成 设备 无法 进行 正 常运转 , 如果 在零 件磨 损 初 综上 所述 可 以 了解到 喷涂 和喷 焊技 术可 以修 复 受损 设备 期 没有 关注 , 那 么对企 业生 产 力将会 带 来 巨大 影 响 , 直接 应就 零件 , 并 且 该类 型技术 有很 大 的发 展空 间 , 因此 想要 提高 更大 是 生产 质量 降低 。因此为 了让 机械设 备的耐 磨性变 得更好 , 常 的发展 空 间和 作用就要 对喷涂 和喷焊 技术进行 不断 研究 , 并在 常会使用 喷涂技 术在零 件表面 多涂厚 厚的耐 磨涂 层 , 这样不 仅 企业 间进行大 力推广其优 势。 可 以减 少零 件 间的 相互 磨损 , 还 能够 减 少设备 更换 频 率 , 这样 参考文献 : 就可 以节约设 备成本投资 , 提 高企业收益 。 【 1 ] 申海 忠. 探讨 喷 涂和 喷焊技 术在 机械 设备 维修 中的应用 1 . 2 . 2耐 热抗氧化 涂层 [ J 】 , 中国石 油和 化工标准 与质量: 2 5 0 . 利用 喷涂技 术可 以减 少设 备在高 温 、 熔融环 境下受 到氧化 [ 2 ] 王鑫. 热 喷涂和 喷焊技术在 机械 设备维修 中的应用[ J 】 , 甘 损害, 为设备 提供较 好的保 护层 , 延长 设备使 用时 间 , 降低 因为 肃科技, 2 0 0 9 , 2 5 ( 2 4 ) : 5 9 - 6 0 . 腐蚀 性带来 的设备损失 。 [ 3 ] 裴 海, 杜 万才 . 热 喷涂 、 热 喷焊技 术在 设备 维修 中的应用 1 . 2 . 3 耐 腐蚀涂层 富[ J ] , 机械工倒 币, 1 9 9 5 , ( 2 ) : 3 5 — 3 6 . 喷涂技 术发展 初期 , 机械 设备 受到的 腐蚀大部 分来 自于大 [ 4 ] 机 械工 倒 币. 机 械设备 维修 中热 喷涂与 喷焊技术 研 究f J ] , 气 腐蚀 和浸 渍腐 蚀 。工业 气体 与盐 性 气体 容易造 成 前者 情况 中国高新技术 企业. 2 0 1 3 。 3 2 ( 2 7 5 ) : 3 5 — 3 6 . 出现 , 而后 者 则更 多的 是 因为化 学 、 食 品加 工 引起 的 。 当该喷
喷涂机的用途
喷涂机的用途喷涂机是一种用于将涂料、油漆、染料等物质均匀地喷涂在不同表面上的机械设备。
它的主要功能是通过压缩空气或其他气体将涂料溶剂雾化并喷射出来,使其均匀地附着在需要上色的物体表面上。
喷涂机被广泛应用于各个领域,主要用于实现以下几个方面的实际用途。
首先,喷涂机在工业生产中起到了重要的作用。
它可以用于涂装汽车和摩托车的车身外壳,使其具有美观的外观。
同时,喷涂机还能够在汽车制造中的许多细节上进行喷涂,例如发动机盖、车顶、内饰件等。
此外,在家具制造业中,喷涂机可以用于涂装木制家具的表面,不仅可以起到美化家具的作用,还能够保护木制家具免受损坏和腐蚀。
其次,喷涂机还广泛应用于建筑业。
建筑工地上,喷涂机常用于喷涂墙面。
喷涂墙面可以提高施工的效率,也可以保证墙面颜色均匀一致,并使墙面漆薄厚均匀。
另外,喷涂机也可以应用于室内装修。
它可以喷涂液态材料在天花板和地板上,或者进行纹理喷涂。
使用喷涂机进行室内装修可以节省大量的施工时间和人力成本。
喷涂机还可以应用于木工行业。
例如,在制造家具和门窗时,喷涂机可以用于给木材表面涂上防水、防污、防腐剂等涂料。
喷涂机的喷洒效果能够让涂料充分渗透到木材内部,提高了木材的使用寿命。
此外,喷涂机还可以使用在木地板的涂装,可以实现对木地板的快速上料、快速加工。
另外,喷涂机还可以应用于金属加工行业。
喷涂机可以用于喷涂金属表面,使其具有防锈、防腐蚀等功能。
特别是在汽车、船舶、飞机等大型机械制造中,金属的防腐蚀喷涂尤为重要。
喷涂机的使用可以提高涂层的质量,避免因为金属表面被侵蚀而引起的机械失效问题。
此外,喷涂机还可以用于在金属产品表面涂上特殊的颜色,以增加其美观度和市场竞争力。
最后,喷涂机还可以应用于艺术创作中。
喷涂机因其喷涂效果的特殊性而被广泛用于艺术创作领域。
艺术家可以使用喷涂机创建各种各样的艺术品,例如壁画、画布、装饰品等。
喷涂机可以实现更自由的创作方式,使得艺术家可以通过调整喷涂机的喷涂角度和强度,实现不同层次和颜色的涂装。
电弧喷涂长效防护涂层的发展应用和研究现状

电弧喷涂 属 于热 喷涂 的 一种 。它 是 以 电能作 为热 源 ,两根 喷涂 材 料金 属 丝为 自耗 性 电极 , 利用 电极 端 部产 生 的 电弧 热能 使其 熔化 ,同 时用 压缩 气流 雾化 后 喷射到 基 体的热 喷涂 方法 。 其原理 如 图l 所示 涂层 的 制备过 程
一
瑞士 工学 博 士M U S h o 于 1 1 年 首 次提 出 电弧喷 涂 的设 计 ,1 1 年 .. co p 93 96 制 成 了 实用 型 的 电弧 喷枪 。2 世 纪 3 年 代 电弧 喷 涂 作 为 主要 的热 喷 涂 方 0 O
33 电弧 喷涂 铝涂 层 的防护 原理 . 电弧喷涂 铝 涂层 和 复合涂 层对 钢 铁构 件的 防腐 作用 主要 基于 以下两个
粘 结在 一起 ,从 而 形成 涂 层 。涂 层 的形成 过 程 决定 了涂 层 的结 构 ,它 是 由
无 数变 形颗 粒相 互 交错 成 波浪 式堆 叠 在一 起 形成 的层 状 组织 结 构 ,涂层 主
要 由片状 变形 颗粒 、气 孔和 氧化 物夹 杂所 组成 。
验。
由国家 自然 科学 基 金资助 的 重大项 目 “ 料大 气腐 蚀数 据积 累及 腐蚀 材 与 防护 研 究 ”,对 热 喷涂 的涂 层进 行 了大 气 曝露 腐蚀 试验 和 耐海 水腐 蚀试 海 水腐 蚀试 验分 别 在青 岛 、厦 门、榆 林海 水试 验站 进行 ,分别代 表我
1 流 电源 ;2丝盘 ;3金属 丝 ;4送 丝 滚轮 ;5导 电块 ;6导 电嘴 : . 直 一 . . 一 一 7空 气喷 嘴 ;8压 缩 空气 ;9电弧 ;1. 一 一 一 O喷涂 粒 子 ;1- 1涂层 ; 1一 2工件 图1 电弧 喷涂 原理 示意 图 2 电曩喷涂 技 术的发 展概 况
木制家具喷涂机器人研究综述
第51卷㊀第8期2023年8月㊀㊀林业机械与木工设备FORESTRYMACHINERY&WOODWORKINGEQUIPMENTVol51No.8Aug.2023综㊀㊀述木制家具喷涂机器人研究综述张子超1ꎬ㊀王㊀琢1ꎬ2∗ꎬ㊀吴金霆1ꎬ㊀王乃宇1(1.东北林业大学机电工程学院ꎬ黑龙江哈尔滨150040ꎻ2.东北林业大学林业人工智能研究院ꎬ黑龙江哈尔滨150040)摘㊀要:随着智能制造技术的发展ꎬ机器人广泛应用于现代工业生产中ꎬ其中喷涂机器人在汽车制造等领域已成为主要应用手段ꎮ而在木制家具喷涂机器人研制领域ꎬ由于木制家具结构多样㊁工艺复杂ꎬ喷涂机器人喷涂轨迹制作成本较高且普适性不强ꎬ因此应用处于起步阶段ꎮ研究结合喷涂机器人构型㊁喷枪种类㊁喷枪漆膜生长模型㊁喷涂轨迹规划及优化等几个方面对木制家具喷涂机器人进行分析讨论ꎬ并对木制家具喷涂机器人的研究做出展望ꎬ以期为木制家具喷涂机器人后续发展提供理论参考ꎮ关键词:喷涂机器人ꎬ木工机械ꎬ漆膜生长模型ꎬ轨迹规划中图分类号:TP242㊀㊀文献标识码:A㊀㊀文章编号:2095-2953(2023)08-0004-08AreviewofresearchonwoodenfurnituresprayingrobotsZHANGZi ̄chao1ꎬWANGZhuo1ꎬ2∗ꎬWUJin ̄ting1ꎬWANGNai ̄yu1(1.NortheastForestryUniversityꎬHarbinHeilongjiang150040ꎬChinaꎻ2.ResearchInstituteofForestryArtificialIntelligenceꎬNortheastForestryUniversityꎬHarbinHeilongjiang150040ꎬChina)Abstract:Withthedevelopmentofintelligentmanufacturingtechnologyꎬrobotsarewidelyusedinmodernindustrialproductionꎬamongwhichsprayingrobotshavebecomethemainmeansinautomobilemanufacturingandotherfields.Howeverꎬinthefieldofwoodenfurnituresprayingrobotdevelopmentꎬduetothediversestructureandcomplexprocessofwoodenfurnitureꎬtheproductioncostofsprayingtrajectoryofsprayingrobotishighandtheuniversalityisnotstrongꎬsotheapplicationisinitsinfancy.Thispaperanalyzesanddiscussesthewoodenfurnituresprayingrobotincombinationwiththeconfigurationofsprayingrobotꎬthetypeofspraygunꎬthegrowthmodelofspraygunpaintfilmꎬandtheplanningandoptimizationofsprayingtrajectoryꎬandmakesaprospectfortheresearchofwoodenfurni ̄turesprayingrobotꎬsoastoprovideareferenceforthesubsequentdevelopmentofwoodenfurnituresprayingrobot.Keywords:sprayingrobotꎻwood-workingmachineꎻpaintfilmgrowthmodelꎻtrajectoryplanning㊀㊀收稿日期:2023-05-11第一作者简介:张子超ꎬ硕士研究生ꎬ研究方向为工业机器人轨迹规划ꎬE-maill:zzc6731@163.comꎮ∗通讯作者:王琢ꎬ副教授ꎬ硕士ꎬ研究方向为林业工程自动化㊁检测与测试技术ꎬE-mail:wangzhuo@nefu.edu.cnꎮ喷涂是使用喷枪或蝶式雾化器ꎬ利用压力或离心力将涂料打散成雾状液滴ꎬ进而施涂于物件表面的涂装方法[1]ꎬ传统喷涂由工人手持喷枪完成ꎬ在喷涂环境中含有大量的苯㊁醛和酮等有害物质ꎬ对工人的身体造成严重伤害[2]ꎮ而且工人技术水平不一ꎬ喷涂质量参差不齐ꎬ无法保证批量生产的品控问题ꎮ另外人工喷涂的涂料损耗率超过47%ꎬ与机器人喷涂相比涂料利用率较低ꎬ浪费严重[3]ꎮ随着工业机器人技术的发展ꎬ在汽车等大批量生产的行业中喷涂机器人逐渐取代人工进行喷涂作第8期张子超ꎬ等:木制家具喷涂机器人研究综述业ꎬ有效提高了喷涂质量ꎬ同时也避免了工人直接暴露在喷涂环境中ꎮ喷涂机器人在木制家具行业的应用主要在大型批量化生产中ꎬ通过人工示教㊁离线编程等技术可以生成机器人喷涂轨迹[4]ꎮ但是由于家具行业的特殊性ꎬ实木板式家具以及组装定制化家具的种类繁杂㊁样式多变ꎬ如果采用人工示教或离线轨迹编程的方法进行喷涂轨迹规划效率较低ꎬ总体的成本也较高ꎬ所以目前许多小型家居制造厂仍然采用人工的方式进行家具喷涂ꎮ近年来ꎬ国内外有许多研究人员对喷涂机器人进行研究ꎬ也有一些企业推出了各式各样的喷涂机器人ꎬ主要的研究方向集中在漆膜生长模型的建立ꎬ喷涂轨迹规划及优化等方面ꎮ本文将从机器人构型和喷枪类型的角度阐述木制家具喷涂机器人发展现状ꎬ对常用的漆膜生长模型ꎬ喷涂轨迹规划及优化方法进行总结和综述ꎬ并对木制家具喷涂机器人未来发展进行展望ꎮ1㊀研究现状1.1㊀喷涂机器人研究现状能够实现高精度的运动控制和稳定的静态控制是喷涂机器人发展的前提[5]ꎮ高精度的运动控制就是机器人末端执行机构能够准确地按照规划的轨迹行走ꎮ稳定的静态控制是指机器人能够稳定地保持所需姿态ꎮ这与机器人的机械结构性能㊁电机控制算法㊁传感器性能等因素有关ꎮ目前的喷涂机器人按结构可分为:固定式㊁往复式㊁框架式㊁串联式[6]ꎬ各类型喷涂机器人如图1所示ꎮ图1㊀各类型喷涂机器人㊀㊀固定式喷涂指喷枪以固定的位姿安装在支架上进行喷涂作业ꎮ由于喷枪是完全固定在支架上的ꎬ即零自由度ꎬ所以只能进行简单的线性喷涂ꎬ相对应的控制算法也最为简单ꎮ往复式喷涂指将喷枪安装在水平或垂直的直线轨道上ꎬ可以进行往复运动的喷涂方式ꎮ它相较于固定式喷涂方式增加了一个运动自由度ꎬ可以完成对简单平面的喷涂[7]ꎮ固定式喷涂和往复式喷涂都需要搭配传送带进行使用ꎬ待喷涂件放在移动的传送带上ꎬ多集成于家具生产流水线上ꎬ适用于工艺简单㊁大批量的板式家具喷涂ꎮ框架式喷涂机器人多安装于单独喷涂室中ꎬ能够与外界环境分离开ꎬ减少工人与油漆的直接接触ꎮ该类机器人一般有三个自由度以上ꎬ由多个移动副和转动副共同构成ꎮ它的主要运动方法为直线运动ꎬ控制算法简单ꎮ但该类机器人占地面积较大ꎬ受机器人结构限制ꎬ喷涂灵活性也较差ꎬ多用于板式等简单结构家具的喷涂ꎮ串联式喷涂机器人指将喷枪作为工业机器人的末端夹持工具的喷涂机器人ꎬ常见的多轴串联机器人多为六自由度以上ꎬ即由六个及六个以上转动副和连杆组成的串联机器人ꎮ该类机器人因其占地面积小ꎬ工作空间大ꎬ可以完成复杂的喷涂轨迹等优点而被广泛应用于喷涂行业ꎮ但该类机器人控制算法复杂ꎬ喷涂轨迹需要进行规划ꎬ机器人成本也较高ꎬ对于喷涂机器人的轨迹自动规划研究也都是基于此类型机器人进行的ꎮ1.2㊀喷枪研究现状喷涂机器人常用的喷枪可分为空气喷枪㊁混气喷枪㊁无气喷枪和静电喷枪[8]ꎬ喷枪种类如图25林业机械与木工设备第51卷所示ꎮ图2 喷枪种类空气喷枪的接口一般分为三路空气接口和一路涂料接口ꎬ三路空气接口分别为雾化空气接口ꎬ喷幅空气接口和开关控制空气接口ꎮ空气喷枪利用雾化空气接口中的压缩空气(0.2~0.6MPa)将喷枪口部的涂料吹散雾化成小液滴[9]ꎬ然后通过喷枪出口两侧的喷幅调节气流吹出形成涂料喷炬ꎬ开关控制空气接口则控制喷枪是否能够喷出涂料ꎬ而涂料接口一般分为进料口和出料口ꎬ涂料在喷涂过程中是循环流动的ꎮ空气喷枪因其对涂料的粘度要求不高ꎬ可喷涂各种涂料而应用广泛ꎬ但涂料的利用率相对较低ꎮ无气喷枪利用高压涂料从喷嘴喷出时产生剧烈膨胀而雾化形成的细小颗粒进行喷涂ꎬ涂料在进入喷枪前需要先加压到15~40MPa[10]ꎬ因此需要搭配增压隔膜泵使用ꎮ无气喷枪的涂料利用率达60%ꎬ相较于空气喷枪ꎬ前者能够喷涂粘度较高的涂料ꎬ所产生漆膜厚度也较厚ꎬ也更适用于木制家具品喷涂ꎮ混气喷枪又叫空气辅助高压无气喷枪ꎬ结合了空气喷枪与无气喷枪二者的优点ꎮ与空气喷枪相比涂料喷出时的速度小ꎬ极大程度上减少了过喷反弹现象ꎬ与无气喷枪相比涂料无需压缩到很大压力ꎬ一般在5MPa以下ꎮ混气喷枪的涂料雾化分为两步ꎬ第一步与无气喷枪相似ꎬ由高压涂料接触空气时产生的剧烈膨胀雾化成小颗粒ꎬ然后由喷枪出口处的喷幅气流进行二次雾化ꎮ混气喷枪所产生的喷炬效果最好ꎬ涂料留着率也在70%以上[11]ꎮ静电喷枪是利用电晕放电现象ꎬ将工件接地带正电荷ꎬ涂料雾化装置接负高压带负电荷ꎬ从而在二者之间形成高压静电场ꎬ涂料在电场力和喷枪气流的作用下附着在工件表面形成漆膜[12]ꎮ因为涂料与工件之间存在电场力ꎬ涂料的附着率很高ꎬ通常在95%以上ꎬ极大程度上减少了涂料浪费ꎮ2㊀喷枪漆膜生长模型问题构建准确的喷枪漆膜生长模型是实现机器人喷涂轨迹自动规划的前提ꎬ而影响喷枪漆膜生长模型的因素有很多ꎬ如喷枪类型㊁喷涂压力㊁喷涂流量㊁喷涂温度㊁涂料稠度等ꎬ因此在研究喷枪漆膜生长模型时需要保证上述因素不变ꎮ常用的漆膜生长模型分为两类[13]ꎬ一类是无限范围模型ꎬ例如柯西分布模型[14]和高斯分布模型[15]ꎬ该类模型可以直接推导出积分函数ꎬ计算量小ꎻ另一类是有限范围模型ꎬ例如椭圆分布模型㊁抛物线分布模型[16]㊁β分布模型[17]等ꎬ该类模型能够更好地描述漆膜厚度的实际分布情况ꎬ准确度高ꎮKlein[18]提出一种梯形分布模型ꎬ该模型假设喷涂过程中油漆会形成一个锥形喷炬ꎬ在喷枪中轴线投影的中心区域内漆膜是均匀分布的ꎬ而在边缘是正弦递减的ꎮ再由单位时间涂料流量以及涂料均匀分布区域半径和正弦递减分布区域半径求得喷枪漆膜生长模型ꎮ魏丽娜等[19]在抛物线模型的基础上提出了一种考虑喷涂距离的漆膜生长模型ꎬ通过变距喷涂轨迹规划来改善面片交界处的涂层厚度ꎮ王慧琛等[20]基于正态分布模型建立了喷枪漆膜生长模型ꎬ提出了一种结合喷涂间距和喷涂高度的喷涂方案ꎮ模型中当喷涂间距s=2σ时ꎬ涂层厚度最为均匀ꎬ此时喷涂间距s与喷涂高度h之间的关系为:s=2htanθ/3ꎬ然后通过对防盗门的喷涂实验验证了模型的正确性ꎮ周波等[21]对特定的空气喷枪进行静态平面喷涂实验ꎬ基于高斯分布模型采用Levenberg-Maquart算法求解模型参数ꎬ建立了一种能够适应涂层不同分布情况的静态漆膜生长模型ꎮ曾勇等[22]在抛物线分布模型的基础上考虑喷枪与喷涂面之间的夹角影响ꎬ建立了带有倾角参数的喷枪漆膜生长模型ꎬ该模型可以用于带有犄角的复杂曲面的喷涂轨迹规划ꎮAriKan[23]使用β分布模型建立了喷枪在平面上匀速直线喷涂以及连续两条喷涂轨迹重叠情况的漆膜生长模型:T(x)=Tmax(1-4x2ω2)β-1ꎬ-ω2£x£ω2式中T(x)为漆膜厚度ꎬTmax为漆膜最大厚度ꎬω为漆膜宽度ꎬx为在喷枪轨迹垂直方向上到漆膜厚度最大点的距离ꎮ通过标定试验建立了固定喷涂距离6第8期张子超ꎬ等:木制家具喷涂机器人研究综述d和速率v与漆膜厚度T(x)之间的关系ꎬ并使用最小二乘法拟合出相应的β值ꎬ这为根据不同的工件形状和膜厚要求设置最佳喷涂距离㊁速度㊁喷角等参数值提供了数据支持ꎬ同时为后续喷涂轨迹仿真实验时的漆膜厚度计算奠定了基础ꎮ张永贵[24]等通过分析自动空气喷枪的雾化机理和进行喷枪静止喷涂实验ꎬ观察到喷涂区域呈现椭圆形分布ꎬ进而提出了一种椭圆双β分布模型:Txꎬy()=Tmax1-x2a2æèçöø÷β1-11-y2b21-x2a2æèçöø÷éëêêêùûúúúβ2-1ꎻ(-a£x£aꎬ-b1-x2a2æèçöø÷12£y£b1-x2a2æèçöø÷12式中的两个β指数分别反映了漆膜在椭圆长轴和短轴上的厚度分布情况ꎬ而椭圆的长轴a㊁短轴b以及两个β的值则通过单行程喷涂实验所测得的数据结合遗传算法得到ꎮ椭圆双β分布模型相较于β分布模型更能反映空气喷枪喷幅调节阀对漆膜厚度分布的影响ꎮ卢晓东[25]等在椭圆双β分布模型的基础上引入喷涂距离h作为变量ꎬ建立了立体漆膜生长模型ꎬ这使得在二次喷涂轨迹规划时可以根据首次喷涂的漆膜厚度实时改变喷涂距离ꎮ华霄桐[26]等基于椭圆双β分布模型提出了一种互补喷枪模型ꎬ并针对NURBS自由曲面进行了喷涂轨迹优化ꎬ提高了膜厚均匀度ꎮ刘洋[27]针对静电旋杯喷枪构建了一种双偏置β分布模型ꎬ通过改变偏距的大小可以较好地拟合静电旋杯不同成形空气气压时的漆膜生长模型ꎮ3㊀喷涂机器人轨迹规划问题喷涂机器人轨迹规划问题是一种典型的覆盖路径规划(CoveragePathPlanningꎬCPP)问题[28]ꎬ该问题通过设定一系列轨迹点来实现对目标区域的全覆盖ꎮ常用的喷涂轨迹模式有栅格型[29]和螺旋型[30]ꎬChen[31]通过平面喷涂实验对比了采用两种喷涂方式所得到漆膜厚度分布情况ꎬ栅格型喷涂方法优于螺旋型喷涂方法ꎬ原因是栅格型喷涂方法可以通过相邻轨迹补偿来使得漆膜厚度更加均匀ꎮ3.1㊀人工示教轨迹规划方法人工示教法指具有丰富喷涂经验的工人师傅手持机器人示教器或拖动机器人进行喷涂演示ꎬ同时电脑记录机器人的末端行走轨迹ꎬ从而实现喷涂机器人对人工喷涂轨迹的复现[32]ꎮ人工示教法对喷涂工人的经验水平要求较高ꎬ且制作出来的喷涂轨迹无法与工件表面的距离始终保持一致ꎬ也就是说无法保证漆膜厚度的均匀性ꎮ图3㊀人工示教(左)和示教器(右)对于木制家具来讲ꎬ其种类繁多ꎬ形状各异ꎬ尤其是面对小批量㊁定制化家具喷涂时ꎬ人工示教法显得过于复杂ꎬ效率偏低ꎬ人工成本极高ꎮ因此ꎬ对于机器人喷涂轨迹自动规划方法的研究一直是热点问题ꎮ3.2㊀自动轨迹规划方法自动轨迹规划方法指根据工程师提前设置好的喷涂参数信息以及工件的CAD模型或点云数据ꎬ通过特定的算法自动生成喷涂轨迹ꎬ再由机器人逆运动学公式计算出机器人各关节角度ꎬ通过多项式插值等方法进行机器人关节轨迹规划ꎬ进而实现机器人喷涂轨迹规划[33]ꎮ图4㊀喷涂机器人自动轨迹规划流程影响喷涂机器人轨迹自动规划因素有很多ꎬ如喷枪漆膜生长模型㊁待喷涂件模型㊁喷涂路径样式㊁喷涂工艺需求㊁喷涂轨迹参数等ꎮ喷涂轨迹自动规划一直是喷涂机器人领域的研究热点与难点ꎬ20世纪80年代至今不断有学者提出新的喷涂轨迹自动规划方法ꎮ从工件模型数据的角度可分为基于CAD模型和基于点云数据的喷涂轨迹自动规划ꎬ而工件的点云数据一般由视觉或激光扫描仪获取ꎮ喷涂机器人自动轨迹规划流程如图4所示ꎮ3.2.1㊀基于CAD模型的喷涂轨迹自动规划计算机辅助喷涂轨迹规划[34](Computeraided7林业机械与木工设备第51卷toolpathplanningꎬCATP)是指自动建立待喷涂件的CAD模型与制造过程之间关系的一种喷涂轨迹自动规划方法ꎮCATP中常用的CAD模型大致可分为两类[35]:参数化模型和网格模型ꎬ参数化模型有STEP和IGES等格式ꎬ网格式模型有VRML㊁STL和NAS ̄TRAN等格式ꎮ参数化模型包含了零件的点㊁线㊁弧㊁样条㊁曲面以及实体等几何信息ꎬ同时也记录了零件的材料信息ꎬ该类模型对零件特征信息描述比较完整ꎬ增加了数据处理的可能性ꎮ网格式模型则使用多边形网格表示零件的表面信息ꎬ记录了多边形的顶点和法向量等信息ꎬ有着数据量少㊁易于分析的优点ꎮKlein[36]首次将离线编程的思想用于喷涂机器人轨迹规划ꎬ开发了一套基于CAD/CAM方法的喷涂轨迹离线编程系统ꎮ编程人员可以在可视化仿真界面中ꎬ针对待喷工件的三维模型设置喷枪的路径㊁速度㊁距离等参数ꎬ以实现在仿真环境中模拟机器人喷涂过程ꎬ这有助于提高喷涂质量和减少涂料损失ꎮSuh等[37]开发了一种基于SUN/4工作站的自动轨迹规划系统(automatictrajectoryplanningsystemꎬATPS)ꎬ该系统可以根据工件CAD模型的几何特征生成喷涂轨迹ꎬ并实现机器人离线编程和喷涂轨迹仿真ꎮGoodman等[38]开发了一款名为SPRAYTOOL喷涂机器人仿真软件ꎬ并在此基础上提出了一种基于漆膜厚度经验参数表的喷涂轨迹规划的方法ꎮAsakawa等[39]开发了一种基于工件CAD数据的曲面自动喷涂系统ꎬ相较于人工示教法效率提高了50%ꎮAriKan[40]开发了一种曲面喷涂轨迹生成㊁漆膜厚度仿真及喷涂机器人离线编程系统ꎮ该系统通过分析汽车白车身的CAD模型数据得到表面三角面片的形心㊁法线以及曲面长宽方向的曲率等工件表面(workpiecesurface)数据ꎬ结合建立的喷枪漆膜生长模型和提前设置的喷涂策略将工件表面数据偏移得到控制面(controlsurface)数据ꎬ然后连接各个喷涂点组成喷涂轨迹ꎬ最后使用机器人逆运动学求解和离线编程技术自动生成机器人控制程序实现自动喷涂ꎮChen等[41]建立了曲面喷涂轨迹规划通用框架ꎬ基于工件的CAD模型及喷枪漆膜分布模型ꎬ通过近似求解多目标约束优化问题得到最优喷涂轨迹ꎮ胡德州等[42]将STL格式中的三角面片的三个顶点坐标Z轴最大最小值之和的一半定义为该面片的势ꎬ定义最大最小值之差为该面片的能量ꎬ以此为依据对三角面片进行分级和分类ꎬ并按照级和类的高低进行升序排列ꎬ进而减少判断三角面片与切割面是否相交的次数ꎬ提高切片效率ꎮ3.2.2㊀基于视觉与激光扫描仪的喷涂轨迹自动规划随着计算机算力水平的提高和视觉㊁激光等传感器的发展ꎬ实时采集工件的几何特征成为一件可能的事ꎬ基于此技术的喷涂机器人自动轨迹规划也随之发展起来ꎮVincze等[43]介绍了FlexPaint项目ꎬ该项目属于欧盟第五个框架计划ꎬ旨在面向小批量㊁异型工件的自动轨迹规划的喷涂机器人ꎮFlexPaint项目使用激光三角距离传感器检测工件的几何形状ꎬ再根据工件的几何特征(圆柱体㊁球体㊁立方体等)构建几何特征库ꎬ进而生成工件的喷涂轨迹ꎬ该算法大幅度降低了机器人编程量以及人工监管工作ꎬ但在喷涂时传送带上的工件需要处于静止状态[44]ꎮGasparetto[45]使用光幕测量传感器采集木窗的几何特征信息ꎬ基于图论和运筹学提出了一种中国邮差算法以实现涂料均匀条件下的最优喷涂轨迹生成ꎬ并基于MATLAB开发了一款喷涂机器人仿真界面实现对喷涂仿真实验的可视化ꎮ周峰等[46]使用三维激光扫描仪获取工件表面点云数据ꎬ根据喷枪往返次数对点云数据切片求得工件表面交点集ꎬ通过交点偏移和轨迹插补等算法得到喷涂轨迹ꎮ李发忠等[47]使用三维光学扫描仪对工件进行扫描ꎬ得到工件外形的点云数据并进行切片ꎬ提出了针对喷涂速度和间距因素的轨迹优化算法ꎬ提高了漆膜厚度一致性ꎮ林森等[48]使用Kinect相机采集汽车表面点云数据ꎬ并采用基于Sampson加权算子的RANSAC算法对点云数据处理ꎬ随后切片生成漆面划痕的修补轨迹ꎬ实现了车漆修补轨迹的自动轨迹规划ꎮYu等[49]提出了一种边缘保留算法ꎬ将使用激光扫描仪得到的工件点云数据通过立体网格法和边缘保留算法进行分割㊁简化ꎬ避免了点云数据边缘特征的破坏ꎬ并以垂直点云模型主特征向量的方向作为切片方向ꎬ有助于提高漆膜厚度均匀性ꎮ3.3㊀喷涂轨迹优化问题喷涂轨迹优化规划问题(OptimalTrajectoryPlanningProblemsꎬOTPP)来源于对复杂曲面进行分片轨迹规划后面片边界的膜厚均匀性较差ꎬ是一种典型的多目标约束优化求解问题ꎬ常用的算法有粒8第8期张子超ꎬ等:木制家具喷涂机器人研究综述子群算法[50]㊁蚁群算法[54]等ꎮ刁训娣等[51]建立了喷涂效果的目标泛函ꎬ将喷枪轨迹优化问题转换成了有限元法求解泛函极值问题ꎬ并在圆锥面工件上进行喷涂轨迹仿真ꎮ赵德安等[52]按照曲率对复杂曲面进行分片ꎬ分别对单面片进行喷涂轨迹规划ꎬ然后再根据两面片边界线的三种位置关系按照不同喷涂策略进行喷枪轨迹优化ꎬ而优化问题的目标函数为漆膜厚度方差最小ꎮ随后赵德安等[53]将遗传算法用于复杂曲面分片后的喷涂轨迹组合问题上ꎬ提高了轨迹生成效率ꎬ但无法提高喷涂效果ꎮ陈伟等人又使用改进的蚁群算法[54]和改进的粒子群算法[55]求解复杂曲面轨迹优化组合问题ꎬ在满足涂层厚度均匀性要求的同时减少了喷涂时间ꎮ曾勇等[56]针对直纹曲面采用最小二乘圆弧逼近的思想将其拆分成多个直纹面片ꎬ进而转化成多面片轨迹组合优化问题ꎬ并将其推广到类自然二次曲面的喷涂轨迹规划上ꎮ张鹏等[57]则针对直纹面片之间喷涂轨迹连接顺序问题引入粒子群算法ꎬ减少了轨迹规划时间ꎮ李翠明等[58]人使用改进的隶属云模型来调节蚁群算法中的信息素强度ꎬ并引入K-opt搜索策略对蚁群算法的局部搜索进行优化ꎬ提高了算法的搜索能力和求解速度ꎮ王秋爽等[59]引入稀疏分解的思想ꎬ将理想涂层厚度作为原始信号ꎬ通过贪婪算法中的正交匹配追踪算法求解得到工件点云数据的最佳切片位置和喷涂速率等参数ꎬ进而生成喷涂轨迹ꎮ温记明等[60]提出一种离散帝王蝶算法用于优化复杂曲面分片轨迹组合问题ꎬ在传统帝王蝶算法的基础上ꎬ使用贪婪算法对种群进行初始化ꎬ种群更新策略则采用模拟退火算法ꎬ提高了轨迹规划速度以及避免了轨迹交叉现象ꎮ4㊀总结与展望喷涂机器人的发展已有近半个世纪ꎬ研究人员在机器人构型和喷枪等结构设计上不断进行创新ꎬ同时在喷枪漆膜生长模型和喷涂轨迹规划问题上不断提出更加优越的新模型和新算法ꎬ整体朝着通用化㊁高精度㊁高品质的方向发展ꎮ本文针对木制家具喷涂机器人ꎬ介绍了喷涂机器人的构型和喷枪种类ꎬ分析了现有的喷枪漆膜生长模型和喷涂轨迹规划及优化问题ꎬ总结如表1所示ꎮ表1 主要研究问题总结喷涂机器人构型喷枪种类漆膜生长模型喷涂轨迹规划及优化固定式:结构简单ꎬ喷涂轨迹单一ꎮ往复式:易于控制ꎬ只能进行单面喷涂ꎮ框架式:需要一定控制算法ꎬ板式及简单结构家具外部表面喷涂ꎮ串联式:控制算法最为复杂ꎬ复杂异形家具表面和内部喷涂ꎮ 空气喷枪:适用涂料粘度范围大ꎬ涂料利用率低ꎮ无气喷枪:适用高粘度涂料ꎬ可形成较厚的漆膜ꎮ混气喷枪:喷涂初速度小ꎬ几乎无过喷反弹现象ꎬ涂料留着率高ꎮ静电喷枪:涂料损失很小留着率最高ꎮ无限范围模型(柯西分布模型和高斯分布模型):模型公式可推导ꎬ计算量小但模型准确度不高ꎮ有限范围模型(椭圆分布模型㊁抛物线分布模型㊁β分布模型等):能够更好地拟合实际漆膜厚度分布情况ꎬ但需要进行大量的喷涂实验计算模型参数ꎮ人工示教法:喷涂轨迹质量完全取决于工人经验ꎬ且工人需要直接暴露在喷涂环境中ꎮ自动轨迹规划方法:计算机直接生成喷涂轨迹ꎬ漆膜厚度均匀ꎬ避免工人暴露在喷涂环境中ꎬ但算法复杂ꎮ轨迹优化方法:提高面片间漆膜均匀度ꎬ提高轨迹质量ꎮ㊀㊀随着科技的不断发展ꎬ云计算[61]㊁增强现实(AR)[62]等许多新技术[63]应用在喷涂机器人上面ꎮ喷涂机器人构型方面ꎬ已有研究人员开发出在建筑等户外环境中使用的移动式喷涂机器人[64]ꎬ该类机器人工作更加灵巧ꎬ能够完成大型工件的喷涂作业ꎮ随着人们对产品质量要求的不断提高ꎬ高质量的漆膜和更加复杂的喷涂工艺是如今的发展趋势ꎬ喷涂轨迹规划及优化问题朝着多算法融合㊁基于复杂神经网络[65]㊁在线检测轨迹规划[66]等方向发展ꎮ参考文献:[1]㊀吴智慧.木家具制造工艺学[M].中国林业出版社ꎬ2012.[2]㊀王丽.喷涂项目对环境的影响分析及注意事项[J].中国资源综合利用ꎬ2019ꎬ37(6):156-158.[3]㊀曾敏生.影响涂料利用率因素及改进措施[J].涂料工业ꎬ2005(5):54-56+63.[4]㊀谭见君ꎬ范润宇.林业机器人研究现状与展望[J].林业机械与木工设备ꎬ2022ꎬ50(9):4-8.[5]㊀潘敬锋ꎬ訾斌ꎬ王正雨.基于试验与仿真联合分析的喷涂机器人轨迹精度可靠性研究[J].机械工程学报ꎬ2020ꎬ56(19):210-220. [6]㊀吴智慧ꎬ沈忠民.家居木制品表面机械自动与智能喷涂技术设备分析[J].林业机械与木工设备ꎬ2020ꎬ48(4):26-33. [7]㊀张延超ꎬ张永涛ꎬ卢红旗ꎬ等.基于PMAC的数码迷彩喷涂机器人运动控制方法[J].制造业自动化ꎬ2019ꎬ41(2):101-104. [8]㊀罗德宇ꎬ刘培义.环保喷涂技术在家具涂装中的应用研究[J].江9。
浅谈喷涂机在防水施工中的应用及推广
过去, 防水涂 料施 T 时通 常是 先现 场搅拌 , 然后
手工涂 刷或 滚涂 在墙 、 面及 顶板 , 少采用 机 械 喷 地 很
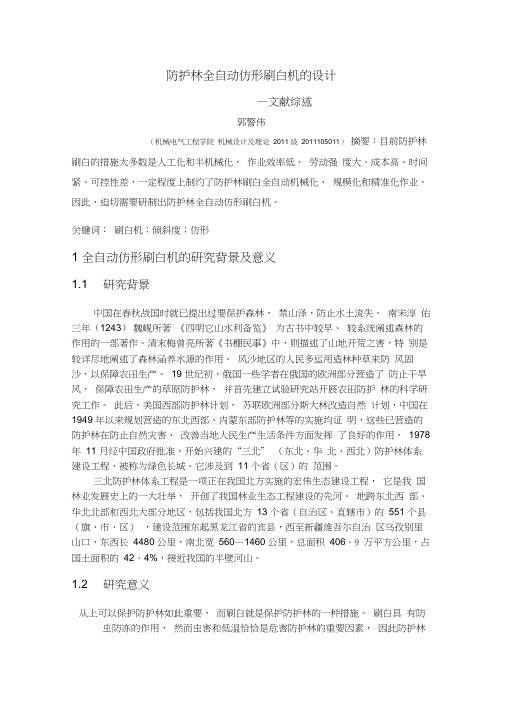
外 观见 图 1 )和实 用新 型 专利 ,外 观 专利 申请 号 为
2 13 2 0 9 ., 实 用 新 型 专 利 申 请 号 为 0 004 3 1 7 2 12 2 2 0 .。本文将对该 喷涂机 的相关情况 作一 0 0023 7 3 简单介 绍 。
收 稿 日期 :0 0 1 — 9 2 1—0 2 图 1 “ 施 特” 易 喷涂 机 外观
1 喷涂机 的结构及 工作原理 11 结构 .
该喷涂机 南空气 压缩机 、 气罐 、 挤机 、 储 搅 浆料挤
作者 简 介 : 京 福 , , 家港 市福 明 防水 防腐 材 料 有 限公 司总 蔡 男 张
关 键 词 : 涂机 ; 啧 防水 涂 料 ; 涂施 工 喷
文章 编 号 :07 4 7 (0 1一 4 04 — 3 10 — 9 X 2 1 )0 — 0 4 0
ห้องสมุดไป่ตู้
中图分 类 号 :U 43 T 6
文 献 标 识码 : A
Ap ia i n o p a i g M a hi n W a e pr o ng plc to fS r y n c nei tr o f i
课题 。就 日前 同 内的情 况来看 , 喷涂技术 及喷涂机 械
电气 控制 箱
机
泵
储气罐
的使 用范 同并 不是很广 , 特别是 防水涂料 唢涂机 几乎
没有得 到推广 , 因此 , 研发 和推广 防水 涂料 机 械喷涂 设备 , 提高 防水 涂料施 T技术水平 具有重要 意 义。 对 “ 易施特 ”防水涂料 喷涂机是 经过科研 人员 多年 研究 、 复改 良的成果 , 反 目前 已 申报外 观 专利 ( 喷涂机
海洋防腐冷喷涂技术的机理、特点及国内外发展现状综述
海洋防腐冷喷涂技术的机理、特点及国内外发展现状综述1 冷喷涂技术的起源通常情况下,一般的概念是当固态粒子碰撞到某种基体后将产生固态粒子对基体的冲蚀作用,然而,上世纪80年代中期前苏联科学院西伯利亚分部理论和应用机械研究所的科学家,在用示踪粒子进行超音速风洞试验时,发现当用作测速的示踪金属颗粒在其速度超过某一临界值时,粒子发生不断在基体靶材表面沉积的现象。
思路开阔的科学家萌发了由固态粒子沉积涂层的想法,由此在1990提出了冷喷涂的概念。
经过试验发现,要使高速固态粒子在基体表面沉积,粒子的速度需要超过某一临界值,该临界值与金属材料的种类有关,一般认为400m/s~500m/s。
与热喷涂技术相比,冷喷涂中的粒子属于低温而高速,低温指粒子的温度一般远低于材料的熔点,即以完全固态碰撞基体表面,而传统的热喷涂需要粒子完全熔化,或在半熔化的液固两相状态下沉积涂层;高速则指粒子速度一般达到500m/s~1000m/s的状态。
因此,冷喷涂实际上可以认为是粒子温度与速度向低温与高速进一步拓展而发展起来的新型热喷涂方法。
2 冷喷涂涂层的沉积机理冷喷涂技术的根本原理是:由一高速“冷”喷涂粒子流在一“冷”基体表面喷涂上涂层。
喷涂过程中撞击基体是形成涂层还是对基体喷丸或产生冲蚀作用,取决于粒子的速度。
对于一种材料,存在一定的临界速度,当大于该速度,形成涂层;而小于该速度,将发生冲蚀现象。
此外,这个关键速度的大小由冷喷涂粒子本身性质和基体共同决定。
冷喷涂过程一般会分为几个阶段,按照Van Steenkiste 等的研究发现,铝在金属表面的冷喷涂形成过程分为三个阶段,第一阶段是基体凹陷和第一层颗粒积聚;第二阶段是颗粒形变和重排;最后的第三阶段是冶金焊接形成和空隙的减少。
对于冷喷涂颗粒在基体表面的沉积机理目前为止还缺乏深入的了解。
一种普遍的冷喷涂沉积理论认为,在冲击过程中,固体颗粒发生弹性形变,破坏了目标靶体原来的表面,并在局部高压下与表面紧密接触,从而发生粘结。
喷涂机器人系统及应用分析
北京深隆喷涂机器人系统及应用分析喷涂机器人的大量运用极大地解放了在危险环境下工作的劳动力,也极大提高了汽车制造企业的生产效率,并带来稳定的喷涂质量,降低成品返修率,同时提高了油漆利用率,减少废油漆、废溶剂的排放,有助于构建环保的绿色工厂。
目前国际市场上供应的喷涂机器人18OI13O803大致可分为以下几类:按是否具有沿着车身输送链运行方向水平移动的功能,分为带轨道式和固定安装式机器人;按安装位置的不同,分为落地式和悬臂式机器人。
落地式机器人具有易于维护清洁的优点。
带轨道式机器人则具有工作范围相对较大的优点。
而悬臂式机器人则可减少喷房宽度尺寸,达到减少能耗的作用。
北京深隆科技有限公司的主要产品及服务为机器人智能涂装线、工业机器人应用及成套装备、涂装自动化生产线集成三大系列,以解放低端劳动力、改善有害工作环境为导向,以工业机器人集成应用为基础,以行业应用的个性化方案定制为核心,业务领域包括3C产品、汽车零部件等表面处理、重工、军工、航空、新能源等行业。
产品包括:工业机器人喷涂生产线,自动涂装生产线,全自动点涂胶机器人, 自动上下料机器人自动玻璃点涂胶机器人,自动锁镙丝机器人,自动上下料机器人、 CCD视觉定位锁镙丝机,工业机器人配件、机器人工装,夹具,气动夹具,气动工装,气动模具,装配夹具,装配卡具等。
喷涂线设备以我公司涂装车间技术改造项目为例,车间原有一条自动化整车喷涂线,以功能来划分喷房单元。
中涂采用4台落地式固定安装机器人,色漆采用8台落地式带轨道机器人,清漆同样采用8台落地式带轨道机器人。
为了提高生产节拍,本次技术改造方案为:在中涂区域新增4台相同型号的落地式固定安装机器人18OI13O803。
新建一条面漆线,其中色漆区域采用8台悬臂式带轨道机器人,清漆区域同样采用8台悬臂式带轨道机器人。
成套设备从美国进口,改造完成后可将生产节拍提高1倍。
喷房系统单元平面示意图见图1。
无论是何种类型的机器人设备,其系统应用原理都是相似的,主要子功能部分为:悬臂式带轨道机器人。
喷涂作业场所火灾和事故防范论文

喷涂作业场所火灾和事故防范[摘要]随着装修装潢行业的快速扩容,涂料使用大量增加,涂料业的安全事故也逐年增多,本文对喷涂作业场所的危险性进行了阐述,分析了事故的原因,提出了一些防范对策和注意事项,旨在减少喷涂作业场所安全事故的发生。
[关键词]喷涂安全事故防范随着我国国民经济的高速增长,涂料业的安全事故也有逐年增多的趋势。
涂料产品种类繁多,所需原料涉及多种类别,包括有机醇、有机酸、树脂、颜填料、助剂、溶剂等,这些原料和产品中除了无机颜填料外都是有机物,均属易燃物,有些还是剧毒品,绝大部分已被列入《危险化学品名录》。
一、喷涂作业场所的危险性分析在喷涂场所生产操作过程中,从原料到成品都存在着易燃易爆、有毒有害等危险特性,容易引起火灾、爆炸、中毒、灼伤或其他事故。
1、火灾爆炸危险。
通常采用的喷涂方法是将各种漆料用高压空气或高压静电场,使漆料雾化附着在产品表面。
由于在漆料中一般含有大量低闪点的易燃、易爆、易挥发的各种稀释剂,作业时,这些稀释剂和漆雾有相当大的一部分将散发到车间内。
这些稀释剂蒸气和漆雾与空气混合到燃烧爆炸浓度时,一遇明火或火花就将发生火灾爆炸。
2、中毒危害。
涂料稀释剂通常由一种或几种溶剂组成,这些溶剂一般是酯类、酮类、醇类和芳烃等,如苯、甲苯、二甲苯、氯苯、丁醇、环己酮、环己烷和乙酸丁酯等,这些溶剂对人体都有较大的危害。
此外,涂料中还可能含有致人中毒的铬和铜的化合物,因此,喷涂作业中的毒物危害十分严重。
3、粉尘危害。
粉末静电喷涂使用的是粉末涂料,喷粉室、粉末回收系统等设计不合理或设备发生故障时会出现粉尘危害的问题。
粉料细度很小,在空气中长时间漂浮而不降落,人员长期接触会危害健康,如累计到一定的量,可引起肺病。
具有致癌性的粉尘对健康的危害就更严重。
4、静电危害。
在喷涂施工中,当气泵强大的压力使涂料从喷枪中急速喷出时,由于激烈的摩擦和涂料迅速脱离喷枪,就会产生大量静电荷。
这些电荷如果无从泄露或泄露不及时,就会很快蓄积成静电。
防护林喷涂机的文献综述.docx
防护林全自动仿形刷白机的设计—文献综述郭警伟(机械电气工程学院机械设计及理论2011 级2011105011)摘要:目前防护林刷白的措施大多数是人工化和半机械化,作业效率低、劳动强度大、成本高、时间紧、可控性差,一定程度上制约了防护林刷白全自动机械化、规模化和精准化作业。
因此,迫切需要研制出防护林全自动仿形刷白机。
关键词:刷白机;倾斜度;仿形1 全自动仿形刷白机的研究背景及意义1.1 研究背景中国在春秋战国时就已提出过要保护森林,禁山泽,防止水土流失。
南宋淳佑三年(1243)魏岘所著《四明它山水利备览》为古书中较早、较系统阐述森林的作用的一部著作。
清末梅曾亮所著《书棚民事》中,则描述了山地开荒之害,特别是较详尽地阐述了森林涵养水源的作用。
风沙地区的人民多运用造林种草来防风固沙,以保障农田生产。
19 世纪初,俄国一些学者在俄国的欧洲部分营造了防止干旱风,保障农田生产的草原防护林,并首先建立试验研究站开展农田防护林的科学研究工作。
此后,美国西部防护林计划,苏联欧洲部分斯大林改造自然计划,中国在1949 年以来规划营造的东北西部、内蒙东部防护林等的实施均证明,这些已营造的防护林在防止自然灾害、改善当地人民生产生活条件方面发挥了良好的作用。
1978 年11 月经中国政府批准,开始兴建的“三北” (东北、华北、西北)防护林体系建设工程,被称为绿色长城。
它涉及到11 个省(区)的范围。
三北防护林体系工程是一项正在我国北方实施的宏伟生态建设工程,它是我国林业发展史上的一大壮举,开创了我国林业生态工程建设的先河。
地跨东北西部、华北北部和西北大部分地区,包括我国北方13 个省(自治区、直辖市)的551 个县(旗、市、区),建设范围东起黑龙江省的宾县,西至新疆维吾尔自治区乌孜别里山口,东西长4480 公里,南北宽560—1460 公里,总面积406.9 万平方公里,占国土面积的42.4%,接近我国的半壁河山。
1.2 研究意义从上可以保护防护林如此重要,而刷白就是保护防护林的一种措施。
城市绿化干道树干保护层喷涂机器人本体设计
第6期2021年6月机械设计与制造Machinery Design & Manufacture 160城市绿化干道树干保护层喷涂机器人本体设计马金茹谢兵2,祁宇明2,宋培培2(1.北京电子科技职业学院汽车工程学院,北京100176;2.天津职业技术师范大学机器人及智能装备研究所,天津300222)摘要:目前在城市绿化干道树干保护层的喷涂方式上仍大多数采用手工涂白,其涂抹工作劳动强度大、喷涂不均匀、工 作效率低;少数采用自动化喷涂方式,但操作步骤繁琐。
针对九种现象设计出一种低碳运行、成本低廉、药水利用率高的树干保护层喷涂机器人。
该系统中,链轮锥齿轮同步协作实现药箱搅拌;手自一体保证了环形喷涂机械手的正常作业;链轮、飞轮、曲柄滑块相互配合实现了药箱加压。
经试验证明:此喷涂机器人采用手动、自动一体化方式,可有效减少碳排放并保证在多变环境下高效地完成喷涂作业任务。
关键词:城市绿化干道树干保护层;保护层喷涂机器人;环形喷涂机械手;药箱加压机构;ANSYS中图分类号:TH16;TH460文献标识码:A 文章编号:1001-3997(2021)06-0160-04Spraying Robot for Trunk Protection of Urban Greening Trunk RoadsMA Jin-ru 1, XIE Bing 2, QI Yu-ming 2, SONG Pei-pei 2(1.School of Automotive Engineering , Beijing Polytechnic , Beijing 100176, China ; 2.1nstitute of Robotics and Intelligent Equipment , Tianjin University of Technology and Education , Tianjin 300222, China)Abstract present, most of t he spraying methods of t ree trunk protective coatings on urban greening trunk are manual whiten ing, which is characterized by high labor intensity , uneven spraying and low efficiency. A few of t hem adopt automatic spraying, but the operation steps are cumbersome.Aiming at this phenomenon , a spraying robot with low carbon operation,low cost and highutilization rate of m edicinal liquid was designed. In this system, sprocket bevel gears cooperate synchronously to mix the medicine box; hand-in-hand ensures the normal operation of t he annular spraying manipulator; sprocket ,flywheel , crank and slider coop erate with each other to realize the medicine box pressurization.Experiments show that the spraying robot can effectively reduce car bon emissions and ensure the efficient completion of s praying tasks in changeable environments by using manual and automaticintegration mode.Key Words :Urban Greening Main Road Tree Trunk Protective Layer ; Protective Layer Spraying Robot ; Ring Sp- i •町ing Manipulator ; Medicine Box Pressure Mechanism ; ANSYS1引言为了有效地阻止并杀死寄附在树干上的害虫与病菌以及防 止树干被灼伤、冻伤,园林工人采取对树干进行刷白的措施W根据对国内树干保护层喷涂方式的相关调研报告指出叫80%城市绿化干道树干依旧采用人工手动涂白,仅有20%借助相关机械 喷涂(主要集中于北京、天津等大城市),其中以“人工背负+手动喷涂”方式为主。
喷涂技术在环保设备中的应用
喷涂技术在环保设备中的应用随着环境问题的日益严重,人们开始重视环境保护。
越来越多的企业开始关注环保设备的研制和应用,以减少环境污染。
而喷涂技术就是一种在环保设备中广泛应用的技术。
本文将介绍喷涂技术在环保设备中的应用及其优点。
一、喷涂技术介绍喷涂技术是一种涂装技术,主要是利用喷涡将涂料喷洒到物体表面。
喷涂技术的主要优点是:涂层均匀、膜厚均匀、能够精确控制涂料的用量和喷射方向,可以完成高质量高效率的工作。
喷涂技术的主要适用领域包括汽车、航空航天、建筑等工程领域。
而在环保设备领域,喷涂技术也被广泛应用。
二、1. 雾炮喷涂雾炮喷涂是在建筑施工和环保设备中广泛应用的一种喷涂技术。
它是在高空或露天场地使用的,可以将水雾或其他液体喷射到某个地点,以减少空气中的污染。
雾炮喷涂的主要功能是在露天场地和城市路段等公共场所进行空气清洁和空气净化。
它可以将大气中的悬浮颗粒、细菌和病毒等污染物清洗掉,以保护人们的健康和生命安全。
2. 涂装喷涂涂装喷涂是在环保设备领域中应用较广的一种喷涂技术。
它主要是用于环保设备的维护和修复工作中,可以对环保设备进行喷涂和涂装,以达到对环境污染的控制。
涂装喷涂的主要优点在于:能够使环保设备的表面变得平滑,减少空气阻力和损耗,并增加设备的使用寿命。
此外,它还能防止环保设备受到腐蚀、侵蚀和氧化等自然环境的影响。
3. 喷雾干燥喷雾干燥是一种将液态物质变成固态物质的喷涂技术,主要用于环保设备的处理和生产。
它将液态物质快速转换成粉状或颗粒状物质,以适应环保设备处理的要求。
喷雾干燥的主要功能在于将一些高湿度的物质变成干燥物质,以减少环保设备中的湿度。
这将使环保设备中的气体排放更少,更有利于环保设备的正常运行和污染治理。
三、喷涂技术在环保设备中的优点1. 安全性高喷涂技术在环保设备中的应用相对于其他涂装技术来说,具有更高的安全性。
这是因为喷涂技术的喷液可以直接精确的喷到物体表面,而不需要进行人工处理。
这大大降低了人为操作的风险。
喷漆工艺及其污染治理探究郭连涛
喷漆工艺及其污染治理探究郭连涛发布时间:2021-09-24T12:49:44.491Z 来源:《防护工程》2021年14期作者:郭连涛[导读] 我国是机械制造大国,机械喷涂是机械制造行业常见的工序,喷涂过程产生有机废气等污染物。
近年来,有机废气污染物控制越来越得到重视,在环境影响评价中,必须了解机械喷涂类项目的工艺、污染源强,从而提出可行的污染防治措施,为企业的环保设施建设、环保管理提供依据。
喷漆工艺是日常生活和生产中应用范围最广的装饰喷涂项目,喷漆工艺作为一种装饰性与实用性兼具的工艺在建筑工程、汽车制造、包装等各方面都有十分广泛的应用。
对喷漆工艺中的污染进行有效治理,对保障环境质量,保护人体健康具有十分重要的意义。
郭连涛哈尔滨飞机工业集团有限责任公司黑龙江哈尔滨 150060摘要:我国是机械制造大国,机械喷涂是机械制造行业常见的工序,喷涂过程产生有机废气等污染物。
近年来,有机废气污染物控制越来越得到重视,在环境影响评价中,必须了解机械喷涂类项目的工艺、污染源强,从而提出可行的污染防治措施,为企业的环保设施建设、环保管理提供依据。
喷漆工艺是日常生活和生产中应用范围最广的装饰喷涂项目,喷漆工艺作为一种装饰性与实用性兼具的工艺在建筑工程、汽车制造、包装等各方面都有十分广泛的应用。
对喷漆工艺中的污染进行有效治理,对保障环境质量,保护人体健康具有十分重要的意义。
关键词:喷漆工艺;污染治理;治理大部分机械是由我们国家制造的,在机械制造过程中,机械外表的漆面是由机械喷涂完成的,而在生产工序上会产生很多污染。
为了进一步控制废气污染,我们国家相继颁布了相关控制废气污染的法律法规。
喷漆工艺是目前被广泛应用于日常生产生活的一种工艺流程,具有实用性和装饰性效果。
喷漆工艺中由于喷漆材料的毒性和喷漆流程的挥发性很容易造成对环境的污染,或者对人体的危害。
充分了解喷漆工艺机器污染的治理有利于对环境进行保护,并保障人体的健康。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
防护林全自动仿形刷白机的设计—文献综述郭警伟(机械电气工程学院机械设计及理论2011级2011105011)摘要:目前防护林刷白的措施大多数是人工化和半机械化,作业效率低、劳动强度大、成本高、时间紧、可控性差,一定程度上制约了防护林刷白全自动机械化、规模化和精准化作业。
因此,迫切需要研制出防护林全自动仿形刷白机。
关键词:刷白机;倾斜度;仿形1全自动仿形刷白机的研究背景及意义1.1研究背景中国在春秋战国时就已提出过要保护森林,禁山泽,防止水土流失。
南宋淳佑三年(1243)魏岘所著《四明它山水利备览》为古书中较早、较系统阐述森林的作用的一部著作。
清末梅曾亮所著《书棚民事》中,则描述了山地开荒之害,特别是较详尽地阐述了森林涵养水源的作用。
风沙地区的人民多运用造林种草来防风固沙,以保障农田生产。
19世纪初,俄国一些学者在俄国的欧洲部分营造了防止干旱风,保障农田生产的草原防护林,并首先建立试验研究站开展农田防护林的科学研究工作。
此后,美国西部防护林计划,苏联欧洲部分斯大林改造自然计划,中国在1949年以来规划营造的东北西部、内蒙东部防护林等的实施均证明,这些已营造的防护林在防止自然灾害、改善当地人民生产生活条件方面发挥了良好的作用。
1978年11月经中国政府批准,开始兴建的“三北”(东北、华北、西北)防护林体系建设工程,被称为绿色长城。
它涉及到11个省(区)的范围。
三北防护林体系工程是一项正在我国北方实施的宏伟生态建设工程,它是我国林业发展史上的一大壮举,开创了我国林业生态工程建设的先河。
地跨东北西部、华北北部和西北大部分地区,包括我国北方13个省(自治区、直辖市)的551个县(旗、市、区),建设范围东起黑龙江省的宾县,西至新疆维吾尔自治区乌孜别里山口,东西长4480公里,南北宽560—1460公里,总面积406.9万平方公里,占国土面积的42.4%,接近我国的半壁河山。
1.2研究意义从上可以保护防护林如此重要,而刷白就是保护防护林的一种措施。
刷白具有防虫防冻的作用,然而虫害和低温恰恰是危害防护林的重要因素,因此防护林刷白对于保持水土、防风固沙、涵养水源、调节气候、减少污染而言,至关重要。
目前防护林刷白的措施大多数是人工化和半机械化,作业效率低、劳动强度大、成本高、时间紧、可控性差,一定程度上制约了防护林刷白全自动机械化、规模化和精准化作业。
因此,迫切需要研制出防护林全自动仿形刷白机。
2国内外研究现状及分析2.1关于树木刷白的喷涂机国内外研究现状及分析2.1.1国外喷涂机研究现状及分析2.1.2国内喷涂机研究现状及分析关于树干刷白的自动化设备研究,发明专利ZL200810061760.8中提出了一类树木涂白机器,其利用“上下运动,边涂边刷”的方式实现树木涂白工作。
但是这种机器存在着工作死角、涂刷树木周向无法完全覆盖、涂刷质量一般等不足。
2008年05月22日浙江工业大学申请了专利,并经过三年左右的时间,到2011年02月24日重新申请了专利。
其结构如图1[1]:1.车架2.旋转传动机构3.上下升降运动架4.毛刷机构5.供液机构1-1.车轮图1树木涂白结构示意图本发明采用了旋转运动与上下进给运动复合的传动机构,实现对树干的旋转涂刷,能减少涂刷的工作盲区,避免树干表面的“漏洞”现象,同时刷图质量得到进一步的改善的技术。
此发明主要解决了如下几个问题:1、有效消除了工作死角、提升了涂刷质量;2、适应性强;3、有效节约石灰水、降低成本。
2008年11月,上海大学申请了全自动智能化树干涂白机的专利。
其结构如图2[2]:图2全自动智能化树干涂白机结构示意图该发明在控制方面,涂白机以PLC(可编程控制器)作为下位机的核心控制系统对机器人进行实时控制,同时,在下位机也采用了触摸屏,提供手动控制。
上位机则使用PC机通过无线RS232串口与下位机相连,实现对机器人的远程监控。
而且在控制中还建立了视觉处理系统,利用机器视觉判别树木和轮廓提取,攻克了智能识别树木以及自动避障等技术。
控制系统结合激光传感器、超声波传感器以及视觉处理等功能,使得机器人具有自动行走、定位、检测并识别树木以及避障等人工智能,实现涂白机工作全过程的智能化。
其整体模型如图3[2]:图3全自动智能化树干涂白机整体模型图经测试所研制的涂白机从寻找树木到完成对一棵树木进行全方位喷涂的工作不到30秒钟的时间,而人工涂刷则至少需要3分钟,达到了设计的目的[2]。
2.2本章小结综上所述,以上几种涂白机,自动化越来越高,并且在不同时间阶段攻克了相应的技术难点。
但是仍然不能高精度,高效率的解决喷涂工作,可知树木倾斜度的自动检测技术和刷白机机械手臂仿形是急需解决的问题,单从硬件方面设计不能从根本上解决这一问题,还应该在检测、控制等软件方面着手。
软硬结合,对防护林全自动仿形刷白机作深入地研究。
目前制约树木刷白机发展的原因主要是树木倾斜度检测不准,树木分叉难以排除,喷涂精度不高,连续作业较低。
因此,迫切需要研制出喷涂精度高、综合性能好的全自动仿形刷白机。
而机械手臂的仿形是防护林刷白机的重要组成部分,同时也是能否实现树木高精度、高效率喷涂的关键。
它不但可以提高防护林刷白喷涂机的精度、树木的单位面积,还能提高树木喷涂的效率。
防护林全自动刷白控制系统的研究主要包括树木高度的自动检测技术和喷涂机械手臂升降的自动控制技术这两个方面。
3关于国内倾斜度的自动检测技术和机械手臂仿形的研究3.1倾斜度的检测技术应用及概括目前,自动检测倾斜度的技术发展已经相当成熟,应用也相当广泛,采用的技术方法也是多种多样的。
2008年同济大学建筑工程系路鑫、谷川发表了《高层建筑倾斜检测方法研究》。
本文根据实际工程需要采用了一种适于高层建筑主体倾斜观测的新方法,并论述了该方法的原理。
分析了该方法所能达到的精度,并且将该方法应用于一个工程实例并验证其有效性。
结论表明,本文提出的新方法具有一定的实用性和优越性[3]。
2009年北京林业大学吴晓兰发表了《基于数字图像处理的立木测量方法研究》。
本论文的研究目的是为了建立一套自动的立木测量系统,来实现林木资源调查管理的信息化、自动化及精确化,从而改善传统的林木调查方法与技术。
并提出了运用最小二乘法原理求树干边缘斜率,从而推算树干倾斜度的方法[4]。
2010年3月中北大学贡丽霞、白艳萍发表了《基于Radon变换和坎尼边缘检测的倾斜车牌校正方法研究》。
文章基于Radon变换的思想,先利用Canny边缘检测器检测车牌边缘,再利用Radon变换搜索构成车牌矩形的直线段,并计算其倾斜角来校正倾斜车牌。
测试结果表明该方法能准确地检测出图像的倾斜角,并取得良好的效果[5]。
2010年10月21日大连理工大学王永青、淘冶等申请了《激光位移传感器倾斜角误差的检测装置及方法》专利。
该发明采用激光位移传感器进行动态寻边的检测方法,保证激光位移传感器的出射光线准确地投射到实验被测表面中线上。
该装置实现了倾斜角误差的测量,为后续的倾斜角误差补偿提供了数据依据,测量精度高,操作简单,适用性强[6]。
2011年7月清华大学段汝娇、赵伟、黄松岭、陈建业发表了《基于计算机视觉的接触网定位器倾斜度自动测量方法》。
本文应用图像分割、剔除干扰线、图像细化等算法,对采集到的接触网定位装置的图像进行处理;然后用改进的Hough变换检测细化后的图像,对图像中相邻的特征象素点进行聚类并做感知编组;最后用随机Hough变换(RHT)使经感知编组后图像中的每条线段更接近直线,进而计算出接触网定位装置中定位器的倾斜度[7]。
3.2机械手臂仿形应用及概括随着制造业的加工精度和自动化程度的不断提高,特别是航空航天、汽车工业和模具工业的发展,对机械手臂的仿形要求越来越迫切。
2004年西北农林科技大学杨青等人发表了《仿形喷洒变量施水精确灌溉技术研究进展》。
文中指出要加强仿形喷洒变量施水喷头关键部件结构尺寸对其性能参数影响的理论和试验研究,为喷头优化设计提供依据[8]。
2006年4月东北大学林文强、隋天中、崔秀梅发表了《激光三角测头的动态仿形跟踪扫描》。
对非接触式三坐标测量机仿形跟踪快速扫描方法进行了研究,分析了曲面仿形跟踪扫瞄过程中的关键技术。
针对基于激光非接触测量的仿形跟踪扫瞄,提出一种确定扫描速度及跟动速度的计算方法[9]。
2006年华南农业大学张建瓴、陈树军、可欣荣、洪添胜发表了《仿形喷雾装置的设计及分析》。
从实现仿形运动的角度出发,设计一种果树仿形喷雾装置。
该系统主要由仿形机构、喷雾部分和单片机检测及控制部分组成。
主要介绍仿形喷雾装置的机械结构部分的设计,并分析仿形机构,特别是喷头的运动及运动空间,最后给出喷头位置控制的仿真算例[10]。
2008年8月石河子大学胡斌、罗昕、唐军等发表了《3MDZK-12型单行仿形棉花打顶机的结构设计与性能试验研究》。
本文在整体仿形棉花打顶机基础上,研制设计了可实现各行独立仿形打顶作业的3MDZK-12型棉花打顶机,介绍了其总体结构和工作原理,分析确定了该机齿带组合的传动系统、滚筒式切割器、切割器升降控制机构及套筒式平衡仿形机架等关键部件的结构及参数[11]。
3.3本章小结综上所述,考虑到实用性和经济性,对于全自动仿形刷白机,我们可以用红外线或者超声波测距,检测出倾斜度,然后通过传感器转变成数据,输入计算机,再通过控制系统控制机械手臂仿形,进行喷刷。
4总结目前树木刷白机的研究还处于初级阶段,对排除树木分叉,检测树木倾斜度,连续作业等都不能很好的完成,因此迫切需要研制出全自动仿形刷白机。
考虑到经济和实用性,在此提出此方案:考虑到地形,选用拖拉机作为牵引动力;考虑到石灰水容易沉淀,石灰水箱,用搅棒使其不断处于搅动中。
考虑到便于更换和经济性,设计40cm长毛刷子n个,按照120cm的要求需要三个并排垂直安装在机械臂刷子套上;考虑到采用刷树的方式,采用“有力出液,无力不出液”的一个阀门装置,即刷子触碰到树,力产生,阀门打开,则出石灰水;刷子离开树,力消失,阀门关闭。
比如液体鞋油盒就是其中一个简易装置。
(导师补充:刷树可采用回转装置,以180度为周期补液)。
考虑到采用喷树方式的时效性,将三个喷头分别垂直、均匀的安装到装置上采用“有树即喷,无树不喷”的装置。
因为液体会顺着树往下流动,为了减少沉积,三个喷头的喷孔从上往下依次变小,即最上面的喷头喷孔最大。
(导师补充:在装置上面对称安装喷头,各自控制90°左右的范围,本着尽量不重叠的原则,利用反射板调整角度)。
考虑到便于连续作业,利用平行四杆机构设计两对机械手臂对称安装到拖拉机上面,然后拖拉机在导航仪的指引下,完成两排树木各一半的喷刷;考虑到便于检测树木的倾斜度和分叉,在拖拉机头方向安装三个红外线传感器或者安装超声波传感器,以树根为始点,以120cm为终点,垂直均匀安装到拖拉机头前,能及时将数据传输到计算机上面,给喷刷下一棵树留出足够的仿形和排除时间。